Заявляемая группа изобретений относится к области железнодорожного транспорта, а именно к железнодорожной автоматике и телемеханике, и может быть использована для управления закрытием автоматической переездной сигнализации с помощью локомотивной аппаратуры.
Из предшествующего уровня техники известно устройство управления железнодорожным переездом с использованием радиоканала, содержащее блок управления, информационные входы и выходы которого соединены с CAN-интерфейсом, к которому подключен интерфейс объектов железнодорожного переезда, к которому подключены блок заградительного светофора, блок автомобильных светофоров, приводы шлагбаумов и приводы устройств заграждения пути, радиомодем, соединенный через интерфейс с CAN-интерфейсом, при этом в него введен блок вычисления длины участка извещения, включающий последовательно соединенные модуль ввода данных, модуль проверки данных, модуль формирования команд и преобразователь форматов, причем вход модуля ввода данных и выход преобразователя форматов соединены через CAN-интерфейс соответственно с выходом и входом блока управления (патент № 2519607 на изобретение «Устройство управления движением поездов на железнодорожном переезде с использованием радиоканала», дата подачи 25.12.2012 г., опубликовано 20.06.2014 г.).
Известна система автоматической переездной сигнализации, состоящая из участков извещения, переездных светофоров, автоматических шлагбаумов, щитков управления, релейной аппаратуры, установленной в релейном шкафу, источников питания (Виноградова В.Ю. «Перегонные системы автоматики»: учебник/ Москва, 2005. – 292 с., стр. 139).
Недостатки указанных технических решений обусловлены тем, что при управлении автоматической переездной сигнализацией не учитывается длина тормозного пути приближающегося к переезду поезда, при этом не обеспечивается контроль за исправностью аппаратуры и своевременным закрытием переезда. Помимо этого, у данных решений отсутствуют возможности определения нахождения, в том числе вынужденного, объекта на переезде. Длина участка извещения фиксирована и рассчитывается только на основе максимальной, а не фактической, скорости движения поезда на участке извещения. При движении поезда со скоростью, меньшей чем максимальная, пропорциально увеличивается время простоя автотранспорта у закрытого переезда.
Известно, что скорость движения различных типов поездов имеет значительный разброс, поэтому в случае прохождения скоростного поезда и для обеспечения его тормозного пути, требуется увеличение длины такого пути, что, в свою очередь, ведет к продлению ожидания открытия переезда.
Кроме того, известны система и способ взаимодействия переездной аппаратуры с подвижными рельсовыми единицами, при котором локомотив, находясь в зоне ответственности, передает на переезд информацию о допустимой и фактической скорости движения, типе и номере локомотива, координате пути. На основании полученных данных переездная аппаратура выполняет расчет времени закрытия переезда, который закрывается после контроля расстояния до подвижной единицы или с учетом скорости ее движения, при этом зоной ответственности переезда считают участок пути по обе стороны переезда, длина которого рассчитывается следующим образом:
ℓ изв. = Тсвязи х Vмакс + максимальное значение {ℓизв,ℓторм, ℓавар}, где
ℓизв – длина участка извещения поезда, движущегося с максимальной скоростью Vмакс;
ℓторм - длина участка служебного торможения подвижной единицы при снижении скорости от максимальной до 20 км/ч;
ℓавар –длина участка полного служебного торможения подвижной единицы при снижении скорости от максимальной до остановки;
Тсвязи- максимальное время на установление связи и обмен информацией между бортовыми устройствами и локомотивом.
Известный способ заключается в том, что бортовые устройства локомотива при входе в зону ответственности устанавливают канал связи с соответствующими стационарными устройствами, после чего локомотив передает на переезд информацию о допустимой и фактической скоростях движения, типе и номере локомотива, его координате, после чего получает от стационарных устройств подтверждение готовности к закрытию переезда или информацию об аварийной ситуации на нем. При готовности переезда к закрытию на основании полученных данных переездная аппаратура информирует об этом с помощью индикации, разрешая движение с установленной скоростью. В случае поступления информации о неисправности переездных устройств, локомотивная аппаратура контролирует снижение скорости локомотива до 20 км/ч при подходе к перезду. При получении данных об аварии на переезде локомотивные устройства контролируют снижение скорости до полной остановки (В.И. Зорин, И.М. Кравец, И.И. Алабушев статья «Автоматическая переездная сигнализация с радиоканалом», ж. «Автоматика, связь, информатика», № 5, 2007 г., стр. 8-9).
Наиболее близким техническим решением к заявляемому изобретению является система удаленного контроля и информирования машиниста о занятости железнодорожного переезда, содержащая установленные на переезде видеокамеры, первое устройство приема-передачи радиосигнала, связанное с устройством формирования сигнала тревоги и видеокадра, и размещенное на локомотиве второе устройство приема-передачи радиосигнала, подключенное к управляющему контроллеру, видеомонитору, запоминающему устройству и тревожным сигнализаторам, причем снабжена средством определения занятости переезда, предназначенным для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру, подключенным к видеокамерам и первому устройству приема-передачи радиосигнала, а управляющий контроллер подключен к средству, осуществляющему расчет тормозных кривых, и выполнен с возможностью формирования сигнала запроса информации о наличии объекта на переезде при приближении на заданное время хода к точке начала полного служебного или экстренного торможения перед ближайшим переездом, при этом средство определения занятости переезда выполнено с возможностью формирования сигнала о наличии объекта на переезде при получении указанного запроса. При этом в качестве средства расчета тормозных кривых используют соответствующее средство, связанное со средством определения скорости локомотива, текущей координаты, даты и времени, и модулем хранения характеристик локомотива и поезда, причем указанные средства входят в имеющиеся на борту локомотива системы автоведения поезда, или системы управления торможением, или системы обеспечения безопасности. В качестве второго устройства приема-передачи радиосигнала используют соответствующие устройства, входящие в имеющиеся на борту локомотива системы автоведения поезда или системы обеспечения безопасности.
Занятость переезда определяют путем видеонаблюдения за контролируемой областью с анализом видеоизображения на соответствие заданным образам и размерам (автомобиль, автоприцеп, мотоцикл, бетонная плита и т.п.), несущими потенциальную опасность при столкновении. Тревожный сигнал формируется переездной аппаратурой в случае нахождения в контролируемой зоне объекта с заданным размером и образом и передается на борт локомотива и на сервер управления движением в сопровождении видеоизображения, что позволяет машинисту объективно оценить ситуацию и заблаговременно начать (или не начинать) торможение поезда. Сообщение о занятости переезда передается на борт локомотива по каналам сети GSM/GPRS адресно по запросу, формируемому локомотивной аппаратурой за время, достаточное для того, чтобы данный конкретный поезд, движущийся с текущей скоростью, при применении заданного типа торможения мог гарантированно остановиться перед занятым переездом. Видеоизображение передается постоянно до тех пор, пока переездная аппаратура фиксирует состояние «переезд занят» архивируется и фиксируется в запоминающих устройствах на борту локомотива и сервера управления движением. Расчет тормозных кривых и определение момента запроса состояния переезда может производиться автономными устройствами на борту локомотива с использованием электронной карты пути или штатными вычислителями систем автоведения поезда или систем обеспечения безопасности движения. Передача запроса на состояние переезда и прием тревожного сигнала в сопровождении видеоизображения может производиться автономными устройствами на борту локомотива или штатными устройствами систем автоведения поезда или систем обеспечения безопасности движения. Торможение перед занятым переездом по полученному тревожному сигналу может осуществляться машинистом в ручном режиме или автоматизированной системой управления торможением, интегрированной с системой автоведения поезда и системой обеспечения безопасности движения (патент № 2667035 на изобретение «Система удаленного контроля и информирования машиниста о занятости железнодорожного переезда», дата подачи 17.05.2017 г., опубликовано 13.09.2018 г.).
Недостатки данной системы связаны с отсутствием возможности автоматического управления переездной сигнализацией в зависимости от характеристик поезда и его фактической скорости движения, а также отсутствие проверки закрытия переезда при формировании сигнала запроса локомотивной аппаратуры о наличии объекта на переезде.
Технический результат, на достижение которого направлено предлагаемое к защите изобретение, заключается в снижении вероятности столкновения подвижного состава железнодорожного транспорта с находящимся, в том числе вынужденно, на переезде объектом, сокращение времени простоя автотранспорта на переезде и, как следствие, повышение пропускной способности автомобильных дорог.
Указанный технический результат достигается тем, что система управления автоматической переездной сигнализацией, включает связанные через радиоканал локомотивную и переездную аппаратуру, при этом локомотивная аппаратура содержит вычислительный комплекс с хранящимися в нем электронной картой пути локомотива и его техническими характеристиками, к которому подключены датчики контролируемого параметра в виде датчика давления в тормозной магистрали и датчика пройденного пути и фактической скорости, а также модуль ввода для задания технических характеристик локомотива, устройство управления тормозами, средство визуализации информации, и первое устройство цифровой передачи данных по радиоканалу, а переездная аппаратура включает автоматическую переездную сигнализацию, к которой подключены второе устройство цифровой передачи данных через радиоканал и средство определения свободности переезда, согласно изобретению переездная аппаратура дополнительно содержит схемы увязки, через которые реализовано соединение выходов второго устройства цифровой передачи данных по радиоканалу с входами автоматической переездной сигнализации, выходов средств определения свободности переезда с входами второго устройства цифровой передачи данных, а также выходов автоматической переездной сигнализации со вторым устройством цифровой передачи данных.
Способ управления автоматической переездной сигнализацией, осуществляемый с применением указанной системы, заключается в том, что через радиоканал устанавливают связь между локомотивной и переездной аппаратурами, по электронной карте пути и показаниям датчика пройденного пути и фактической скорости локомотива определяют расстояние между локомотивом и переездом, производят расчет тормозного пути локомотива с учетом его типа и технических характеристик и вычисляют координату нахождения локомотива в соответствии со следующим математическим выражением
S1 = S2 + 0,278 (v0tзакр. + v0tпров. + v0tобм.),
где
S1 – координата пути для передачи команды на закрытие переезда;
S2 – длина тормозного пути;
v0 - фактическая скорость движения поезда;
tзакр. – время закрытия переезда;
tпров. - время проверки свободности закрытого переезда;
tобм. – время, необходимое для обмена данными между локомотивной и переездной аппаратурами;
0,278 – коэффициент перевода размерности км/ч в размерность м/с.
при достижении которой с локомотивной аппаратуры направляют команду на закрытие переезда, которое выполняют при приближении локомотива к переезду, после закрытия переезда подают запрос о проверке свободности уже закрытого переезда, и в зависимости от ответа, полученного с переездной аппаратуры, локомотивная аппаратура подает команду или на ограничение скорости до полной остановки локомотива перед переездом, или на продолжение его движения без снижения скорости и прохождения переезда без остановки.
Заявляемое изобретение поясняется чертежами, где
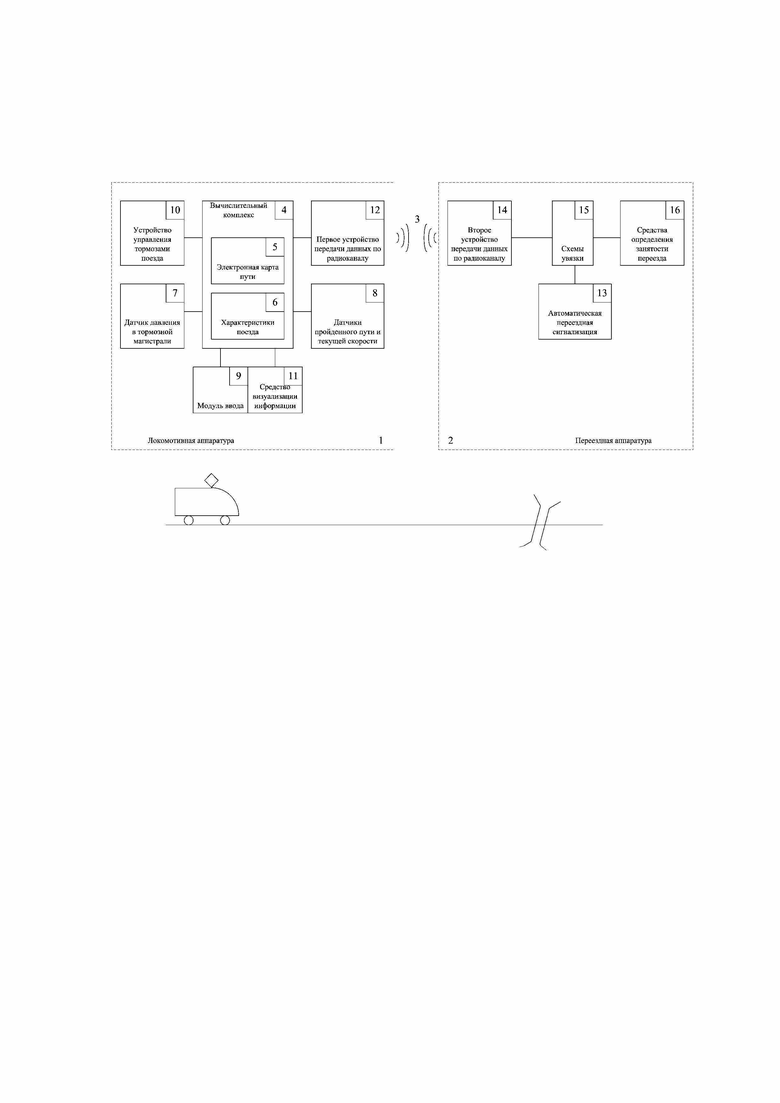
Чертеж – блок-схема системы управления автоматической переездной сигнализацией.
Заявляемая система управления автоматической переездной сигнализацией состоит из локомотивной 1 и переездной аппаратуры 2, взаимосвязь между которыми реализована через радиоканал 3.
Преимуществами использования радиосвязи являются гибкость и точность передачи и воспроизведения даже сложных высокоточных сигналов, используемых в современных беспроводных системах, а также скорость и дальность передачи данных, при этом не требуется прямая линия видимости.
Локомотивная аппаратура 1 содержит вычислительный комплекс 4, в запоминающем устройстве которого хранятся электронная карта пути 5 и характеристики 6 поезда. К входам вычислительного комплекса 4 подключены датчики контролируемого параметра, а именно датчик давления в тормозной магистрали 7, датчик пройденного пути и текущей скорости 8, а также модуль ввода 9, служащий для задания характеристик поезда. К выходам вычислительного комплекса 4 присоединены устройство управления тормозами поезда 10, средство визуализации информации 11 и первое устройство цифровой передачи данных 12 по радиоканалу 3.
Переездная аппаратура 2 состоит из автоматической переездной сигнализации 13, включающей участки извещения, переездные светофоры, автоматические шлагбаумы, шитки управления, релейную аппаратуру, размещенную в распределительном шкафу, источники питания, второе устройство цифровой передачи данных 14 по радиоканалу 3. К автоматической переездной сигнализации через схемы увязки 15 подключены выходы второго устройства цифровой передачи данных 14 и средства определения занятости переезда 16 в виде ультразвуковых датчиков, систем технического зрения, радаров, лидаров, либо комплексов, состоящих из этих средств, благодаря чему обеспечивается возможность передачи на локомотивную аппаратуру сообщения о свободности переезда объектом (-ами) только в случае закрытия переезда и управления закрытием переезда по сигналам, полученным от локомотивной аппаратуры.
Схемы увязки представляют собой промышленный компьютер и подключенные к нему устройства для безопасного управления электромагнитными реле автоматической переездной сигнализации.
Изобретение осуществляется следующим образом.
При приближении локомотива к переезду через радиоканал 3 устанавливается сеанс связи между локомотивной 1 и переездной 2 аппаратурами. По данным электронной карты пути 5 вычислительный комплекс 4 определяет координаты ближайшего переезда (S1) и по показателям, полученным с датчика пройденного пути и фактической (текущей) скорости 8, с учетом действительного тормозного коэффициента и фактической (текущей) скорости движения вычисляет тормозной путь (S2) локомотива. При этом действительный тормозной коэффициент вычисляется на основании накопленных и обработанных показаний датчика давления в тормозной магистрали 7 с учетом характеристик локомотива 6, которые хранятся в памяти вычислительного комплекса 4 и введены с помощью модуля ввода 9. Фактическая скорость локомотива определяется по показателям, полученным с датчика пройденного пути и текущей скорости 8.
Известно, что в грузовых и пассажирских поездах чаще применяется одна ступень служебного торможения, реже – две с последующим отпуском. Если после второй ступени торможения не получен тормозной эффект, то применяют экстренное торможение.Полное служебное торможение выполняют в исключительных случаях при необходимости остановки поезда или снижения его скорости на более коротком расстоянии, чем при выполнении ступенчатого торможения.
После вычисления тормозного пути вычислительный комплекс 4 рассчитывает координату передачи команды на закрытие переезда, при этом длина тормозного пути увеличивается на величину расстояния, проходимого локомотивом за время, необходимое для закрытия переезда, проверки свободности закрытого переезда и обмена данными между локомотивной и переездной аппаратурой при фактической скорости движущегося локомотива.
Вычисление координаты передачи команды на закрытие переезда производят в соответствии со следующим математическим выражением:
S1 = S2 + 0,278 (v0tзакр. + v0tпров. + v0tобм.) (1),
где
S1 – координата пути для передачи команды на закрытие переезда;
S2 – длина тормозного пути;
v0 - фактическая скорость движения поезда;
tзакр. – время закрытия переезда;
tпров. - время проверки свободности закрытого переезда;
tобм. – время, необходимое для обмена данными между локомотивной и переездной аппаратурами;
0,278 – коэффициент перевода размерности км/ч в размерность м/с.
При этом время закрытия переезда согласно существующим методикам расчета принимается равным 15 с.
Время определение занятости переезда соответствует времени срабатывания датчиков и распространению сигналов.
Время обмена данными зависит от конкретного стандарта и длины сообщения.
После установления связи между локомотивной и переездной аппаратурами вычислительный комплекс 4 в сответствии с показаниями датчика пройденного пути и фактической (текущей) скорости локомотива и данными электронной карты пути 5 непрерывно определяет оставшееся до переезда расстояние, которое отображается на средстве визуализации информации 11. При достижении локомотивом координаты передачи команды на закрытие переезда вычислительный комплекс 4 формирует соответствующий сигнал и по радиоканалу 3 через первое устройство цифровой передачи данных 12 передает его второму устройству цифровой передачи данных 14. Полученная вторым устройством цифровой передачи данных 14 команда с его выхода через схему увязки 15 поступает на автоматическую переездную сигнализацию 13, которая, в свою очередь, через заданный временной промежуток закрывает переезд.
Подключение выхода второго устройства цифровой передачи данных 14 через схему увязки 15 к автоматической перездной сигнализации 13 обеспечивает возможность закрытия переезда по команде, поступающей с локомотивной аппаратуры, причем данная команда формируется с учетом данных о фактической скорости движения локомотива на конкретном участке пути (участке извещения) и его технических характеристик. Благодаря этому создаются условия, при которых величина тормозного пути будет равна расстоянию между локомотивом и переездом, что надежно гарантирует остановку локомотива перед занятым объектом и закрытым переездом и уменьшает путь локомотива от вычисленной координаты до переезда до минимальных значений. При этом снижается вероятность столкновения на переезде, а также сокращается время его закрытия.
Схемы увязки 15 позволяют определить момент закрытия переезда и только после этого подключают средства определения занятости переезда 16 и по результатам их работы формируют сообщение о свободности или занятости переезда. Таким образом, свободность переезда проверяется только при его закрытом состоянии. Сформированное сообщение поступает на второе устройство цифровой передачи данных 16, затем по радиоканалу на первое устройство цифровой передачи данный 12 и затем в вычислительный комплекс 4.
В случае получения сообщения о том, что переезд свободен, локомотив проследует без ограничения скорости движения.
При получении сообщения о загруженности переезда вычислительный комплекс 4 через устройство управления тормозами 10 передает сигнал на тормоза локомотива и торможением останавливает поезд перед переездом.
Условия передачи от локомотивной аппаратуры на переездную аппаратуру команды p1 – «закрытие переезда» можно сформулировать следующим образом. Когда расстояние между локомотивом и переездом не превышает расстояния между переездом и вычисленной координатой начала участка извещения S1, следует передать команду p1, иначе эту команду передавать не следует. Формально данное условие можно записать в виде системы:

где  – координата переезда;
– координата переезда;  – фактическая координата локомотива.
– фактическая координата локомотива.
Пример расчета координаты, передачи команды на закрытие перезда
Предположим, что к переезду приближается локоотив с фактической скоростью 70 км/ч. Переезд имеет линейную координату в электронной карте участка Sп = 10760 м. Прогнозируемый тормозной путь поезда, определенный локомотивной аппаратурой по известной формуле (2), составляет S2 = 680 м. Время закрытия переезда равно tзакр. = 15 с; время проверки свободности закрытого переезда tпров. = 2 с; время, необходимое для обмена данными между локомотивной и переездной аппаратурами tобм. = 3 с. Согласно математического выражения (1) локомотивная аппаратура определяет координату:
S1 = S2 + 0,278 (70 * 15 + 70 * 2 + 70 * 3) = 680 + 390 = 1070 м
Команда на закрытие переезда должна быть передана, когда фактическая коорддината поезда будет равна Sп – S1 = 10760 – 1070 = 9690 м.
Техническая реализация локомотивной аппаратуры возможна на существующих бортовых локомотивных комплексах КЛУБ-У, БЛОК, БЛОК-М, переездная аппаратура может быть реализована на основе существующей системы автоматической переездной сигнализации, дополненной средствами определения занятости переезда (ультразвуковыми датчиками, системами технического зрения, радарами, лидарами, либо комплексами этих средств) и устройством цифровой передачи данных.
Заявляемая группа изобретений обеспечивает гарантированное определение свободности переезда, в том числе вынужденного, при этом его закрытие осуществляется на основании данных о фактической скорости движения приближающегося локомотива, его типе и технических характеристик, что позволяет приравнять тормозной путь к расстоянию между локомотивом и переездом, сокращая время на ожидание открытия переезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ СВОБОДНОСТИ ЗОНЫ ПЕРЕЕЗДА | 2020 |
|
RU2751041C1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491199C1 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА | 2012 |
|
RU2519607C1 |
| Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами | 2018 |
|
RU2696046C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| УСТРОЙСТВО МИКРОПРОЦЕССОРНОЙ АВТОБЛОКИРОВКИ | 2007 |
|
RU2354574C2 |
Изобретение относится к средствам управления автоматической переездной сигнализацией с помощью локомотивной аппаратуры. В способе через радиоканал устанавливают связь между локомотивной и переездной аппаратурами, по электронной карте пути и показаниям датчика пройденного пути и фактической скорости локомотива определяют расстояние между локомотивом и переездом, производят расчет тормозного пути локомотива с учетом его типа и технических характеристик, вычисляют координату нахождения локомотива в соответствии со следующим математическим выражением: S1 = S2 + 0,278 (v0tзакр. + v0tпров. + v0tобм.), где S1 – координата пути для передачи команды на закрытие переезда; S2 – длина тормозного пути; v0 - фактическая скорость движения поезда; tзакр. – время закрытия переезда; tпров. - время проверки свободности закрытого переезда; tобм. – время, необходимое для обмена данными между локомотивной и переездной аппаратурами; 0,278 – коэффициент перевода размерности км/ч в размерность м/с. При достижении указанной координаты с локомотивной аппаратуры направляют команду на закрытие переезда, которое выполняют при приближении локомотива к переезду, после закрытия переезда подают запрос о проверке свободности уже закрытого переезда, в зависимости от ответа, полученного с переездной аппаратуры, локомотивная аппаратура подает команду на ограничение скорости до полной остановки локомотива перед переездом или на продолжение его движения без снижения скорости и прохождения переезда без остановки. Достигается повышение надежности предотвращения столкновения подвижного состава с находящимся на переезде объектом. 2 н. и 1 з.п. ф-лы, 1 ил.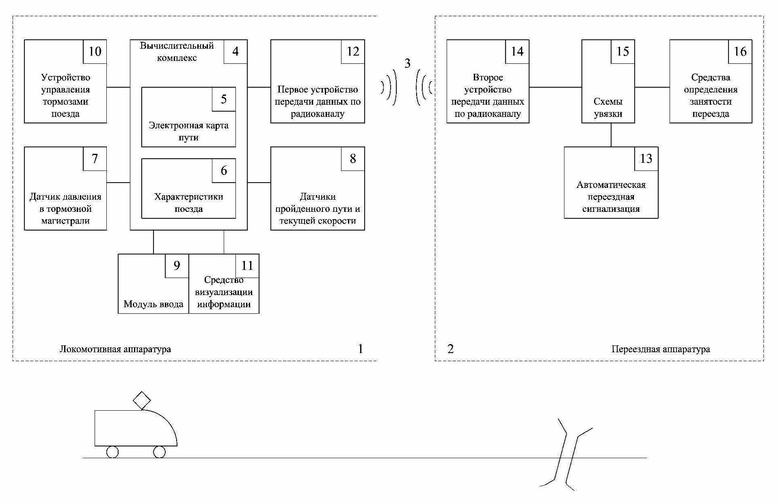
1. Система управления автоматической переездной сигнализацией, включающая связанные через радиоканал локомотивную и переездную аппаратуры, при этом локомотивная аппаратура содержит вычислительный комплекс с хранящимися в нем электронной картой пути локомотива и его техническими характеристиками, к которому подключены датчики контролируемого параметра в виде датчика давления в тормозной магистрали и датчика пройденного пути и фактической скорости, а также модуль ввода для задания технических характеристик локомотива, устройство управления тормозами, средство визуализации информации, и первое устройство цифровой передачи данных по радиоканалу, а переездная аппаратура включает автоматическую переездную сигнализацию, к которой подключены второе устройство цифровой передачи данных через радиоканал и средство определения свободности переезда, отличающаяся тем, что переездная аппаратура дополнительно содержит схемы увязки, через которые реализовано соединение выходов второго устройства цифровой передачи данных по радиоканалу с входами автоматической переездной сигнализации, выходов средств определения свободности переезда с входами второго устройства цифровой передачи данных, а также выходов автоматической переездной сигнализации со вторым устройством цифровой передачи данных.
2. Система по п. 1, в которой схемы увязки включают промышленный компьютер и подключенные к нему устройства для безопасного управления электромагнитными реле автоматической переездной сигнализации.
3. Способ управления автоматической переездной сигнализацией, осуществляемый с применением системы по п. 1 или 2, заключающийся в том, что через радиоканал устанавливают связь между локомотивной и переездной аппаратурами, по электронной карте пути и показаниям датчика пройденного пути и фактической скорости локомотива определяют расстояние между локомотивом и переездом, производят расчет тормозного пути локомотива с учетом его типа и технических характеристик и вычисляют координату нахождения локомотива в соответствии со следующим математическим выражением:
S1 = S2 + 0,278 (v0tзакр. + v0tпров. + v0tобм.),
где
S1 – координата пути на участке извещения для передачи команды на закрытие переезда;
S2 – длина тормозного пути;
v0 - фактическая скорость движения поезда;
tзакр. – время закрытия переезда;
tпров. - время проверки свободности закрытого переезда;
tобм. – время, необходимое для обмена данными между локомотивной и переездной аппаратурами;
0,278 – коэффициент перевода размерности км/ч в размерность м/с,
при достижении которой с локомотивной аппаратуры направляют команду на закрытие переезда, которое выполняют при приближении локомотива к переезду, после закрытия переезда подают запрос о проверке свободности уже закрытого переезда, и в зависимости от ответа, полученного с переездной аппаратуры, локомотивная аппаратура подает команду или на ограничение скорости до полной остановки локомотива перед переездом, или на продолжение его движения без снижения скорости и прохождения переезда без остановки.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА | 2012 |
|
RU2519607C1 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| Камера горения для турбин внутреннего горения | 1934 |
|
SU43521A1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| US 9150229 B2, 06.10.2015. | |||

