Предлагаемое изобретение относится к области подводной навигации и может быть использовано в системах гидроакустического мониторинга различного назначения, интегрированных системах подводного наблюдения, позиционных сетецентрических сетях для скрытного гидроакустического поиска с надводного поискового судна подводных объектов, находящихся на дне известной морской акватории в спящем режиме после выполнения соответствующей миссии.
Известен способ навигации [1], где исследуемый полигон акватории координируют тремя акустическими маяками-ответчиками, с которыми автономный подводный объект взаимодействует, получая запрос и передавая свой акустический сигнал, а маяки передают на поисковое судно свои расстояния до подводного объекта. На судне вычисляют координаты объекта как точку пересечения трех сфер и уточняют их по мере приближения судна к подводному объекту.
Этот способ достаточно громоздок, требует больших затрат судового времени для развертывания, дорог в эксплуатации и не обеспечивает скрытности гидроакустического поиска, поскольку сигналы взаимодействия автономного подводного объекта, маяков-ответчиков и поискового судна обнаруживаются и идентифицируются существующими гидроакустическими средствами наблюдения и мониторинга, что является весьма нежелательным обстоятельством при выполнении некоторых разведывательных и мониторинговых задач в различных морских акваториях.
Известна гидроакустическая навигационная система [2] с ультракороткой базой для позиционирования подводных объектов, в которой надводное судно оснащается четырехэлементной пеленгационной антенной диаметрально-ортогональной геометрии, а запрашиваемый подводный объект передает на надводное судно комбинированный сигнал, в общем случае, состоящий из навигационного и информационного блоков. Соответствующая обработка этого сигнала позволяет с достаточной точностью определять параметры местоположения подводного объекта: пеленг, угол места, дальность, наклонное расстояние относительно надводного судна и получать от объекта необходимые информационные сообщения. В этой системе также не обеспечивается скрытность, поскольку сигналы взаимодействия подводного объекта и надводного судна обнаруживаются и идентифицируются существующими гидроакустическими средствами наблюдения и мониторинга.
Известен способ [3] определения относительно поискового судна местоположения автономного донного подводного аппарата, снабженного маяком-пингером, излучающим периодические тональные импульсные сигналы, предварительно синхронизированные с судовым генератором аналогичных опорных сигналов, при этом сигналы маяка-пингера принимают судовой антенной, вычисляют их временное смещение относительно одноименных опорных сигналов, умножая которое на скорость звука в воде, получают наклонное расстояние от маяка-пингера до судна, используя судовую приемную антенну дипольного типа с минимумом диаграммы направленности и механически вращая ее относительно вертикальной оси, фиксируют пеленг маяка-пингера подводного аппарата относительно судовых координат по минимуму амплитуды принимаемого сигнала, а также используя судовой эхолот, определяют глубину акватории под судном, затем из геометрического построения вычисляют дальность аппарата, что в совокупности с углом пеленга дает оценку ориентировочных, относительно поискового судна, координат автономного донного подводного аппарата, которые постоянно уточняются по мере движения судна в направлении позиционируемого подводного аппарата.
Данному способу также присущ недостаток, связанный с отсутствием скрытности процесса гидроакустического поиска автономного донного подводного объекта, вследствие использования и возможного опознавания демаскирующих, имеющих искусственное происхождение, акустических сигналов, свидетельствующих, по данным гидроакустической разведки, о самом факте проведения привлекающих внимание подводных работ.
Известен способ [4] скрытного гидроакустического поиска с надводного поискового судна автономного донного подводного объекта, являющийся способом-прототипом заявляемого способа, который предполагает в общем процессе гидроакустического поиска выполнение следующих действий, процедур и операций.
1. Оборудуют поисковое судно согласованной с его курсом пеленгационной антенной диаметрально-ортогональной геометрии расположения четырех приемных гидрофонов, слабонаправленной передающей гидроакустической антенной, аппаратурой приема и обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на базе высокостабильного опорного генератора, аппаратурой формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустическим эхолотом для измерения глубины акватории поиска со структурой зондирующих импульсов, позволяющей обеспечить акустическое восприятие процедуры измерения глубины водной акватории поиска, приближающееся к возможному гибридному шумовому фону морской среды.
2. Оснащают автономный донный подводный объект системой изменения плавучести, слабонаправленными приемной и передающей гидроакустическими антеннами, аппаратурой приема и обработки сигналов активации и всплытия поискового судна, маяком-пингером, формирующим, с использованием высокостабильного опорного генератора, повторяющийся навигационный сигнал.
3. Формируют и запоминают при подготовке миссии автономного подводного объекта на подводном объекте и поисковом судне излучаемые в процессе гидроакустического поиска сигналы: на автономном подводном объекте - навигационный сигнал маяка-пингера, на поисковом судне - сигналы активации и всплытия автономного донного подводного объекта, имеющие заданную структуру, амплитудные, временные и частотные параметры, по акустическому восприятию приближающиеся к возможным фоновым шумам известной акватории поиска, при этом сигналы активации и всплытия поискового судна состоят из двух составляющих: стартовой посылки и посылки опознавания, а навигационный сигнал маяка-пингера автономного донного подводного объекта содержит четыре составляющие: стартовую посылку, посылку опознавания, навигационную посылку в виде гармонического сигнала известной на поисковом судне частоты и маскирующий навигационную посылку квазибелый шум, частотные параметры которого обеспечивают необходимую точность определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, кроме этого, структура и параметры излучаемого навигационного сигнала маяка-пингера автономного донного подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов активации и всплытия поискового судна априорно известны на автономном донном подводном объекте.
4. Выполняют перед поиском процедуру калибровки парциальных трактов приема навигационного сигнала поискового судна с получением и запоминанием калибровочных поправок.
5. Излучают, по мере продвижения поискового судна по акватории поиска, его передающей антенной в водную среду пространства нижней полусферы, относительно поискового судна, повторяющийся гидроакустический сигнал активации автономного донного подводного объекта, превышающий фоновые шумы водной среды акватории поиска.
6. Принимают посредством приемной антенны и осуществляют необходимую обработку на автономном донном подводном объекте гидроакустического сигнала активации поискового судна.
7. Переводят оборудование автономного донного подводного объекта, по факту достоверного приема сигнала активации, из спящего в рабочий режим.
8. Излучают передающей антенной автономного донного подводного объекта в водную среду акватории поиска, в направлениях верхней полусферы, относительно морского дна, гидроакустический навигационный сигнал, превышающий фоновые шумы водной среды, сформированный маяком-пингером и повторяющийся с интервалом большим его длительности.
9. Принимают пеленгационной антенной поискового судна навигационный сигнал маяка-пингера и подвергают соответствующей обработке, с последующим прекращением, по факту его достоверного приема, излучения передающей антенной поискового судна гидроакустического сигнала активации автономного донного подводного объекта.
10. Измеряют и запоминают глубину водной акватории поиска эхолотом поискового судна.
11. Осуществляют, в процессе поиска, на поисковом судне процедуру определения и запоминания угловых координат автономного донного подводного объекта относительно поискового судна, согласованную с геометрическими параметрами пеленгационной антенны и позволяющую позиционировать автономный донный подводный объект относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/маскирующий шум навигационной посылки маяка-пингера.
12. Оценивают и запоминают по определенному углу места и измеренной глубине водной акватории поиска приближенные значения дальности и наклонного расстояния до автономного донного подводного объекта с использованием соответствующих тригонометрических соотношений.
13. Корректируют курс движения поискового судна на основании обновляемых параметров местоположения автономного донного подводного объекта относительно поискового судна, по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта.
14. Излучают передающей антенной поискового судна в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, в паузе между излучениями навигационного сигнала маяка-пингера автономного донного подводного объекта, гидроакустический сигнал всплытия автономного донного подводного объекта, превышающий фоновые шумы водной среды.
15. Принимают на автономном донном подводном объекте посредством приемной антенны, с осуществлением необходимой обработки, гидроакустический сигнал всплытия.
16. Прекращают, по факту достоверного приема сигнала всплытия, излучение передающей антенной автономного донного подводного объекта навигационного сигнала маяка-пингера.
17. Запускают соответствующие исполнительные механизмы системы изменения плавучести автономного донного подводного объекта.
18. Если после первого излучения поисковым судном сигнала всплытия прием навигационных сигналов маяка-пингера автономного донного подводного объекта на поисковом судне не прекращается, то осуществляют повторное излучение сигнала всплытия.
В качестве необходимых составляющих сигналов активации и всплытия поискового судна, навигационного сигнала маяка-пингера автономного донного подводного объекта используют фрагменты сонограмм записей звуков морских животных, рыб, ракообразных и шумов мелкого или глубокого моря с заданными амплитудными, временными и частотными параметрами. При этом используемые фрагменты обладают ярко выраженным импульсным характером с хорошо различимой структурой для достоверного импульсного приема, а фрагменты сонограмм записей шумов мелкого или глубокого моря, выбираемые в зависимости от глубины известной акватории поиска автономного подводного объекта и имеющие схожие с квазибелым шумом статистические характеристики, служат основой для формирования шума, маскирующего гармоническую навигационную посылку маяка-пингера автономного донного подводного объекта.
Частотные параметры квазибелого шума, маскирующего навигационную посылку маяка-пингера автономного донного подводного объекта, определяют, исходя из необходимой точности оценки угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, обеспечивая превышение нижней граничной частоты его спектра над частотой гармонических колебаний навигационной посылки не менее пяти раз, а верхнюю граничную частоту спектра квазибелого шума согласовывают с верхней границей полосы пропускания передающего тракта автономного донного подводного объекта.
В процессе гидроакустического поиска автономного донного подводного объекта в пределах акватории поиска возможно появление различных надводных судов, проходящих мимо поискового судна на различных расстояниях и создающих помехи приему навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне, возникающие за счет отражения шумовых гидроакустических сигналов надводных судов от морского дна.
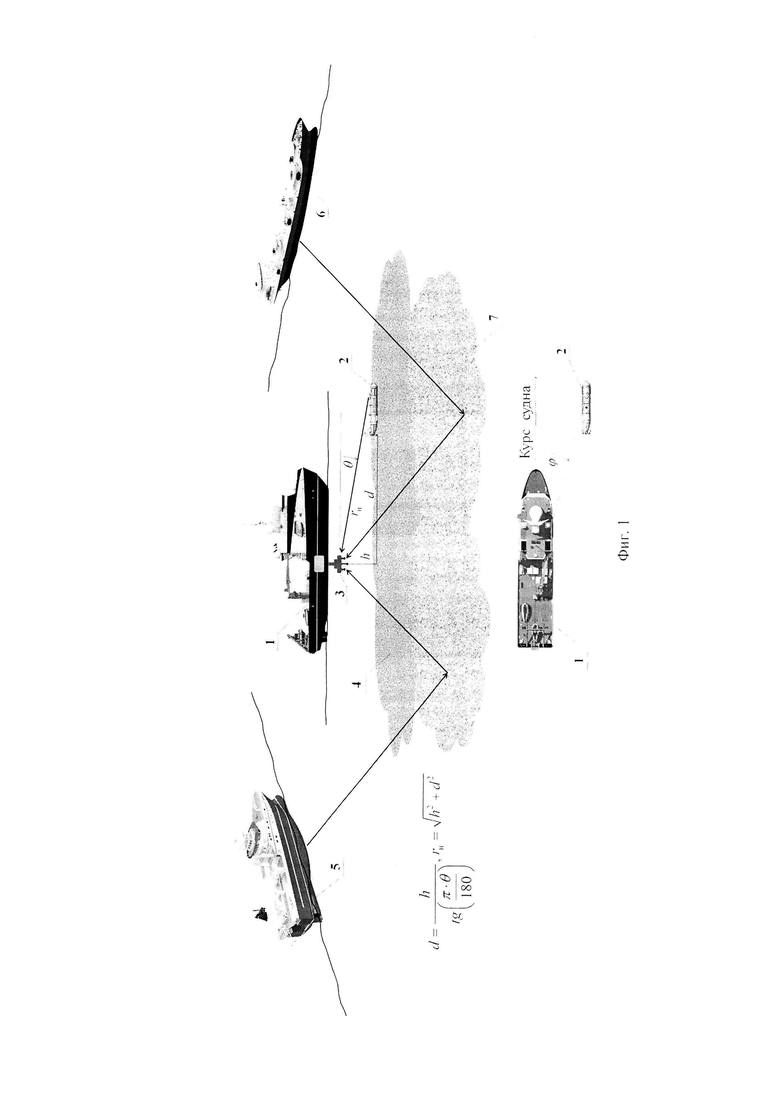
На фиг. 1 представлен пример возникновения двух помех от проходящих надводных судов при гидроакустическом поиске автономного необитаемого подводного аппарата, где обозначены: 1 - надводное поисковое судно; 2 - автономный необитаемый подводный аппарат; 3 - пеленгационная антенна поискового судна; 4 - илистое морское дно; 5, 6 - проходящие надводные суда; 7 - скальные фрагменты морского дна; ϕ, θ - пеленг и угол места автономного необитаемого подводного аппарата в системе координат пеленгационной антенны поискового судна; d - дальность автономного необитаемого подводного аппарата; h - глубина погружения необитаемого подводного аппарата; rн - наклонное расстояние от поискового судна до необитаемого подводного аппарата.
Представленный пример возможного отражения от скальных фрагментов морского дна мешающих гидроакустических сигналов проходящих судов соответствует появлению при обработке на поисковом судне сигнала маяка-пингера автономного необитаемого подводного аппарата двух помех, источники которых (места отражения от скальных фрагментов морского дна) имеют углы места (в системе координат пеленгационной антенны поискового судна), превышающие угол места позиционируемого автономного необитаемого подводного аппарата.
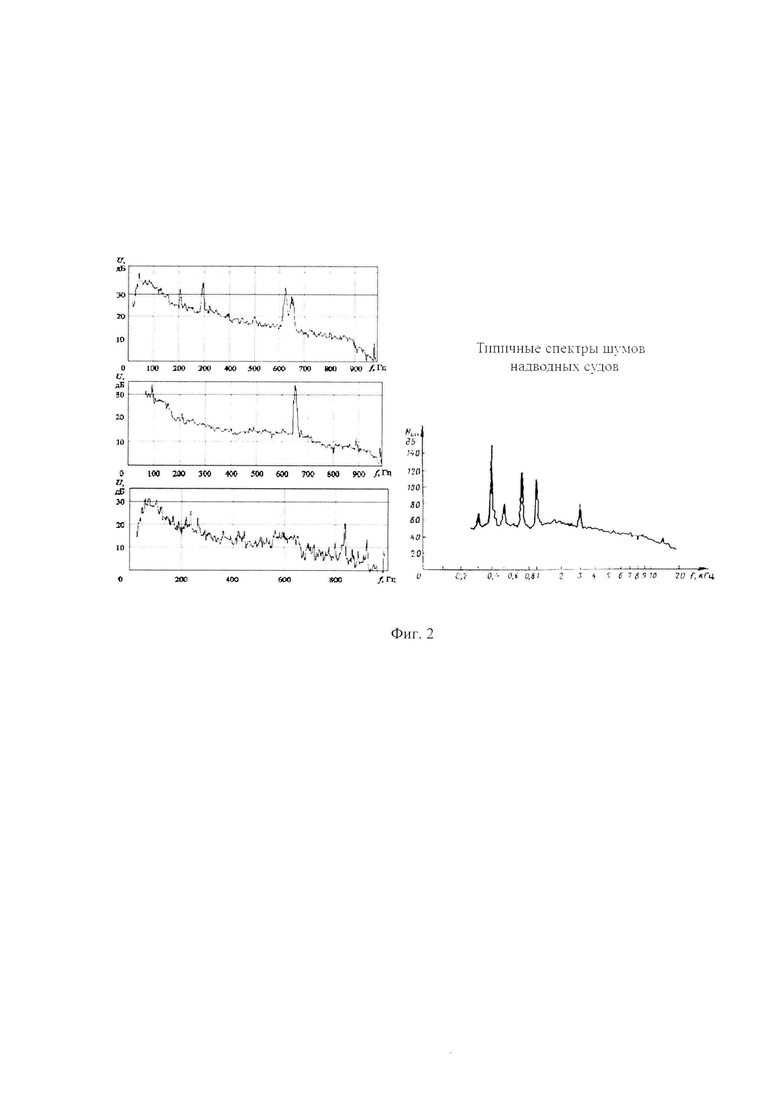
Военные корабли и гражданские суда, курсирующие в различных акваториях мирового океана, являются весьма сильными источниками помех в процессе рассматриваемого гидроакустического поиска автономных подводных объектов. Создаваемые этими объектами шумы, условно можно разделить на три группы: шумы машин и вспомогательных механизмов, шумы, связанные с работой гребных винтов, и гидродинамические шумы.
На фиг. 2 показаны наиболее типичные спектры шумов различных надводных судов, взятые из источников [5].
Шумовые помехи надводных судов, согласно имеющейся статистике, можно отнести к категории сосредоточенных (узкополосных) помех с частотными спектрами, расположенными в относительно низкочастотной (с точки зрения дальности распространения акустических колебаний) области частот (от десятков герц до одного килогерца), вследствие чего уровни таких помех в местах возможного приема навигационных сигналов при поиске подводных объектов могут превышать уровень флуктуационных шумов морской среды на 80-100 дБ.
При математической оценке эффективности подавления сосредоточенных помех в различных радиотехнических системах используется модель помехи в виде узкополосного случайного процесса с изменяющимися амплитудой и фазой колебаний заданной средней частоты ее энергетического спектра [6].
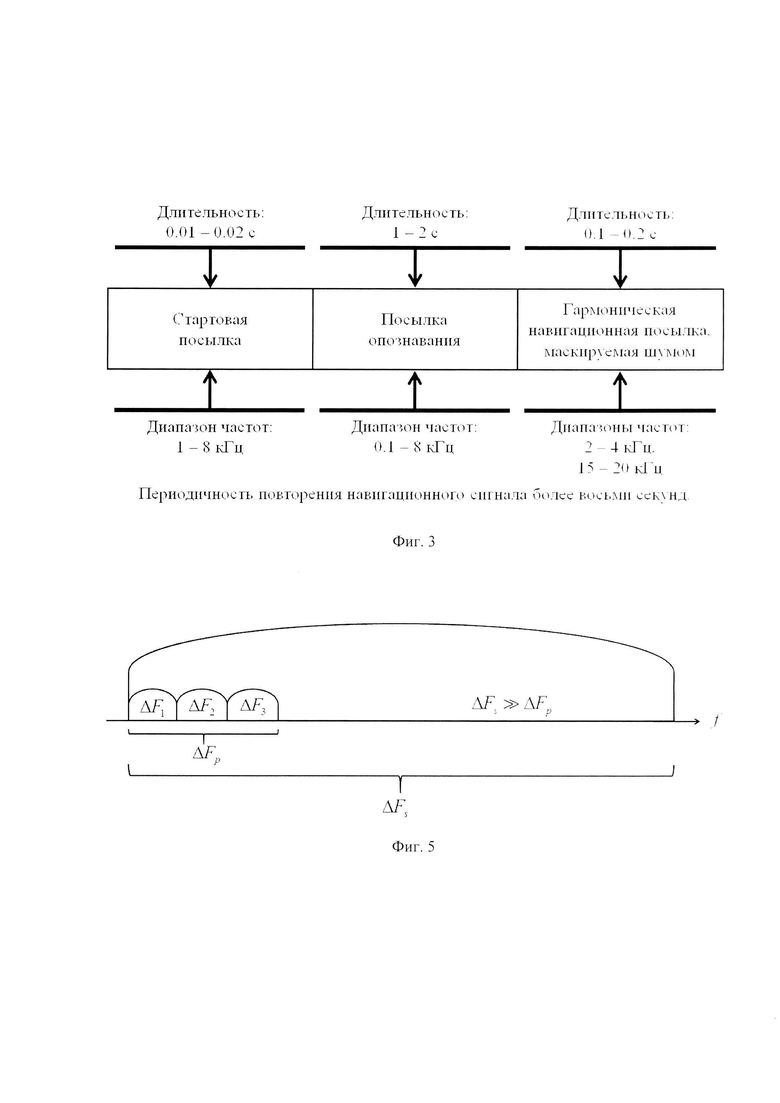
Рекомендуемые в способе-прототипе [4] частотно-временные параметры навигационного сигнала, излучаемого маяком-пингером автономного донного подводного объекта, представленные на фиг. 3, позволяют сделать два важных системных вывода:
- навигационный сигнал общей длительностью не более 2.22 секунд излучается в процессе гидроакустического поиска с периодичностью не менее 8 секунд, то есть обладает большой скважностью с временным интервалом, на котором могут присутствовать только помехи - флуктуационные шумы морской среды и сосредоточенные помехи ближнего и дальнего судоходства, но отсутствует навигационный сигнал маяка-пингера автономного донного подводного объекта;
- частотные спектры сосредоточенных помех ближнего и дальнего судоходства находятся в диапазоне частот посылки опознавания навигационного сигнала маяка-пингера, что не позволяет подавить на приеме помехи судоходства путем обычной частотной фильтрации и осуществить достоверный прием на поисковом судне посылки опознавания навигационного сигнала маяка-пингера с последующей обработкой навигационной посылки в процессе поиска автономного донного подводного объекта.
Техническим результатом заявляемого способа является осуществление скрытного гидроакустического поиска с надводного поискового судна автономного донного подводного объекта в условиях воздействия сосредоточенных помех ближнего и дальнего судоходства, реализованного за счет видоизменения структуры обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне.
Данный технический результат достигается за счет того, что в способе скрытного гидроакустического поиска с надводного поискового судна автономного донного подводного объекта, находящегося в спящем режиме на дне известной морской акватории после выполнения соответствующей миссии, заключающемся в оборудовании поискового судна согласованной с его курсом пеленгационной антенной диаметрально-ортогональной геометрии расположения четырех приемных гидрофонов, слабонаправленной передающей гидроакустической антенной, аппаратурой приема и обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на базе высокостабильного опорного генератора, аппаратурой формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустическим эхолотом для измерения глубины акватории поиска со структурой зондирующих импульсов, позволяющей обеспечить акустическое восприятие процедуры измерения глубины водной акватории поиска, приближающееся к возможному гибридному шумовому фону морской среды, в оснащении автономного донного подводного объекта системой изменения плавучести, слабонаправленными приемной и передающей гидроакустическими антеннами, аппаратурой приема и обработки сигналов активации и всплытия поискового судна, маяком-пингером, формирующим, с использованием высокостабильного опорного генератора, повторяющийся навигационный сигнал, в формировании и запоминании при подготовке миссии автономного подводного объекта на подводном объекте и поисковом судне излучаемых в процессе гидроакустического поиска сигналов: на автономном подводном объекте - навигационного сигнала маяка-пингера, на поисковом судне - сигналов активации и всплытия автономного донного подводного объекта, имеющих заданную структуру, амплитудные, временные и частотные параметры, по акустическому восприятию приближающихся к возможным фоновым шумам известной акватории поиска, при этом сигналы активации и всплытия поискового судна состоят из двух составляющих: стартовой посылки и посылки опознавания, а навигационный сигнал маяка-пингера автономного донного подводного объекта содержит четыре составляющие: стартовую посылку, посылку опознавания, навигационную посылку в виде гармонического сигнала известной на поисковом судне частоты и маскирующий навигационную посылку квазибелый шум, частотные параметры которого обеспечивают необходимую точность определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, кроме этого, структура и параметры излучаемого навигационного сигнала маяка-пингера автономного донного подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов активации и всплытия поискового судна априорно известны на автономном донном подводном объекте, в выполнении перед поиском процедуры калибровки парциальных трактов приема навигационного сигнала поискового судна с получением и запоминанием калибровочных поправок, в повторяющемся, по мере продвижения поискового судна по акватории поиска, излучении его передающей антенной в водную среду пространства нижней полусферы, относительно поискового судна, гидроакустического сигнала активации автономного донного подводного объекта, превышающего фоновые шумы водной среды акватории поиска, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала активации поискового судна, в переводе оборудования автономного донного подводного объекта, по факту достоверного приема сигнала активации, из спящего в рабочий режим, в излучении передающей антенной автономного донного подводного объекта в водную среду акватории поиска, в направлениях верхней полусферы, относительно морского дна, гидроакустического навигационного сигнала, превышающего фоновые шумы водной среды, сформированного маяком-пингером и повторяющегося с интервалом большим его длительности, в приеме пеленгационной антенной поискового судна навигационного сигнала маяка-пингера и его соответствующей обработке, с последующим прекращением, по факту его достоверного приема, излучения передающей антенной поискового судна гидроакустического сигнала активации автономного донного подводного объекта, в измерении и запоминании глубины водной акватории поиска эхолотом поискового судна, в осуществлении, в процессе поиска, на поисковом судне процедуры определения и запоминания угловых координат автономного донного подводного объекта относительно поискового судна, согласованной с геометрическими параметрами пеленгационной антенны и позволяющей позиционировать автономный донный подводный объект относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/маскирующий шум навигационной посылки маяка-пингера, в оценке и запоминании по определенному углу места и измеренной глубине водной акватории поиска приближенных значений дальности и наклонного расстояния до автономного донного подводного объекта с использованием соответствующих тригонометрических соотношений, в корректировке курса движения поискового судна на основании обновляемых параметров местоположения автономного донного подводного объекта относительно поискового судна, по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта, в излучении передающей антенной поискового судна в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, в паузе между излучениями навигационного сигнала маяка-пингера автономного донного подводного объекта, гидроакустического сигнала всплытия автономного донного подводного объекта, превышающего фоновые шумы водной среды, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала всплытия, в прекращении, по факту достоверного приема сигнала всплытия, излучения передающей антенной автономного донного подводного объекта навигационного сигнала маяка-пингера, в запуске соответствующих исполнительных механизмов системы изменения плавучести автономного донного подводного объекта, видоизменяют структуру обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне: разделяют возможный частотный диапазон сосредоточенных помех мешающего судоходства на три поддиапазона - по максимальному количеству помех, которые можно подавить с использованием четырехэлементной пеленгационной антенны, организуют из четырех парциальных трактов приема пеленгационной антенны четыре группы каналов обработки сигналов, из четырех каналов приема в каждой группе, по принципу «три для одного» - для подавления сосредоточенных помех в одном, основном, канале приема группы используют три соответствующих вспомогательных канала приема, осуществляют в каждой группе каналов обработки сигналов, во время отсутствия излучения кратковременно повторяющегося в процессе гидроакустического поиска сигнала маяка-пингера, когерентную компенсацию колебаний сосредоточенных помех основного канала приема взвешенными колебаниями сосредоточенных помех вспомогательных каналов приема с использованием операции адаптивного комплексного взвешивания, при этом сигналы каждого вспомогательного канала приема подвергают частотной фильтрации в соответствующем поддиапазоне возможного частотного диапазона сосредоточенных помех мешающего судоходства, затем выполняют линейное амплитудное детектирование и последетекторное сложение сигналов парциальных трактов приема пеленгационной антенны, осуществляют, с появлением излучения маяка-пингера, последетекторный прием стартовой посылки навигационного сигнала, после чего на известное время, соответствующее суммарной длительности посылки опознавания и навигационной посылки маяка-пингера, приостанавливают операцию адаптивного комплексного взвешивания с сохранением ранее полученных коэффициентов комплексного взвешивания, выполняют прием посылки опознавания сигнала маяка-пингера, реализуют, после вынесения решения о достоверном приеме посылки опознавания сигнала маяка-пингера, процедуру определения угловых координат автономного донного подводного объекта относительно поискового судна с предварительной полосовой фильтрацией сигнала маяка-пингера в полосе частот его замаскированной шумом навигационной посылки и подавлением вне полосы фильтрации сосредоточенных помех судоходства.
Существенными отличиями заявляемого способа являются использование при обработке на поисковом судне навигационного сигнала маяка-пингера автономного донного подводного объекта адаптивной когерентной компенсации сосредоточенных помех мешающего судоходства в парциальных трактах приема пеленгационной антенны, выполняемой в паузах между интервалами излучения навигационного сигнала с подводного объекта, с частотным разделением помех от разных надводных источников в трех выбранных поддиапазонах частот и приостановкой когерентной компенсации на время приема навигационного сигнала маяка-пингера, осуществление после когерентной компенсации линейного амплитудного детектирования и последетекторного сложения сигналов парциальных трактов приема пеленгационной антенны, что в совокупности позволяет осуществлять скрытный гидроакустический поиск автономного донного подводного объекта в условиях воздействия сосредоточенных помех ближнего и дальнего судоходства.
Совокупность существенных признаков заявляемого способа имеет причинно-следственную связь с достигаемым техническим результатом, из чего можно заключить, что данное техническое решение является новым, обладает изобретательским уровнем, так как явным образом не следует из существующего уровня техники, и пригодно для практического применения.
Предлагаемое изобретение поясняется чертежами.
На фиг. 1 представлен пример возникновения двух помех от проходящих надводных судов при гидроакустическом поиске автономного необитаемого донного подводного аппарата.
На фиг. 2 показаны наиболее типичные спектры шумов различных надводных судов.
На фиг. 3 изображена частотно-временная структура навигационного сигнала маяка-пингера автономного донного подводного объекта.
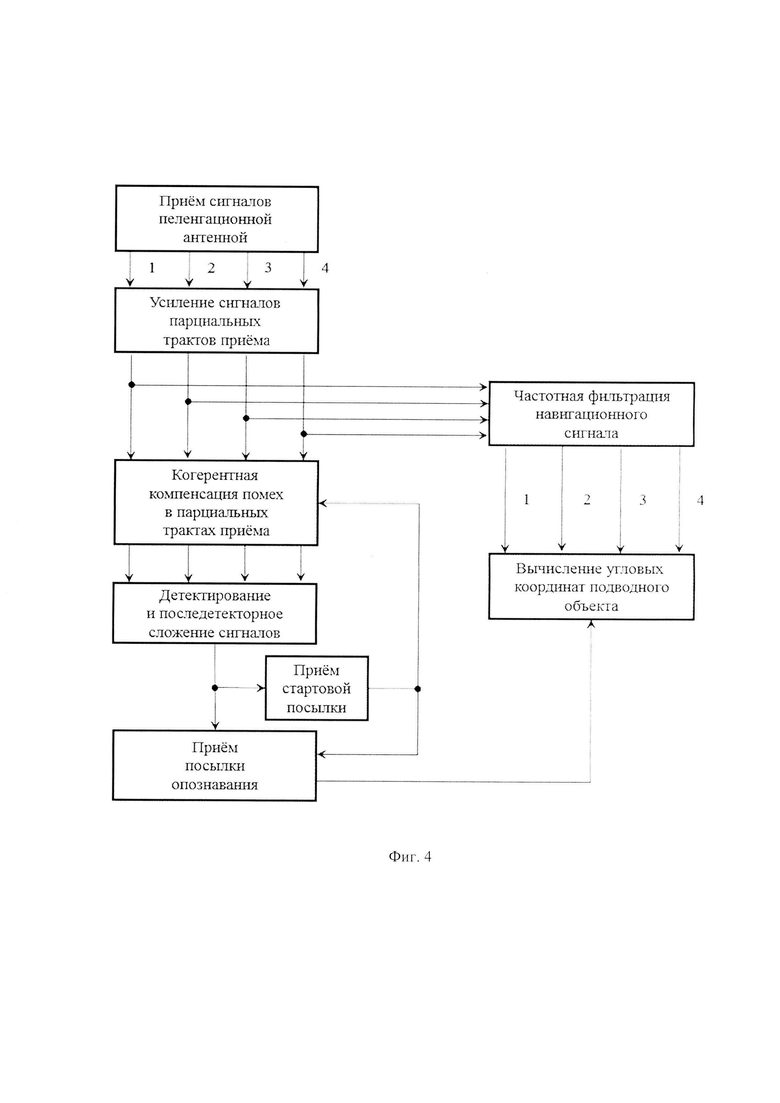
Фиг. 4 поясняет структуру обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне в процессе гидроакустического поиска.
Фиг. 5 отображает соотношение диапазонов частот посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта и возможного диапазона частот сосредоточенных помех мешающего судоходства.
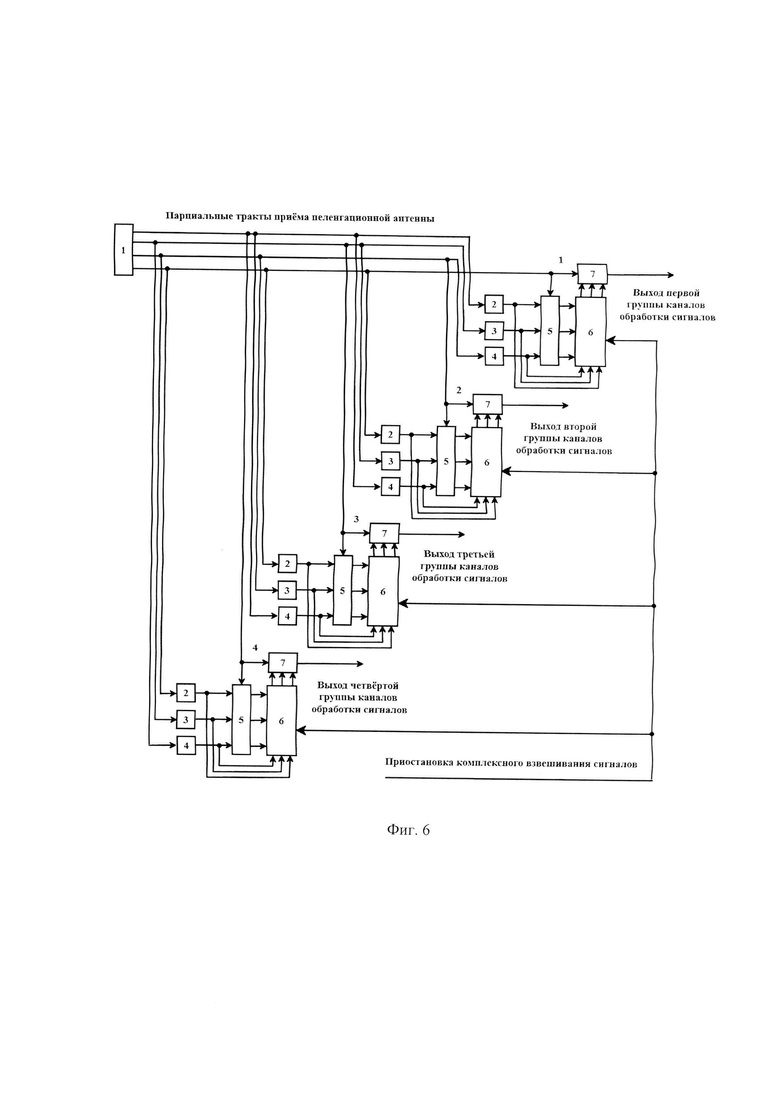
На фиг. 6 представлены укрупненные функциональные операции когерентной компенсации сосредоточенных помех мешающего судоходства в парциальных трактах приема пеленгационной антенны поискового судна.
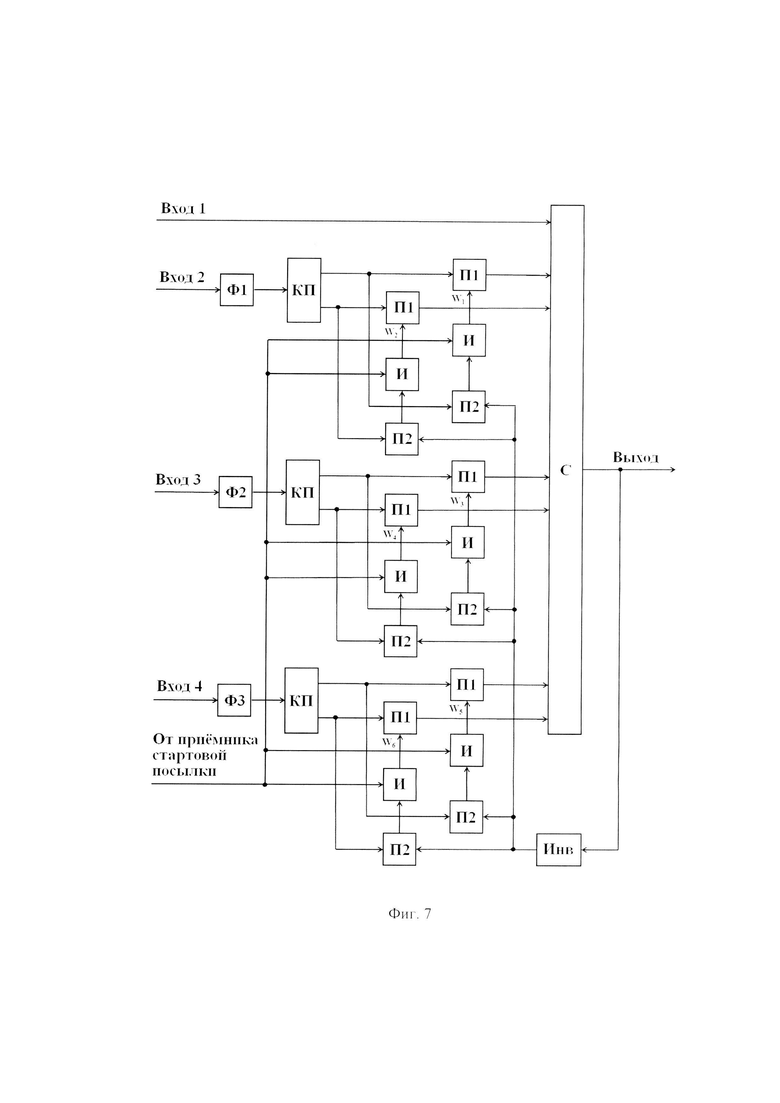
На фиг. 7 показан пример технической реализации группы каналов обработки сигналов для осуществления адаптивной когерентной компенсации сосредоточенных помех мешающего судоходства в каждом парциальном тракте приема пеленгационной антенны поискового судна.
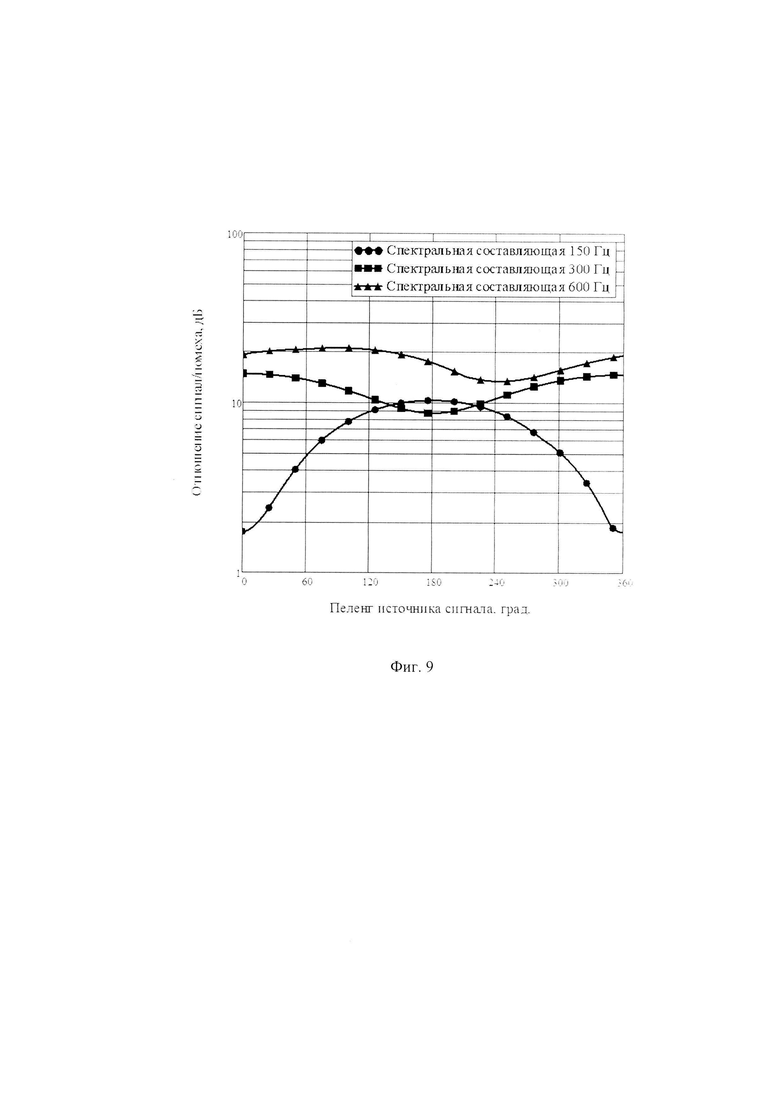
На фиг. 8 и фиг. 9 представлены результаты моделирования, по оценке энергетической эффективности когерентной компенсации трех сосредоточенных помех мешающего судоходства на поисковом судне.
Порядок действий общего процесса скрытного гидроакустического поиска автономного донного подводного объекта заявляемого способа аналогичен порядку действий способа-прототипа, отличия проявляются в действиях частного процесса - обработке навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне.
Обработка навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне в процессе скрытного гидроакустического поиска предполагает выполнение следующего порядка действий, процедур и операций, которые для наглядности восприятия представлены в виде графической структуры на фиг. 4.
1. Принимают гидроакустические сигналы водной среды акватории поиска пеленгационной антенной диаметрально-ортогональной геометрии расположения четырех приемных гидрофонов. Такими сигналами являются продолжительные по времени флуктуационные шумы морской среды, сосредоточенные помехи мешающего судоходства и кратковременный навигационный сигнал маяка-пингера автономного донного подводного объекта.
2. Усиливают принятые гидрофонами пеленгационной антенны сигналы парциальных трактов приема до уровня, необходимого для их дальнейшей обработки.
3. Осуществляют адаптивную когерентную компенсацию [7] сосредоточенных помех мешающего судоходства в парциальных трактах приема пеленгационной антенны с выполнением следующих действий и операций.
3.1. Разделяют возможный частотный диапазон сосредоточенных помех мешающего судоходства на три поддиапазона - по максимальному количеству помех, которые можно подавить с использованием четырехэлементной пеленгационной антенны, для частотной фильтрации помех разных надводных источников, рассредоточенных по акватории поиска, спектры частот которых попадают в соответствующие поддиапазоны возможного частотного диапазона сосредоточенных помех мешающего судоходства.
На фиг. 5 схематично показано соотношение диапазонов частот широкополосной посылки опознавания маяка-пингера автономного донного подводного объекта и узкополосных помех мешающего судоходства, где обозначены: ΔFs - диапазон частот посылки опознавания маяка-пингера автономного донного подводного объекта; ΔFp - возможный диапазон частот сосредоточенных помех мешающего судоходства; ΔF1, ΔF2, ΔF3 - выбранные для частотной фильтрации поддиапазоны частот сосредоточенных помех мешающего судоходства.
В соответствии с частотными параметрами навигационного сигнала, излучаемого маяком-пингером автономного донного подводного объекта, и типичными спектрами шумов надводных судов, представленными на фиг. 3 и фиг. 2, а также предпочтительной схемотехнической реализацией октавных полосовых фильтров низкочастотного диапазона, возможен выбор следующих величин диапазона частот посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта и поддиапазонов частот сосредоточенных помех мешающего судоходства: ΔFs=0.1…8 кГц (полоса частот 7.9 кГц), ΔF1=0.1…0.2 кГц (полоса частот 100 Гц), ΔF2=0.2…0.4 кГц (полоса частот 200 Гц), ΔF3=0.4…0.8 кГц (полоса частот 400 Гц).
3.2. Организуют из четырех парциальных трактов приема пеленгационной антенны четыре группы каналов обработки сигналов, из четырех каналов приема в каждой группе, по принципу «три для одного» - для подавления сосредоточенных помех в одном, основном, канале приема группы используют три соответствующих вспомогательных канала приема.
3.3. Осуществляют в каждой группе каналов обработки сигналов, во время отсутствия излучения кратковременно повторяющегося в процессе гидроакустического поиска навигационного сигнала маяка-пингера автономного донного подводного объекта, когерентную компенсацию колебаний сосредоточенных помех основного канала приема взвешенными колебаниями сосредоточенных помех вспомогательных каналов приема с использованием операции адаптивного комплексного взвешивания, при этом сигналы каждого вспомогательного канала приема подвергают частотной фильтрации в соответствующем поддиапазоне возможного частотного диапазона сосредоточенных помех мешающего судоходства.
Когерентная компенсация сосредоточенных помех в парциальных трактах приема пеленгационной антенны с группировкой по принципу «три для одного» может быть представлена укрупненными функциональными операциями, показанными на фиг. 6, где обозначены: 1 - усиление сигналов парциальных трактов приема пеленгационной антенны, 2 - частотная фильтрация колебаний помех в поддиапазоне частот ΔF1, 3 - частотная фильтрация колебаний помех в поддиапазоне частот ΔF2, 4 - частотная фильтрация колебаний помех в поддиапазоне частот ΔF3, 5 - формирование коэффициентов комплексного взвешивания для когерентной компенсации колебаний помех в соответствующем парциальном тракте приема, 6 - комплексное взвешивание колебаний помех соответствующих парциальных трактов приема трех частотных поддиапазонов, 7 - вычитание из колебаний помех соответствующего парциального тракта приема взвешенных колебаний помех трех частотных поддиапазонов возможного частотного диапазона сосредоточенных помех мешающего судоходства.
Пример технической реализации группы каналов обработки сигналов для осуществления адаптивной когерентной компенсации сосредоточенных помех мешающего судоходства в каждом парциальном тракте приема пеленгационной антенны поискового судна показан на фиг. 7, где обозначены: Ф1, Ф2, Ф3 - полосовые частотные фильтры с полосами частот ΔF1, ΔF2, ΔF3 соответственно; КП - квадратурные преобразователи сигналов; П1 - умножители сигналов; П2 - умножители сигналов с предельным ограничением умножаемых сигналов; И - управляемые интеграторы; С - сумматор сигналов; Инв - инвертор сигналов.
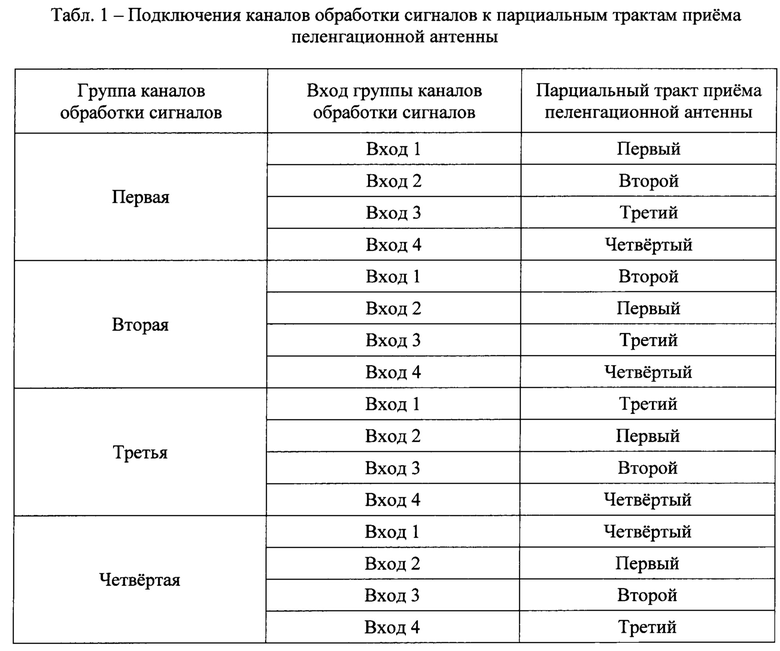
Представленная на фиг. 7 структура функциональных связей элементов группы каналов обработки сигналов реализует адаптивную когерентную компенсацию сигналов, поступающих на Вход 1, взвешенными сигналами, поступающими на Входы 2, 3, 4, по методу наискорейшего градиентного спуска [7] с формированием соответствующих коэффициентов W1…W6 комплексного взвешивания. Для осуществления адаптивной когерентной компенсации сосредоточенных помех в трактах приема пеленгационной антенны поискового судна организуют подключения Входов 1-4 каждой из четырех групп каналов обработки сигналов к соответствующим трактам приема пеленгационной антенны. Порядок подключений приведен в табл. 1.
4. Выполняют, после когерентной компенсации сосредоточенных помех мешающего судоходства, линейное амплитудное детектирование и последетекторное сложение сигналов парциальных трактов приема пеленгационной антенны с целью обеспечения достаточного для достоверного приема посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта отношения сигнал/шум.
5. Осуществляют, с появлением излучения маяка-пингера автономного донного подводного объекта, последетекторный прием и обработку стартовой посылки навигационного сигнала.
6. Приостанавливают, после приема и обработки стартовой посылки навигационного сигнала (см. функциональную операцию на фиг. 6 и сигнал от приемника стартовой посылки на фиг. 7), на известное время, соответствующее суммарной длительности посылки опознавания и навигационной посылки маяка-пингера, операцию адаптивного комплексного взвешивания с сохранением ранее полученных коэффициентов комплексного взвешивания, что позволяет избежать подавления, в результате когерентной компенсации, принимаемой посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта.
7. Выполняют прием и обработку посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта.
8. Реализуют, после вынесения решения о достоверном приеме посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта, процедуру определения угловых координат автономного донного подводного объекта относительно поискового судна с предварительной полосовой фильтрацией сигнала маяка-пингера в полосе частот его замаскированной шумом навигационной посылки и подавлением вне полосы фильтрации сосредоточенных помех судоходства.
Принцип приема стартовой посылки и посылки опознавания навигационного сигнала маяка-пингера автономного донного подводного объекта, функциональный состав и техническая реализация необходимого для этого оборудования аналогичны алгоритмическим и аппаратным атрибутам, используемым в способе-прототипе.
Возможная техническая реализация оборудования поискового судна и автономного донного подводного объекта заявляемого способа совпадает с техническим исполнением оборудования указанных объектов способа-прототипа.
Примеры возможной схемотехнической реализации функциональных элементов группы каналов обработки сигналов при когерентной компенсации сосредоточенных помех мешающего судоходства в парциальных трактах приема пеленгационной антенны поискового судна представлены в табл. 2.
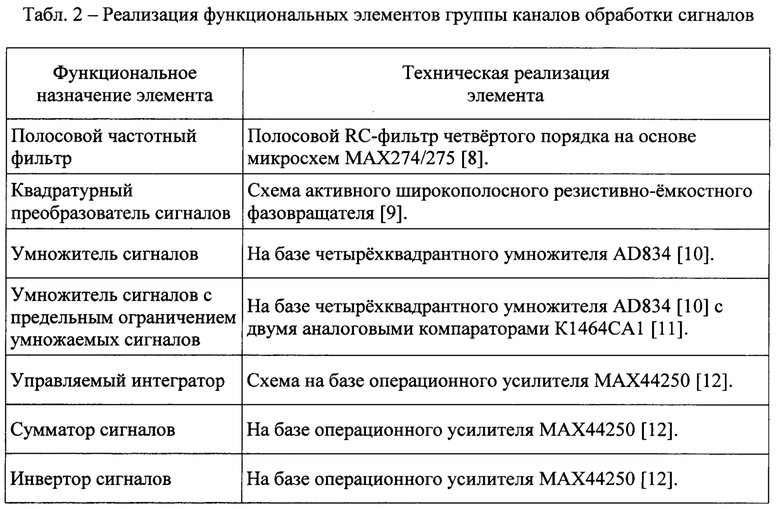
Схемотехническое исполнение полосовых фильтров для частотной фильтрации сигнала маяка-пингера в парциальных трактах приема пеленгационной антенны в полосе частот его замаскированной шумом навигационной посылки аналогично исполнению полосовых фильтров [8] для фильтрации помех трех частотных поддиапазонов возможного частотного диапазона сосредоточенных помех мешающего судоходства.
Подавление помех мешающего судоходства базируется на принципе пространственно-временной обработки [13] навигационного сигнала маяка-пингера автономного донного подводного объекта с адаптивной когерентной компенсацией сосредоточенных помех в парциальных трактах приема пеленгационной антенны поискового судна, использующем пространственные, временные и частотные различия навигационного сигнала и мешающих помех.
Оценим энергетическую эффективность пространственно-временной обработки для случая когерентной компенсации трех сосредоточенных помех мешающего судоходства, характеризующего наихудший сценарий скрытного гидроакустического поиска автономного донного подводного объекта с поискового судна.
Прежде чем перейти к количественной оценке параметров энергетической эффективности необходимо заметить, что когерентная компенсация помех мешающего судоходства ориентирована на подавление узкополосных помех мешающего судоходства с обеспечением требуемого достоверного приема широкополосного импульсного сигнала посылки опознавания маяка-пингера автономного необитаемого донного подводного объекта.
Поэтому коэффициенты комплексного взвешивания колебаний парциальных трактов приема пеленгационной антенны поискового судна, сформированные при когерентной компенсации узкополосных помех мешающего судоходства, позволяют, с одной стороны, выполнить их эффективное подавление, но, с другой стороны, приводят к искажениям формы широкополосного сигнала посылки опознавания маяка-пингера, вследствие изменения уровней его спектральных составляющих, что может привести к снижению достоверности последующего приема.
В этой связи с целью приближенной оценки допустимых искажений формы широкополосного сигнала посылки опознавания маяка-пингера в парциальных трактах приема пеленгационной антенны (после когерентной компенсации помех) параметры энергетической эффективности пространственно-временной обработки будем определять на нескольких частотах его спектра.
При математическом описании операций когерентной компенсации узкополосных помех возникает закономерный вопрос выбора формы представления помех мешающего судоходства (далее помех) и сигнала посылки опознавания маяка-пингера автономного донного подводного объекта (далее сигнала), который необходимо достоверно принимать на поисковом судне в условиях воздействия указанных помех и флуктуационного шума морской среды.
Форма представления сигнала и помех должна способствовать уменьшению громоздкости используемых математических преобразований, с целью исключения возможных ошибок при вычислениях, в необходимой мере отражать параметры реальных сигналов и помех, имеющих место в процессе гидроакустического поиска с надводного судна автономного донного подводного объекта, и не приводить к недопустимому искажению конечных результатов из-за введенных математических допущений.
С учетом необходимой корректности математических преобразований и физических особенностей используемого гидроакустического канала связи введем следующие допущения:
- сигнал и помехи в четырех парциальных трактах приема пеленгационной антенны представляются комплексными числами в показательной форме, при этом модуль комплексного числа интерпретируется как амплитуда действительного сигнала, а мнимый аргумент (угол наклона вектора относительно действительной оси на комплексной плоскости) - как его фаза, из формы представления исключаются две составляющие - частота и время;
- уровни принимаемых сигнала, помех и флуктуационного шума морской среды в каждом парциальном тракте приема пеленгационной антенны принимаются соответственно одинаковыми, это обусловлено малым пространственным разнесением приемных гидрофонов пеленгационной антенны;
- флуктуационные шумы морской среды в парциальных трактах приема пеленгационной антенны считаются некоррелированными, этот физический аспект образования шумов морской среды, для используемого в заявляемом способе диапазона частот, подтвержден экспериментальными исследованиями;
- корреляционные связи между сигналом и помехами в парциальных трактах приема пеленгационной антенны отсутствуют, вследствие независимости порождающих их источников.
Запишем сигнально-помеховые процессы в первом (основном) парциальном тракте приема пеленгационной антенны поискового судна в следующем, пригодном для дальнейших преобразований, виде

где X1, Y1, Y2, Y3 - амплитуды сигнала и трех помех соответственно; ψ1, ϕ1, ξ1, φ1 - фазы сигнала и трех помех, обусловленные пространственным разнесением источников сигнала и помех, а также гидрофонов пеленгационной антенны поискового судна;  - дисперсия флуктуационного шума морской среды.
- дисперсия флуктуационного шума морской среды.
Сигнально-помеховые процессы во вспомогательных парциальных трактах приема (втором, третьем и четвертом) представим соответственно:

где ΔFs - полоса частот сигнала; X2, X3, X4 - амплитуды сигнала после частотной фильтрации в поддиапазонах частот ΔF1, ΔF2, ΔF3 соответственно; ψ21 - Фаза сигнала второго парциального тракта приема после частотной фильтрации в поддиапазоне частот ΔF1; ψ32 - фаза сигнала третьего парциального тракта приема после частотной фильтрации в поддиапазоне частот ΔF2; ψ43 - фаза сигнала четвертого парциального тракта приема после частотной фильтрации в поддиапазоне частот ΔF3; ϕ2 - фаза первой помехи второго парциального тракта приема после частотной фильтрации в поддиапазоне частот ΔF1; ξ3 - фаза второй помехи третьего парциального тракта приема после частотной фильтрации в поддиапазоне частот ΔF2; φ4 - фаза третьей помехи четвертого парциального тракта приема после частотной фильтрации в поддиапазоне частот.
Диагональная квадратная матрица A корреляционных связей колебаний помех (трех некоррелированных помех мешающего судоходства и флуктуационного шума морской среды) второго, третьего и четвертого парциальных трактов приема пеленгационной антенны имеет вид

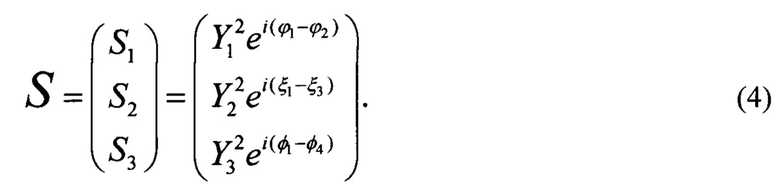
Вектор S корреляционных связей колебаний помех первого и второго, первого и третьего, первого и четвертого парциальных трактов приема пеленгационной антенны запишется соответственно:
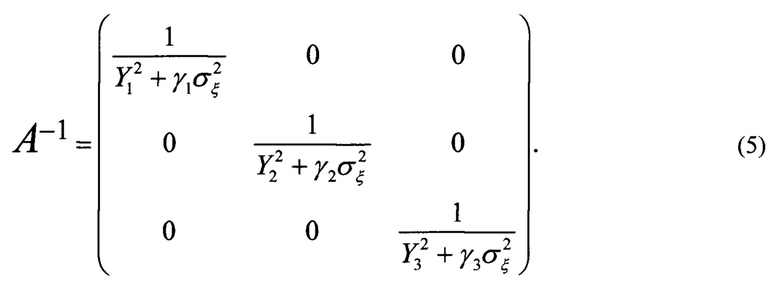
Определяем элементы обратной матрицы A-1 корреляционных связей колебаний помех второго, третьего и четвертого парциальных трактов приема пеленгационной антенны:
Обозначим отношения помеха/флуктуационный шум в парциальных трактах приема пеленгационной антенны:
тогда коэффициенты комплексного взвешивания для когерентной компенсации колебаний помех в основном парциальном тракте приема взвешенными колебаниями помех вспомогательных (второго, третьего и четвертого) парциальных трактов приема, которые формируются в группе каналов обработки сигналов (см. фиг. 7) после завершения процесса адаптации по методу наискорейшего градиентного спуска, находим на основе известного в теории адаптивной обработки сигналов матричного уравнения Винера-Хопфа [13] из соотношений:
которые, с учетом зависимостей (4) и (5), преобразуются к виду
Уровень колебаний помех, для их когерентной компенсации в основном тракте приема, определяется суммой взвешенных колебаний трех вспомогательных трактов приема:

Мощность некомпенсированного остатка помех основного тракта приема пеленгационной антенны в результате выполнения когерентной компенсации составляет:
где  - помехи основного парциального тракта приема; * - знак комплексного сопряжения.
- помехи основного парциального тракта приема; * - знак комплексного сопряжения.
Возросшая, в результате выполнения когерентной компенсации, дисперсия флуктуационного шума морской среды основного парциального тракта приема пеленгационной антенны определяется соотношением:
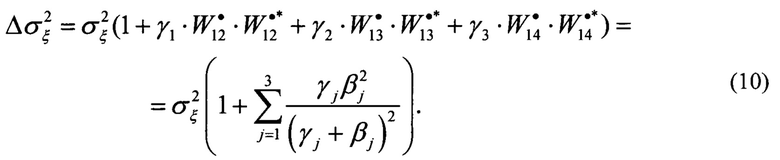
Введем дополнительные обозначения:
где α1, α2, α3, α4 - отношения сигнал/флуктуационный шум в парциальных трактах приема пеленгационной антенны.
При этом отношения сигнал/помеха (ОСП) в каждом из четырех парциальных трактов приема пеленгационной антенны после когерентной компенсации будут описываться следующей зависимостью:
где i=1, 2, 3, 4 - номер парциального тракта приема; Hi [дБ] - коэффициент снижения мощности сигнала в парциальном тракте приема за счет уменьшения амплитуд спектральных составляющих в поддиапазонах частот ΔF1, ΔF2, ΔF3 фильтрации помех после операции вычитания сигналов.
На фиг. 8, в качестве примера, представлены зависимости отношения сигнал/помеха от отношений помеха/флуктуационный шум для разных отношений сигнал/флуктуационный шум при когерентной компенсации трех узкополосных помех, рассчитанные с использованием зависимости (11), при следующих параметрах сигнально-помеховых процессов в парциальных трактах приема пеленгационной антенны: H1=H2=H3=H4=3 дБ; α1=α2=α3=α4=10, 20, 30 дБ; ΔF1=100 Гц; ΔF2=200 Гц; ΔF3=400 Гц; ΔFs=7.9 кГц; β1=β2=β3=1…100 дБ. В этом случае имеем ОСП1=ОСП2=ОСП3=ОСП4.
Как видно из фиг. 8 отношения сигнал/помеха в четырех парциальных трактах приема пеленгационной антенны после когерентной компенсации не зависят от отношений помеха/флуктуационный шум и определяются уменьшенными на величины коэффициентов H1, H2, H3, H4 снижения мощностей сигнала отношениями сигнал/флуктуационный шум.
Для определения величин коэффициентов H1, H2, H3, H4 снижения мощностей сигнала в парциальных трактах приема пеленгационной антенны после когерентной компенсации необходимо знать спектральную плотность сигнала посылки опознавания маяка-пингера автономного донного подводного объекта в диапазоне частот ΔFs, которая будет характеризоваться спектральным составом выбранных для маскирования фрагментов сонограмм записей звуков морской среды.
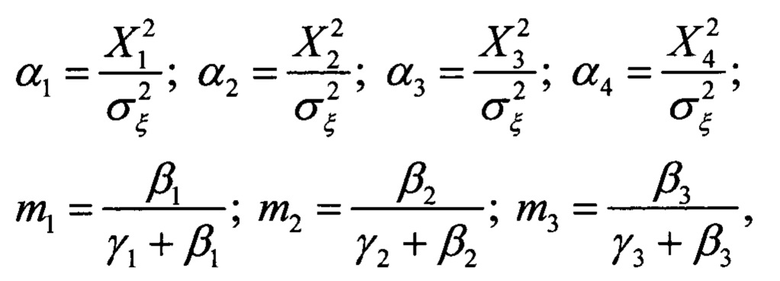
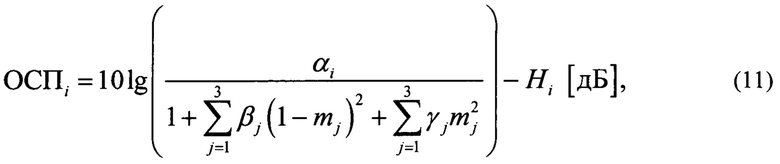
Для количественной оценки возможного снижения мощности спектральных составляющих сигнала в диапазоне частот ΔFp помех судоходства можно использовать аналитические выражения, полученные в рамках используемой математической модели сигнально-помеховых процессов в парциальных трактах приема пеленгационной антенны:
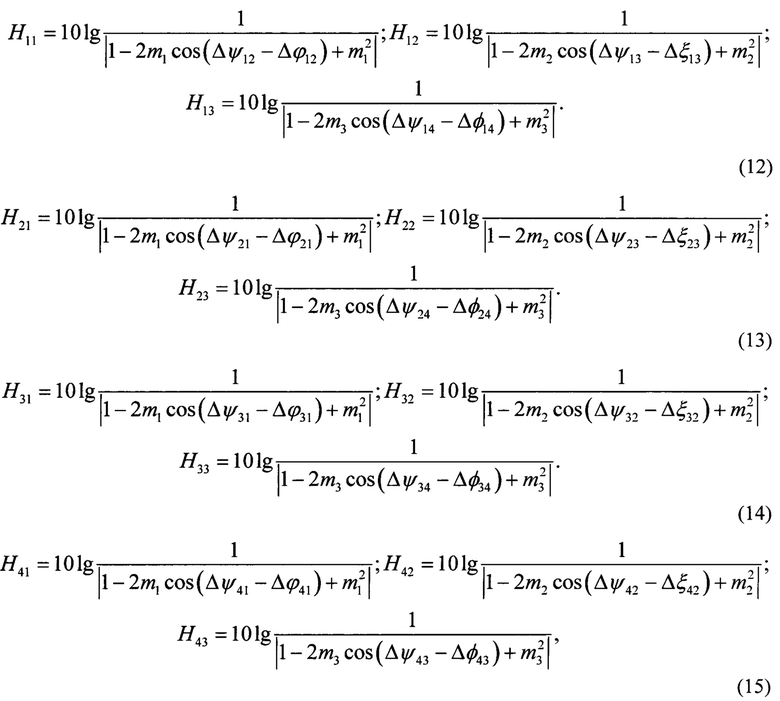
где

Hij (i=1, 2, 3, 4; j=1, 2, 3) - коэффициент снижения мощности сигнала i-го парциального тракта приема в j-м поддиапазоне частот помех судоходства; i - номер парциального тракта приема пеленгационной антенны; j - номер поддиапазона частот помех судоходства.
С целью оценки снижения мощности спектральных составляющих сигнала в парциальных трактах приема, на основе соотношений (12)-(15), выполнены расчеты для следующих характеристик процесса скрытного гидроакустического поиска автономного донного подводного объекта:
- на поисковом судне используется пеленгационная антенна диаметрально-ортогональной геометрии с размерами 0.2 м и 0.1 м в горизонтальной и вертикальной плоскостях соответственно при наклонном расстоянии до автономного донного подводного объекта (источника сигнала) 500 м;
- имеет место воздействие трех узкополосных помех мешающего судоходства с центральными частотами спектров 150, 300 и 600 Гц;
- частоты спектральных составляющих сигнала посылки опознавания маяка-пингера автономного донного подводного объекта приняты равными центральным частотам спектров помех;
- пеленги источников помех (мешающих надводных судов) относительно курса поискового судна составляют - для первой помехи 60°, для второй 140°, для третьей 240°;
- угол места источника сигнала (автономного донного подводного объекта) относительно водной поверхности акватории поиска принят равным 70°;
- углы места источников помех (мест отражения от морского дна акустических колебаний мешающих надводных судов) выбраны равными - для первой помехи 10°, для второй 20°, для третьей 30°;
- наклонные расстояния до источников - первой помехи 5000 м, второй помехи 3000 м, третьей помехи 1000 м;
- отношения помеха/флуктуационный шум β1, β2, β3 в парциальных трактах приема пеленгационной антенны приняты - для первой помехи 40 дБ, для второй 30 дБ, для третьей 20 дБ;
- полоса частот ΔFs навигационного сигнала маяка-пингера автономного донного подводного объекта составляет 7.9 кГц;
- полосы ΔF1, ΔF2, ΔF3 для частотной фильтрации помех судоходства выбраны соответственно равными 100, 200 и 400 Гц;
- искомые коэффициенты снижения мощности спектральных составляющих сигнала в парциальных трактах приема исследованы как функции от всех возможных в процессе гидроакустического поиска автономного донного подводного объекта пеленгов (0°…360°) источника сигнала.
Проведенные расчеты позволили выявить:
- существенный разброс значений и разный характер изменений коэффициентов снижения мощности спектральных составляющих сигнала по парциальным трактам приема пеленгационной антенны;
- значительные изменения коэффициентов снижения мощности в зависимости от пеленга источника сигнала.
Соответствующие расчеты также показали, что несмотря на значительные изменения коэффициентов снижения мощности, их разброс и разный характер изменений по парциальным трактам приема пеленгационной антенны позволяют за счет введения линейного амплитудного детектирования с последетекторным сложением парциальных сигналов исключить после когерентной компенсации полное подавление спектральных составляющих сигнала на частотах помех судоходства.
Иллюстрацией этому являются зависимости отношений сигнал/помеха для трех спектральных составляющих сигнала (150, 300 и 600 Гц) после операции последетекторного сложения, полученные для указанных выше условий скрытного гидроакустического поиска автономного донного подводного объекта и представленные на фиг. 9. Отношение сигнал/флуктуационный шум для указанных спектральных составляющих сигнала в парциальных трактах приема принято равным 30 дБ.
Из фиг. 9 видно, что после операции последетекторного сложения отсутствует полное подавление указанных спектральных составляющих сигнала в зависимости от изменения пеленга источника сигнала, что подтверждает целесообразность введения указанной операции после осуществления когерентной компенсации помех судоходства в процессе скрытного гидроакустического поиска автономного донного подводного объекта.
Подавление помех судоходства с использованием когерентной компенсации в процессе скрытного гидроакустического поиска осуществляется в условиях самых разнообразных относительных перемещений поискового и мешающих судов в акватории поиска автономного необитаемого донного подводного объекта.
Поскольку когерентная компенсация помех судоходства предполагает на известное время, соответствующее суммарной длительности посылки опознавания и навигационной посылки маяка-пингера, приостановку адаптивного комплексного взвешивания с сохранением ранее полученных коэффициентов комплексного взвешивания, то указанное действие в условиях относительных перемещений поискового и мешающих судов может привести к снижению отношения сигнал/помеха после когерентной компенсации. Это обусловлено появляющимися за счет перемещений поискового и мешающих судов изменениями фазовых соотношений колебаний помех в парциальных трактах приема пеленгационной антенны, которые отличаются от фазовых соотношений, определяющих коэффициенты оптимального комплексного взвешивания, что приводит к увеличению некомпенсированного остатка помех и снижению отношения сигнал/помеха после когерентной компенсации.
Базовым параметром пространственного перемещения надводных объектов может служить максимальное изменение пеленгов мешающих судов относительно поискового судна за время приема на нем навигационного сигнала маяка-пингера автономного донного подводного объекта, которое зависит от курсов судов, расстояния между судами и скоростей их передвижения.
Наихудшим сценарием скрытного гидроакустического поиска автономного донного подводного объекта является передвижение поискового и мешающих судов параллельными встречными курсами с перемещением мешающих судов от траверза поискового судна. Такое передвижение судов приводит к максимальному, за выбранное время наблюдения, изменению пеленгов мешающих судов относительно поискового, характеризуя наихудшие условия воздействия помех мешающего судоходства.
Проведены расчеты отношения сигнал/помеха после когерентной компенсации помех в парциальных трактах приема пеленгационной антенны при максимальных изменениях пеленгов мешающих судов относительно поискового судна, за время приема на нем навигационного сигнала маяка-пингера автономного подводного объекта, в указанном сценарии передвижения поискового и мешающих судов со следующими исходными данными:
- длительность навигационного сигнала маяка-пингера автономного донного подводного объекта выбрана равной 2.2 секунды в соответствии с рекомендациями [4] по обеспечению эффективного скрытного гидроакустического поиска;
- максимальная скорость движения поискового судна принята равной пяти узлам, что также соответствует рекомендациям [4] по обеспечению необходимой точности позиционирования автономного донного подводного объекта;
- диапазон скоростей движения мешающих судов (от дрейфа до 40 узлов) выбран на основании данных [14] о наиболее распространенных скоростях передвижения современных надводных судов различного технологического устройства и назначения;
- расстояние по траверзу 0.3 мили между поисковым и мешающими судами задано из соображений оценки максимального изменения пеленга при возможном критическом расстоянии между судами с учетом правил [15] предупреждения столкновений судов в море.
Полученные результаты расчетов свидетельствуют об отсутствии снижения отношения сигнал/помеха после когерентной компенсации помех в парциальных трактах приема пеленгационной антенны при наихудшем сценарии скрытного гидроакустического поиска автономного донного подводного объекта в условиях передвижения надводных мешающих судов со скоростями до 40 узлов.
Такие результаты объясняются весьма незначительными изменениями фазовых соотношений колебаний помех в парциальных трактах приема пеленгационной антенны, при относительных перемещениях поискового и мешающих судов, вследствие малых линейных размеров пеленгационной антенны поискового судна по сравнению с расстояниями до источников помех - мест отражения акустических колебаний мешающих надводных судов от морского дна.
Таким образом, предлагаемое техническое решение позволяет достичь желаемого эффекта - осуществления скрытного гидроакустического поиска автономного донного подводного объекта с надводного поискового судна в условиях воздействия помех судоходства, за счет до сих пор не применявшегося сочетания: использования в процессе поисковых действий когерентной компенсации сосредоточенных помех мешающего судоходства на поисковом судне, выполняемой в паузах между интервалами излучения навигационного сигнала с подводного объекта, которая включает в себя частотное разделение помех от разных надводных источников в трех выбранных поддиапазонах частот, комплексное взвешивание в выбранных поддиапазонах частот колебаний сосредоточенных помех соответствующих парциальных трактов приема пеленгационной антенны, вычитание из колебаний сосредоточенных помех каждого основного парциального тракта приема трех взвешенных в выбранных поддиапазонах частот колебаний сосредоточенных помех соответствующих вспомогательных парциальных трактов приема, приостановки когерентной компенсации на время приема навигационного сигнала маяка-пингера, осуществления после когерентной компенсации линейного амплитудного детектирования и последетекторного сложения сигналов парциальных трактов приема пеленгационной антенны, что в совокупности позволяет реализовать в процессе скрытного гидроакустического поиска достоверный прием навигационного сигнала автономного донного подводного объекта на поисковом судне в условиях помех мешающего судоходства.
Такая совокупность признаков нового технического решения отличает предлагаемый способ от известных в настоящее время способов гидроакустического позиционирования подводных объектов.
Список использованных источников
1. Гидроакустическая навигационная система с ультракороткой базой [Электронный ресурс] // URL: http://edboe.ru (дата обращения: 11.11.2020).
2. Арсентьев В.Г., Криволапов Г.И. Позиционирование объектов в гидроакустической навигационной системе с ультракороткой базой // Вестник СибГУТИ. Новосибирск. 2018. №4.
3. Патент RU 2593651, МПК G01S 15/00. Гидроакустический способ определения местоположения автономного подводного аппарата / B.C. Комаров, М.С.Клюев, А.А. Шрейдер. Заявлено 09.06.2015, опубликовано 10.08.2016.
4. Патент RU 2727331, МПК G01S 15/00. Способ гидроакустического поиска автономного донного подводного объекта / В.Г. Арсентьев, Г.И. Криволапов. Заявлено 25.12.2019, опубликовано 21.07.2020. Бюл. №21.
5. Спектры шумов кораблей [Электронные ресурсы] // URL: https://myslide.ru/documents_4/7i018b920e76ca67a70f5e146c83fB09/img13.jpg; https://present5.com/presentation/183941860_279148258/image-10.jpg (дата обращения: 11.11.2020).
6. Модели сигналов и помех [Электронный ресурс] // URL: https://scask.ru/i_book_nsp.php?id=37 (дата обращения: 11.11.2020).
7. Адаптивная компенсация помех в каналах связи / Ю.И. Лосев, А.Г. Бердников, Э.Ш. Гойхман, Б.Д. Сизов. М.: Радио и связь, 1988.
8. Техника и принципы схемотехнической реализации фильтров на операционных усилителях [Электронный ресурс] // URL: http://studbooks.net/783435/tehnika/printsipy_shemotehnicheskoy_realizatsii_filtrov_na_operatsionnom_usilitele (дата обращения: 11.11.2020).
9. Широкополосные фазовращатели [Электронный ресурс] // URL: http://www.radioradar.net/radiofan/radiofan_technology/broadband_shifters.html (дата обращения: 11.11.2020).
10. Четырехквадрантный умножитель AD834 [Электронный ресурс] // URL: http://www.analog.com/ru/products/analog-functions/analog-multipliers-dividers/ad834.html (дата обращения: 11.11.2020).
11. Аналоговые компараторы [Электронный ресурс] // URL: http://www.diagram.com.ua/list/sprav/sprav148.shtml (дата обращения: 11.11.2020).
12. Прецизионные малошумящие операционные усилители [Электронный ресурс] // URL: http://www.symmetron.ru/news/maxim-MAX44250.shtml (дата обращения: 11.11.2020).
13. Уидроу Б., Стирнз С. Адаптивная обработка сигналов. Пер. с англ. под редакцией В.В. Шахгильдяна. М.: Радио и связь, 1989.
14. Скорость морского судна [Электронный ресурс] // URL: http://seaships.ru/speed.htm (дата обращения: 11.11.2020).
15. Письменный М.Н. Краткий курс лекций по изучению международных правил предупреждения столкновений судов в море [Электронный ресурс] // URL: http://pilotservice.narod.ru (дата обращения: 11.11.2020).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| Способ определения местоположения подводного объекта | 2018 |
|
RU2700278C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |

Использование: изобретение относится к области подводной навигации и может быть использовано в системах гидроакустического мониторинга различного назначения, интегрированных системах подводного наблюдения, позиционных сетецентрических сетях для скрытного гидроакустического поиска с надводного поискового судна подводных объектов, находящихся на дне известной морской акватории в спящем режиме после выполнения соответствующей миссии. Сущность: существенными отличиями заявляемого способа являются использование при обработке на поисковом судне навигационного сигнала маяка-пингера автономного донного подводного объекта адаптивной когерентной компенсации сосредоточенных помех мешающего судоходства в парциальных трактах приема пеленгационной антенны, выполняемой в паузах между интервалами излучения навигационного сигнала с подводного объекта, с частотным разделением помех от разных надводных источников в трех выбранных поддиапазонах частот и приостановкой когерентной компенсации на время приема навигационного сигнала маяка-пингера, осуществление после когерентной компенсации линейного амплитудного детектирования и последетекторного сложения сигналов парциальных трактов приема пеленгационной антенны, что в совокупности позволяет осуществлять скрытный гидроакустический поиск автономного донного подводного объекта в условиях воздействия сосредоточенных помех ближнего и дальнего судоходства. Технический результат: обеспечение скрытного гидроакустического поиска с надводного поискового судна автономного донного подводного объекта в условиях воздействия сосредоточенных помех ближнего и дальнего судоходства, реализованного за счет видоизменения структуры обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне. 9 ил.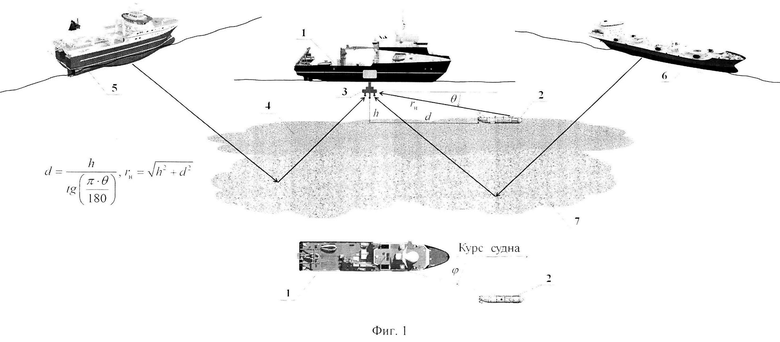
Способ скрытного гидроакустического поиска с надводного поискового судна автономного донного подводного объекта, находящегося в спящем режиме на дне известной морской акватории после выполнения соответствующей миссии, заключающийся в оборудовании поискового судна согласованной с его курсом пеленгационной антенной диаметрально-ортогональной геометрии расположения четырех приемных гидрофонов, слабонаправленной передающей гидроакустической антенной, аппаратурой приема и обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на базе высокостабильного опорного генератора, аппаратурой формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустическим эхолотом для измерения глубины акватории поиска со структурой зондирующих импульсов, позволяющей обеспечить акустическое восприятие процедуры измерения глубины водной акватории поиска, приближающееся к возможному гибридному шумовому фону морской среды, в оснащении автономного донного подводного объекта системой изменения плавучести, слабонаправленными приемной и передающей гидроакустическими антеннами, аппаратурой приема и обработки сигналов активации и всплытия поискового судна, маяком-пингером, формирующим, с использованием высокостабильного опорного генератора, повторяющийся навигационный сигнал, в формировании и запоминании при подготовке миссии автономного подводного объекта на подводном объекте и поисковом судне излучаемых в процессе гидроакустического поиска сигналов: на автономном подводном объекте - навигационного сигнала маяка-пингера, на поисковом судне - сигналов активации и всплытия автономного донного подводного объекта, имеющих заданную структуру, амплитудные, временные и частотные параметры, по акустическому восприятию приближающихся к возможным фоновым шумам известной акватории поиска, при этом сигналы активации и всплытия поискового судна состоят из двух составляющих: стартовой посылки и посылки опознавания, а навигационный сигнал маяка-пингера автономного донного подводного объекта содержит четыре составляющие: стартовую посылку, посылку опознавания, навигационную посылку в виде гармонического сигнала известной на поисковом судне частоты и маскирующий навигационную посылку квазибелый шум, частотные параметры которого обеспечивают необходимую точность определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, кроме этого, структура и параметры излучаемого навигационного сигнала маяка-пингера автономного донного подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов активации и всплытия поискового судна априорно известны на автономном донном подводном объекте, в выполнении перед поиском процедуры калибровки парциальных трактов приема навигационного сигнала поискового судна с получением и запоминанием калибровочных поправок, в повторяющемся, по мере продвижения поискового судна по акватории поиска, излучении его передающей антенной в водную среду пространства нижней полусферы, относительно поискового судна, гидроакустического сигнала активации автономного донного подводного объекта, превышающего фоновые шумы водной среды акватории поиска, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала активации поискового судна, в переводе оборудования автономного донного подводного объекта, по факту достоверного приема сигнала активации, из спящего в рабочий режим, в излучении передающей антенной автономного донного подводного объекта в водную среду акватории поиска в направлениях верхней полусферы, относительно морского дна, гидроакустического навигационного сигнала, превышающего фоновые шумы водной среды, сформированного маяком-пингером и повторяющегося с интервалом большим его длительности, в приеме пеленгационной антенной поискового судна навигационного сигнала маяка-пингера и его соответствующей обработке с последующим прекращением, по факту его достоверного приема, излучения передающей антенной поискового судна гидроакустического сигнала активации автономного донного подводного объекта, в измерении и запоминании глубины водной акватории поиска эхолотом поискового судна, в осуществлении, в процессе поиска, на поисковом судне процедуры определения и запоминания угловых координат автономного донного подводного объекта относительно поискового судна, согласованной с геометрическими параметрами пеленгационной антенны и позволяющей позиционировать автономный донный подводный объект относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/маскирующий шум навигационной посылки маяка-пингера, в оценке и запоминании по определенному углу места и измеренной глубине водной акватории поиска приближенных значений дальности и наклонного расстояния до автономного донного подводного объекта с использованием соответствующих тригонометрических соотношений, в корректировке курса движения поискового судна на основании обновляемых параметров местоположения автономного донного подводного объекта относительно поискового судна по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта, в излучении передающей антенной поискового судна в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, в паузе между излучениями навигационного сигнала маяка-пингера автономного донного подводного объекта, гидроакустического сигнала всплытия автономного донного подводного объекта, превышающего фоновые шумы водной среды, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала всплытия, в прекращении, по факту достоверного приема сигнала всплытия, излучения передающей антенной автономного донного подводного объекта навигационного сигнала маяка-пингера, в запуске соответствующих исполнительных механизмов системы изменения плавучести автономного донного подводного объекта, отличающийся тем, что видоизменяют структуру обработки навигационного сигнала маяка-пингера автономного донного подводного объекта на поисковом судне: разделяют возможный частотный диапазон сосредоточенных помех мешающего судоходства на три поддиапазона - по максимальному количеству помех, которые можно подавить с использованием четырехэлементной пеленгационной антенны, организуют из четырех парциальных трактов приема пеленгационной антенны четыре группы каналов обработки сигналов, из четырех каналов приема в каждой группе, по принципу «три для одного» - для подавления сосредоточенных помех в одном, основном, канале приема группы используют три соответствующих вспомогательных канала приема, осуществляют в каждой группе каналов обработки сигналов, во время отсутствия излучения кратковременно повторяющегося в процессе гидроакустического поиска сигнала маяка-пингера, когерентную компенсацию колебаний сосредоточенных помех основного канала приема взвешенными колебаниями сосредоточенных помех вспомогательных каналов приема с использованием операции адаптивного комплексного взвешивания, при этом сигналы каждого вспомогательного канала приема подвергают частотной фильтрации в соответствующем поддиапазоне возможного частотного диапазона сосредоточенных помех мешающего судоходства, затем выполняют линейное амплитудное детектирование и последетекторное сложение сигналов парциальных трактов приема пеленгационной антенны, осуществляют, с появлением излучения маяка-пингера, последетекторный прием стартовой посылки навигационного сигнала, после чего на известное время, соответствующее суммарной длительности посылки опознавания и навигационной посылки маяка-пингера, приостанавливают операцию адаптивного комплексного взвешивания с сохранением ранее полученных коэффициентов комплексного взвешивания, выполняют прием посылки опознавания сигнала маяка-пингера, реализуют, после вынесения решения о достоверном приеме посылки опознавания сигнала маяка-пингера, процедуру определения угловых координат автономного донного подводного объекта относительно поискового судна с предварительной полосовой фильтрацией сигнала маяка-пингера в полосе частот его замаскированной шумом навигационной посылки и подавлением вне полосы фильтрации сосредоточенных помех судоходства.
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| Способ определения местоположения подводного объекта | 2018 |
|
RU2700278C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| WO 2007022233 A2, 22.02.2007. | |||

