Изобретение относится к устройствам для измерения тяги и реактивного момента воздушного винта и может быть использовано при разработке стендов для отработки движителей для воздушной и водной среды. Стенд также может быть использовано для отработки перемешивающих устройств с использованием пропеллеров, турбин и т. п.
Известно устройство для определения характеристик воздушного винта воздушного робота CN204064694U, которое содержит датчик крутящего момента и датчик тяги S-типа. Нижний конец датчика тяги S-типа закреплен на основании испытательной установки, а верхний конец соединен жестко с основанием датчика крутящего момента. Двигатель с воздушным винтом установлен на основании при этом оси двигателя, датчика крутящего момента и датчика тяги S-типа установлены на одной линии.
Такая схема стенда достаточно проста, но каждый датчик испытывает помимо измеряемой нагрузки дополнительную нехарактерную нагрузку, которая может искажать результаты измерений или снижать точность измерении. Кроме того, работа двигателя с воздушным винтом вносит возмущения, связанное с неточностью изготовления, дисбалансом и т. п., что также фиксируется датчиками и накладывается на основные измеряемые параметры.
Стенд для испытания БПЛА CN106143949B содержит монтажное основание двигателя, которое установлено непосредственно на датчик момента вращения. Датчик момента вращения установлен на пару плит с линейными подшипниками. Подшипники установлены на линейные направляющие, которые установлены на основании. Датчик тяги расположен между основанием и нижней пары плит.
В данном устройстве датчик измерения тяги работает на чистое растяжение и может дать хорошие результаты измерения. Датчик момента вращения работает на комбинированную нагрузку растяжения и кручения, что может снизить точность результатов измерений, или должен быть применен более дорогой датчик измерения момента вращения, нечувствительный к усилию растяжения.
Известны устройства измерения тяги и реактивного момента воздушного винта, в которых производится предварительное разделение составляющих общей нагрузки от воздушного винта на чистое кручение и линейную нагрузку, которые затем измеряются специализированными датчиками.
Комбинированный механизм измерения крутящего момента винтового пропеллера CN104316290A содержит моторную базу, которая установлена на подвижную плиту через датчики веса. Подвижная плита установлена на линейных направляющих и соединена с датчиком тяги.
В данном устройстве датчик измерения тяги работает на растяжение в чистом виде и может дать хорошие результаты измерений. Датчик момента вращения работает на комбинированную нагрузку.
Известны устройства для измерения тяги и реактивного момента в которых разделяют нагрузки от воздушного винта на реактивный момент и тягу, каждый вид нагрузки поступает на свой датчик. Это позволяет упростить процесс измерения и повысить его точность.
Система испытания мощности микроминиатюрного самолета CN201974262U состоит из опоры двигателя, которая установлена на вал, соосный с осью вращения испытуемого двигателя с воздушным винтом. Опора двигателя имеет возможность качаться и перемещаться вдоль вала. Опора двигателя содержит рычаг, который давит на датчик усилия для измерения реактивного момента воздушного винта. Двигатель связан с корпусом устройства посредством датчика тяги.
Устройство для измерения тяги и крутящего момента малогабаритного двигателя с воздушным винтом CN202511930U содержит монтажную раму двигателя, которая установлена на направляющую, которая установлена на подшипник скольжения, и соединена с одной стороны с датчиком момента и датчиком тяги - с другой стороны.
Механизм разделения тягового усилия и момента кручения и испытательная платформа CN102288912B содержит плиту для установки двигателя с пропеллером, которая соединена с подвижной площадкой, установленной на четырёх линейных подшипниках на направляющие, установленные на верхней плите. Подвижная площадка связана с верхней плитой через датчик усилия. Верхняя плита установлена на валу на подшипниках качения, а конец вала соединен с датчиком момента вращения.
Устройство для измерения тягового усилия и крутящего момента воздушного винта CN205066989U содержит установленный на подшипники монтажный кронштейн, на котором на датчике тяги установлена монтажная плита для двигателя с воздушным винтом. На кронштейне установлен рычаг, который при вращении давит на датчик усилия для измерения реактивного момента воздушного винта.
Прототипом изобретения является устройство для измерения крутящего момента малого двигателя CN104483053A. Устройство содержит основание и установленный с возможностью перемещения относительно основания подвижный элемент с моторной базой, на который устанавливаются двигатель с воздушным винтом и рычагом, с которым сопряжен датчик усилия для определения реактивного момента, а также соединенный с подвижным элементом и основанием датчик усилия для измерения тяги.
Недостатком прототипа является сложность конструкции и большая масса подвижного элемента, включающего общую опорную плиту, подшипниковые узлы, стержень, стальную пластину с двойным рычагом и датчик усилия. Большая подвижная масса гасит (демпфирует) переменную составляющую нагрузки, возникающую при работе двигателя и воздушного винта, что приводит к снижению точности измерений при переменных нагрузках.
Техническим результатом является упрощение конструкции стенда, повышение точности измерений динамической составляющей тяги и реактивного момента воздушного винта и его динамических характеристик.
Технический результат обеспечивает стенд для измерения тяги и реактивного момента воздушного винта и динамических характеристик воздушного винта с двигателем, содержащий основание и установленный с возможностью перемещения относительно основания подвижный элемент с моторной базой, на которую устанавливают двигатель с воздушным винтом, и рычагом, с которым сопряжен датчик усилия для определения реактивного момента, а также соединенный с подвижным элементом датчик усилия для измерения тяги, у которого в соответствии с предложенным решением, подвижный элемент выполнен в виде вала и установлен по меньшей мере на одну опору вращения и линейного движения вдоль оси вала с возможностью перемещения относительно основания и вращения вокруг собственной оси.
Кроме того, опора вращения и линейного движения представляет собой линейный подшипник с ограниченным ходом или линейно-поворотную шариковую втулку с ограниченным ходом, или радиальный газостатический подшипник, или радиальный гидростатический подшипник, или радиальный подшипники, который в свою очередь установлен на линейный подшипник, или линейный подшипник, который в свою очередь установлен на радиальный подшипник.
Кроме того, рычаг сопряжен с датчиком усилия для измерения реактивного момента посредством тела качения или гибкой тяги, или жесткой тяги, которая установлена через сферические шарниры.
Кроме того, рычаг соединен с датчиком усилия для измерения реактивного момента линейного типа через сферический шарнир.
Кроме того, на конце рычага установлен ролик, направление движения которого совпадает с направлением оси вала, при этом ролик сопряжен с датчиком усилия для измерения реактивного момента.
Кроме того, рычаг может быть выполнен из магнитного материала, по направлению воздействия рычага на датчик усилия для измерения реактивного момента установлен постоянный магнит, расстояние между рычагом и магнитом может регулироваться.
Кроме того, на рычаг может быть установлена пластина из магнитного материала или постоянный магнит, по направлению воздействия рычага на датчик усилия для измерения реактивного момента установлен постоянный магнит, расстояние между пластиной из магнитного материала или постоянным магнитом и магнитом может регулироваться.
Кроме того, на рычаг может быть установлен постоянный магнит, со стороны противоположной направлению воздействия рычага на датчик усилия для измерения реактивного момента установлен второй магнит, причем магниты установлены одинаковыми полюсами друг к другу и расстояние между ними может регулироваться.
Кроме того, по направлению воздействия рычага на датчик усилия для измерения реактивного момента, рычаг может быть притянут пружиной растяжения, натяжение которой может регулироваться.
Кроме того, на конец вала установлен соосный датчик усилия для измерения тяги воздушного винта, второй конец которого соединен с самоустанавливающимся упорным или двухрядным сферическим подшипником, который установлен между двумя стенками, ограничивающими его продольное движение, но не ограничивающими радиального движения.
Кроме того, на вал установлен рычаг, конец вала соединен с самоустанавливающимся упорным или двухрядным сферическим подшипником, который установлен между двумя стенками, ограничивающими его продольное движение, но не ограничивающими радиального движения, на поверхности вала в промежутке между рычагом и упорным подшипником установлены тензодатчики.
Кроме того, на конец вала установлен рычаг в виде «С» образной скобы, которая взаимодействует с датчиком усилия для измерения тяги воздушного винта и датчиком усилия для измерения реактивного момента.
Сущность изобретения поясняется следующим графическим материалом:
На фиг. 1 изображен общий вид стенда для измерения тяги и реактивного момента воздушного винта.
На фиг. 2а изображен опорный узел с использованием линейных подшипников ограниченного хода.
На фиг. 2б изображен опорный узел с использованием линейно-поворотной шариковой втулки с ограниченным ходом.
На фиг. 2в изображен опорный узел с использованием радиальных газостатических или гидростатических подшипников
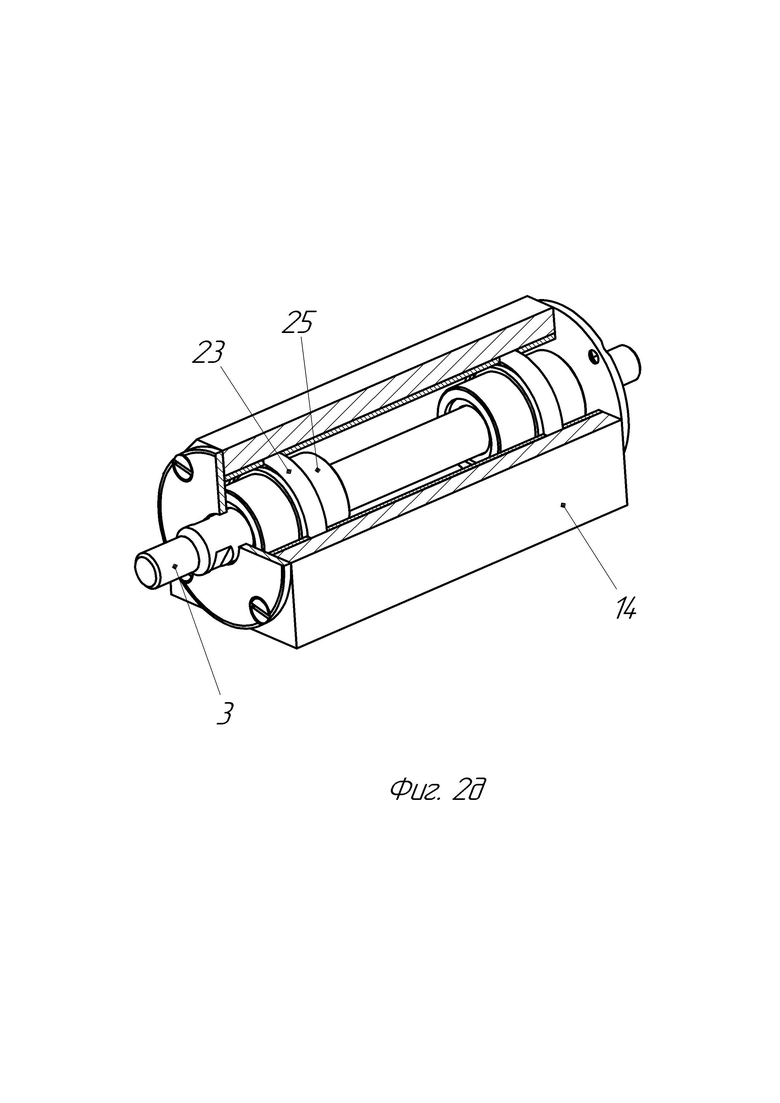
На фиг. 2г изображен опорный узел, в котором вал установлен в радиальные подшипник, которые в свою очередь установлен в линейные подшипники.
На фиг. 2д изображен опорный узел, в котором вал установлен вал в линейные подшипники, которые в свою очередь установлены в радиальные подшипники.
На фиг. 3а изображен вариант сопряжения рычага с датчиком усилия посредством шарика и вариант прижатия рычага к датчику усилия постоянным магнитом, вид по стрелке А фиг. 1.
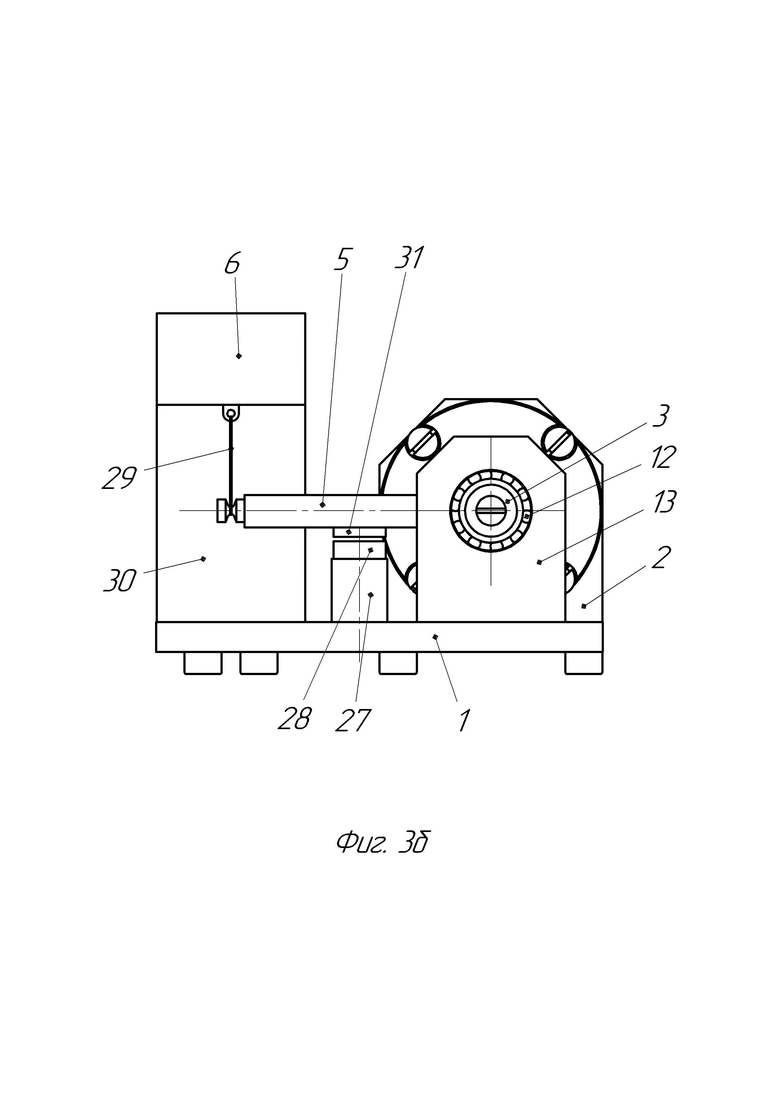
На фиг. 3б изображен вариант сопряжения рычага с датчиком усилия посредством гибкой тяги и вариант прижатия рычага к датчику усилия с помощью магнитной пластины и постоянного магнита, вид по стрелке А фиг. 1.
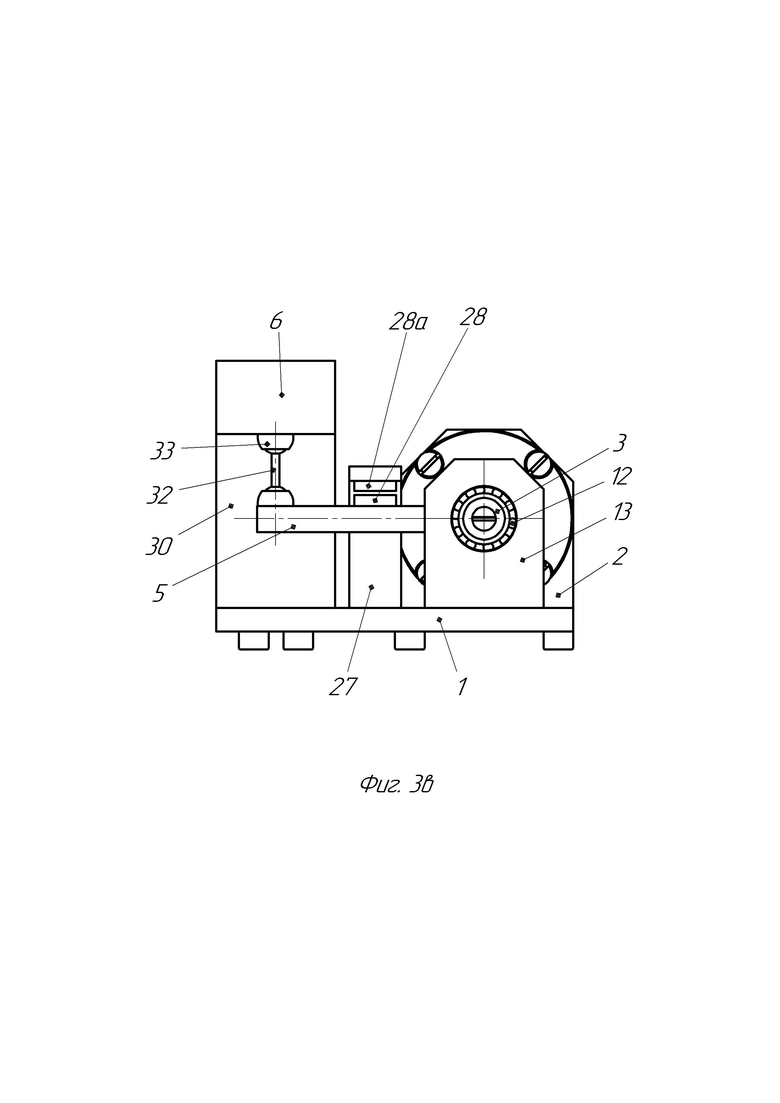
На фиг. 3в изображен вариант сопряжения рычага с датчиком усилия посредством жесткой тяги и вариант прижатия рычага к датчику усилия с помощью двух магнитов, которые повернуты друг к другу одноименными полюсами, вид по стрелке А фиг. 1.
На фиг. 3г изображен вариант сопряжения рычага с линейным датчиком усилия посредством сферического шарнира и вариант прижатия рычага к датчику усилия с помощью пружины растяжения, вид по стрелке А фиг. 1.
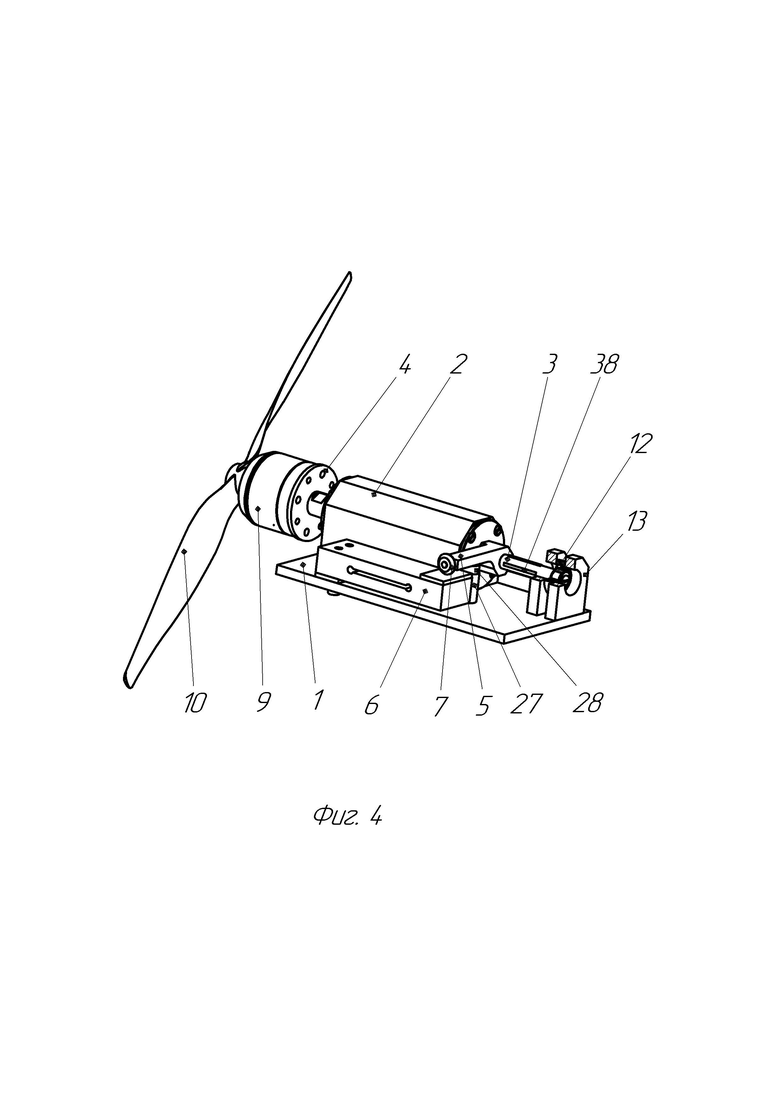
На фиг. 4 изображен общий вид стенда для измерения тяги и реактивного момента воздушного винта с установленными на валу тензодатчиками.
На фиг. 5 изображен общий вид стенда для измерения тяги и реактивного момента воздушного винта с «С» образной скобой.
Стенд для измерения тяги и реактивного момента воздушного винта, и динамических характеристик воздушного винта с двигателем вариант исполнения фиг. 1 содержит основание 1, по меньшей мере один опорный узел 2, с по меньшей мере одной опорой (на фиг. 1 не показана) вращения и линейного движения, на которую установлен вал 3, имеющий возможность перемещения относительно основания 1 и вращения вокруг собственной оси, и выполняющий функцию подвижного элемента. На вал 3 установлены моторная база 4 и рычаг 5, который сопряжен с установленным на основании 1 датчиком 6 усилия для измерения реактивного момента посредством ролика 7 или аналогичным элементом, содержащим тело вращения. С другой стороны рычага 5 установлен прижимной ролик 8, который может быть подпружинен. При проведении испытаний на моторную базу 4 устанавливают двигатель 9 с воздушным винтом 10 таким образом, чтобы вал двигателя 9 и, соответственно, ось вращения воздушного винта 10 были установлены соосно или параллельно валу 3. На противоположном от моторной базы 4 конце вала 3 установлен датчик 11 усилия для измерения тяги воздушного винта 10, второй конец датчика 11 усилия для измерения тяги воздушного винта 10 установлен на самоустанавливающийся двухрядный сферический подшипник 12, который расположен между двумя стенками 13, ограничивающими его продольное движение, но не ограничивающими радиального движения.
В представленном на фиг. 1 и других вариантах исполнения стенда установлен воздушный винт 10 левого вращения при взгляде со стороны воздушного винта 10. При этом воздушный винт создаст тягу, направленную справа налево вдоль оси вала 3 по фиг. 1, реактивный момент будет направлен по часовой стрелке, т.е. направление воздействия рычага 5 на датчик 6 усилия для измерения реактивного момента будет вниз, на датчик 6. Соответственно, прижимной ролик 8, который расположен сверху рычага находится со стороны противоположной направлению воздействия рычага на датчик усилия для измерения реактивного момента.
Моторная база 4 имеет места присоединения двигателя 9 и может быть универсальной или сменной для каждого типа испытываемого двигателя 9 с воздушным винтом 10.
Моторная база 4, вал 3 и рычаг 5 могут быть изготовлены из легких сплавов или полимерных материалов, а также иметь внутреннюю полость для облегчения веса. При этом они должны иметь достаточную для испытываемых нагрузок жесткость, чтобы обеспечить работоспособность.
Опорный узел 2 включает в себя по меньшей мере одну опору вращения и линейного движения вдоль оси вала 3 из нижеследующих перечисленных устройств: линейный подшипник с ограниченным ходом (фиг. 2а); линейно-поворотная шариковая втулка с ограниченным ходом (фиг. 2б); радиальный газостатический подшипник; радиальный гидростатический подшипник (фиг. 2в); радиальный подшипник, который в свою очередь установлен на линейный подшипник (фиг. 2г); линейный подшипник, который в свою очередь установлен на радиальный подшипник (фиг. 2д).
Опорный узел 2 (фиг. 2а) на линейных подшипниках ограниченного хода содержит корпус 14, внутри которого установлены две опоры вращения и линейного движения в виде линейных подшипников 15 ограниченного хода разделённые между собой распорной втулкой 16. Линейный подшипник 15 ограниченного хода состоят из наружного кольца 17, сепаратора 18 и шариков 19. Сепаратор 18 выполнен короче наружного кольца 17, разница их длин составляет половину величины допустимого линейного хода. Вал 3 входит в линейный подшипник 15 и контактирует с шариками 19. Такой опорный узел 2 содержит две опоры вращения и линейного движения и обеспечивает неограниченную свободу вращательного движения вала 3 и линейное движение вала 3, величина которого достаточна для работы стенда.
Опорный узел 2 (фиг. 2б) на линейно-поворотных шариковых втулках содержит корпус 14 и одну опору в виде линейно-поворотной шариковой втулки 20 с ограниченным ходом, которая состоит из наружного кольца 17, сепаратора 18 и шариков 19. Отличие линейно-поворотной втулки 20 от линейного подшипника 15 ограниченного хода заключается в длине наружного кольца 17 и сепаратора 18. Линейно-поворотная втулка 20 значительно длиннее линейного подшипника 15 с ограниченным ходом, имеет значительно большую грузоподъемность и может заменить две опоры. Сепаратор 18 выполнен короче наружного кольца 17, разница их длин составляет половину величины допустимого линейного хода. Вал 3 контактирует с шариками 19. Такой опорный узел 2 содержит одну опору и обеспечивает неограниченную свободу вращательного движения вала 3 и линейное движение вала 3, величина которого достаточно для работы стенда.
Опорный узел 2 (фиг. 2в) на радиальных газостатических подшипниках содержит корпус 14 и одну или две опоры в виде газостатического подшипника, корпус которых совпадает с корпусом 14 опорного узла 2, куда установлены один или два перфорированных или пористых вкладыша 21 и штуцеры 22 для подвода сжатого воздуха. Вал 3 устанавливается в центральное отверстие вкладышей 21 с небольшим зазором. Такой опорный узел 2 обеспечивает неограниченную свободу вращательного и линейного движения вала 3.
Опорный узел 2 на радиальных гидростатических подшипниках не имеет принципиальных отличий в конструкции от опорного узла 2 на радиальных газостатических подшипниках. Отличие заключается в соотношениях размеров деталей и работе с использованием подаваемого под давлением масла. Такой опорный узел 2 обеспечивает неограниченную свободу вращательного и линейного движения вала 3.
Опорный узел 2 (фиг. 2г) содержит корпус 14 и две комбинированные опоры, в которых вал 3 установлен в радиальные подшипники 23, которые в свою очередь с помощью втулок 24 установлены в линейные подшипники 25. Радиальный подшипник 23 может быть шариковым, роликовым или игольчатым, линейный подшипник 25 - шариковым. Радиальный подшипник 23 обеспечивает неограниченную свободу вращательно движения вала 3, линейный подшипник 25 – неограниченную свободу линейного движения в осевом направлении втулок 24, радиальных подшипников 23 и вала 3.
Опорный узел 2 (фиг. 2д) содержит корпус 14 и две комбинированные опоры, в которых вал 3 установлен в линейные подшипники 25, которые в свою очередь установлены в радиальные подшипники 23. Радиальный подшипник 23 может быть шариковым, роликовым или игольчатым, линейный подшипник 25 - шариковым. Радиальный подшипник 23 обеспечивает неограниченную свободу вращательно движения линейного подшипника 25 и вала 3, линейный подшипник 25 – неограниченную свободу линейного движения в осевом направлении вала 3.
Представленные выше опорные узлы 2 выполнены в едином корпусе 14 и достаточны для удержания вала 3 в рабочем положении. Возможен вариант исполнения стенда, в котором используются два опорных узла 2 каждая из которых содержит одну опору. Возможны другие варианты исполнения опорных узлов 2, обеспечивающих вращательное и линейное движение вала 3 с минимальным трением.
Рычаг 5 может быть установлен на вал 3 непосредственно рядом с моторной базой 4, между опорами или опорными узлами 2 или на противоположном от моторной базы 4 конце вала 3 (фиг. 1) и сопрягается своим концом с датчиком 6 усилия для измерения реактивного момента. На фиг. 1 рычаг 5 сопряжен с датчиком 6 усилия посредством ролика 7, направление движение которого совпадает с направлением оси вала 3. Ролик 7 цилиндрический или с выпуклой образующей поверхностью, установлен на конец рычага 5 на подшипники качения (не показано). Прижимной ролик 8 находится со стороны противоположной направлению воздействия рычага 5 на датчик усилия 6 для измерения реактивного момента и имеет цилиндрическую или выпуклую образующую поверхность, и установлен жестко.
Возможны также следующие варианты исполнения стенда для измерения тяги и реактивного момента воздушного винта, в которых рычаг 5 сопрягается с датчиком 6 усилия для измерения реактивного момента и прижат к нему одним из нижеследующих устройств:
В варианте исполнения стенда фиг. 3а сопряжение конца рычага 5 с датчиком 6 усилия для измерения реактивного момента производится посредством тела качения. Это может быть шарик 26 или ролик (не показаны), которые установлены между концом рычага 5 и датчиком 6 усилия для измерения реактивного момента. При этом направление качения ролика (не показано) должно совпадать с направлением оси вала 3.
Рычаг 5 выполнен из магнитного материала, по направлению воздействия рычага на датчик 6 усилия для измерения реактивного момента на стойке 27 установлен постоянный магнит 28, расстояние между рычагом 5 и магнитом 28 может регулироваться изменением высоты стойки 27.
Рычаг 5 также может быть сопряжен с датчиком 6 усилия посредством гибкой тяги 29, фиг. 3б. В этом случае датчик 6 усилия для измерения реактивного момента установлен на стойке 30, т. е. с другой стороны от рычага 5, чем в варианте исполнения фиг. 1. В качестве гибкой тяги 29 могут быть использованы стальной трос, металлическая струна, проволока имеющие высокую жесткость на растяжение, но при этом достаточную гибкость и т.п.
Если рычаг 5 выполнен из немагнитного материала или материала со слабыми магнитными свойствами, на нижнюю плоскость рычага 5 (фиг. 3б) установлена пластина 31 из магнитного материала или постоянный магнит, по направлению воздействия рычага на датчик 6 усилия для измерения реактивного момента на стойке 27 установлен постоянный магнит 28 или пластина из магнитного материала. Расстояние между пластиной 31 из магнитного материала и магнитом 28 может регулироваться путем изменения высоты стойки 27. Возможна также установка магнита 28 на нижнюю плоскость рычага 5 и стойку 27, в этом случае магниты 28 направлены друг к другу разными полюсами.
Рычаг 5 (фиг. 3в) также может быть сопряжен с датчиком 6 усилия посредством жесткой тяги 32, которая соединена с рычагом 5 и датчиком 6 усилия для измерения реактивного момента с помощью сферических шарниров 33, шарнирных подшипников (не показано) или шарнирной головки со встроенным подшипником с двойным рядом шариков (не показано). Датчик 6 усилия для измерения реактивного момента установлен на опору 30 и находиться с другой стороны, чем в варианте исполнения фиг. 1.
В этом варианте исполнения на верхнюю плоскость рычага 5 установлен постоянный магнит 28, со стороны противоположной направлению воздействия рычага 5 на датчик усилия 6 для измерения реактивного момента на кронштейне 27 установлен второй магнит 28а, причем магниты 28 и 28а установлены одинаковыми полюсами друг к другу и расстояние между ними может регулироваться изменением высоты кронштейна 27.
На фиг. 3г применен датчик 6 усилия для измерения реактивного момента линейного типа и соединяется с рычагом 5 и кронштейном 34 с помощью сферических шарниров 33, шарнирных подшипников (не показано) или шарнирных головок со встроенным подшипником с двойным рядом шариков (не показано).
Предварительную нагрузку на датчик 6 усилия для измерения реактивного момента создает пружина 35, которая установлена по направлению воздействия рычага 5 на датчик 6 усилия для измерения реактивного момента и соединена с рычагом 5 с помощью винта 36, и гайки 37. Натяжение пружины 35 регулируется навинчиванием (свинчиванием) гайки 37 и изменением вылета винта 36.
Все представленные на фиг 1, 3а, 3б, 3в, 3г варианты сопряжения рычага 5 с датчиком 6 усилия для измерения реактивного момента и варианты прижатия рычага 5 к датчику 6 усилия для измерения реактивного момента независимы друг от друга и могут быть комбинированы между собой. Возможны другие варианты сопряжения рычага 5 с датчиком 6 усилия для измерения реактивного момента и варианты прижатия рычага 5 к датчику 6 усилия для измерения реактивного момента, которые обеспечивают отсутствие или минимизацию трения между рычагом 5 и датчиком 6 усилия для измерения реактивного момента, и устройством прижатия и рычагом 5, требуемый предварительный натяг датчика 6 усилия для измерения реактивного момента.
Все представленные на фиг 1, 3а, 3б, 3в, 3г варианты прижатия рычага 5 к датчику усилия 6 для измерения реактивного момента могут быть использованы для создания предварительного натяга датчика 11 для измерения тяги воздушного винта 10. Для этого они устанавливаются таким образом, что создаваемое ими усилие растягивает датчик 11 для измерения тяги воздушного винта 10 при работе его на растяжение или сжимают, если он работает на сжатие.
Датчик 6 усилия для измерения реактивного момента на фиг. 1 представлен в виде датчика балочного типа, работающего на изгиб. Возможно также применение датчика, работающего на сжатие, выполненного в виде цилиндрической шайбы и т. п.
Датчик 11 усилия для измерения тяги воздушного винта 10 на фиг. 1 представлен в виде работающего на растяжение линейного датчика цилиндрического типа. Возможно также применение работающего на растяжение датчика линейного типа, с “S” образным и другими формами корпусов. В том случае, если стенд используется для определения тяги воздушного винта 10 направленного на датчик 11 усилия для измерения тяги используется работающий на сжатие датчик линейного типа.
Представленные на фиг. 1 датчик 6 усилия для измерения реактивного момента и датчик 11 усилия для измерения тяги воздушного винта 10 тензометрического типа. Возможно применение датчиков усилия, работа которых основана на других физических принципах. Предпочтение отдается датчикам, имеющим высокие частотные характеристики, например, пьезоэлектрические датчики. Возможна также последовательная установка датчиков, имеющих различные частотные характеристики, что позволяет повысить диапазон измеряемых частот изменения тяги и реактивного момента.
Стенд для измерения тяги и реактивного момента воздушного винта, и динамических характеристик воздушного винта с двигателем вариант исполнения фиг. 4 содержит основание 1, по меньшей мере один опорный узел 2, с по меньшей мере одной опорой (на фиг. 4 не показана) вращения и линейного движения, на которую установлен вал 3, имеющий возможность перемещения относительно основания 1 и вращения вокруг собственной оси и выполняющий функцию подвижного элемента. На вал 3 установлены моторная база 4 и рычаг 5, который сопряжен с установленным на основание 1 датчиком 6 усилия для измерения реактивного момента посредством ролика 7 или аналогичного элемента, содержащего тело вращения. Рычаг 5 выполнен из магнитного материала, под рычагом 5 (по направлению воздействия рычага на датчик усилия для измерения реактивного момента) на стойке 27 установлен постоянный магнит 28. При проведении испытаний на моторную базу 4 устанавливают двигатель 9 с воздушным винтом 10. На конец вала 3 установлен самоустанавливающийся двухрядный сферический подшипник 12, который расположен между двумя стенками 13, ограничивающими его продольное движение, но не ограничивающие радиального движения. На вале 3 в промежутке между рычагом 5 и сферическим подшипником 12 установлены тензодатчики 38.
На фиг 5 представлен вариант исполнения стенда для измерения тяги и реактивного момента воздушного винта, и динамических характеристик воздушного винта с двигателем, в котором рычаг 5 выполнен в виде «С» образной скобы, которая взаимодействует с датчиком усилия 6 для определения реактивного момента и с датчиком 11 для измерения тяги воздушного винта 10 балочного типа.
Стенд для измерения тяги и реактивного момента воздушного винта, и динамических характеристик воздушного винта с двигателем вариант исполнения фиг. 5 содержит основание 1, по меньшей мере один опорный узел 2, с по меньшей мере одной опорой вращения и линейного движения (на фиг. 5 не показана), на которую установлен вал 3, имеющий возможность перемещения относительно основания 1 и вращения вокруг собственной оси и выполняющий функцию подвижного элемента. На вал 3 установлена моторная база 4, на другой конец установлен рычаг 5 в виде «С» образной скобы, которая взаимодействует с датчиком 6 усилия для определения реактивного момента и с датчиком 11 для измерения тяги воздушного винта 10. При проведении испытаний на моторную базу 4 устанавливают двигатель 9 с воздушным винтом 10. Рычаг 5 взаимодействует с датчиком 6 усилия для измерения реактивного момента посредством установленного на конце ролика 7, направление движение которого совпадает с направлением оси вала 3. Рычаг 5 может быть выполнен из магнитного материала, под рычагом 5 (по направлению воздействия рычага на датчик усилия для измерения реактивного момента) на стойке 27 установлен постоянный магнит 28 аналогично фиг. 3а. В качестве датчика 11 для измерения тяги воздушного винта 10 применен балочный датчик усилия аналогично датчику 6 для измерения реактивного момента. Рычаг 5 взаимодействует с датчиком 11 для измерения тяги воздушного винта 10 через тело качения - шарик 26. С обратной стороны от датчика 11 для измерения тяги воздушного винта 10 установлен кронштейн 39 с нажимным винтом 40. Нажимной винт воздействует на датчик 11 для измерения тяги воздушного винта 10 через тело качения - шарик 26. Оба шарика 26 установлены соосно валу 3.
Работа стенда
Стенд для измерения тяги и реактивного момента воздушного винта устанавливается осью вала 3 горизонтально над землей на высоте более длины лопасти воздушного винта 10 или вертикально, на такой высоте, на которой воздушный винт не проявляет экранный эффект. Двигатель 9 с воздушным винтом 10 устанавливаются на моторную базу 4 таким образом, чтобы вал двигателя 9 и, соответственно, ось вращения воздушного винта 10 были установлены соосно или параллельно валу 3. Рычаг 5 поджат к датчику 6 усилия для измерения реактивного момента посредством ролика 8. Это позволяет исключить ударное воздействие на датчик 6 усилия для измерения реактивного момента и отскок рычага 5 после завершения вращения двигателя 9. Предварительная нагрузка датчики 6 улучшают точность измерении.
Запускается вращение двигателя 9 с воздушным винтом 10.
При вращении вала двигателя 9 установленный на нем воздушный винт 10 создает тягу, которая направлена справа налево вдоль оси вала 3. Вращение двигателя 9 с воздушным винтом 10 приводит к возникновению реактивного момента вращения, которое воздействует на корпус двигателя 9. Вращение воздушного винта 10 левое при взгляде со стороны воздушного винта 10 соответственно реактивный момент будет направлен по часовой стрелке.
Помимо указанных сил и моментов могут возникать центробежная сила, направленная перпендикулярная оси вращения вала двигателя 9, которая связана с недостаточной балансировкой подвижных частей двигателя с воздушным винтом 10, другие силы и моменты.
Все возникающие при вращении двигателя 9 с воздушным винтом 10 силы и момент вращения передаются моторной базе 4, а от него к валу 3.
Стенд для измерения тяги и реактивного момента воздушного винта реализует такую кинематическую схему, при которой из всех возникающих при работе двигателя 9 и воздушного винта 10 сил отбирает для измерения только необходимые и принимает меры к минимизации искажений этих сил.
Все возникающие при работе воздушного винта 10 силы, направленные перпендикулярно оси вращения вала 3 воздействуют радиально на опоры вращения и линейного движения (т. е. на шариковые или газостатические (гидростатические) подшипники), которые поглощают их.
Сила тяги воздушного винта 10 может свободно тянуть вал 3 по направлению тяги воздушного винта 10.
Реактивный момент вращения воздушного винта 10, который направлен по часовой стрелке, против вращения воздушного винта 10, может свободно вращать вал 3.
Благодаря тому, что опоры вращения и линейного движения представляют собой шариковые или газостатические (гидростатические) подшипники трение движению вала 3 вдоль оси и вращению вала 3 минимально. Радиальная нагрузка, которая действует на опоры вращения и линейного движения (не показаны), создает минимальное трение.
Момент вращения от вала 3 передается на рычаг 5, который через ролик 7 воздействует (давит) на датчик 6 усилия для определения реактивного момента с силой, величина которой пропорциональна реактивному моменту и обратно пропорциональна длине рычага 5 в направлении сверху вниз, и прогибает его на незначительную (доли миллиметра) величину. Деформация корпуса датчика 6 усилия для определения реактивного меняют сопротивления входящих в их состав (установленных на корпусе) тензорезисторов, что измеряется системой измерения стенда. Благодаря тому, что деформация имеет малую величину, вал 3 от действия реактивного момента поворачивается на очень малый угол. Рычаг 5 воздействует на датчик 6 усилия для определения реактивного момента посредством ролика 7, который установлен на подшипники (не показано). Это заменяет трение скольжения на трение качения между рычагом 5 и датчиком 6 усилия для определения реактивного момента, что значительно снижает влияние силы трения на результаты измерения силы тяги воздушного винта 10.
До рычага 5 вал 3 испытывает сложное напряженно-деформированное состояние кручения и растяжения. После рычага 5 остается только растяжение, и поэтому датчик 11 измерения тяги воздушного винта 10 испытывает и измеряет только линейную нагрузку. Возможность воздействия какой-либо нагрузки кручения исключена за счет применения самоустанавливающегося двухрядного сферического подшипника 12, который воспринимает осевую нагрузку, а установка его между стенок 13 с возможностью радиального смещения исключает возможность возникновения изгибающей нагрузки на датчик 11 измерения тяги воздушного винта 10.
Тяга воздушного винта 10 перемещает вал 3, который датчик 11 измерения тяги воздушного винта 10 на малую величину (доли миллиметра), сопротивления входящих в их состав (установленных на корпусе) тензорезисторов изменяются, что измеряется системой измерения стенда. Таким образом каждый датчик 11 усилия находится под воздействием характерного для его измерения нагрузки, что позволяет обеспечить высокую точность измерения.
Представленное решение позволяет снизить массу подвижного элемента с моторной базой 4 по сравнению известными аналогичными стендами. Соответственно, снижение массы приводит к уменьшению инерционности, т.е. позволяет быстрее реагировать на изменение тяги воздушного винта 10 и реактивного момента и поэтому такой стенд обеспечивает более точные измерения переменных величин тяги и реактивного момента испытуемого двигателя 9 и воздушного винта 10 характерного для маневрирования, то есть динамических характеристик воздушного винта 10 с двигателем 9.
Работа опорных узлов 2.
Опорный узел 2 обеспечивает вращение и линейное перемещение вала 3. Для проведения измерений важно обеспечить минимальные величины трения при вращении и осевом движении. Для этого используются опоры вращения и линейного движения (не показано) на линейных или газостатических (гидростатических) подшипниках.
Опорный узел 2 вариант исполнения фиг. 2а содержит два линейных подшипника 15 ограниченного хода, которые позволяют производить неограниченное вращение и ограниченное линейное движение установленного в них вала 3. Вращение вала 3 приводит к движению шариков 19 по кругу относительно наружного кольца 17 и вращательному движению сепаратора 18. Линейное движение вала 3 приводит к линейному движению шариков 19 вдоль оси вала 3 относительно наружного кольца 17 и линейному движению сепаратора 18. Таким образом опорный узел 2 вариант исполнения фиг. 2а позволяет производить вращение и линейное движение вала 3 с минимальным трением качения шариков 19, что снижает влияние сил трения на результаты измерений и таким образом повышается точность измерений.
Опорный узел 2 вариант исполнения фиг. 2б содержит одну линейно-поворотную шариковую втулку 20 с ограниченным ходом, которая состоит из наружного кольца 17, сепаратора 18 и шариков 19, то есть аналогичен линейным подшипникам 15 ограниченного хода. Вращение вала 3 приводит к движению шариков 19 по кругу относительно наружного кольца 17 и вращательному движению сепаратора 18. Линейное движение вала 3 приводит к линейному движению шариков 19 вдоль оси вала 3 относительно наружного кольца 17 и линейному движению сепаратора 18. Таким образом опорный узел 2 вариант исполнения фиг. 2б позволяет производить вращение и линейное движение вала 3 с минимальным трением качения шариков 19, что снижает влияние сил трения на результаты измерений и таким образом повышается точность измерений.
Опорный узел 2 на газостатических (гидростатических) подшипниках (фиг. 2в) работает при подаче давления воздуха (масла) в штуцеры 22. Воздух (масло) подается через штуцеры 22, растекается в объёме между корпусом 14 и перфорированных или пористым вкладышем 21. Воздух (масло) вытекает через перфорированный вкладыш 21 и создает давление в пространстве между внутренней стенкой вкладыша 21 и валом 2. Это давление заставляет вал 3 повиснуть в отверстии вкладыша 21. Вал 3 имеет возможность вращения и линейного движения. Данный опорный узел 2 отличает самое низкое трение и наименьшее влияние сил трения на результаты измерений и соответственно обеспечивает самую высокую точность измерений из представленных на фиг. 2а – 2д устройств.
Опорный узел 2 (фиг. 2г), в котором вал 3 установлен на радиальные подшипники 23, которые в свою очередь с помощью втулок 24 установлены на линейные подшипники 25 содержит две комбинированные таким образом опоры вращения и линейного движения (поз. не указаны). При вращении вала 3 происходит вращение внутреннего кольца, шариков и сепаратора радиального подшипника 23. При линейном движении вала 3 происходит линейное движение радиального подшипника 23 и втулки 24. Радиальный подшипник 23 обеспечивает свободу вращательного движения вала 3, линейный подшипник 25 – свободу линейного движения в осевом направлении вала 3. При этом реализуется минимальное трение качения, что снижает влияние сил трения на результаты измерений и таким образом повышается точность измерений.
Опорный узел 2 (фиг. 2д), в котором вал 3 установлен на линейные подшипники 25, которые в свою очередь установлены на радиальные подшипники 23 содержит две комбинированные таким образом опоры вращения и линейного движения (поз. не указаны).
При вращении вала 3 происходит вращение линейного подшипника 25, внутреннего кольца, шариков и сепаратора радиального подшипника 23. При линейном движении вала 3 происходит линейное движение шариков линейного подшипника. Радиальный подшипник 23 обеспечивает свободу вращательно движения вала 3, линейный подшипник 25 – свободу линейного движения в осевом направлении вала2. При этом реализуется минимальное трение качения, что снижает влияние сил трения на результаты измерений и таким образом повышается точность измерений.
Сопряжение рычага 5 с датчиком 6 усилия для измерения реактивного момента производится посредством тела качения. Это может быть шарик 26 (фиг. 3а) или ролик (не показан), которые установлены между концом рычага 5 и датчиком 6 усилия для измерения реактивного момента. На фиг. 1 рычаг 5 сопряжен с датчиком 6 усилия для измерения реактивного момента посредством установленного на него ролика 7, направление движение которого совпадает с направлением оси вала 3. Ролик 7 установлен на подшипники качения (не показано). Такое сопряжение позволяет снизить до минимума трение между рычагом 5 и датчиком 6 усилия для измерения реактивного момента и снизить таким образом влияние на измерение датчиком 11 измерения тяги воздушного винта 10. При движении рычага 5 совместно с валом 3 вдоль оси вала 3 ролик 7 или шарик 26 или ролик (не показан), которые установлены между концом рычага 5 и датчиком 6 усилия для измерения реактивного момента перекатываются между ними заменяя силу трения скольжения на трение качения, которое значительно ниже трения скольжения, что снижает влияние сил трения на результаты измерений и таким образом повышается точность измерений.
Работа устройств прижатия рычага 5 к датчику 6 усилия для измерения реактивного момента роликом 8 (фиг. 1).
Назначение устройств прижатия рычага 5 к датчику 6 усилия для измерения реактивного момента роликом 8 – поджатие датчика 6 усилия для измерения реактивного момента с целью исключения на него ударных воздействий при работе на переменных усилиях тяги и повышение точности измерения за счет предварительного натяга датчика 6 усилия.
Работа прижимного ролика 8 (фиг. 1) заключается в прижатии рычага 5 в направлении воздействия рычага на датчик усилия 6 для измерения реактивного момента определенным усилием и замена трения скольжения на трение качения. При движении рычага 5 совместно с валом 3 вдоль оси вала 3 ролик 7 перекатывается по рычагу 5, заменяя силу трения скольжения на трение качения, которое значительно ниже трения скольжения, что снижает влияние сил трения на результаты измерений и таким образом повышается точность измерений.
В варианте исполнения фиг. 3а постоянный магнит 28 притягивает рычаг 5 с заданным усилием без контакта с ним. При движении рычага 5 совместно в валом 3 вдоль оси вала 3 между рычагом 5 и постоянным магнитом 28 не возникает силы трения, так как отсутствует контакт, а магнитная сила не направлена вдоль оси вала 3. Сила прижима рычага 5 может регулироваться изменением зазора между постоянным магнитом 28 и рычагом 5 путем изменения высоты стойки 27.
Гибкая тяга 29 (фиг. 3б) натянута от датчика 6 усилия для измерения реактивного момента к рычагу 5, направлена перпендикулярно направлению оси вала 3 и передает усилие только вдоль линии натяжения. Незначительные движения рычага 5 не изменяют существенного наклон гибкой тяги 29 не приводят к появлению значимого усилия, направленного вдоль оси вала 3. Для этого длина гибкой тяги 29 должна быть существенно выше возможного перемещения рычага 5 вдоль оси вала 3.
Устройство прижима вариант исполнения фиг. 3б работает аналогично варианту исполнения фиг. 3а, где роль притягивающихся элементов выполняет пластина 31 из магнитного материала или постоянный магнит и установленный на стойке 27 постоянный магнит 28 или пластина из магнитного материала. Причем, если работает пара постоянных магнитов, они установлены разными полярностями друг к другу.
Жесткая тяга 32 (фиг. 3в) соединяет датчик 6 усилия для измерения реактивного момента с рычагом 5 через сферические шарниры 33, шарнирные подшипники (не показано) или шарнирную головку со встроенным подшипником с двойным рядом шариков (не показано), направлена перпендикулярно направлению оси вала 3 и передает усилие только вдоль линии натяжения. Незначительные движения рычага 5 совместно с валом 3 приводит к повороту сферических шарниров 33, но не изменяют существенного наклон жесткой тяги 32 и не приводят к появлению значимого усилия, направленного вдоль оси вала 3. Для этого длина жесткой тяги 32 должна быть существенно выше возможного перемещения рычага 5 вдоль оси вала 3.
Устройство прижима вариант исполнения фиг. 3в работает на отталкивании магнитов 28 и 28а, которые установлены друг к другу одной полярностью. Соответственно такое устройство прижима установлено со стороны противоположной направлению воздействия рычага 5 на датчик 6 усилия для измерения реактивного момента. Контакт между магнитами отсутствует. Величина усилия прижатия рычага 5 к датчику 6 усилия для измерения реактивного момента определяется расстоянием между магнитами 28 и 28а и регулируется высотой стойки 27. Т. к. контакт между магнитами отсутствует, отсутствует и сила трения между ними при движении рычага 5.
Датчик 6 (фиг. 3г) усилия для измерения реактивного момента линейного типа позволяет установить его через сферические шарниры 33, шарнирные подшипники (не показано) или шарнирные головки со встроенным подшипником с двойным рядом шариков (не показано). Между рычагом 5 и стойкой 34 или основанием 1 в зависимости от направления действия реактивного момента и компоновки стенда. В таком варианте датчик 6 усилия для измерения реактивного момента измеряет силу, направленную от одного сферического шарнира 33 к другому. Незначительные движения рычага 5 совместно с валом 3 приводят к повороту сферических шарниров 33, но не изменяют существенного наклон датчика 6 усилия для измерения реактивного момента и не приводят к появлению значимого усилия, направленного вдоль оси вала 3. Для этого длина расстояние между сферическими шарнирами 33 должна быть существенно больше возможного перемещения рычага 5 вдоль оси вала 3.
Усилие прижатия рычага 5 (фиг 3г) к датчику 6 усилия для измерения реактивного момента определяется натяжением пружины растяжения 35 установленного со стороны противоположной направлению воздействия рычага 5 на датчик 6 усилия для измерения реактивного момента и регулируется с помощью винта 36, длина вылета которого регулируется с помощью гайки 37. Движение рычага 5 совместно с валом 3, которое значительно меньше длины пружины растяжения 35 не приводит к возникновению значимых усилий против хода движения рычага 5.
Работа стенда для измерения тяги и реактивного момента воздушного винта вариант исполнения фиг. 4.
Двигатель 9 с воздушным винтом 10 устанавливаются на моторную базу 4, которая установлена на подвижный элемент стенда – вал 3. Рычаг 5 поджат к датчику 6 усилия для измерения реактивного момента посредством постоянного магнита 28. Это позволяет исключить ударное воздействие на датчик 6 усилия для измерения реактивного момента и отскок рычага 5 после завершения вращения двигателя 9. Подача предварительной нагрузки на датчики улучшают точность измерении.
Запускается вращение двигателя 9 с воздушным винтом 10
При вращении вала двигателя 9 установленный на нем воздушный винт 10 создает тягу, которая направлена справа налево вдоль оси вала 3. Вращение двигателя 9 с воздушным винтом 10 приводит к возникновению реактивного момента вращения, которое воздействует на корпус двигателя 9. Вращение воздушного винта 10 левое при взгляде со стороны воздушного винта 10 соответственно реактивный момент будет направлен по часовой стрелке.
Помимо указанных сил и моментов могут возникать центробежная сила, направленная перпендикулярная оси вращения вала двигателя 9, которая связана с недостаточной балансировкой подвижных частей двигателя с воздушным винтом 10, другие силы и моменты.
Все возникающие при вращении двигателя 9 с воздушным винтом 10 силы и момент вращения передаются моторной базе 4, а от него к валу 3.
Все возникающие при работе воздушного винта 10 силы, направленные перпендикулярно оси вращения вала 3 воздействуют радиально на опоры вращения и линейного движения (т. е. на шариковые или газостатические (гидростатические) подшипники), которые поглощают их.
Сила тяги воздушного винта 10 может свободно тянуть вал 3 по направлению тяги воздушного винта 10.
Момент вращения от вала 3 передается на рычаг 5, который через ролик 7 воздействует на датчик 6 усилия для определения реактивного момента с силой, величина которой пропорциональна реактивному моменту и обратно пропорциональна длине рычага 5 и прогибает его на незначительную (доли миллиметра) величину. Деформация корпуса датчика 6 усилия для определения реактивного момента меняют сопротивления входящих в их состав (установленных на корпусе) тензорезисторов, что измеряется системой измерения стенда. Благодаря тому, что деформация имеет малую величину, вал 3 от действия реактивного момента поворачивается на очень малый угол. Рычаг 5 воздействует на датчик 6 усилия для определения реактивного момента посредством ролика 7, которая установлена на подшипники (не показаны). Это заменяет трение скольжения на трение качения между рычагом 5 и датчиком 6 усилия для определения реактивного момента, что значительно снижает влияние силы трения на результаты измерения силы тяги воздушного винта 10. Рычаг 5 не имеет контакта с постоянным магнитом 28 осуществляющим прижатие рычага 5 к датчику 6 усилия для измерения реактивного момента и поэтому между ними не возникает силы трения. Конец вала 3 после рычага 5 работает только на растяжение и поэтому установленные на него тензорезисторы 38 регистрируют только растяжение вала 3 от усилия тяги воздушного винта 10.
Стенд для измерения тяги и реактивного момента воздушного винта вариант исполнения фиг. 5 отличается от варианта исполнения фиг. 1 тем, что в качестве датчика 11 для измерения тяги воздушного винта 10 применен балочный датчик, аналогичный датчику 6 для измерения реактивного момента. В связи с этим рычаг 5 выполнен в виде «С» образной скобы, которая взаимодействует с датчиком 6 усилия для определения реактивного момента и датчиком 11 для измерения тяги воздушного винта 10.
При работе двигателя 9 с воздушным винтом 10 реактивный момент вращения от вала 3 передается на рычаг 5, который через ролик 7 давит на датчик 6 усилия для определения реактивного момента с силой, величина которой пропорциональна реактивному моменту и обратно пропорциональна длине рычага 5 и прогибает его на незначительную (доли миллиметра) величину. Деформация корпуса датчика 6 усилия для определения реактивного меняет сопротивления входящих в их состав (установленных на корпусе) тензорезисторов, что измеряется системой измерения стенда. Благодаря тому, что деформация имеет малую величину, вал 3 от действия реактивного момента поворачивается на очень малый угол. Рычаг 5 воздействует на датчик 6 усилия для определения реактивного момента посредством ролика 7, который установлен на подшипники (не показано). Это заменяет трение скольжения на трение качения между рычагом 5 и датчиком 6 усилия для определения реактивного момента, что значительно снижает влияние силы трения на результаты измерения силы тяги воздушного винта 10.
Рычаг 5 не имеет контакта с устройством прижатия к датчику 6 усилия для измерения реактивного момента и поэтому между ними не возникает силы трения.
Второй конец рычага 5 посредством шарика 26 давит соосно валу 3 на датчик 8 для измерения тяги воздушного винта 10. Применение шарика 26 для взаимодействия рычага 5 и датчика 11 для измерения тяги воздушного винта 10 исключает возможность передачи момента вращения на датчик 11 и позволяет ей работать на характерных для него нагрузках, что позволяет обеспечить высокую точность измерений. Датчик 11 для измерения тяги воздушного винта 10 прогибается на незначительную (доли миллиметра) величину. Деформация корпуса датчик 11 для измерения тяги воздушного винта 10 меняют сопротивления входящих в их состав (установленных на корпусе) тензорезисторов, что измеряется системой измерения стенда.
Таким образом:
Разработан достаточно простой стенд для измерения тяги и реактивного момента воздушного винта с минимальным количеством входящих в него деталей, в котором на каждый датчик поступают только характерные для данного датчика нагрузки.
Стенд имеет минимальную массу подвижных частей, что в совокупности с применением пар скольжения на пары качения или воздействия через магнитное поле, или газовую (гидравлическую) прослойку позволяет повысить точность измерении, особенно переменных величин тяги и реактивного момента воздушного винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТУРБОМАШИНА С ВОЗДУШНЫМ(И) ВИНТОМ (ВИНТАМИ) ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ ДЛЯ ИЗМЕНЕНИЯ ШАГА ВОЗДУШНОГО ВИНТА | 2012 |
|
RU2604760C2 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| СТЕНД ДЛЯ ЦИКЛИЧЕСКИХ ИСПЫТАНИЙ ГАЗОДИНАМИЧЕСКИХ ПОДШИПНИКОВ | 2015 |
|
RU2587758C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ СОЧЛЕНЕНИЙ РУКАВОВ ВТУЛКИ С КОРПУСОМ ВТУЛКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2022 |
|
RU2795551C1 |
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |
| Архитектура "Топос" электрического привода воздушного винта | 2019 |
|
RU2786265C2 |
| Измерительная головка прибора для аэродинамических испытаний моделей соосных воздушных винтов | 1990 |
|
SU1816980A1 |
| ОТКРЫТЫЙ ВОЗДУШНЫЙ ВИНТ ДЛЯ ТУРБОМАШИНЫ | 2011 |
|
RU2558411C2 |
| УЗЕЛ ЛОПАСТИ НЕСУЩЕГО ВИНТА, ВОЗДУШНОЕ СУДНО С НЕСУЩИМ ВИНТОМ И ПРИВОДНАЯ СИСТЕМА ЗАКРЫЛКА ЛОПАСТИ НЕСУЩЕГО ВИНТА | 2013 |
|
RU2549735C2 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА ИЗМЕНЯЕМОГО ШАГА С МЕХАНИЗМОМ АВТОМАТИЧЕСКОГО ФЛЮГИРОВАНИЯ ЛОПАСТЕЙ | 2008 |
|
RU2383465C1 |








Изобретение относится к устройствам для измерения тяги и реактивного момента воздушного винта и может быть использовано при разработке стендов для отработки движителей для воздушной и водной среды. Стенд для измерения тяги и реактивного момента воздушного винта и динамических характеристик воздушного винта с двигателем содержит основание и установленный с возможностью перемещения относительно основания подвижный элемент с моторной базой, на которую устанавливают двигатель с воздушным винтом, и рычагом, с которым сопряжен датчик усилия для определения реактивного момента, а также соединенный с подвижным элементом датчик усилия для измерения тяги. Подвижный элемент выполнен в виде вала и установлен по меньшей мере на одну опору вращения и линейного движения вдоль оси вала с возможностью перемещения относительно основания и вращения вокруг собственной оси. Обеспечивается повышение точности измерений динамической составляющей тяги и реактивного момента воздушного винта и его динамических характеристик. 18 з.п. ф-лы, 12 ил.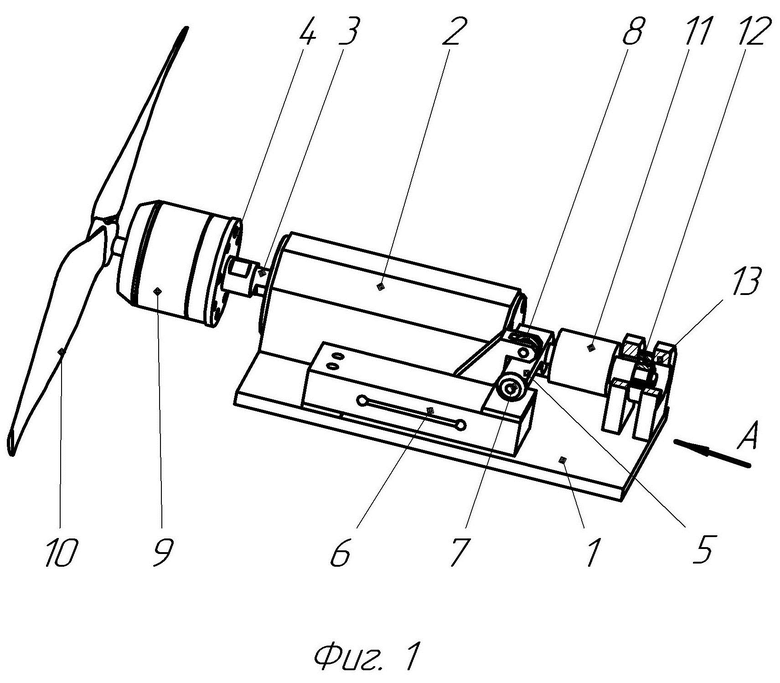
1. Стенд для измерения тяги и реактивного момента воздушного винта и динамических характеристик воздушного винта с двигателем, содержащий основание и установленный с возможностью перемещения относительно основания подвижный элемент с моторной базой, на которую устанавливают двигатель с воздушным винтом, и рычагом, с которым сопряжен датчик усилия для определения реактивного момента, а также соединенный с подвижным элементом датчик усилия для измерения тяги, отличающийся тем, что подвижный элемент выполнен в виде вала и установлен по меньшей мере на одну опору вращения и линейного движения вдоль оси вала с возможностью перемещения относительно основания и вращения вокруг собственной оси.
2. Стенд по п. 1, отличающийся тем, что опора вращения и линейного движения представляет собой линейный подшипник с ограниченным ходом.
3. Стенд по п. 1, отличающийся тем, что опора вращения и линейного движения представляет собой линейно-поворотную шариковую втулку с ограниченным ходом.
4. Стенд по п. 1, отличающийся тем, что опора вращения и линейного движения представляет собой радиальный газостатический подшипник.
5. Стенд по п. 1, отличающийся тем, что опора вращения и линейного движения представляет собой радиальный гидростатический подшипник.
6. Стенд по п. 1, отличающийся тем, что опора вращения и линейного движения представляет собой радиальный подшипники, который в свою очередь установлен на линейный подшипник.
7. Стенд по п. 1, отличающийся тем, что опора вращения и линейного движения представляет собой линейный подшипник, который в свою очередь установлен на радиальный подшипник.
8. Стенд по п. 1, отличающийся тем, что рычаг сопряжен с датчиком усилия для измерения реактивного момента посредством тела качения.
9. Стенд по п. 1, отличающийся тем, что рычаг сопряжен с датчиком усилия для измерения реактивного момента посредством гибкой тяги.
10. Стенд по п. 1, отличающийся тем, что рычаг соединен с датчиком усилия для измерения реактивного момента посредством жесткой тяги, которая установлена через сферические шарниры.
11. Стенд по п. 1, отличающийся тем, что рычаг соединен с датчиком усилия для измерения реактивного момента линейного типа через сферический шарнир.
12. Стенд по п. 1, отличающийся тем, что на конце рычага установлен ролик, направление движения которого совпадает с направлением оси вала, при этом ролик сопряжен с датчиком усилия для измерения реактивного момента.
13. Стенд по п. 1, отличающийся тем, что рычаг выполнен из магнитного материала, по направлению воздействия рычага на датчик усилия для измерения реактивного момента установлен постоянный магнит, расстояние между рычагом и магнитом может регулироваться.
14. Стенд по п. 1, отличающийся тем, что на рычаг установлена пластина из магнитного материала или постоянный магнит, по направлению воздействия рычага на датчик усилия для измерения реактивного момента установлен постоянный магнит, расстояние между пластиной из магнитного материала или постоянным магнитом и магнитом может регулироваться.
15. Стенд по п. 1, отличающийся тем, что на рычаг установлен постоянный магнит, со стороны противоположной направлению воздействия рычага на датчик усилия для измерения реактивного момента установлен второй магнит, причем магниты установлены одинаковыми полюсами друг к другу и расстояние между ними может регулироваться.
16. Стенд по п. 1, отличающийся тем, что по направлению воздействия рычага на датчик усилия для измерения реактивного момента, рычаг притянут пружиной растяжения, натяжение которой может регулироваться.
17. Стенд по п. 1, отличающийся тем, что на конец вала установлен соосный датчик усилия для измерения тяги воздушного винта, второй конец которого соединен с самоустанавливающимся упорным или двухрядным сферическим подшипником, который установлен между двумя стенками, ограничивающими его продольное движение, но не ограничивающими радиального движения.
18. Стенд по п. 1, отличающийся тем, что на вал установлен рычаг, конец вала соединен с самоустанавливающимся упорным или двухрядным сферическим подшипником, который установлен между двумя стенками, ограничивающими его продольное движение, но не ограничивающими радиального движения, на поверхности вала в промежутке между рычагом и упорным подшипником установлены тензодатчики.
19. Стенд по п. 1, отличающийся тем, что на конец вала установлен рычаг в виде «С» образной скобы, которая взаимодействует с датчиком усилия для измерения тяги воздушного винта и датчиком усилия для измерения реактивного момента.
| Стенд для испытания двигателей, преимущественно авиадвигателей | 1943 |
|
SU63575A1 |
| CN 106143949 A, 23.11.2016 | |||
| CN 104316290 A, 28.01.2015 | |||
| CN 104483053 A, 01.04.2015 | |||
| CN 202511930 U, 31.10.2012. | |||

