ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к авиационной технике, в частности, к электрическому приводу воздушного винта.
УРОВЕНЬ ТЕХНИКИ
Известно применение электрического привода для создания крутящего момента на оси вращения лопастного, в частности, воздушного винта. Целью такого применения является создание силы тяги воздушным винтом, прямо или опосредованно используемой для создания подъемной силы, действующей на летательный аппарат (ЛА). При этом, в частности, вал электрического двигателя напрямую жестко соединен с валом воздушного винта, образуя электрическую винтомоторную группу (ВМГ). В дальнейшем, по тексту сокращение ВМГ понимается в применении к воздушным винтам.
1. В сравнении с известным использованием тепловых машин, т.е. двигателей внутреннего сгорания, реактивных двигателей и т.п. в составе ВМГ, для создания крутящего момента на оси вращения воздушного винта, использование электрического привода позволяет:
1.1. существенно упростить конструкцию ВМГ;
1.2. повысить коэффициент полезного действия (КПД) ВМГ;
1.3. повысить надежность функционирования ВМГ.
2. Однако, применение в ЛА воздушных винтов с электрическим приводом ограничивается имеющимися уровнями удельной энергоемкости бортовых электрических батарей, приводя к существенно меньшим величинам возможного времени полета, по сравнению с эквивалентными по летно-техническим характеристикам (ЛТХ) ЛА, оснащенными тепловыми ВМГ. Особенно это касается ЛА с вертикальным взлетом и посадкой (ВВ/П).
2.1. Известны ЛА с электрическим приводом воздушных винтов, в том числе с ВВ/П, в частности:
2.1.1. Airbus
2.1.1.1. Airbus CityAirbus [1] – пассажирский многовинтовой ЛА ВВ/П с электрическими ВМГ, плоскости вращения винтов которых жестко зафиксированными в горизонтальном положением.
2.1.1.2. ЛТХ Airbus CityAirbus.
2.1.1.2.1. Количество пассажиров – 4
2.1.1.2.2. Взлетный вес - 2200 кг
2.1.1.2.3. Полезная нагрузка - 400 кг
2.1.1.2.4. Скорость полета - 120 км/час
2.1.1.2.5. Время полета - 15 мин.
2.1.1.2.6. Дальность полета - 30 км
2.1.1.2.7. Силовая установка – 4 соосных ВМГ (по 2 пропеллера в каждой), оснащенных электрическими моторами Siemens SP260D мощностью 100 КВт каждый [3].
2.1.1.3. Airbus A3 Vahana [2] – пассажирский ЛА с электрическими ВМГ, жестко закрепленными на крыльях, поворачивающихся вокруг своей продольной оси от вертикального положения, для обеспечения ВВ/П, до горизонтального, для обеспечения горизонтального полета.
2.1.1.4. ЛТХ Airbus A3 Vahana.
2.1.1.4.1. Количество пассажиров – 1
2.1.1.4.2. Взлетный вес - 565 кг
2.1.1.4.3. Полезная нагрузка - 90 кг
2.1.1.4.4. Скорость полета - 200 км/час
2.1.1.4.5. Время полета - 15 мин.
2.1.1.4.6. Дальность полета - 60 км
2.1.1.4.7. Силовая установка – 8 ВМГ, оснащенных электрическими двигателями мощностью 45 КВт каждый.
2.1.2. Uber Technologies
2.1.2.1. Uber Elevate eCRM-003 [4] – пассажирский ЛА ВВ/П для использования в качестве аэротакси. Аэродинамическая схема представляет собой самолет с двумя парами крыльев – передней и задней, оснащенный толкающей электрической ВМГ на законцовке киля, обеспечивающей горизонтальный полет. К законцовкам передних крыльев и к средине задних крыльев жестко прикреплены балки с фиксированными несущими электрическими ВМГ. В полете по-самолетному несущие винты отключаются, подъемная сила создается только аэродинамическими элементами - крыльями.
2.1.2.2. ЛТХ Uber Elevate eCRM-003.
2.1.2.2.1. Количество пассажиров - 4
2.1.2.2.2. Взлетный вес - 1800 кг
2.1.2.2.3. Полезная нагрузка - 400 кг
2.1.2.2.4. Скорость полета - 300 км/час
2.1.2.2.5. Время полета - 20 мин.
2.1.2.2.6. Дальность полета - 97 км
2.1.2.2.7. Силовая установка – электрические ВМГ: 1 маршевая, 4 несущих соосных.
2.2. Известно применение гибридных бортовых систем электроснабжения в качестве компромиссного решения, повышающего энерговооруженность ЛА с ВВ/П, оснащенного электрическими ВМГ при сохранении простоты и надежности электрического привода воздушного винта [6].
2.3. Все, перечисленные выше ЛА с ВВ/П, используют электрические ВМГ, что позволяет, как уже сказано выше, существенно упростить их конструкцию по сравнению с ЛА, использующими тепловые ВМГ. Указанные аэродинамические схемы направлены, на улучшение ЛТХ ЛА с электрическими ВМГ и прежде всего, на увеличение полетного времени при той же полезной нагрузке. Такие конструкции и схемы реализуют следующие технические подходы в целях увеличения полетного времени и/или дальности:
2.3.1. соосное расположение (спарка) [10] воздушных винтов в ВМГ;
2.3.2. применение более эффективных электрических двигателей в составе используемых ВМГ;
2.3.3. использование самолетной аэродинамической схемы ЛА;
2.3.4. использование конвертируемой аэродинамической схемы ЛА, совмещающей режим ВВ/П и самолетный режим полета;
2.3.5. комбинация вышеперечисленных путей улучшения ЛТХ ЛА с ВВ/П с электрическими ВМГ.
2.4. Во всех ЛА, использующих электрические ВМГ, в том числе и в перечисленных выше, применяется архитектура ВМГ, при которой электрический двигатель, обеспечивающий крутящий момент на оси воздушного винта, размещается во втулке или вне ее, но на валу такого воздушного винта. При этом, длина рычага, участвующего в создании упомянутого крутящего момента, равна радиусу ротора такого электрического двигателя. В дальнейшем, такая архитектура будет по тексту называться «базовой».
3. Известны конструкции в сфере электрических приводов лопастных винтов:
3.1. Упомянутый в п.2.1.1.2.7, электрический двигатель Siemens SP260D, представляющий собой два концентрических соприкасающихся кольца – внешнее содержит компоненты статора, а внутреннее – компоненты ротора. Статор, при этом, представляет собой кольцо с размещенными на нем радиально ориентированными электромагнитами. Ротор, представляющий собой набор постоянных магнитов, размещенных на внутреннем по отношению к кольцу статора кольце, взаимодействующих с указанными электромагнитами статора, и жестко соединен спицами со ступицей, а через нее с валом, передающим возникающий при таком взаимодействии крутящий момент вращаемому воздушному винту. Радиальные толщины указанных колец существенно меньше длины указанных спиц. Расположение зон возникновения тангенциальной силы взаимодействия магнитных полей компонентов статора и ротора на плече с длиной, близкой длине спицы, имеет целью увеличение крутящего момента, величина которого прямо пропорциональна указанной длине. Недостаток такого решения - плечо приложения указанной тангенциальной силы ограничивается габаритами электрического двигателя.
3.2. Пропульсивная система Соловьева [7], представляющая собой пропульсивную установку, содержащую автономный корпус с электродвигателем, статор которого закреплен к корпусу, а ротор с внутренней стороны имеет как единое целое круговое кольцо (роторное кольцо). При этом к внутренней поверхности такого кругового кольца прикреплены лопасти гребного винта. Вал ротора является одновременно валом гребного винта. Причем вал установлен в подшипниках, размещенных в стойках, закрепленных на корпусе и/или статоре, при этом ступица гребного винта жестко связана с валом ротора. При этом к внутренней поверхности указанного кругового кольца прикреплены лопасти гребного винта. Предполагается применение данной системы как для перемещения жидкости, так и для перемещения газа. Принята за прототип. Недостатки прототипа в случае перемещения массы газа, в частности, воздуха, для создания силы тяги ЛА в качестве реакции на такое перемещение: (i) сложность конструкции роторного кольца, предполагающей изготовление кольца, содержащего элементы ротора, и гребного винта, как единого целого; (ii) потребные частоты вращения воздушных винтов, существенно больше в сравнении с потребными частотами вращения винтов для перемещения жидкости такого же диаметра, что приводит к значительному увеличению центробежных сил, действующих на кольцо ротора, удерживающее магнитные элементы ротора, т.к. величина таких сил зависит от массы указанного роторного кольца, его радиуса и от квадрата частоты его вращения; (iii) жесткое крепление к указанному кольцу лопастей воздушного винта, что влечет за собой использование только воздушных винтов фиксированного шага; (iv) конструкционные ограничения при проектировании электрической ВМГ как пропульсивной системы Соловьева на параметры воздушного винта и их совокупности, в частности, диаметр винта, диапазон допустимых частот его вращения, возможность управления шагом.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей изобретения является повышение эффективности работы электрических ВМГ. Основным параметром, определяющим эффективность воздушного винта, является его КПД. Однако, при некоторых режимах работы винта, таких как работа на месте, в частности на режиме висения ЛА, КПД не является характерной величиной, т.к. предполагает наличие набегающего на ось винта потока. Альтернативным показателем эффективности винта является величина энергетического качества винта, определяемая как отношение максимальной тяги винта к мощности, затрачиваемой на ее создание [8]. Данный показатель измеряется в даН/л.с., где 1 даН = 10 Н, а 1 л.с. = 736 Вт. Для самолетных винтов его значение составляет 1÷1.5 даН/л.с., а для вертолетных достигает 4÷5 даН/л.с..
Технический результат изобретения заключается в увеличении энергетического качества электрической ВМГ, используемого далее по тексту в качестве показателя эффективности ВМГ, величина которого определяется по аналогии с энергетическим качеством воздушного винта как отношение величины силы тяги, создаваемой данной ВМГ, к величине электрической мощности, затраченной данной ВМГ для создания указанной силы тяги. Измеряется указанный показатель, также, в даН/л.с..
Технический результат изобретения достигается применением архитектуры электрического привода воздушного винта, далее именуемой «Топос», состоящей в том, что ВМГ, представляющая собой воздушный винт в кольце [5], как единое целое, является вентильным электрическим двигателем [9], в котором коммутация фаз (секций) обмотки осуществляется системой управления посредством соответствующих электрических импульсов, подаваемых по проводам 8 в зависимости либо от сигналов датчиков положения ротора, либо по ЭДС, возникающей в секциях обмотки 4 при прохождении мимо них элементов 2 ротора, которым в данном решении является воздушный винт 1 указанной ВМГ. Вал указанного воздушного винта закреплен и свободно вращается вокруг собственной оси на подшипниках, жестко соединенных со ступицей - втулкой воздушного винта, которая не содержит электрического двигателя для создания постоянного крутящего момента на указанном валу. При этом, длина рычага, являющаяся компонентой величины крутящего момента на указанном валу, равна радиусу воздушного винта, а не ротора электрического двигателя, расположенного во втулке или вне ее на валу воздушного винта, как в «базовой» архитектуре.
Технический результат достигается упрощением конструкции ВМГ по сравнению с прототипом за счет устранения роторного кольца и вместо него формирования распределенного ротора, состоящего из концевых магнитных элементов, жестко размещенных на законцовках лопастей воздушного винта.
Технический результат достигается тем, что статор 4 такого электрического двигателя размещается в кольце 7, а ротор, в отличие от прототипа, выполнен в виде набора магнитов 2, жестко закрепленных на законцовках лопастей 1 такого воздушного винта. Втулка 5 такого воздушного винта обеспечивает свободное вращение указанного воздушного винта жесткой фиксацией его вала в подшипниках, а также, возможно, управление шагом винта, и, подачу электрического тока элементам ротора на законцовках лопастей винта, если это электромагниты.
Технический результат достигается тем, что электромагниты 4, возможно состоящие из нескольких однофазных обмоток, представляющие собой элементы статора, размещаются внутри кольца 7 воздушного винта. Указанные электромагниты 4 жестко крепятся к кольцу 7. Втулка 5 воздушного винта жестко соединена с кольцом 7 посредством стоек 9 для фиксации положения втулки 5 относительно кольца 7. Количество таких стоек может быть различным. Существенным, при этом является только то, что указанные стойки должны сходиться на центральной оси втулки 5. Возможен вариант независимой жесткой фиксации кольца 7 и втулки 5 ВМГ.
Технический результат достигается тем, что элементы 2 ротора, представляющие собой магниты, в частности, постоянные, размещены и жестко закреплены на законцовках лопастей 1 воздушного винта, имеющего радиус, обеспечивающий наличие воздушного промежутка между статором и ротором, так, чтобы при вращении указанного винта вокруг собственной оси элементы 2 ротора перемещались по окружности, концентрической кольцу 7 вблизи элементов 4 статора без соприкосновения. Величина указанного воздушного промежутка ограничивается сверху условиями максимизации силы взаимодействия магнитных полей элементов 4 статора и ротора 2.
Технический результат достигается тем, что лопасть 1 в качестве рычага 2-го рода, длиной, равной радиусу R данного воздушного винта, под действием тангенциальной силы 3, возникающей при взаимодействии магнитных полей соответствующих элементов статора и ротора, и прикладываемой к элементу ротора 2, размещенному на законцовке i-ой лопасти 1, и равной F0i, создает на втулке 5 крутящий момент M0i, равный M0i=F0i×R. Пусть потребный крутящий момент, прикладываемый ко втулке 5, равен M. Указанный крутящий момент M, при применении архитектуры «Топос» электрического привода воздушного винта, равен M = n×M0i = n×(F0i×R) где n – число лопастей данного воздушного винта, участвующих в его создании в соответствии с алгоритмом, реализуемым устройством управления ВМГ. Через F0 обозначим совокупную силу, равную |n×F0i|. В то же время, при применении базовой архитектуры указанного привода этот же потребный крутящий момент M равен M = F1×r, где F1 – совокупная тангенциальная сила взаимодействия статора и ротора электрического двигателя, размещенного на валу втулки 5 в базовой архитектуре, r – радиус ротора указанного двигателя. Тогда
Сила F, с которой электромагнит притягивает проводник с током, может быть вычислена по формуле

где I – величина электрического тока,
B – величина индукции магнитного поля, в котором находится проводник, по которому течет ток I,
L – длина указанного проводника.
Величина B магнитной индукции может быть вычислена по формуле
где µ - магнитная проницаемость внутри соленоида,
µ0 - магнитная постоянная, равная 4π×10-7
n – число витков на единицу длины обмотки.
Соответственно, силы F0 и F1 равны
где I0 – электрический ток на обмотках статора при архитектуре «Топос» ВМГ, I1 – электрический ток на обмотках статора при базовой архитектуре ВМГ, при прочих равных параметрах элементов статора и ротора по обеим архитектурам для данного воздушного винта. Указанные параметры не зависят от величины тока в обмотке и для целей данного анализа могут быть заменены эквивалентной константой
Для оценки эффекта от замены базовой архитектуры ВМГ на архитектуру «Топос» оценим изменение величины потребного электрического тока, подаваемого на обмотки статоров в указанных архитектурах. Отношение тангенциальных сил, участвующих в создании крутящего момента M, равно
и, следовательно, ток статора ВМГ с архитектурой «Топос», обеспечивающей такой же крутящий момент M, что и ВМГ с базовой архитектурой, при условии равенства параметров, характеризующих элементы статора и полюса ротора, тогда равен
Мощность N, поглощаемую винтом, можно оценить как
где M – потребный крутящий момент на втулке винта, рассмотренный выше, Ω - частота вращения указанного винта.
Тогда имеем

или

Т.о., для обеспечения указанной потребной мощности N на втулке воздушного винта ВМГ в базовой архитектуре с АКБ снимается мощность N1 = N, равная

а в архитектуре «Топос»
где ηэл – КПД электрического двигателя в базовой архитектуре. Считаем, что напряжение U в обоих рассмотренных вариантах одинаково.
Энергетическое качество ВМГ с базовой архитектурой K1 равно

а энергетическое качество ВМГ с архитектурой «Топос» K0 равно

Следовательно,
Изобретение и пример его применения поясняются иллюстрациями:
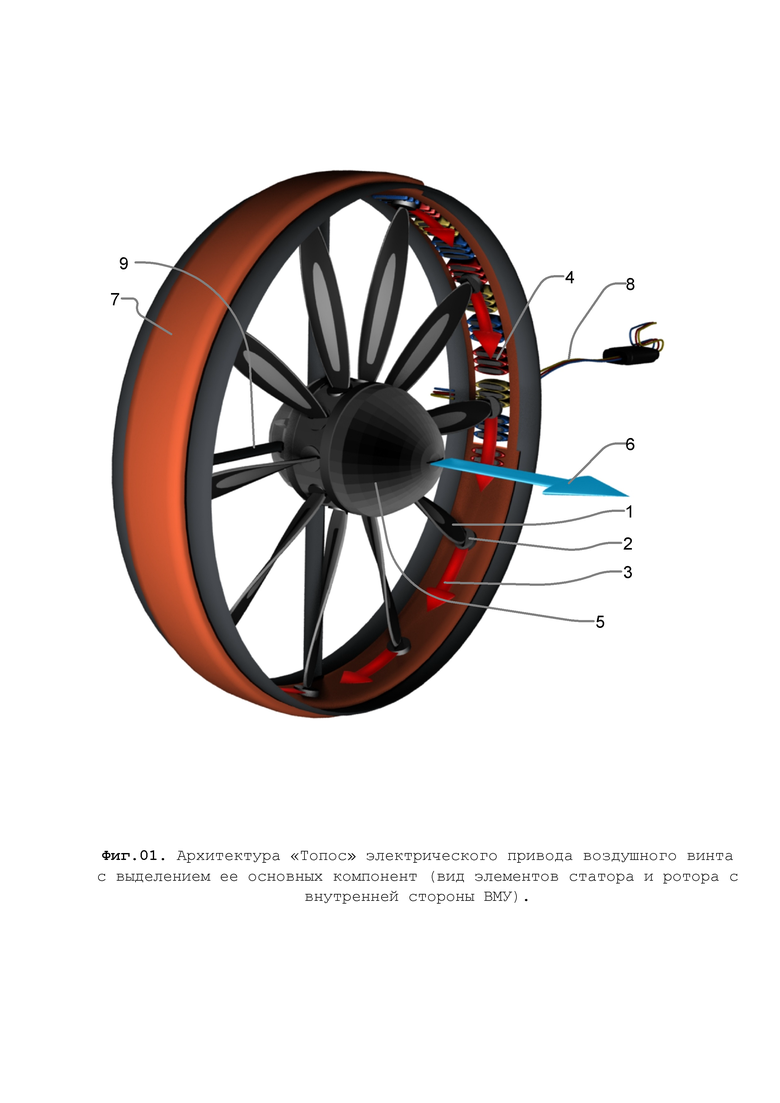
Фиг.01. Архитектура «Топос» электрического привода воздушного винта с выделением ее основных компонент (вид элементов статора и ротора с внутренней стороны ВМГ).
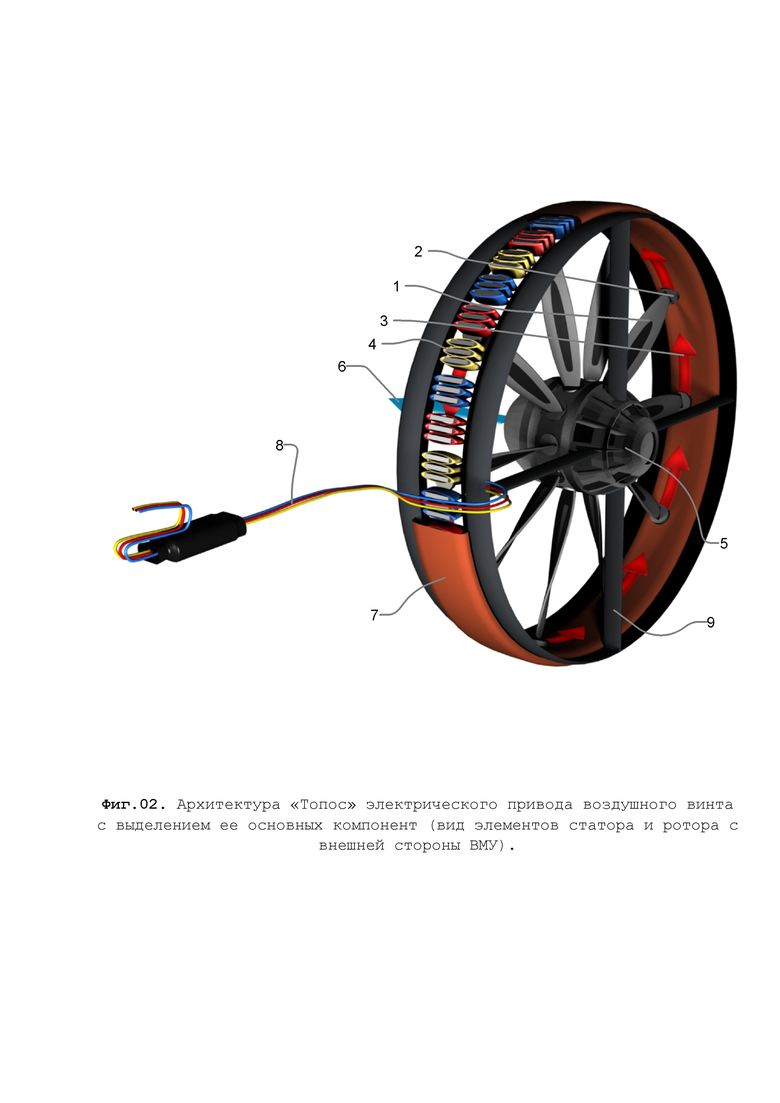
Фиг.02. Архитектура «Топос» электрического привода воздушного винта с выделением ее основных компонент (вид элементов статора и ротора с внешней стороны ВМГ).
Фиг.03. Эскиз грузопассажирского летательного аппарата с вертикальным взлетом и посадкой, основанный на аэродинамическом и проектировочном расчете винтомоторных установок, реализующих архитектуру «Топос» электрического привода воздушного винта (ЛА с ВВ/П «Топос»). За исходные приняты летно-технические характеристики летательного аппарата Airbus CityAirbus (п.2.1.1.2).
Фиг.04. Летательный аппарат с вертикальным взлетом и посадкой «Топос», имеющий ЛТХ летательного аппарата Airbus CityAirbus (п.2.1.1.2), в полете.
На фиг.01 показан общий вид электрической ВМГ с архитектурой «Топос», один из ее вариантов. В качестве условно изображенных через разрез в корпусе кольца 7 элементов статора, сгруппированных по фазам, показаны одноцветные обмотки 4. Обмотки 4 жестко закреплены в кольце 7. Электрическое питание подается по внешним проводам 8 на обмотки 4. Элементы 2 ротора электрического двигателя размещены на законцовках лопастей 1 воздушного винта. Количество лопастей условно, но в любом случае, равное количеству полюсов ротора 2, должно быть четным. Между корпусом кольца 7 и элементами ротора 2 имеется воздушный промежуток. Взаимодействие магнитных полей обмоток 4 и полюсов ротора 2 создает тангенциальную силу 3. Указанная сила прилагается к лопасти 1, которая при этом является рычагом. Такое приложение силы приводит к возникновению крутящего момента на втулке 5 воздушного винта. Указанный крутящий момент приводит во вращение воздушный винт, образованный лопастями 1, результатом которого является сила тяги 6, создаваемая воздушным винтом. Винт, образованный лопастями 1, может иметь изменяемый шаг, управление которым осуществляет устройство, размещаемое во втулке 5. Кольцо 7 жестко соединено с осью вращения втулки 5 посредством радиальных стоек 9 с малым аэродинамическим качеством. Фиг.01 демонстрирует вариант электрической ВМГ с архитектурой «Топос» с внутренней стороны разреза в корпусе кольца 7.
На фиг.02 показан общий вид электрической ВМГ с архитектурой «Топос», один из ее вариантов. Фиг.02 демонстрирует вариант электрической ВМГ с архитектурой «Топос» с внешней стороны разреза в корпусе кольца 7.
На фиг.03 показан эскиз грузопассажирского летательного аппарата с вертикальным взлетом и посадкой, основанный на аэродинамическом и проектировочном расчете ВМГ, реализующих архитектуру «Топос» электрического привода воздушного винта. За исходные приняты летно-технические характеристики летательного аппарата Airbus CityAirbus (п.2.1.1.2). Данный эскиз иллюстрирует пример аэродинамического и проектировочного расчета как электрической ВМГ с архитектурой «Топос», так и ЛА с ВВ/П, приведенный далее. Втулки ВМГ жестко крепятся к фюзеляжу 10 в данном случае посредством консолей с вертикальной ориентацией создаваемого вектора тяги, а воздушные винты указанных ВМГ, при этом, являются несущими. Вместе с тем, электрические ВМГ с архитектурой «Топос» воздушного винта могут использоваться и в качестве тянущих/толкающих, комбинироваться в соосные ВМГ, а также использоваться в аэродинамических конвертируемых схемах с переводом ВМГ из режима несущих в режим тянущих/толкающих и обратно. Шасси данного ЛА представляет собой телескопические стойки 11, вмонтированные во втулки 5 ВМГ. Такое решение позволяет обеспечить большую устойчивость на посадочной площадке данного ЛА по сравнению с аналогом - Airbus CityAirbus. Более того, это позволяет данному ЛА в качестве посадочной площадки, зоны TLOF, использовать участки с углом уклона больше 2%. Указанные стойки при нахождении данного ЛА на посадочной площадке находятся в выдвинутом, нижнем, положении, опираясь подошвами на поверхность посадочной площадки и совокупно обеспечивая его устойчивое положение на стоянке.
На фиг.04 показан летательный аппарат с вертикальным взлетом и посадкой «Топос» в полете. На режиме полета стойки шасси данного ЛА убраны в верхнее положение.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
ВМГ, представляющая собой электрический двигатель, в частности, вентильный 3-х фазный (возможны и другие варианты количества фаз), и реализующая предлагаемую архитектуру «Топос» электрического привода воздушного винта работает следующим образом. Входящее в состав такой винтомоторной группы устройство управления подает электрический ток на обмотки 4 статора таким образом, чтобы при взаимодействии магнитных полей ротора и статора на ступице ротора возникал крутящий момент. Указанное устройство управления на основании показаний датчиков положения магнитов 2, образующих ротор, подает по кабелю 8, изображенному на фиг.01-02 и состоящему из отдельных 3-х проводов, по одному для каждой из 3-х фаз, соответствующие импульсы электрического тока равной амплитуды:
(1) положительный импульс на обмотки 4 фазы «A», в то время как на обмотки фазы «B» - отрицательный, в результате чего ротор сдвигается. Обмотки фазы «C» отключены. При этом, т.к., элементы 2, составляющие ротор, жестко закреплены на законцовках лопастей 1 воздушного винта, а втулка 5 свободно вращается на подшипниках вокруг оси крепления, происходит поворот воздушного винта. Датчики положения фиксируют это движение ротора и устройство управления, на основании этих данных, подаст сигнал для следующей коммутации. Дальнейшая последовательность коммутаций обмоток 4 статора:
(2) фаза «A» отключается, фаза «C» - положительный импульс, фаза «B» - отрицательный импульс;
(3) фаза «B» отключается, фаза «C» - положительный импульс, фаза «A» - отрицательный импульс;
(4) фаза «C» отключается, фаза «B» - положительный импульс, фаза «A» - отрицательный импульс;
(5) фаза «A» отключается, фаза «B» - положительный импульс, фаза «C» - отрицательный импульс;
(6) фаза «B» отключается, фаза «A» - положительный импульс, фаза «C» - отрицательный импульс.
Далее данный цикл коммутаций для обеспечения вращения лопастей 1 воздушного винта повторяется.
Вращение воздушного винта ВМГ с архитектурой «Топос» обеспечивается повторением указанного цикла коммутаций устройством управления. Скорость вращения указанного воздушного винта регулируется длительностью такого цикла.
ПРИМЕР
В качестве примера применения архитектуры «Топос» электрического привода воздушного винта для летательного аппарата вертикального взлета и посадки с летно-техническими характеристиками, близкими к ЛТХ ЛА Airbus CityAirbus (п.2.1.1.2), проведен проектировочный расчет такого ЛА и его ВМГ, эскиз которого приведен на фиг.03-04.
Исходные данные для расчета силовой установки данного ЛА:
a) Тип проектируемого летательного аппарата - вертикального взлета и посадки, грузопассажирский, автономный.
b) Избыток мощности – 40%.
c) Весовые данные
a. Нормальная взлетная масса - 2200 кг., как и у ЛА Airbus CityAirbus.
b. Максимальная взлетная масса - 2200×1.4=3080 кг.
c. Оценка массы пустого ЛА - 660 кг.
d) Количество электрических ВМГ с архитектурой «Топос» равно 8-ми. Указанные ВМГ сгруппированы спарками (верхний и нижний воздушные винты) по соосной схеме с общей втулкой и общим кольцом для каждой пары. Т.е., общее количество ВМГ-спарок равно 4. Винты фиксированного шага.
e) Кольца спарок ВМГ жестко соединены с фюзеляжем.
f) Оси вращения воздушных винтов (и их втулок) всех ВМГ, как и их вектора тяги, параллельны вертикальной оси фюзеляжа ЛА.
g) Шасси представляют собой телескопические стойки с подошвами, размещенные в указанных втулках.
h) Для целей моделирования. Электропитание каждой ВМГ обеспечивается соответствующей бортовой электрической аккумуляторной батареей (АКБ), состоящей из ячеек. В качестве ячейки бортовой АКБ выбрана батарея LiPo 22,000 12S 44.4v Battery Pack [11]. Емкость данной батареи – 22000 mAh, ток разрядки – 22 А в течение 60 мин., напряжение - 44.4 В, вес 5050 гр.
i) Для целей моделирования. Параметры элементов статора/ротора соответствуют данным электрического двигателя KDE700XF-295-G3 [12]. Константа крутящего момента данного двигателя Kt – 0.0324 Н×м/А, Kv – 295 об/мин/В, максимальный рабочий ток – 139 А, максимальная рабочая мощность – 7195 Вт, допустимое напряжение 37.0 ÷ 69.6 В, диаметр – 0.056 м, класс статора – (4541, 7T+8T, YY), обмотки статора – (12-Strand, ∅0.38 мм), полюса магнитов ротора – (10, 12S10P), вес – 0.695 кг.
Расчет верхних и нижних воздушных винтов ВМГ проводился в соответствии с теорией Сабинина - Юрьева, устанавливающей взаимосвязь параметров потока воздуха, размеров и формы лопастей винта и мощности, потребляемой винтом при заданной частоте его вращения. Также, проводился расчет изгибающих и растягивающих нагрузок на лопасти с учетом размещения на их законцовках соответствующих элементов ротора постоянных магнитов. Профиль лопастей выбран ВС-2.
Результаты проектировочного расчета и моделирования ВМГ данного ЛА на режиме висения на высоте 100 м:
I.Результаты проектировочного расчета ВМГ-спарки Topos при максимальной взлетной массе (номинальная + 40%) ЛА.
01.Сила тяги верхнего/нижнего винта P, Н:
-верхний 3775.56;
-нижний 3775.56.
02.Материал лопастей верхнего/нижнего воздушного винта – алюминиевый сплав Д16Т.
03.Количество лопастей верхнего/нижнего воздушного винта – 4.
04.Радиусы воздушных винтов в общем кольце, м:
-верхний 1.466;
-нижний 1.466.
05.Геометрия лопастей верхнего/нижнего воздушного винта на относительных радиусах [0.35; 0.45; 0.55; 0.65; 0.75; 0.85; 0.95] соответственно:
(a).Величины хорд сечений b, м:
-верхний [0.120; 0.126; 0.126; 0.120; 0.109; 0.090; 0.055];
-нижний [0.155; 0.162; 0.162; 0.155; 0.140; 0.116; 0.071].
(b).Толщины профиля лопасти c, см:
-верхний [3.44; 2.93; 2.38; 1.85; 1.39; 0.99; 0.56];
-нижний [4.43; 3.77; 3.06; 2.38; 1.79; 1.27; 0.72].
(c).Углы установки хорд сечений (крутка) лопасти φ, град.:
-верхний [15.14; 12.30; 10.46; 9.18; 8.23; 7.50; 6.93];
-нижний [25.32; 20.53; 17.34; 15.07; 13.37; 12.06; 11.02].
06.Скорость подсасывания верхнего/нижнего винта v1, м/с:
-верхний - 21.47, осевая скорость V0 = 0;
-нижний - 13.27, осевая скорость V0 нижнего винта равна скорости V1 верхнего винта при условии, что расстояние между плоскостями вращения винтов существенно меньше радиуса данных винтов.
07.Частота вращения верхнего/нижнего винта Ω, 1/с:
-верхний - 180;
-нижний - 157.
08.Крутящий момент на втулке верхнего/нижнего винта M, Н×м:
-верхний - 546.64;
-нижний - 933.55.
10.Мощность, поглощаемая верхним/нижним винтом Nп, Вт:
-верхний - 98128;
-нижний - 146642.
11.Вес АКБ, обеспечивающих работу верхней/нижней ВМГ Topos, кг:
-верхняя - 60.6;
-нижняя - 106.05.
12.Величина тока, подаваемого на верхнюю/нижнюю ВМГ Topos со своей АКБ, А:
-верхняя - 66;
-нижняя - 66.
13.Величина напряжения, подаваемого на верхнюю/нижнюю ВМГ Topos со своей АКБ, В:
-верхняя - 44.4;
-нижняя - 44.4.
14.Величина КПД элемента статора/ротора верхней/нижней ВМГ Topos:
-верхняя - 0.957;
-нижняя - 0.957.
15.Мощность, снимаемая верхней/нижней ВМГ Topos со своей АКБ, Вт:
-верхняя - 12248;
-нижняя - 21434.
16.Вес АКБ, обеспечивающего данный режим верхних, нижних винтов, соответственно, и вцелом ЛА, кг:
-верхняя - 242;
-нижняя - 424;
-итого - 666.
17.Энергетическое качество верхней/нижней ВМГ Topos и их спарки, K, даН/л.с.:
-верхняя - 22.987;
-нижняя - 13.135;
-спарка - 16.718.
18.Напряжения от инерционных сил и изгибающего момента лопастей – меньше допустимых для выбранного материала.
19.Взлетная масса на данном режиме, кг: 3080.
20.Максимальная полезная нагрузка на данном режиме, кг: 1753.
21.Время полета на данном режиме, мин.: 60.
II.Результаты моделирования спроектированного ЛА (п.I) и, в частности, ВМГ-спарки Topos этого ЛА при номинальной взлетной массе 2200 кг на режиме висения на высоте 100 м.
01.Сила тяги верхнего/нижнего винта P, Н:
-верхний - 2697;
-нижний - 2697.
02.Скорость подсасывания верхнего/нижнего винта v1, м/с:
-верхний - 18.14, осевая скорость V0 = 0;
-нижний - 11.21, осевая скорость V0 нижнего винта равна скорости V1 верхнего винта при условии, что расстояние между плоскостями вращения винтов существенно меньше радиуса данных винтов.
03.Частота вращения верхнего/нижнего винта Ω, 1/с:
-верхний - 152;
-нижний - 133.
04.Крутящий момент на втулке верхнего/нижнего винта M, Н×м:
-верхний - 462;
-нижний - 789.
05.Мощность, поглощаемая верхним/нижним винтом ВМУ Nп, Вт:
-верхний - 70092;
-нижний - 104743.
06.Величина тока, подаваемого на верхнюю/нижнюю ВМГ Topos со своей АКБ, А:
-верхняя - 54.47;
-нижняя - 53.16.
07.Величина напряжения, подаваемого на верхнюю/нижнюю ВМГ Topos со своей АКБ, В: - 44.4.
08.Величина КПД статора/ротора верхней/нижней ВМГ Topos:
-верхняя - 0.958;
-нижняя - 0.958.
09.Мощность, расходуемая АКБ верхней/нижней ВМГ Topos, Вт:
-верхняя - 10096;
-нижняя - 17242.
10.Энергетическое качество верхней/нижней ВМГ Topos и их спарки, K, даН/л.с.:
-верхняя - 19.919;
-нижняя - 11.664;
-спарка - 14.712.
11.Напряжения от инерционных сил и изгибающего момента лопастей – меньше допустимых для выбранного материала.
12.Взлетная масса, кг: 2200.
13.Номинальная полезная нагрузка на данном режиме, кг: 873.
14.Время полета на данном режиме, мин.: 72.
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ ИНФОРМАЦИИ
1) https://www.airbus.com/helicopters.html.
2) https://www.airbus-sv.com/projects/1/.
3) https://www.siemens.com/press/en/feature/2015/corporate/2015-03-electromotor.php.
4) https://www.uber.com/cz/ru/elevate/uberair/.
5) ГОСТ 21664-76, ВИНТЫ ВОЗДУШНЫЕ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ.
6) https://www.rolls-royce.com/media/our-stories/discover/2018/blue-sky-thinking-rr-unveils-evtol-concept-at-farnborough-airshow.aspx.
7) Патент РФ №2326021, публ. 2008 г.
8) Обуховский, А.Д. Аэродинамика воздушного винта: учебное пособие / А.Д.Обуховский. - Новосибирск: Изд-во НГТУ, 2009. - 80 с.
9) Овчинников, И.Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность) / И.Е.Овчинников: Курс лекций. - СПб.: КОРОНА-Век , 2006. - 336 с. : ил.
10) Юрьев, Б.Н. Избранные труды. Том 1. Воздушные винты. Вертолеты / Б.Н.Юрьев – Москва: Издательство АН СССР, 1961. – 553 с. : ил.
11) https://www.maxamps.com/lipo-22000-12s-44-4v-battery-pack.
12) https://www.kdedirect.com/products/kde700xf-295-g3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВАЯ БИРОТАТИВНАЯ ЭЛЕКТРИЧЕСКАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2024 |
|
RU2830255C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |
| Летательный аппарат | 2021 |
|
RU2770513C2 |
| УСТРОЙСТВО ВОЗДУШНОГО ОХЛАЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2021 |
|
RU2756842C1 |

Изобретение относится к области авиации, в частности к конструкциям приводов вращения воздушных винтов. Электрический привод воздушного винта содержит профилированное кольцо, воздушный винт в кольце, втулку, удерживающую воздушный винт, вал, на котором размещена указанная свободно вращающаяся втулка, стойки, жестко фиксирующие взаимное расположение кольца и втулки. Привод выполнен в виде вентильного электрического двигателя, имеющего статор, секции обмотки которого размещены внутри указанного кольца, полюса распределенного ротора, расположенные на законцовках лопастей указанного воздушного винта, датчики положения указанных полюсов, систему управления. Обеспечивается повышение энергетического качества электрической винтомоторной группы. 2 з.п. ф-лы, 4 ил.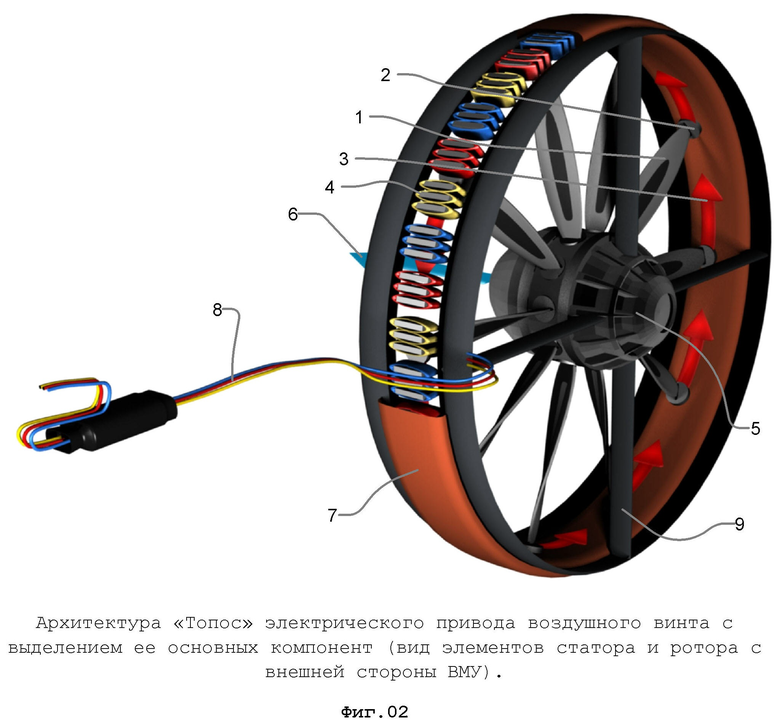
1. Электрический привод воздушного винта, содержащего профилированное кольцо, воздушный винт в кольце, втулку, удерживающую воздушный винт, вал, на котором размещена указанная свободно вращающаяся втулка, стойки, жестко фиксирующие взаимное расположение кольца и втулки, отличающийся тем, что выполнен в виде вентильного электрического двигателя, имеющего статор, секции обмотки которого размещены внутри указанного кольца, полюса распределенного ротора, расположенные на законцовках лопастей указанного воздушного винта, датчики положения указанных полюсов, систему управления.
2. Электрический привод воздушного винта по п.1, отличающийся тем, что силы взаимодействия магнитных полей соответствующих секций указанного статора и полюсов указанного распределенного ротора, приложенные к законцовкам указанных лопастей, создают крутящий момент на указанной втулке, обеспечивая вращение указанного воздушного винта.
3. Электрический привод воздушного винта по п.1, отличающийся тем, что указанные лопасти используются в качестве рычага 2-го рода длиной, равной радиусу указанного воздушного винта, для создания указанного крутящего момента.
| Лопастный электромагнитный движитель | 2017 |
|
RU2649838C1 |
| СПОСОБ СООРУЖЕНИЯ ТОННЕЛЕЙ | 1934 |
|
SU47321A1 |
| US 20110147511 A1, 23.06.2011 | |||
| US 9758245 B2, 12.09.2017 | |||
| КОНВЕРТОПЛАН | 2012 |
|
RU2589212C2 |

