Изобретение относится к направлению техники неразрушающего контроля, получившему название «системы контроля состояния конструкций» (в англоязычной литературе - system health monitoring или SHM). Способ обнаружения и локализации повреждений в тонкостенных конструкциях основан на возбуждении с помощью нескольких пьезоэлектрических преобразователей (ПП) импульсов ультразвуковых волн Лэмба, их приеме также с помощью нескольких ПП и анализе принятых сигналов, с помощью которого определяется положение и характер повреждения. ПП монтируются на съемной раме, которая устанавливается на неповрежденной конструкции для регистрации опорного акустического поля. Такие измерения производятся несколько раз путем монтажа-демонтажа датчиков для накопления статистических данных, необходимых для выбора порога обнаружения повреждения. После завершения цикла эксплуатации конструкции, во время которого может произойти ее повреждение, рама с ПП снова устанавливается на конструкцию и регистрируется новое (возмущенное) акустическое поле. Для выделения информации о повреждении используется сравнение возмущенного волнового поля с опорным и последующая обработка с помощью алгоритма, основанного на физических закономерностях взаимодействия двумерных волн Лэмба с неоднородностями (повреждениями). Предлагаемый способ включает в себя также оценку размера повреждения.
По многочисленным научным публикациям и патентам известны SHM системы, которые состоят из сети обратимых ПП. Эти ПП могут быть съемными, наклеенными на тонкостенную конструкцию (пластину) или встроенными в нее (если она выполнена из композитного материала). Излучающие ПП формируют в конструкции импульсы волн Лэмба (ВЛ), которые принимаются другими ПП. Таким путем формируется множество трасс распространения ВЛ. Некоторые из них могут пересекаться. С помощью цифровой компьютеризованной системы сбора данных регистрируется совокупность сигналов, соответствующих заведомо неповрежденному состоянию конструкции. Это распределение сигналов называется «опорным» (base line). Появившееся повреждение (дефект) изменяет регистрируемые сигналы. Сравнивая текущее распределение с опорным, определяют положение и характер (размер) повреждения. Упомянутые выше системы отличаются схемами размещения ПП, способом формирования трасс распространения зондирующих импульсов (посредством коммутации пар излучатель-приемник) и, самое главное, алгоритмами обработки информации.
Например, в патенте CN 110389176 А (Fatigue damage diagnosis method for carbon fiber reinforced matrix composite structure) данные предварительно обрабатываются с помощью непрерывного частотно-временного вейвлет преобразования. Затем вычисляется некий «индекс повреждения» и с помощью нейронной сети, которую обучают на примерах искусственно введенных повреждений, определяются положение и характеристики усталостного повреждения.
В патентах CN 106404911 A (Real time delay single-mode Lamb wave phased array system for plate structure detection) и US 20110058453 A1 (Lamb wave dispersion compensation for EUSR approach to ultrasonic beam steering) для определения положения повреждения предлагается использовать фазированную антенную решетку, которая работает и на излучение и на прием. Иными словами, используется известный подход, характерный для радио- и акустической локации. Благодаря электронному сканированию луча и импульсному излучению становится возможным определение положения дефекта на достаточно большой площади. При этом не требуется перемещать ПП по конструкции.
В патенте CN 103792287 A (Large-area structural damage detection method based on Lamb wave) напротив, используется одиночный приемно-излучающий ПП, который переставляется по конструкции. С помощью сканирования по частоте определяется частота отсечки антисимметричной моды ВЛ А1, затем излучаются сигналы на более низкой частоте, где существует только мода А0, и производится сканирование всей конструкции с целью определения положения и характера дефекта.
Наиболее близкими с точки зрения расположения датчиков и алгоритмов обработки являются технические решения, описанные в патенте US 7458266 B2 (Method and apparatus for detecting a load change upon a structure and analyzing characteristics of resulting damage). Они взяты за прототип. В данном патенте рассматривается регулярная сетка ПП, которые могут работать только на прием (пассивный режим), или на передачу и прием (активный режим). В активном режиме положение повреждения определяется «просветным» методом (на проход) и/или методом отражений. Недостатком алгоритма, который используется в просветном методе, является необходимость использования для определения положения дефекта многих точек пересечения путей распространения импульсов ВЛ. При этом для достижения хорошей точности нужно устанавливать большое число датчиков и использовать сложную коммутацию, что увеличивает объем аппаратуры и усложняет обработку.
Метод отражения хорошо работает в металлах, где ВЛ, в отличие от композитных материалов, не испытывают сильного поглощения. Поэтому в конструкциях из композитных материалах он практически неприменим.
По сравнению с прототипом предлагаемый метод имеет следующие преимущества:
- может использоваться как в металлах, так и в композитных материалах;
- работоспособен при небольшом числе ПП;
- упрощает аппаратуру и алгоритм обработки.
Задачей изобретения является создание способа обнаружения и локализации дефекта, который (способ) может использоваться как в металлах, так и в композитных материалах, при этом он работоспособен при небольшом числе ПП и упрощает аппаратуру и алгоритм обработки.
Поставленная задача решается тем, что в способе обнаружения и локализации повреждений в тонкостенных конструкциях на неповрежденную конструкцию с помощью фиксирующего устройства монтируют раму с 8-ю пьезоэлектрическими преобразователями (ПП), установленными в вершинах квадрата и в серединах его сторон;
с помощью 4-х обратимых ПП, расположенных в серединах сторон квадрата, в конструкции поочередно производят возбуждение цугов волн Лэмба;
с помощью указанных обратимых ПП, а также указанных ПП в вершинах квадрата, поочередно принимают прошедшие через конструкцию сигналы, эти сигналы регистрируют и запоминают с помощью цифровой компьютеризованной системы;
затем раму с ПП демонтируют;
монтаж и демонтаж рамы с ПП и запись сигналов повторяют несколько раз и по разностным сигналам производят формирование гистограмм параметра дискриминации, необходимых для выбора порога обнаружения дефекта;
дополнительно с помощью имитаторов разных диаметров по необходимости производят накопление гистограмм для определения размера дефекта;
в дальнейшем, для обнаружения дефектов, полученных указанной тонкостенной конструкцией при ее эксплуатации, раму с ПП устанавливают в то же положение, вышеуказанные операции излучения-приема указанных сигналов повторяют и возмущенные сигналы запоминают;
производят вычитание возмущенных и опорных сигналов и для разностных сигналов во временных окнах, параметры которых предварительно определяют по групповой скорости моды нулевой моды волн Лэмба, рассчитывают средние амплитуды;
амплитуды разностных сигналов нормируют на амплитуды опорных, рассчитанные в тех же временных окнах;
параметр дискриминации сравнивают с порогом и при превышении принимают решение об обнаружении дефекта;
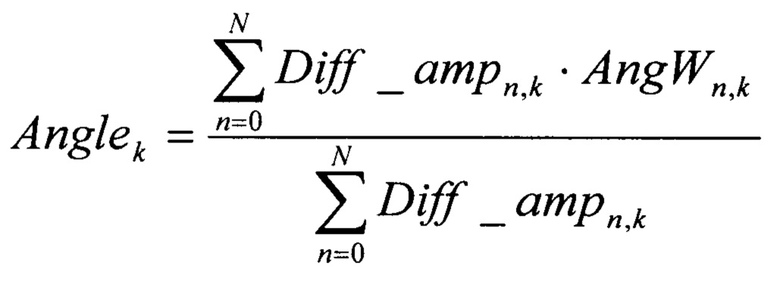
рассчитывают 4 направления на дефект по формуле
где Anglek - расчетное значение углового положения дефекта, определенное при зондировании с помощью k-ого ПП, Diff_ampn,k - нормированная амплитуда разностного сигнала на датчике n при его облучении k-ым ПП, AngWn,k - весовая функция (угловые координаты приемников n относительно k-ого ПП);
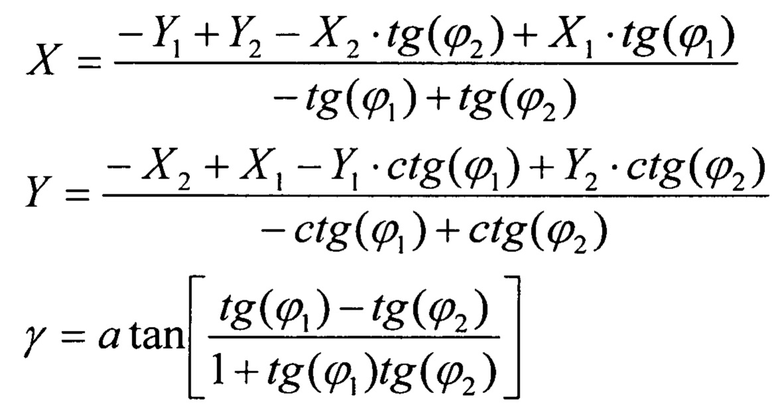
рассчитывают координаты 6-и точек пересечения направлений на дефект по формулам


где X, Y - координаты точки пересечения направлений 1 и 2; X1, Y1 - координаты 1-ого излучателя; X2,Y2 - координаты 2-ого излучателя, ϕ1 и ϕ2 - оценки углов, отсчитываемых от оси ОХ; γ - угол между направлениями;
положение дефекта определяют усреднением координат точек пересечения направлений, при этом перед усреднением исключают точки, лежащие вне квадрата, а также полученные по пересечению почти параллельных направлений.
В частном случае при необходимости контроля большой поверхности на ней располагают сетку из квадратных ячеек, состоящих из ПП, при этом излучающие ПП выполняют всенаправленными и их зондирующие сигналы используют в нескольких соседних ячейках.
В основу предлагаемого способа обнаружения и локализации дефекта положены общие закономерности взаимодействия волн с неоднородностями среды, в которой они распространяются. Если на пути плоской двумерной волны с длиной λ встречается препятствие с поперечником D, за ним на расстоянии R, удовлетворяющим неравенству R<D2/λ, формируется область частичной тени. При увеличении расстояния из-за дифракции эта область расширяется и в так называемой «волновой зоне» при R>D2/λ возникает расходящаяся цилиндрическая волна с определенной угловой зависимостью амплитуды поля. В середине углового сектора за дефектом (по направлению излучающий ПП - дефект) ослабление максимально, а к краям эффект уменьшается. Угловую ширину этого сектора можно оценить соотношением θ≈λ/D, которое применимо, если λ/D существенно меньше 1.
При этом поле за дефектом можно представить в виде суммы опорного поля (поля в пластине без дефекта) и рассеянного на дефекте поля. Поэтому вычитая из поля, искаженного неоднородностью, опорное поле, можно получить диаграмму рассеяния. Когда поперечник неоднородности существенно больше длины волны, диаграмма рассеяния вытянута в направлении распространения волны от излучающего ПП к дефекту. Поэтому рассеянный сигнал (напомним, он получается вычитанием возмущенного и опорного полей) в этом направлении существенно больше сигнала, рассеянного назад. Отсюда следует, что локация «на просвет» энергетически выгоднее локации с использованием сигнала обратного рассеяния. Для реализации «просветной» схемы зондирования приемники должны располагаться в пределах некоторого сектора за неоднородностью. Регистрируя возмущения углового распределения амплитуды разностного поля с помощью нескольких приемников можно, во-первых, установить факт появления неоднородности, во-вторых - оценить направление на нее. Направление на неоднородность в данном случае может быть определено путем расчет «центра тяжести» углового распределения разностного поля по формуле (1)
где Anglek - расчетное значение углового положения дефекта, определенное при зондировании с помощью k-го ПП, Diff_ampn,k - нормированная амплитуда разностного сигнала на датчике n при его облучении ПП с номером k, AngWn,k - весовая функция (угловые координаты приемников n относительно ПП k).
В случае применения для «просветного» зондирования неоднородностей волн Лэмба картина усложняется из-за их модовой структуры. Известно, что моды этих волн делятся на две группы: симметричные и антисимметричные. Нулевая (низшая) антисимметричная мода представляет собой изгибную волну, в которой все слои пластины движутся в фазе, а в нулевой симметричной («перистальтической») моде движение симметрично относительно средней линии пластины. Фазовая и групповая скорости симметричной моды выше, чем антисимметричной. Поэтому возбужденный в пластине волновой импульс при распространении распадается на несколько сигналов, которые достигают приемника в разные моменты времени. Авторами экспериментально установлено, что быстрая симметричная мода почти не «чувствует» такие неоднородности, как отверстие, расслоение, массовая нагрузка поверхности. Зато медленная антисимметричная мода ими заметно ослабляется. Поэтому при вычитании опорного и возмущенного сигналов в большинстве случаев уверенно выделяется первый приход медленной нулевой моды. Это позволяет выбрать временные окна, в которых должен производиться дальнейший анализ разностных сигналов. В этих окнах вычисляются средние амплитуды сигналов, которые затем используются для расчета направления по формуле (1). Чтобы исключить влияние на оценку направления разницы в расстояниях между излучателями и приемниками, эти амплитуды нормируются на амплитуды прямых опорных сигналов.
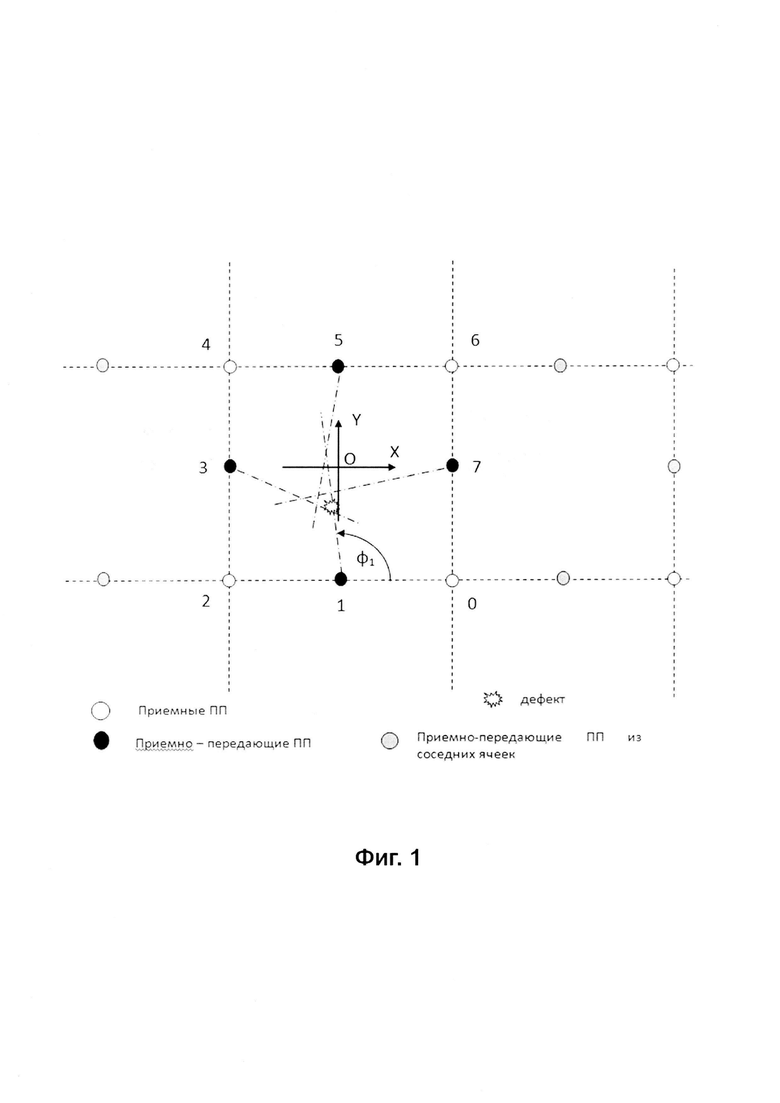
Фиг. 1 иллюстрирует описанный способ на примере расположения ПП на исследуемой конструкции в узлах регулярной сетки из квадратов. Рассмотрим работу системы в пределах одной ячейки, когда для излучения используются нечетные ПП, располагающиеся в серединах сторон квадрата. Для расчета направления по отношению к каждому из них должны использоваться 7 приемных ПП, располагающихся в секторе 180°. Шаг между лучами, соединяющими излучатель и приемники, составляет в среднем 30°. Это позволяет достаточно детально зафиксировать угловое распределение разностного (рассеянного) поля, что необходимо для надежного вычисления направления.
4 излучателя должны включаться поочередно и излучать импульсные сигналы, состоящие из нескольких перидов несущей частоты. ПП, не участвующие в излучении, при этом работают на прием. Для расчета по данным 4-х циклов зондирования с помощью формулы (1) 4-х направлений номера излучающих преобразователей должны быть k=0…3, а приемных - n=0…7.
В результате этих расчетов получаются 4 направления на дефект, которые имеют 6 точек пересечения. Координаты (X, Y) каждой из этих точек в системе координат XOY на фиг. 1 можно найти по формулам (2)
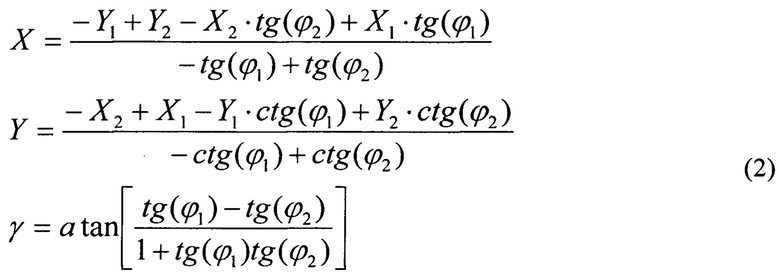
Здесь: X, Y - координаты точки пересечения направлений 1 и 2; X1, Y1 - координаты 1-ого излучателя; X2, Y2 - координаты 2-ого излучателя, ϕ1 и ϕ2 - оценки углов, отсчитываемых от оси Ох; γ - угол между направлениями.
В общем случае координаты точек пересечения не совпадают. Очевидно, что для уточнения результатов они должны каким-либо способом усредняться. Перед усреднением должны быть удалены точки пересечения, находящиеся за пределами шестиугольника, а также полученные по пересечению почти параллельных направлений. Для этого может использоваться оценка угла γ. Как показывает опыт, наименьшую погрешность измерения дает медианное усреднение. Полученные в опытах с композитными пластинами погрешности составляют примерно 10% от стороны квадрата, в вершинах которого расположены ПП.
Приемно-излучающие ПП должны выполняться всенаправленными, это дает возможность использовать излучение одного ПП еще в одной соседней ячейке.
Все вышеизложенное относится к идеализированной ситуации, когда система пьезоэлектрических преобразователей может быть закреплена на конструкции стационарно. Если речь идет о диагностике, например, небольших летательных аппаратов (ЛА), такое размещение невозможно. Поэтому в данном способе предлагается установить ПП на жесткой раме, которую с помощью фиксирующего устройства можно устанавливать и снимать с ЛА. Перед началом цикла эксплуатации рама должна устанавливаться на место. После этого должна проводиться съемка опорного (невозмущенного) акустического поля, которое должно регистрироваться и храниться в системе сбора и обработки данных для последующего сравнения с данными измерений, полученными по истечении времени эксплуатации ЛА, когда могло произойти его повреждение. Как показывает опыт, записи опорного поля, полученные при многократном монтаже и демонтаже рамы с ПП на исследуемой конструкции, даже не подвергавшейся никаким силовым воздействиям, несколько отличаются. Эти отличия обусловлены различными внешними факторами, важнейшими из которых являются акустический контакт ПП с поверхностью и температура. Данное обстоятельство делает необходимым выработать критерий оценки отличий опорного и возмущенного полей. Для этой цели путем сравнения записей опорного поля при многократном монтаже - демонтаже ПП должна быть построена гистограмма некоторого параметра дискриминации, вычисляемого по их разнице. По этой гистограмме выбирается порог обнаружения, при превышении которого принимается решение о наличии дефекта. Аналогичный подход может быть использован и для оценки размера повреждения.
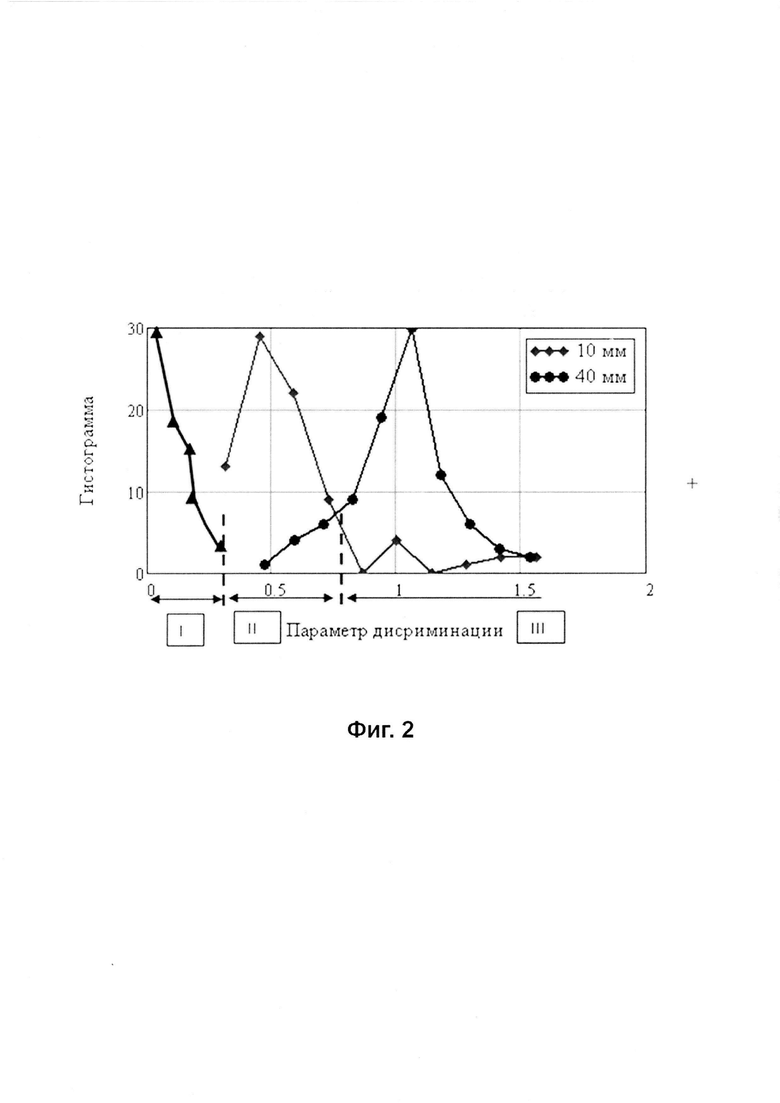
Описанная процедура иллюстрируется на фиг. 2, на которой представленные гистограммы получены с помощью массовой нагрузки поверхности в виде металлических цилиндров двух диаметров. При превышении параметром дискриминации (в данном случае это максимум из всех максимумов нормированных разностей по 4-м измерениям направлений) значения 0.4 считается, что дефект обнаружен и имеет диаметр не менее 10 мм. Если этот параметр больше 0.65, диаметр не меньше 40 мм. Подобные гистограммы должны строиться для каждой конкретной конструкции. При этом использование имитатора необходимо, т.к. в противном случае пришлось бы каждый раз «ломать» конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ПРЕОБРАЗОВАТЕЛЕМ И ИСТОЧНИКОМ АКУСТИЧЕСКОЙ ЭМИССИИ | 2007 |
|
RU2397490C2 |
| Способ акустического контроля трубопровода | 2021 |
|
RU2758195C1 |
| СПОСОБ АКУСТИЧЕСКОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2825120C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ | 2010 |
|
RU2437066C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 2010 |
|
RU2439551C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2000 |
|
RU2156455C1 |
| СЕЛЕКТИВНЫЙ АКУСТИКО-ЭМИССИОННЫЙ ПЬЕЗОПРЕОБРАЗОВАТЕЛЬ УПРУГИХ ВОЛН | 2011 |
|
RU2493672C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА АКУСТИЧЕСКОЙ ЭМИССИИ | 2011 |
|
RU2498293C2 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2008 |
|
RU2383869C2 |
Использование: для обнаружения и локализации повреждений в тонкостенных конструкциях. Сущность изобретения заключается в том, что на неповрежденную конструкцию с помощью фиксирующего устройства монтируют раму с 8-ю пьезоэлектрическими преобразователями (ПП), установленными в вершинах квадрата и в серединах его сторон; с помощью 4-х обратимых ПП, расположенных в серединах сторон квадрата, в конструкции поочередно производят возбуждение цугов волн Лэмба; с помощью указанных обратимых ПП, а также указанных ПП в вершинах квадрата, поочередно принимают прошедшие через конструкцию сигналы, эти сигналы регистрируют и запоминают с помощью цифровой компьютеризованной системы; затем раму с ПП демонтируют; монтаж и демонтаж рамы с ПП и запись сигналов повторяют несколько раз и по разностным сигналам производят формирование гистограмм параметра дискриминации, необходимых для выбора порога обнаружения дефекта. Технический результат: обеспечение возможности обнаружения и локализации дефекта, как в металлах, так и в композитных материалах, при небольшом числе ПП, а также достаточно простой аппаратуре и алгоритме обработки. 1 з.п. ф-лы, 2 ил.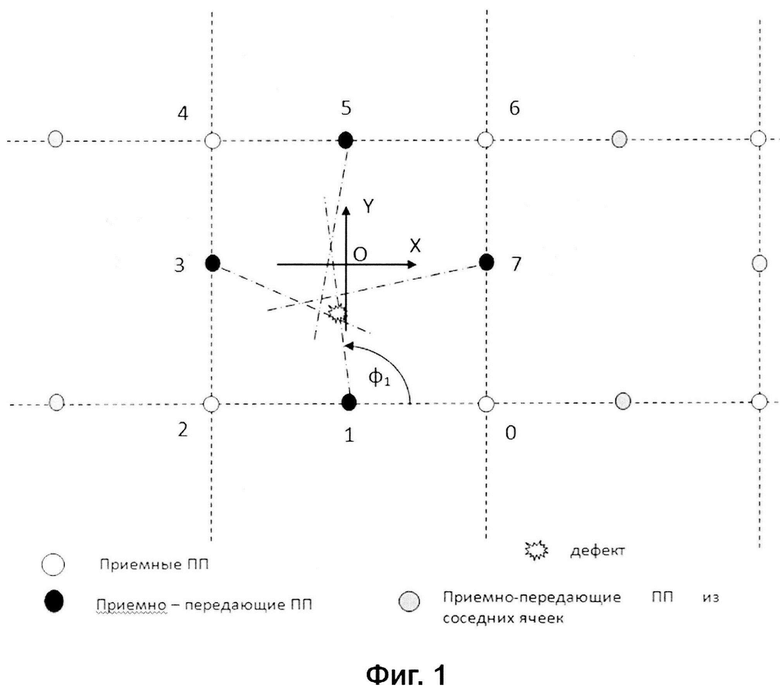
1. Способ обнаружения и локализации повреждений в тонкостенных конструкциях, характеризующийся тем, что на неповрежденную конструкцию с помощью фиксирующего устройства монтируют раму с 8-ю пьезоэлектрическими преобразователями (ПП), установленными в вершинах квадрата и в серединах его сторон;
с помощью 4-х обратимых ПП, расположенных в серединах сторон квадрата, в конструкции поочередно производят возбуждение цугов волн Лэмба;
с помощью указанных обратимых ПП, а также указанных ПП в вершинах квадрата, поочередно принимают прошедшие через конструкцию сигналы, эти сигналы регистрируют и запоминают с помощью цифровой компьютеризованной системы;
затем раму с ПП демонтируют;
монтаж и демонтаж рамы с ПП и запись сигналов повторяют несколько раз и по разностным сигналам производят формирование гистограмм параметра дискриминации, необходимых для выбора порога обнаружения дефекта;
дополнительно с помощью имитаторов разных диаметров по необходимости производят накопление гистограмм для определения размера дефекта;
в дальнейшем, для обнаружения дефектов, полученных указанной тонкостенной конструкцией при ее эксплуатации, раму с ПП устанавливают в то же положение, вышеуказанные операции излучения-приема указанных сигналов повторяют и возмущенные сигналы запоминают;
производят вычитание возмущенных и опорных сигналов и для разностных сигналов во временных окнах, параметры которых предварительно определяют по групповой скорости моды нулевой моды волн Лэмба, рассчитывают средние амплитуды;
амплитуды разностных сигналов нормируют на амплитуды опорных, рассчитанные в тех же временных окнах;
параметр дискриминации сравнивают с порогом и при превышении принимают решение об обнаружении дефекта;
рассчитывают 4 направления на дефект по формуле
где Anglek - расчетное значение углового положения дефекта, определенное при зондировании с помощью k-го ПП, Diff_ampn,k - нормированная амплитуда разностного сигнала на датчике n при его облучении k-м ПП, AngWn,k - весовая функция (угловые координаты приемников n относительно k-го ПП);
рассчитывают координаты 6-ти точек пересечения направлений на дефект по формулам
где X, Y - координаты точки пересечения направлений 1 и 2; X1, Y1 - координаты 1-го излучателя; X2, Y2 - координаты 2-го излучателя, ϕ1 и ϕ2 - оценки углов, отсчитываемых от оси ОХ; γ - угол между направлениями;
положение дефекта определяют усреднением координат точек пересечения направлений, при этом перед усреднением исключают точки, лежащие вне квадрата, а также полученные по пересечению почти параллельных направлений.
2. Способ по п. 1, отличающийся тем, что при необходимости контроля большой поверхности на ней располагают сетку из квадратных ячеек, состоящих из ПП, при этом излучающие ПП выполняют всенаправленными и их зондирующие сигналы используют в нескольких соседних ячейках.
| US 2006079747 A1, 13.04.2006 | |||
| Виброакустический способ оценки технического состояния проводящих инженерных коммуникаций | 2020 |
|
RU2734724C1 |
| Автоматический пресс | 1950 |
|
SU93540A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ МИКРОДЕФЕКТОВ В ЛИСТОВОМ СТЕКЛЕ | 2009 |
|
RU2390770C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЛОКАЛЬНОЙ (МЕСТНОЙ) КОРРОЗИИ И СЛЕЖЕНИЯ ЗА ЕЕ РАЗВИТИЕМ | 2007 |
|
RU2379675C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ИЗНАШИВАЕМОГО СЛОЯ ОГНЕУПОРНОЙ ФУТЕРОВКИ В РАЗЛИВОЧНЫХ КОВШАХ И РАЗЛИВОЧНЫХ ФОРМАХ, А ТАКЖЕ ИЗГОТОВЛЕННЫЙ В СООТВЕТСТВИИ С НИМ ИЗНАШИВАЕМЫЙ СЛОЙ ФУТЕРОВКИ | 2005 |
|
RU2383412C2 |

