Предложенное на рассмотрение изобретение относится к системе видеонаблюдения и к способу поддержания системы «ассистент водителя» или автономного вождения транспортного средства и, в частности, к расположению камер для замены обычных зеркал на грузовых транспортных средствах.
Постоянное совершенствование технологии видеосенсоров и возможностей визуального отображения позволяет всё чаще заменять известные приборы косвенного визуального отображения в транспортных средствах. Так, вместо традиционных зеркал, всё чаще используются системы видеонаблюдения или системы отображения посредством камер, которые заменяют зеркала и допускают возможность повышения качества визуализации, а также дополнительной функциональности, к примеру, изменение масштаба изображения или перекрытия изображений на дисплеях. Следующее преимущество систем видеонаблюдения состоит в том, что использованные камеры являются сравнительно небольшими и, поэтому, уменьшают сопротивление воздуха. Используемые в противном случае зеркала заднего вида из-за своих габаритов образуют значительную подверженную воздействию ветра поверхность, и обуславливают, тем самым, существенно больший расход моторного топлива.
Известные системы видеонаблюдения описаны, к примеру, в US 2017/274827 А1 и в US 2014/132770 А1. Причём описанные там системы допускают использование зеркал через камеры, однако, используется система связи от транспортного средства к транспортному средству для осуществления надёжной регистрации окружающего пространства сзади, или же необходимо наличие механических шарнирных соединений, чтобы иметь возможность одновременно перекрыть различные зоны (переднюю зону, заднюю зону). Эти системы не могут быть использованы в грузовых транспортных средствах или могут быть использованы в них лишь ограниченно, так как в грузовых транспортных средствах, как правило, нет возможности визуального контроля со стороны водителя.
Поэтому имеет место необходимость в системе видеонаблюдения, которая предполагает высокую степень универсальности и надёжности при регистрации окружающего пространства, с целью обеспечения возможности замены зеркал заднего вида, в частности, в грузовых транспортных средствах.
По меньшей мере, одна часть этих проблем решается при помощи системы видеонаблюдения по п.1, грузового транспортного средства по п.8 и способа по п.9 формулы изобретения. Зависимые пункты формулы изобретения определяют другие предпочтительные варианты осуществления предметов изобретения независимых пунктов формулы изобретения.
Предложенное на рассмотрение изобретение относится к системе видеонаблюдения для боковой зоны транспортного средства, в частности, грузового транспортного средства. Система видеонаблюдения содержит:
- блок регистрации изображений для одновременной регистрации визуальных данных к первой нижней зоне и ко второй нижней зоне на, по меньшей мере, одной стороне транспортного средства, и
- блок обработки изображений, который выполнен с возможностью отделять визуальные данные к первой нижней зоне от визуальных данных ко второй нижней зоне, для обеспечения возможности независимого отображения.
Система видеонаблюдения является, в частности, системой индикации посредством камер, которая пригодна для того, чтобы заменить имеющиеся зеркала заднего вида на грузовом транспортном средстве. Она рассчитана, поэтому, для боковой регистрации изображений, чтобы наглядно регистрировать окружающее транспортное средство пространство сбоку и сзади. При этом понимается, что примеры осуществления не должны быть ограничены применением в специальных транспортных средствах, к примеру, в грузовых транспортных средствах. Система видеонаблюдения может использоваться любыми транспортными средствами.
Первая нижняя зона может быть определена следующим образом: она начинается от первой линии, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 4 м смещена назад от положения водителя транспортного средства (или его точки зрения), и с переменной шириной располагается сбоку параллельно краю транспортного средства (стороне водителя или стороне пассажира) назад, причём переменная ширина увеличивается до расстояния 26 м от первой линии назад линейно от 1 м на ширину 5 м, а затем остаётся постоянной.
Вторая нижняя зона может быть определена следующим образом: она начинается от второй линии, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 1,5 м смещена назад от положения водителя транспортного средства (или его точки зрения), и с переменной шириной располагается сбоку параллельно краю транспортного средства (стороне водителя или стороне пассажира) на длину 23,5 м назад, причём переменная ширина увеличивается до расстояния 8,5 м от второй линии линейно от 4,5 м на ширину 15 м, а затем остаётся постоянной.
Первая и вторая нижняя зона может располагаться с обеих сторон транспортного средства, причём блок регистрации, как правило, может регистрировать лишь одну сторону. Термины «впереди» или «передние», а также «сзади», относительно нормального направления движения транспортного средства означают, что «впереди» или «передние» это в направлении нормального движения вперёд транспортного средства.
Дополнительно блок регистрации изображений содержит, по меньшей мере, один из следующих блоков камер:
- первый блок камеры с широкоугольным объективом или с объективом по типу «рыбий глаз», чтобы при размещении на передней угловой зоне грузового транспортного средства на стороне пассажира одновременно регистрировать переднюю зону перед грузовым транспортным средством, первую нижнюю зону, вторую нижнюю зону и третью нижнюю зону,
- второй блок камеры для регистрации визуальных данных на стороне пассажира грузового транспортного средства,
- третий блок камеры для регистрации визуальных данных на стороне водителя грузового транспортного средства,
- четвёртый блок камеры с широкоугольным объективом или с объективом по типу «рыбий глаз», чтобы при размещении на передней угловой зоне грузового транспортного средства на стороне водителя одновременно регистрировать переднюю зону, первую нижнюю зону, вторую нижнюю зону и третью нижнюю зону.
Второй блок камеры и третий блок камеры осуществлены, к примеру, чтобы регистрировать визуальные данные (задней) боковой зоны на стороне водителя или на стороне пассажира транспортного средства (к примеру, зону видимости обычного зеркала заднего вида).
Третья нижняя зона может быть определена следующим образом: она начинается от третьей линии, которая проходит перпендикулярно направлению движения грузового транспортного средства через положение водителя транспортного средства (или его точки зрения), и располагается на 1,75 м назад и на 1 м вперёд на ширину 2 м параллельно краю транспортного средства (стороне водителя или стороне пассажира). Третья нижняя зона находится, таким образом, в основном, рядом с кабиной водителя представленного в качестве примера грузового транспортного средства.
Передняя зона может быть определена следующим образом: она начинается от переднего ограничения транспортного средства и проходит в продольном направлении транспортного средства на, по меньшей мере, 2 м перед ограничением транспортного средства. Кроме того, передняя зона может выходить за пределы общей ширины кабины водителя и сбоку на 2 м за пределы стороны пассажира.
При этом понимается, что блок регистрации регистрирует, по меньшей мере, определённые зоны (нижние зоны и переднюю зону), однако, кроме того, может одновременно регистрировать и другие зоны. Определённые зоны должны представлять собой, таким образом, минимальные зоны, которые, по меньшей мере, регистрируются.
Блок обработки изображений может быть выполнен с возможностью производить трансформацию визуальных данных с первого блока камеры и/или с четвёртого блока камеры, для компенсации искажений, вследствие использования объективов. За счёт этого имеет место дублирование, так как первый блок камеры (а также и четвёртый блок камеры) регистрируют также направленную назад боковую зону транспортного средства, которая регистрируется также вторым блоком камеры (а также и третьим блоком камеры). За счёт трансформации визуальных данных зарегистрированные изображения могут быть подвергнуты сравнению.
Дополнительно система видеонаблюдения содержит, по меньшей мере, один блок индикации с, по меньшей мере, одним первым участком для отображения первой нижней зоны и вторым участком для отображения второй нижней зоны. Третья нижняя зона и/или передняя зона может быть также отображена на особом участке блока индикации. Также возможно, что предусмотрено несколько блоков индикации. Так могут иметь место, к примеру, отдельные дисплеи для стороны пассажира и стороны водителя, для независимого контроля сторон транспортного средства.
Дополнительно осуществлён блок обработки изображений, чтобы в зарегистрированных визуальных данных подтвердить (или распознать, или идентифицировать), по меньшей мере, одну из следующих информаций в отношении окружающего пространства и предоставить соответствующие результаты:
- разметка проезжей части,
- объект (к примеру, дерево, пешеходная дорожка, велосипедная дорожка, пешеход и проч.),
- другое транспортное средство,
- край дороги.
Таким образом, становится возможно, к примеру, поддерживать функции отслеживания полосы движения или системы «ассистент водителя» или автономной езды. В частности, для этого могут быть использованы первый блок камеры и/или четвёртый блок камеры, которые могут быть направлены, к примеру, вертикально вниз (на дорожное полотно) и, таким образом, чётко может быть зарегистрирована информация относительно окружающего пространства, даже если в ближайшем окружении находятся другие транспортные средства или другие объекты и блокируют горизонтальный обзор.
Предложенное на рассмотрение изобретение относится также к транспортному средству, в частности, к грузовому транспортному средству, которое имеет описанную выше систему видеонаблюдения.
Предложенное на рассмотрение изобретение относится также к способу поддержания системы «ассистент водителя» или автономного вождения транспортного средства. Способ имеет следующие этапы:
- оценка визуальных данных, которые были зарегистрированы при помощи описанной выше системы видеонаблюдения,
- базирующееся на этом установление информации об окружающем транспортное средство пространстве, причём информация об окружающем пространстве содержит, по меньшей мере, одну из следующих информаций:
установленная разметка проезжей части, установленный край проезжей части, установленное другое транспортное средство, установленный объект в окружающем транспортное средство пространстве,
- предоставление информации об окружающем пространстве.
Предоставленная информация об окружающем пространстве может быть использована, в частности, для отслеживания следа или для ориентации.
Этот способ или, по меньшей мере, части его могут быть также в форме указаний осуществлены или записаны в программном обеспечении, или на компьютерном программном продукте, причём сохранённые указания могут осуществлять этапы в соответствии со способом, если способ осуществляется на процессоре. Поэтому, предложенное на рассмотрение изобретение относится также к компьютерному программному продукту с сохранённым на нём кодом программного обеспечения (указаниями в программном обеспечении), который осуществлён для выполнения вышеописанного способа, если код программного обеспечения осуществляется посредством блока обработки данных. Блоком обработки данных может быть компьютер или управляющее устройство любой формы, которые имеют соответствующий микропроцессор, имеющий возможность осуществлять код программного обеспечения.
Примеры осуществления предложенного на рассмотрение изобретения станут более понятны на основании последующего детального описания и приложенных чертежей различных примеров осуществления, которые, однако, не должны пониматься как примеры, которые ограничивают выявление посредством специфических вариантов осуществления, а служат лишь для разъяснения и понимания.
фиг.1 демонстрирует систему видеонаблюдения в соответствии с примером осуществления предложенного на рассмотрение изобретения,
фиг.2 демонстрирует другие детали системы видеонаблюдения в соответствии с другими примерами осуществления,
фиг.3А, 3В отображают нижние зоны, которые в соответствии с примерами осуществления одновременно регистрируются блоком регистрации,
фиг.4А, 4В отображают другие нижние зоны, которые в соответствии с примерами осуществления одновременно регистрируются блоком регистрации,
фиг.5А, 5В демонстрируют изображение для нижних зон с фиг.3А, 3В
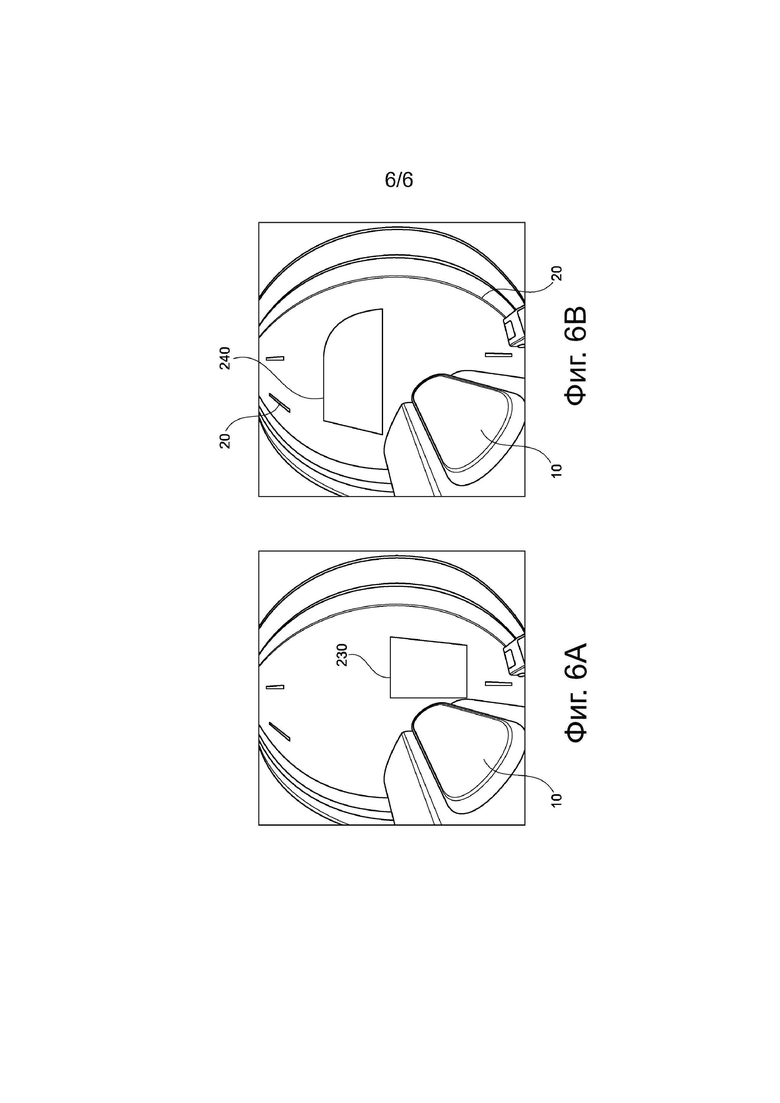
фиг.6А, 6В демонстрируют представленное в качестве примера изображение для нижних зон с фиг.4А, 4В
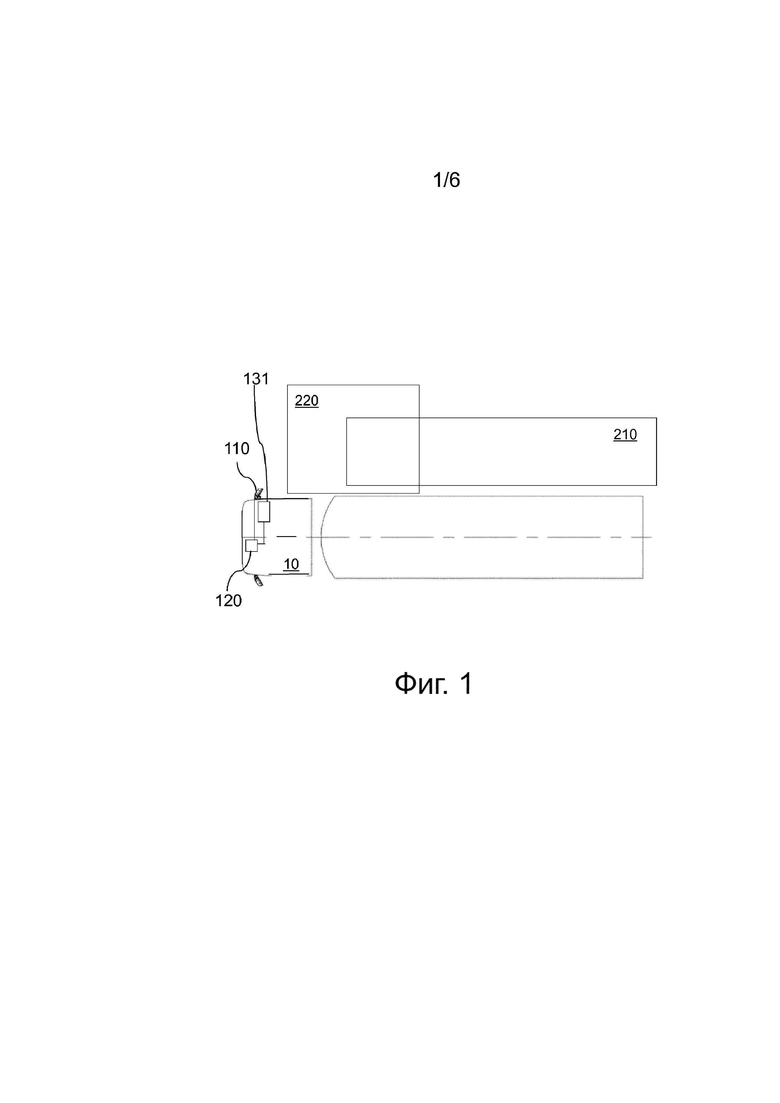
Фиг.1 демонстрирует систему видеонаблюдения в соответствии с примером осуществления предложенного на рассмотрение изобретения. Она, в частности, пригодна для использования в грузовых транспортных средствах, однако, пригодна и для других транспортных средств, с целью замены, к примеру, имеющихся систем зеркал. Система видеонаблюдения содержит блок 110 регистрации изображений для одновременной регистрации визуальных данных к первой нижней зоне 210 и ко второй нижней зоне 220 на, по меньшей мере, одной стороне (в частности, на стороне пассажира) представленного в качестве примера грузового транспортного средства 10. Блоком 110 регистрации изображений является, к примеру, размещённая соответствующим образом камера, которая посредством снимка одновременно регистрирует обе нижние зоны 210, 220. Кроме того, система видеонаблюдения содержит блок 120 оценки изображений, который осуществлён для отделения визуальных данных к первой нижней зоне 210 от визуальных данных ко второй нижней зоне 220, с целью обеспечения возможности независимого отображения.
Дополнительно система видеонаблюдения содержит, по меньшей мере, один блок 131 индикации, для визуального отображения зарегистрированных посредством блока 110 регистрации изображений снимков. Блок 131 индикации не должен быть, однако, частью системы видеонаблюдения. Возможно также использовать для этого уже имеющийся дисплей.
К примеру, возможно отображать первую нижнюю зону 210 на первом участке блока 131 индикации, а вторую нижнюю зону 220 на другом участке. Блоком 110 регистрации изображений в простейшем примере является камера с соответствующим объективом (к примеру, широкоугольным объективом), которая может одновременно регистрировать несколько зон без необходимости перемещения камеры. Несколько зон посредством блока 120 обработки изображений разделяются, с целью обеспечения отдельных одновременных отображений на блоке 131 индикации. Нижние зоны 210, 220 могут, однако, отображаться на дисплее посредством переключения одного за другим.
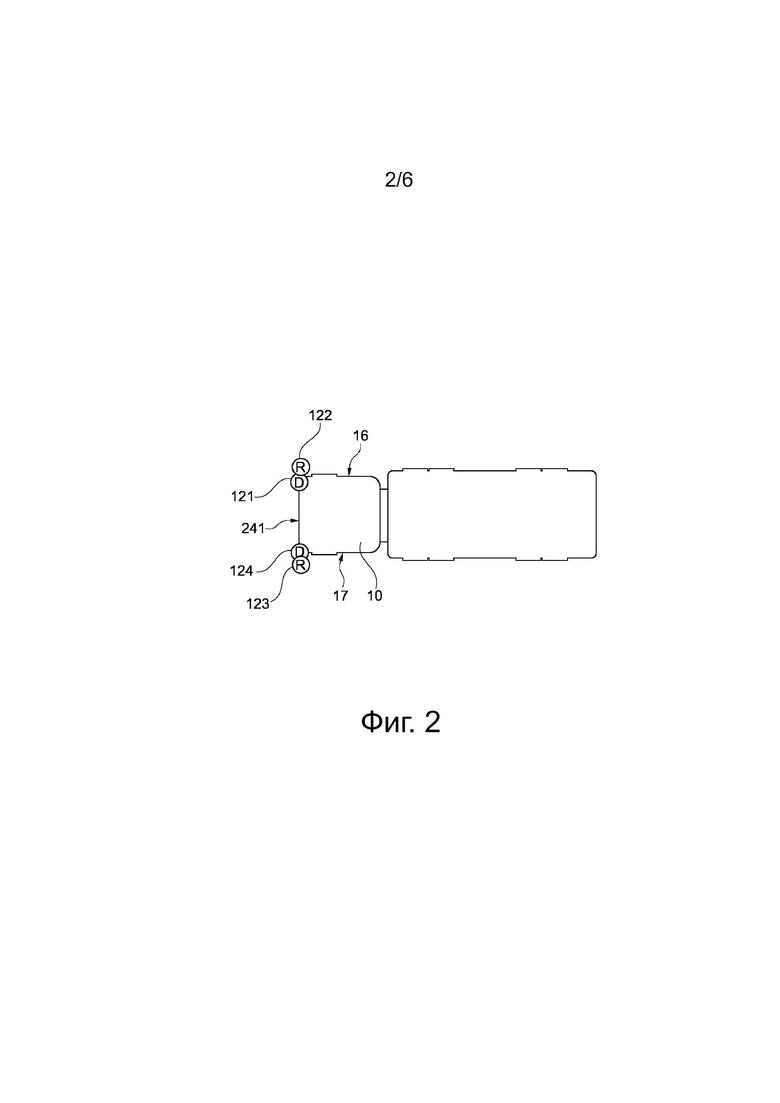
Фиг.2 демонстрирует следующий пример осуществления для системы видеонаблюдения, которая отличается от представленной на фиг.1 системы посредством того, что блок 110 регистрации изображений в качестве примера имеет первый блок 121 камеры, второй блок 122 камеры, третий блок 123 камеры и четвёртый блок 124 камеры.
Первый блок 121 камеры и второй бок 122 камеры осуществлены, к примеру, для размещения в передней угловой зоне или на боковой зоне кабины водителя (к примеру, на стороне 16 пассажира) и для регистрации боковой и задней зоны грузового транспортного средства, независимо друг от друга. В частности, первый блок 121 камеры регистрирует также нижнюю зону непосредственно перед или рядом с грузовым транспортным средством и боковую зону за кабиной водителя. Для достижения этого первый блок 121 камеры может содержать соответствующий широкоугольный объектив, к примеру, объектив по типу «рыбий глаз». Второй блок 122 камеры регистрирует боковую и заднюю зону (первую и вторую нижние зоны 210, 220) представленного в качестве примера грузового транспортного средства. Для этого может быть предусмотрен соответствующий широкоугольный объектив.
Кроме того, на стороне 17 водителя предусмотрены третий блок 123 камеры и четвёртый блок 124 камеры, которые выполнены с возможностью размещения в угловой зоне кабины 10 водителя. Третий блок 123 камеры может быть осуществлён аналогично или одинаково со вторым блоком 122 камеры и может регистрировать боковую зону рядом или за кабиной 10 водителя на стороне 17 водителя. Четвёртый блок 124 камеры может быть осуществлён аналогично или одинаково с первым блоком 121 камеры и может регистрировать нижнюю зону, которая граничит непосредственно с грузовым транспортным средством. Для достижения этого четвёртый блок 124 камеры также может содержать соответствующий широкоугольный объектив, к примеру, объектив по типу «рыбий глаз».
Это обеспечивает преимущество в том, что, благодаря этому, параллельно могут регистрироваться различные зоны работы датчика и, в частности, нижние зоны вокруг транспортного средства. Так, к примеру, первый блок 121 камеры и второй блок 122 камеры могут параллельно регистрировать первую и вторую нижние зоны 210, 220 сбоку рядом или за грузовым транспортным средством. За счёт такого дублирования примеры осуществления оказываются пригодны, в частности, для грузовых транспортных средств, у которых на стороне пассажира визуальный контроль со стороны водителя, в основном, невозможен.
Примеры осуществления предложенного на рассмотрение изобретения особенно пригодны, поэтому, для замены привычных систем зеркал, к примеру, зеркал заднего вида на грузовых транспортных средствах, причём предоставляются дополнительные функциональности.
Фиг.3А, фиг.3В, фиг.4А и фиг.4В отображают нижние зоны, которые в соответствии с примерами осуществления, к примеру, одновременно регистрируются блоками 121, 122, 123, 124 камер как боковые зоны. Здесь и далее все данные по длине понимаются с допуском ±10% или ±5%. Кроме того, этими нижними зонами являются минимальные зоны, которые, по меньшей мере, регистрируются. При этом понимается, что блоки камер, кроме того, могут регистрировать другие зоны.
Фиг.3А, 3В отображают первую нижнюю зону 210 и вторую нижнюю зону 220, которые в соответствии с примерами осуществления одновременно регистрируются посредством второго и третьего блоков 122, 123 камер на их соответствующей стороне.
Фиг.3А демонстрирует первую нижнюю зону 210, которая проходит с обеих сторон транспортного средства и может определяться следующим образом: она начинается от первой линии 211, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 4 м смещена назад от положения 15 водителя транспортного средства (или его точки зрения), и проходит с переменной шириной сбоку параллельно обоим краям 16, 17 транспортного средства назад. Переменная ширина увеличивается назад до расстояния 26 м от первой линии 211 линейно от 1 м на ширину 5 м, а затем остаётся постоянной. Первая нижняя зона 210 имеет, таким образом, максимальную ширину примерно 5м, причём эта максимальная ширина достигается на расстоянии примерно 30 м от положения водителя.
Фиг.3В демонстрирует вторую нижнюю зону 220, которая проходит с обеих сторон транспортного средства и может определяться следующим образом: вторая нижняя зона 220 начинается от второй линии 221, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 1,5 м смещена назад от положения 15 водителя транспортного средства (или его точки зрения), и проходит с переменной шириной сбоку параллельно обоим краям 16, 17 транспортного средства на длину 23,5 м назад. Переменная ширина увеличивается до значения 8,5 м от второй линии 211 линейно от 4,5 м на ширину 15 м, а затем остаётся постоянной. Расстояние увеличивается, таким образом, с примерно 4,5 м до максимальной ширины 15 м, которая достигается на расстоянии примерно 10 м от положения водителя.
Первая нижняя зона 210 с фиг.3А представляет собой, таким образом, в основном зону видимости в направлении назад, в то время как вторая нижняя зона 220 с фиг.3В представляет собой зону видимости сбоку, которая важна, к примеру, для смены полосы движения, чтобы, к примеру, распознавать наличия транспортного средства в одной из наблюдаемых полос движения рядом с транспортным средством. Второй блок 122 камеры (и аналогично третий блок 123 камеры на стороне 16 водителя (примечание переводчика: нужно 17)) служит, в первую очередь, для регистрации первой нижней зоны 210 и одновременно второй нижней зоны 220.
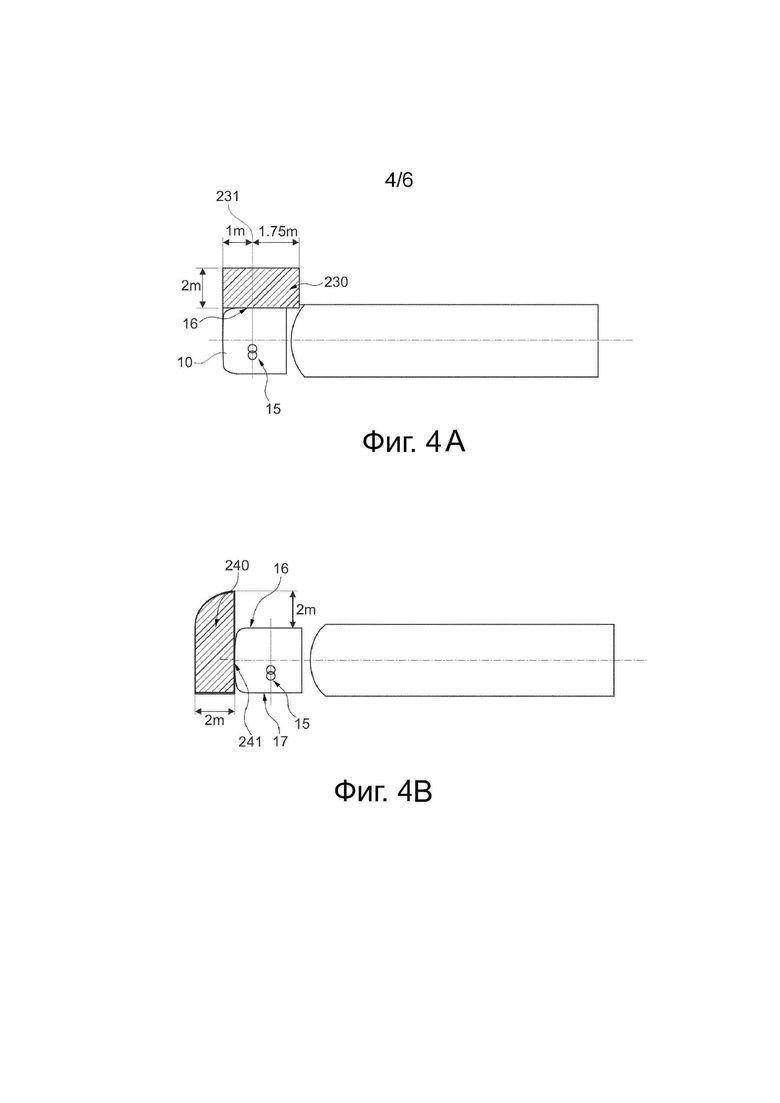
Фиг.4А, 4В отображают третью нижнюю зону 230 и переднюю зону 240, которые в соответствии с примерами осуществления, в первую очередь, одновременно регистрируются первым блоком 121 камеры на стороне 16 пассажира (и аналогично четвёртым блоком 124 камеры на стороне 17 водителя).
Фиг.4А отображает третью нижнюю зону 230, которая начинается от третьей линии 231, которая проходит перпендикулярно направлению движения грузового транспортного средства через положение 15 водителя, на 1,75 м назад и примерно на 1 м вперёд. Ширина третьей нижней зоны 230 равна примерно 2 м от правого края 16 транспортного средства. Таким же или аналогичным образом определяется третья нижняя зона 230 для стороны 17 водителя.
Фиг.4В демонстрирует четвёртую нижнюю зону 240 (переднюю зону), которая, к примеру, также может регистрироваться посредством первого блока 121 камеры. Четвёртая нижняя зона 240 проходит, начиная от передней стороны 241 кабины 10 водителя по ширине транспортного средства до удаления примерно на 2 м вперёд и до 2 м за пределы края 16 транспортного средства на стороне пассажира. Дополнительно четвёртая нижняя зона 240 в переднем правом углу (с точки зрения водителя) закруглена с радиусом примерно 2м. Третья нижняя зона 230 и четвёртая нижняя зона 240 регистрируют, таким образом, в частности, зоны, которые могут плохо просматриваться или вообще не просматриваться водителем грузового транспортного средства (в отличие от легкового автомобиля).
Для достижения желаемого дублирования системы видеонаблюдения первый блок 121 камеры монтируется, к примеру, в верхней угловой зоне кабины 10 водителя на стороне 16 пассажира, так что первый блок 121 камеры может регистрировать третью нижнюю зону 230, четвёртую нижнюю зону 240, первую нижнюю зону 210 и вторую нижнюю зону 220. Чтобы иметь возможность максимально реалистично наглядно отображать все нижние зоны, к примеру, снимки посредством первого блока 121 камеры (к примеру, с объективом по типу «рыбий глаз») первой нижней зоны 210 и второй нижней зоны 220 могут быть соответствующим образом обработаны или трансформированы, с целью устранения возможных искажений посредством объектива по типу «рыбий глаз» первого блока 121 камеры.
На стороне водителя четвёртый блок 124 камеры также является в предпочтительном варианте широкоугольной камерой или камерой по типу «рыбий глаз», которая также регистрирует визуальные данные, которые после соответствующей трансформации пригодны для того, чтобы регистрировать первую и вторую нижние зоны 210, 220 и, по возможности, без искажений наглядно представлять водителю. Для этого четвёртый блок 124 камеры может быть опять же размещён в верхней угловой зоне кабины 10 водителя грузового транспортного средства, так что этот блок камеры может регистрировать не только третью нижнюю зону 230 и четвёртую нижнюю зону 240 (перед кабиной водителя), но и направленную назад первую нижнюю зону 210 и вторую нижнюю зону 220.
Устранение искажений может производиться также с использованием справочных таблиц (так называемых «lookup tables») для приведения изображения в соответствие со специальным дисплеем, который уже имеется в транспортном средстве.
Примеры осуществления позволяют водителю, таким образом, постоянно сохранять контроль над происходящим как на левой стороне транспортного средства, так и на правой стороне транспортного средства. Чтобы обеспечить хорошее покрытие блоками камер, могут быть использованы, к примеру, блоки камер с высоким разрешением и с широкоугольным объективом. По сравнению с традиционными системами зеркал такие системы камер предлагают очень высокую степень универсальности, так как изображения с камер могут отдельно отображаться на различных участках дисплея. К примеру, возможно разделить дисплей, чтобы отдельно отображать различные нижние зоны.
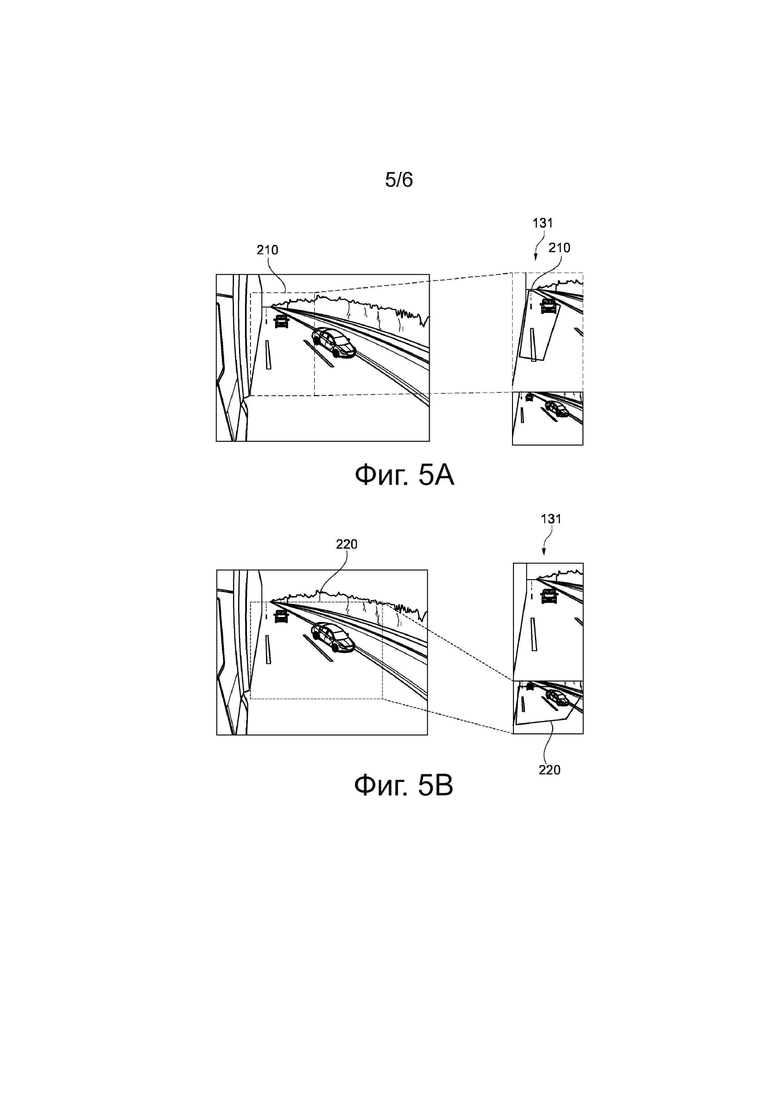
Фиг.5А и фиг.5В демонстрируют, к примеру, как зарегистрированное изображение стороны водителя (на левой стороне) может быть представлено на соответствующем блоке 131 индикации. На фиг.5а выделена в качестве примера первая нижняя зона 210, которая отображается, к примеру, в верхней зоне блока 131 индикации. Фиг.5В демонстрирует вторую нижнюю зону 220, которая отображается, к примеру, на блоке 131 индикации в нижней зоне.
Фиг.6А демонстрирует в качестве примера зарегистрированное изображение третьей нижней зоны 230, которое регистрируется посредством первого блока 121 камеры на стороне 16 пассажира. Фиг.6В демонстрирует в качестве примера переднюю зону 240, которая регистрируется, к примеру, посредством первого блока 121 камеры со стороны 16 пассажира. Обе зарегистрированные зоны 230, 240 могут быть аналогичным образом визуально отображены, как первая нижняя зона 210 и вторая нижняя зона 220 (см. фиг.5А, 5В).
Первый блок 121 камеры (и аналогично четвёртый блок 124 камеры) содержит, в качестве примера, объектив по типу «рыбий глаз» и располагается в угловой зоне кабины водителя, к примеру, на стороне 16 пассажира. Таким образом, могут быть зарегистрированы как третья нижняя зона 230, так и передняя зона 240. Первый блок и третий блок 121, 124 (примечание переводчика: нужно 123) камеры направлены для этого вертикально вниз и, вследствие наличия объектива по типу «рыбий глаз», могут регистрировать также зоны по горизонтали (то есть, первую и вторую нижние зоны 210, 220). Предпочтительным является, если эти камеры 121, 124 по типу «рыбий глаз» имеют, по возможности, высокое разрешение, чтобы после устранения искажений (трансформации изображений) зарегистрированных изображений иметь возможность распознать ещё много деталей. Поэтому, первый блок 121 камеры и/или четвёртый блок 124 камеры могут иметь большее разрешение, чем, к примеру, второй блок 122 камеры и/или третий блок 123 камеры.
Представленные разметки 20 проезжей части (см., к примеру, фиг.6В) могут быть зарегистрированы или определены посредством любого из указанных блоков 121, 122, 123, 124 камер. На основании установленных нижних зон при помощи системы видеонаблюдения почти всегда могут быть зарегистрированы разметки 20 проезжей части или другие объекты. В отличие от традиционных систем, которые направлены вперёд или непосредственно назад, обзор в примерах осуществления предложенного на рассмотрение изобретения может не блокироваться другими объектами (к примеру, транспортными средствами). В частности, камеры по типу «рыбий глаз» (первый или четвёртый блок 121, 124 камеры) подходят для того, чтобы определять разметки 20 проезжей части и/или объекты в окружающем транспортное средство пространстве, так как они регистрируют нижнюю зону со всех сторон. Разметки 20 проезжей части или другие структуры на дорожном полотне вблизи транспортного средства могут быть, однако, распознаны и непрерывно отслежены при использовании направленного назад второго и/или третьего блока 122, 123 камеры.
Поэтому, примеры осуществления могут использоваться также в системе «ассистент водителя» или при автономном вождении, чтобы через дополнительный алгоритм взять на себя функцию определения разметки 20 проезжей части или объектов в окружающем транспортное средство пространстве.
Примеры осуществления предложенного на рассмотрение изобретения относятся, в частности, также к следующим предметам изобретения.
Система видеонаблюдения для грузового транспортного средства, которая содержит, по меньшей мере, одну направленную назад широкоугольную камеру 122, 123, которая перекрывает первую нижнюю зону 210 и вторую нижнюю зону 220.
В соответствии со следующим предпочтительным вариантом осуществления система видеонаблюдения содержит, по меньшей мере, две направленные назад широкоугольные камеры 122, 123, которые могут быть смонтированы на правой и левой стороне транспортного средства.
В соответствии со следующим предпочтительным вариантом осуществления система видеонаблюдения содержит, по меньшей мере, одну направленную назад камеру 121 по типу «рыбий глаз», которая может быть размещена на стороне 16 пассажира, чтобы регистрировать переднюю зону 240 и третью нижнюю зону 230.
В соответствии со следующим предпочтительным вариантом осуществления система видеонаблюдения содержит дополнительную направленную назад камеру 124 по типу «рыбий глаз» на стороне 17 водителя кабины 10 водителя, для предоставления других аналогичных функций, что и на стороне 16 пассажира. Таким образом, и на стороне 17 водителя может быть зарегистрирована первая нижняя зона 210 и вторая нижняя зона 220.
В соответствии со следующим предпочтительным вариантом осуществления изображения, которые регистрируются при помощи системы видеонаблюдения, к примеру, посредством направленных назад широкоугольных камер 122, 123, используются для обнаружения разметок 20 проезжей части и/или для обнаружения объектов.
В соответствии со следующим предпочтительным вариантом осуществления направленная вниз камера 121, 124 по типу «рыбий глаз» может быть использована для распознавания разметок 20 проезжей части и/или для обнаружения объектов.
Примеры осуществления содержат, таким образом, и способ использования системы видеонаблюдения. Этот способ или этапы этого способа может быть / могут быть реализованы также посредством компьютера, то есть он может быть осуществлён посредством указаний, которые сохранены на носителе данных и могут осуществлять этапы способа, если он осуществляется в процессоре. Указания содержат обычно одно или несколько указаний, которые могут быть записаны различным способом на различные среды на управляющее устройство или по периферии управляющего устройства (посредством процессора), которые, когда они считываются и осуществляются посредством блока управления, инициируют блок управления для осуществления функций, функциональности и операций, которые необходимы для осуществления способа в соответствии с предложенным на рассмотрение изобретением.
Выявленные в описании, в формуле изобретения и на чертежах признаки изобретения как по отдельности, так и в любой комбинации, могут быть важны для осуществления изобретения.
Перечень ссылочных позиций
10 кабина водителя
15 положение водителя (положение глаз)
16 сторона пассажира (край транспортного средства на стороне пассажира)
17 сторона водителя
20 разметки проезжей части
110 блок(и) регистрации изображений
120 блок обработки изображений
121, 122, … блоки камер
131 блок(и) индикации
210, 220, … нижняя зона
211, 221, … передние линии ориентира (первая линия, вторая линия, …)
241 передний край транспортного средства / ограничение транспортного средства

Предложена система видеонаблюдения для боковой зоны транспортного средства. Система содержит блок (110) регистрации изображений для одновременной регистрации визуальных данных для первой нижней зоны (210) и для второй нижней зоны (220) на одной стороне транспортного средства, блок (120) обработки изображений, который выполнен с возможностью отделять визуальные данные к первой нижней зоне (210) от визуальных данных ко второй нижней зоне (220), для обеспечения возможности независимого отображения. Предложены также грузовое транспортное средство, способ поддержания системы «ассистент водителя», считываемый компьютером носитель данных. Достигается повышение надежности. 4 н. и 6 з.п. ф-лы, 10 ил.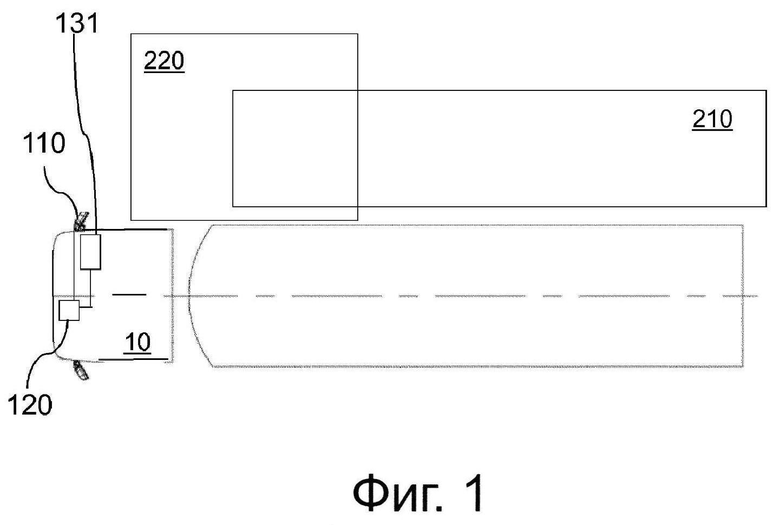
1. Система видеонаблюдения для боковой зоны транспортного средства,
отличающаяся наличием
- блока (110) регистрации изображений для одновременной регистрации визуальных данных для первой нижней зоны (210) и для второй нижней зоны (220) на по меньшей мере одной стороне транспортного средства, и
- блока (120) обработки изображений, который выполнен с возможностью отделять визуальные данные к первой нижней зоне (210) от визуальных данных ко второй нижней зоне (220), для обеспечения возможности независимого отображения.
2. Система видеонаблюдения по п.1, отличающаяся тем, что
первая нижняя зона (210) определена следующим образом:
начинаясь от первой линии (211), которая проходит перпендикулярно направлению движения транспортного средства и на 4 м смещена назад от положения (15) водителя транспортного средства, первая нижняя зона (210) с переменной шириной располагается сбоку параллельно краю (16, 17) транспортного средства назад, причём переменная ширина увеличивается до расстояния 26 м от первой линии (211) линейно от 1 м на ширину 5 м, а затем остаётся постоянной, и
вторая нижняя зона (220) определена следующим образом:
начинаясь от второй линии (221), которая проходит перпендикулярно направлению движения транспортного средства и на 1,5 м смещена назад от положения (15) водителя транспортного средства, вторая нижняя зона (210) с переменной шириной располагается сбоку параллельно краю (16, 17) транспортного средства на длину 23,5 м назад, причём переменная ширина увеличивается до расстояния 8,5 м от второй линии (221) линейно от 4,5 м на ширину 15 м, а затем остаётся постоянной.
3. Система видеонаблюдения по любому из предыдущих пунктов, отличающаяся тем, что
блок (110) регистрации изображений имеет по меньшей мере один из следующих блоков (121, 122, 123, 124) камер:
- первый блок (121) камеры с объективом по типу «рыбий глаз», чтобы при размещении на передней боковой зоне транспортного средства на стороне (16) пассажира одновременно регистрировать переднюю зону (240) перед транспортным средством, первую нижнюю зону (210), вторую нижнюю зону (220) и третью нижнюю зону (230),
- второй блок (122) камеры для регистрации визуальных данных на стороне (16) пассажира транспортного средства,
- третий блок (123) камеры для регистрации визуальных данных на стороне (17) водителя транспортного средства,
- четвёртый блок (124) камеры с объективом по типу «рыбий глаз», чтобы при размещении на передней боковой зоне транспортного средства на стороне водителя одновременно регистрировать переднюю зону (240), первую нижнюю зону (210), вторую нижнюю зону (220) и третью нижнюю зону (230).
4. Система видеонаблюдения по п.3, отличающаяся тем, что
блок (120) обработки изображений выполнен с возможностью компенсировать искажения в зарегистрированных визуальных данных, в частности в снимках, посредством объективов по типу «рыбий глаз».
5. Система видеонаблюдения по п.3 или 4, отличающаяся тем, что
третья нижняя зона (230) определена следующим образом:
начинаясь от третьей линии (231), которая проходит перпендикулярно направлению движения транспортного средства через положение водителя (15) транспортного средства, третья нижняя зона (230) проходит на 1,75 м назад и на 1 м вперёд на ширину 2 м параллельно краю (16, 17) транспортного средства, и
передняя зона (240) определена следующим образом:
начинаясь от переднего ограничения (241) транспортного средства, передняя зона (240) проходит в продольном направлении транспортного средства на по меньшей мере 2 м за пределы общей ширины кабины (10) водителя и сбоку на 2 м за пределы стороны (17) пассажира.
6. Система видеонаблюдения по любому из предыдущих пунктов, отличающаяся наличием
по меньшей мере одного блока (131) индикации с по меньшей мере одним участком для отображения первой нижней зоны (210) и вторым участком для отображения второй нижней зоны (220).
7. Система видеонаблюдения по любому из предыдущих пунктов, отличающаяся тем, что
блок (120) обработки изображений выполнен с возможностью в зарегистрированных визуальных данных подтвердить и предоставить по меньшей мере одну из следующих информаций об окружающем пространстве:
- разметка (20) проезжей части,
- объект,
- другое транспортное средство,
- край дороги.
8. Грузовое транспортное средство, отличающееся наличием системы видеонаблюдения по любому из предыдущих пунктов.
9. Способ поддержания системы «ассистент водителя» или автономного вождения транспортного средства,
отличающийся
- оценкой визуальных данных, которые были зарегистрированы при помощи системы видеонаблюдения по одному из пп.1-7,
- базирующейся на установлении информации об окружающем транспортное средство пространстве, причём информация об окружающем пространстве содержит по меньшей мере одну из следующих информаций:
установленная разметка проезжей части, установленный край дороги, установленное другое транспортное средство, установленный объект в окружающем транспортное средство пространстве,
- предоставление информации об окружающем пространстве.
10. Считываемый компьютером носитель данных, содержащий записанное на нем программное обеспечение, которое предназначено для выполнения способа по п.9, если программное обеспечение осуществляется на блоке обработки данных.
| DE 102008010119A1, 20.11.2008 | |||
| US 20170124881A1, 04.05.2017 | |||
| DE 102013218812A1, 19.03.2015. |

