Предложенное на рассмотрение изобретение относится к усилителю рулевого управления для транспортного средства, в частности, для грузового транспортного средства.
В системах рулевого управления транспортных средств, в частности, системах рулевого управления передним мостом, именуемых также рулевое управление с усилителем, у средних или тяжёлых грузовых транспортных средств, к примеру, рулевой механизм с шарико-винтовой передачей может приводиться в действие посредством внешнего однонаправленного гидравлического насоса, в большинстве случаев пластинчатого насоса. Соединение между насосом и механизмом рулевого управления может осуществляться, к примеру, посредством внешней системы трубопроводов. Дополнительно может быть необходим внешний резервуар для масла в качестве компенсационного резервуара. Таким образом, отдельные компоненты такой системы рулевого управления могут быть рассредоточены по транспортному средству.
На основании этого задачей предложенного на рассмотрение изобретения является создание усовершенствованного усилителя рулевого управления для транспортного средства.
Эта задача решается посредством усилителя рулевого управления для транспортного средства в соответствии с независимым пунктом формулы изобретения.
Представлен усилитель рулевого управления для транспортного средства, содержащий:
- входной вал для передачи крутящего момента от рулевой колонки транспортного средства на усилитель рулевого управления,
- датчик крутящего момента, причём датчик крутящего момента предназначен для того, чтобы регистрировать переданный через входной вал крутящий момент и генерировать сигнал датчика, который отображает зарегистрированный крутящий момент,
- выходной вал для выведения крутящего момента из усилителя рулевого управления,
- унифицированный приводной механизм, причём унифицированный приводной механизм предназначен для того, чтобы механически передавать крутящий момент от входного вала на выходной вал, причём унифицированный приводной механизм расположен внутри направляющего корпуса, и
- приводной блок, причём приводной блок предназначен для того, чтобы в зависимости от сигнала датчика подавать на унифицированный приводной механизм гидравлическую рабочую среду, причём приводной блок и датчик крутящего момента находятся в механическом контакте с картером рулевого механизма.
Под транспортным средством может пониматься грузовое транспортное средство или грузовик, к примеру, грузовой автомобиль или нечто подобное. Усилитель рулевого управления может быть частью системы рулевого управления транспортного средства. Система рулевого управления может иметь рулевую колонку. Под системой рулевого управления может пониматься активная гидравлическая система рулевого управления передним мостом для грузовых транспортных средств. Усилитель рулевого управления может быть предназначен для того, чтобы поддерживать процесс управления мостом транспортного средства. Усилитель рулевого управления может быть предназначен для того, чтобы иметь возможность осуществлять поддерживаемое гидравлической системой преобразование команды на рулевое управление со стороны водителя транспортного средства в поворотное движение моста или колёс транспортного средства. Приводной блок может быть расположен или установлен непосредственно на направляющем корпусе. Датчик крутящего момента может быть расположен или установлен непосредственно на направляющем корпусе. Под рабочей средой может пониматься масло для гидросистем или нечто подобное.
В соответствии с вариантом осуществления может быть представлена, в частности, высоко интегрированная система или конструкция усилителя рулевого управления для активной гидравлической системы рулевого управления передним мостом для грузового транспортного средства или активной гидравлической системы рулевого управления передним мостом для средних и тяжёлых грузовых автомобилей. Для этого усилитель рулевого управления может иметь, к примеру, вместо клапана, в частности, клапана с поворотным золотником, датчик крутящего момента, а компоненты усилителя рулевого управления могут быть расположены в виде одного единственного встроенного комплексного конструктивного узла. Усилитель рулевого управления делает возможной высоко интегрированную активную систему управления передним мостом или высоко интегрированное активное рулевое управление с усилителем, в частности, для средних или тяжёлых грузовиков. Так, к примеру, расположение высоко интегрированной активной системы рулевого управления или активного рулевого управления с усилителем может быть реализовано с сохранением механической технологии гидравлического привода системы управления с шарико-винтовой передачей.
В предпочтительном варианте в соответствии с вариантами осуществления, в частности, необходимое конструктивное пространство усилителя рулевого управления может быть уменьшено и комплексный, высоко интегрированный конструктивный узел может быть представлен без внешних труб или трубопроводов между унифицированным приводным механизмом и приводным блоком. Таким образом, вместо распределённого расположения компонентов может быть получено сконцентрированное, компактное расположение устройства усилителя рулевого управления в грузовике. За счёт встроенного расположения снижение себестоимости за счёт уменьшения количества отдельных компонентов или конструктивных узлов, а также снижение затрат на установку, уменьшение подверженности ошибкам, наполнение рабочей средой, гидравлическое испытание и пуск в предпочтительном варианте могут быть достигнуты в рамках процесса изготовления, как и экономия пространства в транспортном средстве. Также при этом распределённое расположение компонентов, к примеру, насоса, резервуара, унифицированного приводного механизма, системы трубопроводов и проч. может быть уменьшено за счёт высоко интегрированного, сконцентрированного расположения.
Таким образом, к примеру, клиенту в распоряжение может быть предоставлена полностью заполненная и проверенная система рулевого управления или полностью заполненный и проверенный усилитель рулевого управления, который по программе «plug&play» (подключай и работай) или же просто и несложно может быть смонтирован в транспортном средстве. При этом в отношении усилителя рулевого управления может быть достигнуто уменьшение количества компонентов и, тем самым, также уменьшение необходимого пространства, снижение подверженности ошибкам, а также затрат на установку. При этом традиционный привод системы управления с шарико-винтовой передачей может быть конструктивно в значительной степени сохранён, и приводной блок дополнительно может быть встроен в корпус. В качестве предпочтительного побочного эффекта может быть получена экономия горючего материала, к примеру, до 0,5 л на 100 км.
В соответствии с вариантом осуществления, по меньшей мере, унифицированный приводной механизм и приводной блок могут быть расположены внутри общего корпуса. Общим корпусом может быть картер рулевого механизма или другой картер. Такой вариант осуществления даёт преимущество в том, что может быть достигнута компактная, с экономией места, высоко интегрированная конструктивная форма усилителя рулевого управления.
Также приводной блок может иметь насос для подачи рабочей среды и мотор для приведения в действие насоса. Под мотором может пониматься электромотор. Такой вариант осуществления даёт преимущество в том, что приводной блок и, тем самым, также усилитель рулевого управления, по меньшей мере, частично может приводиться в действие автономно (как Steer-by-wire-system (система управления по проводам) или в рамках автономного движения / DAS).
Для этого приводной блок может иметь резервуар для размещения рабочей среды. При этом, по меньшей мере, насос может быть расположен внутри резервуара. Резервуар может иметь закрытую корпусом камеру для размещения масла для гидросистемы или другой рабочей среды. Резервуар может работать как компенсационный резервуар для рабочей среды. Такой вариант осуществления даёт преимущество в том, что приводной блок может быть реализован особенно малогабаритным и компактным. При этом могут иметь место, в частности, проходящие вовне гидропроводы между резервуаром и насосом.
Далее при этом насос может являться двунаправленным насосом, в частности, шестерённым насосом с внутренним зацеплением или шестерённым насосом. Иными словами, насос может приводиться в действие в двух направлениях для подачи рабочей среды в двух различных направлениях или в две различные полости. Такой вариант осуществления даёт преимущество в том, что приводной блок и унифицированный приводной механизм могут быть осуществлены конструктивно просто и надёжно.
В соответствии с вариантом осуществления унифицированный приводной механизм может быть расположен между датчиком крутящего момента и приводным блоком. В альтернативном варианте приводной блок может быть расположен между датчиком крутящего момента и унифицированным приводным механизмом. Такой вариант осуществления даёт преимущество в том, что и так уже имеющееся в распоряжении во многих транспортных средствах конструктивное пространство может быть использовано. Таким образом также, в зависимости от типа транспортного средства, может быть выбрано наилучшим образом подходящее расположение или последовательность расположения конструктивных узлов.
К тому же, усилитель рулевого управления может иметь электронный блок для управления приводным блоком, в зависимости от сигнала датчика. При этом электронный блок может находиться в механическом контакте с приводным блоком. Электронный блок может быть с возможностью передачи сигнала соединён с мотором приводного блока. Такой вариант осуществления даёт преимущество в том, что может быть обеспечена возможность активного управления извне и, тем самым, использование функционала систем DAS / ADAS, автономного движения или электромобильности, без использования других конструктивных мер. В частности, настройка рулевого управления с гидравлическим усилителем может быть осуществлена посредством центрального устройства управления, к примеру, для функционирования систем DAS / ADAS (DAS = Driver Assistance Systems (система «ассистент водителя»); ADAS = Advanced Driver Assistance Systems, (усовершенствованная система «ассистент водителя»)) или автономного движения. Это может быть экономично и надёжно осуществлено без привлечения дополнительных устройств или технических изменений, к примеру, использования дополнительного устройства управления или дополнительного приводного мотора в зоне направляющих стоек или в зоне входного вала.
При этом электронный блок может располагаться относительно приводного блока перпендикулярно продольной оси устройства усилителя рулевого управления со смещением на приводном блоке. Иными словами, электронный блок может быть двусторонне симметрично расположен или размещён на приводном блоке. Такой вариант осуществления даёт преимущество в том, что необходимое для устройства усилителя рулевого управления конструктивное пространство может быть уменьшено. В альтернативном варианте приводной блок может быть расположен между электронным блоком и унифицированным приводным механизмом. При этом электронный блок, приводной блок и унифицированный приводной механизм могут быть расположены в ряд вдоль продольной оси устройства усилителя рулевого управления. Такой вариант осуществления даёт преимущество в том, что разводка от фаз двигателя и проводов датчика, к примеру, для регистрации положения двигателя, температуры, давления и проч., может быть упрощена.
Также унифицированный приводной механизм может иметь гидравлически соединённое с приводным блоком первое рабочее пространство для размещения рабочей среды и гидравлически соединённое с приводным блоком второе рабочее пространство для размещения рабочей среды. При этом первое рабочее пространство может быть соединено с приводным блоком посредством первого трубопровода, а второе рабочее пространство может быть соединено с приводным блоком посредством второго трубопровода. Когда посредством приводного блока в первое рабочее пространство подаётся рабочая среда, может быть инициировано или поддержано перемещение унифицированного приводного механизма в первом направлении. Когда посредством приводного блока рабочая среда подаётся во второе рабочее пространство, то может быть инициировано или поддержано перемещение унифицированного приводного механизма во втором направлении. Такой вариант осуществления даёт преимущество в том, что может быть реализована простая и надёжная конструкция и работа унифицированного приводного механизма.
Далее унифицированный приводной механизм может быть осуществлён в виде шарико-винтовой передачи. При этом унифицированный приводной механизм может иметь поршень со встроенным рециркуляционным шариком и ходовой винт. Ходовой винт может быть через датчик крутящего момента соединён с входным валом. Поршень может посредством рабочей среды перемещаться в первое рабочее пространство или во второе рабочее пространство. Такой вариант осуществления даёт преимущество в том, что такой унифицированный приводной механизм отличается уменьшенным трением, сниженным адгезионным скользящим эффектом, а также уменьшенным износом.
Примеры осуществления представленной в данном случае идеи поясняются более детально в последующем описании, со ссылкой на чертежи, на которых представлено следующее:
фиг.1 - схематичное изображение гидравлической системы рулевого управления передним мостом для грузовых транспортных средств,
фиг.2 - схематичное изображение транспортного средства с системой рулевого управления с усилителем рулевого управления в соответствии с примером осуществления,
фиг.3 - схематичное изображение усилителя рулевого управления в соответствии с примером осуществления,
фиг.4 - схематичное изображение усилителя рулевого управления в соответствии с примером осуществления,
фиг.5 - схематичное изображение усилителя рулевого управления в соответствии с примером осуществления, и
фиг.6 - схематичное изображение усилителя рулевого управления в соответствии с примером осуществления.
В последующем описании оптимальных примеров осуществления предложенной на рассмотрение идеи для представленных на различных фигурах и аналогично работающих элементов используются одинаковые или аналогичные ссылочные позиции, причём отказываются от повторного описания этих элементов.
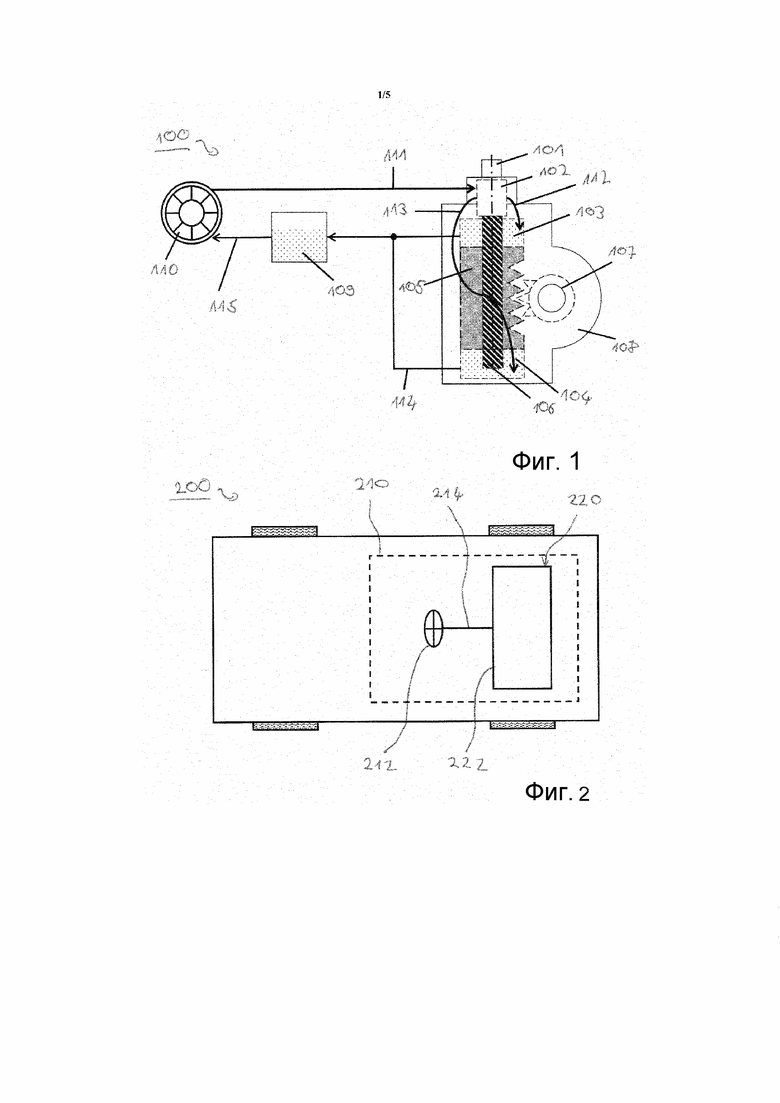
Фиг.1 демонстрирует схематичное изображение гидравлической системы 100 рулевого управления передним мостом для грузовых транспортных средств. Система 100 рулевого управления передним мостом содержит соединённый через направляющие стойки с направляющим колесом входной вал 101, клапан 102 с поворотным золотником со встроенным стабилизатором поперечной устойчивости, верхнее рабочее пространство 103 или верхнее цилиндрическое пространство 103, нижнее рабочее пространство 104 или нижнее цилиндрическое пространство 104, расположенный между верхним рабочим пространством 103 и нижним рабочим пространством 104 поршень 105, соединённый с входным валом 101 через клапан 102 с поворотным золотником ходовой винт 106, выходной вал 107 или вал 107 с канавкой под сегментную шпонку, направляющий корпус 108, резервуара 109 для масла, однонаправленный насос 110, к примеру, пластинчатый насос, пассивно или активном приводимый в действие посредством мотора, первый трубопровод 111 высокого давления в виде системы трубопроводов от насоса 110 к клапану 102 с поворотным золотником или направляющему клапану, второй трубопровод 112 высокого давления от клапана 102 с поворотным золотником в верхнее рабочее пространство 103, третий трубопровод 113 высокого давления от клапана 102 с поворотным золотником в нижнее рабочее пространство 104, первый трубопровод 114 низкого давления в виде системы трубопроводов от рабочих пространств 103 и 104 в резервуар 109 для масла и второй трубопровод 115 низкого давления от резервуара 109 для масла к зоне системы насоса 110.
Обычно насос 110 приводится в действие от двигателя внутреннего сгорания и прифланцован к нему, причём система управления зачастую располагается на раме под водителем, причём резервуар 109 для масла или компенсационный резервуар расположен где-то между ними и, причём соединение компонентов осуществляется через систему трубопроводов.
Фиг.2 демонстрирует схематичное изображение транспортного средства 200 с системой 210 рулевого управления с усилителем 220 рулевого управления в соответствии с примером осуществления. Система 210 рулевого управления расположена в транспортном средстве 200. Под транспортным средством понимается, к примеру, грузовое транспортное средство или грузовик, в частности, среднее или тяжёлое грузовое транспортное средство, к примеру, грузовой автомобиль или нечто подобное. Система 210 рулевого управления может быть осуществлена как система рулевого управления для переднего моста транспортного средства 200. Так система 210 рулевого управления может быть обозначена также как система 100 рулевого управления передним мостом.
Система 210 рулевого управления имеет в соответствии с представленным здесь примером осуществления рулевое колесо 212, рулевую колонку 214 и усилитель 220 рулевого управления. Через рулевую колонку 214 рулевое колесо 212 механически соединено с усилителем 220 рулевого управления. Усилитель рулевого управления имеет картер 222 рулевого механизма. В соответствии с представленным здесь примером осуществления компоненты усилителя 220 рулевого управления расположены внутри картера 222 рулевого механизма. Точнее, лишь один входной вал и/или один выходной вал усилителя 220 рулевого управления выходят из картера 222 рулевого механизма наружу. Усилитель 220 рулевого управления со ссылкой на последующие фигуры поясняется более детально.
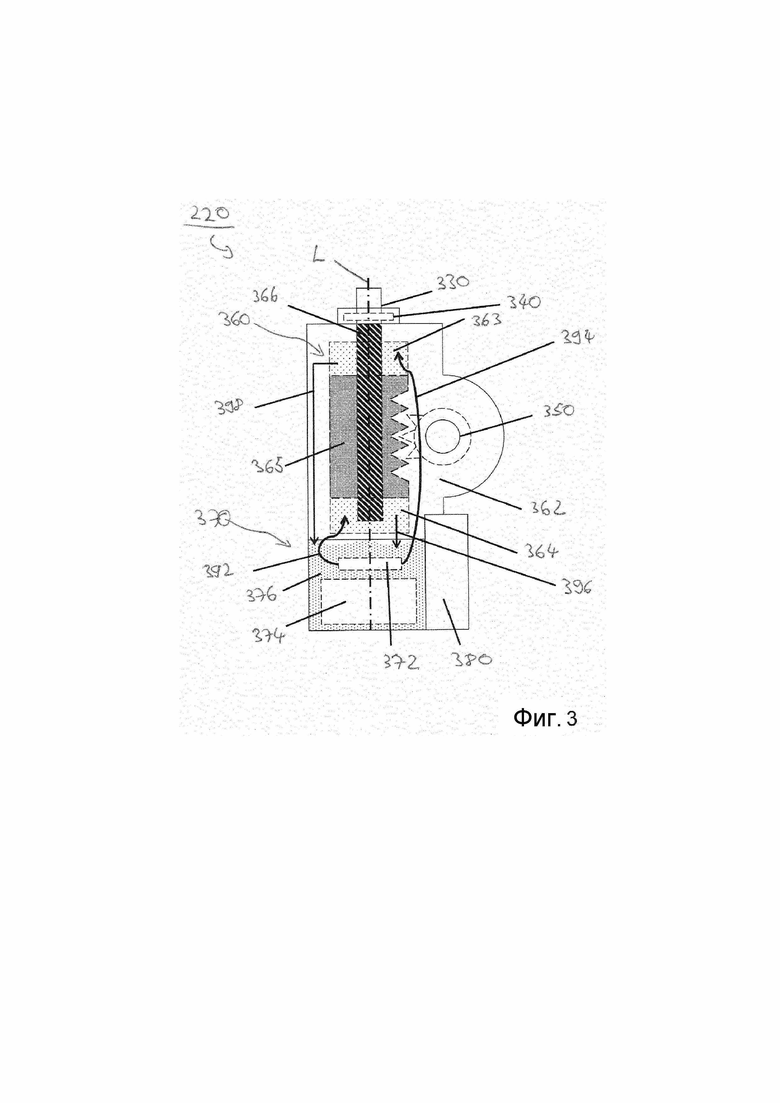
Фиг.3 демонстрирует схематичное изображение усилителя 220 рулевого управления в соответствии с примером осуществления. Усилитель 220 рулевого управления соответствует или аналогично при этом устройству усилителя рулевого управления с фиг.2. Усилитель 220 рулевого управления имеет входной вал 330, датчик 340 крутящего момента, выходной вал 350, унифицированный приводной механизм 360 и приводной блок 370.
Входной вал 330 осуществлён для того, чтобы передавать крутящий момент от рулевой колонки транспортного средства, с которой входной вал 330 выполнен с возможностью соединения или соединён, на усилитель 220 рулевого управления. Переданный через входной вал 330 крутящий момент может обозначаться также как входной крутящий момент. Входной вал 330 через рулевую колонку системы рулевого управления соединён или механически связан с рулевым колесом. Датчик 340 крутящего момента осуществлён для того, чтобы регистрировать переданный через входной вал 330 крутящий момент. Далее датчик 340 крутящего момента осуществлён для того, чтобы подавать сигнал датчика, который отображает значение зарегистрированного крутящего момента. Выходной вал 350 осуществлён для того, чтобы передавать крутящий момент от усилителя 220 рулевого управления или чтобы подавать крутящий момент на мост или на колёса транспортного средства. Выведенный через выходной вал 350 крутящий момент может обозначаться также как выходной крутящий момент или как выходное усилие.
Унифицированный приводной механизм 360 осуществлён для того, чтобы крутящий момент от входного вала 330 механически передавать на выходной вал 350. В частности, унифицированный приводной механизм 360 осуществлён для того, чтобы входной крутящий момент преобразовывать в выходной крутящий момент. Унифицированный приводной механизм 360 имеет картер 362 рулевого механизма. Унифицированный приводной механизм 360 располагается внутри картера 362 рулевого механизма. Приводной блок 370 осуществлён для того, чтобы в зависимости от сигнала датчика 340 крутящего момента подавать на унифицированный приводной механизм 360 гидравлическую рабочую среду. Иными словами, приводной блок 370 осуществлён для того, чтобы в зависимости от сигнала датчика 340 крутящего момента посредством рабочей среды поддерживать или усиливать перемещение унифицированного приводного механизма 360 или перемещение внутри унифицированного приводного механизма 360.
Приводной блок 370 и датчик 340 крутящего момента находятся в механическом контакте с картером 362 рулевого механизма. Точнее, приводной блок 370 и датчик 340 крутящего момента непосредственно прифланцованы или иным способом размещены на картере 362 рулевого механизма. Также дополнительно или в альтернативном варианте приводной блок 370 и датчик 340 крутящего момента расположены внутри картера 362 рулевого механизма. По меньшей мере, унифицированный приводной механизм 360 и приводной блок 370 расположены внутри общего корпуса. В дополнение и датчик 340 крутящего момента расположен внутри общего корпуса. Под общим корпусом понимается, к примеру, картер 362 рулевого механизма.
В соответствии с представленным в данном случае примером осуществления унифицированный приводной механизм 360 осуществлён в виде шарико-винтовой передачи. При этом унифицированный приводной механизм 360 имеет гидравлически соединённое с приводным блоком 370 первое рабочее пространство 363 для размещения рабочей среды, гидравлически соединённое с приводным блоком 370 второе рабочее пространство 364 для размещения рабочей среды, поршень 365 со встроенным рециркуляционным шариком и ходовой винт 366, который через датчик 340 крутящего момента механически соединён с входным валом 330.
В соответствии с представленным в данном случае примером осуществления приводной блок 370 имеет насос 372 для подачи рабочей среды и мотор 374 для приведения в действие насоса 372. Под мотором 374 понимается электромотор. Насос 372 осуществлён в виде двунаправленного насоса. К примеру, под насосом 372 понимается шестерённый насос с внутренним зацеплением, шестерённый насос или нечто подобное. Далее приводной блок 370 имеет резервуар 376 для размещения рабочей среды. По меньшей мере, насос 372 располагается внутри резервуара 376. В соответствии с представленным в данном случае примером осуществления насос 372 и мотор 374 расположены внутри резервуара 376.
Усилитель 220 рулевого управления имеет в соответствии с представленным в данном случае примером осуществления также и электронный блок 380 или блок управления. Электронный блок 380 находится в механическом контакте с приводным блоком 370. При этом электронный блок 380 непосредственно прифланцован или иным образом размещён на приводном блоке 370. Электронный блок 380 осуществлён для того, чтобы управлять приводным блоком 370 в зависимости от сигнала датчика 340 крутящего момента. Точнее, электронный блок 380 осуществлён для того, чтобы управлять мотором 374 приводного блока 370 в зависимости от сигнала датчика. Под электронным блоком 380 понимается микроконтроллер, так называемый «Logic-Board» или нечто подобное. Электронный блок 380 может представлять собой также конечную ступень для системы управления двигателем.
Касательно усилителя 220 рулевого управления на фиг.3 обозначена также продольная ось L. Входной вал 330, ходовой винт 366, а также поршень 365 располагаются вдоль продольной оси L. В соответствии с представленным в данном случае примером осуществления унифицированный приводной механизм 360 располагается между датчиком 340 крутящего момента и приводным блоком 370. При этом входной вал 330, датчик 340 крутящего момента, унифицированный приводной механизм 360 и приводной блок 370 расположены в ряд вдоль продольной оси L. Электронный блок 380 расположен на приводном блоке 370 со смещением относительно приводного блока 370 перпендикулярно продольной оси L. Выходной вал 350 относительно поршня 365 и ходового винта 366 расположен перпендикулярно продольной оси L со смещением. При этом электронный блок 380 смещён в том же направлении, что и выходной вал 350 перпендикулярно продольной оси L.
Насос 372 приводного блока 370 через первый трубопровод 392 высокого давления гидравлически соединён со вторым рабочим пространством 364 унифицированного приводного механизма 360. Далее насос 372 через второй трубопровод 394 высокого давления гидравлически соединён с первым рабочим пространством 363 унифицированного приводного механизма 360. Второе рабочее пространство 364 унифицированного приводного механизма 360 через первый трубопровод 396 низкого давления гидравлически соединено с резервуаром 376. Первое рабочее пространство 363 унифицированного приводного механизма 360 через второй трубопровод 398 низкого давления гидравлически соединено с резервуаром 376. Трубопроводы 392 и 394 высокого давления, а также трубопроводы 396 и 398 низкого давления проходят внутри усилителя 220 рулевого управления. Насос 372 гидравлически соединён с резервуаром 376.
Приводной блок 370 или же так называемый блок питания, включая насос 372, мотор 374 и электронный блок 380, смонтированы на транспортном средстве в зоне рулевой сошки. В этой зоне на многих транспортных средствах в распоряжении имеется конструктивное пространство. Входной вал 330, по сравнению с традиционными системами рулевого управления, не удлинён или удлинён лишь незначительно, так что необходимое ранее конструктивное пространство привода системы управления не должно быть расширено или должно быть расширено лишь незначительно. За счёт бокового расположения электронного блока 380 достигается небольшая конструктивная длина и, тем самым, возможность простой замены традиционных компонентов. В соответствии с другим примером осуществления электронный блок 380 может быть смещён также и в другом, чем выходной вал 350, направлении перпендикулярно продольной оси L.
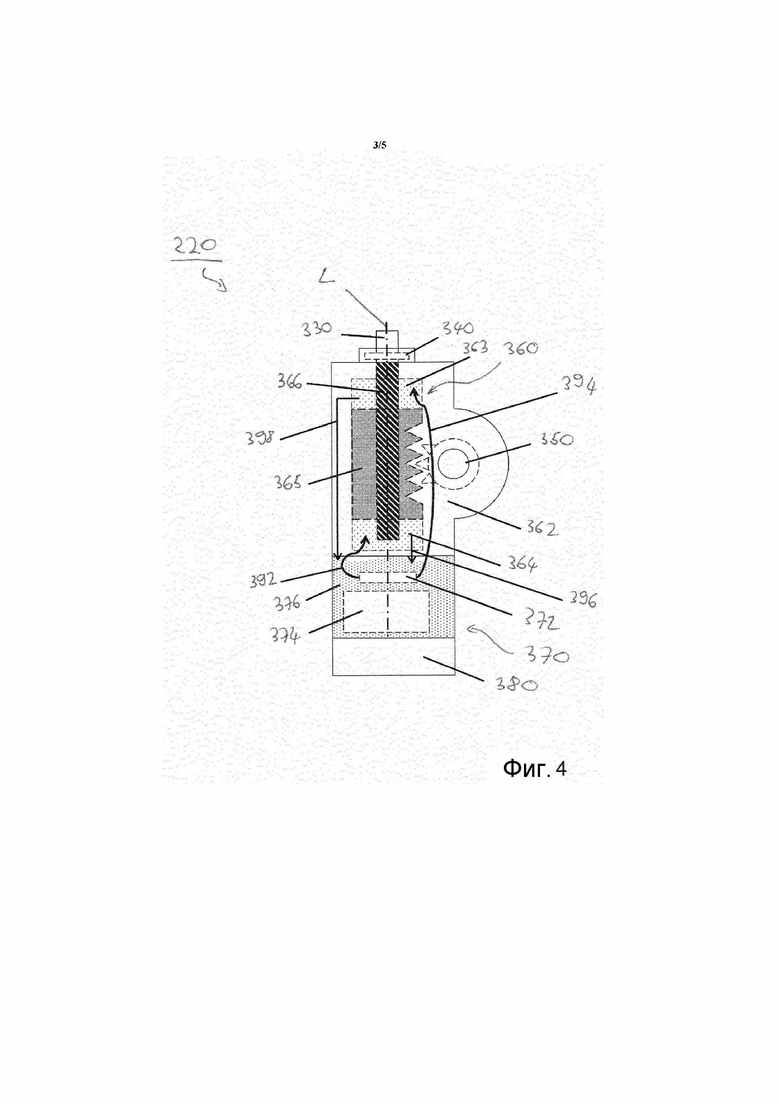
Фиг.4 демонстрирует схематичное изображение усилителя 220 рулевого управления в соответствии с примером осуществления. Усилитель 220 рулевого управления соответствует усилителю 220 рулевого управления с фиг.3, за исключением того, что приводной блок 370 располагается между электронным блоком 380 и унифицированным приводным механизмом 360 или электронный блок 380 расположен относительно продольной оси L аксиально по длине приводного блока 370.
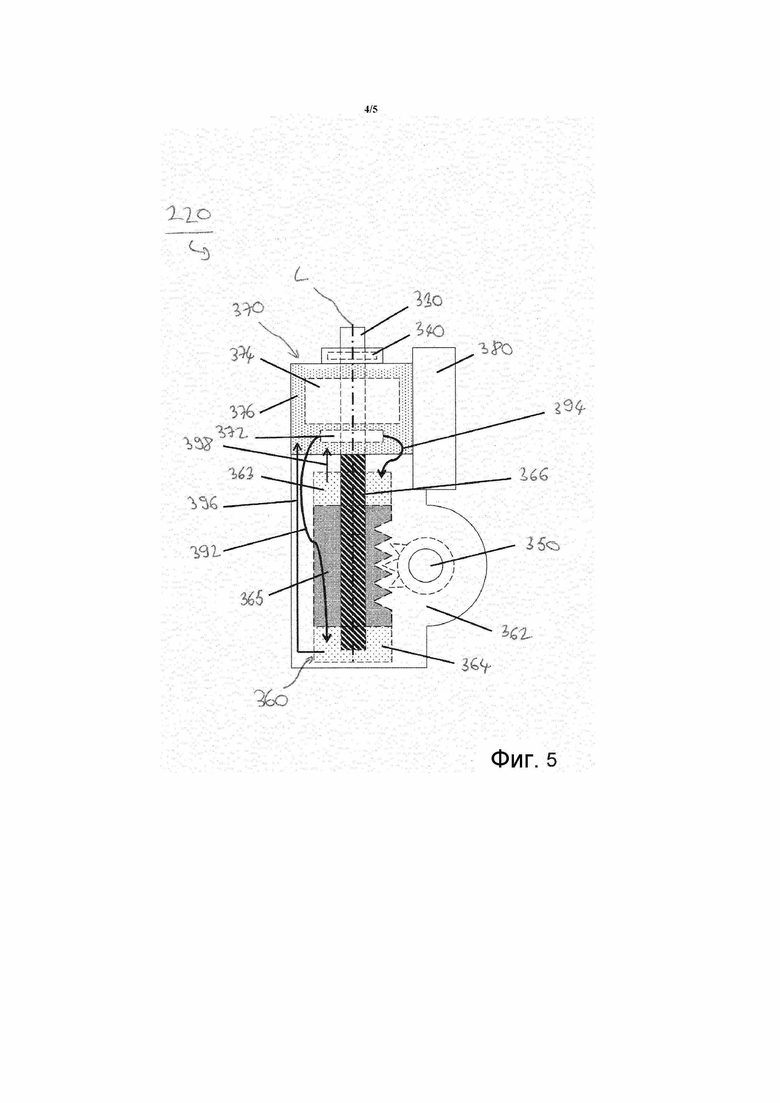
Фиг.5 демонстрирует схематичное изображение усилителя 220 рулевого управления в соответствии с примером осуществления. Усилитель 220 рулевого управления соответствует усилителю рулевого управления с фиг.3, за исключением того, что приводной блок 370 располагается между датчиком 340 крутящего момента и унифицированным приводным механизмом 360. При этом электронный блок 380 расположен также относительно приводного блока 370 перпендикулярно продольной оси L со смещением на приводном блоке 370.
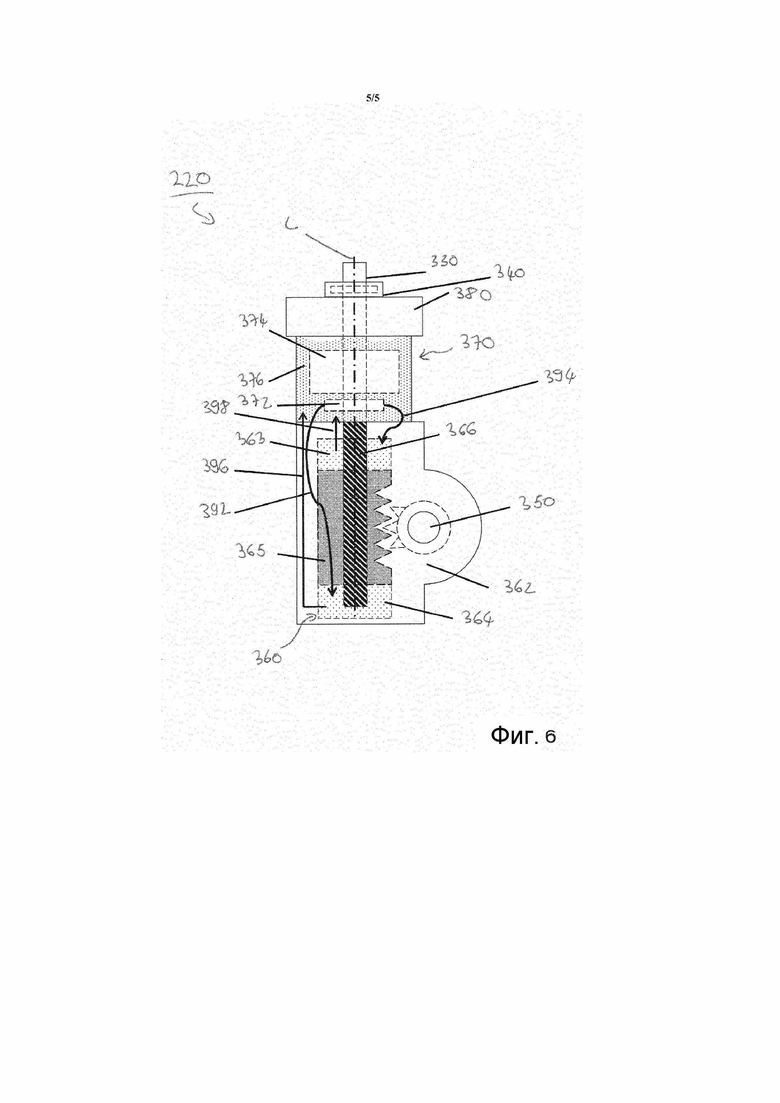
Фиг.6 демонстрирует схематичное изображение усилителя 220 рулевого управления в соответствии с примером осуществления. Усилитель 220 рулевого управления соответствует усилителю рулевого управления с фиг.5, за исключением того, что приводной блок 370 располагается между электронным блоком 380 и унифицированным приводным механизмом 360 или электронный блок 380 расположен относительно продольной оси L аксиально по длине приводного блока 370.
Со ссылкой на фиг.2-6 следует заметить, что для описанных в данном случае примеров осуществления действительны следующие пояснения. По сравнению с обычным гидравлическим приводом системы управления с рециркуляционным шариком примеры осуществления имеют вместо гидравлического клапана с поворотным золотником датчик 340 крутящего момента. Стабилизатор поперечной устойчивости остаётся. Он создаёт за счёт управления системой со стороны водителя угол рассогласования, который регистрируется датчиком 340 крутящего момента и пересчитывается в момент приложения силы со стороны водителя. Дополнительно в соответствии с примерами осуществления приводной блок 370, который имеет двунаправленный насос 372 и мотор 374, а также электронный блок 380 для управления приводным блоком 370, интегрированы в картер 222 рулевого механизма. Масло для гидросистемы в качестве рабочей среды в соответствии с пожеланием водителя при помощи насоса 372 и с использованием соответствующего алгоритма управления нагнетается в соответствующее рабочее пространство 363 или 364. Принцип действия сравним с гидравлическим приводом.
Если пример осуществления имеет «и/или» связь между первым признаком и вторым признаком, то это следует рассматривать как тот факт, что пример осуществления в соответствии с вариантом осуществления содержит как первый признак, так и второй признак, а в соответствии со следующим вариантом осуществления содержит либо только первый признак, либо только второй признак.
Перечень ссылочных позиций
100 система рулевого управления передним мостом
101 входной вал
102 клапан с поворотным золотником
103 верхнее рабочее пространство
104 нижнее рабочее пространство
105 поршень
106 ходовой винт
107 выходной вал
108 картер рулевого механизма
109 резервуар для масла
110 насос
111 первый трубопровод высокого давления
112 второй трубопровод высокого давления
113 третий трубопровод высокого давления
114 первый трубопровод низкого давления
115 второй трубопровод низкого давления
200 транспортное средство
210 система рулевого управления
212 рулевое колесо
214 рулевая колонка
220 усилитель рулевого управления
222 картер рулевого механизма
330 входной вал
340 датчик крутящего момента
350 выходной вал
360 унифицированный приводной механизм
362 картер рулевого механизма
363 первое рабочее пространство
364 второе рабочее пространство
365 поршень
366 ходовой винт
370 приводной блок
372 насос
374 мотор
376 резервуар
380 электронный блок или блок управления
392 первый трубопровод высокого давления
394 второй трубопровод высокого давления
396 первый трубопровод низкого давления
398 второй трубопровод низкого давления
L продольная ось
Изобретение относится к усилителю рулевого управления для транспортного средства. Усилитель 220 содержит входной вал 330 для передачи крутящего момента от рулевой колонки транспортного средства на усилитель рулевого управления, датчик 340 крутящего момента, предназначенный для регистрирования переданного через входной вал крутящего момента и генерирования сигнала датчика, который отображает зарегистрированный крутящий момент, выходной вал 350 для выведения крутящего момента из усилителя 220 рулевого управления и унифицированный приводной механизм 360. Унифицированный приводной механизм 360 предназначен для механической передачи крутящего момента от входного вала 330 на выходной вал 350 и расположен внутри картера 362 рулевого механизма. Приводной блок 370 предназначен для подачи в зависимости от сигнала датчика на унифицированный приводной механизм 360 гидравлической рабочей среды. Приводной блок 370 и датчик 340 крутящего момента находятся в механическом контакте с картером 362 рулевого механизма. Приводной блок 370 имеет насос 372 для подачи рабочей среды, мотор 374 для приведения в действие насоса 372, резервуар 376 для размещения рабочей среды. По меньшей мере, насос 372 расположен внутри резервуара, а входной вал 330, датчик 340 крутящего момента, унифицированный приводной механизм 360 и приводной блок 370 расположены в ряд вдоль продольной оси L усилителя 220 рулевого управления. Обеспечивается создание унифицированного усилителя рулевого управления. 7 з.п. ф-лы, 6 ил.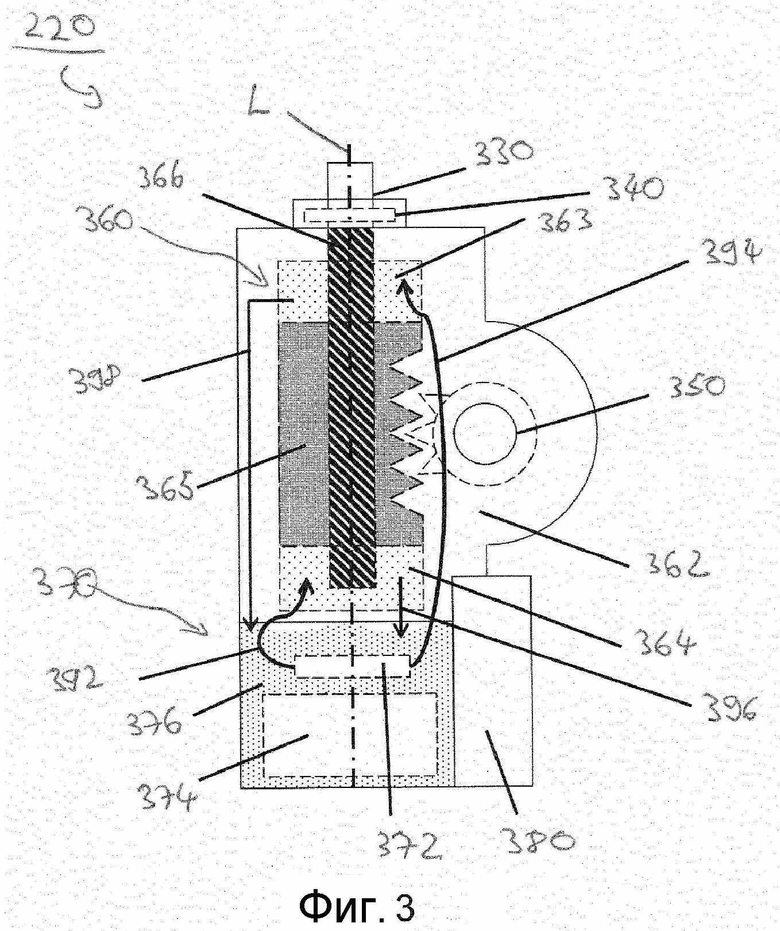
1. Усилитель (220) рулевого управления для транспортного средства (200), содержащий:
- входной вал (330) для передачи крутящего момента от рулевой колонки (214) транспортного средства (200) на усилитель (220) рулевого управления,
- датчик (340) крутящего момента, причём датчик (340) крутящего момента предназначен для регистрирования переданного через входной вал (330) крутящего момента и генерирования сигнала датчика, который отображает зарегистрированный крутящий момент,
- выходной вал (350) для выведения крутящего момента из усилителя (220) рулевого управления,
- унифицированный приводной механизм (360), причём унифицированный приводной механизм (360) предназначен для механической передачи крутящего момента от входного вала (330) на выходной вал (350), причём унифицированный приводной механизм (360) расположен внутри картера (362) рулевого механизма,
- приводной блок (370), предназначен для подачи в зависимости от сигнала датчика на унифицированный приводной механизм (360) гидравлической рабочей среды, причём приводной блок (370) и датчик (340) крутящего момента находятся в механическом контакте с картером (362) рулевого механизма, причем приводной блок (370) имеет насос (372) для подачи рабочей среды и мотор (374) для приведения в действие насоса (372), при этом приводной блок (370) имеет резервуар (376) для размещения рабочей среды, причём, по меньшей мере, насос (372) расположен внутри резервуара, а входной вал (330), датчик (340) крутящего момента, унифицированный приводной механизм (360) и приводной блок (370) расположены в ряд вдоль продольной оси L усилителя (220) рулевого управления.
2. Усилитель (220) рулевого управления по п. 1, отличающийся тем, что, по меньшей мере, унифицированный приводной механизм (360) и приводной блок (370) расположены внутри картера (222; 362) рулевого механизма.
3. Усилитель (220) рулевого управления по п. 1, отличающийся тем, что насос (372) является двунаправленным насосом, в частности, шестерённым насосом с внутренним зацеплением или шестерённым насосом.
4. Усилитель (220) рулевого управления по любому из пп. 1-3, отличающийся тем, что унифицированный приводной механизм (360) расположен между датчиком (340) крутящего момента и приводным блоком (370) или приводной блок (370) расположен между датчиком (340) крутящего момента и унифицированный приводным механизмом (360).
5. Усилитель (220) рулевого управления по любому из пп. 1-4, отличающийся тем, что содержит электронный блок (380) для управления приводным блоком (370), в зависимости от сигнала датчика, причём электронный блок (380) находится в механическом контакте с приводным блоком (370).
6. Усилитель (220) рулевого управления по п. 5, отличающийся тем, что электронный блок (380) расположен относительно приводного блока (370) перпендикулярно продольной оси (L) усилителя (220) рулевого управления со смещением на приводном блоке (370) или приводной блок (370) расположен между электронным блоком (380) и унифицированный приводным механизмом (360).
7. Усилитель (220) рулевого управления по любому из пп. 1-6, отличающийся тем, что унифицированный приводной механизм (360) имеет гидравлически соединённое с приводным блоком (370) первое рабочее пространство (363) для размещения рабочей среды и гидравлически соединённое с приводным блоком (370) второе рабочее пространство (364) для размещения рабочей среды.
8. Усилитель (220) рулевого управления по любому из пп. 1-7, отличающийся тем, что унифицированный приводной механизм (360) выполнен в виде шарико-винтовой передачи.
| DE 102014117301 A1, 02.06.2016 | |||
| DE 102015222864 A1, 24.05.2017 | |||
| DE 19829531 A1, 05.01.2000 | |||
| WO 0228673 A1, 11.04.2002. |

