Предлагаемое изобретение относится к области гидроакустической связи и может использоваться в гидроакустических информационно-управляющих сетях [1] на участках гидрорелейных линий для передачи коротких формулярных сообщений с объемами от нескольких десятков до нескольких сотен информационных символов.
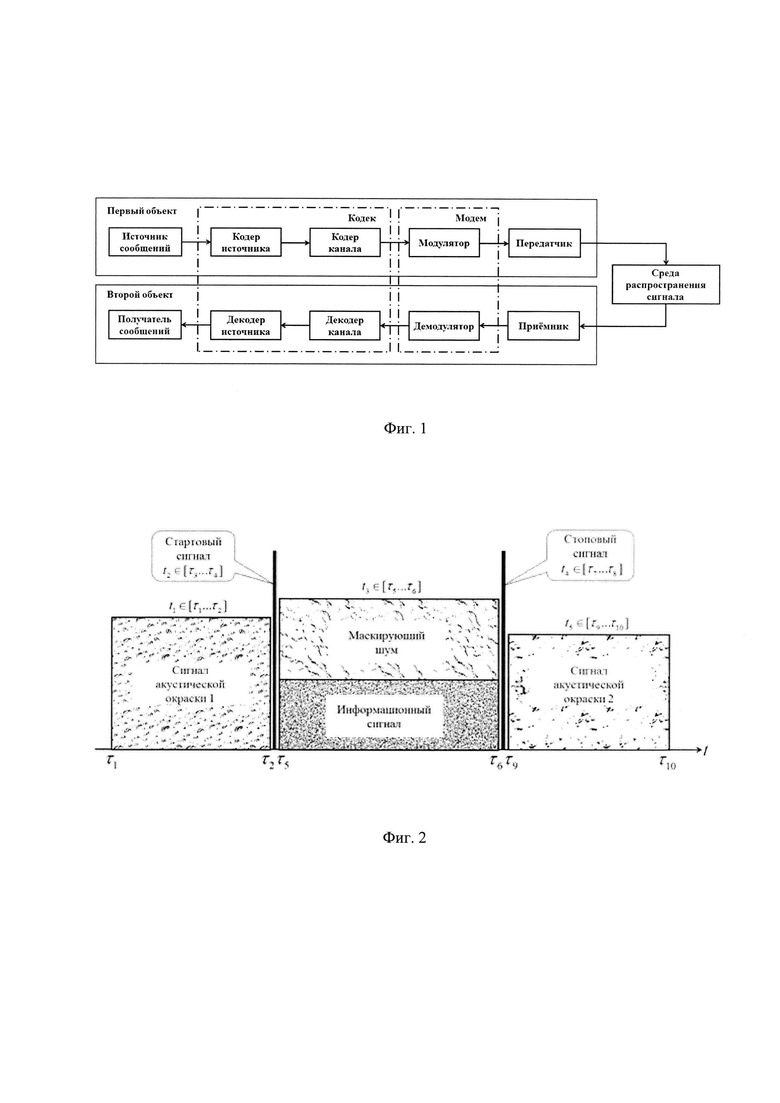
Известен общий способ [2] передачи дискретных сообщений от источника к получателю (фиг. 1), в котором информационные символы источника сообщений первого объекта подвергают кодированию - для минимизации среднего числа символов и обеспечения достоверной передачи сообщений на второй объект. Затем осуществляют необходимую модуляцию колебаний выбранного переносчика информационным сигналом, после чего модулированный сигнал отправляют в соответствующую среду распространения для передачи на второй объект. Принятый на втором объекте сигнал демодулируют, декодируют и передают получателю сообщений.
Известно использование [3] для гидроакустической подводной связи фазомодулированных (фазоманипулированных) и частотно-модулированных сигналов с малой базой и поэлементным приемом.
Известен способ [4] передачи дискретных сообщений в гидроакустическом канале, в котором используют сложные шумоподобные сигналы с большой базой и корреляционной обработкой принимаемых сигналов.
Известно использование [5, 6] стартстопного режима для асинхронного приема дискретных сигналов, когда принимаемой кодовой комбинации предшествует стартовый сигнал, а после ее окончания следует стоповый сигнал.
Указанные способы передачи дискретных сообщений с используемыми методами модуляции передаваемых сигналов и их обработки на приеме не обеспечивают скрытности процесса передачи сообщений между подводными объектами, поскольку излучаемые сигналы обнаруживаются и идентифицируются существующими гидроакустическими средствами наблюдения и мониторинга, что может являться весьма нежелательным обстоятельством при осуществлении некоторых разведывательных и мониторинговых задач в различных морских акваториях.
Известен способ [7] гидроакустического поиска автономного донного подводного объекта, в основе которого лежат следующие основополагающие признаки:
- для передачи в гидроакустическом канале сигналов управления между поисковым судном и подводным объектом используют фрагменты сонограмм записей звуков морских животных, рыб и ракообразных, обладающие ярко выраженным импульсным характером и хорошо различимой структурой для достоверного импульсного приема, с заданными амплитудными, временными и частотными параметрами, обеспечивающие схожесть, по акустическому восприятию, излучаемых в водную среду сигналов с возможными естественными фоновыми шумами морской среды известной акватории;
- гармонический навигационный сигнал в процессе поиска подводного объекта маскируют квазибелым шумом, близким по акустическому восприятию к возможному фоновому шуму мелкого или глубокого моря, а обработку навигационного сигнала на поисковом судне осуществляют с использованием процедуры синфазирования - обеспечения синфазности двух гармонических сигналов, имеющих существенно разные отношения сигнал/шум;
- информационный обмен между объектами взаимодействия «поисковое судно-подводный объект» организуют на основе асинхронного режима приема-передачи сеансовых сигналов поискового судна и подводного объекта с использованием стартовых сигналов;
- структура и параметры излучаемых сигналов подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов поискового судна априорно известны на подводном объекте.
Этот способ содержит функциональные признаки повышенной скрытности информационного обмена между подводными объектами, но не может быть использован для передачи формулярных сообщений в гидроакустических информационно-управляющих сетях в силу двух ограничивающих факторов.
1. Частотные параметры квазибелого шума диапазона частот 20 Гц-20 кГц, маскирующего навигационный сигнал, излучаемый с подводного объекта, определяют, исходя из необходимой точности оценки угловых координат подводного объекта в процессе поиска, обеспечивая превышение не менее пяти раз нижней граничной частоты его спектра над частотой гармонических колебаний навигационного сигнала диапазона частот 2-4 кГц, которую выбирают из условий приемлемых габаритных размеров пеленгационной антенны диаметрально-ортогональной геометрии поискового судна и ее конструктивного размещения на судне, а верхнюю граничную частоту спектра квазибелого шума согласовывают с верхней границей полосы пропускания передающего тракта подводного объекта.
Исходя из требований, предъявляемых к архитектуре гидроакустических информационно-управляющих сетей [1], частоту переносчика модулированных сигналов при передаче дискретных сообщений выбирают из диапазона частот 25-35 кГц, а это превышает не только частоту сигнала, который может быть замаскирован квазибелым шумом указанного диапазона частот, но и верхнюю частоту спектра самого маскирующего шума, что не позволяет осуществить достоверный прием замаскированной квазибелым шумом информационной части передаваемого сеансового сигнала в соответствии со структурой обработки, предложенной в способе [7], последнее подтверждается результатами моделирования в математической среде Mathcad.
2. Асинхронный прием на поисковом судне излучаемого с подводного объекта сеансового сигнала достигается передачей в его начале стартового сигнала, за которым следует сигнал опознавания (акустической окраски), образованный фрагментами сонограмм записей звуков морских животных, рыб и ракообразных с заданными амплитудными, временными и частотными параметрами, обладающими ярко выраженным импульсным характером с хорошо различимой структурой для достоверного импульсного приема, после чего передается гармонический навигационный сигнал, замаскированный квазибелым шумом.
Если в способе [7] вместо гармонического навигационного сигнала передавать модулированный информационный сигнал и реализовать стартстопный режим [5, 6] приема сеансовых сигналов, то импульсы сигнала акустической окраски будут вызывать ложные старты приема, приводящие к невозможности достоверного приема информационного сигнала, что также подтверждается результатами моделирования в математической среде Mathcad.
На основании признаков способов [2, 4, 7] и методов [3, 5, 6] можно сформулировать признаки, которые будут присущи способу-прототипу:
- излучаемые с первого подводного объекта на второй гидроакустические сеансовые сигналы содержат в необходимом соотношении маскируемую информационную часть, акустическую окраску и стартстопные сигналы, в совокупности обеспечивающие достаточное приближение сигналов по акустическому восприятию к возможным естественным фоновым шумам морской среды известной акватории;
- акустическую окраску и стартстопные сигналы создают фрагментами сонограмм записей звуков морских животных, рыб и ракообразных, размещаемыми в соответствующих местах сеансовых сигналов;
- информационную часть излучаемых с первого подводного объекта сеансовых сигналов формируют, используя бинарный фазоманипулированный (БФМ) сигнал с изменениями фазы колебаний несущей на 180°, который маскируют квазибелым шумом, близким по акустическому восприятию к шумам мелкого или глубокого моря;
- на втором подводном объекте реализуют стартстопный режим корреляционного приема БФМ сигнала с осуществлением процедуры синфазирования колебаний его несущей и колебаний гармонического сигнала местного генератора опорных частот;
- частота несущей БФМ сигнала, излучаемого с первого подводного объекта, априорно известна на втором подводном объекте.
Совокупность перечисленных выше признаков позволяет синтезировать способ-прототип, предполагающий в процессе технической реализации, следующие действия:
- оснащают первый подводный объект оборудованием с высокостабильным генератором опорных частот для формирования сеансовых сигналов и их излучения в водную среду;
- оснащают второй подводный объект оборудованием с высокостабильным генератором опорных частот для приема из водной среды и обработки сеансовых сигналов от первого подводного объекта;
- формируют на первом подводном объекте сеансовый сигнал, состоящий из сигналов акустической окраски, стартстопных сигналов и БФМ сигнала, частота несущей которого априорно известна на втором подводном объекте, при этом сигналы акустической окраски и стартстопные сигналы образованы фрагментами сонограмм записей звуков морских животных, рыб и ракообразных, а БФМ сигнал маскируется квазибелым шумом из фрагментов сонограмм записей шумов мелкого или глубокого моря, причем указанные сигналы имеют заданные амплитудные, временные и частотные параметры и размещаются в соответствующих местах сеансового сигнала;
- излучают посредством передающей гидроакустической антенны сформированный на первом подводном объекте сеансовый сигнал в водную среду в направлении второго подводного объекта;
- принимают посредством приемной гидроакустической антенны на втором подводном объекте сеансовый сигнал, переданный от первого подводного объекта;
- обрабатывают принятый от первого подводного объекта сеансовый сигнал, реализуя стартстопный режим корреляционного приема с осуществлением процедуры синфазирования колебаний несущей принимаемого БФМ сигнала и колебаний гармонического сигнала местного генератора опорных частот.
Техническим результатом заявляемого способа является повышение скрытности процесса сеансовой передачи формулярных сообщений между подводными объектами за счет изменения структуры и параметров сеансовых гидроакустических сигналов, излучаемых в водную среду с первого подводного объекта и маскируемых под возможные акустические фоновые шумы известной морской акватории, - звуки морских животных, рыб, ракообразных, шумы моря, а также реализации соответствующих действий по их приему и обработке на втором подводном объекте.
Данный технический результат достигается за счет того, что в способе передачи дискретных сообщений между подводными объектами, заключающемся в оснащении первого подводного объекта оборудованием с высокостабильным генератором опорных частот для формирования сеансовых сигналов и их излучения в водную среду, в оснащении второго подводного объекта оборудованием с высокостабильным генератором опорных частот для приема из водной среды и обработки сеансовых сигналов от первого подводного объекта, в формировании на первом подводном объекте сеансового сигнала, состоящего из сигналов акустической окраски, стартстопных сигналов и БФМ сигнала, которым представлено передаваемое сообщение, значение несущей частоты БФМ сигнала априорно известно на втором подводном объекте, при этом сигналы акустической окраски и стартстопные сигналы образованы фрагментами сонограмм записей звуков морских животных, рыб и ракообразных, а БФМ сигнал замаскирован квазибелым шумом из фрагментов сонограмм записей шумов мелкого или глубокого моря, причем указанные сигналы имеют заданные амплитудные, временные и частотные параметры и размещаются в соответствующих местах сеансового сигнала, в излучении посредством передающей гидроакустической антенны сформированного на первом подводном объекте сеансового сигнала в водную среду в направлении второго подводного объекта, в приеме посредством приемной гидроакустической антенны на втором подводном объекте сеансового сигнала, переданного от первого подводного объекта, в обработке на втором подводном объекте принятого от первого подводного объекта сеансового сигнала с использованием стартстопного режима корреляционного приема БФМ сигнала и осуществлением процедуры синфазирования колебаний его несущей и колебаний гармонического сигнала местного генератора опорных частот, используют для формирования сигналов акустической окраски сеансового сигнала первого подводного объекта фрагменты сонограмм записей звуков морских животных, рыб и ракообразных, обладающие слабо выраженным импульсным характером, осуществляют гетеродинирование принимаемого на втором подводном объекте сеансового сигнала на низкую промежуточную частоту с частотой гетеродина меньшей частоты несущей БФМ сигнала, выбирают при формировании сеансового сигнала первого подводного объекта максимальную граничную частоту спектра маскирующего БФМ сигнал квазибелого шума из условия значительного превышения после операции гетеродинирования сеансового сигнала на втором подводном объекте величины минимальной граничной частоты спектра маскирующего квазибелого шума значения промежуточной частоты преобразования, вводят в сеансовый сигнал первого подводного объекта гармоническую посылку синхронизации заданной длительности с частотой несущей БФМ сигнала, передаваемую перед его информационными посылками без разрыва фазы колебаний несущей информационного сигнала.
Существенными отличиями заявляемого способа являются: использование для формирования сигналов акустической окраски сеансового сигнала первого подводного объекта фрагментов сонограмм записей звуков морских животных, рыб и ракообразных, обладающих слабо выраженным импульсным характером, осуществление гетеродинирования принимаемого на втором подводном объекте сеансового сигнала на низкую промежуточную частоту с частотой гетеродина меньшей частоты несущей БФМ сигнала, выбор при формировании сеансового сигнала первого подводного объекта соответствующей максимальной граничной частоты спектра маскирующего БФМ сигнал квазибелого шума, введение в сеансовый сигнал первого подводного объекта гармонической посылки синхронизации заданной длительности с частотой несущей БФМ сигнала, передаваемой перед его информационными посылками без разрыва фазы колебаний несущей информационного сигнала, что в совокупности позволяет обеспечить необходимую достоверность приема передаваемых формулярных сообщений и повысить скрытность процесса их передачи между подводными объектами.
Совокупность существенных признаков заявляемого способа имеет причинно-следственную связь с достигаемым техническим результатом, из чего можно заключить, что данное техническое решение является новым, обладает изобретательским уровнем, так как явным образом не следует из существующего уровня техники, и пригодно для практического применения.
Предлагаемое изобретение поясняется чертежами.
На фиг. 1 представлена обобщенная структура системы передачи дискретных сообщений.
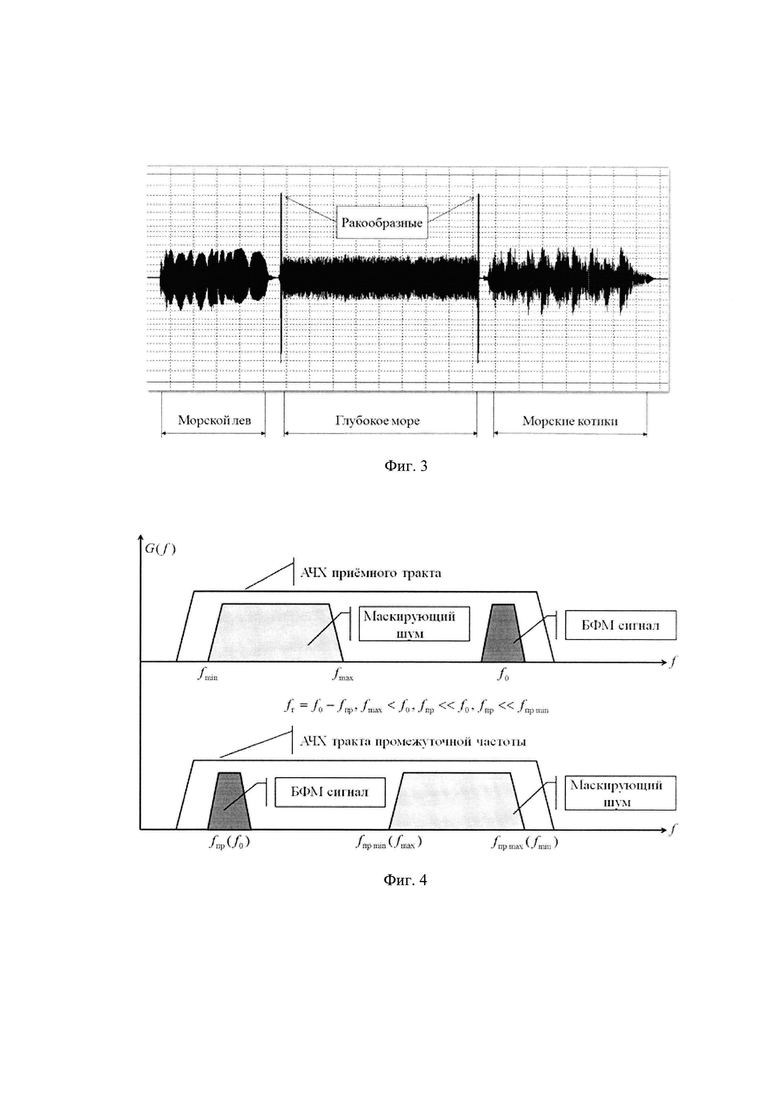
На фиг. 2 показана упрощенная стилизованная структура сеансового сигнала, излучаемого в водную среду известной морской акватории с первого подводного объекта.
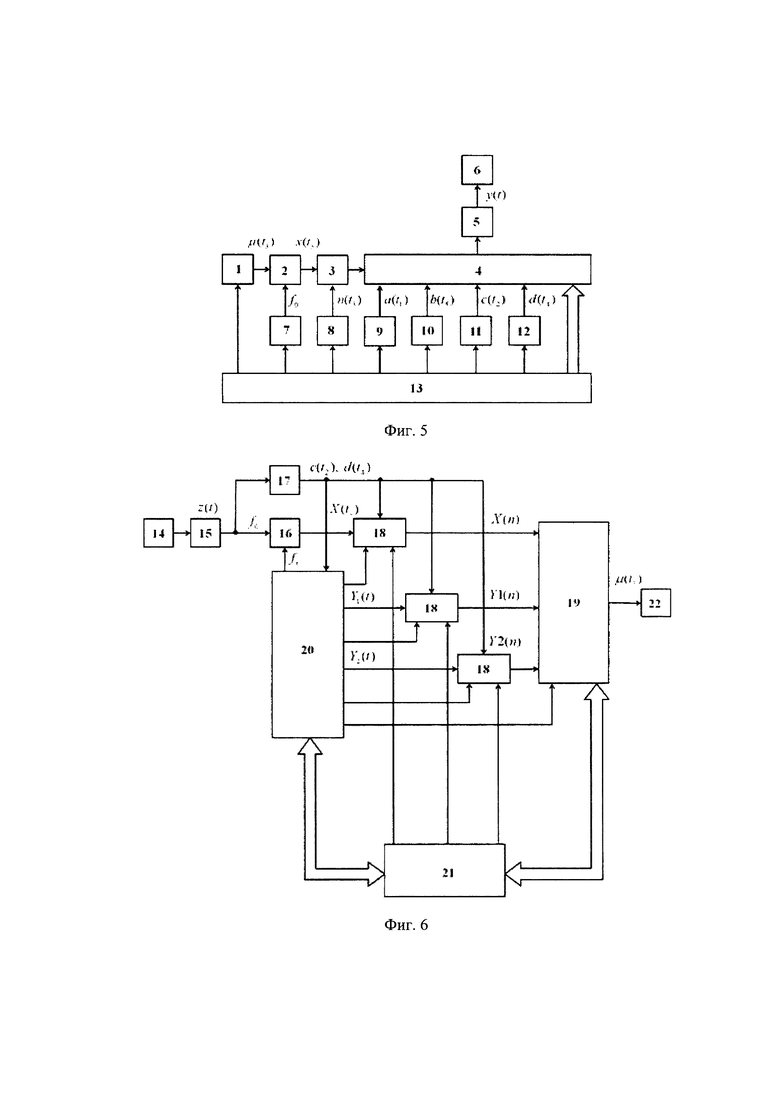
На фиг. 3 приведен пример возможного сеансового сигнала, соответствующего структуре, представленной на фиг. 2.
Фиг. 4 поясняет операцию гетеродинирования информационной части сеансового сигнала на втором подводном объекте.
На фиг. 5 и фиг. 6 приведены примеры укрупненных структурных схем оборудования первого и второго подводного объектов.
Для осуществления скрытной передачи формулярных сообщений между подводными объектами к сеансовому сигналу, излучаемому в водную среду известной морской акватории с первого подводного объекта, предъявляют следующие основные структурные требования:
- общая структура сигнала должна обеспечивать возможность осуществления асинхронного приема его информационной части с использованием стартстопного режима;
- длительность акустической окраски сигнала должна обеспечивать его достаточное приближение к возможному акустическому шумовому фону морской среды;
- превышение сигнала информационной части над фоновыми шумами морской среды должно быть достаточным для его приема с необходимой достоверностью;
- соотношение амплитудных параметров сигнала информационной части и маскирующего его квазибелого шума должно обеспечивать достаточную акустическую маскировку под возможные фоновые шумы известной акватории;
- соотношение частотных параметров сигнала информационной части и квазибелого маскирующего шума должно обеспечивать требуемую достоверность приема замаскированного информационного сигнала при его соответствующей цифровой обработке;
- используемые для акустической окраски сигнала фрагменты сонограмм записей звуков морских животных, рыб и ракообразных должны обладать слабо выраженным импульсным характером для исключения ложных стартов при стартстопном режиме приема информационного сигнала.
Рассмотрим аналитическую основу заявляемого способа.
Сформированный на первом подводном объекте для излучения в водную среду известной морской акватории сеансовый сигнал y(t), в общем случае, содержит в полосе частот ΔFy шесть составляющих (фиг. 2) и имеет вид
где a(t1) - первый сигнал акустической окраски; c(t2) - стартовый сигнал приема; x(t3) - информационная часть сеансового сигнала БФМ структуры; n(t3) - маскирующий информационную часть сигнала квазибелый шум; d(t4) - стоповый сигнал приема; b(t5) - второй сигнал акустической окраски; f0 - несущая частота колебаний БФМ сигнала; μ(t3) - нормированная функция, принимающая значения -1 или 1, повторяющая изменения информационного бинарного сигнала; Uc - амплитуда стартового сигнала приема; Ua - средняя амплитуда первого сигнала акустической окраски; Ux - амплитуда колебаний БФМ сигнала; Ud - амплитуда стопового сигнала приема; Ub - средняя амплитуда второго сигнала акустической окраски; Δτ1 - длительность первого сигнала акустической окраски; Δτ2 - длительность стартового сигнала приема; Δτ3 - длительность БФМ сигнала; Δτ4 - длительность стопового сигнала приема; Δτ5 - длительность второго сигнала акустической окраски; σn - среднеквадратическое отклонение квазибелого шума, маскирующего информационную часть сеансового сигнала.
На фиг. 3, в качестве примера, показана осциллограмма излучаемого с первого подводного объекта сеансового сигнала, в котором в качестве сигналов акустической окраски использованы звуки морских львов и морских котиков, стартовый и стоповый сигналы приема сформированы на основе звуков ракообразных, а информационная часть сигнала замаскирована шумами глубокого моря.
Аналитическая запись сеансового сигнала y(t) (1), принятого на втором подводном объекте, после линейного усиления приобретает следующую форму:

где g - коэффициент, усредненный по частотному диапазону ΔFy излучаемого сигнала y(t), обусловленный затуханием акустических колебаний в водной среде известной акватории, передаточными характеристиками приемной гидроакустической антенны и ее линейного усилителя; ϕв - фазовый сдвиг колебаний БФМ сигнала, вносимый водной средой распространения сигнала, приемной гидроакустической антенной и ее линейным усилителем; ξ(t) - фоновый флуктуационный шум водной акватории в месте приема; σξ - среднеквадратическое отклонение фонового шума.
В описании способа [7] приведены частотные диапазоны, пригодных для использования, возможных фоновых акустических шумов морской среды:
- фрагменты сонограмм записей звуков морских животных, рыб, ракообразных имеют преобладающий частотный диапазон колебаний от 100 Гц до 8 кГц;
- фрагменты сонограмм записей шумов мелкого моря обладают преимущественно частотным диапазоном колебаний от 20 Гц до 20 кГц;
- во фрагментах сонограмм записей шумов глубокого моря превалирует частотный диапазон колебаний от 500 Гц до 20 кГц.
Будем считать, что при формировании БФМ сигналов информационной части сеансового сигнала используются несущие частоты, находящиеся в частотном диапазоне 25-35 кГц, наиболее распространенном для передачи различного рода сообщений в гидроакустическом канале.
Следовательно, для системы передачи сообщений, использующей маскировку под фоновые акустические шумы морской среды, значения частот в полосе маскирующего БФМ сигнал квазибелого шума, излучаемого сеансового сигнала, будут меньше величины несущей частоты БФМ сигнала.
Чтобы получить соответствующую акустическую маскировку и достоверный прием БФМ сигнала в условиях малых отношений сигнал/маскирующий шум, необходимо исключить перекрытие спектров информационного сигнала и маскирующего шума, более того, обеспечить на приеме значительное превышение значений частот в полосе маскирующего шума над несущей частотой БФМ сигнала.
Указанные требования можно выполнить использованием в процессе приема на втором подводном объекте сеансового сигнала первого объекта операции гетеродинирования с преобразованием частот сеансового сигнала вниз, выбирая частоту гетеродина меньше несущей частоты БФМ сигнала и обеспечивая после гетеродинирования величину промежуточной частоты преобразования значительно меньшей значений частот в полосе маскирующего шума.
Операция необходимого гетеродинирования, принятого широкополосной гидроакустической антенной замаскированного БФМ сигнала, иллюстрируется фиг. 4, где обозначены: G(f) - спектральная плотность процессов в области частот f; f0 - несущая частота колебаний БФМ сигнала; fг - частота колебаний гетеродина; fmin, fmax - минимальная и максимальная граничные частоты спектра квазибелого шума, маскирующего БФМ сигнал; fпр - промежуточная частота преобразования при гетеродинировании; fпр min, fпp max - минимальная и максимальная граничные частоты спектра квазибелого шума, маскирующего БФМ сигнал, после операции гетеродинирования.
В процессе гетеродинирования осуществляется перенос БФМ сигнала на промежуточную частоту без изменения его спектра частот (f0→fпр) и преобразование частот маскирующего шума с инверсией спектра частот (fmin→fmax, fmax→ fпр min).
Поскольку сигнал гетеродина uг(t) характеризуется непрерывным гармоническим колебанием:

где Uг, ϕг - амплитуда и начальная фаза сигнала гетеродина, то можно описать, с учетом (2), замаскированный БФМ сигнал, после преобразования частоты вниз и фильтрации колебаний суммарной частоты, зависимостью:
где χ - коэффициент передачи преобразователя частоты (смеситель + фильтр); ΔFпр - полоса пропускания тракта промежуточной частоты; ΔF - полоса пропускания приемной широкополосной гидроакустической антенны; ΔFy - частотный диапазон излучаемого сеансового сигнала y(t); ϕпр - фазовый сдвиг, внесенный преобразователем частоты.
Для обработки на втором подводном объекте замаскированного БФМ сигнала формируется вспомогательный сигнал Y(t) промежуточной частоты fпр в виде двух квадратурных составляющих Y1(t) in Y2(f), с большим отношением сигнал/шум, которые математически характеризуются как функционально связанные непрерывные гармонические колебания:

где U0, ϕ0 - амплитуда и начальная фаза колебаний.
Прием замаскированного БФМ сигнала X(t3) осуществляется с использованием синхронизации по несущей информационного сигнала. Для этого выполняется процедура синфазирования гармонических колебаний вспомогательного сигнала Y(t) и колебаний гармонической посылки синхронизации, передаваемой в БФМ сигнале перед информационными посылками без разрыва фазы колебаний несущей информационного сигнала.
Длительность гармонической посылки синхронизации, для упрощения технической реализации приема, следует выбирать кратной длительности информационной посылки, при этом сама процедура синфазирования осуществляется на интервале, равном длительности информационной посылки, а длительность дополнительного временного интервала гармонической посылки синхронизации, который можно назвать защитным, согласовывается со временем, необходимым для выполнения соответствующих операций в процедуре синфазирования. Указанная процедура синфазирования предполагает выполнение следующих действий и операций.
Вспомогательные сигналы Y1(t), Y2(t) и БФМ сигнал X(t3) на интервале посылки синхронизации, равном длительности информационной посылки, подвергают синхронной дискретизации с количеством отсчетов k на периоде колебаний промежуточной частоты и общим числом отсчетов L на длительности этого интервала.
Запоминают три массива Y1(n), Y2(n), Х(n) выборок сигналов:

где n - порядковый номер отсчета в выборке массива, при этом параметры k и L связаны соотношениями: L=100 k, k≥360.
Вычисляют и запоминают весовые коэффициенты w1 и w2, определяющие проекции сигнала Х(t3) (для интервала посылки синхронизации) на квадратурные составляющие вспомогательного сигнала Y(t):
Выполнение операций (7) позволяет находить проекции сигнала X(t3) (на длительности гармонической посылки синхронизации) с малым отношением сигнал/маскирующий шум на квадратурные составляющие Y1(t) и Y2(t) вспомогательного гармонического сигнала Y(t), имеющего большое отношение сигнал/шум.
Указанные проекции необходимы для получения массива R(n) отсчетов гармонического сигнала с большим отношением сигнал/шум, синфазного с несущей замаскированного БФМ сигнала, используемого для дальнейшего корреляционного приема информационных посылок сеансового сигнала.
Отсчеты массива R(n) формируют и запоминают в результате следующей операции:

Корреляционный прием информационных посылок замаскированного БФМ сигнала реализуют с использованием импульсов тактовой синхронизации, сформированных после приема стартового сигнала, передаваемого перед посылкой синхронизации. Процедура корреляционного приема предусматривает выполнение следующих действий и операций.
Осуществляют, по мере поступления импульсов тактовой синхронизации, дискретизацию гармонических колебаний (с запоминанием соответствующего массива отсчетов Х(n) для последующей обработки в режиме «аппаратно-программного» времени) каждой информационной посылки замаскированного шумом БФМ сигнала X(t3) с количеством отсчетов k на периоде колебаний промежуточной частоты и общим числом отсчетов L на длительности посылки:

где n - порядковый номер отсчета в выборке массива, при этом параметры k и L связаны, как и при синфазировании, соотношениями: L=100 k, k≥360.
Для уменьшения времени последующих вычислений осуществляют нормирование отсчетов массивов R(n) и Х(n) путем их представления своими знаками по правилу:

Вычисляют на длительности τи каждой информационной посылки замаскированного БФМ сигнала корреляционный параметр βг:

Принимают решение о приеме соответствующего информационного символа μ(t3):

Выбор базовых параметров дискретизации (k≥360) и усреднения (L=100k) осуществлен по результатам моделирования системы передачи сообщений в математической среде Mathcad для достижения приемлемой достоверности приема бинарных сигналов с вероятностью ошибок Р0≤10-3.
Исходя из выбранного значения параметра L (сто периодов промежуточной частоты при усреднении), можно оценить необходимую для достоверного приема длительность τи информационной посылки БФМ сигнала и частоту манипуляции Fm при го формировании:

Так, например, при выборе промежуточной частоты преобразования fпр=1 кГц длительность информационной посылки БФМ сигнала не может быть менее τи≥0.1 с, а частота манипуляции при его формировании не будет превышать Fm≤10 Гц, что соответствует канальной скорости передачи формулярных сообщений не более 10 Бод.
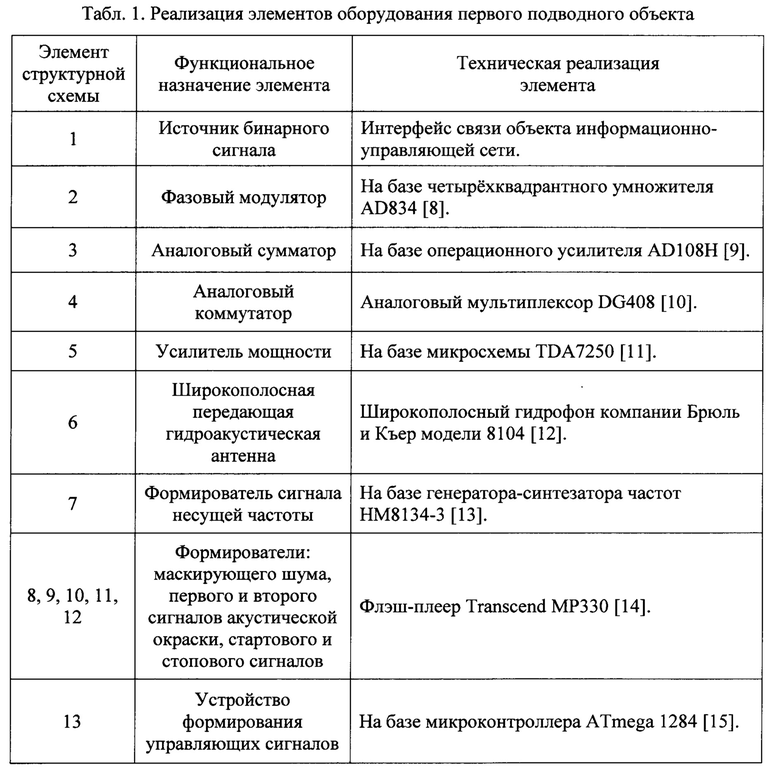
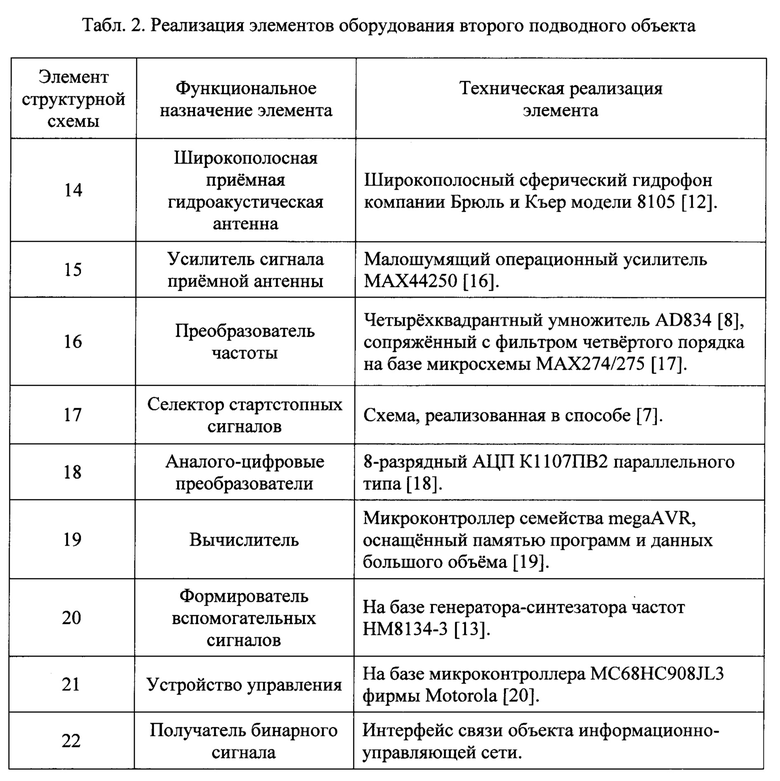
Укрупненные структурные схемы функциональных элементов передающей (на первом подводном объекте) и приемной (на втором подводном объекте) частей системы скрытной передачи формулярных сообщений представлены на фиг. 5 и фиг. 6 соответственно, где обозначены: 1 - источник бинарного сигнала; 2 - фазовый модулятор; 3 - аналоговый сумматор; 4 - аналоговый коммутатор; 5 - усилитель мощности; 6 - широкополосная передающая гидроакустическая антенна; 7 - формирователь сигнала несущей частоты; 8 - формирователь маскирующего шума; 9 - формирователь первого сигнала акустической окраски; 10 - формирователь второго сигнала акустической окраски; 11 - формирователь стартового сигнала; 12 - формирователь стопового сигнала; 13 - устройство формирования управляющих сигналов; 14 - широкополосная приемная гидроакустическая антенна; 15 - усилитель сигнала приемной антенны; 16 - преобразователь частоты; 17 - селектор стартстопных сигналов; 18 - аналого-цифровые преобразователи; 19 - вычислитель; 20 - формирователь вспомогательных сигналов; 21 -устройство управления; 22 - получатель бинарного сигнала.
Техническая реализация заявляемого способа скрытной передачи формулярных сообщений между подводными объектами предполагает выполнение определенных действий, процедур и операций, которые, для удобства восприятия, целесообразно разделить на соответствующие этапы.
Выбор параметров сеансового сигнала
Из априорно известного частотного диапазона (25-35 кГц) системы передачи сообщений выбирают несущую частоту f0 колебаний сеансового БФМ сигнала.
Определяют временные, амплитудные, частотные параметры сигналов a(t1), b(t5) акустической окраски и стартстопных сигналов c(t2), d(t4) излучаемого сеансового сигнала, а также амплитудные параметры квазибелого шума n(t3), маскирующего БФМ сигнал. Достаточно подробно подход к выбору и рекомендуемые параметры указанных сигналов рассмотрены в описании способа [7] скрытного гидроакустического поиска автономного донного подводного объекта.
С учетом соображений приемлемой технической реализации оборудования и распространенных в гидроакустических модемах скоростей передачи сообщений, на основе требования:  (см. (13)), выбирают промежуточную частоту fпр преобразования в операции гетеродинирования с частотой гетеродина fг=f0-fпр из предпочтительного для цифровой обработки сигналов диапазона частот 1-5 кГц.
(см. (13)), выбирают промежуточную частоту fпр преобразования в операции гетеродинирования с частотой гетеродина fг=f0-fпр из предпочтительного для цифровой обработки сигналов диапазона частот 1-5 кГц.
Из условия достоверного приема БФМ сигналов:  где fпр min=f0 - fпр - fmax (см. фиг. 4), на основе неравенства: fmax≤f0 - 11 fпр, определяют максимальную граничную частоту fmax спектра квазибелого шума n(t3), маскирующего БФМ сигнал.
где fпр min=f0 - fпр - fmax (см. фиг. 4), на основе неравенства: fmax≤f0 - 11 fпр, определяют максимальную граничную частоту fmax спектра квазибелого шума n(t3), маскирующего БФМ сигнал.
Минимальную граничную частоту fmin спектра квазибелого шума, маскирующего излучаемый БФМ сигнал, согласовывают с частотной характеристикой широкополосной передающей гидроакустической антенны в области низких частот.
Рассчитывают, с использованием зависимости:  (см. (13)), частоту манипуляции Fm для формирования БФМ сигнала и частоту импульсов тактовой синхронизации во время его приема, равную частоте манипуляции.
(см. (13)), частоту манипуляции Fm для формирования БФМ сигнала и частоту импульсов тактовой синхронизации во время его приема, равную частоте манипуляции.
Формирование и излучение сеансового сигнала на первом подводном объекте С использованием необходимых фрагментов сонограмм записей звуков морских животных, рыб, ракообразных во флэш-плеерах формирователей 9, 10 записывают сигналы a(t1), b(t5) акустической окраски, имеющие слабо выраженный импульсный характер, а во флэш-плеерах формирователей 11, 12 - стартстопные сигналы c(t2), d(t4) с параметрами, определенными на этапе выбора параметров сеансового сигнала.
Из фрагментов сонограмм записей шумов мелкого или глубокого моря во флэш-плеере формирователя 8 записывают маскирующий квазибелый шум n(t3), соответствующий длительности БФМ сигнала, с граничными частотами спектра fmin и fmax, также установленными на этапе выбора параметров сеансового сигнала.
Под управлением устройства 13 формирования управляющих сигналов:
- в фазовом модуляторе 2 осуществляют фазовую манипуляцию колебаний несущей частоты f0 формирователя 7 сигнала несущей частоты бинарным информационным сигналом μ(t3) источника 1 с частотой манипуляции Fm, рассчитанной на этапе выбора параметров сеансового сигнала, формируя без разрыва фазы колебаний несущей перед посылками информационного сигнала гармоническую посылку синхронизации заданной длительности с указанной несущей частотой;
- с помощью аналогового сумматора 3 к БФМ сигналу х(t3) добавляют квазибелый шум n(t3) формирователя 8 маскирующего шума;
- посредством аналогового коммутатора 4 из сигналов a(t1), c(t2), x(t3), n(t3), d(t4), b(t5) формируют сеансовый сигнал y(t) заданной длительности и выбранной структуры (см. фиг. 2 и фиг. 3).
Усилителем 5 мощности сеансовый сигнал y(t) доводят до уровня, обеспечивающего необходимую акустическую мощность, и излучают широкополосной передающей гидроакустической антенной 6 в водную среду в направлении второго подводного объекта.
Прием и обработка сеансового сигнала на втором подводном объекте
Принимают широкополосной приемной гидроакустической антенной 14 и усиливают до необходимого уровня усилителем 15 сигнала приемной антенны сеансовый сигнал z(t) с несущей частотой f0 БФМ сигнала.
Обработку принятого сеансового сигнала z(t) производят с использованием многофункционального устройства 21 управления, которое может быть реализовано на базе одного из видов современных микроконтроллеров.
Осуществляют гетеродинирование усиленного сеансового сигнала z(t) на выбранную промежуточную частоту fпр с частотой колебаний fr - f0- fпр сигнала гетеродина, поступающего на преобразователь частоты 16 от формирователя 20 вспомогательных сигналов, который формирует также гармонические квадратурные сигналы Y1(t) и Y2{t) промежуточной частоты с большим отношением сигнал/шум и импульсные сигналы тактовой синхронизации с частотой манипуляции Fm, необходимые для работы аналого-цифровых преобразователей 18 и вычислителя 19.
По стартовому сигналу c(t2) усиленного сеансового сигнала z(t), выделенному селектором 17 стартстопных сигналов, посредством аналого-цифровых преобразователей 18 выполняют на длительности посылки синхронизации БФМ сигнала синхронную дискретизацию сигналов Y1(t), Y2(t) формирователя 20 вспомогательных сигналов и сигнала X(t3) на выходе преобразователя частоты 16 с количеством отсчетов k на периоде колебаний промежуточной частоты и общим числом отсчетов L на длительности посылки, которые выбирают соответственно k≥360, L=100k.
Далее, в вычислителе 19, из полученных на длительности посылки синхронизации БФМ сигнала от аналого-цифровых преобразователей 18 отсчетов:
- формируют и запоминают три массива выборок Y1(n), Y2(n), X(n);
- вычисляют и запоминают весовые коэффициенты w1 и w2, определяющие проекции сигнала X(t3) на квадратурные составляющие Y2(t), Y2{t) вспомогательного сигнала Y(t) - операции (7);
- выполняют операцию (8) по получению и запоминанию массива R(n) отсчетов гармонического сигнала с большим отношением сигнал/шум, синфазного с несущей замаскированного БФМ сигнала на промежуточной частоте.
Реализуют корреляционный прием информационных посылок замаскированного БФМ сигнала с использованием импульсов тактовой синхронизации формирователя 20 вспомогательных сигналов, следующих за посылкой синхронизации с частотой манипуляции Fm и сформированных после приема стартового сигнала c(t2).
Корреляционный прием предусматривает:
- дискретизацию посредством аналого-цифровых преобразователей 18, по мере поступления сигнала тактовой синхронизации от формирователя 20 вспомогательных сигналов, гармонических колебаний, с последующим запоминанием в вычислителе 19 соответствующего массива отсчетов Х(n), каждой информационной посылки замаскированного шумом БФМ сигнала X(t3) с количеством отсчетов k на периоде колебаний промежуточной частоты и общим числом отсчетов L на длительности посылки - операция (9);
- нормирование, в вычислителе 19, отсчетов массивов R(n) и Х(n) путем их представления своими знаками по правилу (10);
- определение, в вычислителе 19, на длительности τи каждой информационной посылки БФМ сигнала, корреляционного параметра βг - операция (11);
- принятие, в вычислителе 19, решения о приеме соответствующего информационного символа μ(t3) по правилу (12).
Завершают процесс приема информационных посылок БФМ сигнала по стоповому сигналу d(t4), выделенному селектором 17 стартстопных сигналов из принятого сеансового сигнала z(t). Обработка стартового c(t2) и стопового d(t4) сигналов в селекторе 17 стартстопных сигналов аналогична обработке стартовых посылок гидроакустических сигналов в способе [7] скрытного гидроакустического поиска автономного донного подводного объекта.
Передают получателю 22 из вычислителя 19 блок принятых в сеансовом сигнале бинарных μ(t3) информационных символов.
При технической реализации заявляемого способа может быть использована современная элементная база и цифровые технологии обработки сигналов. Примеры возможной технической реализации функциональных элементов оборудования первого и второго подводных объектов, с использованием промышленно выпускаемых изделий, представлены в табл. 1 и табл. 2 соответственно.
Для оценки достоверности приема сеансовых БФМ сигналов, в условиях маскирования квазибелым шумом, было проведено статистическое моделирование в математической среде Mathcad.
При моделировании использовались следующие исходные данные: количество сеансов приема БФМ сигналов - 50; число информационных символов БФМ сигнала в сеансе - 100; маскирующий квазибелый шум, с заданной полосой частот, имел нормальное распределение с нулевым средним, обеспечивалась некоррелированность реализаций шума от посылки к посылке принимаемого БФМ сигнала; число усредняемых периодов промежуточной частоты при синфазировании и корреляционном приеме информационных символов - 100; количество отсчетов на периоде колебаний промежуточной частоты при дискретизации каждой посылки БФМ сигнала для его корреляционного приема k=360; нижняя граница полосы частот квазибелого шума на промежуточной частоте при корреляционном приеме fпp min=10⋅fпр; верхняя граница полосы частот квазибелого шума на промежуточной частоте при корреляционном приеме fпp min=15⋅fпр; доплеровское смещение несущей частоты принимаемого БФМ сигнала относительно соответствующей частоты формирователя вспомогательных сигналов составляло 2⋅10-3, что соответствовало относительному перемещению передатчика и приемника гидроакустической линии связи с радиальной скоростью 3 м/с (5.84 узла).
В процессе моделирования получены следующие важные системные результаты:
- для поэлементного приема сеансового БФМ сигнала с достоверностью Р0≤10-3 величина превышения среднеквадратического отклонения квазибелого маскирующего шума над амплитудой БФМ сигнала не должна превышать 30 дБ;
- увеличение количества отсчетов на периоде колебаний промежуточной частоты при дискретизации каждой посылки БФМ сигнала для его корреляционного приема, относительно выбранного базового значения (k=360), не повышает сеансовую достоверность приема.
Если считать верхней границей приемлемой маскировки БФМ сигнала в процессе передачи сообщений величину отношения сигнал/маскирующий шум Hmax≤-15 дБ, а достаточную для достоверного приема с вероятностью ошибок уровня Р0≈10-3 нижнюю границу указанного отношения Hmin≥-30 дБ, то можно оценить возможную длину скрытной гидроакустической линии связи (наклонное расстояние между передатчиком и приемником гидроакустических сигналов) для заданной несущей частоты f0 излучаемого БФМ сигнала и выбранной максимальной граничной частоты fmax спектра маскирующего квазибелого шума.
Так, например, для частотных параметров гидроакустической системы передачи сообщений: f0=30 кГц, fmax=10 кГц, на основе полуэмпирической зависимости погонного затухания от частоты акустических колебаний в морской воде [2], можно получить длину Dл гидроакустической линии связи для скрытной передачи сообщений с указанной выше достоверностью. Эта длина может быть рассчитана по формуле:

где частоты выражены в кГц.
Такой длины линии связи вполне достаточно для организации фрагментов информационно-управляющих подводных сетей, интегрированных систем подводного мониторинга, гидрорелейных систем с повышенной скрытностью передачи формулярных сообщений.
Таким образом, предлагаемое техническое решение позволяет достичь желаемого эффекта - повышения скрытности процесса передачи формулярных сообщений между подводными объектами, за счет до сих пор не применявшегося сочетания: использования для формирования сигналов акустической окраски сеансового сигнала первого подводного объекта фрагментов сонограмм записей звуков морских животных, рыб и ракообразных, обладающих слабо выраженным импульсным характером, исключая этим ложные старты при стартстопном режиме приема БФМ сигнала на втором объекте, осуществления гетеродинирования принимаемого на втором подводном объекте сеансового сигнала на низкую промежуточную частоту с частотой гетеродина меньшей частоты несущей БФМ сигнала, выбора при формировании сеансового сигнала первого подводного объекта соответствующей максимальной граничной частоты спектра квазибелого маскирующего шума, достигая этим требуемой достоверности приема БФМ сигнала на втором объекте, введения в сеансовый сигнал первого подводного объекта гармонической посылки синхронизации заданной длительности с частотой несущей БФМ сигнала, передаваемой перед его информационными посылками без разрыва фазы колебаний несущей, обеспечивая этим реализацию корреляционного приема замаскированного шумом БФМ сигнала на втором подводном объекте с синхронизацией по несущей частоте информационного сигнала.
Такая совокупность признаков нового технического решения отличает предлагаемый способ от известных в настоящее время способов передачи дискретных сообщений между подводными объектами.
Список использованных источников
1. Абаренов С.П, Арсентьев В.Г., Криволапое Г.И. О выборе частотных и пространственных параметров гидроакустических информационно-управляющих сетей на основе обобщенных энергетических показателей // Фундаментальная и прикладная гидрофизика. 2014. т. 7. №2. С. 27-35.
2. Ленин П.И. Системы передачи цифровой информации. Учебное пособие для вузов. М.: Сов. Радио, 1976.
3. Богданов Е.В., Вьюнг Х.Т., Давыдов B.C. Выбор сигналов и метода их обработки для гидроакустической подводной связи в мелком море // Известия вузов России. Радиоэлектроника. 2004. Вып. 1. С. 26-33.
4. Курьянов Б.Ф., Пенкин М.М. Цифровая акустическая связь в мелком море для океанологических применений // Акустический журнал. 2010. Т. 56. №2. С. 245-255.
5. Методы передачи сигналов в оконечных устройствах абонентского доступа [Электронный ресурс] // URL: https://studfile.net/preview/5158658 (дата обращения: 11.11.2020).
6. Патент RU 2168867, МПК: H04L 25/00. Стартстопная система связи / Г.Б. Волобуев, В.И. Дедовских. Заявлено 30.03.2000, опубликовано 10.06.2001.
7. Патент RU 2727331, МПК: G01S 15/00. Способ гидроакустического поиска автономного донного подводного объекта / В.Г. Арсентьев, Г.И. Криволапое. Заявлено 25.12.2019, опубликовано 21.07.2020. Бюл. №21.
8. Четырехквадрантный умножитель AD834 [Электронный ресурс] // URL: http://www.analog,com/ru/products/analog-functions/analog-multipliers-dividers/ad834.html (дата обращения: 11.11.2020).
9. Турута Е.Ф. Операционные усилители: справочник. М.: Патриот, 1996.
10. Аналоговые ключи и мультиплексоры VISHAY [Электронный ресурс] // URL: https://www.compel.ru/lib/54817 (дата обращения: 11.11.2020).
11. Усилитель на микросхеме TDA7250 [Электронный ресурс] // URL: http://www.radiomaster.net/pdf/audio/us_mos.pdf (дата обращения: 11.11.2020).
12. Сведения об изделии. Гидрофоны: типы 8101 - 8106 [Электронный ресурс] // URL: http://asm-tm.ru/wp-content/uploads/2014/08/8101-8106-Gidrofony-NEW-PD.pdf (дата обращения: 11.11.2020).
13. Генератор-синтезатор частот НМ8134-3 [Электронный ресурс] // URL: https://www.eskomp.ru/UFiles/bukl/GENERATOR_HMF8.pdf (дата обращения: 11.11.2020).
14. Портативные плееры [Электронный ресурс] // URL: https://headphonesbest.ru/portativnyj-pleer/14941top-15-luchshix-portativnyx-mp3-pleerov.html (дата обращения: 11.11.2020).
15. Микроконтроллеры ATmega [Электронный ресурс] // URL: http://avr.ru/docs/d-sheet/atmega (дата обращения: 11.11.2020).
16. Прецизионные малошумящие операционные усилители [Электронный ресурс] // URL: http://www.symmetron.ru/news/maxim-MAX44250.shtml (дата обращения: 11.11.2020).
17. Техника и принципы схемотехнической реализации фильтров на операционных усилителях [Электронный ресурс] // URL: http://studbooks.net/783435/tehnika/printsipy_shemotehnicheskoy_realizatsii_filtrov_na_operatsionnom_usilitele (дата обращения: 11.11.2020).
18. Справочник по АЦП ЦАП [Электронный ресурс] // URL: http://azp.ucoz.ru/index/ltc1742_14_razrjadnyj_maloshumjashhij_acp_s_chastotoj_preobrazovanija_65_mgc/0-75 (дата обращения: 11.11.2020).
19. Евстифеев А.В. Микроконтроллеры AVR семейства Mega: руководство пользователя. М.: Издательский дом «Додэка-ХХ1», 2007.
20. Микроконтроллеры MC68HC908JL3/JK3/JK1 [Электронный ресурс] // URL: http://www.compitech.ru/html.cgi/arhiv/02_06/stat_92.htm (дата обращения: 11.11.2020).
Использование: изобретение относится к области гидроакустической связи и может быть использовано в гидроакустических информационно-управляющих сетях на участках гидрорелейных линий для передачи формулярных сообщений с ограниченным объемом информационных символов. Сущность: в способе передачи дискретных сообщений между подводными объектами для формирования сигналов акустической окраски сеансового сигнала первого подводного объекта используют фрагменты сонограмм записей звуков морских животных, рыб и ракообразных, обладающие слабо выраженным импульсным характером, осуществляют гетеродинирование принимаемого на втором подводном объекте сеансового сигнала на низкую промежуточную частоту с частотой гетеродина, меньшей частоты несущей бинарного фазоманипулированного сигнала, выбирают при формировании сеансового сигнала первого подводного объекта максимальную граничную частоту спектра маскирующего бинарный фазоманипулированный сигнал квазибелого шума из условия значительного превышения после операции гетеродинирования сеансового сигнала на втором подводном объекте величины минимальной граничной частоты спектра маскирующего квазибелого шума значения промежуточной частоты преобразования, вводят в сеансовый сигнал первого подводного объекта гармоническую посылку синхронизации заданной длительности с частотой несущей бинарного фазоманипулированного сигнала, передаваемую перед его информационными посылками без разрыва фазы колебаний несущей информационного сигнала. Технический результат: повышение скрытности процесса сеансовой передачи формулярных сообщений между подводными объектами за счет изменения структуры и параметров сеансовых гидроакустических сигналов, излучаемых в водную среду с первого подводного объекта и маскируемых под возможные акустические фоновые шумы известной морской акватории, а также реализации соответствующих действий по их приему и обработке на втором подводном объекте. 6 ил., 2 табл.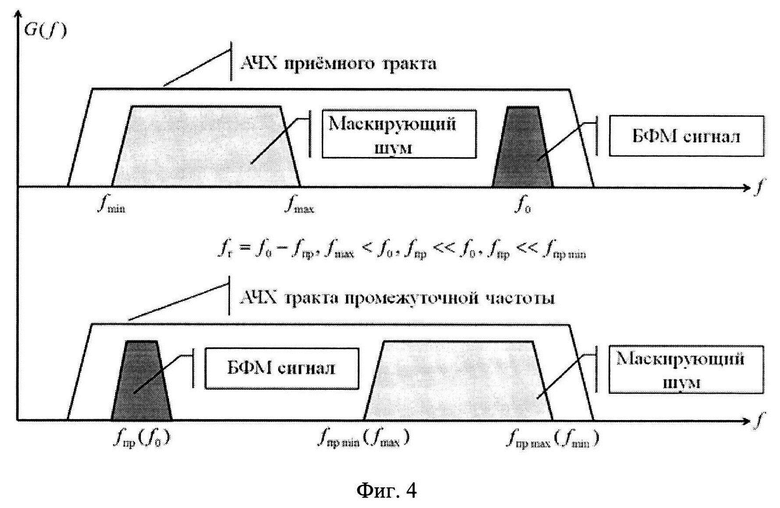
Способ передачи дискретных сообщений между подводными объектами, заключающийся в оснащении первого подводного объекта оборудованием с высокостабильным генератором опорных частот для формирования сеансовых сигналов и их излучения в водную среду, в оснащении второго подводного объекта оборудованием с высокостабильным генератором опорных частот для приема из водной среды и обработки сеансовых сигналов от первого подводного объекта, в формировании на первом подводном объекте сеансового сигнала, состоящего из сигналов акустической окраски, стартстопных сигналов и бинарного фазоманипулированного сигнала, которым представлено передаваемое сообщение, значение несущей частоты бинарного фазоманипулированного сигнала априорно известно на втором подводном объекте, при этом сигналы акустической окраски и стартстопные сигналы образованы фрагментами сонограмм записей звуков морских животных, рыб и ракообразных, а бинарный фазоманипулированный сигнал замаскирован квазибелым шумом из фрагментов сонограмм записей шумов мелкого или глубокого моря, причем указанные сигналы имеют заданные амплитудные, временные и частотные параметры и размещаются в соответствующих местах сеансового сигнала, в излучении посредством передающей гидроакустической антенны сформированного на первом подводном объекте сеансового сигнала в водную среду в направлении второго подводного объекта, в приеме посредством приемной гидроакустической антенны на втором подводном объекте сеансового сигнала, переданного от первого подводного объекта, в обработке на втором подводном объекте принятого от первого подводного объекта сеансового сигнала с использованием стартстопного режима корреляционного приема бинарного фазоманипулированного сигнала и осуществлением процедуры синфазирования колебаний его несущей и колебаний гармонического сигнала местного генератора опорных частот, отличающийся тем, что используют для формирования сигналов акустической окраски сеансового сигнала первого подводного объекта фрагменты сонограмм записей звуков морских животных, рыб и ракообразных, обладающие слабо выраженным импульсным характером, осуществляют гетеродинирование принимаемого на втором подводном объекте сеансового сигнала на низкую промежуточную частоту с частотой гетеродина, меньшей частоты несущей бинарного фазоманипулированного сигнала, выбирают при формировании сеансового сигнала первого подводного объекта максимальную граничную частоту спектра маскирующего бинарный фазоманипулированный сигнал квазибелого шума из условия значительного превышения после операции гетеродинирования сеансового сигнала на втором подводном объекте величины минимальной граничной частоты спектра маскирующего квазибелого шума значения промежуточной частоты преобразования, вводят в сеансовый сигнал первого подводного объекта гармоническую посылку синхронизации заданной длительности с частотой несущей бинарного фазоманипулированного сигнала, передаваемую перед его информационными посылками без разрыва фазы колебаний несущей информационного сигнала.
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2000 |
|
RU2168867C1 |
| Способ передачи информации в системах связи с шумоподобными сигналами | 2016 |
|
RU2633614C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 2014 |
|
RU2549188C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В ЦИФРОВОЙ СИСТЕМЕ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 2014 |
|
RU2571872C1 |
| US 20070089037 A1, 19.04.2007. | |||

