Изобретение относится к области магнитолевитационной транспортной технологии, а именно к конструкции устройства стрелочного перевода без механических и подвижных узлов. Стрелочный перевод место разветвления транспортного пути на две разных линии или соединение двух линий в одну, без механических и подвижных узлов, содержит входной участок, разделитель и участки разветвления, когда работает на соединение в одну линию, то стрелочный перевод содержит разветвления, соединитель и выход в одну линию.
В результате обеспечивается магнитная левитация, боковая стабилизация и управление поворотами на стрелочном переводе без механических и подвижных узлов в любой плоскости координат, с электроэнергией на пути и без электроэнергии на пути, когда подвижной состав двигается по инерции.
Известно изобретение, заявка №2016121270, публикация RU 2651385 С2, авторы Антонов Ю.Ф. и Зайцев А.А. Изобретение относится к области магнитолевитационного транспорта, а именно к конструкции стрелочного перевода с пути на путь транспортного средства на основе магнитной левитации. Стрелочный перевод магнитолевитационных транспортных средств, включающий прямые и ответвленные путевые треки левитации и обмотки статоров тяговых линейных синхронных двигателей, отличающийся тем, что он снабжен маневровыми линейными синхронными двигателями на ответвленных путевых треках левитации, трехфазные обмотки которых размещены в пазах, выполненных в ответвленных путевых треках левитации, при этом в прямых путевых треках левитации и в обмотках статоров тяговых линейных синхронных двигателей выполнены разрывы. Задачей изобретения является создание стрелочного перевода магнитолевитационных транспортных средств упрощенной конструкции и многопрофильного назначения, надежного и эффективного в эксплуатации, не прерывающего движение транспортного средства в режиме левитации на стрелочном переводе.
Недостатком известного устройства является его ненадежность, нет боковой поддержки на стрелочном переводе, нет ни боковой, ни верхней системы притяжения подвижного состава к транспортному пути. У этого изобретения на вираже нет боковой части, в которую упирается вся сила инерции подвижного состава, поэтому подвижной состав лишившись боковой поддержки с одной стороны, поперечной стабилизации с обеих сторон, состав наклониться, нарушиться положение статора относительно ротора, состав сойдет с пути, маневровый линейный тяговый двигатель не вытащит конструкцию на себя из-за нехватки или полной потери мощности.
Известно изобретение, заявка №2017108034, публикация RU 2651787 С1, авторы Зайцев А.А., Казначеев С.А., Зименкова Т.С., Краснов А.С. 1. Стрелочный перевод для магнитолевитационных транспортных средств, включающий прямые и ответвленные участки активной путевой структуры, отличающийся тем, что в месте разветвления активной путевой структуры ее участки выполнены в виде двух симметричных относительно оси поворота сегментов, выполненных с формой, сопрягающей прямой участок активной путевой структуры с соответствующими криволинейными ее участками и установленных с возможностью перемещения в вертикальной плоскости с помощью механизма перемещения сегментов активной путевой структуры, который обеспечивает подъем и нахождение одного из сегментов в рабочем состоянии в одной плоскости с неподвижными участками активной путевой структуры при одновременном опускании и выведении из рабочего в нерабочее состояние другого сегмента. 2. Стрелочный перевод по п. 1, отличающийся тем, что механизм перемещения сегментов активной путевой структуры выполнен в виде снабженного приводом трехзвенного рычажного механизма, два рычага которого прикреплены к неподвижно укрепленному шарниру, при этом сегменты активной путевой структуры укреплены на концах рычагов. 3. Стрелочный перевод по п. 1, отличающийся тем, что сегменты активной путевой структуры в нерабочем состоянии находятся от неподвижных элементов активной путевой структуры на расстоянии, достаточном для устранения влияния магнитного силового поля устройства динамической стабилизации магнитолевитационного транспортного средства.
Эта конструкция электромеханическая, при работе высокий износ, скорость переключения ограничена, без электричества не работает.
Изобретение направлено на устранение этих недостатков.
Техническое решение достигается посредством магнитолевитационного стрелочного перевода для магнитолевитационных трубопроводных транспортных средств, без механических узлов и деталей, содержащий в момент разветвления входящий участок пути, разделитель, участки разветвления, в момент соединения содержит эти же участки в обратном порядке, разветвленные участки, соединитель и однолинейный участок, статор линейного двигателя, взаимодействующий с ротором подвижного состава, систему горизонтальной магнитной левитации, систему поперечной стабилизации, отличающийся тем, что на боковых стенках транспортного пути, выполненного в форме разветвленной трубы, установлены вдоль электромагниты, расположенные снизу и сверху от середины диаметра транспортного трубопровода, взаимодействующие с постоянными магнитами подвижного состава разными полюсами, то есть, притягивающие магниты подвижного состава, вместо магнитов может применяться ферромагнитная пластина, входящий участок содержит электромагниты с обеих сторон трубопровода, разделитель содержит электромагниты справа и слева на разных расстояниях, участки разветвления содержат электромагниты с одной стороны.
Магнитолевитационный стрелочный перевод по п. 1, отличающийся тем, что на боковых стенках транспортного пути стрелочного перевода, выполненного в форме разветвленной трубы, установлены вдоль постоянные магниты, взаимодействующие с электромагнитом подвижного состава разноименными полюсами, расположенные снизу и сверху от середины диаметра трубы параллельно электромагнитам сверху них или снизу.
Сущность заявленного технического решения поясняется чертежами 1-6, где:
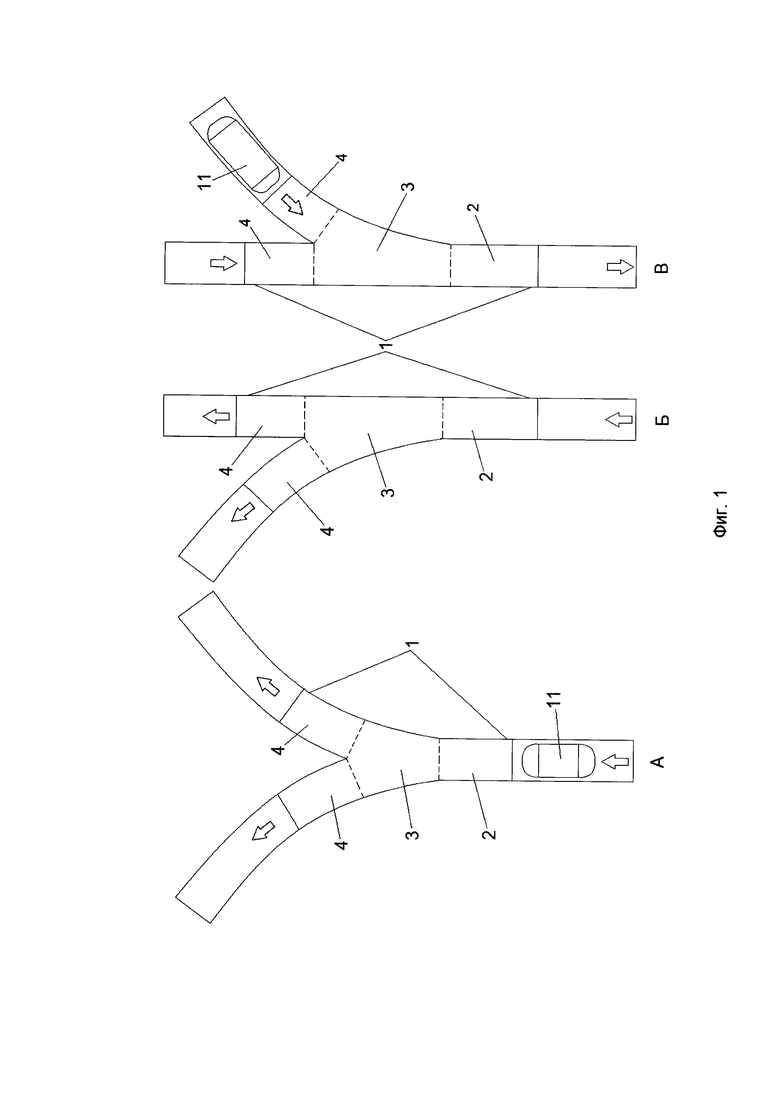
на фиг. 1 представлен вид сверху магнитолевитационного стрелочного перехода;
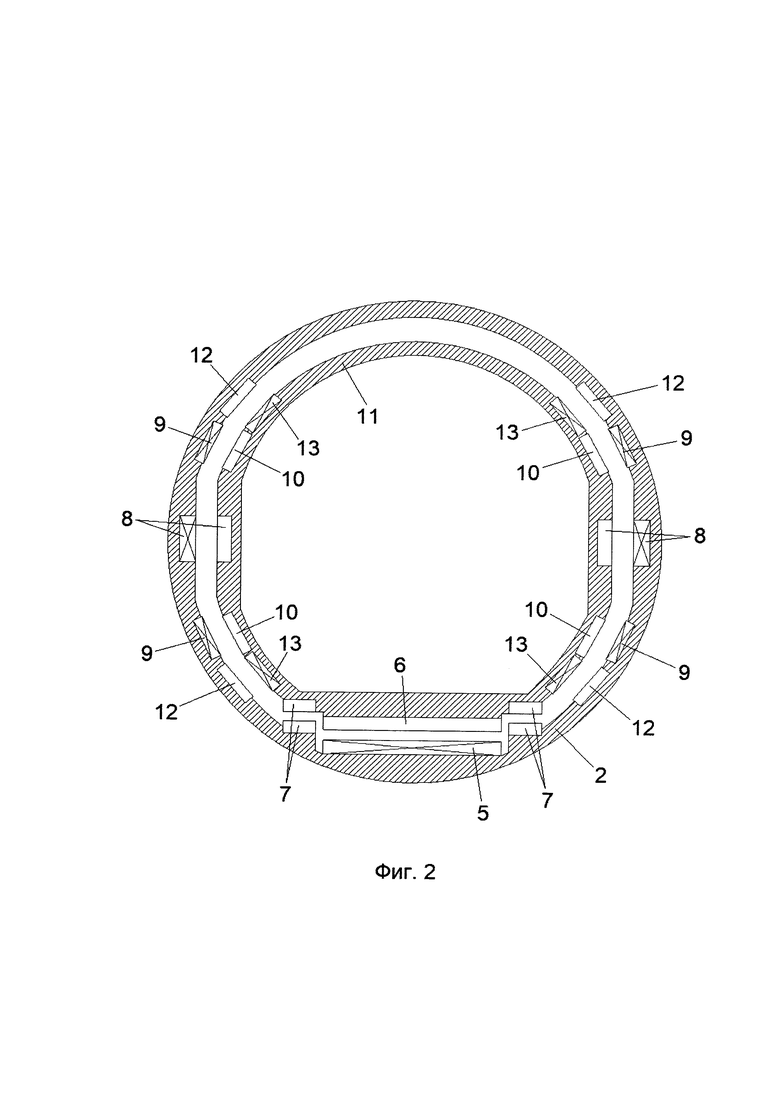
на фиг. 2 представлен поперечный разрез с подвижным составом на входном участке магнитолевитационного стрелочного перевода;
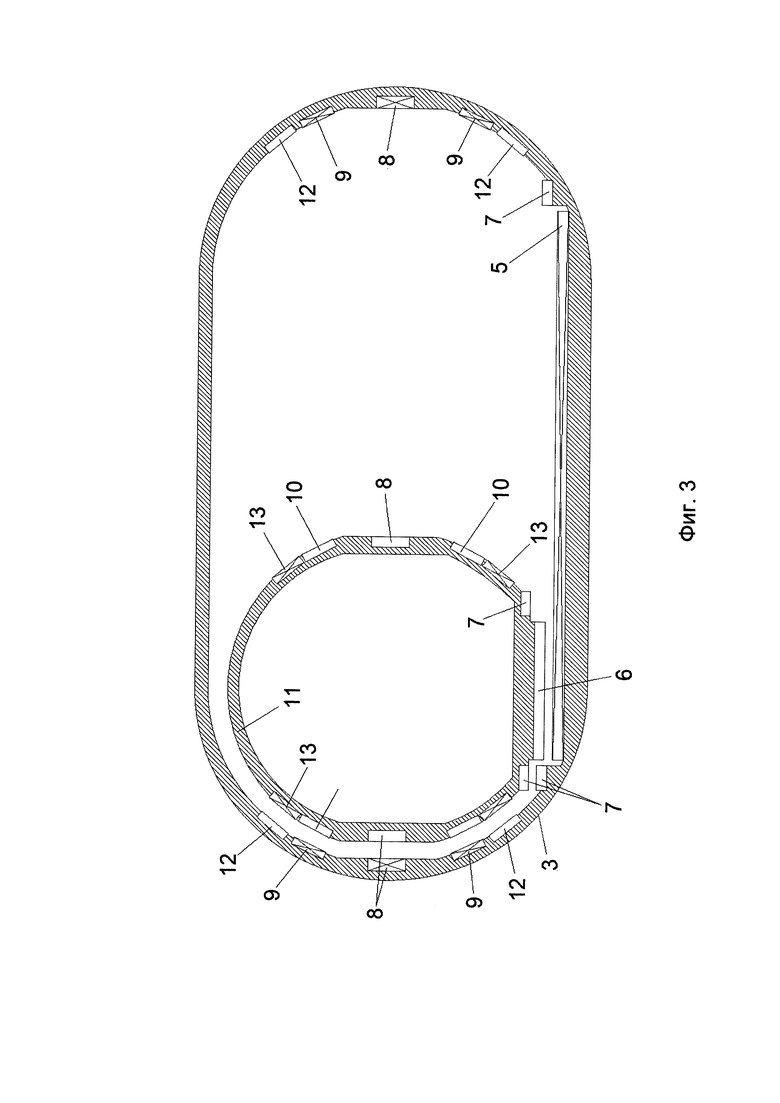
на фиг. 3 представлен поперечный разрез участка разделителя-соединителя с подвижным составом;
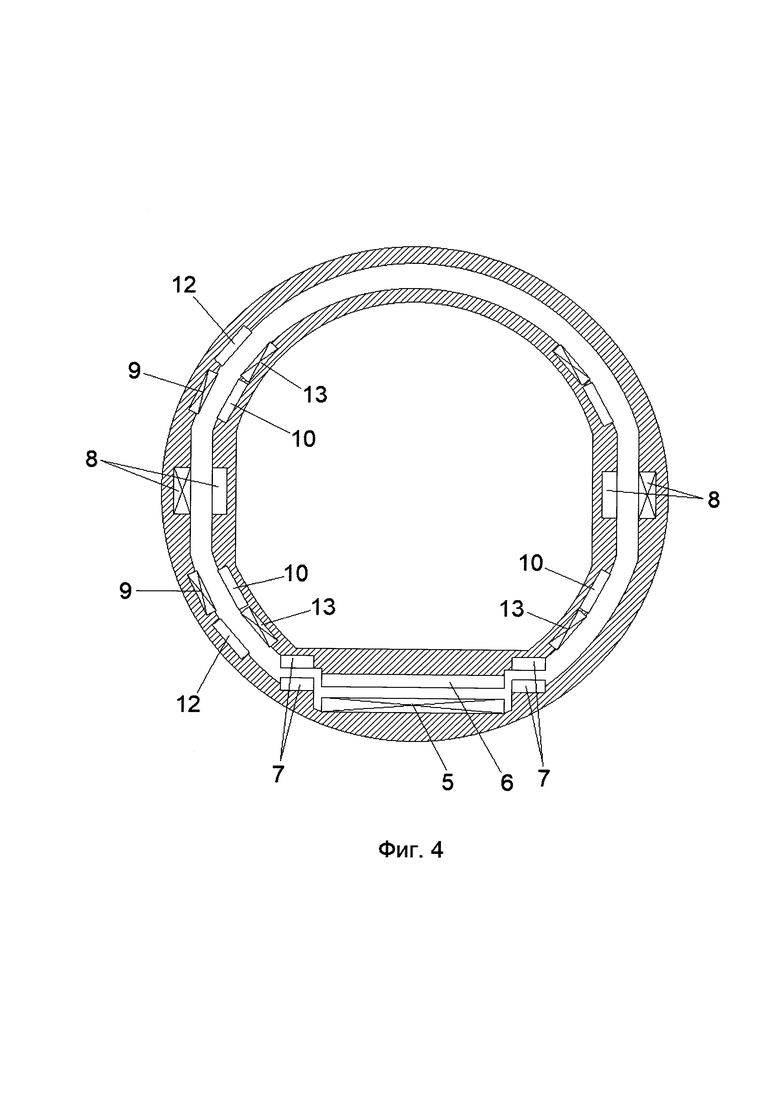
на фиг. 4 изображен поперечный разрез участка разветвления с подвижным составом, электромагниты и постоянные магниты находятся слева;
на фиг. 5 изображен поперечный разрез участка разветвления с подвижным составом, электромагниты и постоянные магниты находятся справа;
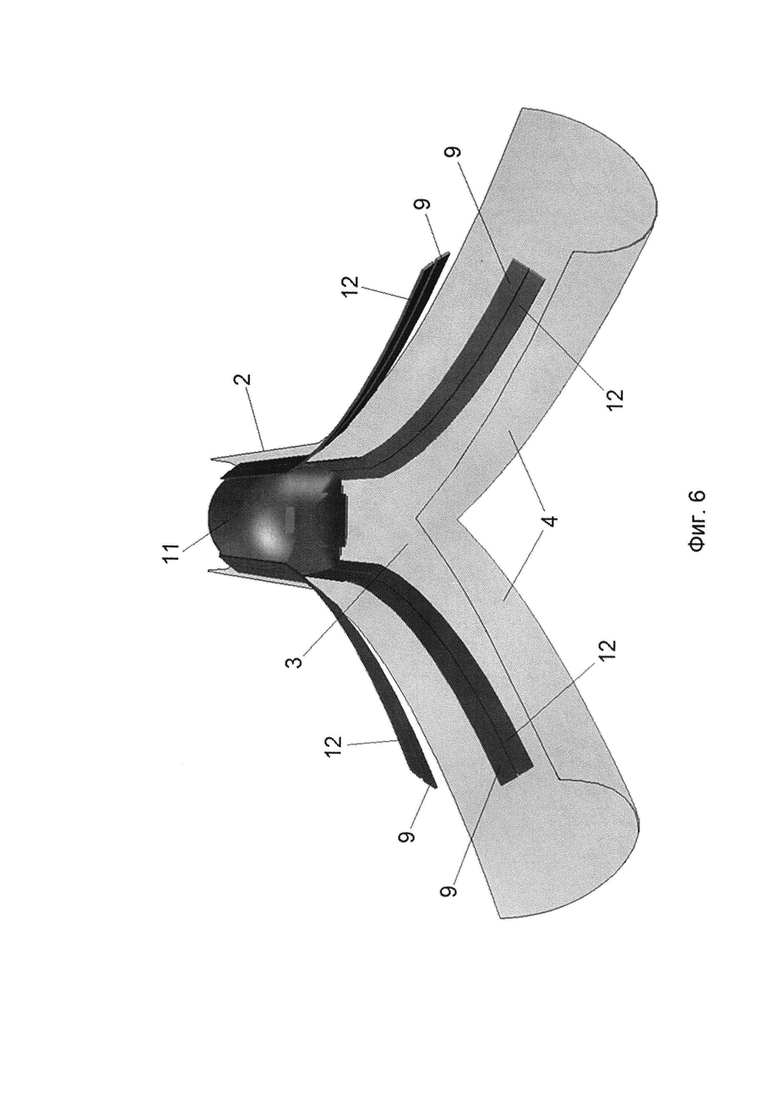
на фиг. 6 показано в изометрии расположение электромагнитов и постоянных магнитов в магнитолевитационном стрелочном переводе, верхняя часть трубопровода открыта для ясности.
Техническое решение достигается посредством магнитолевитационного стрелочного перевода 1 (фиг. 1А и Б) для магнитолевитационных трубопроводных транспортных средств, без механических узлов и деталей, содержащий в момент разветвления входящий участок 2 пути, разделитель 3, участки разветвления 4, в момент соединения содержит эти же участки в обратном порядке, разветвленные участки 4 (фиг. 1В) соединитель 3 и однолинейный участок 2, статор 5 (фиг. 2) линейного двигателя взаимодействующий с ротором 6 подвижного состава, систему 7 горизонтальной магнитной левитации, систему 8 поперечной стабилизации, отличающийся тем, что на боковых стенках транспортного пути, выполненного в форме разветвленной трубы, установлены вдоль электромагниты 9, расположенные снизу и сверху от середины диаметра транспортного трубопровода, взаимодействующие с постоянными магнитами 10 подвижного состава 11 разными полюсами, то есть, притягивающие магниты подвижного состава, вместо магнитов 9 может применяться ферромагнитная пластина, входящий участок 2 содержит электромагниты 9 с обеих сторон трубопровода, разделитель 3 (фиг. 3) содержит электромагниты 9 справа и слева на разных расстояниях, участки разветвления 4 (фиг. 4 и 5) содержат электромагниты 9 с одной стороны.
Магнитолевитационный стрелочный перевод по п. 1, отличающийся тем, что на боковых стенках транспортного пути стрелочного перевода 1 (фиг. 2), выполненного в форме разветвленной трубы, установлены вдоль постоянные магниты 12 взаимодействующие с электромагнитом 13 подвижного состава 11 разноименными полюсами, расположенные снизу и сверху от середины диаметра трубы параллельно электромагнитам 9 сверху них или снизу.
Работает магнитолевитационный стрелочный перевод 1 (фиг. 1) без механических и подвижных узлов, когда есть электрический ток на электромагнитах 9 (фиг. 2, 3, 4 и 5), следующим образом. Сначала подвижной состав 11 (фиг. 1 и фиг. 2) двигается по входящему участку 2, который содержит с самого начала электромагниты 9 (фиг. 2) вверху и внизу от середины диаметра. Когда подвижной состав 11 входит во входящий участок 2 стрелочного перевода 1, срабатывают электромагниты 9, слева или справа, которые взаимодействуют с постоянным магнитом 10 подвижного состава 11 притягивая подвижной состав на расстояние, чтобы постоянные магниты 10 не коснулись электромагнита 9, расстояние регулируется датчиком сближения (не отображен графически). Таким образом подвижной состав 11 в разделителе 3 (фиг. 3) левитирует в стрелочном переводе 1 на пяти точках, три точки по одной боковой стене обеспечивают электромагниты 9 и система 8 поперечной стабилизации, две точки в нижней части подвижного состава 11 обеспечивает система 7 горизонтальной левитации.
Для боковой стабилизации могут использоваться электромагниты на притяжение и на отталкивание, а также в место них можно использовать боковые ролики.
Когда подвижной состав въезжает во входной участок 2 (фиг. 1 и 6) электромагниты 9 (фиг. 2) включаются, например, справа, подвижной состав 11 притягивают в двух точках и от едет вправо. Когда подвижной состав 11 доезжает до участка 4 (фиг. 4 и 5) разветвления, то электромагниты 9 отключаются. В случае вхождения подвижного состава 11 в разветвитель 4 включаются электромагниты 9 на той стороне, где они есть, когда подвижной состав достигает однолинейного участка 2 (фиг. 2), электромагниты 9 отключаются.
В случае отключения электричества магнитолевитационный стрелочный перевод 1 без механических и подвижных узлов, работает следующим образом. Сначала подвижной состав 11 (фиг. 1) двигается по участку 2, который содержит с самого начала постоянные магниты 12 (фиг. 2) вверху и внизу от середины диаметра, взаимодействующие с электромагнитами 13 подвижного состава 11 разноименным полюсами (притяжение). Как только подвижной состав входит во входящий участок 2 стрелочного перевода 1, срабатывают бортовые электромагниты 13 подвижного состава 11, расположенные на боковой части вверху и внизу от середины, слева или справа. Электромагниты 11 срабатывают от бортового аккумулятора подвижного состава (не отображен графически) слева или справа и притягиваются к постоянным магнитам 12 стрелочного перевода 1. Датчик сближения контролирует чтобы электромагниты 13 и постоянные магниты 12 не касались друг друга. Таким же образом стрелочный перевод 1 (фиг. 1В) работает в другом направлении, только участки разветвления 4 (фиг. 4 и 5) выполняют функцию входа 2 и имеют электромагниты 9 и постоянные магниты 12 на одной стороне, участок 3 (фиг. 3) работает как соединитель, а участок 2 (фиг. 1 и 2) выполняет функцию разделителя 4. Для того чтобы подвижные составы 11 не входили в стрелочный перевод 1 одновременно для соединения в одну линию, требуется дополнительное управление стрелочным переводом посредством тягового линейного двигателя.
Магнитолевитационный стрелочный перевод без механических и подвижных узлов может применяться на всех магнитолевитационных видах транспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный магнитолевитационный стрелочный перевод | 2022 |
|
RU2793983C1 |
| ПОЧТОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НА МАГНИТНОМ ПОДВЕСЕ, УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ, УСТРОЙСТВО ЕЁ ПУНКТА ПОГРУЗКИ И РАЗГРУЗКИ, УСТРОЙСТВО ВЕРТИКАЛЬНОГО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ | 2018 |
|
RU2706615C2 |
| Вертикальный магнитолевитационный транспортный путь | 2019 |
|
RU2718858C1 |
| Трубопроводная магнитолевитационная грузовая транспортная система | 2021 |
|
RU2755369C1 |
| Устройство магнитной левитации на постоянных магнитах | 2020 |
|
RU2743104C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2651385C2 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2651787C1 |
| Магнитолевитационный транспортный трубопровод | 2019 |
|
RU2718859C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| Магнитолевитационное транспортное средство | 2019 |
|
RU2724030C1 |

Изобретение относится к области магнитолевитационного транспорта, в частности к конструкции стрелочного узла. Стрелочный перевод для трубопроводных транспортных средств содержит входящий участок пути, разделитель, участки разветвления, а также статор линейного двигателя. Статор взаимодействует с ротором подвижного состава. На боковых стенках путевой трубы снизу и сверху от середины трубопровода установлены электромагниты. Электромагниты взаимодействуют с магнитами подвижного состава разными полюсами. На входящем участке электромагниты установлены на обеих стеках, а на участках разветвления электромагниты установлены на одной из стенок. Повышается надежность стрелочного перевода. 1 з.п. ф-лы, 6 ил.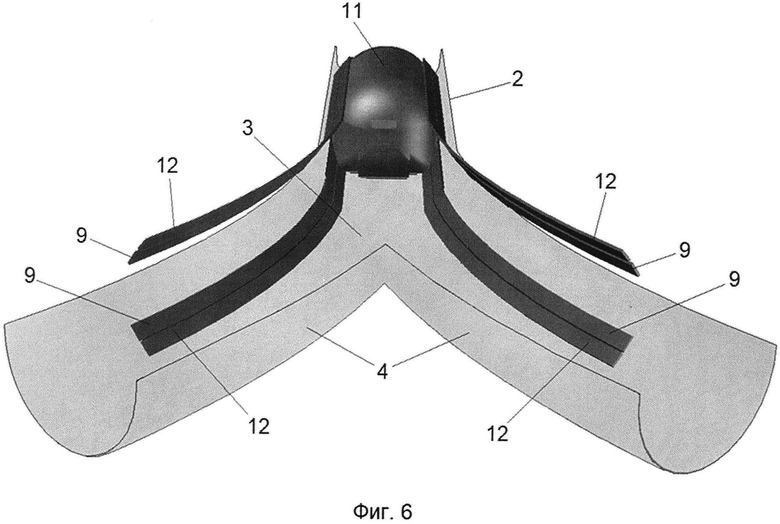
1. Магнитолевитационный стрелочный перевод для магнитолевитационных трубопроводных транспортных средств без механических узлов и деталей, содержащий в момент разветвления входящий участок пути, разделитель, участки разветвления, в момент соединения содержит эти же участки в обратном порядке, разветвленные участки, соединитель и однолинейный участок, статор линейного двигателя, взаимодействующий с ротором подвижного состава, систему горизонтальной магнитной левитации, систему поперечной стабилизации, отличающийся тем, что на боковых стенках транспортного пути, выполненного в форме разветвленной трубы, установлены вдоль электромагниты, расположенные снизу и сверху от середины диаметра транспортного трубопровода, взаимодействующие с постоянными магнитами подвижного состава разными полюсами, то есть притягивающие магниты подвижного состава, вместо магнитов может применяться ферромагнитная пластина, входящий участок содержит электромагниты с обеих сторон трубопровода, разделитель содержит электромагниты справа и слева на разных расстояниях, участки разветвления содержат электромагниты с одной стороны.
2. Магнитолевитационный стрелочный перевод по п. 1, отличающийся тем, что на боковых стенках транспортного пути стрелочного перевода, выполненного в форме разветвленной трубы, установлены вдоль постоянные магниты, взаимодействующие с электромагнитом подвижного состава разноименными полюсами, расположенные снизу и сверху от середины диаметра трубы параллельно электромагнитам сверху них или снизу.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2651385C2 |
| ТРАНСПОРТНАЯ УСТАНОВКА ЛЕВИТАЦИИ И ТЯГИ НА ОДНОФАЗНОМ ПЕРЕМЕННОМ ТОКЕ | 1990 |
|
RU2019447C1 |
| JP H8182116 A, 12.07.1996. | |||

