Область техники, к которой относится изобретение
Изобретение относится к часовому механизму для механических часов, содержащему размещенные на основной плате резонатор и спусковой механизм, подвергаемый крутящему моменту, создаваемому соответствующим приводным средством, причем указанный резонатор содержит инерционный элемент, приспособленный совершать колебания относительно указанной платы под действием упругого возвратного устройства, прямо или косвенно закрепленного на указанной плате, причем указанный инерционный элемент приспособлен совершать поворот вокруг главной оси и вступать во взаимодействие с одним колесом из комплекта анкерных колес, предусмотренного в указанном спусковом механизме.
Изобретение также относится к механическим часам, содержащим, по меньшей мере, один указанный часовой механизм.
Изобретение, к тому же, относится к области резонаторов, формирующих временные базы механических часов.
Уровень техники
В большинстве своем современные механические часы содержат резонатор с подпружиненным балансиром, который формирует временную базу часов, и спусковой механизм, как правило, швейцарский анкерный ход, который выполняет две основные функции:
- поддержание возвратно-поступательных движений резонатора;
- подсчет указанных возвратно-поступательных движений.
Спусковой механизм должен быть надежным в эксплуатации, стойким к ударному воздействию и предотвращающим заклинивание движения (переброс вилки).
Механический резонатор сочетает в себе, по меньшей мере, один инерционный элемент и один упругий возвратный элемент. В резонаторе с подпружиненным балансиром спиральная пружина действует как упругий возвратный элемент для инерционного элемента.
Балансир совершает регулируемое поворотное движение на оси, установленной в отшлифованных рубиновых подшипниках. При этом возникает трение, а, следовательно, потери энергии и нарушение режима работы, что требует устранения. Указанные потери энергии оказывают отрицательное влияние на добротность (Q) системы. Следовательно, возникает необходимость в максимизации добротности (Q).
Швейцарский анкерный ход имеет низкую энергоэффективность (около 30%). Низкая эффективность связана с тем, что спусковой механизм совершает прерывистое движение с «перепадами» (связанное с погрешностями обработки), а также с тем, что передача движения некоторых компонентов обеспечивается за счет трения их наклонных поверхностей.
В патентной заявке EP 2908189, поданной от имени ETA Manufacture Horlogère Suisse, раскрывается механизм синхронизации двух часовых осцилляторов с зубчатой передачей, причем часовой регулирующий механизм содержит анкерное колесо, предназначенное совершать, по меньшей мере, одно поворотное движение относительно платы и приспособленное воспринимать крутящий момент от привода через зубчатую передачу, а также содержит первый осциллятор, включающий первую жесткую структуру, соединенную с платой с помощью первого упругого возвратного средства. Указанный регулирующий механизм содержит второй генератор, который включает вторую жесткую структуру, соединенную с первой жесткой структурой с помощью второго упругого возвратного средства, а также содержит направляющие средства, приспособленные взаимодействовать с предусмотренными в анкерном колесе дополнительными направляющими средствами для синхронизации действий первого генератора и второго генератора с зубчатой передачей.
В патентной заявке ЕР 3054358, поданной от имени ETA Manufactory Horlogère Suisse, описывается часовой осциллятор, который содержит некоторую структуру и разные первичные резонаторы с фазовым и геометрическим сдвигом, каждый из которых содержит инерционную массу, возвращаемую к указанной структуре посредством упругого возвратного средства. Указанный часовой осциллятор содержит соединительные средства, обеспечивающие взаимодействие первичных резонаторов и включающие приводные средства, предназначенные приводить в движение колесную систему, которая включает приводные и направляющие средства, предназначенные приводить в действие и направлять регулирующие средства, шарнирно соединенные с приводными средствами, каждое из которых шарнирно соединено с инерционной массой соответствующего первичного резонатора в отдалении от регулирующих средств, причем первичные резонаторы и колесная система расположены так, чтобы шарнирные оси любых двух из первичных резонаторов и шарнирная ось управляющего устройства никогда не были компланарными.
Раскрытие изобретения
Задачей настоящего изобретения является усовершенствование часового механизма путем обеспечения между изохронным резонатором и спусковым механизмом часового механизма взаимосвязи, исключающей трение, присущее обычным шарнирам, а также исключающей прерывистое движение, присущее традиционному спусковому механизму, что позволяет повысить добротность и эффективность резонатора.
Поставленная задача решается посредством резонатора согласно настоящему изобретению, в котором упругий возвратный элемент, являясь структурным элементом, выполняет также функцию опорного элемента, обеспечивающего непрерывное взаимодействие резонатора с анкерным колесом без прерывистых движений. Это достигается благодаря тому, что резонатор имеет, по меньшей мере, две степени свободы, при этом вторая степень свободы не совпадает по фазе с первой степенью свободы. Точнее говоря, предусмотрены две степени свободы поворота, оси которого проходят через центр масс инерционного элемента, чтобы резонатор не был чувствителен к гравитации или к ударному воздействию.
Из вышесказанного следует, что настоящее изобретение относится к часовому механизму для механических часов, содержащему размещенные на плате резонатор и спусковой механизм, подвергаемый крутящему моменту, создаваемому приводным средством, предусмотренным в указанном механизме, причем указанный резонатор содержит инерционный элемент, приспособленный совершать колебания относительно указанной платы, при этом инерционный элемент подвергается действию упругого возвратного устройства, прямо или косвенно закрепленного на указанной плате, причем указанный инерционный элемент приспособлен поворачиваться вокруг главной оси и взаимодействовать с одним колесом из комплекта анкерных колес, предусмотренного в указанном спусковом механизме, отличающемуся тем, что указанное колесо из комплекта анкерных колес включает приводное средство, приспособленное взаимодействовать с предусмотренным в инерционном элементе дополнительным непрерывным приводным средством для непрерывной передачи движения при каждом угловом положении инерционного элемента, и отличающемуся тем, что указанное упругое возвратное устройство приспособлено возвращать указанное дополнительное непрерывное приводное средство к главной оси, а также отличающемуся тем, что указанное упругое возвратное устройство содержит первый упругий возвратный элемент, размещенный вблизи первой оси и приспособленный возвращать указанное дополнительное непрерывное приводное средство к главной оси, и второй упругий возвратный элемент, размещенный вблизи второй оси и приспособленный возвращать указанное дополнительное непрерывное приводное средство к указанной главной оси, причем указанная первая ось и указанная вторая ось перпендикулярны друг другу и указанной главной оси, к тому же, отличающегося тем, что указанное упругое возвратное устройство формирует направляющие средства карданного типа для блокировки трех степеней свободы линейного перемещения и одной степени свободы поворота центра инерции указанного инерционного элемента, чтобы инерционный элемент, поворачивающийся вокруг центральной точки, определяющей фиксированное положение указанного центра инерции относительно указанной платы, имел только две степени свободы поворота, а именно, вокруг первой оси и второй оси.
Изобретение также относится к механическим часам, включающим, по меньшей мере, один указанный механизм.
Краткое описание чертежей
Другие признаки и преимущества изобретения будут очевидными из нижеприведенного подробного описания осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
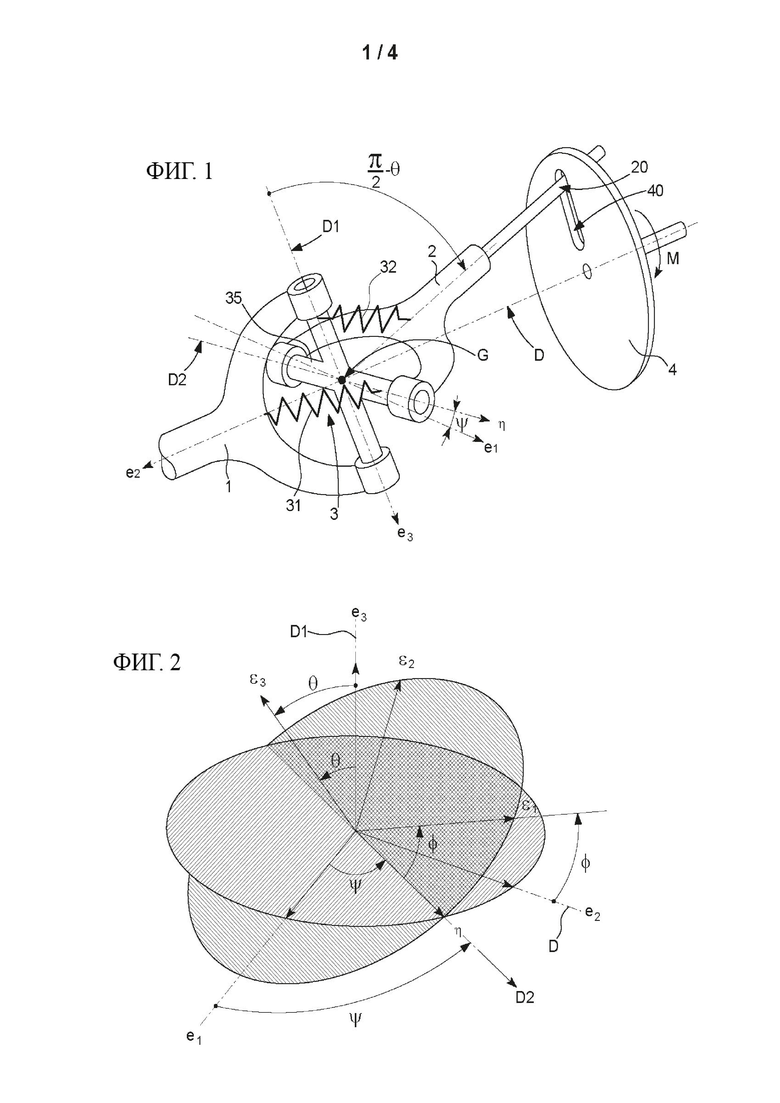
на фиг. 1 - схематичный вид в перспективе участка часового механизма согласно одному из вариантов осуществления изобретения, содержащего резонатор с гибким универсальным шарниром, устройство непрерывного поддержания энергии, а также содержащего упругое возвратное устройство и направляющие средства, которые отличаются друг от друга;
на фиг. 2 - схематичный вид в перспективе углов Эйлера в теоретической системе координат, которая используется для математического расчета изохронности в нижеследующем описании;
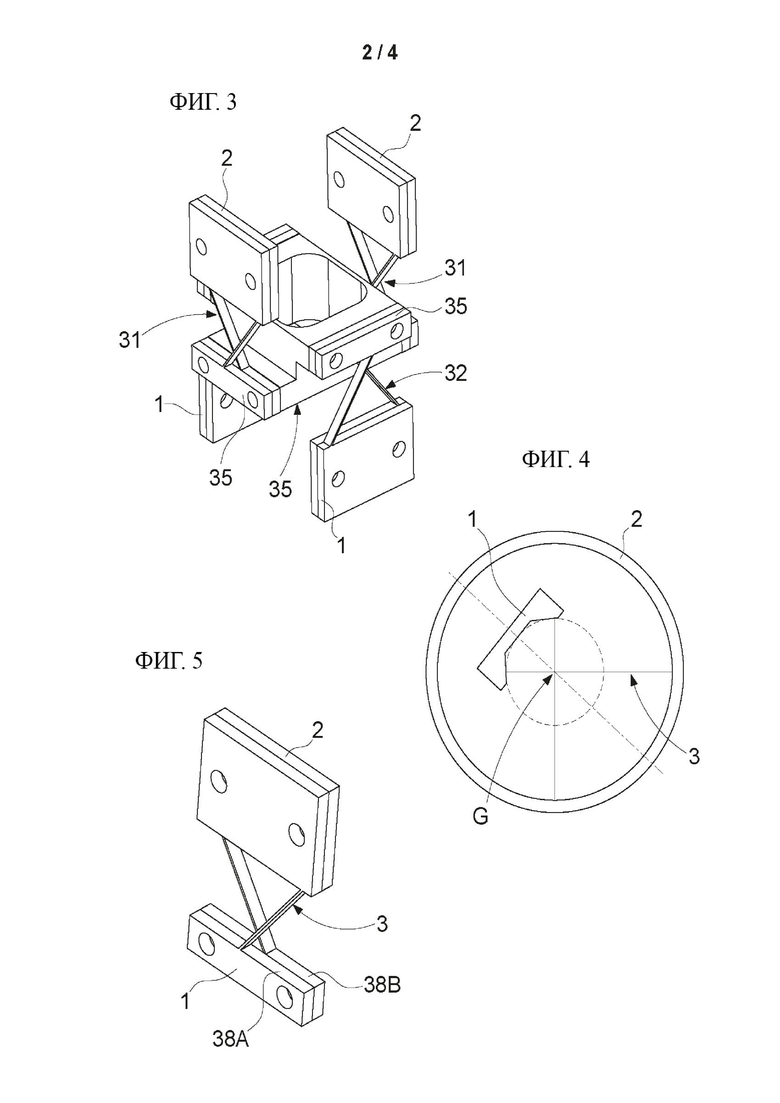
на фиг. 3 - схематичное изображение в перспективе участка поворотных монолитных шарнирных конструкций или гибких направляющих средств с пересекающимися гибкими лентами (способ изготовления которых не ограничивает изобретение), формирующими в резонаторе согласно изобретению упругие соединения, с одной стороны, между платой и промежуточной поперечиной, а, с другой стороны, между указанной промежуточной поперечиной и инерционным элементом;
на фиг. 4 - схематичный вид сверху поворотной гибкой опоры, в частности, с гибкими лентами, пересекающимися в проекции под определенным углом при определенном положении оси пересечения лент и создающими упругие соединения между двумя твердыми телами, что позволяет обеспечить превосходную изохронность;
на фиг. 5 - схематичный вид в перспективе варианта опоры с пересекающимися в проекции лентами, которые соединены с двумя идентичными пластинами, установленными «спина к спине»;
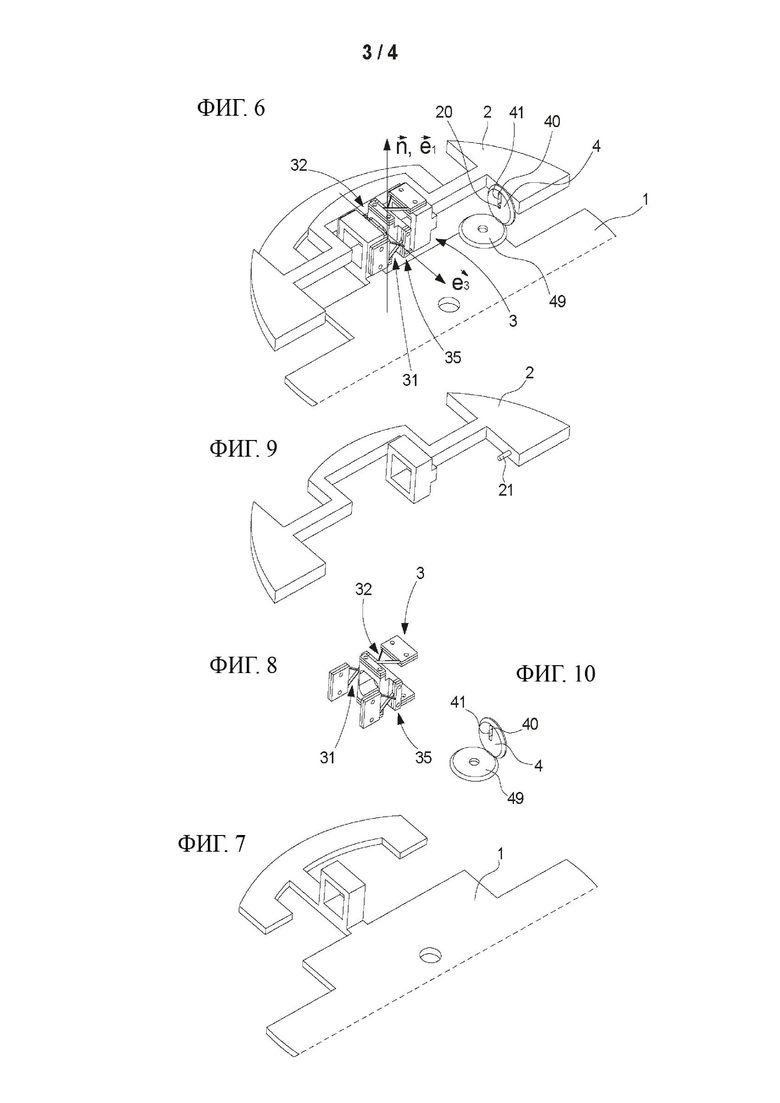
на фиг. 6 - схематичный вид в перспективе часового механизма согласно одному из вариантов осуществления изобретения, который содержит направляющие средства, объединенные с упругим возвратным устройством, а также содержит резонатор с гибким универсальным шарниром, установленным на плате, представленной на фиг. 7, и с поворотными гибкими направляющими средствами, в частности, с упругими соединениями, показанными на фиг. 3 и фиг. 8, кроме того, содержит показанный на фиг. 9 инерционный элемент с пальцем, взаимодействующим с прорезью в коронном колесе, входящем в комплект анкерных колес и взаимодействующем, как показано на фиг. 10, посредством косых зубцов с концом зубчатой передачи, подвергаемой крутящему моменту, создаваемому барабаном, который не показан на чертежах;
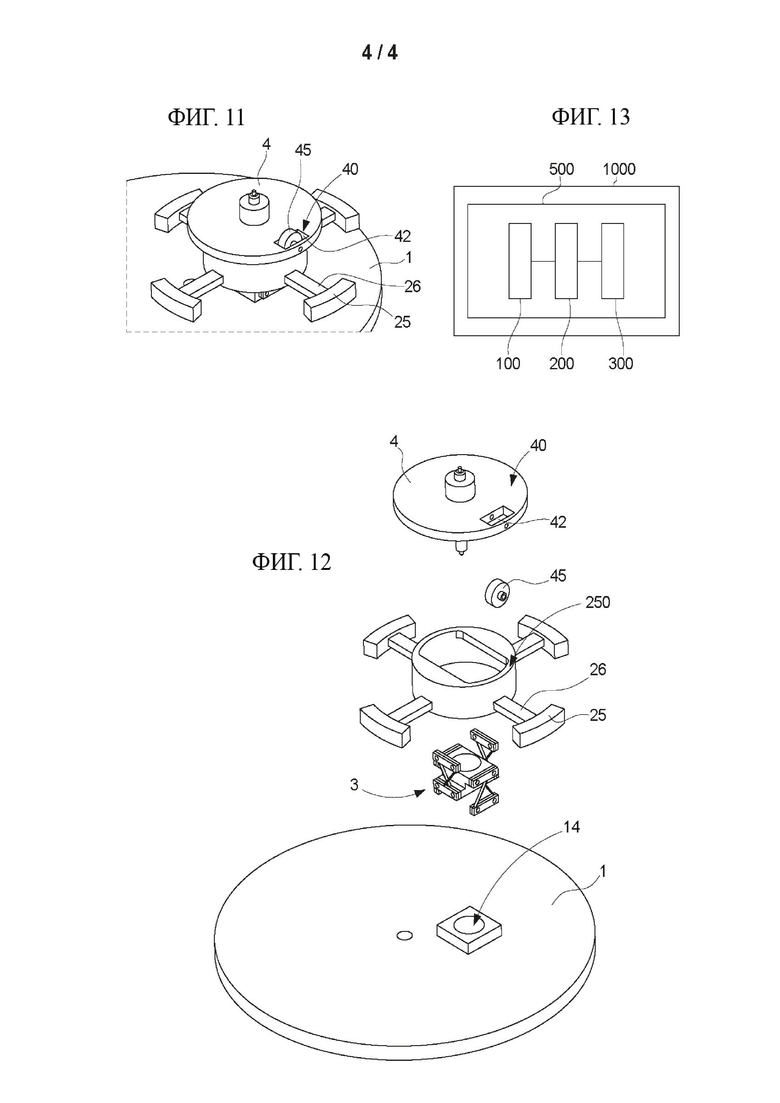
на фиг. 11 и 12 - схематичный вид в перспективе часового механизма согласно другому варианту осуществления изобретения, который содержит направляющие средства, объединенные с упругим возвратным устройством, и на фиг. 11 показан в собранном виде, а на фиг. 12 показан в разобранном виде, причем плата несет посредством вращающихся гибких направляющих средств, в частности, гибких соединений, согласно фиг. 3, по существу крестообразный инерционный элемент, содержащий верхнюю кольцевую направляющую, по которой катится ролик, вмещающийся в выемку одного колеса из набора анкерных колес, которое вращается внутри корпуса под действием барабана (не представленного на чертежах), причем ролик прикладывает эксцентрическую силу к инерционному элементу, приводя последний в прецессионное вращательное движение;
на фиг. 13 - блок-схема часов, содержащих указанный часовой механизм.
Осуществление изобретения
Изобретение относится к механическим часам 1000, которые снабжены механизмом 500, включающим размещенные на плате 1 резонатор 100 с гибким универсальным шарниром и механизм 200 непрерывного поддержания энергии, подвергаемый крутящему моменту, создаваемому приводным средством 300 (см. фиг. 13).
Гибкий универсальный шарнир, показанный на фиг. 1 и подробно описываемый ниже, выполняет функцию блокировки трех прямолинейных перемещений и первого поворота инерционного элемента 2 резонатора 100 относительно платы 1, в то время как сохраняется возможность второго и третьего «гибких» поворотов.
Оси «гибких» поворотов перпендикулярны и проходят через центр G масс инерционного элемента 2 резонатора 100.
Изобретение описывается на примере одного инерционного элемента 2, не являющегося ограничительным.
На чертежах, иллюстрирующих механизмы, показана главная ось D, первая ось D1 и вторая ось D2.
На фиг. 2 представлено общепринятое изображение углов Эйлера. Обычные направления Эйлера соответствуют физическим осям в соответствии с правилом:
D = e2;
D1 = e3;
D2 = n.
Согласно изобретению, гибкий универсальный шарнир содержит:
- по меньшей мере, одну первую безосевую гибкую поворотную опору, которая приспособлена совершать поворот вокруг оси вращения D1 = e3 и с одной стороны соединена с платой 1, а с другой стороны соединена с промежуточным компонентом 35, называемым поперечиной;
- по меньшей мере, вторую гибкую безосевую гибкую поворотную опору, которая приспособлена совершать поворот вокруг оси вращения n (именуемой линией узлов) и с одной стороны соединена с поперечиной 35, а с другой стороны соединена с инерционным элементом 2 резонатора 100.
Согласно изобретению, указанные гибкие поворотные направляющие средства, благодаря упругости, создают возвратный крутящий момент, пропорциональный углу поворота при соответствующем вращении.
Согласно изобретению, инерционный элемент 2 имеет матрицу тензора инерции, компоненты которой в направлениях e2 и e3, по существу, идентичны.
Указанные выше два признака позволяют получить изохронность системы, независимо от траектории инерциального элемента 2.
Действительно, указанные признаки упрощают общий лагранжиан, обычно обозначаемый заглавной буквой L, а в описании изобретения обозначенный «Lag», который представляет собой разность между кинетической энергией Ec = T (энергией движения) и потенциальной энергий Ep = V (энергией положения) системы:
Lag (θ, φ, ψ) = T (θ, φ, ψ) - V (θ, φ, ψ),
с:
T =
½ I1 (dθ/dt.cosφ + dψ/dt.sinθ.sinφ)2
+ ½ I2 (-dθ/dt.sinφ + dψ/dt.sinθ.cosφ)2
+ ½ I3 (dφ/dt + dψ/dt.cosθ)2
При блокировке одного из поворотов, согласно представленному варианту осуществления настоящего изобретения φ = 0 (является постоянным), что упрощает выражение лагранжиана:
Lag (θ, φ, ψ) =
½ I1 (dθ/dt)2 + ½ I2 (dψ/dt)2.sin2θ + ½ I3 (dψ/dt)2.cos2θ + ½ Cθ.θ2 + ½ Cψ.Ψ2
если I2 = I3 = I23, тогда:
Lag (θ, φ, ψ) = ½ I1 (dθ/dt)2 + ½ I23 (dψ/dt)2 + ½ Cθ.θ2 + ½ Cψ.Ψ2,
что соответствует лагранжиану двух изохронных осцилляторов согласно углам θ и ψ.
Таким образом, изобретение позволяет достичь наилучшей изохронности.
Согласно конкретному варианту осуществления изобретения, можно, к тому же, обеспечить идентичную частоту колебаний с углами отклонения θ и ψ.
В частности, период колебаний при двух поворотах, по существу, идентичен. То есть:

На фиг. 1 показано взаимодействие пальца 21 инерционного элемента 2 с прорезью 41 в одном колесе из комплекта 4 анкерных колес, которое обычно аналогично анкерному колесу механизма 200 непрерывного поддержания энергии. Безусловно, без указанного комплекта 4 анкерных колес палец 21 в свободном состоянии занимал бы равновесное положение на главной оси D. Согласно вышеприведенному уравнению, в установившемся состоянии системы обеспечивается круговая траектория указанного пальца 21 относительно оси поворота комплекта 4 анкерных колес.
Изобретение относится конкретно к часовому механизму 500 для механических часов 1000, в котором применяется принцип указанного гибкого универсального шарнира.
Указанный механизм 500 содержит размещенные на плате 1 резонатор 100 и спусковой механизм 200, подвергаемый крутящему моменту, создаваемому приводным средством 300 механизма 500.
Резонатор 100 содержит, по меньшей мере, один инерционный элемент 2, который приспособлен совершать колебания относительно платы 1. Указанный инерционный элемент 2 подвергается действию упругого возвратного устройства 3, 31, 32, которое прямо или косвенно закреплено на плате 1. Указанный инерционный элемент 2 приспособлен поворачиваться вокруг главной оси D и взаимодействовать с комплектом 4 анкерных колес спускового механизма 200.
Согласно изобретению, колесо из комплекта 4 анкерных колес содержит приводное средство 40, которое приспособлено взаимодействовать при непрерывной передаче движения с дополнительным непрерывным приводным средством 20 инерционного элемента 2 в каждом угловом положении инерционного элемента.
Упругое возвратное устройство 3, 31, 32 приспособлено возвращать дополнительное непрерывное приводное средство 20 к главной оси D.
Указанное упругое возвратное устройство 3, 31, 32 содержит первый упругий возвратный элемент 31, размещенный вблизи первой оси D1 и приспособленный возвращать дополнительное непрерывное приводное средство 20 к главной оси D, а также содержит второй упругий возвратный элемент 32, размещенный вблизи второй оси D2 и приспособленный возвращать дополнительное непрерывное приводное средство 20 к главной оси D.
Первая ось D1 и вторая ось D2 перпендикулярны друг другу и перпендикулярны главной оси D.
Упругое возвратное устройство 3, 31, 32 формирует направляющие средства карданного типа, предназначенные блокировать три степени свободы линейного перемещения и одну степень свободы поворота центра инерции G инерционного элемента 2, чтобы инерционный элемент 2 при повороте вокруг центральной точки, определяющей фиксированное положение центра инерции G относительно платы 1, имел только две степени свободы поворота, а именно, вокруг первой оси D1 и второй оси D2.
В частности, главная ось D, первая ось D1 и вторая ось D2 пересекаются в одной точке.
В предпочтительном варианте осуществления изобретения, проиллюстрированном чертежами, первый упругий возвратный элемент 31 и второй упругий возвратный элемент 32 расположены последовательно, к примеру, первый упругий возвратный элемент 31 размещен между платой 1 и промежуточной поперечиной 35, а второй упругий возвратный элемент 32 размещен между промежуточной поперечиной 35 и инерционным элементом 2, или наоборот.
В конкретном варианте осуществления изобретения первый упругий возвратный элемент 31, с одной стороны, и второй упругий возвратный элемент 32, с другой стороны, приспособлены, по меньшей мере, на части их поворотного перемещения создавать возвратный крутящий момент, пропорциональный углу их поворота. Следует отметить, что указанная пропорциональность соблюдается при всех угловых перемещениях. Если требуется, могут быть предусмотрены угловые ограничивающие средства, предназначенные ограничивать гибкость указанных упругих возвратных элементов диапазоном, в котором обеспечивается пропорциональность обратного крутящего момента углу их поворота.
Чтобы оптимизировать изохронность резонатора, инерционный элемент 2 в системе координат, образованной главной осью D, первой осью D1 и второй осью D2, должен иметь диагональную матрицу тензора инерции, члены которой равны, по меньшей мере, по двум осям из перечисленных: главной оси D, первой оси D1 и второй оси D2.
В связи с вышесказанным, при последовательном расположении первого упругого возвратного элемента 31 и второго упругого возвратного элемента 32 с размещением первого упругого возвратного элемента 31 между платой 1 и промежуточной поперечиной 35, а второго упругого возвратного элемента 32 между промежуточной поперечиной 35 и инерционным элементом 2, как показано на фиг. 1, 3, 6 и 12, инерционный элемент 2 в системе координат, образованной главной осью D, первой осью D1 и второй осью D2, будет иметь диагональную матрицу тензора инерции, члены которой равны по главной оси D и первой оси D1.
Согласно вариантам осуществления изобретения, представленным на фиг. 1 и 6, приводное средство 40 включает, по существу, радиальную прорезь 41 относительно главной оси D для взаимодействия с пальцем 21 дополнительного непрерывного передаточного средства 20. В этом случае механизм непрерывного поддержания энергии включает указанный палец 21, составляющий одно целое с инерционным элементом 2, который приводится во вращение колесом 4 с прорезью 41, взаимодействующим посредством косых зубцов с другим колесом 49 на конце зубчатой передачи и, таким образом, подвергается крутящему моменту, создаваемому приводным средством 300, в частности, по меньшей мере, одним барабаном. В данном случае колесо 4 вращается вокруг оси, перпендикулярной плоскости, определяемой осями двух «гибких» поворотов.
Предпочтительно, первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 сформированы поворотными гибкими направляющими средствами, не имеющими шарниров, как показано на чертежах.
При практической реализации изобретения первый упругий возвратный элемент 31 и второй упругий возвратный элемент 32 совместно образуют монолитный компонент.
В конкретном варианте осуществления изобретения, проиллюстрированном на чертежах, первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 содержат поворотные гибкие направляющие средства с двумя лентами, которые расположены на одном уровне и пересекаются, либо с двумя лентами, которые расположены на двух приблизительно параллельных уровнях таким образом, чтобы пересекались их проекции на плоскость, параллельную указанным уровням.
Согласно указанному варианту осуществления изобретения, точка реального или проецируемого пересечения двух лент так называемой гибкой опоры, предпочтительно, находится в диапазоне от 0,12 до 0,14 их длины, при этом угол между указанными лентами составляет от 60 до 80° (см. фиг. 4).
В другом варианте осуществления изобретения первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 содержат поворотные гибкие направляющие средства с шарнирами RCC, расположенными «голова к хвосту».
В следующем варианте осуществления изобретения предусмотрено удвоенное или еще большее количество первых упругих возвратных элементов 31 и/или вторых упругих возвратных элементов 32 для увеличения жесткости гибкого универсального шарнира в связи с необходимостью связывания некоторых степеней свободы.
В конкретном варианте осуществления изобретения первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 содержат поворотные гибкие направляющие средства с гибкими лентами, изготовленными из элинвара.
В следующем варианте осуществления изобретения первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 содержат поворотные гибкие направляющие средства с гибкими лентами, изготовленными из оксида кремния с целью компенсации температурных изменений.
В одном из вариантов осуществления изобретения первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 содержат поворотные гибкие направляющие средства с двумя лентами, расположенными на приблизительно параллельных уровнях, проекции которых на плоскость, параллельную указанным уровням, пересекаются, причем каждая из указанных лент принадлежит одному из монолитных блоков 38, который включает ленту и средства ее крепления, при этом в результате соединения двух указанных блоков 38 «спина к спине» формируется гибкая опора с двумя лентами (см. фиг. 5).
Согласно одному из вариантов осуществления изобретения, первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32 спроектированы таким образом, чтобы первый период T1 колебаний, первый момент I1 инерции и первая упругая характеристика k1 опоры при первом повороте вокруг первой оси D1 были равны, соответственно, второму периоду колебаний T2, второму моменту I2 инерции и второй упругой характеристике k2 опоры при втором повороте вокруг второй оси D2.
В частности, первый упругий возвратный элемент 31 и второй упругий возвратный элемент 32 имеют идентичные характеристики.
В конкретном варианте осуществления изобретения при равновесии системы плоскость, определяемая первой осью D1 и второй осью D2, перпендикулярна плоскости платы 1, а главная ось D параллельна плоскости платы 1, как показано на фиг. 6.
В другом варианте осуществления изобретения при равновесии системы, плоскость, определяемая первой осью D1 и второй осью D2, параллельна плоскости платы 1, а главная ось D перпендикулярна плоскости платы 1, как показано на фиг. 11.
В варианте осуществления изобретения, представленном на фиг. 11, приводное средство 40 имеет отверстие 42, предназначенное для ролика 45. Указанный ролик 45 установлен с возможностью качения по круговой направляющей 250, предусмотренной в инерционном элементе 2, причем указанная направляющая 250 формирует дополнительное непрерывное приводное средство 20. Ролик 45 прикладывает к инерционному элементу внеосевую силу и крутящий момент, при этом совместно с гибким универсальным шарниром 3 придает инерционному элементу 2 прецессионное движение, подобное движению монеты или тарелки при вращении на плоской поверхности за счет крутящего момента, либо подобное движению гироскопа или волчка. Таким образом, механизм непрерывного поддержания энергии сформирован кольцом, несущим круговую направляющую 250 и составляющим одно целое с инерционным элементом 2, приводимым в прецессионное движение колесом 4 с роликом 45, подвергаемым крутящему моменту, создаваемому приводным средством 300, в частности, по меньшей мере, одним барабаном, причем колесо 4 вращается вокруг оси, перпендикулярной плоскости, определяемой осями двух «гибких» поворотов.
Следует отметить, что в данном случае резонатор согласно изобретению представляет собой гироскоп с тремя кольцами, в котором промежуточное кольцо, подобно описанной выше поперечине, соединено балансировочной пружиной с каждым из колец, а именно, с внутренним кольцом и внешним кольцом.
В конкретном варианте осуществления изобретения первый упругий возвратный элемент 31 и/или второй упругий возвратный элемент 32, включающие поворотные гибкие направляющие средства с пересекающимися лентами, посредством механических ограничителей защищены от разрушения при ударном воздействии.
В конкретном варианте осуществления изобретения инерционный элемент 2 содержит инерционные блоки, предназначенные регулировать инерцию во избежание дисбаланса.
Изобретение также относится к часам, в частности, к механическим часам 1000, содержащим один указанный механизм 500.
Безусловно, настоящее изобретение обеспечивает явные преимущества:
- достижение изохронности резонатора, независимо от траектории инерционного элемента;
- повышение добротности резонатора за счет использования поворотных гибких направляющих средств, взамен шарниров трения;
- повышение эффективности спускового механизма за счет устранения прерывистого движения спускового механизма путем непрерывного поддержания энергии.
Использование: изобретение относится к часовому механизму для механических часов. Сущность: механизм (500), содержащий спусковой механизм (200) и резонатор (100), включающий инерционный элемент (2), подвергаемый действию гибкого универсального шарнира (3) и взаимодействующий с одним колесом из комплекта (4) анкерных колес, вращающихся вокруг главной оси (D), которое содержит приводное средство (40), взаимодействующее при непрерывной передаче движения с дополнительным приводным средством (20) инерционного элемента (2) при каждом угловом положении инерционного элемента, причем гибкий универсальный шарнир (3) способствует возврату указанного дополнительного средства (20) к главной оси (D) и содержит вблизи осей, ортогональных главной оси (D), упругие возвратные элементы (31, 32), ограничивающие двумя степенями свободы поворота подвижность инерционного элемента (2) вокруг фиксированного положения центра инерции (G) инерционного элемента (2) относительно платы (1). Технический результат: усовершенствование часового механизма путем обеспечения между изохронным резонатором и спусковым механизмом часового механизма взаимосвязи, исключающей трение, присущее обычным шарнирам, а также исключающей прерывистое движение, присущее традиционному спусковому механизму, что позволяет повысить добротность и эффективность резонатора. 2 н. и 22 з.п. ф-лы, 13 ил.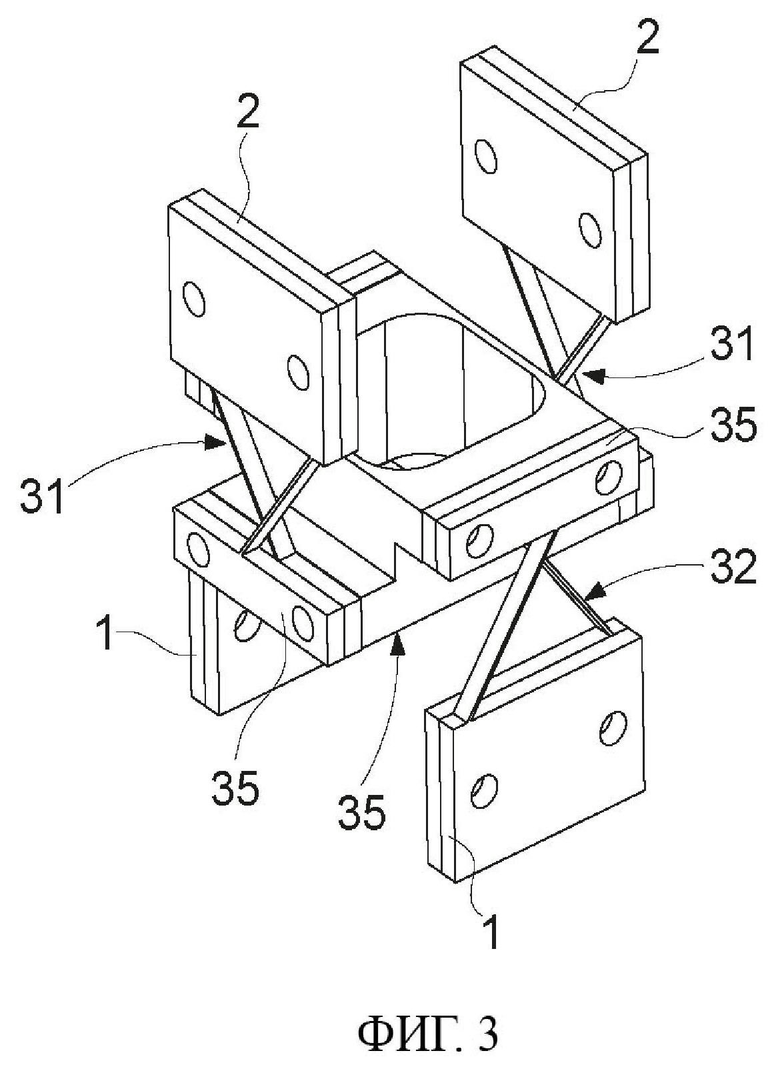
1. Часовой механизм (500) для механических часов (1000), содержащий размещенные на плате (1) резонатор (100) и спусковой механизм (200), подвергаемый крутящему моменту, создаваемому приводным средством (300), предусмотренным в указанном механизме (500), причем указанный резонатор (100) содержит инерционный элемент (2), приспособленный совершать колебания относительно указанной платы (1), при этом указанный инерционный элемент (2) подвергается действию упругого возвратного устройства (3; 31 32), прямо или косвенно закрепленного на указанной плате (1), причем указанный инерционный элемент (2) приспособлен поворачиваться вокруг главной оси (D) и взаимодействовать с одним колесом из комплекта (4) анкерных колес, предусмотренного в указанном спусковом механизме (200), отличающийся тем, что указанное колесо из комплекта (4) анкерных колес включает приводное средство (40), приспособленное взаимодействовать с предусмотренным в инерционном элементе (2) дополнительным непрерывным приводным средством (20) для непрерывной передачи движения при каждом угловом положении инерционного элемента, и отличающийся тем, что указанное упругое возвратное устройство (3, 31, 32) приспособлено возвращать указанное дополнительное непрерывное приводное средство (20) к главной оси (D), а также отличающийся тем, что указанное упругое возвратное устройство (3; 31; 32) содержит первый упругий возвратный элемент (31), размещенный вблизи первой оси (D1) и приспособленный возвращать указанное дополнительное непрерывное приводное средство (20) к главной оси (D), и второй упругий возвратный элемент (32), размещенный вблизи второй оси (D2) и приспособленный возвращать указанное дополнительное непрерывное приводное средство (20) к главной оси (D), причем первая ось (D1) и вторая ось (D2) перпендикулярны друг другу и указанной главной оси (D), к тому же, отличающийся тем, что указанное упругое возвратное устройство (3, 31, 32) формирует направляющие средства карданного типа для блокировки трех степеней свободы линейного перемещения и одной степени свободы поворота центра инерции (G) инерционного элемента (2), чтобы инерционный элемент (2), поворачивающийся вокруг центральной точки, определяющей фиксированное положение центра инерции (G) относительно платы (1), имел только две степени свободы вращения, а именно, вокруг первой оси (D1) и второй оси (D2).
2. Механизм (500) по п. 1, отличающийся тем, что указанная главная ось (D), указанная первая ось (D1) и указанная вторая ось (D2) являются параллельными.
3. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и указанный второй упругий возвратный элемент (32) расположены последовательно, при этом первый упругий возвратный элемент (31) размещен между указанной платой (1) и промежуточной поперечиной (35), а второй упругий возвратный элемент (32) размещен между промежуточной поперечиной (35) и инерционным элементом (2), или наоборот.
4. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31), с одной стороны, и указанный второй упругий возвратный элемент (32), с другой стороны, приспособлены создавать возвратный крутящий момент, пропорциональный углу их поворота.
5. Механизм (500) по п. 1, отличающийся тем, что указанный инерционный элемент (2) в системе координат, образованной указанной главной осью (D), указанной первой осью (D1) и указанной второй осью (D2), имеет диагональную матрицу тензора инерции, члены которой равны, по меньшей мере, по двум осям из перечисленных: указанной главной оси (D), указанной первой оси (D1) и указанной второй оси (D2).
6. Механизм (500) по п. 2, отличающийся тем, что указанный инерционный элемент (2) в системе координат, образованной указанной главной осью (D), указанной первой осью (D1) и указанной второй осью (D2), имеет диагональную матрицу тензора инерции, члены которой равны, по меньшей мере, по двум осям из перечисленных: указанной главной оси (D), указанной первой оси (D1) и указанной второй оси (D2), а также отличающийся тем, что указанный инерционный элемент (2) в системе координат, образованной указанной главной осью (D), указанной первой осью (D1) и указанной второй осью (D2), имеет диагональную матрицу тензора инерции, члены которой равны по указанный главной оси (D) и указанной первой оси (D1).
7. Механизм (500) по п. 1, отличающийся тем, что указанное приводное средство (40) содержит, по существу, радиальную прорезь (41) относительно указанной главной оси (D) для взаимодействия с пальцем (21) указанного дополнительного непрерывного приводного средства (20).
8. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) сформированы поворотными гибкими направляющими средствами, не имеющими шарниров.
9. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) совместно образуют монолитный компонент.
10. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) содержат поворотные гибкие направляющие средства с двумя лентами, которые расположены на одном уровне и пересекаются, либо с двумя лентами, которые расположены на двух приблизительно параллельных уровнях таким образом, чтобы пересекались их проекции на плоскость, параллельную указанным уровням.
11. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) содержат поворотные гибкие направляющие средства с шарнирами RCC, расположенными «голова к хвосту».
12. Механизм (500) по п. 1, отличающийся тем, что содержит удвоенное или еще большее количество указанных первых упругих возвратных элементов (31) и/или указанных вторых упругих возвратных элементов (32) для увеличения жесткости гибкого универсального шарнира в связи с необходимостью связывания некоторых степеней свободы.
13. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) содержат поворотные гибкие направляющие средства с гибкими лентами, изготовленными из элинвара.
14. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) содержат поворотные гибкие направляющие средства с гибкими лентами, изготовленными из оксида кремния с целью компенсации температурных изменений.
15. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) содержат поворотные гибкие направляющие средства с двумя лентами, расположенными на приблизительно параллельных уровнях, проекции которых на плоскость, параллельную указанным уровням, пересекаются, причем каждая из указанных лент принадлежит одному из монолитных блоков (38), который включает ленту и средства ее крепления, при этом в результате соединения двух указанных блоков (38) «спина к спине» формируется гибкая опора с двумя лентами.
16. Механизм (500) по п. 15, отличающийся тем, что реальная или проецируемая точка пересечения двух лент указанной поворотной гибкой опоры с двумя лентами находится в диапазоне от 0,12 до 0,14 длины указанных лент, при этом угол между указанными лентами составляет от 60 до 80°.
17. Механизм (500) по п. 15, отличающийся тем, что первый период колебаний (T1), первый момент (I1) инерции и первая упругая характеристика (k1) опоры при первом повороте вокруг первой оси (D1) равны, соответственно, второму периоду колебаний (T2), второму моменту (I2) инерции и второй упругой характеристике (k2) опоры при втором повороте вокруг второй оси (D2).
18. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32) имеют идентичные характеристики.
19. Механизм (500) по п. 1, отличающийся тем, что при равновесии системы плоскость, определяемая указанной первой осью (D1) и указанной второй осью (D2), перпендикулярна плоскости указанной платы (1), а также отличающийся тем, что указанная главная ось (D) параллельна плоскости указанной платы (1).
20. Механизм (500) по п. 1, отличающийся тем, что при равновесии системы плоскость, определяемая указанной первой осью (D1) и указанной второй осью (D2), параллельна плоскости указанной платы (1), а также отличающийся тем, что указанная главная ось (D) перпендикулярна плоскости указанной платы (1).
21. Механизм (500) по п. 1, отличающийся тем, что приводное средство (40) имеет отверстие (42), предназначенное для ролика (45), установленного с возможностью качения по предусмотренной в инерционном элементе (2) круговой направляющей (250), которая формирует дополнительное непрерывное приводное средство (20).
22. Механизм (500) по п. 1, отличающийся тем, что указанный первый упругий возвратный элемент (31) и/или указанный второй упругий возвратный элемент (32), включающие поворотные гибкие направляющие средства с пересекающимися лентами, защищены посредством механических ограничителей от разрушения при ударном воздействии.
23. Механизм (500) по п. 1, отличающийся тем, что инерционный элемент (2) включает инерционные блоки, предназначенные регулировать инерцию во избежание дисбаланса.
24. Механические часы (1000), содержащие механизм (500) по п. 1.
| EP 3054358 B1, 28.08.2019 | |||
| EP 3035127 A1, 22.06.2016 | |||
| CH 710160 A2, 31.03.2016 | |||
| RU 2014143453 A, 20.05.2016 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВИТАМИНОАМИНОКИСЛОТНОГО КОНЦЕНТРАТА | 1996 |
|
RU2105806C1 |
| ЭЛЕКТРОЛИТ ДЛЯ ЭЛЕКТРОХИМИЧЕСКОЙ РАЗМЕРНОЙ ОБРАБОТКИ | 2002 |
|
RU2221677C2 |
| EP 1967919 B1, 03.06.2009. | |||

