Область техники
[01] Настоящее изобретение в целом относится к области применения сельскохозяйственных методик и способов проведения работ, в частности, к особому режиму работы автоматической системы для реализации способа посева. Данное изобретение обеспечивает существенную экономию семян при посеве с учетом эффективности и оптимизации, предотвращая, таким образом, потери семян и убытки фермерских хозяйств.
[02] Фактически, цель данного изобретения заключается в обеспечении особого режима работы автоматической системы для реализации способа посева, тщательно разработанной для выполнения уникального нового процесса, отличающегося от предшествующего уровня техники в данной области.
Предшествующий уровень техники
[03] По данным о предшествующем уровне техники в данной области известно, что сразу после посева, выполненного сельскохозяйственными орудиями (например, сеялкой), для борьбы с вредителями и/или сорняками было необходимо прохождение второго сельскохозяйственного орудия (например, опрыскивателя, разбрасывателя) под углом к данному предварительно засеянному участку, что приводило к его повреждению и снижению эффективности посева в фермерском хозяйстве, поскольку эти повреждения приводили к нарушению всхода семян и их гибели, принося убытки фермерскому хозяйству.
[04] Также известно, что ранее в данной области техники вместо движения данного орудия под углом к ранее засеянному участку во избежание потерь в результате повреждения семян второе орудие
двигалось параллельно между ранее засеянными рядками так, чтобы не прилагать нежелательного давления колес орудия на ранее засеянные рядки.
[05] Хотя теоретически такое решение - движение параллельно ранее засеянным рядкам, известное в данной области техники как контролируемое движение техники по полю - буквально считалось «спасением урожая», на практике этого не происходило, поскольку второе используемое сельскохозяйственное орудие (опрыскиватель, разбрасыватель и т.д.) часто выполняет неуместные маневры с учетом рельефа поверхности, на которой оно работает, стремясь следовать как по рядкам, засеиваемым в настоящий момент, так и по ранее засеянным рядкам, что приводит к нежелательному повреждению семян.
[06] Эта практика, называемая контролируемым движением техники по полю (параллельным движением), также встречает ряд препятствий, затрудняющих ее применение, например, организация рядков, посев на изогнутых участках, ухабистых участках, специальная регулировка каждого орудия, которое будет работать в поле, и т.д.
[07] Помимо указанных аспектов, это непреднамеренное отклонение второго сельскохозяйственного орудия от траектории может привести к повреждению уже взошедших посевов, поскольку растения располагаются в линию параллельно движению колес второго орудия или колее параллельно движущегося орудия.
[08] С учетом предшествующего уровня техники в данной области наблюдается недостаток методик посева, гарантирующих целостность предыдущих посевов и взошедших семян при движении второго сельскохозяйственного орудия в обычном порядке.
[09] В результате проведенного поиска в данной области техники не было найдено никаких патентных документов и/или патентов, касающихся, в частности, задач автоматической системы для реализации способа посева, которая является предметом настоящего изобретения.
Новизна и цель изобретения
[10] В связи с вышесказанным цель настоящего изобретения заключается в создании особого режима работы автоматической системы для реализации способа посева, который решит технические вопросы известного уровня техники в данной отрасли, обеспечивая исключительную эффективность посева, при этом не повреждая ранее засеянные и уже взошедшие семена, что могло бы произойти при движении второго орудия по изначально возделанной посевной площади, что в результате обеспечивает повышение прибыли фермерского хозяйства.
[11] Цель заключается в создании особого режима работы автоматической системы для реализации способа посева, которая обеспечит экономию семян при посеве, глубину их посева на данных известных участках, по которым будет двигаться второе орудие.
[12] Цель заключается в создании особого режима работы автоматической системы для реализации способа посева, которая обеспечит непрерывное движение второго орудия под углом, поскольку участки, по которым оно будет проходить, не будут засеяны, что исключит ненужные маневры и препятствия для параллельного движения (контролируемое движение), обеспечивая повышенное удобство и качество при движении второго орудия с учетом его повышенной устойчивости к колебаниям, вызванным бороздами и остатками предыдущих посевов.
[13] Цели настоящего изобретения полностью достигаются за счет особого режима работы автоматической системы для реализации способа посева, который предусматривает в основном и главным образом создание карты маршрута или траектории движения второго орудия при выполнении им предпосевных работ таким образом, что первое орудие при посеве не будет помещать семена на участок, по которому будет двигаться второе орудие после посева при выполнении послепосевных работ.
Описание чертежей
[14] Для иллюстрации и разъяснения сущности настоящего изобретения вне зависимости от особого режима работы автоматической системы для реализации способа посева, в соответствии с идеей настоящего изобретения и основной и предпочтительной формой его осуществления, предусмотренной заявителем, прилагаются чертежи, входящие в состав заявки и являющиеся обоснованием ее описательной части.
[15] Прежде всего важно выделить, что:
[16] На рис. 01-05 представлены указанные проблемы, связанные с известными методиками;
[17] На рис. 06-13 представлены основные особенности реализуемой методики посева; и
[18] На рис. 14 и 15 представлен особый режим работы автоматической системы для реализации способа посева, являющейся предметом настоящего изобретения в соответствии со следующим подробным описанием.
[19] Таким образом:
[20] На рис. 01 представлен вид сверху площади, возделанной первым орудием (сеялкой), при этом второе орудие проводит дополнительные работы после посева, двигаясь под углом к возделываемым рядкам, при этом «А» - это путь движения второго орудия по возделываемой посевной площади с повреждением семян;
[21] На рис. 02 представлен вид сверху участка, возделанного первым орудием (сеялкой), при этом второе орудие проводит дополнительные работы после посева, двигаясь перпендикулярно возделываемым рядкам, при этом «В» - это путь движения второго орудия по возделываемой посевной площади с повреждением семян;
[22] На рис. 03 представлен вид сверху площади, возделанной первым орудием (сеялкой), при этом второе орудие проводит дополнительные работы после посева, двигаясь параллельно
возделываемым рядкам, при этом «С» - это путь движения второго орудия по возделываемой посевной площади с повреждением семян;
[23] На рис. 04 представлен вид сбоку второго орудия, работающего как показано на предыдущем чертеже, при этом видно параллельное или контролируемое движение с повреждением посевов, вызванным при прохождении машины по уже взошедшим растениям, при этом они повреждаются и нарушается их рост;
[24] На рис. 05 представлены варианты «А», «В» и «С», соответственно чертежам 01, 02 и 03, на которых повреждение посевов обусловлено применением обычных известных технических методов;
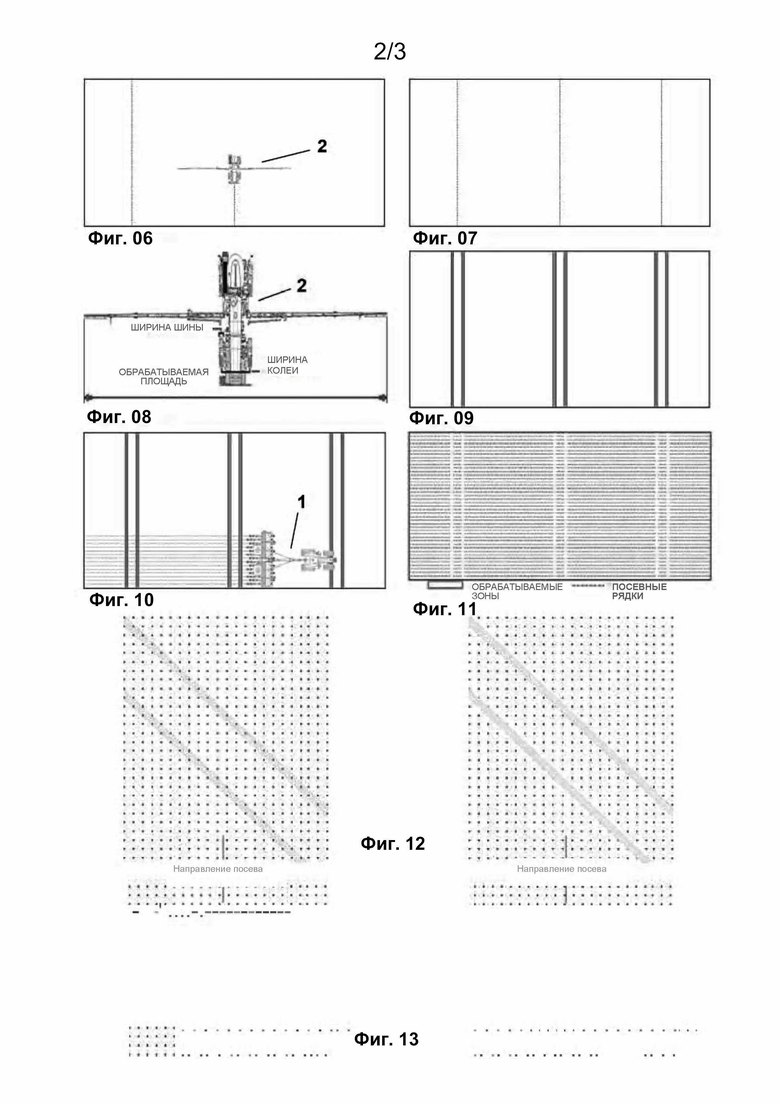
[25] На рис. 06 представлен вид сверху возделываемой площади, где показано орудие, выполняющее предпосевные работы, при этом его траектория контролируется и регистрируется для создания карты рядков, в соответствии с автоматической системой для реализации способа посева, заявленной в настоящем изобретении;
[26] На рис. 07 представлен вид сверху возделываемой площади, где показана карта рядков обрабатываемой площади, в соответствии с автоматической системой для реализации способа посева, являющейся предметом настоящего изобретения;
[27] На рис. 08 представлен вид сверху орудия, используемого для проведения предпосевных работ, где показаны его основные особенности - ширина шин, ширина колеи, обрабатываемая площадь - для создания карты необрабатываемой или незасеиваемой площади, которую должна соблюдать сеялка, в соответствии с автоматической системой для реализации способа посева, заявленной в настоящем изобретении;
[28] На рис. 09 представлено схематичное изображение карты необработанных участков (темные участки) и засеиваемых участков (светлые участки) готовых к использованию, составленной по методике, являющейся предметом настоящего изобретения;
[29] На рис. 10 представлено схематичное изображение карты необработанных участков (темные участки) и засеиваемых участков (светлая область), где показана сеялка, выполняющая свои посевные работы, соблюдая при этом схему засеиваемых рядков (пунктирные линии) и незасеиваемых мест на необработанных участках, что представляет собой применение сеялки, работающей по карте, в которой имеются необрабатываемые участки, в соответствии со способом, заявленным в настоящем изобретении;
[30] На рис. 11 представлено схематичное изображение карты необработанных участков (незаштрихованный участок) и посевных рядков (пунктирные линии) в соответствии с подписью к рисунку, где показана карта участков, уже обработанных сеялкой и, следовательно, готовых к движению второй машины без повреждения семян в соответствии со способом, заявленным в настоящем изобретении;
[31] На рис. 12 представлено два схематичных изображения возделываемых посевных площадей, при этом на рисунке слева показано повреждение, возникающее при использовании обычного способа, применяемого до настоящего момента, а на рисунке справа - отсутствие повреждений в результате применения автоматической системы для реализации способа посева, являющейся предметом настоящего изобретения, при этом на обоих рисунках показано движение по диагонали по возделываемым рядкам;
[32] На рис. 13 представлено два схематичных изображения возделываемых посевных площадей, при этом на рисунке слева показано повреждение, возникающее при использовании обычного способа, применяемого до настоящего момента, а на рисунке справа - отсутствие повреждений в результате применения автоматической системы для реализации способа посева, являющегося предметом настоящего изобретения, при этом на обоих рисунках показано движение перпендикулярно возделываемым рядкам;
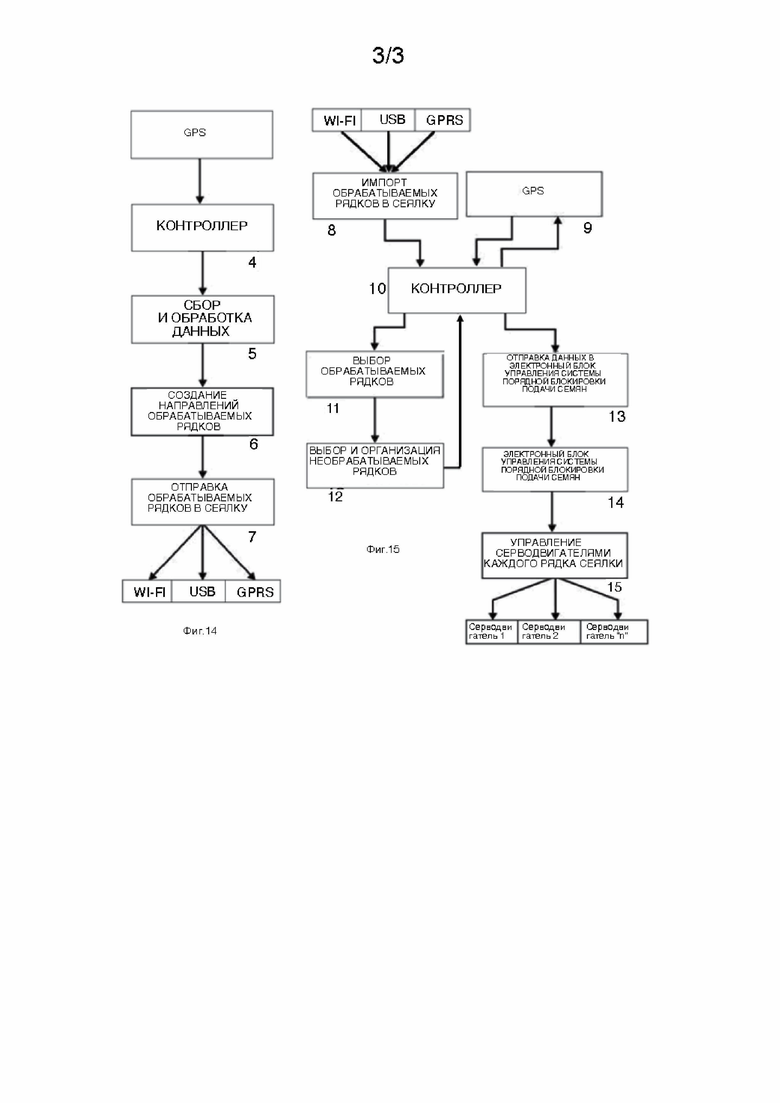
[33] На рис. 14 представлена технологическая карта, или блок-схема, особого режима работы автоматической системы для реализации способа посева, заявленного в настоящем изобретении, а точнее, ее подсистемы создания карты пройденного пути орудия (2), выполняющего предпосевные работы;
[34] На рис. 15 представлена технологическая карта, или блок-схема, особого режима работы автоматической системы для реализации способа посева, заявленного в настоящем изобретении, а точнее, ее подсистемы создания карты необработанных или незасеянных участков, используемой сельскохозяйственным посевным орудием (1).
Предпочтительный вариант осуществления изобретения
[35] Как видно из прилагаемых чертежей, особый режим работы автоматической системы для реализации способа посева, заявленного в настоящем изобретении, заключается в автоматическом создании карт засеиваемых и незасеиваемых участков, применяемых сельскохозяйственным посевным орудием (1) с индивидуальной блокировкой подачи семян на посевных рядках. Эти карты основаны на том, что второе сельскохозяйственное орудие (2), которое проводит предварительные предпосевные работы, а также последующие послепосевные работы, включает следующее:
[36] - подсистема создания карты пути, пройденного орудием (2) при проведении предпосевных предварительных работ, в состав которой входит модуль GPS (3), отвечающий за прием сигналов точного географического положения машины с помощью антенны и спутников; модуль контроллера (4), отвечающий за управление основными функциями машины, а именно, регистрацией и сохранением, автоматически и мгновенно, данных, предоставленных модулем GPS (3); модуль сбора и обработки данных (5), в котором работает алгоритм, управляемый контроллером (4), и который отвечает за сбор и хранение координат маршрутов, пройденных сельскохозяйственной машиной (2); модуль создания направлений обрабатываемых рядков (6), отвечающий за создание карты обрабатываемых рядков после сбора и обработки данных, которая будет отправляться контроллеру сеялки с помощью соответствующего алгоритма специальной настройки необрабатываемых рядков; и модуль, отправляющий информацию об обрабатываемых рядках сеялке (7), которая будет передавать по Wi-Fi эти данные в контроллер или алгоритм организации рядков путем экспорта через USB или GPRS; и
[37] - подсистема создания карты необрабатываемых или незасеиваемых участков, используемой сеялкой (1), в состав которой входит модуль импорта обрабатываемых рядков в сеялку (8), который будет принимать данные от контроллера или алгоритма организации рядков по Wi-Fi путем экспорта через USB или GPRS от другого контроллера (10), расположенного на сельскохозяйственном орудии (1); модуль GPS (9), отвечающий за прием сигналов о точном географическом положении машины с помощью антенны и спутников; модуль контроллера (10), отвечающий за управление основными функциями машины, в т.ч. импортом и организацией обрабатываемых рядков, превращением их в необрабатываемые рядки; модуль выбора обрабатываемых рядков (11), отвечающий за выбор необрабатываемых рядков, которые будут созданы; модуль анализа и организации необрабатываемых рядков (12), использующий импортируемые рядки и вводящий параметры орудия, прошедшего предпосевную траекторию (2), он позволяет найти точное положение колес орудия (2); модуль, отправляющий данные в электронный блок управления системы порядной блокировки подачи семян (13), отвечающий за отправку, после соответствующей корректировки обрабатываемых рядков, данных о необработанных участках в электронный блок управления системы порядной блокировки подачи семян; электронный блок управления системой порядной блокировки подачи семян (14), отвечающий за прием данных от модуля контроллера (10) и работающий от рядных серводвигателей, которые прерывают подачу семян в каждом рядке сеялки при движении по созданным необрабатываемым рядкам, и модуль управления серводвигателями каждого рядка сеялки (15), отвечающий за прерывание и возобновление подачи семян с помощью серводвигателей 1, 2, «n» сеялки (1).
[38] Модуль контроллера (4), расположенный на тракторе, буксирующем сельскохозяйственное орудие (2), принимает данные о пути, пройденном сельскохозяйственным орудием (2), с помощью приемника GPS, при этом полученные данные сохраняются в энергонезависимой памяти, предусмотренной в данном модуле контроллера (4).
[39] В модуле контроллера (4) уже имеется информация о местонахождении машины, полученная от приемника GPS (3), расположенного на тракторе, буксирующем сельскохозяйственное орудие (2), при этом единственное отличие заключается в том, что эти данные будут сохраняться в энергонезависимой памяти, позволяя отслеживать траектории, пройденные сельскохозяйственным орудием (2).
[40] Отслеживание будет осуществляться через спутник, приемник и антенну, подключенную к модулю контроллера (4).
[41] Карта, созданная при движении орудия (2), будет представлять собой карту отслеживания, содержащую информацию о месте, где проходило сельскохозяйственное орудие (2).
[42] Передача этой созданной «карты» (файла) для анализа сеялкой будет осуществляться модулем контроллера (4), в котором уже имеется соединение GPRS и Wi-Fi, при этом данные технологии могут использоваться для отправки этих файлов в другой контроллер, кроме того, эти файлы могут экспортироваться во флэш-память (USB) и импортироваться в контроллер, который будет использовать эти данные.
[43] Прием данной «карты» сеялкой (1) будет осуществляться модулем контроллера (10), в котором уже имеется соединение GPRS и Wi-Fi, при этом данные технологии могут использоваться для приема файлов от другого контроллера, кроме того, эти файлы могут импортироваться из флэш-памяти (USB).
[44] В соответствии с принятыми данными можно увеличивать такие параметры, как скорость, размер или ширина сельскохозяйственного орудия или трактора, который его буксирует, которые точно моделируют траекторию, пройденную машиной (2), и, зная местоположение этой траектории и ее ширину, создаются необрабатываемые рядки, что позволяет сеялке (1) блокировать внесение семян при движении в этих местах, предотвращая, таким образом, потерю семян, а, следовательно, повреждение растений, которое могло бы произойти в этих местах при отсутствии такой системы блокировки.
[45] На незасеиваемых участках во избежание внесения семян будет применяться система порядной блокировки подачи семян, где серводвигатель каждого рядка машины будет управлять подачей семян, не позволяя семенам попасть на землю.
[46] Контроллер (10) может импортировать готовую карту с необрабатываемыми рядками, которая будет корректироваться внешним ПО, или после импорта рядков регулятора (4) параметры будут корректироваться непосредственно модулем контроллера (10) сеялки (1).
[47] При правильной настройке необрабатываемых рядков модуль контроллера (10) будет точно знать их положение с помощью модуля GPS (9), а при движении по этим местам данный модуль контроллера (10) «предупреждает» электронный блок управления системой порядной блокировки подачи семян (14), который будет действовать на серводвигатель рядка или рядков при движении по данному рядку, блокируя, таким образом, подачу семян, что исключит будущее повреждение этих растений в момент последующего движения орудия (2) по этому же участку.
[48] Как видно из данной заявки, способ, заявленный в настоящем изобретении, можно использовать для других работ, помимо посева, с обеспечением такой же эффективности и преимуществ.
[49] Цели настоящего изобретения полностью достигнуты, в особенности для исключения посева семян на пути движения пред- и послепосевных орудий, что предотвращает их повреждение и обеспечивает чрезвычайную эффективность посева в соответствии с требованиями настоящего изобретения.
[50] Таким образом, настоящее изобретение, особый режим работы автоматической системы реализации способа посева с особенностями, подтверждаемыми проведенным анализом, прилагаемые чертежи и инновационные технические особенности по сравнению со всеми системами, существующими на предшествующем уровне техники в данной отрасли, и данная модель заслуживают официальной защиты в связи с их новизной, изобретательским уровнем и промышленной применимостью.
[51] В следующем списке приведены числовые ссылки на фиг. 14 и 15 к настоящему изобретению:
4) Контроллер: аппаратное обеспечение
5) Сбор и обработка данных: программное обеспечение
6) Создание направлений обрабатываемых рядков: программное обеспечение
7) Отправка обрабатываемых рядков в сеялку: программное обеспечение
Wi-Fi: аппаратное обеспечение
USB: аппаратное обеспечение
GPRS: аппаратное обеспечение
8) Импорт обрабатываемых рядков в сеялку: программное обеспечение
9) GPS: аппаратное обеспечение
10) Контроллер: аппаратное обеспечение
11) Выбор обрабатываемых рядков: программное обеспечение
12) Выбор и организация необрабатываемых рядков: программное обеспечение
13) Отправка данных в электронный блок управления системы порядной блокировки подачи семян: программное обеспечение
14) Электронный блок управления системы порядной блокировки подачи семян: программное обеспечение
15) Управление серводвигателями каждого рядка сеялки: программное обеспечение
Сервопривод 1: аппаратное обеспечение
Сервопривод 2: аппаратное обеспечение
Сервопривод n: аппаратное обеспечение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСЕВА | 2018 |
|
RU2741803C1 |
| СПОСОБ И СИСТЕМЫ ИСПОЛЬЗОВАНИЯ КОЭФФИЦИЕНТА ЗАПОЛНЕНИЯ ИМПУЛЬСОВ ДАТЧИКОВ ДЛЯ ОПРЕДЕЛЕНИЯ РАСХОДА СЕМЯН ИЛИ ЧАСТИЦ | 2020 |
|
RU2816548C2 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ | 2022 |
|
RU2787894C1 |
| Способ полосного посева семян трав в дернину и сеялка для его осуществления | 2016 |
|
RU2641073C2 |
| АГРЕГАТ ДЛЯ ПОСЕВА СЕМЯН | 2011 |
|
RU2476053C2 |
| СПОСОБ И УСТРОЙСТВО ДИФФЕРЕНЦИРОВАННОГО ПРИПОСЕВНОГО ВНЕСЕНИЯ ОСНОВНЫХ И СТАРТОВЫХ ДОЗ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2010 |
|
RU2452167C1 |
| СИСТЕМЫ, СПОСОБЫ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ И МОНИТОРИНГА МНОГОРЯДНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2016 |
|
RU2736277C2 |
| Способ возделывания шалфея испанского | 2023 |
|
RU2822778C1 |
| ПОЧВООБРАБАТЫВАЮЩЕ-ПОСЕВНОЙ КОМПЛЕКС | 2005 |
|
RU2289232C2 |
| СПОСОБ ВНЕСЕНИЯ МАТЕРИАЛА В СЕЛЬСКОХОЗЯЙСТВЕННОЕ ПОЛЕ | 2010 |
|
RU2550077C2 |

Настоящее изобретение в целом относится к области применения сельскохозяйственных методик и способов проведения работ, в частности, к особому режиму работы автоматической системы для реализации способа посева. Изобретение предусматривает автоматическое создание карт засеиваемых и незасеваемых участков, по которым проходит сеялка (1), с индивидуальной блокировкой подачи семян на посевных рядках, причем данные карты строятся с учетом предварительных работ, проводимых вторым сельскохозяйственным орудием (2), которое осуществляет предпосевные и послепосевные работы; изобретение включает подсистему создания карты траектории движения орудия (2) при проведении предварительных предпосевных работ и подсистему создания карты необрабатываемых или незасеваемых участков, используемой сеялкой (1) и вторым орудием (2) при проведении послепосевных работ. Технический результат заключается в создании особого режима работы автоматической системы для реализации способа посева, который предусматривает создание карты маршрута или траектории движения второго орудия при выполнении им предпосевных работ таким образом, что первое орудие при посеве не будет помещать семена на участок, по которому будет двигаться второе орудие после посева при выполнении послепосевных работ. 2 н. и 11 з.п. ф-лы, 15 ил.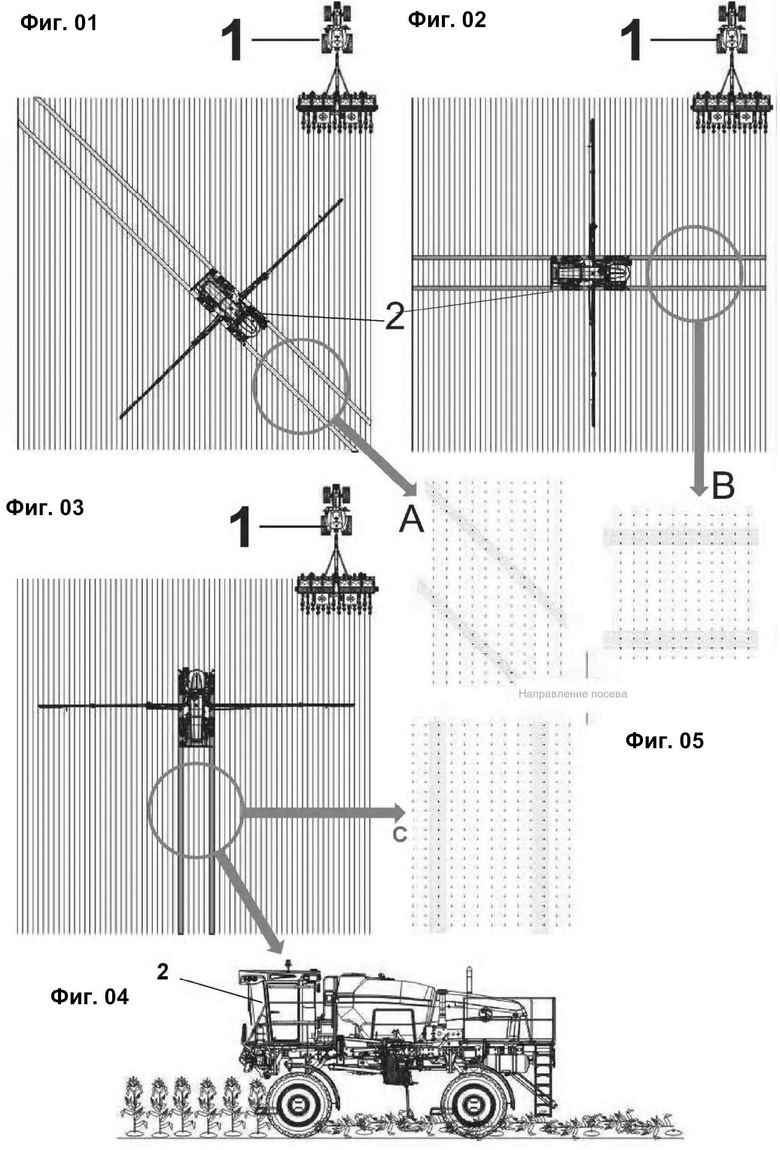
1. Автоматическая система реализации способа посева семян, отличающаяся тем, что она автоматически создает карты засеиваемых и незасеиваемых участков, используемые сельскохозяйственным посевным орудием (1), с индивидуальной порядной блокировкой посева, при этом такие карты основаны на предварительных работах, проведенных вторым сельскохозяйственным орудием (2), осуществляющим предпосевные работы и последующие послепосевные работы, причем система включает следующее:
- подсистема создания карты пути, пройденного орудием (2) при проведении предпосевных предварительных работ, в состав которой входит модуль GPS (3), отвечающий за прием сигналов точного географического положения машины с помощью антенны и спутников; модуль контроллера (4), отвечающий за управление основными функциями машины, а именно регистрацией и сохранением данных, предоставленных модулем GPS (3); модуль сбора и обработки данных (5), в котором работает алгоритм, управляемый модулем контроллера (4), и который отвечает за сбор и хранение координат маршрутов, пройденных сельскохозяйственной машиной (2); модуль создания направлений обрабатываемых рядков (6), отвечающий за создание карты обрабатываемых рядков после сбора и обработки данных, которые будут отправляться контроллеру сеялки с помощью соответствующего алгоритма специальной настройки необрабатываемых рядков; и модуль, отправляющий информацию об обрабатываемых рядках сеялке (7), которая будет передавать по Wi-Fi эти данные в контроллер или алгоритм организации рядков путем экспорта через USB или GPRS; и
- подсистема создания карты необрабатываемых или незасеиваемых участков, используемой сеялкой (1), включающая модуль импорта обрабатываемых рядков в сеялку (8), который будет принимать данные от контроллера или алгоритма организации рядков по Wi-Fi от другого модуля контроллера путем экспорта через USB или GPRS от другого модуля контроллера (10), расположенного на сельскохозяйственном орудии (1); модуль GPS (9), отвечающий за прием сигналов о точном географическом положении машины с помощью антенны и спутников; модуль контроллера (10), отвечающий за управление основными функциями машины, в т.ч. импортом и организацией обрабатываемых рядков, превращением их в необрабатываемые рядки; модуль выбора обрабатываемых рядков (11), отвечающий за выбор создаваемых необрабатываемых рядков; модуль анализа и организации необрабатываемых рядков (12), использующий импортируемые рядки и вводящий параметры орудия, прошедшего предпосевную траекторию (2), он позволяет найти точное положение колес данного орудия (2); модуль, отправляющий данные в электронный блок управления системы порядной блокировки подачи семян (13), отвечающий за отправку, после соответствующей корректировки обрабатываемых рядков, данных о необработанных участках в электронный блок управления системы порядной блокировки подачи семян; электронный блок управления системы порядной подачи семян (14), отвечающий за прием данных от контроллера (10) и работающий от рядных серводвигателей, которые прерывают подачу семян в каждом рядке сеялки при движении по созданным необрабатываемым рядкам, и модуль управления серводвигателями каждого рядка сеялки (15), отвечающий за прерывание и возобновление подачи семян с помощью серводвигателей 1, 2, «n» сеялки (1).
2. Автоматическая система реализации способа посева семян по п. 1, отличающаяся тем, что модуль контроллера (4) расположен на тракторе, буксирующем сельскохозяйственное орудие (2), и содержит приемник GPS, причем полученные данные о траектории хранятся в энергонезависимой памяти, предусмотренной в модуле контроллера (4).
3. Автоматическая система реализации способа посева семян по п. 1 и 2, отличающаяся тем, что модуль GPS (3) расположен на тракторе, буксирующем сельскохозяйственное орудие (2), и отслеживается через спутник с помощью приемника и антенны, подключенной к модулю контроллера (4).
4. Автоматическая система реализации способа посева семян по пп. 1-3, отличающаяся тем, что модуль контроллера (4) создает карту движения орудия (2) по данным о местоположении, полученным от модуля GPS (3) сельскохозяйственного орудия (2).
5. Автоматическая система реализации способа посева семян по пп. 1-4, отличающаяся тем, что модуль контроллера (4) имеет соединение GPRS и Wi-Fi для отправки созданных карт в другой контроллер (10), расположенный на сельскохозяйственном орудии (1), или экспортирует их во флэш-память (USB) для импорта их в контроллер (10) сельскохозяйственного орудия (1), который будет использовать эти данные.
6. Автоматическая система реализации способа посева семян по пп. 1-5, отличающаяся тем, что модуль контроллера (10) сельскохозяйственного орудия (1) увеличивает параметры для карт, полученных от контроллера (4), чтобы они могли точно моделировать траекторию движения сельскохозяйственного орудия (2); создает необрабатываемые рядки по местоположению и ширине сельскохозяйственного орудия (2); и блокирует рядки внесения семян сельскохозяйственного орудия (1), когда оно движется по созданным необрабатываемым рядкам.
7. Автоматическая система реализации способа посева семян по пп. 1-6, отличающаяся тем, что модуль контроллера (10) имеет в своем составе модуль отправки (13), отправляющий данные о созданных обрабатываемых и необрабатываемых рядках в электронный блок управления (14), который управляет порядной блокировкой сельскохозяйственного орудия (1), при этом серводвигатель каждого рядка сельскохозяйственного орудия (1) будет управлять подачей семян.
8. Автоматическая система реализации способа посева семян по п. 1, отличающаяся тем, что модуль контроллера (10) может импортировать карту, в которой уже находятся необрабатываемые рядки, которые будут регулироваться внешним ПО.
9. Автоматическая система реализации способа посева семян по пп. 1-8, отличающаяся тем, что модуль контроллера (10) сельскохозяйственного орудия (1) на основании данных о местоположении, полученных из модуля GPS (9), управляет электронным блоком управления системой порядной подачи семян (14), который будет воздействовать на серводвигатель рядка или рядков при движении по незасеиваемому рядку, обеспечивая блокировку подачи семян в рядке или рядках сельскохозяйственного орудия (1), что позволит исключить будущее повреждение этих растений в момент последующего движения данного сельскохозяйственного орудия (2) по этому же участку.
10. Способ посева семян, отличающийся процессом автоматического создания карт засеиваемых и незасеиваемых участков, используемых сельскохозяйственным посевным орудием (1), с индивидуальной порядной блокировкой посева, причем такие карты основаны на предварительных работах, проведенных вторым сельскохозяйственным орудием (2), осуществляющим предпосевные работы и последующие послепосевные работы, причем способ содержит:
- автоматическое мгновенное сохранение с помощью соответствующих средств и во время предпосевных работ траектории движения колес второго орудия (2), с созданием в конце рядка карты, которая будет использоваться для разработки, с помощью алгоритма обработки собранных данных, карты с незасеиваемыми участками, которая будет использоваться при посевных работах, проводимых сеялкой (1);
- создание и запись карты рядков на основании данных о географическом положении и с учетом параметров скорости, используемых орудием (2), а также координат географического положения, полученных с помощью соответствующих связанных с ним средств, например антенны;
- ввод параметров, используемых для разработки карты рядков с помощью соответствующего алгоритма обработки этих данных, преимущественно расположенного в модуле управления и обработки, находящемся на орудии (2);
- хранение этой созданной карты рядков в энергонезависимой памяти, что делает возможным отслеживание траекторий, пройденных сельскохозяйственным орудием (2), и последующее использование их сеялкой (1);
- передача и ввод файла, содержащего созданную карту рядков, в модуль управления и обработки данных, предусмотренный в сеялке (1);
- обработка определенных параметров орудия, прошедшего по создаваемой траектории по карте рядков, которая вместе с этой созданной картой рядков соответствующим образом обрабатывается специальным алгоритмом для обработки этих данных, создавая карту с незасеиваемыми и засеиваемыми участками, которая будет использоваться сеялкой (1);
- создание карты с участками или местами, где прошло орудие (2), которая будет предупреждать о тех участках, которые не будут засеиваться;
- индивидуальное исключение посевных рядков с блокировкой подачи семян при достижении сеялкой (1) таких незасеиваемых участков и с возвратом посадки семян, если эти участки перекрываются;
- проведение послепосевных работ, выполняемых орудием (2), причем параметры работ определены в процессе создания указанной карты незасеиваемых рядков с учетом движения по той же траектории по карте, созданной при проведении предпосевных работ, без повреждения семян и уже взошедших растений.
11. Способ посева семян по п. 10, включающий определение параметров для орудия (2), прошедшего предпосевную траекторию, представляющих собой ширину колеи, ширину шин и площадь обработки, которые вместе с созданной картой рядков после соответствующей обработки образуют карту необрабатываемых и обрабатываемых или засеиваемых и незасеиваемых участков, которая будет использоваться сеялкой (1).
12. Способ посева семян по п. 11, включающий создание карты необрабатываемых участков, которая предоставляется для загрузки в соответствующий модуль управления сельскохозяйственным орудием (1) и используется в посевных работах.
13. Способ посева семян по п. 10, включающий также возможность импорта карты необрабатываемых участков из внешних устройств или удаленных средств для корректировки внешними средствами обработки данных с целью создания карты необрабатываемых участков, а также экспорта карты во внешнее запоминающее устройство или через удаленные средства в модуль управления сеялкой (1), которая будет выполнять работы на необрабатываемых и обрабатываемых или засеиваемых и незасеиваемых участках, в соответствующем порядке.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 6236924 B1, 22.05.2001 | |||
| БАРЖЕ-БУКСИРНЫЙ СОСТАВ - БУНКЕРОВЩИК | 2013 |
|
RU2532218C1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ ПРОПАШНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2008 |
|
RU2400038C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ СИГНАЛА ОПЕРАТОРУ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ, ЧТО СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ ПРОХОДИТ ЗАСЕЯННУЮ ОБЛАСТЬ | 2011 |
|
RU2579489C2 |

