Изобретение относится к медицине, а именно к эндоскопии, и может быть использовано для определения положения дистального конца аппарата при проведении эндоскопического исследования желудочно-кишечного тракта (ЖКТ), в частности, при колоноскопии.
Известен ряд изобретений, где описаны технические решения, в которых используют электромагнитное излучение и компьютерное моделирование для определения положения колоноскопа при проведении колоноскопии [1,2,3]. Среди данных методов можно выделить: систему "NeoGuide" принцип работы которой заключается в определении взаимного положения расположенных продольно сегментов эндоскопа, за счет чего можно определить положение дистальной части; систему "ScopeGuide", позволяющую визуализировать положение аппарата с помощью определения положения магнитных колец, расположенных на протяжении эндоскопа.
Наиболее близким техническим решением является способ определения местоположения волокон оптической эндомикроскопии с помощью сверхчувствительной видеокамеры для отслеживания баллистических и змеиных фотонов, образующихся в результате подачи через оптическое волокно эндоскопа коротких импульсов лазерного излучения и фильтрации полученной картины рассеяния фотонов от пиков видимого излучения [4].
Такой способ позволяет достаточно точно определить положение дистального конца эндоскопа без необходимости изменения конструкции самого эндоскопа и применения сложных технических средств.
Однако, данный способ требует применения сложной высокочувствительной аппаратуры, загромождает рабочее место специалиста, усложняет проведение исследования.
Задачей заявляемого изобретения является определение положения дистального конца эндоскопа при проведении эндоскопических исследований, используя звуковые волны, генерируемые на дистальном конце при инсуффляции газов или жидкостей, аспирации кишечного содержимого.
Технический результат - упрощение способа определения положения дистального конца эндоскопа при проведении исследований по локализации шумов, возникающих в процессе работы аппарата на его дистальном конце.
Технический результат достигается тем, что при проведении эндоскопа в полость органа пациента, положение его дистального конца определяют аускультативно, для чего путем выслушивания определяют местоположение источника шумов, возникающих на дистальном конце аппарата и специфических для эндоскопического исследования, используя диагностические приборы (фонендоскоп, стетоскоп и др.), способные улавливать данные звуки.
О способе определения положения дистального конца эндоскопа аускультативно, приводящему к новому техническому результату, в практике и литературе, неизвестно, что позволяет сделать вывод о соответствии заявляемого решения критериям «новизна» и «изобретательский уровень».
Изобретение реализуется при помощи известных технических средств, поэтому оно соответствует критерию "промышленная применимость".
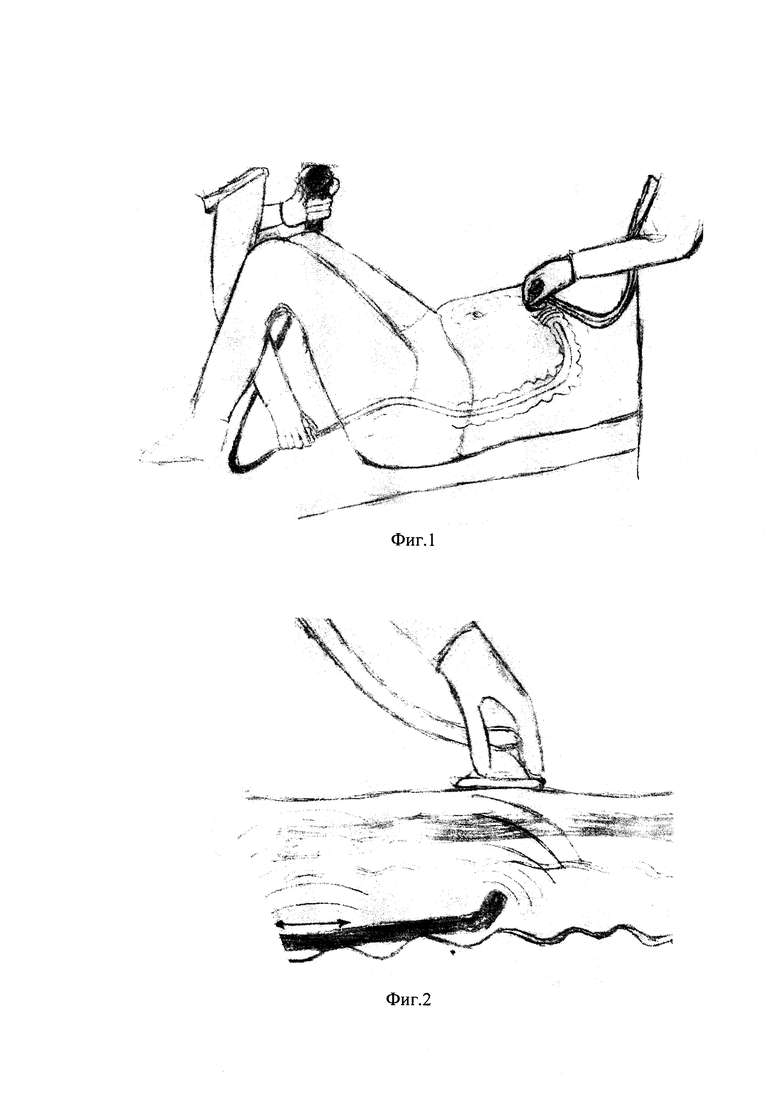
Заявляемое изобретение иллюстрируется схемами, где
на фиг.1 изображено проведение колоноскопии с применением описанного метода определения положения эндоскопа (показано расположение аппарата)
на фиг.2 показаны структуры организма пациента в разрезе во время проведения колоноскопии с применением описанного метода
Изобретение осуществляют следующим образом.
Производится эндоскопическое исследование: эндоскоп вводят в просвет исследуемого органа. В процессе движения эндоскопа с помощью диагностического прибора, например стетоскопа, фонендоскопа или других подобных инструментов, через переднюю брюшную стенку на уровне топографии исследуемых полостей выполняют аускультацию шумов, которые возникают в процессе работы аппарата. Примерами создаваемых шумов может служить аспирация кишечного содержимого, инсуффляция газа или перфузия жидкости в полость ЖКТ и т.д. По локализации шумов устанавливают местоположение дистального конца аппарата.
Предлагаемый способ аускультативного определения дистального конца эндоскопа в отличие от реализованных ранее технологических решений не требует сложных технических устройств.
Клинический пример 1. Пациентка К. 1965 г.р. Рост: 164 см.; Вес: 106 кг; ИМТ: 26.7; Ожирение: 2-3. Полных лет: 55. Направлена на ФКС участковым терапевтом с целью исключить онкологическое заболевание толстого кишечника.
Начало исследования 15:15. Окончание 16:05
В связи с повышенной массой тела и мегадолихосигма произошло двойное образование петли в сигмовидной кишке, избыточное введение аппарата в кишечник пациентки. В связи с недостаточным опытом врача произошла утрата ориентации, то есть, эндоскопист не мог определить положение дистальной части аппарата относительно области живота и отдела кишечника. Для определения положения дистального конца аппарата был использован предлагаемый способ аускультации. Ориентиром послужили шумы, издаваемые эндоскопом при аспирации кишечного содержимого и инсуффляции воздуха в просвет кишки. По локализации шумов определили точное местоположение дистального конца аппарата и с помощью оперативных приемов (сборивания кишки, ручное пособие, альфа-поворот) было успешно выполнено диагностическое исследование и выявлено полиповидное образование купола слепой кишки 02А+2С.
Клинический пример 2. Пациентка Р. 1962 г.р. Рост: 174 см.; Вес: 80 кг; ИМТ: 26.4; Избыток массы тела. Полных лет: 58. Направлена на энтероскопию участковым терапевтом с целью исключить онкологическое заболевание тонкого кишечника.
Начало исследования 13:00. Окончание 15.25.
При проведении исследования был обнаружен полип. Для определения локализации данного полипа для упрощения проведения будущей полипэктомии была определена локализация образования. Ориентиром послужили шумы, издаваемые дистальным концом эндоскопа, находящегося в непосредственной близости от полипа, при аспирации кишечного содержимого и инсуффляции воздуха в просвет кишки. По локализации шумов определили точное местоположение дистального конца аппарата и расположенного в непосредственной близости от него полипа. На следующей день проведена полипэктомия и данное новообразование было успешно удалено.
Клинический пример 3. Пациент С. 1983 г.р. Поступил в неотложном порядке в приемное отделение хирургического корпуса ЦГКБ с диагнозом: острая тонкокишечная непроходимость.
Начало исследования 10:20. Окончание 12:00
Спаечная болезнь отсутствовала, операции не было. Для определения препятствия проведена энтероскопия. Выявлена обтурация просвета инородным телом (кусок стекла). Для обеспечения малоинвазивного доступа при проведении операции по извлечению инородного тела проведена аускультация с точным определением положения препятствия. Пациент успешно прооперирован. Послеоперационный период без осложнений.
Клинический пример 4. Пациент А. 1962 г.р. Поступил в неотложном порядке в приемное отделение хирургического корпуса ЦГКБ с диагнозом: кишечное кровотечение.
Начало исследования 13:45. Окончание 14:20.
После сокращенной подготовки в неотложном порядке проведено фиброколоноскопическое исследование. В просвете толстой кишки обнаружена старая кровь в большом количестве. Неквалифицированная ассистенция с некачественным ручным пособием привели к петлеобразованию и растяжению сигмовидной кишки. С помощью аускультации было определено положение колоноскопа и места вероятного формирования петель аппарата. С помощью сборивания кишки аппаратом данные петли были устранены. Исследование успешно завершено и проведено в полном объеме.
Используемая литература.
1. J. Striegel Determining scope position during colonoscopy without use of ionizing radiation or magnetic imaging/ J. Striegel, R. Jakobs, J. Van Dam, U. Weickert, et al. // Surgical Endoscopy. - Luxembourg, 2011. - issue 25. - p. 636-640.
2. L. Y. Ching Non-radiological colonoscope tracking. Image guided Colonoscopy using commercially available Electromagnetic Tracking System/ L. Y. Ching, K. Moller, J. Suthakorn // 2010 IEEE Conference on Robotics, Automation and Mechtronics, RAM 2010. - Singapore, 2011. - p. 62-67.
3. Zhang Lunwei FBG Sensor Devices for Spatial Shape Detection of Intelligent Colonoscope / Qian Jinwu, Shen Linyong Bang Yanan // 2004 IEEE Conference on Robotics, Automation and Mechtronics. - New Orleans, 2004. - p. 835-840.
4. M. G. Tanner Ballistic and snake photon imaging for locating optical endomicroscopy fibres / T. R. Choudhary, Т. H. Craven, B. Mills, M. Bradley, R. K. Henderson, K. Dhaliwal, and R. R. Thomson// Biomed. Opt. Express 8, 2017. - p. 4077-4095.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эндоскопическая видеокапсула | 2023 |
|
RU2824707C1 |
| Способ фиксации петель кишечника при выполнении лечебных вмешательств в толстой и тонкой кишке | 2023 |
|
RU2805342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОРФОЛОГИЧЕСКОЙ СТРУКТУРЫ ПОЛИПОВ ТОЛСТОЙ КИШКИ | 2007 |
|
RU2354280C1 |
| СПОСОБ ИНТРАОПЕРАЦИОННОЙ КОЛОНОСКОПИИ | 2024 |
|
RU2841152C1 |
| СПОСОБ ЗАБОРА БИОЛОГИЧЕСКОЙ ЖИДКОСТИ ИЗ ТОНКОЙ КИШКИ ЧЕРЕЗ КАНАЛ ЭНДОСКОПА | 2020 |
|
RU2738007C1 |
| Способ эндоскопической диссекции эпителиальных образований пищеварительного тракта | 2022 |
|
RU2790240C1 |
| СПОСОБ ЭНДОСКОПИЧЕСКОЙ ДЕКОМПРЕССИИ ТОЛСТОЙ КИШКИ ПРИ ОБТУРАЦИОННОЙ ТОЛСТОКИШЕЧНОЙ НЕПРОХОДИМОСТИ | 2010 |
|
RU2447842C1 |
| СПОСОБ ЭНДОСКОПИЧЕСКОЙ ПОДСЛИЗИСТОЙ ДИССЕКЦИИ КОЛОРЕКТАЛЬНЫХ ОБРАЗОВАНИЙ | 2020 |
|
RU2756489C1 |
| Гибридный лапаро-эндоскопический способ удаления новообразований ободочной кишки | 2023 |
|
RU2807566C1 |
| СПОСОБ ПАНХРОМОЭНДОСКОПИИ СЛИЗИСТОЙ ОБОЛОЧКИ ТОЛСТОЙ КИШКИ | 2010 |
|
RU2427311C1 |
Изобретение относится к медицине, а именно к эндоскопии, и может быть использовано при проведении колоноскопии. Для этого в процессе введения эндоскопа положение дистального конца аппарата определяют аускультативно через переднюю брюшную стенку на уровне топографии исследуемых полостей путем выслушивания шумов, которые возникают в кишечнике в процессе работы аппарата. С этой целью используют диагностические приборы, способные улавливать данные звуки. По местоположению локализации шумов определяют положение дистального конца аппарата. Способ обеспечивает точное определение положения эндоскопа при проведении колоноскопии. 2 ил., 4 пр.
Способ определения положения эндоскопа при проведении колоноскопии, включающий проведение эндоскопа по просвету кишки, отличающийся тем, что в процессе введения эндоскопа положение дистального конца аппарата определяют аускультативно, для этого через переднюю брюшную стенку на уровне топографии исследуемых полостей проводят выслушивание шумов, которые возникают в кишечнике в процессе работы аппарата, используя диагностические приборы, способные улавливать данные звуки, и по местоположению локализации шумов определяют положение дистального конца аппарата.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сочлененный паровоз | 1925 |
|
SU14866A1 |
| H | |||
| KASHIDA | |||
| Техника выполнения колоноскопии | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SEUNG-HWA LEE et al | |||
| Colonoscopy procedural skills and training for new beginners | |||
| World J Gastroenterol | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

