Область техники, к которой относится изобретение
Изобретение относится к механическому часовому механизму, содержащему по меньшей мере одно средство хранения энергии, выполненное с возможностью привода зубчатой передачи, выходной подвижный компонент которой выполнен с возможностью поворота вокруг приводной оси и содержит поворотный резонатор, содержащий по меньшей мере один центральный подвижный компонент, выполненный с возможностью поворота вокруг центральной оси и содержащий входной подвижный компонент, выполненный с возможностью взаимодействия с выходным подвижным компонентом.
Изобретение также относится к наручным или карманным часам, содержащим такой механизм.
Изобретение относится к области задающих генераторов для механических часовых механизмов.
Уровень техники
Большинство современных механических часов снабжено балансом с волоском и швейцарским рычажным спусковым механизмом. Баланс с волоском представляет собой задающий генератор часов. Его также называют «резонатором». Спусковой механизм, со своей стороны, выполняет две ключевые функции:
- поддержание циклов движения резонатора вперед-назад;
- счет этих циклов.
В дополнение к выполнению этих двух основных функций требуется, чтобы спусковой механизм был прочным, стойким к толчкам, исключал торможение движения (перебрасывание) и не терял его установку в течение продолжительного периода времени.
Швейцарский рычажный спусковой механизм, являющийся одним из наиболее часто используемых, обладает низкой эффективностью использования энергии, составляющей порядка 30%. Эти низкоэффективные системы являются таковыми из-за того, что движения спускового механизма являются толчкообразными, в них существуют холостые проходы или выстои, которые требуются для восприятия распространения циклов обработки, а также из-за того, что некоторые компоненты передают их движение через наклонные плоскости, которые трутся друг о друга.
Раскрытие сущности изобретения
Задачей настоящего изобретения является исключение толчкообразного движения спускового механизма для повышения его эффективности. Для решения этой задачи предложено использовать поворотный резонатор, характеризующийся, главным образом, тем, что он обладает возможностью поддержания вращения благодаря использованию крутящего момента, прилагаемого непосредственно к оси резонатора, исключая, таким образом, динамические потери обычного рычажного спускового механизма.
Исторически так сложилось, что часовщики не рассматривали поворотные резонаторы в качестве задающего генератора для наручных или карманных часов, так как поворотные резонаторы обычно не являются изохронными, и, кроме того, они чувствительны к силе тяготения и, таким образом, к положению наручных или карманных часов в гравитационном поле.
Такой механизм, как регулятор Ватта, может составлять основу поворотного резонатора, но с изменениями, вводимыми для того, чтобы сделать его изохронным и нечувствительным к силе тяготения. Более конкретно, регулятор Ватта чувствителен к его ориентации в гравитационном поле, так как общий центр масс двух грузиков смещается с изменением амплитуды: грузики поднимаются вверх вдоль оси при увеличении амплитуды. В результате, воздействие сил тяготения на возвратную силу колеблется в зависимости от ориентации. Кроме того, регулятор Ватта является анизохронным, так как возвратная сила грузиков, при использовании пружины и/или при использовании сил тяготения, не соответствует определенным условиям.
Изобретение, таким образом, ставит перед собой задачу создания условий, при которых было бы возможно использование поворотного резонатора, который можно было бы использовать в качестве задающего генератора в приборе для измерения времени:
- условия изохронности: наличие упругих (или потенциально упругих) возвратных сил, прикладываемых к центру масс каждого полуплеча; наличие центральной силы с интенсивностью, пропорциональной расстоянию между осью вращения и центром масс полуплеча;
- условия позиционной интенсивности: использование по меньшей мере двух полуплеч, направляемых таким образом, чтобы их центр масс можно было отводить от оси вращения, сохраняя, в то же время, общий центр масс резонатора в фиксированном положении;
- условия нулевых сил реакции в опоре: использование плеч, распределенных симметрично относительно оси таким образом, чтобы были исключены реакции в шарнирах при всех амплитудах.
Поэтому изобретение относится к механическому часовому механизму по п. 1.
Изобретение также относится к часам, содержащим такой механизм.
Краткое описание чертежей
Дополнительные отличительные признаки и преимущества изобретения станут очевидными после прочтения последующего подробного описания со ссылками на прилагаемые чертежи.
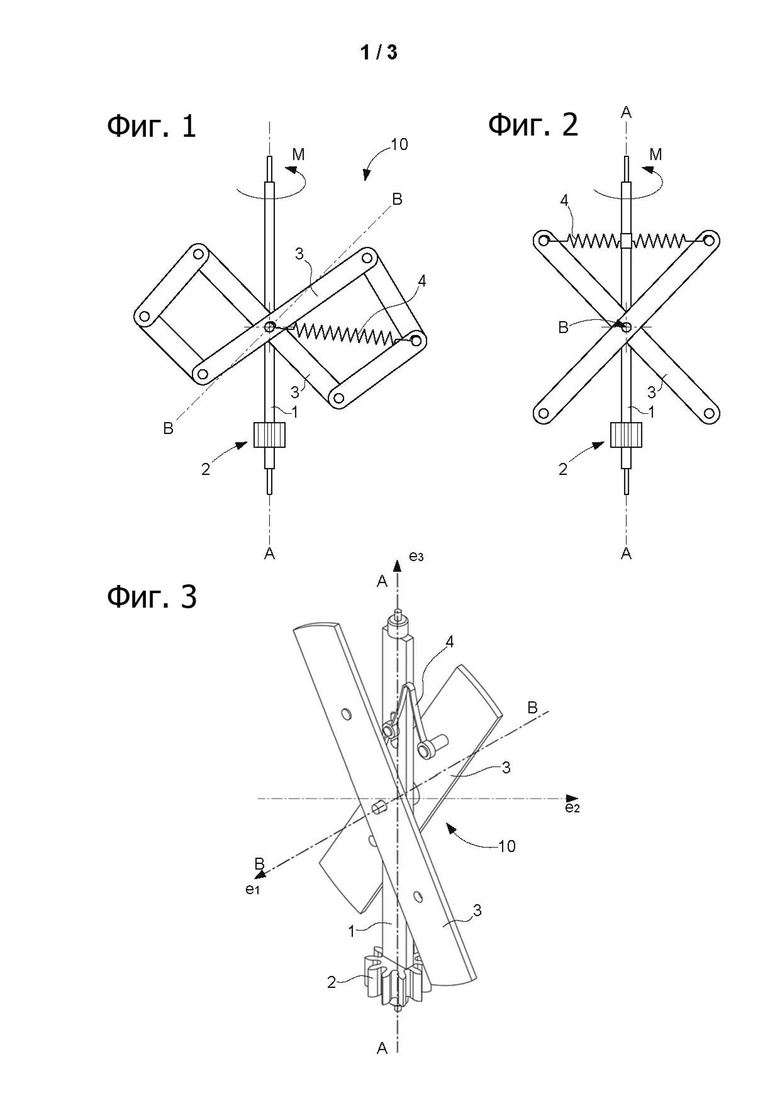
На фиг. 1 - схематический вид в перспективе первого варианта резонаторного механизма согласно изобретению, выполненного на основе резонаторного механизма типа пантографа согласно заявке EP16195399 этого же заявителя, но в котором поворот инерционных элементов происходит перпендикулярно повороту привода;
на фиг. 2, как и на фиг. 1, - другой альтернативный вариант резонаторного механизма согласно изобретению, упрощенного посредством исключения сочлененных динамических звеньев;
на фиг. 3 - детали поворотного резонаторного механизма, подобного изображенному на фиг. 2, содержащего центральный подвижный компонент, выполненный с возможностью поворота относительно центральной оси, относительно которой два плоских инерционных элемента возвращаются к центральному подвижному компоненту под действием упругих возвратных средств, состоящих здесь из тонкостенных упругих клиновидных элементов, которые могут перемещаться относительно перпендикулярной оси;
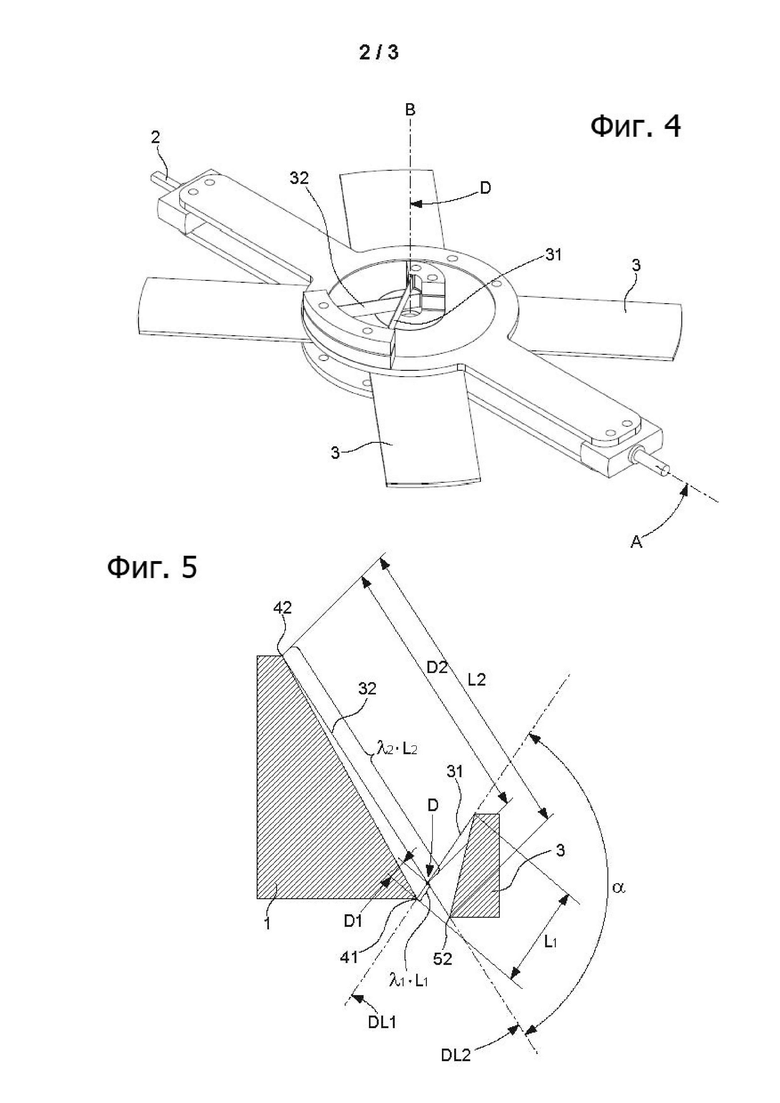
на фиг. 4 - альтернативный вариант, в котором упругие возвратные средства состоят из перекрещенных пластин - гибких направляющих, где каждая гибкая направляющая, содержит два уровня и одну пластину на уровень; причем эти две пластины перекрещены в проекции на плоскость, параллельную плоскостям уровней;
на фиг. 5 - вид в проекции на плоскость первого устройства, содержащего две такие асимметричные перекрещенные пластины в конкретном устройстве, выполненном с возможностью создания возвратного крутящего момента, пропорционального синусу двойного угла поворота;
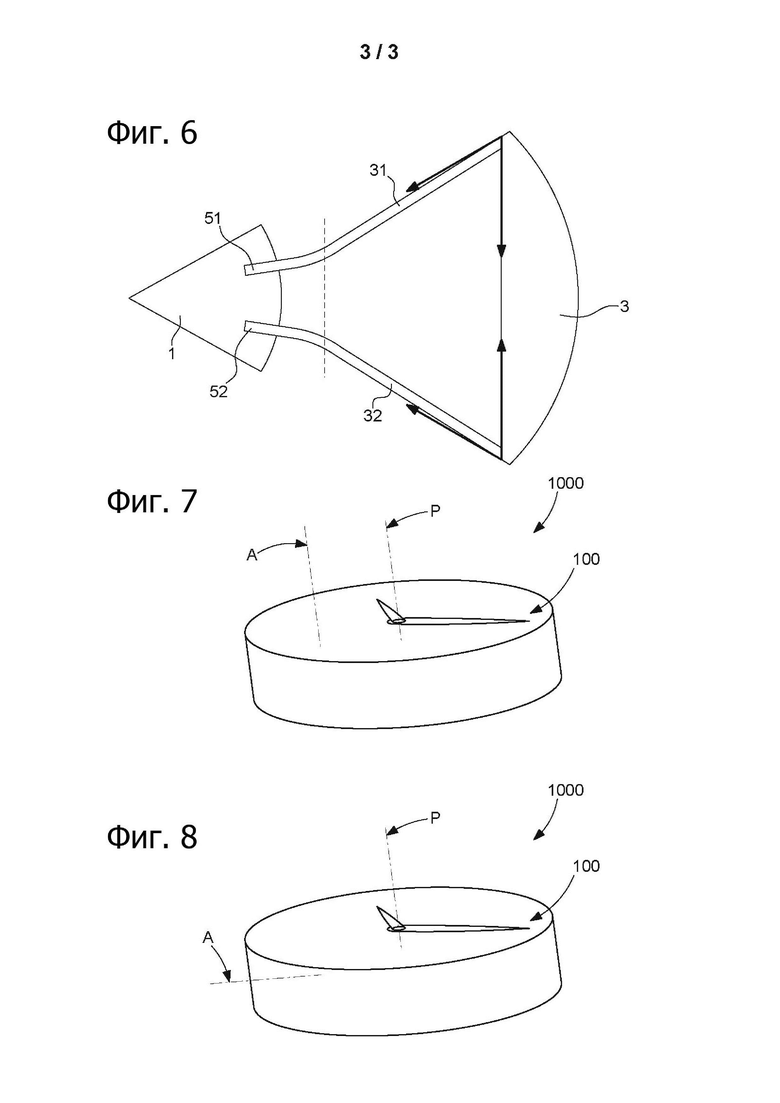
на фиг. 6 - вид в проекции на плоскость второго устройства, содержащего две пластины, образующие шарнир с вынесенным центром податливости (ВЦП) со смещенным центром вращения, в конкретном устройстве, выполненном аналогичным образом для создания возвратного крутящего момента, пропорционального синусу двойного угла поворота;
на фиг. 7 - схематический вид в перспективе часового механизма, содержащего такой поворотный резонатор с центральной осью, параллельной основной оси циферблата часового механизма;
на фиг. 8 - схематический вид в перспективе часового механизма, содержащего такой поворотный резонатор, при этом центральная ось перпендикулярна основной оси циферблата часового механизма.
Осуществление изобретения
Заявка EP16195399 этого же заявителя относится к резонаторному механизму для часового механизма, содержащему входной подвижный компонент, установленный с возможностью поворота вокруг оси вращения и подверженный воздействию крутящего момента, и центральный подвижный компонент, вращающийся как одно целое с этим входным подвижным компонентом вокруг оси вращения и выполненный с возможностью постоянного менять направление. Этот резонаторный механизм содержит множество N инерционных элементов, каждый из которых может двигаться по меньшей мере с одной степенью свободы относительно центрального подвижного компонента и возвращаться к оси вращения под действием упругих возвратных средств, выполненных с возможностью приложения возвратной силы к центру масс инерционного элемента. Этот резонаторный механизм обладает вращательной симметрией порядка N. Этот резонаторный механизм содержит средства динамического соединения между всеми инерционными элементами, которые выполнены с возможностью сохранения всех центров масс инерционных элементов на одинаковом расстоянии от оси вращения все время, и упругие возвратные средства, прикладывающие упругий потенциал, характеризующийся определенным соотношением. Более конкретно, этот резонаторный механизм имеет конструкцию типа пантографа.
Задача заключается в усовершенствовании такого механизма. Более конкретно, крутящий момент и аэродинамическое сопротивление генерируют радиальную силу, которая объединяется с упругим потенциалом и прерывает изохронность.
Настоящим изобретением предложено ориентирование поворота инерционных элементов по-другому: таким образом, чтобы не прерывалась изохронность, посредством привода или посредством тангенциальных аэродинамических сил. На фиг. 1 изображен один вариант резонаторного механизма согласно изобретению, в котором поворот инерционных элементов происходит перпендикулярно повороту привода.
На фиг. 2 показано, что сложное сочленение звеньев механизма, представленного на фиг. 1, которое взято непосредственно из заявки EP16195399, может исчезнуть, уступив место благоприятной и очень простой конструкции: настоящее изобретение обладает преимуществом, заключающимся в объединении приводного подвижного компонента и резонатора в единую целую конструкцию, очень простую в изготовлении.
При использовании этого механизма исключаются толчки и трение, присущие плохо настроенным шлицевым или кривошипным приводным механизмам.
Изобретением исключено, с одной стороны, ненужное увеличение упругих элементов между платиной и инерционным элементом и, с другой стороны, между приводным подвижным компонентом и инерционным элементом.
Таким образом, изобретение относится к механическому часовому механизму 100, содержащему по меньшей мере одно средство 200 хранения энергии, такое как барабан или подобное устройство, выполненное с возможностью привода зубчатой передачи 300, выходной подвижный компонент которой выполнен с возможностью поворота вокруг приводной оси.
Этот механизм 100 содержит поворотный резонатор 10, который содержит по меньшей мере один центральный подвижный компонент 1, выполненный с возможностью поворота вокруг центральной оси A.
Более конкретно, эта центральная ось A параллельна или перпендикулярна приводной оси.
Центральный подвижный компонент 1 содержит входной подвижный компонент 2, выполненный с возможностью взаимодействия с выходным подвижным компонентом.
Согласно изобретению поворотный резонатор 10 содержит по меньшей мере один инерционный элемент 3, выполненный с возможностью поворота относительно центрального подвижного компонента 1 вокруг вторичной оси B, перпендикулярной к центральной оси A и пересекающейся с ней, и возвращаемый в положение покоя, относительно центрального подвижного компонента 1, под действием по меньшей мере одного упругого возвратного элемента 4; причем эта вторичная ось B проходит через центр масс связанного с ней инерционного элемента 3.
Более конкретно, поворотный резонатор 10 содержит множество инерционных элементов 3, каждый из которых выполнен с возможностью поворота относительно центрального подвижного компонента 1 вокруг вторичной оси B, перпендикулярной к центральной оси A и пересекающейся с ней, и возврата в положение покоя, относительно центрального подвижного компонента 1, посредством по меньшей мере одного упругого возвратного элемента 4.
Кроме того, каждая вторичная ось B проходит через центр масс связанного с ней инерционного элемента 3.
Более конкретно, этот по меньшей мере один упругий возвратный элемент 4 выполнен с возможностью приложения к соответствующему инерционному элементу 3 крутящего момента с упругим возвратным моментом, согласно уравнению:
M(θ1)= ½·ω32·(I2-I3)·sin(2θ1),
где: θ1 - угол наклона инерционного элемента 3 относительно его упомянутого положения покоя, которое является его положением равновесия в неподвижном состоянии;
ω3 - угловая скорость центрального подвижного компонента 1, которая, таким образом, является частотой пульсации резонатора;
I2 - момент инерции инерционного элемента 3 относительно поперечной оси E, перпендикулярной и к центральной оси A и к упомянутой вторичной оси B;
I3 - момент инерции инерционного элемента 3 относительно центральной оси A.
Более конкретно, этот поворотный резонатор 10 обладает, в положении покоя, вращательной симметрией относительно центральной оси A порядка N, где N - целое число, большее или равное 2.
Более конкретно упомянутые инерционные элементы 3, которые содержит поворотный резонатор 10, обладают, в положении покоя, вращательной симметрией относительно центральной оси A порядка N, где N - целое число, большее или равное 2.
Более конкретно, также каждый инерционный элемент 3 обладает вращательной симметрией порядка 2 относительно его вторичной оси B.
В альтернативном варианте по меньшей мере один упругий возвратный элемент 4 прикреплен первым концом к центральному подвижному компоненту 1, а вторым концом - к инерционному элементу 3.
В другом альтернативном варианте, который может быть естественно объединен с предыдущим вариантом, по меньшей мере один упругий возвратный элемент 4 прикреплен первым концом к одному инерционному элементу 3, а вторым концом - к другому инерционному элементу 3.
В еще одном альтернативном варианте, показанном на фиг. 3 и 4, каждый упругий возвратный элемент 4 прикреплен первым концом к центральному подвижному компоненту 1, а вторым концом - к инерционному элементу 3.
Более конкретно, и как показано в проиллюстрированных не ограничивающих вариантах осуществления изобретения, все инерционные элементы 3 одного и того же поворотного резонатора 10 выполнены с возможностью поворота вокруг общей вторичной оси B.
В конкретных альтернативных вариантах, показанных на фиг. 3 и 4, по меньшей мере один упомянутый инерционный элемент 3 по меньшей мере в 5 раз больше по длине, чем по ширине, и по меньшей мере в 5 раз больше по ширине, чем по толщине.
В одном предпочтительном варианте осуществления изобретения поворотный резонатор 10 содержит по меньшей мере одну гибкую направляющую для обеспечения поворотного и упругого возврата по меньшей мере одного инерционного элемента 3 относительно центрального подвижного компонента 1.
Эта гибкая направляющая может быть выполнена различными способами: в виде гибких пластин или пластин, имеющих шейку, расположенных таким образом, чтобы они перекрещивались в плоскости или в плоскостях, являющихся параллельными, но чтобы они перекрещивались в проекции на одну из этих параллельных плоскостей, или альтернативно были расположены в конфигурации с вынесенным центром податливости (ВЦП), что означает со смещенным центром вращения, где пластины вместе образуют клиновидный элемент или другую конфигурацию.
Использование таких гибких направляющих для выполнения функции направления вращения и упругого возврата обеспечивает возможность исключения трения, существующего в традиционном шарнире вал-опора или подобном устройстве.
Согласно одному варианту осуществления изобретения эти гибкие направляющие могут быть прикреплены к центральному подвижному компоненту 1 и/или к инерционному элементу 3 или могут быть выполнены за одно целое по меньшей мере с одним из этих двух компонентов или с обоими компонентами. Варианты осуществления изобретения, в которых гибкие направляющие выполнены за одно целое, могут быть изготовлены из микро-машинообрабатываемого материала, полученного с использованием процессов “Liga”, или “Mems”, или подобного процесса; могут быть изготовлены, по меньшей мере частично, из аморфного материала, из кремния и оксида кремния, из “АПУ” (алмазоподобного углерода) или из подобного материала.
Более конкретно, эта гибкая направляющая является шарниром с пластинами, которые либо перекрещены копланарно, либо перекрещены в проекции на плоскость проекции, перпендикулярной к центральной оси A, как в варианте осуществления изобретения, представленном на фиг. 4. Посредством использования такой конфигурации могут быть обеспечены благоприятные условия, заключающиеся в гарантировании превосходных эксплуатационных характеристик.
Это благоприятно для того, чтобы общий центр масс оставался фиксированным и чтобы объединенный эффект каких-либо нежелательных смещений отдельных центров масс инерционных элементов при их повороте приводил к их взаимному погашению. Это означает, что общий центр масс всего поворотного резонатора 10 остается фиксированным, независимо от амплитуды. Это может быть достигнуто, в частности, посредством объединения геометрической вращательной симметрии и выбора гибких направляющих, являющихся идентичными для всего поворотного резонатора 10: каждый инерционный элемент 3, из которых он собран, возвращается под действием той же самой гибкой направляющей.
Использование перекрещенных пластин конкретных геометрических форм обеспечивает дополнительную возможность гарантирования того, что возвратный крутящий момент, приложенный посредством гибкой направляющей к каждому из инерционных элементов, будет пропорционален синусу двойного угла поворота этого инерционного элемента 3.
Две частные, совершенно не ограничивающие конструкции описаны ниже для пояснения способов достижения этого.
На фиг. 5 показан асимметричный шарнир из перекрещенных пластин: эта гибкая направляющая выполнена с возможностью сообщения инерционному элементу 3 возвратного крутящего момента, пропорционального синусу двойного угла поворота упомянутого инерционного элемента 3. Эта гибкая направляющая содержит две асимметричные гибкие пластины 31, 32, каждая из которых соединяет первую заделку 41, 42 центрального подвижного компонента 1 со второй заделкой 51, 52 инерционного элемента 3. Эти первые заделки 41, 42 определяют вместе со вторыми соответствующими заделками 51, 52 два направления DL1, DL2 основных пластин. Каждый из центрального подвижного компонента 1 и инерционного элемента 3 является более жесткими, чем каждая из гибких пластин 31, 32. Направлениями DL1, DL2 двух основных пластин определена теоретическая ось D поворота, где они перекрещиваются, когда две гибкие пластины 31, 32 являются копланарными, или где их проекции на плоскость проекции перекрещиваются, когда две гибкие пластины 31, 32 простираются на двух уровнях, параллельных плоскости проекции, но не являются копланарными плоскостями, как в случае, представленном на фиг. 4, и когда угол α при вершине треугольника равен 112,5°. Вторая пластина 32 из этих пластин имеет, между ее противоположными заделками, вторую общую длину L2, которая в три раза больше первой общей длины L1 первой пластины 31 из этих пластин. Кроме того, расстояния между первыми заделками 41, 42 и теоретической осью D поворота составляют: для второй пластины 32 второе осевое расстояние D2, равное 0,875 от второй общей длины L2, а для первой пластины 31 первое осевое расстояние D1 равно 0,175 от первой общей длины L1.
На фиг. 6 показана конфигурация с вынесенным центром податливости (ВЦП), со смещенным центром вращения, которую не изготавливают в виде единой детали, а в форме, в которой пластины сжаты под небольшим углом вблизи по меньшей мере одного из их концов, например, посредством выполнения прорези, смещенной в боковом направлении относительно теоретического направления пластины. Гибкая направляющая, выполненная в виде такого специального шарнира с вынесенным центром податливости (ВЦП), таким образом, обеспечивает возможность создания крутящего момента, пропорционального синусу двойного угла, где упомянутую гибкую направляющую изготавливают в виде шарнира с пластинами с вынесенным центром податливости (ВЦП), представляющего виртуальный шарнир, в котором введение пластин 31, 32 в посадочные места 51, 52, которые содержит упомянутый центральный подвижный компонент 1 и/или упомянутый инерционный элемент 3, происходит в результате угловой предварительной нагрузки, составляющей 0,15 радиан, со скручиванием на заделке, при этом угол при вершине треугольника, образованный направлениями введения упомянутых пластин 31, 32, в упомянутом виртуальном шарнире составляет 52,642°, а расстояние между упомянутым виртуальным шарниром и ближайшей заделкой равен 0,268864 длины каждой из упомянутых пластин 31, 32, которые в данном случае являются идентичными; между их заделками в ненагруженном состоянии до предварительной нагрузки их конца.
Более конкретно, эту гибкую направляющую термически компенсируют.
Более конкретно, также эта гибкая направляющая содержит пластины, изготовленные из оксидированного кремния, на которых различный рост диоксида кремния во время термической обработки обеспечивает возможность того, что элементы небольшого поперечного сечения, такие, как пластины в едином узле, могут быть предварительно напряжены в высокой степени.
В альтернативном варианте, представленном на фиг. 1, поворотный резонатор 10 содержит сочлененные с некоторыми инерционными элементами 3 дополнительные динамические соединительные элементы 5, которые с этими инерционными элементами 3 составляют шарнирную конструкцию типа пантографа и которые предназначены для увеличения радиального развертывания упомянутого поворотного резонатора 10 посредством ограничения его высоты вдоль центральной оси A.
В альтернативном варианте, представленном на фиг. 7, механизм 100 содержит по меньшей мере одну основную ось P циферблата для размещения используемых стрелок или дисков и центральную ось A, параллельную этой основной оси P.
В альтернативном варианте, представленном на фиг. 8, центральная ось A является в этом случае перпендикулярной к основной оси P.
Например, выходной подвижный компонент зубчатой передачи 300 является червяком, предназначенным для взаимодействия с зубчатым колесом, которое составляет входной подвижный компонент 2.
В частности, поворотный резонатор 10 содержит только два или три инерционных элемента 3. Более конкретно, компромисс должен быть достигнут между работоспособностью и габаритами, и при использовании резонатора, содержащего два инерционных элемента, обладающего вращательной симметрией, достигается требуемая работоспособность.
В предпочтительном альтернативном варианте осуществления изобретения поворот центрального подвижного компонента 1 происходит по меньшей мере на одном магнитном шарнире, чтобы таким образом достигалась наибольшая эффективность.
Изобретение также относится к механическим наручным или карманным часам 1000, содержащим по меньшей мере один такой механизм.
Настоящим изобретением предложены существенные преимущества:
- при его использовании исключается работа сил трения в шарнирах, имеющих место при использовании обычного баланса с волоском, для повышения показателя качества резонатора;
- при его использовании исключается толчкообразное движение спускового механизма для повышения эффективности спускового механизма;
- при его использовании увеличивается срок службы современных механических наручных или карманных часов;
- при его использовании повышается точность хода современных механических наручных или карманных часов.
Для данного размера механизма можно ожидать, что независимая работа наручных или карманных часов будет пятикратно повышена, и можно ожидать, что сила регулирования наручных или карманных часов будет удвоена. Это позволяет утверждать, что изобретением обеспечивается возможность 10-кратного улучшения действия механизма.
Изобретение относится к наручным или карманным часам, содержащим часовой механизм. Механический часовой механизм (100) содержит средство хранения энергии, выполненное с возможностью привода зубчатой передачи, выходной подвижный компонент которой выполнен с возможностью поворота вокруг центральной оси, и содержит поворотный резонатор (10). При этом резонатор содержит центральный подвижный компонент (1), выполненный с возможностью поворота вокруг центральной оси (A) и содержащий входной подвижный компонент (2). Причем резонатор (10) содержит множество инерционных элементов (3), каждый из которых выполнен с возможностью поворота относительно центрального подвижного компонента (1) вокруг вторичной оси (B), перпендикулярной к центральной оси (A), и возвращается в положение покоя относительно центрального подвижного компонента (1) посредством упругого возвратного элемента (4), при этом каждая вторичная ось (B) проходит через центр масс инерционного элемента (3), связанного с ней. Техническим результатом является исключение трения в шарнирах и толчкообразного движения спускового механизма с целью повышения показателя качества резонатора и эффективности спускового механизма, увеличение срока службы и повышение точности хода. 2 н. и 23 з.п. ф-лы, 8 ил.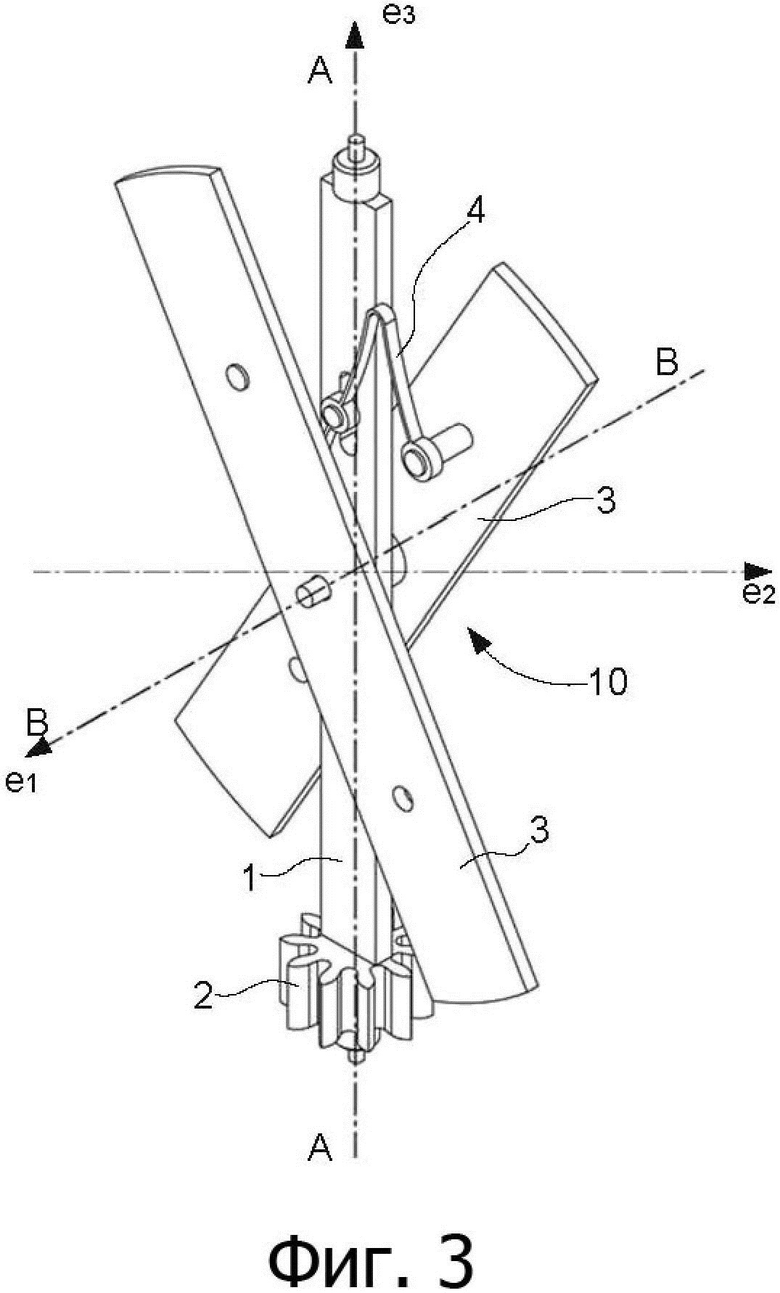
1. Механический часовой механизм (100), содержащий по меньшей мере одно средство (200) хранения энергии, выполненное с возможностью привода зубчатой передачи (300), выходной подвижный компонент которой выполнен с возможностью поворота относительно приводной оси, и содержащий поворотный резонатор (10), который содержит по меньшей мере один центральный подвижный компонент (1), выполненный с возможностью поворота вокруг центральной оси (A) и содержащий входной подвижный компонент (2), выполненный с возможностью взаимодействия с упомянутым выходным подвижным компонентом, отличающийся тем, что упомянутый поворотный резонатор (10) содержит по меньшей мере один инерционный элемент (3), выполненный с возможностью поворота относительно центрального подвижного компонента (1) вокруг вторичной оси (B), перпендикулярной к упомянутой центральной оси (A) и пересекающейся с ней, и возвращаемый в положение покоя относительно упомянутого центрального подвижного компонента (1) посредством по меньшей мере одного упругого возвратного элемента (4), и дополнительно отличающийся тем, что упомянутая вторичная ось (B) проходит через центр масс упомянутого инерционного элемента (3), связанного с ней.
2. Механизм (100) по п. 1, отличающийся тем, что упомянутый поворотный резонатор (10) содержит множество инерционных элементов (3), каждый из которых выполнен с возможностью поворота относительно центрального подвижного компонента (1) вокруг вторичной оси (B), перпендикулярной к упомянутой центральной оси (A) и пересекающейся с ней; причем каждый из них является возвращаемым в положение покоя относительно упомянутого центрального подвижного компонента (1) посредством по меньшей мере одного упругого возвратного элемента (4); при этом каждая упомянутая вторичная ось (B) проходит через центр масс упомянутого инерционного элемента (3), связанного с ней.
3. Механизм (100) по п. 1, отличающийся тем, что упомянутый по меньшей мере один упругий возвратный элемент (4) выполнен с возможностью приложения к упомянутому инерционному элементу (3) крутящего момента с упругим возвратным моментом согласно уравнению:
M(θ1)= ½·ω32·(I2-I3)·sin(2θ1),
где: θ1 - угол наклона инерционного элемента (3) относительно его упомянутого положения покоя, которое является его положением равновесия в неподвижном состоянии;
ω3 - угловая скорость упомянутого центрального подвижного компонента (1);
I2 - момент инерции упомянутого инерционного элемента (3) относительно поперечной оси (E), перпендикулярной как к упомянутой центральной оси (A), так и к упомянутой вторичной оси (B);
I3 - момент инерции инерционного элемента (3) относительно упомянутой центральной оси (A).
4. Механизм (100) по п. 1, отличающийся тем, что упомянутый поворотный резонатор (10) обладает в положении покоя вращательной симметрией относительно упомянутой центральной оси (A) порядка N, где N больше или равно 2.
5. Механизм (100) по п. 2, отличающийся тем, что упомянутые инерционные элементы (3), которые содержит упомянутый поворотный резонатор (10), обладают в положении покоя вращательной симметрией относительно упомянутой центральной оси (A) порядка N, где N больше или равно 2.
6. Механизм (100) по п. 1, отличающийся тем, что по меньшей мере один упомянутый инерционный элемент (3) обладает вращательной симметрией порядка 2 относительно его упомянутой вторичной оси (B).
7. Механизм (100) по п. 6, отличающийся тем, что каждый упомянутый инерционный элемент (3) обладает вращательной симметрией порядка 2 относительно его упомянутой вторичной оси (B).
8. Механизм (100) по п. 1, отличающийся тем, что по меньшей мере один упомянутый упругий возвратный элемент (4) прикреплен первым концом к упомянутому центральному подвижному компоненту (1), а вторым концом - к упомянутому инерционному элементу (3).
9. Механизм (100) по п. 1, отличающийся тем, что по меньшей мере один упомянутый упругий возвратный элемент (4) прикреплен первым концом к одному упомянутому инерционному элементу (3), а вторым концом - к другому упомянутому инерционному элементу (3).
10. Механизм (100) по п. 8, отличающийся тем, что каждый упомянутый упругий возвратный элемент (4) прикреплен первым концом к упомянутому центральному подвижному компоненту (1), а вторым концом - к упомянутому инерционному элементу (3).
11. Механизм (100) по п. 1, отличающийся тем, что все упомянутые инерционные элементы (3) выполнены с возможностью поворота вокруг общей вторичной оси (B).
12. Механизм (100) по п. 1, отличающийся тем, что по меньшей мере один упомянутый инерционный элемент (3) по меньшей мере в 5 раз больше по длине, чем по ширине, и по меньшей мере в 5 раз больше по ширине, чем по толщине.
13. Механизм (100) по п. 1, отличающийся тем, что упомянутый поворотный резонатор (10) содержит по меньшей мере одну гибкую направляющую для обеспечения поворота и упругого возврата по меньшей мере одного упомянутого инерционного элемента (3) относительно упомянутого центрального подвижного компонента (1).
14. Механизм (100) по п. 13, отличающийся тем, что упомянутая гибкая направляющая является шарниром с пластинами, которые либо перекрещены в одной плоскости, либо перекрещены в проекции на плоскость проекции, перпендикулярной к упомянутой центральной оси (A), либо выполнены с вынесенным центром податливости (ВЦП) со смещенным центром вращения.
15. Механизм (100) по п. 13, отличающийся тем, что упомянутая гибкая направляющая выполнена с возможностью сообщения упомянутому инерционному элементу (3) возвратного крутящего момента, пропорционального синусу двойного угла поворота упомянутого инерционного элемента (3).
16. Механизм (100) по п. 14, отличающийся тем, что упомянутая гибкая направляющая выполнена с возможностью сообщения упомянутому инерционному элементу (3) возвратного крутящего момента, пропорционального синусу двойного угла поворота упомянутого инерционного элемента (3); при этом упомянутая гибкая направляющая содержит две асимметричные гибкие пластины (31, 32), каждая из которых соединяет первую заделку (41, 42) упомянутого центрального подвижного компонента (1) со второй заделкой (51, 52) упомянутого инерционного элемента (3); причем упомянутыми первыми заделками (41, 42) совместно с упомянутыми вторыми соответствующими заделками (51, 52) определены направления (DL1; DL2) двух основных пластин; при этом каждый из упомянутого центрального подвижного компонента (1) и упомянутого инерционного элемента (3) является более жестким, чем каждая из упомянутых гибких пластин (31, 32); причем упомянутыми направлениями (DL1; DL2) двух основных пластин определена теоретическая ось (D) поворота, где они перекрещиваются, когда упомянутые две гибкие пластины (31, 32) являются копланарными или где их проекции на упомянутую плоскость проекции перекрещиваются, когда упомянутые две гибкие пластины (31, 32) простираются в двух уровнях, параллельных упомянутой плоскости проекции, но не являются копланарными; причем угол (α) при вершине треугольника равен 112,5°; при этом вторая пластина (32) из упомянутых пластин имеет между ее противоположными заделками вторую общую длину (L2), которая в три раза больше первой общей длины (L1) первой пластины (31) из упомянутых пластин; причем расстояния между упомянутыми первыми заделками (41, 42) и упомянутой теоретической осью (D) поворота по отношению к упомянутой второй пластине (32) из упомянутых пластин составляет второе осевое расстояние (D2), равное 0,875 от упомянутой второй общей длины (L2), а по отношению к упомянутой первой пластине (31) из упомянутых пластин составляет первое осевое расстояние (D1), равное 0,175 от упомянутой первой общей длины (L1).
17. Механизм (100) по п. 13, отличающийся тем, что упомянутая гибкая направляющая выполнена в виде шарнира с пластинами с вынесенным центром податливости (ВЦП), представляющего виртуальный шарнир, в котором введение пластин (31, 32) в посадочные места (51, 52), которые содержит упомянутый центральный подвижный компонент (1) или упомянутый инерционный элемент (3), происходит в результате угловой предварительной нагрузки в 0,15 радиан; при этом угол при вершине треугольника, образованный направлениями введения упомянутых пластин (31, 32), в упомянутом виртуальном шарнире составляет 52,642°, причем расстояние между упомянутым виртуальным шарниром и ближайшей заделкой равно 0,268864 длины каждой из упомянутых пластин (31, 32) между их заделками в ненагруженном состоянии до предварительной нагрузки их конца.
18. Механизм (100) по п. 13, отличающийся тем, что упомянутая гибкая направляющая термически компенсирована и содержит пластины, изготовленные из оксидированного кремния.
19. Механизм (100) по п. 1, отличающийся тем, что упомянутый поворотный резонатор (10) содержит сочлененные с некоторыми из упомянутых инерционных элементов (3) дополнительные динамические соединительные элементы (5), которые с упомянутыми инерционными элементами (3) составляют конструкцию типа пантографа и которые предназначены для увеличения радиального развертывания упомянутого поворотного резонатора (10) посредством ограничения его высоты вдоль упомянутой центральной оси (A).
20. Механизм (100) по п. 1, отличающийся тем, что он содержит по меньшей мере одну основную ось (P) циферблата для отображения с помощью стрелок или дисков, при этом упомянутая центральная ось (A) параллельна упомянутой основной оси (P).
21. Механизм (100) по п. 1, отличающийся тем, что он содержит по меньшей мере одну основную ось (P) циферблата для отображения с помощью стрелок или дисков, при этом упомянутая центральная ось (A) перпендикулярна к упомянутой основной оси (P).
22. Механизм (100) по п. 1, отличающийся тем, что упомянутый выходной подвижный компонент упомянутой зубчатой передачи (300) является червяком.
23. Механизм (100) по п. 1, отличающийся тем, что упомянутый поворотный резонатор (10) содержит только два или три упомянутых инерционных элемента (3).
24. Механизм (100) по п. 1, отличающийся тем, что поворот упомянутого центрального подвижного компонента (1) происходит по меньшей мере на одном магнитном шарнире.
25. Механические часы (1000), содержащие по меньшей мере один механизм (100) по п. 1.
| EP 3054356 A1, 10.08.2016 | |||
| ВЕСОВОЕ УСТРОЙСТВО | 0 |
|
SU293180A1 |
| Роторный снегоочиститель | 1977 |
|
SU699081A1 |
| US 7950846 B2, 31.05.2011. | |||

