Изобретение относится к области магнитолевитационной транспортной техники. Система предназначена для высокоскоростного перемещения грузов по слабо освоенным территориям на большие расстояния.
Известна грузовая конвейерная система для перемещения контейнеров с использованием магнитной левитации (Conceptual Design Study For The Electric Cargo COnveyor (ECCO) System.
http://www.portoflosangeles.org/DOC/REPORT_ECCO_102706.pdf), содержащая путевую структуру, систему энергоснабжения, транспортную платформу, систему контроля и управления. Каждая секция путевой структуры содержит магнитопровод статора с фазными обмотками линейного синхронного двигателя, которые получают питание от стационарной системы энергоснабжения. Транспортная платформа снабжена узлом магнитной системы, состоящей из двух массивов постоянных магнитов. Первый массив установлен параллельно магнитопроводу статора линейного двигателя, второй массив охватывает трековые сборки системы левитации, установленные на путевой структуре.
Недостатком системы является то, что режим бесконтактного перемещения транспортной платформы возникает только при больших скоростях движения.
Известна транспортная система (Патент RU 2643900 С1, МПК6 В61В 13/08; B60L 13/04; B60L 13/10; B60V 3/04), содержащая транспортную платформу, установленную на двух несущих тележках, оснащенных магнитными модулями. Каждый магнитный модуль состоит из бортового магнитного полюса и путевого магнитного полюса левитации. Платформа снабжена тяговым линейным синхронным двигателем со сверхпроводниковой обмоткой возбуждения, статор которого уложен вдоль активной путевой структуры.
Недостатком системы является то, что синхронный линейный двигатель, используемый для приведения в движение транспортной платформы, имеют сложные распределенные обмотки, установленные на всем протяжении путепровода. Для обеспечения энергоснабжения обмоток требуется сооружение подстанций вдоль всего путепровода, что снижает эксплуатационные характеристики транспортной системы.
Наиболее близкой по технической сущности к заявляемому техническому решению, принятому за прототип, является транспортная система с линейным реактивным индукторным приводом для тяги и левитации (Заявка на патент US 2004/0089190 А1, МПК7 B60L 13/04), содержащая путевую структуру, транспортную платформу, выполненную с возможностью приведения в движение вдоль путевой структуры, систему привода, включающую зубчатый статор линейного двигателя с обмотками, преобразовательное устройство для создания токов в обмотках, зубчатый ротор, установленный на путевой структуре, при этом зубцы ротора отделены от зубцов статора воздушным зазором и находятся в электромагнитном взаимодействии друг с другом, создавая тяговую силу, направленную вдоль путевой структуры в сочетании с подъемной силой, направленной перпендикулярно тяговой силе. Кроме того, система привода содержит передаточное устройство, связывающее статоры линейных двигателей и транспортную платформу, обеспечивая передачу указанных сил грузу относительно путевой структуры. На передаточном устройстве установлены левитационные магниты, обеспечивающие дополнительную подъемную силу, и направляющие магниты, обеспечивающие боковую стабилизацию транспортной платформы относительно путевой структуры. Конфигурация передаточного устройства обеспечивает бесконтактное перемещение транспортной платформы вдоль путевой структуры.
Недостатком транспортной системы является низкая эксплуатационная надежность при высокоскоростном перемещении контейнеров на большие расстояния в условиях слабо освоенных территорий. Система ориентирована на конвейерную транспортировку грузов на небольшие расстояния в условиях хорошо освоенных территорий, поэтому в этих условиях эксплуатационная надежность транспортных систем обеспечивается, в том числе, за счет наличия технической помощи на линии. При эксплуатации транспортной системы в условиях слабо освоенных территорий техническая помощь на линии практически отсутствует.
Задачей, решаемой изобретением, является повышение эксплуатационной надежности транспортной системы для высокоскоростного перемещения контейнеров на большие расстояния в условиях слабо освоенных территорий.
Техническим результатом является увеличение пропускной способности транспортной системы.
Поставленная задача решается и технический результат достигается тем, что транспортная система для перемещения контейнеров, содержит путевую структуру, транспортную платформу, выполненную с возможностью приведения в движение вдоль путевой структуры, систему привода, включающую: статор линейного двигателя с обмотками, преобразовательное устройство для создания токов в обмотках, ротор, установленный на путевой структуре и отделенный от статора воздушным зазором, передаточное устройство, связывающее статор линейного двигателя и транспортную платформу.
В отличие от прототипа в систему введены дополнительные транспортные платформы, каждая из которых снабжена сцепными устройствами, соединяющими их в сцепной состав, а головные платформы оснащены автономными энергетическими установками, генерирующими электрическую энергию для питания силовых цепей системы линейного привода, кроме того, каждая транспортная платформа дополнительно оснащена электрохимическим накопителем энергии, зарядно-разрядным устройством, связывающим электрохимический накопитель энергии с силовыми цепями системы линейного привода, а передаточное устройство состоит из съемных модулей, каждый из которых образован механически связанными друг с другом кронштейнами, один конец которых шарнирно связан с транспортной платформой, а на втором конце установлен, по меньшей мере, один статор линейного двигателя, при этом конфигурация кронштейнов обеспечивает взаимное расположение статора и ротора, при котором осуществляется электромагнитное взаимодействие друг с другом через воздушный зазор и создается тяговое, подъемное и боковое стабилизирующее усилие, обеспечивающие бесконтактное перемещение транспортной платформы вдоль путевой структуры.
Сущность предложенного технического решения поясняется чертежами.
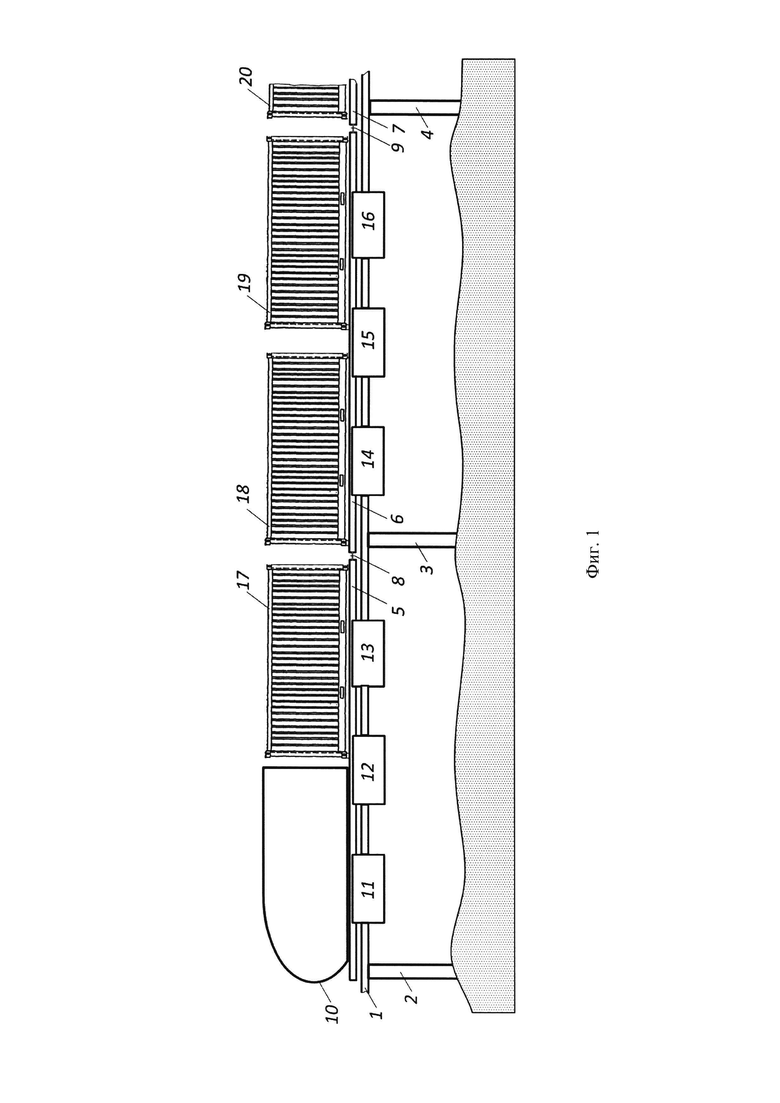
На фигуре 1 показан фрагмент общего вида грузовой магнитолевитационной транспортной системы. На фигуре 2 показано расположение устройств на транспортной платформе. На фигуре 3 показана транспортная платформа в разрезе. На фигуре 4 приведена функциональная схема силовых электрических цепей транспортной платформы. На фигуре 5 приведена функциональная схема преобразовательного устройства. На фигуре 6 показана конструкция передаточного устройства. На фигуре 7 показано соединение передаточного устройства с продольной балкой транспортной платформы.
На фигуре 1 показан фрагмент общего вида транспортной системы для перемещения контейнеров. Система содержит: путевую структуру, образованную путевым полотном 1, установленным на опорах 2-4; транспортные платформы 5-7, снабженные сцепными устройствами 8, 9, соединяющими платформы в сцепной состав; автономную энергетическую установку 10, установленную на головной платформе 5; передаточные устройства 11-16, соединенные с бортом каждой транспортной платформы; контейнеры 17-20, установленные на транспортных платформах.
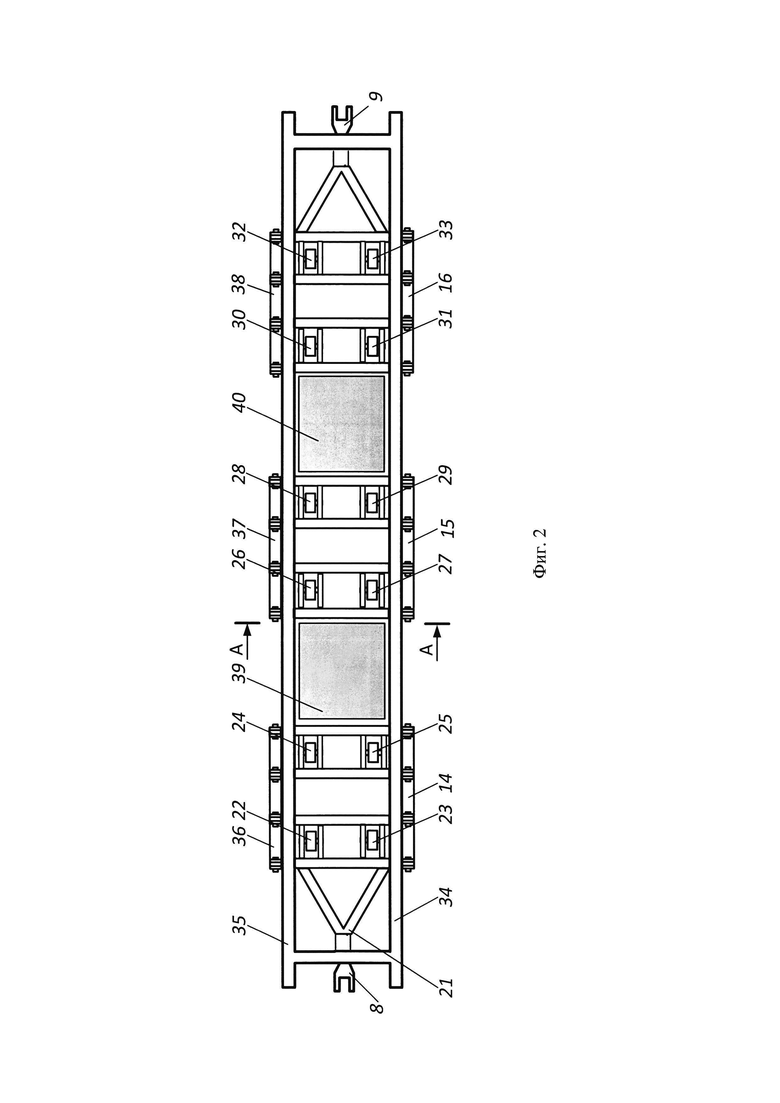
На фигуре 2 показано расположение устройств на транспортной платформе. Транспортная платформа (см. поз. 6, фигура 1) содержит раму 21, оснащенную сцепными устройствами 8, 9 и колесными блоками 22-33 для транспортировки платформы вдоль путевого полотна. На боковой балке 34 рамы установлены передаточные устройства 14-16. На боковой балке 35 рамы установлены передаточные устройства 36-38. В объеме рамы платформы между колесными блоками расположены электрохимический накопитель энергии 39 и зарядно-разрядное устройство 40.
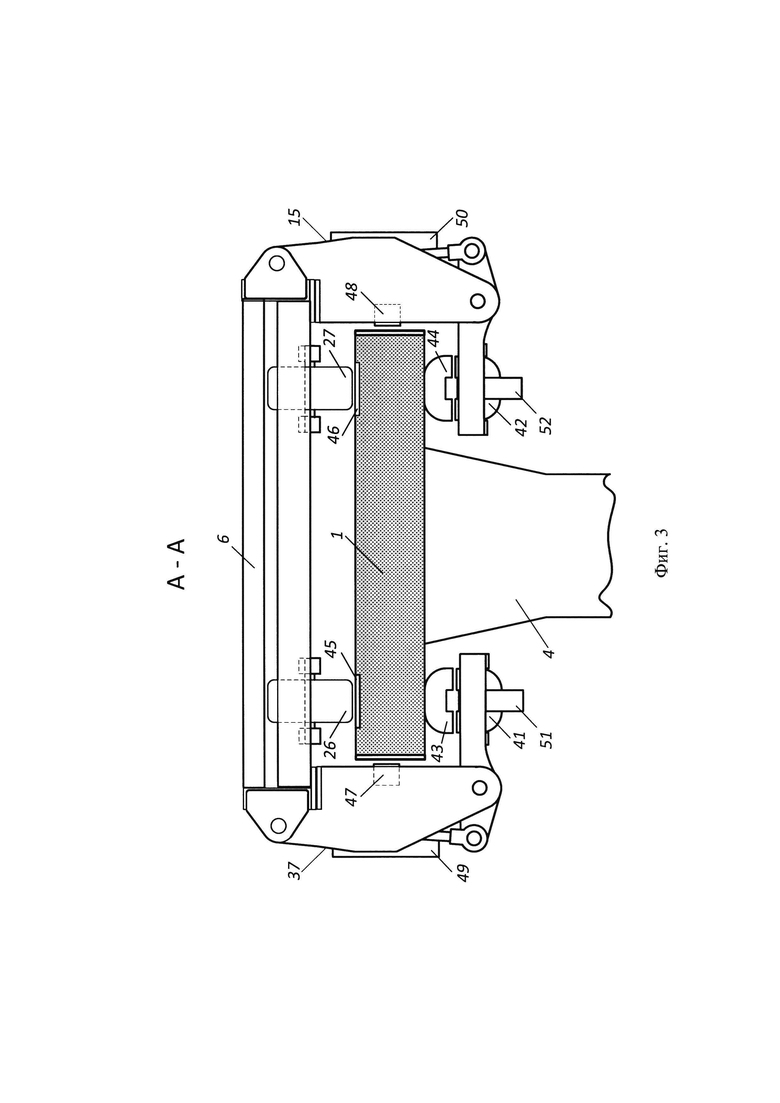
На фигуре 3 показана транспортная платформа в разрезе (см. фигура 2, разрез А-А). На фигуре показаны: путевое полотно 1, опирающееся на опору 4; транспортная платформа 6, колесные блоки 26, 27; передаточные устройства 15, 37, связывающие статоры линейных двигателей 41, 42 и транспортную платформу 6; элементы ротора 43, 44, установленные на нижней поверхности путевого полотна 1; стальные пластины 45, 46, вмонтированные в поверхность путевого полотна, образующие посадочную поверхность для колесных блоков; роликовые катки 47, 48, ограничивающие боковое смещение платформы относительно путевого полотна; преобразовательные устройства 49, 50, питающие обмотки 51, 52 статоров 41, 42 линейных двигателей.
Принцип работы устройства заключается в следующем. При подаче импульсов тока в обмотки статоров 51, 52 линейных двигателей от преобразовательных устройств 49, 50 возникает силовое взаимодействие между статорами 41, 42 линейных двигателей и элементами ротора 43, 44 через регулируемый по величине воздушный зазор. Создается тяговое, подъемное и боковое стабилизирующее усилие. Указанные усилия передаются через передаточные устройства 15, 37 к транспортной платформе 6. Воздушный зазор между статорами линейных двигателей и элементами ротора регулируется таким образом, чтобы отсутствовал контакт между колесными блоками 26, 27 и стальными пластинами 45, 46, образующими посадочную поверхность на путевом полотне 1. Это обеспечивает бесконтактное перемещение транспортной платформы вдоль путевой структуры.
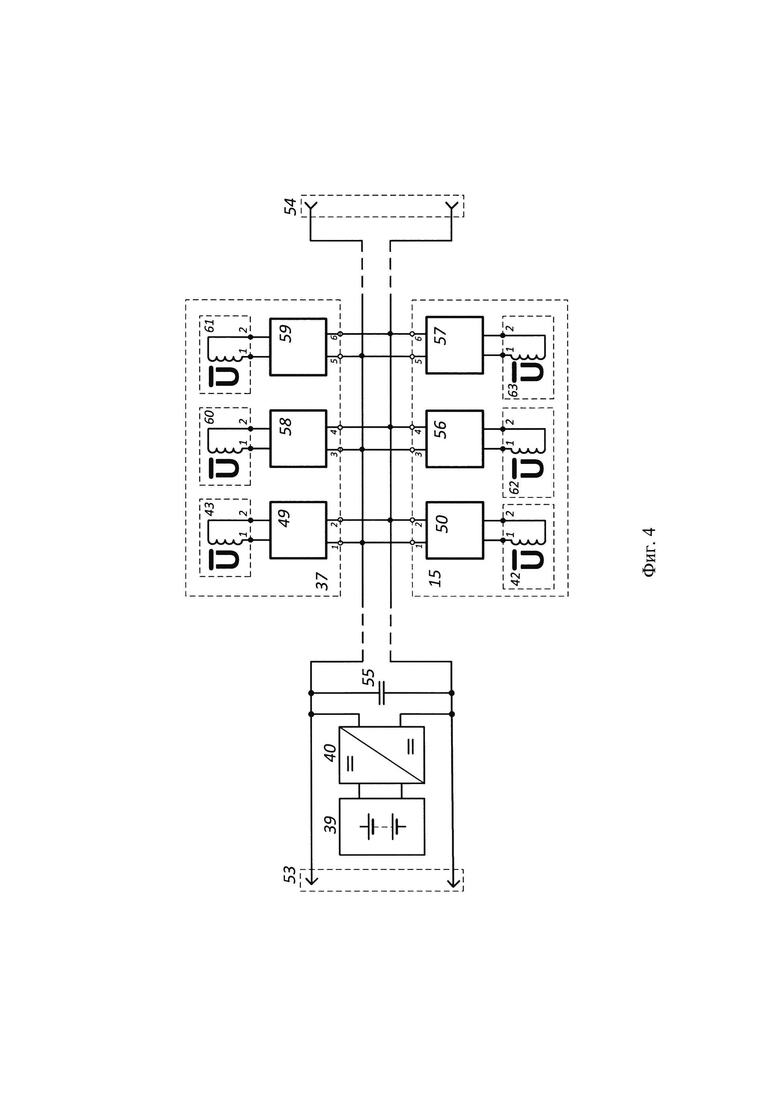
На фигуре 4 приведена функциональная схема силовых электрических цепей транспортной платформы 6. Схема содержит межсекционные силовые разъемы 53, 54, электрохимический накопитель энергии 39, зарядно-разрядное устройство 40, конденсатор фильтра 55. Кроме того, на схеме показаны преобразовательные устройства 50, 56, 57 и статоры линейных двигателей 42, 62, 63, интегрированные в конструкцию передаточного устройства 15, а так же преобразовательные устройства 49, 58, 59, статоры линейных двигателей 43, 60, 61 интегрированные в конструкцию передаточного устройства 37.
Функционирование схемы заключается в следующем. Питающее напряжение, генерируемое энергетической установки 10, расположенной на головной платформе 5 (см. фигура 1), подается на силовые электрические цепи транспортной платформы 6 через силовой разъем 53. Накопитель энергии 39 через зарядно-разрядное устройство 40 может накапливать энергию, генерируемую автономной энергетической установкой или системой привода в режиме рекуперативного торможения, а также осуществлять поставку энергии в силовую цепь совместно с энергетической установкой в зависимости от режима работы транспортной системы и текущей энергетической ситуации. В режиме тяги преобразовательные устройства преобразуют постоянное напряжение силовой цепи в однополярное пульсирующее напряжение, регулируемое по частоте для питания обмоток статоров. В режиме рекуперативного торможения преобразовательные устройства обеспечивают возбуждение магнитных систем статоров и преобразование пульсирующего напряжения, возникающего на их обмотках, в постоянное напряжение, поставляемое в силовую цепь. Конденсатор 55 сглаживает пульсации напряжения. Избыток энергии из силовых цепей поглощается накопителем энергии 39 через зарядно-разрядное устройство 40. Таким образом, кинетическая энергия, накопленная транспортной системой, преобразуется в электрическую энергию и запасается в накопителе энергии для последующего использования.
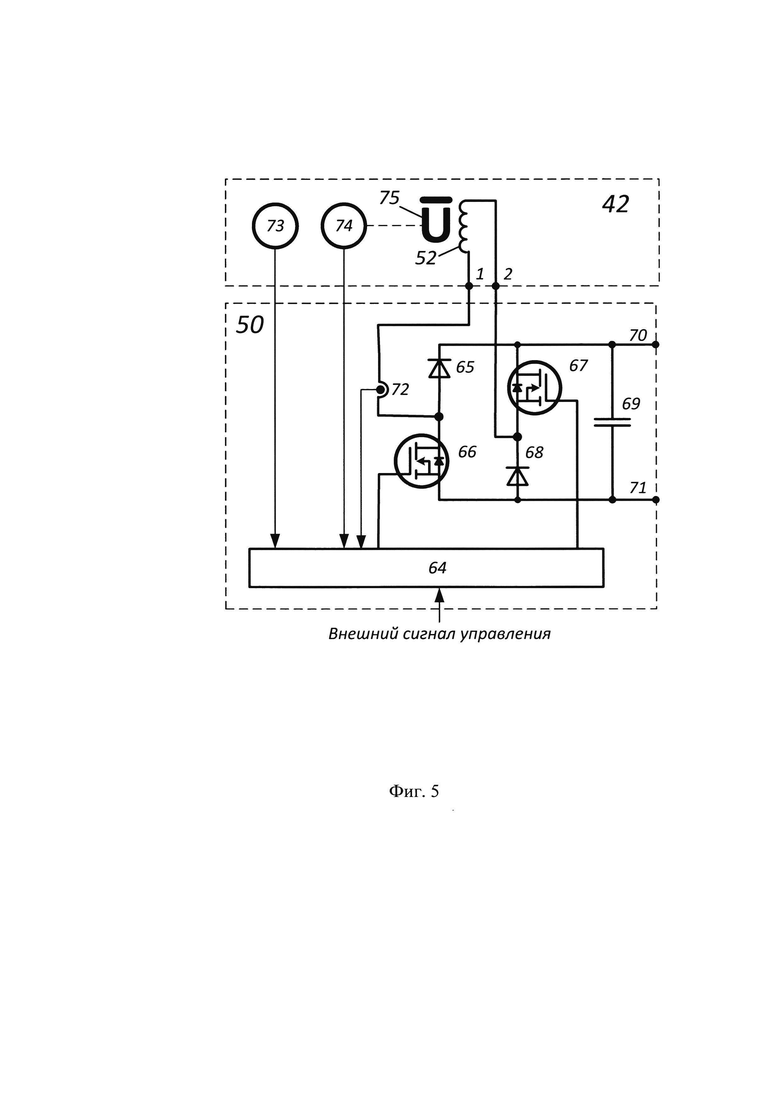
На фигуре 5 приведена функциональная схема преобразовательного устройства 50. Преобразовательное устройство 50 содержит блок управления 64, электронный коммутатор, образованный цепями из последовательно включенных силовых диодов и ключей 65 и 66, 68 и 67, соединенных с выводами конденсатора 69, и разъемными соединениями 70, 71, на которые подается питающее напряжение от силовых цепей транспортной платформы. Точка соединения силового ключа 66 и диода 65 соединена с первым выводом обмотки 52 статора линейного двигателя 42 через датчик тока 72, а точка соединения силового ключа 67 и диода 68 соединена со вторым выводом обмотки 52. Датчик положения ротора 73 и датчик воздушного зазора 74 интегрированы в конструкцию статора 42 линейного двигателя и связаны с магнитопроводом 75 статора 42 линейного двигателя.
Устройство работает следующим образом. При поступлении внешнего сигнала управления на блок управления 64 запускается управляющая программа, формирующая сигналы для управления силовыми ключами 66, 67. При этом осуществляется формирование импульсов однополярного тока в обмотке статора 52.
Значение тока в обмотке 52, определяемое датчиком тока 72, регулируется таким образом, чтобы обеспечивалось поддержание заданного значения воздушного зазора, определяемого датчиком воздушного зазора 74. Линейное бесконтактное перемещение транспортной платформы вдоль путевой структуры обеспечивается синхронизацией импульсов тока в обмотке 52 с сигналами датчика положения ротора 73.
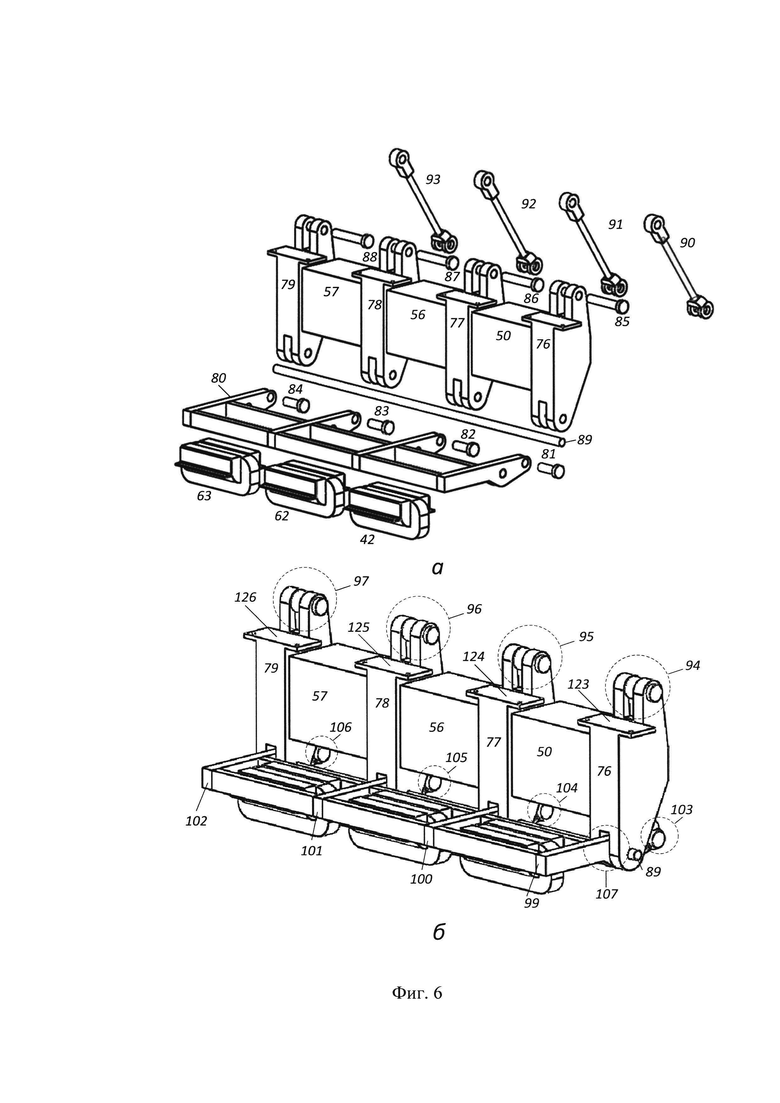
Преобразовательное устройство может быть интегрировано в конструкцию передаточного устройства, как показано на фигуре 6.
На фигуре 6а показан разнесенный вид передаточного устройства 15 (см. фигуру 2). Конструктивно передаточное устройство выполнено в виде съемного модуля, содержащего кронштейны 76-79, концы которых выполнены в виде вилок с соосными отверстиями, преобразовательные устройства 50, 56, 57, раму 80, статоры линейного двигателя 42, 62, 63, пальцы 81-88, ось 89, тяги 90 - 93.
На фигуре 66 показано передаточное устройство в сборе. Устройство состоит из кронштейнов 76-79, связанных друг с другом корпусами преобразовательных устройств 50, 56, 57. Верхние вилки кронштейнов образуют шарнирные соединения 94-97 с первыми концами тяг. Тяги проходят через цилиндрические полости, находящиеся в корпусах кронштейнов (визуально доступно изображение цилиндрической полости поз. 98 на фигуре 7а) и вторыми концами образуют шарнирные соединения 103-106 с поперечными балками 99-102 рамы 80. Нижние вилки кронштейнов образуют вторые шарнирные соединения 107-110 с поперечными балками рамы в их средней части с помощью оси 89 (на фигуре 66 визуально доступно только изображение поз. 107). Таким образом, каждая поперечная балка рамы образует с соответствующим кронштейном механизм в виде двуплечего рычага, на одном плече которого закреплены статоры линейных двигателей 42, 62, 63, а вторые плечи рычага шарнирно соединены со вторыми концами тяг.
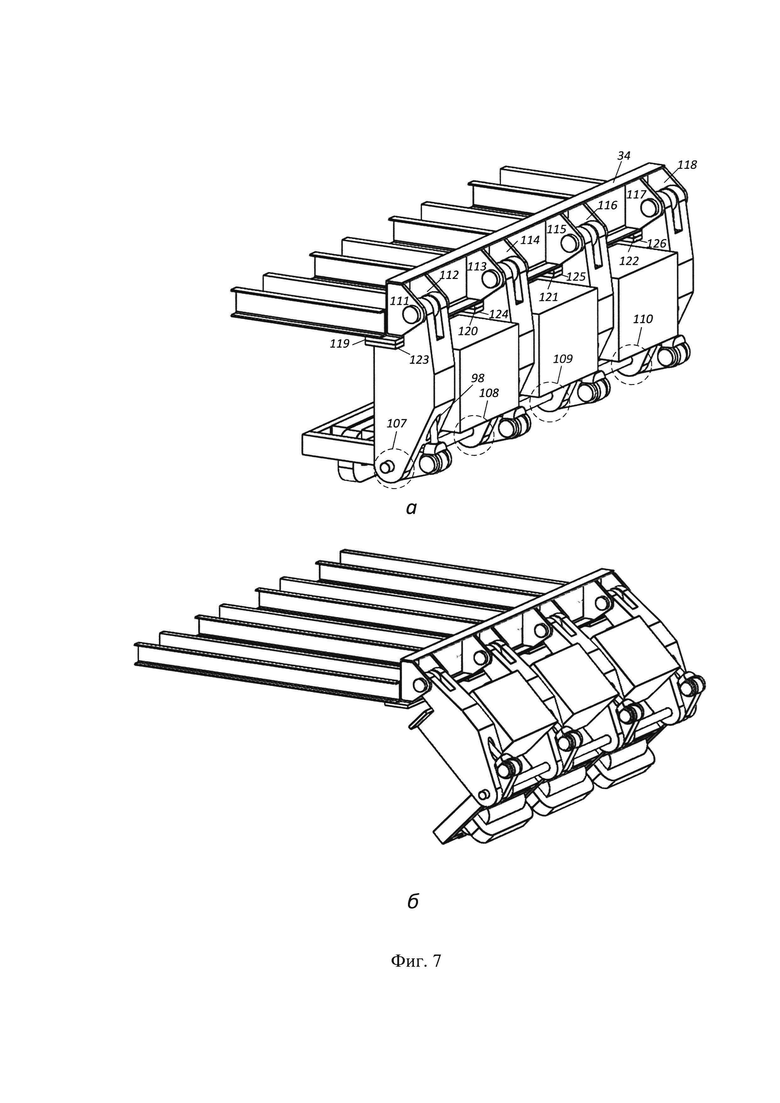
На фигуре 7а показано соединение передаточного устройства с продольной балкой транспортной платформы. Продольная балка транспортной платформы 34 оснащена проушинами 111-118 с соосными отверстиями, и опорными планками 119-122. Аналогичными опорными планками 123-126 оснащены кронштейны передаточного устройства. Шарнирные соединения 94-97 (см. фигуру 66) установлены между проушинами 111-118 и соединены с ними пальцами 85 - 86 (см фигуру 6а). При этом опорные планки транспортной платформы 119-122 и опорные планки 123-126 кронштейнов передаточного устройства примыкают друг к другу и скрепляются между собой, фиксируя модуль передаточного устройства в рабочем положении. Если опорные планки не скреплены между собой, то становится возможным поворотное движение модуля передаточного устройства относительно оси шарнирных соединений, как показано на фигуре 76. Такая конструкция повышает ремонтопригодность системы за счет обеспечения доступа к основным узлам устройства и быстрой замены съемного модуля передаточного устройства.
Таким образом, повышение эксплуатационной надежности транспортной системы для высокоскоростного перемещения грузов на большие расстояния в условиях слабо освоенных территорий, по сравнению с прототипом, обеспечивается благодаря:
- введению дополнительных транспортных платформ, каждая из которых снабжена сцепными устройствами, соединяющими их в сцепной состав, и оснащению сцепного состава двумя автономными энергетическими установками повышается живучесть системы, так как при отказе одной из энергоустановок сцепной состав способен продолжать движение, используя энергию одной энергоустановки;
- оснащению каждой транспортной платформы электрохимическим накопителем энергии и зарядно-разрядным устройством повышается энергетическая эффективность транспортной системы, за счет накопления и повторного использования кинетической энергии, высвобождающейся при электрическом торможении сцепного состава, что экономит моторесурс энергетической установки и повышает вероятность безотказной работы;
- съемной конструкции модулей передаточного устройства повышается ремонтопригодность устройства за счет обеспечения доступа к основным узлам и возможности быстрой замены съемного модуля;
- упрощению системы по сравнению с прототипом, за счет исключения из устройства левитационных и направляющих магнитов, повышается вероятность безотказной работы системы.
Положительный эффект от использования предлагаемого технического решения проявляется в уменьшении времени доставки груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система | 2016 |
|
RU2643900C1 |
| МАГНИТОЛЕВИТАЦИОННЫЙ СТРЕЛОЧНЫЙ ПЕРЕВОД БЕЗ МЕХАНИЧЕСКИХ И ПОДВИЖНЫХ УЗЛОВ | 2019 |
|
RU2745747C2 |
| Накопитель кинетической энергии | 1988 |
|
SU1746098A1 |
| Магнитолевитационное транспортное средство | 2019 |
|
RU2724030C1 |
| Преобразователь тяговый локомотива | 2019 |
|
RU2732816C1 |
| РАЗГОННОЕ УСТРОЙСТВО ДЛЯ ВЗЛЕТА КОРАБЕЛЬНЫХ САМОЛЕТОВ | 2019 |
|
RU2712407C1 |
| Транспортное средство с гибридной силовой установкой | 2018 |
|
RU2701282C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2651787C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2651385C2 |
Изобретение относится к транспортным системам, а именно к грузовым транспортным системам для высокоскоростного перемещения грузов по слабо освоенным территориям на большие расстояния с использованием технологии магнитной левитации. Транспортная система содержит путевую структуру, транспортную платформу, систему привода, включающую статор линейного двигателя, преобразовательное устройство, ротор, установленный на путевой структуре и отделенный от статора воздушным зазором, передаточное устройство, связывающее статор линейного двигателя и транспортную платформу, оснащена дополнительными транспортными платформами, соединенными в сцепной состав. Головные платформы состава оснащены автономными энергетическими установками, а каждая транспортная платформа оборудована электрохимическим накопителем энергии и зарядно-разрядным устройством. Передаточное устройство состоит из съемных модулей, конфигурация которых обеспечивает электромагнитное взаимодействие статора и ротора через воздушный зазор и бесконтактное перемещение транспортной платформы вдоль путевой структуры. В результате повышается эксплуатационная надежность транспортной системы, увеличивается ее пропускная способность, уменьшается время доставки груза. 7 ил.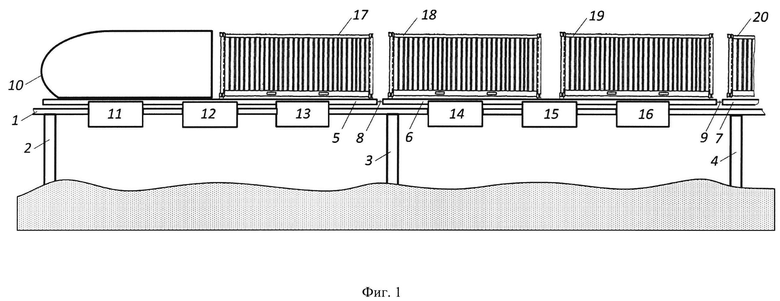
Грузовая магнитолевитационная транспортная система, содержащая путевую структуру, транспортную платформу, выполненную с возможностью приведения в движение вдоль путевой структуры, систему привода, включающую статор линейного двигателя с обмотками, преобразовательное устройство для создания токов в обмотках, ротор, установленный на путевой структуре и отделенный от статора воздушным зазором, передаточное устройство, связывающее статор линейного двигателя и транспортную платформу, отличающаяся тем, что в систему введены дополнительные транспортные платформы, каждая из которых снабжена сцепными устройствами, соединяющими их в сцепной состав, а головные платформы оснащены автономными энергетическими установками, генерирующими электрическую энергию для питания силовых цепей системы линейного привода, кроме того, каждая транспортная платформа дополнительно оснащена электрохимическим накопителем энергии, зарядно-разрядным устройством, связывающим электрохимический накопитель энергии с силовыми цепями системы линейного привода, а передаточное устройство состоит из съемных модулей, каждый из которых образован механически связанными друг с другом кронштейнами, один конец которых шарнирно связан с транспортной платформой, а на втором конце установлен по меньшей мере один статор линейного двигателя, при этом конфигурация кронштейнов обеспечивает взаимное расположение статора и ротора, при котором осуществляется электромагнитное взаимодействие друг с другом через воздушный зазор и создаются тяговое, подъемное и боковое стабилизирующее усилия, обеспечивающие бесконтактное перемещение транспортной платформы вдоль путевой структуры.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОЙ ЛЕВИТАЦИИ | 1997 |
|
RU2131165C1 |
| УСТРОЙСТВО, СИСТЕМЫ И СПОСОБЫ ДЛЯ ПОДНЯТИЯ И ПЕРЕМЕЩЕНИЯ ПРЕДМЕТОВ | 2002 |
|
RU2288852C2 |

