Предлагаемое изобретение относится к области подводной навигации, а именно к определению местоположения автономного донного подводного объекта посредством гидроакустической навигационной системы и может быть использовано в системах гидроакустического мониторинга различного назначения, интегрированных системах подводного наблюдения, позиционных сетецентрических системах для скрытного гидроакустического поиска с надводного судна подводных объектов, например, автономной донной станции мониторинга, подводного робота разведчика, многофункционального автономного необитаемого подводного аппарата, находящихся на дне известной морской акватории в спящем режиме после выполнения соответствующей миссии.
Известен близкий по функциональному назначению способ навигации [1], где исследуемый полигон акватории координируют тремя акустическими маяками-ответчиками, с которыми автономный подводный объект взаимодействует, получая запрос и передавая свой акустический сигнал, а маяки передают на поисковое судно свои расстояния до подводного объекта. На судне вычисляют координаты объекта как точку пересечения трех сфер и уточняют их по мере приближения судна к подводному объекту.
Этот способ достаточно громоздок, требует больших затрат судового времени для развертывания, дорог в эксплуатации и не обеспечивает скрытности гидроакустического поиска, поскольку сигналы взаимодействия автономного подводного объекта, маяков-ответчиков и поискового судна обнаруживаются и идентифицируются существующими гидроакустическими средствами наблюдения и мониторинга, что является весьма нежелательным обстоятельством при выполнении некоторых разведывательных и мониторинговых задач в различных морских акваториях.
Известна гидроакустическая навигационная система [2] с ультракороткой базой для позиционирования подводных объектов, в которой надводное судно оснащается четырехэлементной пеленгационной антенной диаметрально-ортогональной геометрии, а запрашиваемый подводный объект передает на надводное судно комбинированный сигнал, в общем случае, состоящий из навигационного и информационного блоков. Соответствующая обработка этого сигнала в условиях больших отношений сигнал/шум позволяет с достаточной точностью определять параметры местоположения подводного объекта: пеленг ϕ, угол места θ, дальность d, наклонное расстояние rн относительно надводного судна и получать от объекта необходимые информационные сообщения. Указанные параметры местоположения связаны между собой соотношениями:  где h - глубина погружения подводного объекта. В этой системе также не обеспечивается скрытность, поскольку сигналы взаимодействия подводного объекта и надводного судна обнаруживаются и идентифицируются существующими гидроакустическими средствами наблюдения и мониторинга.
где h - глубина погружения подводного объекта. В этой системе также не обеспечивается скрытность, поскольку сигналы взаимодействия подводного объекта и надводного судна обнаруживаются и идентифицируются существующими гидроакустическими средствами наблюдения и мониторинга.
Известен способ [3] определения относительно поискового судна местоположения автономного донного подводного аппарата, снабженного маяком-пингером, излучающим периодические тональные импульсные сигналы, предварительно синхронизированные с судовым генератором аналогичных опорных сигналов, при этом сигналы маяка-пингера принимают судовой антенной, вычисляют их временное смещение относительно одноименных опорных сигналов, умножая которое на скорость звука в воде, получают наклонное расстояние по лучу от маяка-пингера до антенны судна, вместе с тем используя судовую приемную антенну дипольного типа с минимумом диаграммы направленности и механически вращая ее относительно вертикальной оси, фиксируют пеленг маяка-пингера автономного донного подводного аппарата относительно судовых координат по минимуму амплитуды принимаемого сигнала, а также используя судовой эхолот, определяют глубину акватории под судном, затем из геометрического построения прямоугольного треугольника вычисляют проекцию наклонного расстояния на горизонтальную поверхность дна (дальность аппарата), что в совокупности с углом пеленга дает оценку ориентировочных, относительно поискового судна, координат автономного донного подводного аппарата, которые постоянно уточняются по мере движения судна в направлении позиционируемого подводного аппарата.
Данному способу также присущ недостаток, связанный с отсутствием скрытности процесса гидроакустического поиска автономного донного подводного объекта, вследствие использования и возможного опознавания демаскирующих, имеющих искусственное происхождение, акустических сигналов, свидетельствующих, по данным гидроакустической разведки, о самом факте проведения привлекающих внимание подводных работ.
На основании признаков способа [3], навигационной системы [2] и очевидных технических решений можно сформулировать признаки, которые могут присутствовать как в известных, так и в заявляемом способах:
- поисковое судно снабжается приемной пеленгационной и передающей гидроакустическими антеннами, оборудованием для приема и обработки сигнала маяка-пингера автономного донного подводного объекта, аппаратурой формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустическими средствами измерения глубины акватории поиска;
- автономный донный подводный объект оснащается приемной и передающей гидроакустическими антеннами, системой изменения плавучести, маяком-пингером, формирующим кратковременный, повторяющийся навигационный сигнал, аппаратурой приема и обработки сигналов активации и всплытия поискового судна;
- формирование навигационного сигнала автономного донного подводного объекта и его обработка на поисковом судне производятся с использованием высокостабильных опорных генераторов;
- перевод автономного донного подводного объекта из спящего в рабочий режим осуществляется путем подачи с поискового судна гидроакустического сигнала активации;
- местоположение автономного донного подводного объекта относительно поискового судна оценивается на основе гидроакустических измерений глубины акватории поиска, определения наклонного расстояния и дальности между поисковым судном и автономным донным подводным объектом, угловых параметров объекта в системе координат пеленгационной антенны поискового судна;
- курс движения поискового судна в процессе поиска корректируется по мере обновления оценок местоположения автономного донного подводного объекта в акватории поиска;
- подъем на поверхность автономного подводного объекта осуществляется с использованием системы изменения плавучести, запуск исполнительных механизмов которой производится подачей с поискового судна гидроакустического сигнала всплытия.
Совокупность перечисленных выше признаков позволяет синтезировать способ-прототип, который предполагает в процессе гидроакустического поиска автономного донного подводного объекта следующие действия и операции:
- устанавливают на надводном поисковом судне согласованную с его курсом пеленгационную гидроакустическую антенну диаметрально-ортогональной геометрии размещения четырех приемных гидрофонов, слабонаправленную передающую гидроакустическую антенну, оборудование для приема и обработки сигнала маяка-пингера автономного донного подводного объекта на базе высокостабильного опорного генератора, аппаратуру формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустические средства измерения глубины акватории поиска;
- оснащают автономный донный подводный объект слабонаправленными приемной и передающей гидроакустическими антеннами, оборудованием формирования сигнала маяка-пингера с использованием высокостабильного опорного генератора, аппаратурой приема и обработки сигналов активации и всплытия поискового судна;
- излучают с поискового судна, по мере его движения по акватории поиска, в водную среду пространства нижней полусферы, относительно поискового судна, гидроакустический сигнал активации автономного донного подводного объекта, превышающий фоновые шумы водной среды акватории поиска;
- принимают и обрабатывают на автономном донном подводном объекте гидроакустический сигнал активации, переводят оборудование автономного донного подводного объекта из спящего в рабочий режим;
- формируют с использованием высокостабильного опорного генератора на автономном донном подводном объекте кратковременный, повторяющийся с интервалом, большим его длительности, навигационный сигнал маяка-пингера, частота которого априорно известна на поисковом судне;
- излучают гидроакустической антенной автономного донного подводного объекта, в направлениях верхней полусферы, относительно морского дна, сформированный сигнал маяка-пингера, превышающий фоновые шумы водной среды акватории поиска;
- принимают и обрабатывают на поисковом судне гидроакустический сигнал маяка-пингера автономного донного подводного объекта, после чего прекращают излучение сигнала активации с поискового судна;
- измеряют судовым эхолотом глубину водной акватории поиска;
- определяют с использованием судовой четырехэлементной пеленгационной антенны диаметрально-ортогональной геометрии пеленг и угол места автономного донного подводного объекта относительно поискового судна;
- оценивают по вычисленному углу места и измеренной глубине водной акватории поиска приближенные значения дальности и наклонного расстояния до автономного донного подводного объекта с использованием соответствующих тригонометрических соотношений;
- корректируют курс движения поискового судна на основании обновляемых, по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта, параметров местоположения автономного донного подводного объекта относительно поискового судна;
- излучают с поискового судна, в паузе между сигналами маяка-пингера автономного донного подводного объекта, в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, гидроакустический сигнал всплытия автономного донного подводного объекта, превышающий фоновые шумы водной среды акватории поиска;
- принимают и обрабатывают на автономного донном подводном объекте гидроакустический сигнал всплытия, запускают соответствующие исполнительные механизмы системы изменения плавучести, прекращают излучение сигнала маяка-пингера.
Техническим результатом заявляемого способа является повышение скрытности гидроакустического поиска с надводного поискового судна автономного донного подводного объекта за счет использования в процессе поисковых действий гидроакустических сигналов, маскируемых под возможные акустические фоновые шумы акватории поиска - звуки морских животных, рыб, ракообразных, шумы моря, выбора надлежащей структуры, амплитудных, временных и частотных параметров этих гидроакустических сигналов, реализации соответствующих действий по излучению, приему и обработке гидроакустических сигналов на поисковом судне и автономном донном подводном объекте.
Данный технический результат достигается за счет того, что в способе гидроакустического поиска с надводного поискового судна автономного донного подводного объекта, находящегося в спящем режиме в известной морской акватории после выполнения соответствующей миссии, заключающемся в оборудовании поискового судна согласованной с его курсом пеленгационной антенной диаметрально-ортогональной геометрии расположения четырех приемных гидрофонов, слабонаправленной передающей гидроакустической антенной, аппаратурой приема и обработки сигнала маяка-пингера автономного донного подводного объекта на базе высокостабильного опорного генератора, аппаратурой формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустическими средствами измерения глубины акватории поиска, в оснащении автономного донного подводного объекта слабонаправленными приемной и передающей гидроакустическими антеннами, аппаратурой приема и обработки сигналов активации и всплытия поискового судна, маяком-пингером, формирующим, с использованием высокостабильного опорного генератора, повторяющийся навигационный сигнал, частота которого априорно известна на поисковом судне, системой изменения плавучести, в повторяющемся, по мере продвижения поискового судна по акватории поиска, излучении его передающей антенной в водную среду пространства нижней полусферы, относительно поискового судна, гидроакустического сигнала активации автономного донного подводного объекта, превышающего фоновые шумы водной среды акватории поиска, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала активации поискового судна, в переводе оборудования автономного донного подводного объекта, по факту достоверного приема сигнала активации, из спящего в рабочий режим, в излучении передающей антенной автономного донного подводного объекта в водную среду акватории поиска, в направлениях верхней полусферы, относительно морского дна, гидроакустического навигационного сигнала, превышающего фоновые шумы водной среды, сформированного маяком-пингером и повторяющегося с интервалом, большим его длительности, в приеме пеленгационной антенной поискового судна гидроакустического сигнала маяка-пингера и его соответствующей обработке, с последующим прекращением, по факту его достоверного приема, излучения передающей антенной поискового судна гидроакустического сигнала активации автономного донного подводного объекта, в измерении и запоминании глубины водной акватории поиска гидроакустическими средствами измерения поискового судна, в определении и запоминании пеленга и угла места автономного донного подводного объекта относительно поискового судна, в оценке и запоминании по определенному углу места и измеренной глубине водной акватории поиска приближенных значений дальности и наклонного расстояния до автономного донного подводного объекта с использованием соответствующих тригонометрических соотношений, в корректировке курса движения поискового судна на основании обновляемых параметров местоположения автономного донного подводного объекта относительно поискового судна, по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта, в излучении передающей антенной поискового судна в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, в паузе между сигналами маяка-пингера автономного донного подводного объекта, гидроакустического сигнала всплытия автономного донного подводного объекта, превышающего фоновые шумы водной среды, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала всплытия, в прекращении, по факту достоверного приема сигнала всплытия, излучения передающей антенной автономного донного подводного объекта гидроакустического сигнала маяка-пингера, в запуске соответствующих исполнительных механизмов системы изменения плавучести автономного донного подводного объекта, формируют и запоминают при подготовке миссии автономного подводного объекта на подводном объекте и поисковом судне излучаемые в процессе гидроакустического поиска сигналы: на автономном подводном объекте - сигналы маяка-пингера, на поисковом судне - сигналы активации и всплытия автономного донного подводного объекта, имеющие заданную структуру, амплитудные, временные и частотные параметры, по акустическому восприятию приближающиеся к возможным фоновым шумам известной акватории поиска, при этом сигналы активации и всплытия поискового судна состоят из двух составляющих: стартовой посылки и посылки опознавания, комбинированный сигнал маяка-пингера автономного донного подводного объекта содержит четыре составляющие: стартовую посылку, посылку опознавания, навигационную посылку в виде гармонического сигнала известной на поисковом судне частоты и маскирующий навигационную посылку квазибелый шум, частотные параметры которого выбирают, исходя из необходимой точности определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, обеспечивая необходимую полосу частот и соответствующее превышение нижней граничной частоты его спектра над частотой гармонических колебаний навигационной посылки, видоизменяют структуру зондирующих импульсов судового эхолота таким образом, чтобы акустическое восприятие процедуры измерения глубины водной акватории поиска соответствовало возможному гибридному шумовому фону морской среды, кроме этого, структура и параметры излучаемых сигналов маяка-пингера автономного донного подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов активации и всплытия поискового судна априорно известны на автономном донном подводном объекте, выполняют перед поиском процедуру калибровки усилительных трактов пеленгационной антенны поискового судна с получением и запоминанием калибровочных поправок, осуществляют в процессе поиска на поисковом судне процедуру определения и запоминания угловых координат автономного донного подводного объекта относительно поискового судна, согласованную с геометрическими параметрами пеленгационной антенны и позволяющую позиционировать автономный донный подводный объект относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/шум замаскированного навигационного сигнала.
Существенным отличием заявляемого способа является использование в процессе поисковых действий гидроакустических сигналов, маскируемых под возможные акустические фоновые шумы акватории поиска - звуки морских животных, рыб, ракообразных, шумы моря, с выбором их надлежащей структуры, амплитудных, временных и частотных параметров, применение процедуры определения угловых координат автономного донного подводного объекта, согласованной с геометрическими параметрами пеленгационной антенны поискового судна, которая совместно с процедурой калибровки усилительных трактов пеленгационной антенны поискового судна позволяет осуществлять позиционирование автономного донного подводного объекта относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/шум замаскированного навигационного сигнала, что в совокупности позволяет повысить скрытность гидроакустического поиска автономного донного подводного объекта.
Совокупность существенных признаков заявляемого способа имеет причинно-следственную связь с достигаемым техническим результатом, из чего можно заключить, что данное техническое решение является новым, обладает изобретательским уровнем, так как явным образом не следует из существующего уровня техники, и пригодно для практического применения.
Предлагаемое изобретение поясняется чертежами.
На фиг. 1 изображена упрощенная стилизованная структура сигнала активации автономного донного подводного объекта, излучаемого с поискового судна в исследуемую акваторию в начале поиска.
На фиг. 2 показана упрощенная стилизованная структура сигнала всплытия автономного донного подводного объекта, излучаемого с поискового судна в исследуемую акваторию на завершающей стадии поиска.
На фиг. 3 представлена упрощенная стилизованная структура комбинированного сигнала маяка-пингера, излучаемого в исследуемую акваторию с автономного донного подводного объекта в процессе его поиска.
Фиг. 4 поясняет асинхронный режим приема-передачи сигналов поискового судна и автономного донного подводного объекта, исключающий возможность временного перекрытия излучаемых и принимаемых сигналов.
На фиг. 5 и фиг. 6 показаны примеры фрагментов сонограмм записей возможных акустических шумов морской акватории поиска, предназначенные для формирования излучаемых в процессе поиска сигналов поискового судна и автономного донного подводного объекта.
На фиг. 7 представлен пример возможного ансамбля из четырех комбинированных сигналов маяка-пингера автономного донного подводного объекта, излучаемых в исследуемую акваторию в процессе его поиска.
На фиг. 8 и фиг 9 приведены примеры укрупненных структурных схем оборудования поискового судна и автономного донного подводного объекта.
На фиг. 10 показан пример размещения четырех гидрофонов судовой пеленгационной антенны диаметрально-ортогональной геометрии в декартовой системе координат.
На фиг. 11 представлен схематичный вариант возможного конструктивного исполнения пеленгационной антенны диаметрально-ортогональной геометрии поискового судна шахтного (колодезного) спуска.
Фиг. 12 поясняет принцип определения местоположения автономного донного подводного объекта в процессе гидроакустического поиска, где обозначены: 1 - поисковое судно; 2 - автономный донный подводный объект; 3 - судовая пеленгационная антенна; 4 - морское дно; ϕ, θ - пеленг и угол места автономного донного подводного объекта соответственно; h - глубина акватории поиска; d - дальность автономного донного подводного объекта; rн - наклонное расстояние между поисковым судном и автономным донным подводным объектом.
На фиг. 13 и фиг. 14 представлены зависимости абсолютных погрешностей определения угловых координат автономного донного подводного объекта относительно поискового судна от отношения сигнал/маскирующий шум в навигационной посылке комбинированного сигнала маяка-пингера для ближней и дальней зон гидроакустического поиска.
Для осуществления скрытного гидроакустического поиска к сигналам, излучаемым с поискового судна и автономного донного подводного объекта в акваторию поиска, предъявляют следующие основные структурные требования:
- акустическое восприятие излучаемых сигналов должно соответствовать возможному акустическому шумовому фону морской среды;
- общая структура сигналов должна обеспечивать возможность осуществления асинхронного режима приема-передачи сигналов поискового судна и автономного донного подводного объекта;
- из временных циклов излучаемых сигналов должна быть исключена строгая периодичность повторения;
- излучаемые сигналы должны обладать структурой, позволяющей осуществлять их необходимое различение на фоне флуктуационных шумов морской среды;
- превышение излучаемых сигналов над фоновыми шумами морской среды должно быть достаточным для их достоверного приема.
Указанным структурным требованиям удовлетворяют гидроакустические сигналы импульсного характера, сформированные на основе соответствующих фрагментов сонограмм записей морских животных, рыб и ракообразных с надлежащим выбором их структуры, амплитудных, временных и частотных параметров.
Рассмотрим подробнее структурные характеристики сигналов поискового судна и автономного донного подводного объекта, предлагаемых к использованию в процессе скрытного гидроакустического поиска.
Сигнал активации a(t) автономного донного подводного объекта (фиг. 1), излучаемый с поискового судна в исследуемую акваторию с интервалом ТА до ответа маяка-пингера автономного донного подводного объекта, имеет две составляющие вида
где q(t1) - стартовая посылка сигнала активации; b(t2) - посылка опознавания сигнала активации; Uq - амплитуда стартовой посылки сигнала активации; Ub - средняя амплитуда импульсов посылки опознавания сигнала активации; Δτ1 - длительность стартовой посылки сигнала активации; Δτ2 - длительность посылки опознавания сигнала активации; ТА - интервал излучения сигнала активации.
Сигнал всплытия e(t) автономного донного подводного объекта (фиг. 2), излучаемый с поискового судна в акваторию поиска после приближения надводного судна к автономному донному подводному объекту на безопасную дальность его всплытия, имеет две структурно аналогичные сигналу активации (1), составляющие:
где g(t1) - стартовая посылка сигнала всплытия; j(t2) - посылка опознавания сигнала всплытия; Ug - амплитуда стартовой посылки сигнала всплытия; Uj - средняя амплитуда импульсов посылки опознавания сигнала всплытия; Δτ3 - длительность стартовой посылки сигнала всплытия; Δτ4 - длительность посылки опознавания сигнала всплытия.
Формируемый с интервалом повторения ТМ комбинированный сигнал z(t) маяка-пингера автономного донного подводного объекта содержит в частотном диапазоне ΔFz четыре составляющие (фиг. 3) и имеет вид
где y(t1) - стартовая посылка сигнала маяка-пингера; s(t2) - посылка опознавания сигнала маяка-пингера; х(t3) - гармоническая навигационная посылка сигнала маяка-пингера; m(t3) - маскирующий гармоническую навигационную посылку сигнала маяка-пингера квазибелый шум; ƒ0 - частота колебаний гармонической навигационной посылки сигнала маяка-пингера; Uy - амплитуда стартовой посылки сигнала маяка-пингера; Us - средняя амплитуда импульсов посылки опознавания сигнала маяка-пингера; Ux - амплитуда гармонических колебаний навигационной посылки сигнала маяка-пингера; ϕх - начальная фаза гармонических колебаний навигационной посылки сигнала маяка-пингера; Δτ5 - длительность стартовой посылки сигнала маяка-пингера; Δτ6 - длительность посылки опознавания сигнала маяка-пингера; Δτ7 - длительность гармонической навигационной посылки и маскирующего шума сигнала маяка-пингера; Δτ8 - общая длительность сигнала маяка-пингера; σm - среднеквадратическое отклонение квазибелого шума, маскирующего гармоническую навигационную посылку сигнала маяка-пингера.
Принимаемый гидрофонами четырехэлементной гидроакустической пеленгационной антенны поискового судна комбинированный сигнал маяка-пингера z(t) автономного донного подводного объекта после линейного усиления характеризуется соотношениями:
где μ1, μ2, μ3, μ4 - коэффициенты, усредненные по частотному диапазону ΔFz сигнала z(t) маяка-пингера автономного донного подводного объекта, обусловленные затуханием акустических колебаний в водной среде акватории поиска, передаточными характеристиками соответствующих гидрофонов пеленгационной антенны и ее линейных усилителей; ϕ1, ϕ2, ϕ3, ϕ4 - фазовые сдвиги гармонических колебаний навигационной посылки, вносимые водной средой распространения сигнала, пространственным разнесением гидрофонов пеленгационной антенны поискового судна и ее линейными усилителями; ξ(t) - фоновый флуктуационный шум водной акватории поиска; σξ - среднеквадратическое отклонение фонового шума.
Квадратурные составляющие Y1(t) и Y2(t) сигнала Y(t) частоты ƒ0 с большим отношением сигнал/шум, сформированные на базе высокостабильного судового опорного генератора и необходимые для обработки замаскированных гармонических навигационных посылок маяка-пингера автономного донного подводного объекта, характеризуются как функционально связанные непрерывные гармонические колебания:

где U0, ϕ0 - амплитуда и начальная фаза колебаний.
Общая структура сигналов активации a(t), всплытия e(t) и маяка-пингера z(t) выбрана из соображений реализации асинхронного режима приема-передачи сигналов (фиг. 4) поискового судна и автономного донного подводного объекта с необходимым различением в условиях преимущественно флуктуационных шумов морской среды акватории поиска.
Детальная структура сигналов a(t), e(t), z(t) (стартовых посылок q(t1), g(t1), у(t1) и посылок опознавания b(t2), j(t2), s(t2)) ориентирована на использование в качестве составляющих указанных сигналов импульсных фрагментов сонограмм записей звуков морских животных, рыб и ракообразных, присущих известной акватории поиска (при условии их заблаговременной записи) или архивных записей звуков других, схожих по гидрологии, морских территорий.
При реализации заявляемого способа для стартовых посылок и посылок опознавания выбирают фрагменты сонограммы записей вышеуказанных звуков с ярко выраженным импульсным характером и хорошо различимой на фоне шумов моря внутриимпульсной структурой.
Навигационная посылка x(t3) комбинированного сигнала z(t) маяка-пингера представляет собой гармонический сигнал заданной частоты и длительности, маскируемый квазибелым шумом m(t3), в качестве которого используют фрагменты сонограмм записей шумов мелкого или глубокого моря в зависимости от предполагаемой глубины акватории поиска.
Длительности сигналов a(t), e(t), z(t) выбирают с учетом четырех взаимно противоречивых требований:
- большая скважность (отношение интервала повторения к длительности) излучаемых сигналов - для снижения акустической заметности процесса поиска автономного донного подводного объекта;
- достаточная длительность излучаемых сигналов - для получения их хорошего приближения к акустическому шумовому фону морской среды;
- ограниченная длительность излучаемых гидроакустических сигналов - для приемлемого времени получения обновляемых параметров местоположения автономного донного подводного объекта в процессе движения поискового судна, особенно на завершающей стадии поиска;
- достаточная, для определения с необходимой точностью угловых координат автономного донного подводного объекта относительно поискового судна, длительность гармонической навигационной посылки комбинированного сигнала маяка-пингера, маскируемой квазибелым шумом такой же длительности.
В качестве примера сбалансированного, компромиссного варианта, можно рекомендовать следующие временные параметры составляющих излучаемых гидроакустических сигналов, используемых в предлагаемом способе:
- длительности Δτ1, Δτ3, Δτ5 стартовых посылок q(t1), g(t1), y(t1) излучаемых сигналов поискового судна и автономного донного подводного объекта - около 0.02 с;
- длительность Δτ2 посылки опознавания b(t2) сигнала активации поискового судна - около 4 с;
- длительность Δτ4 посылки опознавания j(t2) сигнала всплытия поискового судна - около 3 с;
- длительность Δτ6 посылки опознавания s(t2) комбинированного сигнала маяка-пингера автономного донного подводного объекта - около 2 с;
- длительность Δτ7 навигационной посылки x(t3) и маскирующего шума m(t3) комбинированного сигнала маяка-пингера автономного донного подводного объекта - в пределах 0.1-0.2 с.
Требование исключения из временных циклов излучаемых в процессе поиска гидроакустических сигналов строгой периодичности повторения выполнено за счет введения следующих структурных и организационных компонентов:
- изменения случайным образом в процессе поиска интервалов повторения ТА, ТМ гидроакустических сигналов активации поискового судна и маяка-пингера автономного донного подводного объекта;
- формирования из фрагментов сонограмм записей звуков различных морских животных, рыб, ракообразных ансамблей сигналов активации поискового судна и комбинированных сигналов маяка-пингера автономного донного подводного объекта с разным количеством импульсов на выбранных длительностях посылок опознавания и случайным изменением порядка излучения этих сигналов в процессе поиска;
- число различающихся в ансамбле сигналов активации, сформированных на поисковом судне, и количество импульсов на выбранной длительности посылки опознавания каждого сигнала ансамбля априорно известны на автономном донном подводном объекте;
- число различающихся в ансамбле сигналов маяка-пингера, сформированных на автономном донном подводном объекте, и количество импульсов на выбранной длительности посылки опознавания каждого сигнала ансамбля априорно известны на поисковом судне.
Для обеспечения в процессе поиска асинхронного режима приема-передачи (см. фиг. 4), исключающего перекрытие по времени излучаемых и принимаемых гидроакустических сигналов на поисковом судне и автономном донном подводном объекте, случайные интервалы повторения гидроакустических сигналов активации ТА поискового судна и маяка-пингера ТМ автономного донного подводного объекта должны быть больше соответствующих минимально допустимых величин ТА>TA min, ТМ>TM min, которые выбирают, используя следующие расчетные соотношения:

где Δτ2 - длительность посылки опознавания сигнала активации поискового судна; Δτ4 - длительность посылки опознавания сигнала всплытия поискового судна; Δτ8 - общая длительность сигнала маяка-пингера автономного донного подводного объекта; cmin - минимально возможная скорость звука в морской воде; rн max - прогнозируемое максимально возможное наклонное расстояние от поискового судна до автономного донного подводного объекта при их акустическом контакте в акватории поиска.
Так, например, для рекомендованных выше значений длительности излучаемых гидроакустических сигналов Δτ2=4 с, Δτ4=3 с, Δτ8=2.2 с и величин cmin=1400 м/с, rн max=3000 м изменяемые случайным образом интервалы повторения ТА гидроакустических сигналов активации поискового судна должны быть не менее 17 с, а изменяемые также случайным образом интервалы повторения ТМ гидроакустических сигналов маяка-пингера автономного донного подводного объекта - не менее 8 с.
Посылки опознавания из ансамблей сигналов поискового судна или маяка-пингера автономного донного подводного объекта считают достоверно принятыми, если принято априорно известное на выбранной длительности посылок ансамбля количество импульсов, взятых из сонограмм записей звуков одного или нескольких морских животных, рыб или ракообразных, имеющих соответствующую форму и внутриимпульсную структуру для обеспечения возможного акустического шумового фона в акватории поиска.
Состав и структуру зондирующих импульсов судового эхолота, на основе соответствующих импульсных фрагментов сонограмм записей звуков морских животных, рыб, ракообразных, видоизменяют таким образом, чтобы их количество и внутриимпульсная окраска соответствовали возможному гибридному шумовому фону морской среды, а интервалы следования импульсов задают, исходя из априорно известной или предполагаемой максимальной глубины акватории поиска. Кроме этого, количество зондирующих импульсов эхолота на интервале времени равном длительности сигнала всплытия не должно совпадать с общим числом импульсов в сигнале всплытия для исключения возможности приема на автономном донном подводном объекте сигнала эхолота в качестве сигнала всплытия.
Соотношения амплитуд составляющих сигналов a(t), e(t), z(t) при их формировании из фрагментов соответствующих сонограмм записей звуков морских животных, рыб, ракообразных и шумов моря, с учетом основных структурных требований обеспечения возможного шумового фона акватории поиска, необходимого различения используемых импульсных сигналов и их достоверного приема в условиях флуктуационных шумов морской среды, устанавливают на основе следующих дополнительных обстоятельств:
- при осуществлении достоверного приема с интегрированием последовательности импульсов, имеющих существенно разные длительности, для получения соизмеримых уровней их огибающих, амплитуды импульсов малой длительности должны быть больше амплитуд импульсов большой длительности;
- для обеспечения достаточной маскировки регулярной составляющей (гармонической навигационной посылки) в сигнале маяка-пингера автономного донного подводного объекта среднеквадратическое отклонение квазибелого шума, маскирующего гармоническую навигационную посылку, должно быть значительно больше амплитуды гармонической посылки.
С учетом указанных обстоятельств, рекомендуются следующие амплитудные параметры составляющих излучаемых гидроакустических сигналов, используемых в заявляемом способе:
- превышение амплитуд Uq, Ug, Uy стартовых посылок сигналов активации, всплытия поискового судна и маяка-пингера автономного донного подводного объекта над средними амплитудами Ub, Uj, Us импульсов посылок опознавания указанных сигналов - около 15 дБ;
- превышение среднеквадратического отклонения σm квазибелого шума, маскирующего навигационную посылку сигнала маяка-пингера, над амплитудой Ux гармонических колебаний посылки - около 20 дБ.
- превышение среднеквадратического отклонения σm квазибелого шума, маскирующего навигационную посылку сигнала маяка-пингера, над фоновыми шумами σξ среды акватории поиска - около 30 дБ.
Превышение средних амплитуд Ub, Uj, Us импульсов посылок опознавания сигналов активации, всплытия поискового судна и маяка-пингера автономного донного подводного объекта над фоновыми шумами σξ акватории поиска, достаточное для их достоверного приема, должно быть в пределах 20 дБ. Этот параметр относится к категории априорно неподконтрольных, поскольку в значительной степени зависит от излучаемой с объектов взаимодействия акустической мощности сигналов, частоты импульсов посылок опознавания, фоновых шумов акватории и наклонного расстояния от поискового судна до автономного донного подводного объекта при их акустическом контакте.
Характеристики приемного и передающего оборудования поискового судна и автономного донного подводного объекта, достаточные для получения указанных параметров принимаемых сигналов с учетом возможной энергетики гидроакустического канала, приведены при рассмотрении технической реализации заявляемого способа.
Спектральный анализ сонограмм записей звуков морских животных, рыб, ракообразных и шумов моря различных акваторий, имеющихся в распоряжении авторов заявляемого способа, показал следующее:
- импульсные фрагменты сонограмм записей звуков морских животных, рыб, ракообразных, которые могут быть использованы для формирования излучаемых сигналов поискового судна и автономного донного подводного объекта в процессе поиска, имеют преобладающий частотный диапазон колебаний от 100 Гц до 8 кГц;
- фрагменты сонограмм записей шумов мелкого моря обладают преимущественно частотным диапазоном колебаний от 20 Гц до 20 кГц;
- во фрагментах сонограмм записей шумов глубокого моря превалирует частотный диапазон колебаний от 500 Гц до 20 кГц.
Указанные частотные диапазоны, определяющие возможные частотные спектры излучаемых в процессе поиска сигналов, позволяют оценить максимально необходимые полосы пропускания приемных и передающих трактов оборудования взаимодействующих объектов:
- полосы пропускания приемного тракта автономного донного подводного объекта и передающего тракта поискового судна - около 8 кГц;
- полосы пропускания передающего тракта автономного донного подводного объекта и приемных пеленгационных трактов поискового судна - около 20 кГц.
Для приемлемой технической реализации заявляемого способа и получения необходимой точности определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, можно рекомендовать следующие соотношения частотных параметров сигнала навигационной посылки и квазибелого маскирующего шума в процессе передачи и приема комбинированного сигнала маяка-пингера:
- частоту ƒ0 гармонических колебаний навигационной посылки выбирают из условий приемлемых габаритных размеров пеленгационной антенны поискового судна и ее конструктивного размещения на судне с соблюдением требования:  , где cmin - минимально возможная скорость распространения звука в морской среде, А - расстояние между парами гидрофонов антенны в горизонтальной плоскости, - рекомендуемые значения частот - в пределах 2-4 кГц;
, где cmin - минимально возможная скорость распространения звука в морской среде, А - расстояние между парами гидрофонов антенны в горизонтальной плоскости, - рекомендуемые значения частот - в пределах 2-4 кГц;
- частотные параметры квазибелого шума, маскирующего навигационную посылку сигнала маяка-пингера, выбирают, исходя из необходимой точности определения угловых координат автономного донного подводного объекта в процессе его гидроакустического поиска, задавая превышение нижней граничной частоты его спектра Fшн над частотой ƒ0 гармонических колебаний навигационной посылки не менее 5 раз, а верхнюю граничную частоту Fшв спектра шума согласовывают с верхней границей полосы пропускания передающего тракта автономного донного подводного объекта.
На фиг. 5 и фиг. 6а показаны примеры фрагментов сонограмм записей возможных акустических шумов морской акватории поиска, ограниченных диапазоном частот от 100 Гц до 8 кГц. На фиг. 5а - фрагмент записи звуков морских львов длительностью 5.5 с. На фиг. 5б - фрагмент записи звуков морских котиков длительностью 5 с. На фиг. 5в - фрагмент записи звуков китов длительностью 12 с. На фиг. 5г - фрагмент записи звуков рыб горбылей длительностью 4.5 с. На фиг. 6а - фрагмент записи звуков рыб барабанщиков длительностью 2.5 с.
На фиг. 6б и фиг. 6в представлены примеры фрагментов сонограмм записей шумов глубокого и мелкого моря соответственно, ограниченных диапазоном частот от 100 Гц до 20 кГц, с длительностью фрагментов 2.2 с.
На фиг. 6г приведена видоизмененная структура сигналов судового эхолота с импульсами, акустически окрашенными под звуки рыб, морских котиков и китов.
На фиг. 7 представлен пример возможного ансамбля из четырех комбинированных сигналов маяка-пингера автономного донного подводного объекта, сформированных на основе вышеуказанных сонограмм записей: а) рыб барабанщиков, китов и шумов глубокого моря (два импульса на посылке опознавания); б) рыб барабанщиков, морских котиков и шумов глубокого моря (четыре импульса на посылке опознавания); в) рыб барабанщиков, морских львов и шумов глубокого моря (пять импульсов на посылке опознавания); г) рыб барабанщиков, рыб горбылей и шумов глубокого моря (девять импульсов на посылке опознавания). Сигналы ансамбля имеют следующие временные параметры: общая длительность сигнала 2.22 с, длительность посылки опознавания 2 с, длительность навигационной посылки 0.2 с, длительность стартовой посылки 0.02 с. Превышения амплитуд стартовых импульсов над средними амплитудами импульсов посылок опознавания и средними амплитудами зашумленных квазибелым шумом гармонических навигационных посылок в сигналах ансамбля составляют около 12 дБ.
Для реализации заявляемого способа поисковое судно и автономный донный подводный объект оснащают соответствующим оборудованием.
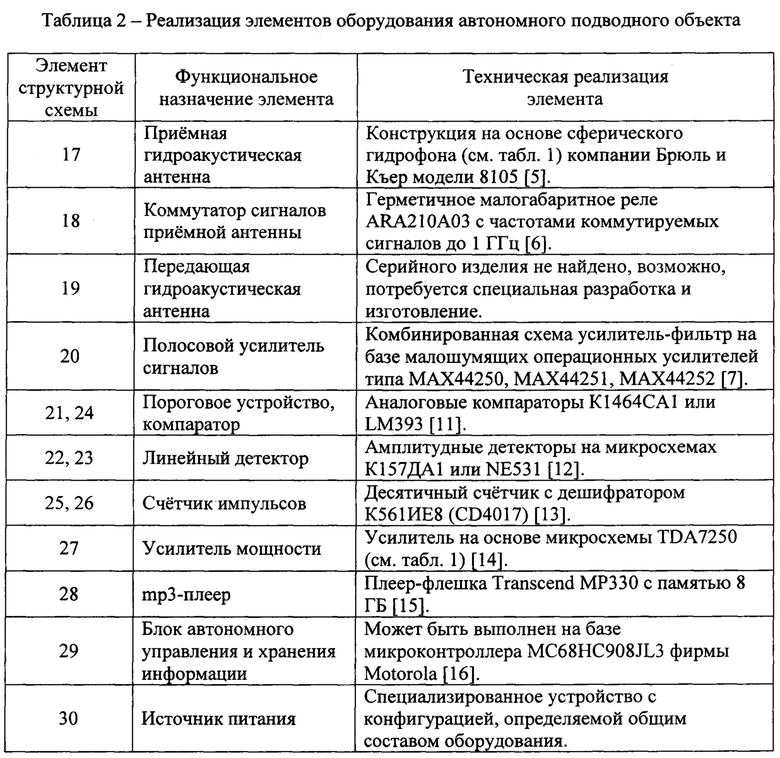
На фиг. 8 приведен пример укрупненной структурной схемы оборудования поискового судна, где обозначены: пеленгационная гидроакустическая антенна (ПГА); блок цифровой обработки сигналов (ЦОС); блок опознавания сигналов маяка-пингера (ОСМП); блок формирования излучаемых сигналов (ФИС); 1 - гидрофоны пеленгационной гидроакустической антенны; 2, 3 - коммутаторы сигналов пеленгационной антенны; 4 - полосовые усилители сигналов; 5 - аналого-цифровые преобразователи; 6 - вычислитель; 7 - блок вспомогательных гармонических сигналов с высокостабильным опорным генератором; 8 - блок централизованного управления, хранения и отображения информации; 9 - пороговое устройство; 10 - первый линейный детектор; 11 - второй линейный детектор; 12 - компаратор; 13 - счетчик импульсов; 14 - слабонаправленная передающая гидроакустическая антенна; 15 - усилитель мощности; 16 - mp3-плеер.
На фиг. 9 представлен пример укрупненной структурной схемы оборудования автономного донного подводного объекта, где обозначены: блок опознавания сигналов активации и всплытия поискового судна (ОСАВ); блок формирования комбинированных сигналов маяка-пингера (ФКСМП); 17 - слабонаправленная приемная гидроакустическая антенна; 18 - коммутатор сигналов приемной антенны; 19 - слабонаправленная передающая гидроакустическая антенна; 20 - полосовой усилитель сигналов; 21 - пороговое устройство; 22 - первый линейный детектор; 23 - второй линейный детектор; 24 - компаратор; 25 - счетчик импульсов сигнала активации; 26 - счетчик импульсов сигнала всплытия; 27 - усилитель мощности; 28 - mp3-плеер; 29 - блок автономного управления и хранения информации с высокостабильным опорным генератором; 30 - источник питания.
Сущность и пример технической реализации заявляемого способа предполагают выполнение определенных действий, процедур и операций, которые целесообразно разделить на следующие этапы.
1. На поисковом судне, при подготовке миссии автономного подводного объекта, устанавливают оборудование, показанное на фиг. 8. В исходном состоянии выходы гидрофонов 1 четырехэлементной ПГА соединены через коммутаторы 2 и 3 сигналов пеленгационной антенны с входами полосовых 4 усилителей сигналов.
Четырехэлементную ПГА реализуют на основе геометрии прямого параллелепипеда с основаниями, имеющими форму квадрата, с попарным размещением гидрофонов в геометрических точках пространства, соответствующих противоположным вершинам верхнего и нижнего оснований, обеспечивая пространственную перпендикулярность линий, соединяющих пары гидрофонов верхнего и нижнего оснований, при этом вертикальная ось антенны проходит через точки пересечения диагоналей оснований, длину диагоналей оснований параллелепипеда (расстояние между парами гидрофонов антенны в горизонтальной плоскости) выбирают из условий судового конструктивного размещения антенны, а высоту параллелепипеда (расстояние между парами гидрофонов антенны в вертикальной плоскости) уменьшают в два раза относительно длины выбранных диагоналей оснований.
Пример размещения гидрофонов ПГА в декартовой системе координат показан на фиг. 10, где Г1(х1,у1,z1), Г2(х2,y2,z2), Г3(х3,у3,z3), Г4(х4,у4,z4) - координаты гидрофонов; А - расстояние между парами гидрофонов антенны в горизонтальной плоскости; В - расстояние между парами гидрофонов антенны в вертикальной плоскости; ϕ, θ - области пеленгов и углов места автономного донного подводного объекта соответственно. Пространством приема представленной геометрии антенны считается область нижнего полупространства, ограниченная координатными полуосями X,-X,Y,-Y,-Z.
Соотношение горизонтального и вертикального размеров пеленгационной антенны диаметрально-ортогональной геометрии выбирают с учетом минимизации общих габаритов антенны в условиях судовой эксплуатации и уменьшения аппаратно-программных затрат при определении угловых координат автономного донного подводного объекта относительно поискового судна. При этом контролируют выполнение условия фазового соответствия:  , где cmin - минимально возможная скорость распространения звука в морской среде, ƒ0 - частота гармонических колебаний навигационной посылки. Один из вариантов возможных размеров ПГА шахтного (колодезного) спуска представлен на фиг. 11, который использован для количественной оценки точности позиционирования подводного объекта в заявляемом способе. При установке антенны согласовывают систему координат ПГА с курсом судна.
, где cmin - минимально возможная скорость распространения звука в морской среде, ƒ0 - частота гармонических колебаний навигационной посылки. Один из вариантов возможных размеров ПГА шахтного (колодезного) спуска представлен на фиг. 11, который использован для количественной оценки точности позиционирования подводного объекта в заявляемом способе. При установке антенны согласовывают систему координат ПГА с курсом судна.
Синтезируют в формате mp3 из импульсных фрагментов сонограмм записей звуков морских животных, рыб, ракообразных ансамбль сигналов активации a(t) с выбранными амплитудными параметрами, частотным спектром, длительностью посылки опознавания Δτ2 и заносят в память mp3-плеера 16 блока ФИС.
Синтезируют в формате mp3 из импульсных фрагментов сонограмм записей звуков морских животных, рыб, ракообразных сигнал всплытия e(t) с выбранными амплитудными параметрами, частотным спектром, длительностью посылки опознавания Δτ4 и также заносят в память mp3-плеера 16 блока ФИС.
В память блока 8 централизованного управления заносят данные о числе различающихся в ансамбле комбинированных сигналов z(t) маяка-пингера, сформированных на автономном донном подводном объекте, и количестве импульсов на выбранной длительности Δτ6 посылки опознавания каждого сигнала ансамбля.
Используя штатное оборудование эхолота поискового судна, связанное с вычислителем 6 и блоком 8 централизованного управления, видоизменяют состав и структуру зондирующих импульсов судового эхолота на основе соответствующих импульсных фрагментов сонограмм записей звуков морских животных, рыб, ракообразных таким образом, чтобы их количество и внутриимпульсная окраска соответствовали возможному гибридному шумовому фону морской среды, а интервалы следования импульсов задают, исходя из априорно известной или предполагаемой максимальной глубины акватории поиска, при этом количество зондирующих импульсов эхолота на интервале времени равном длительности сигнала всплытия не должно совпадать с общим числом импульсов в сигнале всплытия.
2. Оснащают, при подготовке миссии, автономный подводный объект оборудованием, представленным на фиг. 9. Выполняют инициализацию программных средств блока 29 автономного управления, имеющего в своем составе высокостабильный опорный генератор. В исходном состоянии выход слабонаправленной приемной гидроакустической антенны 17 соединен через коммутатор 18 сигналов приемной антенны с входом полосового 20 усилителя сигналов.
Синтезируют в формате mp3 из импульсных фрагментов сонограмм записей звуков морских животных, рыб, ракообразных, а также шумов морской среды ансамбль комбинированных сигналов z(t) маяка-пингера с выбранными амплитудными параметрами, частотным спектром, длительностью посылки опознавания Δτ6 и заносят в память mp3-плеера 28 блока ФКСМП.
В память блока 29 автономного управления заносят данные о числе различающихся в ансамбле сигналов активации a(t), сформированных на поисковом судне, и количестве импульсов на выбранной длительности Δτ2 посылки опознавания каждого сигнала ансамбля.
В память блока 29 автономного управления также заносят данные о длительности посылки опознавания Δτ4 сигнала всплытия e(t), сформированного на поисковом судне, и количестве импульсов на этой посылке.
3. Осуществляют перед поиском процедуру калибровки усилительных трактов четырехэлементной ПГА поискового судна, которая предполагает выполнение следующих действий и операций.
По команде из блока 8 централизованного управления коммутаторами 2 отключают выходы гидрофонов 1 четырехэлементной ПГА от входов полосовых 4 усилителей. Через коммутаторы 3 сигналов пеленгационной антенны на входы полосовых 4 усилителей сигналов подают из блока 7 вспомогательных гармонических сигналов, с высокостабильным опорным генератором, непрерывный гармонический сигнал uк(t) известной на поисковом судне частоты ƒ0 сигнала навигационной посылки маяка-пингера автономного донного подводного объекта с большим отношением сигнал/шум:

где Uк, ϕк - амплитуда и начальная фаза колебаний калибровочного сигнала.
После усиления и фильтрации полосовыми 4 усилителями сигналы в каждом приемном тракте описываются следующими зависимостями:
где χ1, χ2, χ3, χ4 - параметры, учитывающие коэффициенты усиления полосовых 4 усилителей; ν1, ν2, ν3, ν4 - фазовые сдвиги, обусловленные разбросом фазочастотных характеристик этих усилителей.
Сигналы H1(t), H2(t), H3(t), H4(t) подвергают посредством аналого-цифровых 5 преобразователей, с соответствующим управлением из блока 8 централизованного управления, синхронной дискретизации с кратным четырем количеством отсчетов k на периоде колебаний и общим числом отсчетов L в выборке.
В память вычислителя 6 заносят четыре массива Н1(n), Н2(n), Н3(n), Н4(n) выборок сигналов:

где n - порядковый номер отсчета в выборке, а параметры k и L, связаны соотношениями: L=1.25k, k>3⋅103.
Далее в вычислителе 6, под управлением блока 8 централизованного управления, выполняют следующие программные операции.
Осуществляют нормирование отсчетов массивов Н1(n), Н2(n), Н3(n), Н4(n) выборок сигналов путем их представления своими знаками по правилу:
Вычисляют и запоминают вспомогательные корреляционные параметры β1, γ1, β2, γ2, β3, γ3:
Рассчитывают и запоминают разности фаз ΔΨ12, ΔΨ13, ΔΨ14, колебаний калибровочного сигнала uк(t) на выходах трех пар полосовых 4 усилителей сигналов пеленгационной антенны, являющиеся калибровочными поправками:
После завершения процедуры калибровки усилительных трактов выходы гидрофонов 1 ПГА вновь подключают к входам полосовых 4 усилителей сигналов.
4. При движении поискового судна по акватории поиска, по командам из блока 8 централизованного управления, поступающим в mp3-плеер 16 блока ФИС, связанный с усилителем 15 мощности, подключенным к слабонаправленной передающей гидроакустической антенне 14, излучают в водную среду пространства нижней полусферы, относительно поискового судна, ансамбль сформированных на этапе 1 гидроакустических сигналов активации a(t) автономного донного подводного объекта со случайным чередованием излучаемых сигналов ансамбля и случайно изменяющимся интервалом ТА их повторения, превышающих фоновые шумы акватории поиска, при этом на время излучения каждого сигнала ансамбля выходы гидрофонов 1 ПГА отключают с помощью коммутаторов 2 сигналов пеленгационной антенны от входов полосовых 4 усилителей сигналов.
5. При входе поискового судна в зону акустического контакта с автономным донным подводным объектом и достоверном приеме на автономном донном подводном объекте одного из сигналов, излучаемого поисковым судном ансамбля сигналов активации a(t), переводят соответствующее оборудование автономного донного подводного объекта из спящего в рабочий режим.
Прием и обработку сигналов активации на автономном донном подводном объекте осуществляют посредством слабонаправленной приемной гидроакустической антенны 17 и устройств блока ОСАВ под управлением блока 29 автономного управления. Для этого:
- полосовым усилителем 20 доводят уровень принимаемых антенной 17 сигналов до величины, необходимой для функционирования остальных устройств блока ОСАВ;
- с помощью порогового устройства 21 фиксируют появление стартовой посылки q(t1) сигнала активации и запускают счетчики импульсов 25 и 26;
- линейными детекторами 22 и 23, имеющими существенно разные постоянные времени цепей интегрирования, осуществляют формирование порогового уровня обнаружения принимаемых сигналов и выделение огибающих импульсов сигнала активации на посылке опознавания b(t2) для последующего получения последовательности импульсов с уровнями цифровой логики при помощи компаратора 24.
Поскольку в памяти блока 29 автономного управления имеются необходимые данные о разрешенных для приема сигналах a(t) активации: числе различающихся в ансамбле сигналов, количестве импульсов на выбранной длительности Δτ2 посылки опознавания каждого сигнала ансамбля (см. этап 2), то при совпадении количества импульсов, подсчитанных счетчиком 25 на известной длительности посылки опознавания, с количеством импульсов на посылке опознавания одного из разрешенных для приема сигналов, принимают решение о приеме сигнала активации.
После этого по команде из блока 29 автономного управления переводят источник 30 питания в рабочий режим подачи питающих напряжений на активируемые устройства блока ФКСМП.
6. Затем по командам из блока 29 автономного управления подводного объекта, поступающим в mp3-плеер 28 блока ФКСМП, связанный с усилителем 27 мощности, подключенным к слабонаправленной передающей гидроакустической антенне 19, излучают в водную среду пространства верхней полусферы, относительно морского дна, ансамбль сформированных на этапе 2 комбинированных сигналов z(t) маяка-пингера со случайным чередованием излучаемых сигналов ансамбля и случайно изменяющимся интервалом ТМ их повторения, превышающих фоновые шумы акватории поиска, при этом на время излучения каждого сигнала ансамбля выход гидрофона слабонаправленной приемной гидроакустической антенны 17 отключают с помощью коммутатора 18 сигналов приемной антенны от входа полосового 20 усилителя сигналов.
7. Принимают гидрофонами 1 ПГА поискового судна комбинированные сигналы z(t) маяка-пингера, излученные с автономного донного подводного объекта на этапе 6, осуществляют опознавание сигналов ансамбля путем обработки в блоке ОСМП, подключенном к выходу полосового 4 усилителя сигналов одного из гидрофонов ПГА. После первого достоверного приема посылки опознавания s(t2) одного из излучаемых сигналов ансамбля прекращают излучение сигналов активации a(t) с поискового судна.
Принцип приема посылок опознавания ансамбля сигналов z(t) маяка-пингера на поисковом судне и функциональный состав необходимого для этого оборудования аналогичны алгоритмическим и аппаратным атрибутам, используемым в процессе обработки ансамбля сигналов активации a(t) на автономном донном подводном объекте этапа 5. Для этого под управлением блока 8 централизованного управления:
- фиксируют с помощью порогового устройства 9 появление стартовой посылки y(t) сигнала z(t) и запускают счетчик импульсов 13;
- осуществляют линейными детекторами 10 и 11, имеющими существенно разные постоянные времени цепей интегрирования, формирование порогового уровня обнаружения принимаемых сигналов и выделение огибающих импульсов сигнала z(t) на посылке опознавания для последующего получения последовательности импульсов с уровнями цифровой логики при помощи компаратора 12;
- принимают решение о приеме сигнала z(t) при совпадении количества импульсов, подсчитанных счетчиком 13 на известной длительности посылки опознавания, с количеством импульсов на посылке опознавания одного из разрешенных для приема сигналов ансамбля.
8. Осуществляют процедуру определения угловых координат автономного донного подводного объекта относительно поискового судна, в которой вычисляют и запоминают пеленг ϕ и угол места θ подводного объекта в согласованной с направлением движения поискового судна системе координат судовой пеленгационной антенны. Указанная процедура согласована с геометрическими параметрами пеленгационной антенны, позволяет осуществлять позиционирование автономного донного подводного объекта относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/шум замаскированного навигационного сигнала и включает в себя следующие действия и операции.
Формируют в блоке 7 вспомогательных гармонических сигналов, на базе высокостабильного опорного генератора, квадратурные составляющие Y1(t), Y2(t) гармонического сигнала Y(t) частоты ƒ0, характеризующиеся большими отношениями сигнал/шум.
После достоверного приема посылки опознавания s(t2) одного из сигналов z(t) ансамбля маяка-пингера автономного донного подводного объекта, сигналы u1(t), u2(t), u3(t), u4(t), Y1(t), Y2(t) посредством аналого-цифровых 5 преобразователей, с соответствующим управлением из блока 8 централизованного управления, подвергают на интервале времени t3∈[τ9…τ10] гармонической навигационной посылки x(t3) синхронной дискретизации с кратным четырем количеством отсчетов k на периоде колебаний и общим числом отсчетов L в выборке.
В память вычислителя 6 заносят шесть массивов u1(n), u2(n), u3(n), u4(n), Y1(n), Y2(n) выборок сигналов:

где n - порядковый номер отсчета в выборке, а параметры k и L связаны соотношениями: L=100k, k>3⋅103.
Далее в вычислителе 6, под управлением блока 8 централизованного управления, выполняют следующие программные операции.
Вычисляют и запоминают весовые коэффициенты W1 и W2, определяющие проекции сигнала u1(t) на квадратурные составляющие сигнала Y(t):
Вычисляют и запоминают весовые коэффициенты W3 и W4, определяющие проекции сигнала u2(t) на квадратурные составляющие сигнала Y(t):
Вычисляют и запоминают весовые коэффициенты W5 и W6, определяющие проекции сигнала u3(t) на квадратурные составляющие сигнала Y(t):
Вычисляют и запоминают весовые коэффициенты W7 и W8, определяющие проекции сигнала u4(t) на квадратурные составляющие сигнала Y(t):
Выполнение операций (14) - (17) позволяет находить проекции сигналов u1(t), u2(t), u3(t), u4(t) (на интервале времени гармонической навигационной посылки) с малыми отношениями сигнал/маскирующий шум на квадратурные составляющие Y1(t) и Y2(t) гармонического сигнала Y(t), имеющие большие отношения сигнал/шум.
Указанные проекции необходимы для получения четырех гармонических сигналов с большими отношениями сигнал/шум, синфазных с сигналами u1(t), u2(t), u3(t), u4(t), имеющими малые отношения сигнал/шум, которые используются в дальнейших вычислениях для значительного повышения точности измерений разностей фаз колебаний посылки навигационного сигнала x(t3) на выходах трех пар гидрофонов пеленгационной антенны поискового судна и обеспечения необходимой точности определения угловых координат автономного донного подводного объекта относительно поискового судна в условиях малых отношений сигнал/шум на интервале замаскированной навигационной посылки комбинированного сигнала маяка-пингера.
Достаточная для получения малой погрешности измерений разностей фаз точность синфазирования достигается за счет корреляционной обработки сигналов низкой частоты навигационной посылки на фоне более высокочастотных квазибелых шумов, что позволяет реализовать эффективное когерентное накопление, хорошо известное в теории помехоустойчивой обработки сигналов [4].
Формируют и запоминают четыре массива R1(n), R2(n), R3(n), R4(n) выборок отсчетов, принадлежащих сигналам блока 7 вспомогательных гармонических сигналов, синфазным с сигналами u1(t), u2(t), u3(t), u4(t) соответственно, и имеющим в результате операций синфазирования большие отношения сигнал/шум:

Осуществляют нормирование отсчетов массивов R1(n), R2(n), R3(n), R4(n) выборок сигналов путем их представления своими знаками по правилу:
Вычисляют и запоминают вспомогательные корреляционные параметры β1, γ1, β2, γ2, β3, γ3:
Рассчитывают и запоминают разности фаз гармонических колебаний Δφ12, Δφ13, Δφ14 посылки навигационного сигнала x(t3) на выходах трех пар гидрофонов (Г1-Г2, Г1-Г3, Г1-Г4) пеленгационной антенны (фиг. 10) поискового судна:
Уточняют и запоминают значения разностей фаз Δψ12, Δψ13, Δψ14 колебаний гармонического сигнала навигационной посылки комбинированного сигнала маяка-пингера автономного донного подводного объекта на выходах трех пар гидрофонов пеленгационной антенны поискового судна с учетом калибровочных поправок ΔΨ12, ΔΨ13, ΔΨ14, вычисленных в процедуре калибровки усилительных трактов пеленгационной антенны:

Вычисляют и запоминают пеленг ϕ (относительно курса поискового судна) и угол места θ (относительно уровня водной поверхности при вертикальной стабилизации пеленгационной антенны поискового судна) автономного донного подводного объекта по следующим тригонометрическим формулам:

Формулы (23) и (24) являются частным случаем общего алгоритма позиционирования подводных объектов, разработанного авторами заявки и представленного в публикации [2].
9. По команде из блока 8 централизованного управления поискового судна измеряют судовым эхолотом с модернизированной структурой зондирующих импульсов глубину h водной акватории поиска, которую запоминают в памяти вычислителя 6. Интервалы времени между измерениями глубины зависят от профиля морского дна акватории поиска, а излучение зондирующих импульсов начинают только после приема очередного сигнала z(t) из ансамбля комбинированных сигналов маяка-пингера автономного донного подводного объекта.
10. Оценивают и запоминают в вычислителе 6 поискового судна по рассчитанному углу места θ автономного донного подводного объекта и измеренной глубине h акватории поиска приближенные значения дальности d и наклонного расстояния rн до автономного донного подводного объекта (фиг. 12), используя тригонометрические соотношения:
11. Корректируют на основании параметров местоположения ϕ, θ, d, rн автономного донного подводного объекта относительно поискового судна, обновляемых с периодичностью сигналов маяка-пингера и интервалами измерения глубины акватории поиска, курс движения поискового судна до безопасной дальности всплытия автономного донного подводного объекта - дальности, исключающей возможное столкновение при всплытии подводного объекта и поискового судна, которую оценивают с использованием измеряемых на поисковом судне глубины акватории и скорости течения, а также прогнозируемой траектории всплытия подводного объекта.
12. После приема и обработки на поисковом судне очередного сигнала z(t) из ансамбля комбинированных сигналов маяка-пингера автономного донного подводного объекта, по команде из блока 8 централизованного управления, поступающей в mp3-плеер 16 блока ФИС, связанный с усилителем 15 мощности, подключенным к слабонаправленной передающей гидроакустической антенне 14, излучают в водную среду пространства нижней полусферы, относительно поискового судна, сигнал всплытия e(t) автономного донного подводного объекта, превышающий по уровню фоновые шумы акватории поиска, при этом на время излучения сигнала выходы гидрофонов 1 ПГА отключают с помощью коммутаторов 2 сигналов пеленгационной антенны от входов полосовых 4 усилителей сигналов.
13. Прием и обработку сигнала всплытия на автономном донном подводном объекте осуществляют посредством слабонаправленной приемной гидроакустической антенны 17 и устройств блока ОСАВ под управлением блока 29 автономного управления. Для этого:
- полосовым усилителем 20 доводят уровень принимаемого антенной 17 сигнала до величины, необходимой для функционирования остальных устройств блока ОСАВ;
- с помощью порогового устройства 21 фиксируют появление стартовой посылки g(t1) сигнала всплытия и запускают счетчики импульсов 25 и 26;
- линейными детекторами 22 и 23, имеющими существенно разные постоянные времени цепей интегрирования, осуществляют формирование порогового уровня обнаружения принимаемого сигнала и выделение огибающих импульсов сигнала всплытия на посылке опознавания j(t2) для последующего получения последовательности импульсов с уровнями цифровой логики при помощи компаратора 24;
- при совпадении количества импульсов, подсчитанных счетчиком 26 на известной длительности посылки опознавания, с числом импульсов на посылке опознавания, находящимся в памяти блока 29 автономного управления (см. этап 2), принимают решение о приеме сигнала всплытия.
После этого по команде из блока 29 автономного управления запускают соответствующие исполнительные механизмы системы изменения плавучести и прекращают излучение сигнала z(t) маяка-пингера автономного донного подводного объекта.
14. Если после первого излучения поисковым судном сигнала всплытия e(t) прием сигналов z(t) маяка-пингера автономного донного подводного объекта на поисковом судне не прекращается, то осуществляют повторное излучение сигнала всплытия (см. этап 12).
При технической реализации заявляемого способа может быть использована современная элементная база и цифровые технологии обработки сигналов. Примеры возможной технической реализации функциональных элементов оборудования поискового судна и автономного подводного объекта с использованием промышленно выпускаемых изделий представлены в табл. 1 и табл. 2.
Следует отметить, что синтезирование необходимых для скрытного гидроакустического поиска сигналов поискового судна и автономного подводного объекта в виде соответствующих файлов mp3-плееров 16, 28, из имеющихся в наличии фрагментов сонограмм записей звуков фоновых шумов морской среды, может быть выполнено с использованием стандартных программных приложений AVS Audio Editor, Audio Master и Ocen Audio для операционной системы Windows.
Рассчитаем, на основе систематизированных для гидроакустического канала инженерных соотношений [17], мощность передатчика подводной линии передачи гидроакустических сигналов, необходимую для оценки возможности технической реализации передающих гидроакустических антенн 14, 19 поискового судна и автономного подводного объекта.
Мощность сигнала Рп на входе приемника при этом определяется зависимостями:

где Ри - мощность передатчика;Gп,Gи - коэффициенты направленного действия приемной и передающей антенн соответственно; ηп,ηи - коэффициенты полезного действия приемной и передающей антенн соответственно; с - скорость звука в морской воде; Sп - эффективная площадь приемной антенны; R - длина подводной линии передачи гидроакустических сигналов (наклонное расстояние между приемной и передающей антеннами); ƒ - частота излучаемого сигнала; γ - коэффициент, учитывающий потери мощности сигнала в морской среде за счет поглощения.
Мощность сигнала на входе приемника, с учетом необходимого для достоверного приема отношения h2 сигнал/шум, может быть определена по формулам:
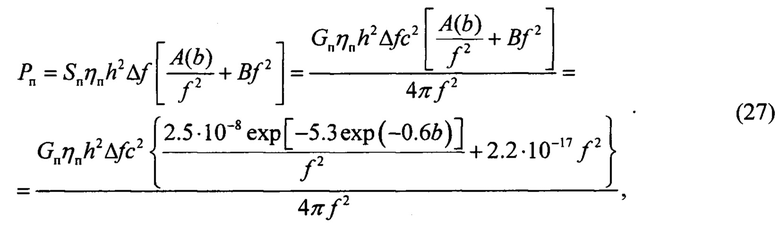
где h2 - требуемое отношение сигнал/шум на приеме; Δƒ - полоса частот приемного тракта; А(b) - коэффициент, величина которого зависит от состояния b поверхности моря в баллах; В - коэффициент, определяемый температурой морской воды.
Следует иметь в виду, что спектральная плотность Nм шумов морской среды

имеет размерность  , а шумы водной среды для частот от 8 кГц и выше обусловлены преимущественно шумами водной поверхности, зависящими от волнения моря.
, а шумы водной среды для частот от 8 кГц и выше обусловлены преимущественно шумами водной поверхности, зависящими от волнения моря.
Из соотношений (26) и (27), с учетом зависимости (28), получаем выражение для расчета необходимой мощности передатчика гидроакустических сигналов:

где размерности величин: ƒ, Δƒ - в кГц; R - в км; h2 - в дБ; Ри - в Вт.
Допустимая удельная акустическая мощность Ра, большинства используемых для изготовления гидрофонов пъезоматериалов лежит в диапазоне Ра ≈ 10-1…102 Вт/см2. Для пъезоматериалов на основе титаната бария Ра≤2 Вт/см2, а для ЦТС (цирконат-титанат свинца) материалов Ра≤15 Вт/см2 [18].
Например, для варианта возможного технологического исполнения сферического гидрофона при радиусе сферы rг=4 см активного элемента из ЦТС (Ра=10 Вт/см2) материалов допустимая акустическая мощность гидрофона в полусфере излучения может быть на уровне 1000 Вт (2⋅π⋅rг2⋅Ра=2⋅3.14⋅16⋅10=1000.5).
Однако, принимая во внимание наличие эффекта кавитации, ограничивающего акустическую мощность излучающего гидрофона, можно допустить, при пороге кавитации  [19] для самой низкой частоты спектра излучаемых сигналов, равной 100 Гц, акустическую мощность указанного излучающего гидрофона только около 30 Вт.
[19] для самой низкой частоты спектра излучаемых сигналов, равной 100 Гц, акустическую мощность указанного излучающего гидрофона только около 30 Вт.
С учетом среднестатистической эффективности пъезокерамических преобразователей, потерь при согласовании и герметизации, коэффициент полезного действия излучателя можно принять на уровне 0.6, тогда верхний предел мощности передатчика для указанного гидрофона будет составлять 50 Вт.
Для выбранной мощности Ри передатчика гидроакустических сигналов, используя формулу (29), рассчитаем длину R подводной линии передачи гидроакустических сигналов при заданных: отношении сигнал/шум h2 на приеме, частоте ƒ излучаемого сигнала, полосе частот Δƒ приемного тракта, коэффициенте направленного действия Gи передающей антенны, ее коэффициенте полезного действия ηи и состоянии b поверхности моря.
Расчеты по формуле (29), которую можно считать зависимостью первого приближения, длины R подводной линии передачи гидроакустических сигналов с приемником на поисковом судне при значениях: Ри=50 Вт, ƒ=8 кГц, Δƒ=19 кГц, h2=20 дБ, Gи=1, ηи=0.6 в зависимости от состояния b поверхности моря (по официальной шкале Всемирной Морской Организации) представлены в таблице 3.
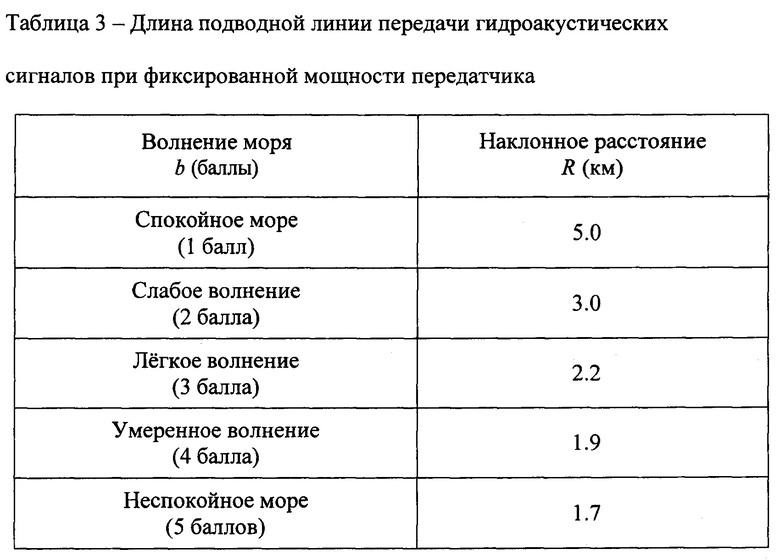
Полученные в таблице 3 значения наклонных расстояний можно использовать в качестве прогнозируемых максимально возможных наклонных расстояний rн max от поискового судна до автономного донного подводного объекта при их акустическом контакте в акватории с ожидаемым состоянием морской поверхности для расчетов минимально допустимых интервалов повторения гидроакустических сигналов активации TA поискового судна и маяка-пингера ТМ автономного донного подводного объекта на основе соотношений (6).
При известной технически реализуемой мощности гидроакустических излучателей можно также оценить и необходимую чувствительность гидроакустических приемников автономного подводного объекта и поискового судна. Оценку выполним на основе материалов классической монографии [19].
Для ненаправленного излучателя, расположенного в однородной водной среде, интенсивность звуковой волны можно записать в следующем виде

где П - среднеквадратичное давление, выраженное в Па; ρ - плотность воды, равная 103 кг/м3; с - скорость звука в воде, которую примем 1500 м/с.
Связь между указанной интенсивностью и мощностью передатчика имеет вид

где Ри - мощность передатчика; ηи - коэффициент полезного действия передающей антенны; R - длина подводной линии передачи гидроакустических сигналов.
Из соотношения (31) находим среднеквадратичное давление П:

где размерности величин: Ри - в Вт; R - в км; ρ - в кг/м3; с - в км/с.
Чувствительность приемных гидрофонов обычно выражается в мкВ/Па, тогда напряжение на выходе приемного гидрофона с чувствительностью μ будет равно

В табл. 4 приведены результаты расчетов выходного напряжения гидрофона (см. табл. 1 и табл. 2) компании Брюль и Къер модели 8105 (μ=56 мкВ/Па) при мощности передатчика 50 Вт и коэффициенте полезного действия передающей антенны ηи=0.6 для различных значений наклонного расстояния R между приемником и передатчиком.
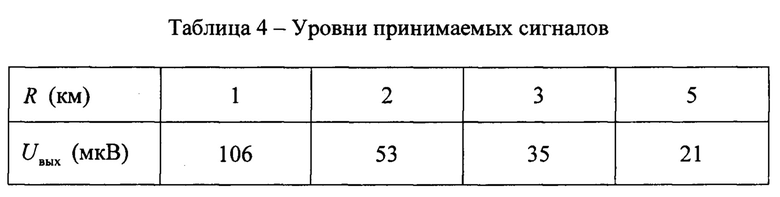
Полученные уровни сигналов на выходах приемных гидрофонов выбранной модели автономного подводного объекта и поискового судна позволяют при коэффициентах передачи полосовых 4, 20 усилителей (см. табл. 1 и табл. 2) приемных трактов порядка 2⋅104 обеспечивать типовые режимы функционирования электронных компонентов остального оборудования для указанных границ изменения наклонного расстояния в процессе поисковых действий.
Оценим точности позиционирования автономного донного подводного объекта относительно поискового судна при гидроакустическом поиске в зависимости от соотношения уровней гармонического сигнала навигационной посылки маяка-пингера и маскирующего ее квазибелого шума (отношения сигнал/шум) путем моделирования в математической среде Mathcad 15.
Исходные данные для моделирования задаем, исходя из приемлемых условий судового конструктивного размещения пеленгационной антенны, наиболее вероятных сценариев относительного позиционирования поискового судна и подводного объекта, а также необходимой точности определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска:
- частота ƒ0 гармонических колебаний в посылке x(t3) навигационного сигнала маяка-пингера автономного донного подводного объекта составляет 3 кГц;
- диапазон частот квазибелого шума, маскирующего посылку x(t3) навигационного сигнала маяка-пингера автономного донного подводного объекта, имеет нижнюю Fшн и верхнюю Fшв границы - Fшн=15 кГц, Fшв=20 кГц, полоса частот шума ΔFш=5кГц;
- границы полосы пропускания приемных трактов (полосовых 4 усилителей поискового судна) по уровню половинной мощности от 1 кГц до 20 кГц;
- Г1(0.1,0,0), Г2(-0.1,0,0), Г3(0,0.1,-0.1), Г4(0,-0.1,-0.1) - декартовы координаты гидрофонов судовой пеленгационной антенны выбранного размера (А=0.2 м, В=0.1 м), выраженные в метрах;
- диапазон изменения пеленгов автономного донного подводного объекта в процессе поиска ϕ=0°…360°;
- диапазон изменения углов места автономного донного подводного объекта в процессе поиска θ=10°…70°;
- диапазон изменения наклонных расстояний от поискового судна до автономного донного подводного объекта rн=50 м … 3000 м;
- морская акватория при акустическом контакте между поисковым судном и автономным донным подводным объектом условно разделена на ближнюю rн<100 м, θ=70° и дальнюю rн>500 м, θ=10° зоны поиска;
- маскирующий навигационную посылку m(t3) сигнала маяка-пингера квазибелый шум имеет нормальное вероятностное распределение, нулевое среднее значение и заданную дисперсию;
- оценка максимальной погрешности вычисления разностей фаз Δφ12, Δφ13, Δφ14 колебаний посылки x(t3) навигационного сигнала маяка-пингера автономного донного подводного объекта на выходах трех пар гидрофонов судовой пеленгационной антенны осуществляется методом статистических испытаний с использованием 25 независимых реализаций формируемого квазибелого шума;
- количество отсчетов k на периоде гармонических колебаний навигационной посылки и общее число отсчетов L в выборке при осуществлении процедуры определения угловых координат автономного донного подводного объекта относительно поискового судна выбраны соответственно k=3.6⋅103, L=3.6⋅105;
- относительное расхождение частот колебаний, сформированных на базе судового высокостабильного опорного генератора, и колебаний посылки принимаемого навигационного сигнала маяка-пингера выбрано равным 2⋅10-3, что соответствует варианту гидроакустического поиска с возможной радиальной скоростью движения поискового судна относительно позиционируемого автономного донного подводного объекта 3 м/с (5.84 узла).
Результаты расчетов граничных точностей позиционирования (фиг. 13 и фиг. 14) показывают, например, что для возможных в процессе гидроакустического поиска отношений сигнал/маскирующий шум на уровне минус 30 дБ, используя заявляемый способ можно осуществлять определение угловых координат ϕ и θ автономного донного подводного объекта относительно поискового судна в ближней зоне поиска с точностью не хуже 1° по пеленгу и 0.4° по углу места, а в дальней зоне поиска с большей точностью - не хуже 0.3° по пеленгу и 0.2° по углу места.
Указанных граничных точностей вполне достаточно, чтобы обеспечивать эффективный процесс скрытного гидроакустического позиционирования автономного донного подводного объекта в ходе его поиска от момента активации до всплытия, подразумевая при этом постоянную коррекцию курса поискового судна по функционально независимым оценкам параметров местоположения автономного донного подводного объекта с использованием соответствующих сигналов его маяка-пингера.
Необходимо отметить, что представленные граничные точности расчетов характеризуют максимальные из максимально возможных (maximum maximorum) погрешностей позиционирования, которые могут иметь место при таких сочетаниях значений пеленга ϕ, угла места θ автономного донного подводного объекта, максимальных погрешностей определения разностей фаз Δφ12, Δφ13, Δφ14 колебаний посылки x(t3) навигационного сигнала маяка-пингера автономного донного подводного объекта на выходах трех пар гидрофонов судовой пеленгационной антенны, а также знаков указанных погрешностей, которые приводят к наибольшим абсолютным погрешностям в операциях (23), (24) вычисления угловых координат автономного донного подводного объекта относительно поискового судна для самых наихудших условий поиска.
Если учесть, что вероятность возникновения указанных выше неблагоприятных сочетаний величин пеленга, угла места, погрешностей определения разностей фаз и знаков этих погрешностей (функциональных параметров позиционирования) в полном временном цикле осуществления реального поиска будет мала, то следует рассчитывать на преобладание в процессе поиска больших точностей позиционирования по сравнению с представленными граничными.
Тенденция увеличения точности позиционирования по мере удаления от подводного объекта положительно характеризует разработанный авторами заявки алгоритм позиционирования [2], поскольку процесс осуществления поиска начинается, как правило, с больших удалений поискового судна от автономного донного подводного объекта.
Таким образом, предлагаемое техническое решение позволяет достичь желаемого эффекта - повышения скрытности процесса гидроакустического поиска автономного донного подводного объекта с надводного поискового судна, за счет до сих пор не применявшегося сочетания: использования в процессе поисковых действий гидроакустических сигналов, маскируемых под возможные акустические фоновые шумы известной акватории поиска - звуки морских животных, рыб, ракообразных, шумы моря, выбора надлежащей структуры, амплитудных, временных и частотных параметров этих гидроакустических сигналов, выполнения процедуры определения угловых координат автономного донного подводного объекта относительно поискового судна, согласованной с геометрическими параметрами пеленгационной антенны поискового судна, которая совместно с процедурой калибровки усилительных трактов пеленгационной антенны поискового судна позволяет осуществлять позиционирование автономного донного подводного объекта относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/шум замаскированного навигационного сигнала.
Такая совокупность признаков нового технического решения отличает предлагаемый способ от известных в настоящее время способов гидроакустического позиционирования подводных объектов.
Список использованных источников
1. Гидроакустическая навигационная система с ультракороткой базой [Электронный ресурс] // URL: http://edboe.ru (дата обращения: 11.11.2019).
2. Арсентьев В.Г., Криволапов Г.И. Позиционирование объектов в гидроакустической навигационной системе с ультракороткой базой // Вестник СибГУТИ. Новосибирск, 2018, №4.
3. Патент RU 2593651, МПК G01S 15/00. Гидроакустический способ определения местоположения автономного подводного аппарата // Комаров B.C., Клюев М.С., Шрейдер А.А. - заявлено 09.06.2015, опубликовано 10.08.2016.
4. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991.
5. Сведения об изделии. Гидрофоны: типы 8101-8106 [Электронный ресурс] // URL: http://asm-tm.ru/wp-content/uploads/2014/08/8101-8106-Gidrofony-NEW-PD.pdf (дата обращения: 11.11.2019).
6. Герметичные реле с частотами коммутации до 1 ГГц [Электронный ресурс] // URL: http://www.fulcrum.ru/LineCard/Relays/PDF/RA.pdf (дата обращения: 11.11.2019).
7. Прецизионные малошумящие операционные усилители [Электронный ресурс] // URL: http://www.symmetron.ru/news/maxim-MAX44250.shtml (дата обращения: 11.11.2019).
8. Общее описание К1107ПВ2 [Электронный ресурс] // URL: http://www.chipinfo.ru/dsheets/ic/1107/pv2.html (дата обращения: 11.11.2019).
9. Евстифеев А.В. Микроконтроллеры AVR семейства Mega: руководство пользователя. М.: Издательский дом «Додэка - XXI», 2007.
10. Генератор-синтезатор частот НМ8134-3 [Электронный ресурс] // URL: https://www.eskomp.ru/UFiles/bukl/GENERATOR_HMF8.pdf (дата обращения: 11.11.2019).
11. Аналоговые компараторы [Электронный ресурс] // URL: http://www.diagram.com.ua/list/sprav/sprav148.shtml (дата обращения: 11.11.2019).
12. Амплитудные детекторы на ОУ [Электронный ресурс] // URL: http://nauchebe.net/2014/07/amplitudnye-detektory-na-ou-v-ustrojstvax-na-mikrosxemax (дата обращения: 11.11.2019).
13. Микросхема К561ИЕ8. Описание и схема включения [Электронный ресурс] // URL: http://www.joyta.ru/7402-mikrosxema-k561ie8-opisanie-i-sxema-vklyucheniya (дата обращения: 11.11.2019).
14. Усилитель на микросхеме TDA7250 [Электронный ресурс] // URL: http://www.radiomaster.net/pdf/audio/us_mos.pdf (дата обращения: 11.11.2019).
15. Портативные плееры [Электронный ресурс] // URL: https://headphonesbest.ru/portativnyj-pleer/14941top-15-luchshix-portativnyx-mp3-pleerov.html (дата обращения: 11.11.2019).
16. Микроконтроллеры MC68HC908JL3/JK3/JK1 [Электронный ресурс] // URL: http://www.compitech.ru/html.cgi/arhiv/02_06/stat_92.htm (дата обращения: 11.11.2019).
17. Пенин П.И. Системы передачи цифровой информации. Учебное пособие для вузов. М.: Сов. Радио, 1976.
18. Богородский В.В., Зубарев Л.А., Корепин Е.А., Якушев В.И. Подводные электроакустические преобразователи. Расчет и проектирование. Л.: Судостроение, 1983.
19. Роберт Дж. Урик. Основы гидроакустики. Пер. с англ. Л.: Судостроение, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
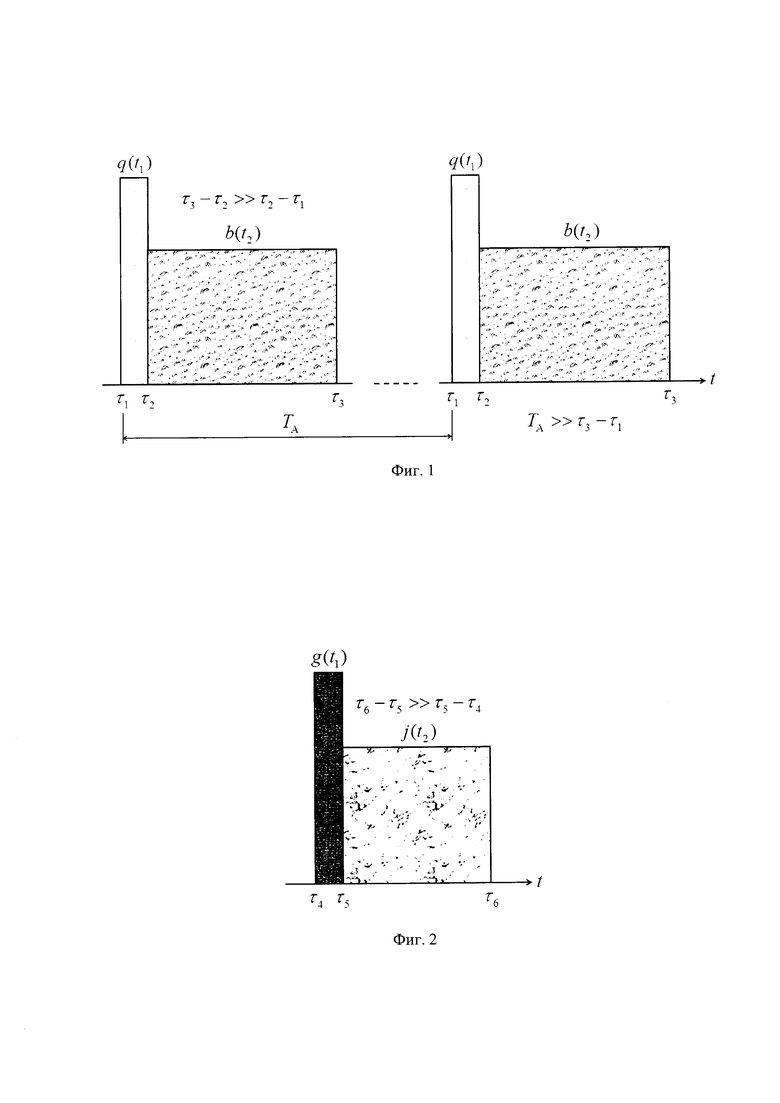

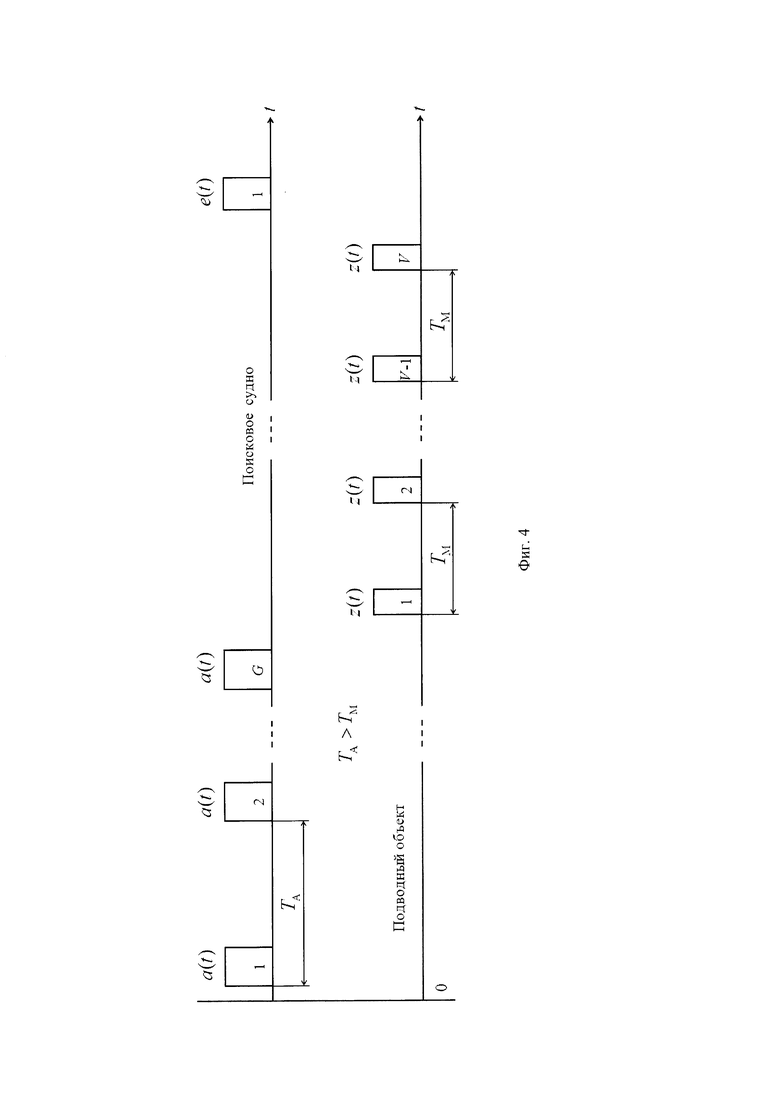
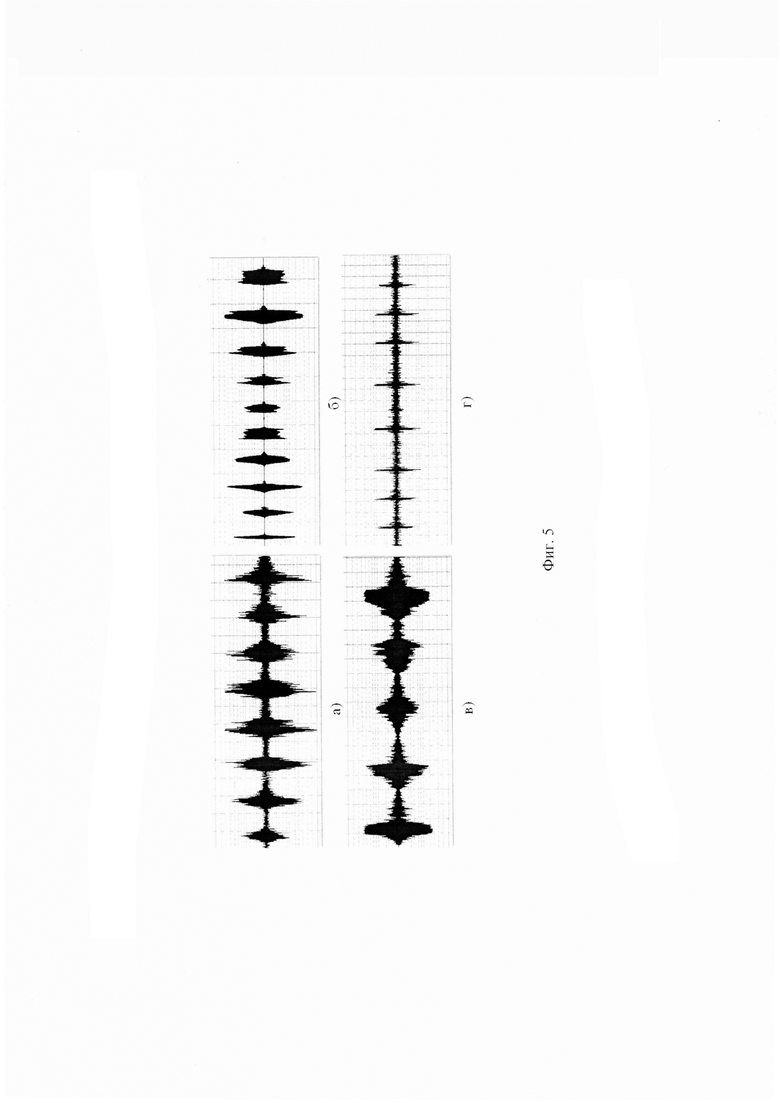
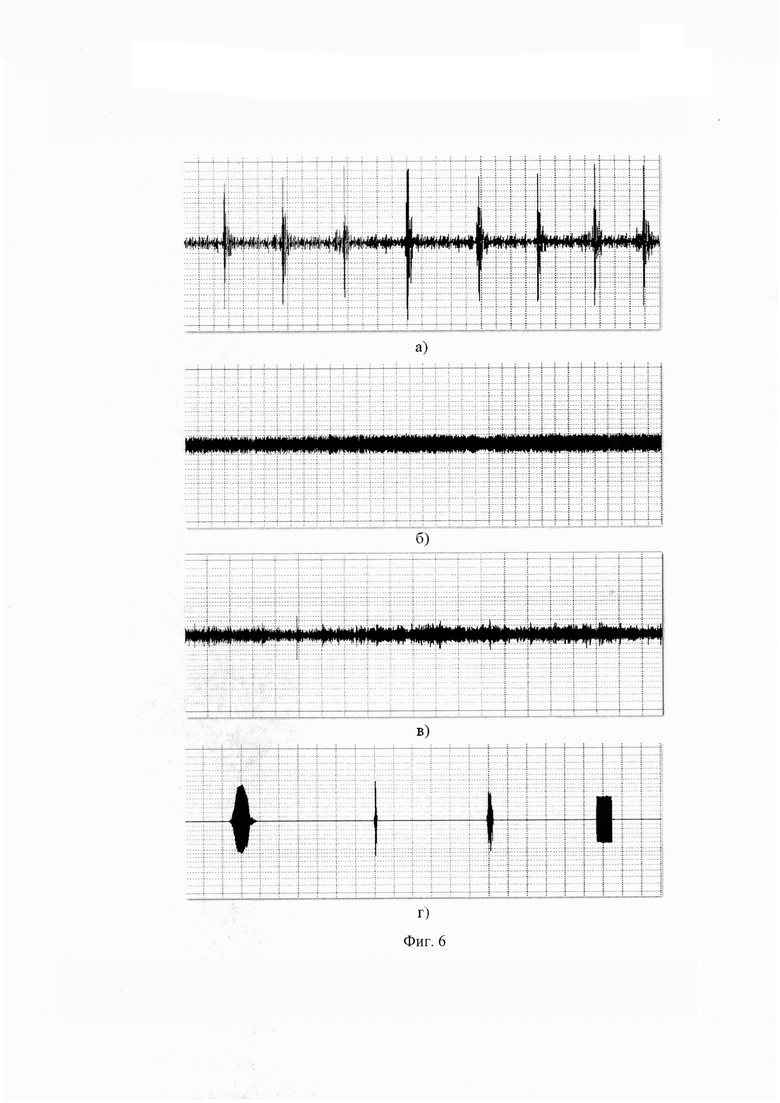
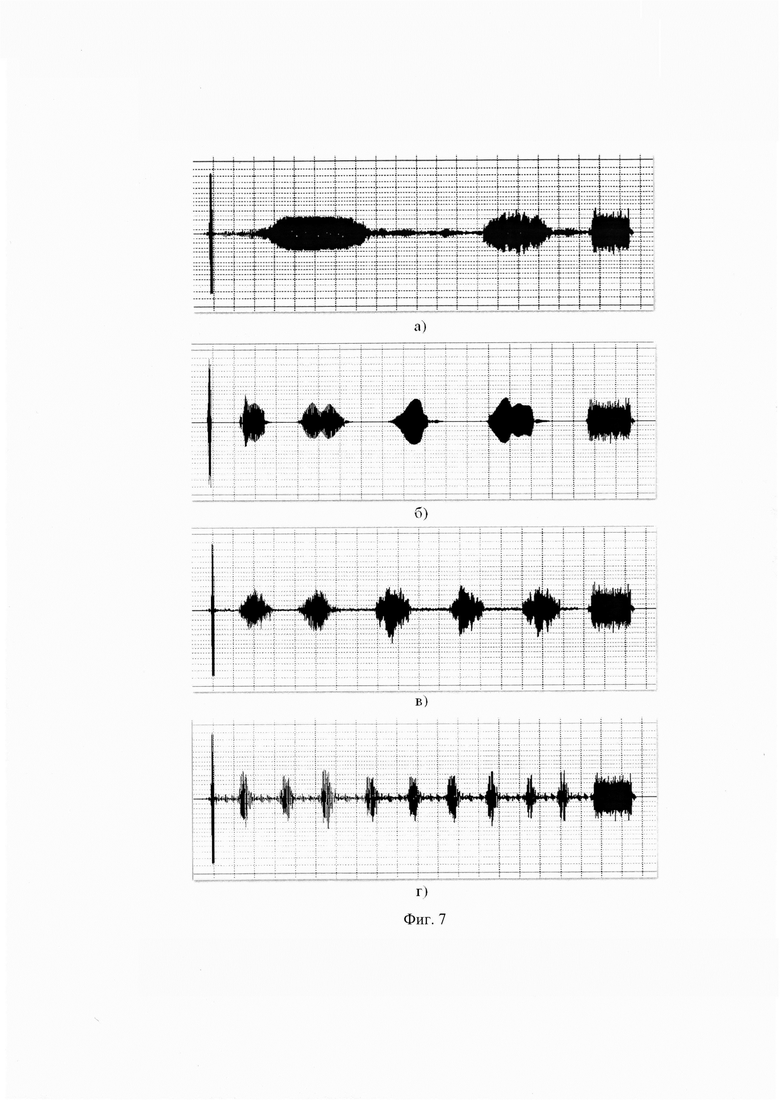

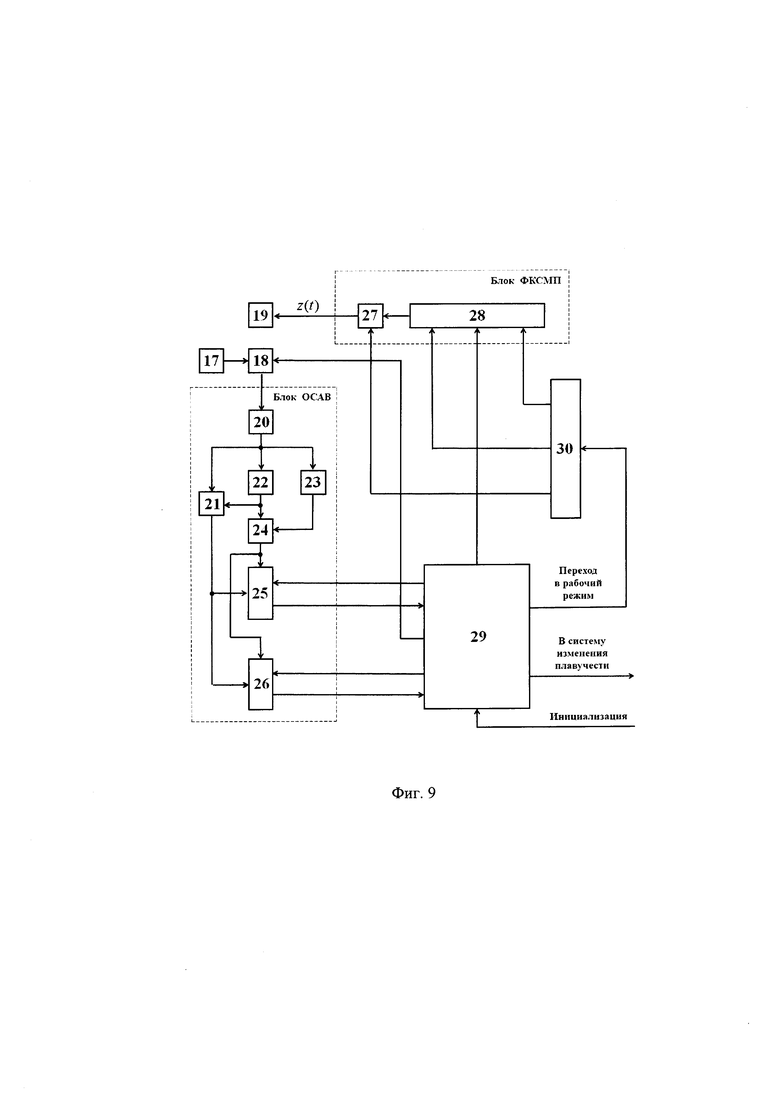
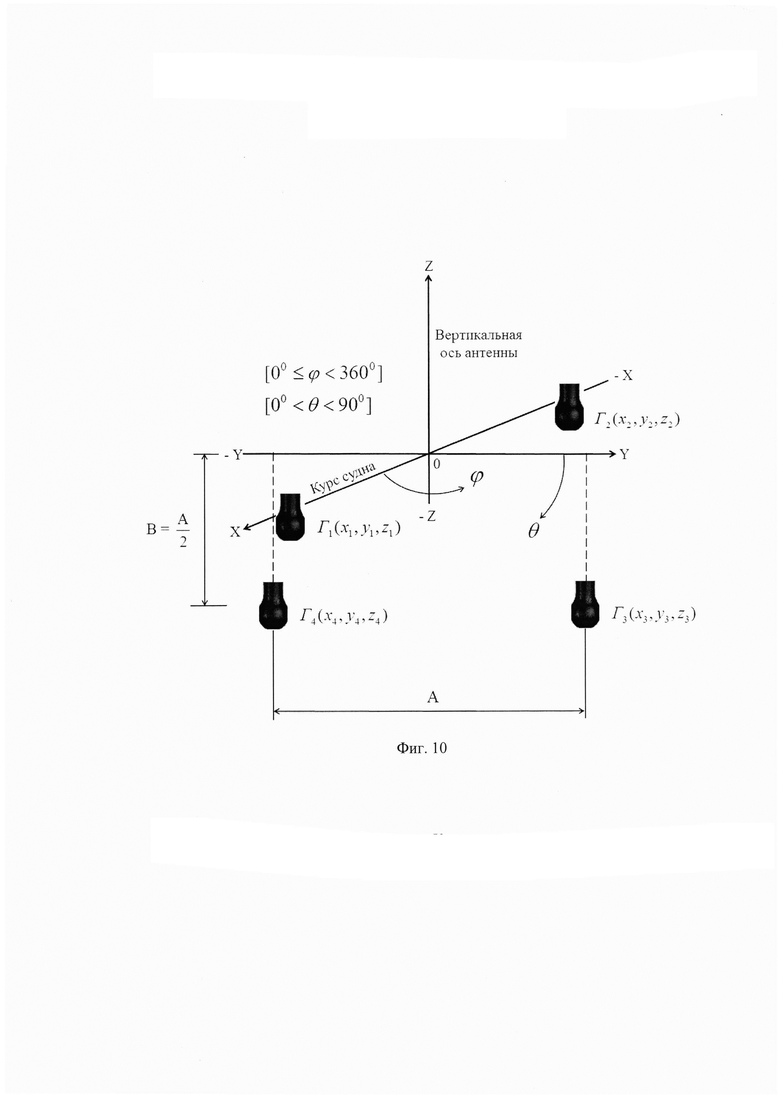
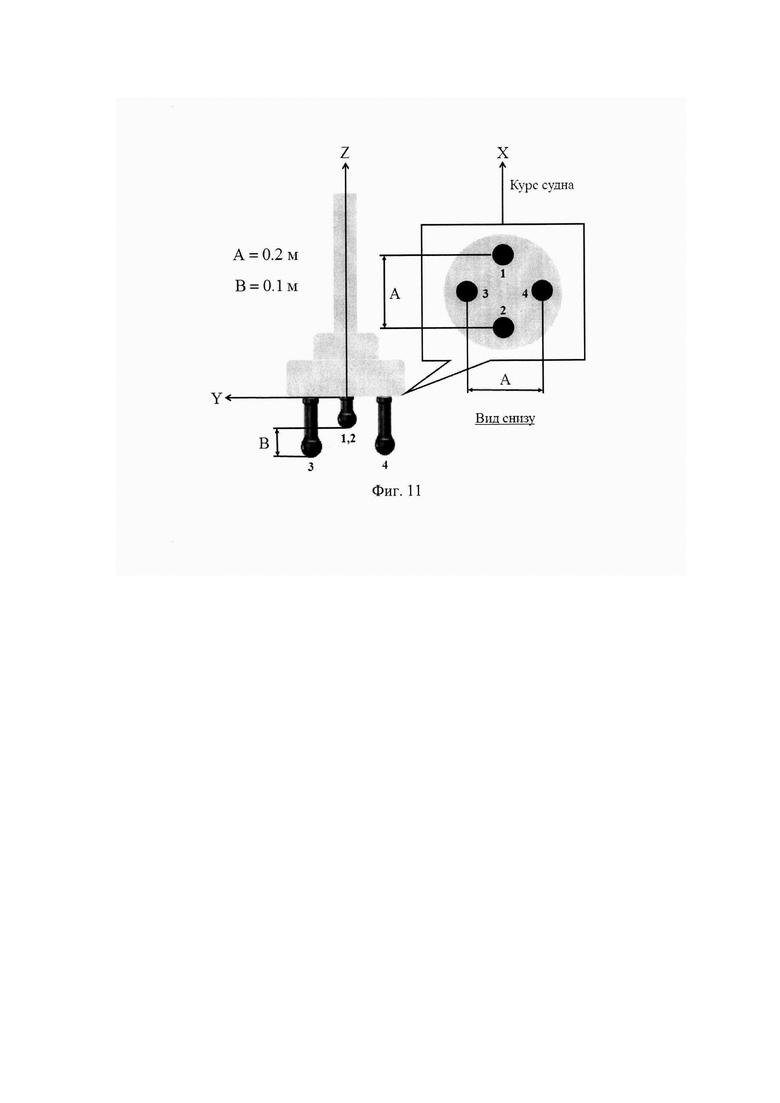
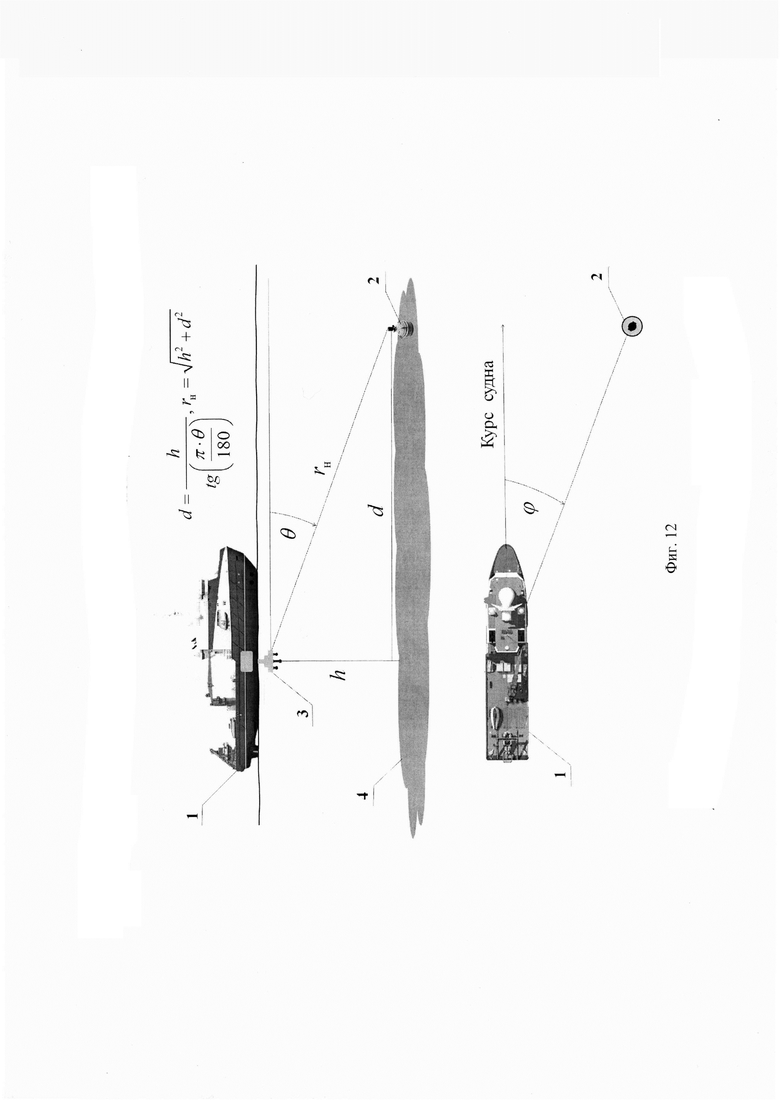
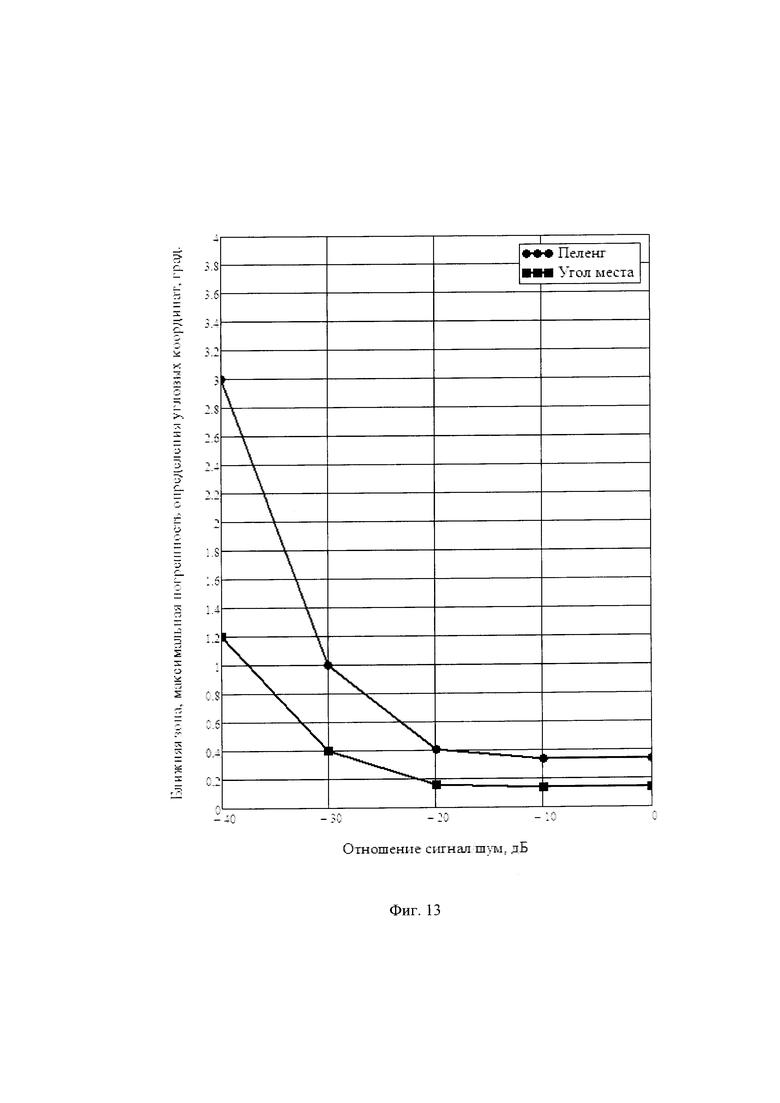
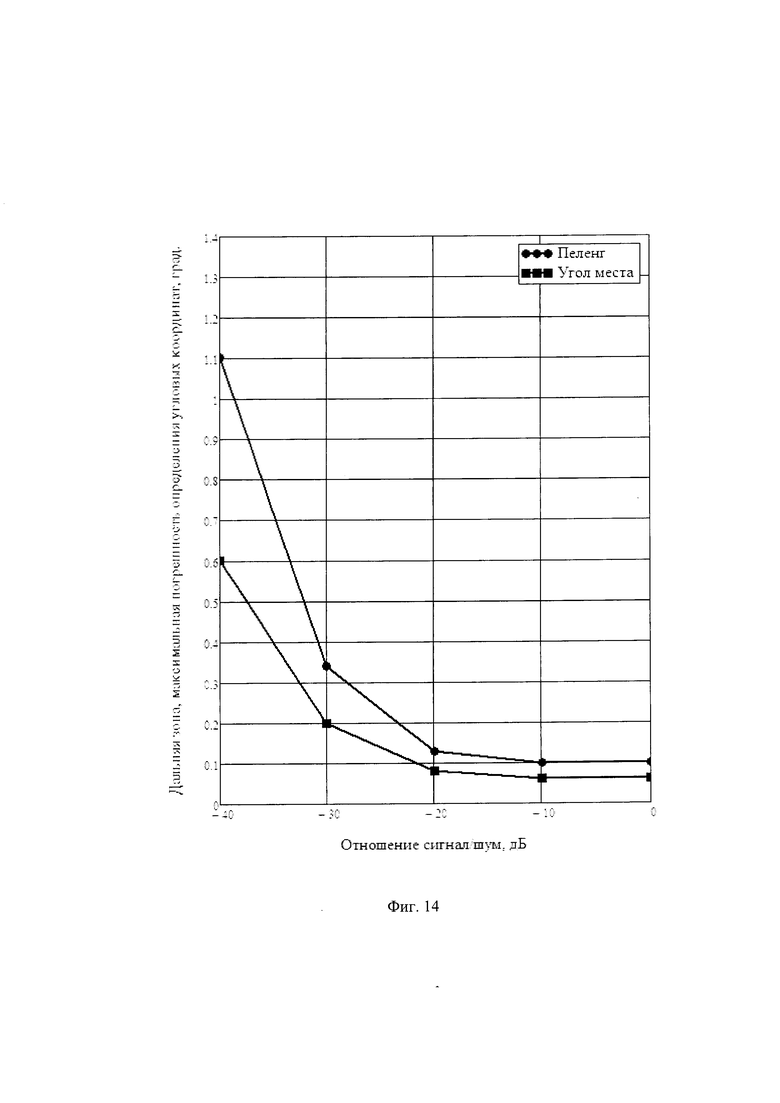
Предлагаемое изобретение относится к области подводной навигации, а именно к определению местоположения автономного донного подводного объекта посредством гидроакустической навигационной системы, и может быть использовано в системах гидроакустического мониторинга различного назначения, интегрированных системах подводного наблюдения, позиционных сетецентрических системах для гидроакустического поиска с надводного поискового судна подводных объектов, находящихся на дне известной морской акватории в спящем режиме после выполнения соответствующей миссии. Техническим результатом заявляемого способа является повышение скрытности гидроакустического поиска с надводного поискового судна автономного донного подводного объекта за счет использования в процессе поисковых действий гидроакустических сигналов, маскируемых под возможные акустические фоновые шумы известной акватории поиска - звуки морских животных, рыб, ракообразных, шумы моря, выбора надлежащей структуры, амплитудных, временных и частотных параметров этих гидроакустических сигналов, реализации соответствующих действий по излучению, приему и обработке гидроакустических сигналов на поисковом судне и автономном донном подводном объекте. 8 з.п. ф-лы, 4 табл., 14 ил.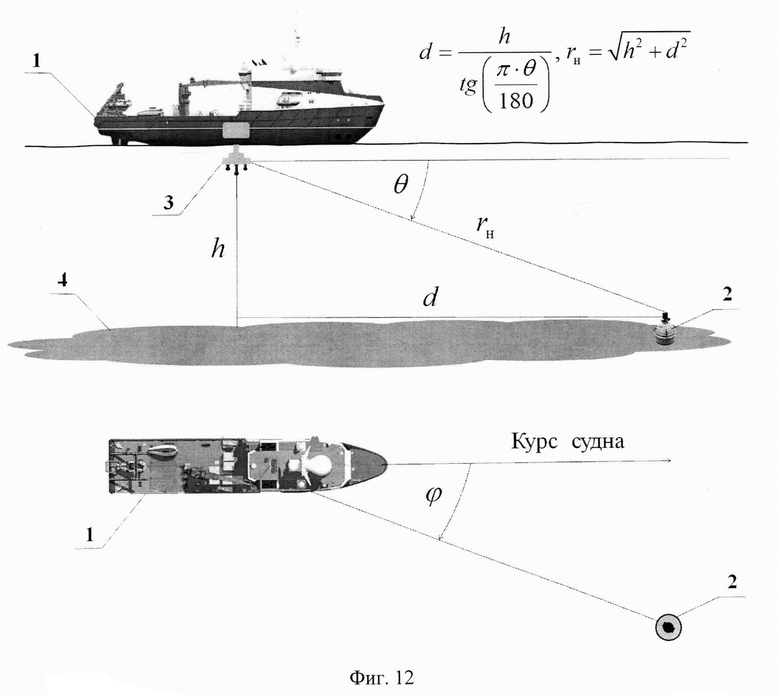
1. Способ гидроакустического поиска с надводного поискового судна автономного донного подводного объекта, находящегося в спящем режиме в известной морской акватории после выполнения соответствующей миссии, заключающийся в оборудовании поискового судна согласованной с его курсом пеленгационной антенной диаметрально-ортогональной геометрии расположения четырех приемных гидрофонов, слабонаправленной передающей гидроакустической антенной, аппаратурой приема и обработки сигнала маяка-пингера автономного донного подводного объекта на базе высокостабильного опорного генератора, аппаратурой формирования сигналов активации и всплытия автономного донного подводного объекта, гидроакустическими средствами измерения глубины акватории поиска, в оснащении автономного донного подводного объекта слабонаправленными приемной и передающей гидроакустическими антеннами, аппаратурой приема и обработки сигналов активации и всплытия поискового судна, маяком-пингером, формирующим, с использованием высокостабильного опорного генератора, повторяющийся навигационный сигнал, частота которого априорно известна на поисковом судне, системой изменения плавучести, в повторяющемся, по мере продвижения поискового судна по акватории поиска, излучении его передающей антенной в водную среду пространства нижней полусферы, относительно поискового судна, гидроакустического сигнала активации автономного донного подводного объекта, превышающего фоновые шумы водной среды акватории поиска, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала активации поискового судна, в переводе оборудования автономного донного подводного объекта, по факту достоверного приема сигнала активации, из спящего в рабочий режим, в излучении передающей антенной автономного донного подводного объекта в водную среду акватории поиска, в направлениях верхней полусферы, относительно морского дна, гидроакустического навигационного сигнала, превышающего фоновые шумы водной среды, сформированного маяком-пингером и повторяющегося с интервалом, большим его длительности, в приеме пеленгационной антенной поискового судна гидроакустического сигнала маяка-пингера и его соответствующей обработке, с последующим прекращением, по факту его достоверного приема, излучения передающей антенной поискового судна гидроакустического сигнала активации автономного донного подводного объекта, в измерении и запоминании глубины h водной акватории поиска гидроакустическими средствами измерения поискового судна, в определении и запоминании пеленга ϕ и угла места θ автономного донного подводного объекта относительно поискового судна, в оценке и запоминании по определенному углу места и измеренной глубине водной акватории поиска приближенных значений дальности d и наклонного расстояния rн до автономного донного подводного объекта с использованием тригонометрических соотношений:  , в корректировке курса движения поискового судна на основании обновляемых параметров местоположения ϕ, θ, d, rн автономного донного подводного объекта относительно поискового судна, по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта, в излучении передающей антенной поискового судна в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, в паузе между сигналами маяка-пингера автономного донного подводного объекта, гидроакустического сигнала всплытия автономного донного подводного объекта, превышающего фоновые шумы водной среды, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала всплытия, в прекращении, по факту достоверного приема сигнала всплытия, излучения передающей антенной автономного донного подводного объекта гидроакустического сигнала маяка-пингера, в запуске соответствующих исполнительных механизмов системы изменения плавучести автономного донного подводного объекта, отличающийся тем, что формируют и запоминают при подготовке миссии автономного подводного объекта на подводном объекте и поисковом судне излучаемые в процессе гидроакустического поиска сигналы: на автономном подводном объекте - сигналы маяка-пингера, на поисковом судне - сигналы активации и всплытия автономного донного подводного объекта, имеющие заданную структуру, амплитудные, временные и частотные параметры, по акустическому восприятию приближающиеся к возможным фоновым шумам известной акватории поиска, при этом сигналы активации и всплытия поискового судна состоят из двух составляющих: стартовой посылки и посылки опознавания, комбинированный сигнал маяка-пингера автономного донного подводного объекта содержит четыре составляющие: стартовую посылку, посылку опознавания, навигационную посылку в виде гармонического сигнала известной на поисковом судне частоты и маскирующий навигационную посылку квазибелый шум, частотные параметры которого выбирают, исходя из необходимой точности определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, обеспечивая необходимую полосу частот и соответствующее превышение нижней граничной частоты его спектра над частотой гармонических колебаний навигационной посылки, видоизменяют структуру зондирующих импульсов судового эхолота таким образом, чтобы акустическое восприятие процедуры измерения глубины водной акватории поиска соответствовало возможному гибридному шумовому фону морской среды, кроме этого, структура и параметры излучаемых сигналов маяка-пингера автономного донного подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов активации и всплытия поискового судна априорно известны на автономном донном подводном объекте, выполняют перед поиском процедуру калибровки усилительных трактов пеленгационной антенны поискового судна с получением и запоминанием калибровочных поправок, осуществляют в процессе поиска на поисковом судне процедуру определения и запоминания угловых координат автономного донного подводного объекта относительно поискового судна, согласованную с геометрическими параметрами пеленгационной антенны и позволяющую позиционировать автономный донный подводный объект относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/шум замаскированного навигационного сигнала.
, в корректировке курса движения поискового судна на основании обновляемых параметров местоположения ϕ, θ, d, rн автономного донного подводного объекта относительно поискового судна, по мере его продвижения по акватории поиска до предварительно определенной безопасной дальности всплытия автономного донного подводного объекта, в излучении передающей антенной поискового судна в водную среду акватории поиска, в пространстве нижней полусферы, относительно поискового судна, в паузе между сигналами маяка-пингера автономного донного подводного объекта, гидроакустического сигнала всплытия автономного донного подводного объекта, превышающего фоновые шумы водной среды, в приеме посредством приемной антенны и необходимой обработке на автономном донном подводном объекте гидроакустического сигнала всплытия, в прекращении, по факту достоверного приема сигнала всплытия, излучения передающей антенной автономного донного подводного объекта гидроакустического сигнала маяка-пингера, в запуске соответствующих исполнительных механизмов системы изменения плавучести автономного донного подводного объекта, отличающийся тем, что формируют и запоминают при подготовке миссии автономного подводного объекта на подводном объекте и поисковом судне излучаемые в процессе гидроакустического поиска сигналы: на автономном подводном объекте - сигналы маяка-пингера, на поисковом судне - сигналы активации и всплытия автономного донного подводного объекта, имеющие заданную структуру, амплитудные, временные и частотные параметры, по акустическому восприятию приближающиеся к возможным фоновым шумам известной акватории поиска, при этом сигналы активации и всплытия поискового судна состоят из двух составляющих: стартовой посылки и посылки опознавания, комбинированный сигнал маяка-пингера автономного донного подводного объекта содержит четыре составляющие: стартовую посылку, посылку опознавания, навигационную посылку в виде гармонического сигнала известной на поисковом судне частоты и маскирующий навигационную посылку квазибелый шум, частотные параметры которого выбирают, исходя из необходимой точности определения угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, обеспечивая необходимую полосу частот и соответствующее превышение нижней граничной частоты его спектра над частотой гармонических колебаний навигационной посылки, видоизменяют структуру зондирующих импульсов судового эхолота таким образом, чтобы акустическое восприятие процедуры измерения глубины водной акватории поиска соответствовало возможному гибридному шумовому фону морской среды, кроме этого, структура и параметры излучаемых сигналов маяка-пингера автономного донного подводного объекта априорно известны на поисковом судне, а структура и параметры излучаемых сигналов активации и всплытия поискового судна априорно известны на автономном донном подводном объекте, выполняют перед поиском процедуру калибровки усилительных трактов пеленгационной антенны поискового судна с получением и запоминанием калибровочных поправок, осуществляют в процессе поиска на поисковом судне процедуру определения и запоминания угловых координат автономного донного подводного объекта относительно поискового судна, согласованную с геометрическими параметрами пеленгационной антенны и позволяющую позиционировать автономный донный подводный объект относительно поискового судна с необходимой точностью в условиях малых отношений сигнал/шум замаскированного навигационного сигнала.
2. Способ гидроакустического поиска автономного донного подводного объекта по п. 1, отличающийся тем, что в качестве составляющих сигналов активации, всплытия поискового судна и комбинированного сигнала маяка-пингера автономного донного подводного объекта используют фрагменты сонограмм записей звуков морских животных, рыб, ракообразных и шумов морской среды с заданными амплитудными, временными и частотными параметрами, при этом используемые фрагменты обладают ярко выраженным импульсным характером с хорошо различимой структурой для достоверного импульсного приема, а фрагменты сонограмм записей фоновых шумов мелкого или глубокого моря, выбираемые в зависимости от глубины предполагаемой акватории поиска автономного подводного объекта и имеющие схожие с квазибелым шумом статистические характеристики, служат основой для формирования шума, маскирующего гармоническую навигационную посылку маяка-пингера автономного донного подводного объекта.
3. Способ гидроакустического поиска автономного донного подводного объекта по п. 1, отличающийся тем, что частотные параметры квазибелого шума, маскирующего навигационную посылку комбинированного сигнала маяка-пингера автономного донного подводного объекта, определяют, исходя из необходимой точности оценки угловых координат автономного донного подводного объекта относительно поискового судна в процессе его гидроакустического поиска, обеспечивая превышение нижней граничной частоты его спектра над частотой гармонических колебаний навигационной посылки не менее пяти раз, а верхнюю граничную частоту спектра квазибелого шума согласовывают с верхней границей полосы пропускания передающего тракта автономного донного подводного объекта.
4. Способ гидроакустического поиска автономного донного подводного объекта по п. 2, отличающийся тем, что формируют из фрагментов сонограмм записей звуков различных морских животных, рыб, ракообразных ансамбль сигналов активации поискового судна с разным количеством импульсов на выбранной длительности посылки опознавания, порядок излучения сигналов активации из упомянутого ансамбля изменяют случайным образом до получения ответа от автономного донного подводного объекта, при этом число различающихся в ансамбле сигналов активации, сформированных на поисковом судне, и количество импульсов на выбранной длительности посылки опознавания каждого сигнала ансамбля априорно известны на автономном донном подводном объекте.
5. Способ гидроакустического поиска автономного донного подводного объекта по п. 2, отличающийся тем, что формируют из фрагментов сонограмм записей звуков различных морских животных, рыб, ракообразных ансамбль комбинированных сигналов маяка-пингера автономного донного подводного объекта с разным количеством импульсов на выбранной длительности посылки опознавания, порядок излучения сигналов маяка-пингера из упомянутого ансамбля изменяют случайным образом до получения сигнала всплытия от поискового судна, при этом число различающихся сигналов в ансамбле маяка-пингера, сформированных на автономном донном подводном объекте, и количество импульсов на выбранной длительности посылки опознавания каждого сигнала ансамбля априорно известны на поисковом судне.
6. Способ гидроакустического поиска автономного донного подводного объекта по п. 1, отличающийся тем, что интервалы повторения гидроакустических сигналов активации ТА поискового судна и маяка-пингера ТМ автономного донного подводного объекта выбирают случайно изменяющимися и превышающими минимально допустимые величины TA>TA min, TM>TM min, которые определяют из условия обеспечения в процессе поиска асинхронного режима приема-передачи, исключающего перекрытие по времени излучаемых и принимаемых гидроакустических сигналов на поисковом судне и автономном донном подводном объекте, используя следующие расчетные соотношения:  , где Δτ2 - длительность посылки опознавания сигнала активации поискового судна, Δτ4 - длительность посылки опознавания сигнала всплытия поискового судна, Δτ8 - общая длительность сигнала маяка-пингера автономного донного подводного объекта, cmin - минимально возможная скорость звука в морской среде, rн max - прогнозируемое максимально возможное наклонное расстояние от поискового судна до автономного донного подводного объекта при их акустическом контакте в акватории поиска.
, где Δτ2 - длительность посылки опознавания сигнала активации поискового судна, Δτ4 - длительность посылки опознавания сигнала всплытия поискового судна, Δτ8 - общая длительность сигнала маяка-пингера автономного донного подводного объекта, cmin - минимально возможная скорость звука в морской среде, rн max - прогнозируемое максимально возможное наклонное расстояние от поискового судна до автономного донного подводного объекта при их акустическом контакте в акватории поиска.
7. Способ гидроакустического поиска автономного донного подводного объекта по п. 2, отличающийся тем, что на основе идентификации импульсных фрагментов сонограмм записей звуков морских животных, рыб, ракообразных видоизменяют структуру зондирующих импульсов судового эхолота таким образом, чтобы акустическое восприятие процедуры измерения глубины водной акватории в процессе поиска соответствовало возможному гибридному шумовому фону морской среды, причем количество зондирующих импульсов эхолота на интервале времени, равном длительности сигнала всплытия, не должно совпадать с общим числом импульсов в сигнале всплытия.
8. Способ гидроакустического поиска автономного донного подводного объекта по п. 1, отличающийся тем, что процедура калибровки усилительных трактов пеленгационной антенны поискового судна, выполняемая перед началом гидроакустического поиска, включает в себя следующие действия и операции: формируют на поисковом судне калибровочный непрерывный гармонический сигнал с большим отношением сигнал/шум и известной частотой гармонических колебаний навигационной посылки сигнала маяка-пингера автономного донного подводного объекта, который подают на входы четырех полосовых усилителей сигналов пеленгационной антенны, отключенных на время калибровки от выходов гидрофонов пеленгационной антенны, сигналы H1(t), H2(t), H3(t), H4(t) на выходах полосовых усилителей пеленгационной антенны подвергают синхронной дискретизации с кратным четырем количеством отсчетов k на периоде колебаний и общим числом отсчетов L в выборке, запоминают четыре массива Н1(n), Н2(n), Н3(n), Н4(n) выборок сигналов

где n - порядковый номер отсчета в выборке, а параметры k и L связаны соотношениями: L=1.25k, k>3⋅103, осуществляют нормирование отсчетов массивов H1(n), Н2(n), Н3(n), Н4(n) выборок сигналов путем их представления своими знаками по правилу
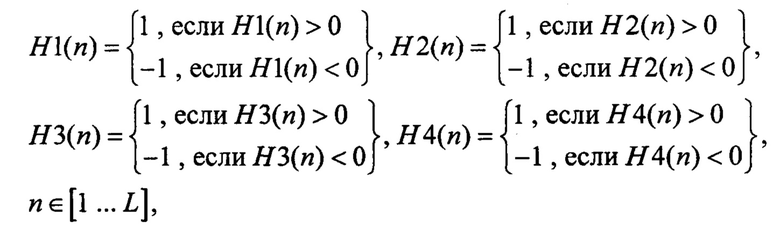
вычисляют и запоминают вспомогательные корреляционные параметры β1, γ1, β2, γ2, β3, γ3
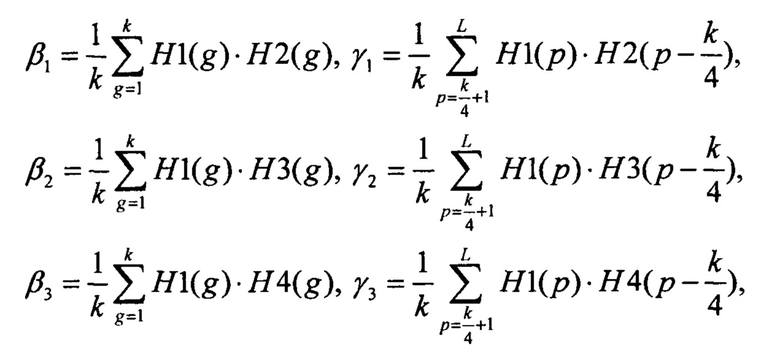
рассчитывают и запоминают разности фаз ΔΨ12, ΔΨ13, ΔΨ14 колебаний калибровочного сигнала на выходах трех пар полосовых усилителей сигналов пеленгационной антенны поискового судна, являющиеся калибровочными поправками
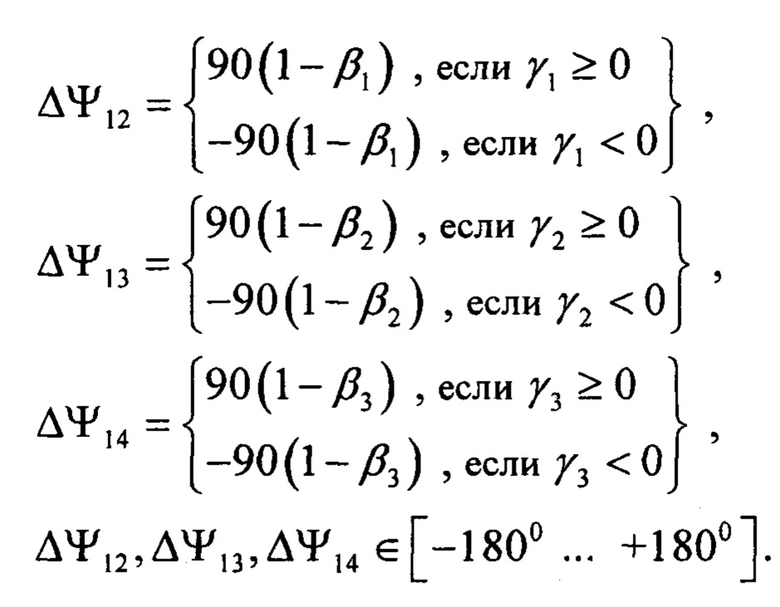
9. Способ гидроакустического поиска автономного донного подводного объекта по п. 1, отличающийся тем, что процедура определения угловых координат автономного донного подводного объекта относительно поискового судна при малых отношениях сигнал/шум замаскированного навигационного сигнала, согласованная с геометрией пеленгационной антенны поискового судна и выполняемая в процессе гидроакустического поиска, включает в себя следующие действия и операции: смесь гармонических колебаний и маскирующих шумов навигационной посылки комбинированного сигнала маяка-пингера автономного донного подводного объекта, принятая четырьмя гидрофонами пеленгационной антенны поискового судна, представленная сигналами u1(t), u2(t), u3(t), u4(t) на интервале навигационной посылки, и квадратурные составляющие Y1(t), Y2(t) гармонического сигнала Y(t) частоты навигационной посылки комбинированного сигнала маяка-пингера автономного донного подводного объекта, сформированные на базе судового высокостабильного опорного генератора и имеющие большое отношение сигнал/шум, подвергают синхронной дискретизации с кратным четырем количеством отсчетов k на периоде колебаний и общим числом отсчетов L в выборке, запоминают шесть массивов u1(n), u2(n), u3(n), u4(n), Y1(n), Y2(n) выборок сигналов
где n - порядковый номер отсчета в выборке, а параметры k и L связаны соотношениями: L=100k, k>3⋅103, вычисляют и запоминают весовые коэффициенты W1 - W8, определяющие соответствующие проекции сигналов u1(t), u2(t), u3(t), u4(t) на квадратурные составляющие Y1(t), Y2(t) гармонического сигнала Y(t)
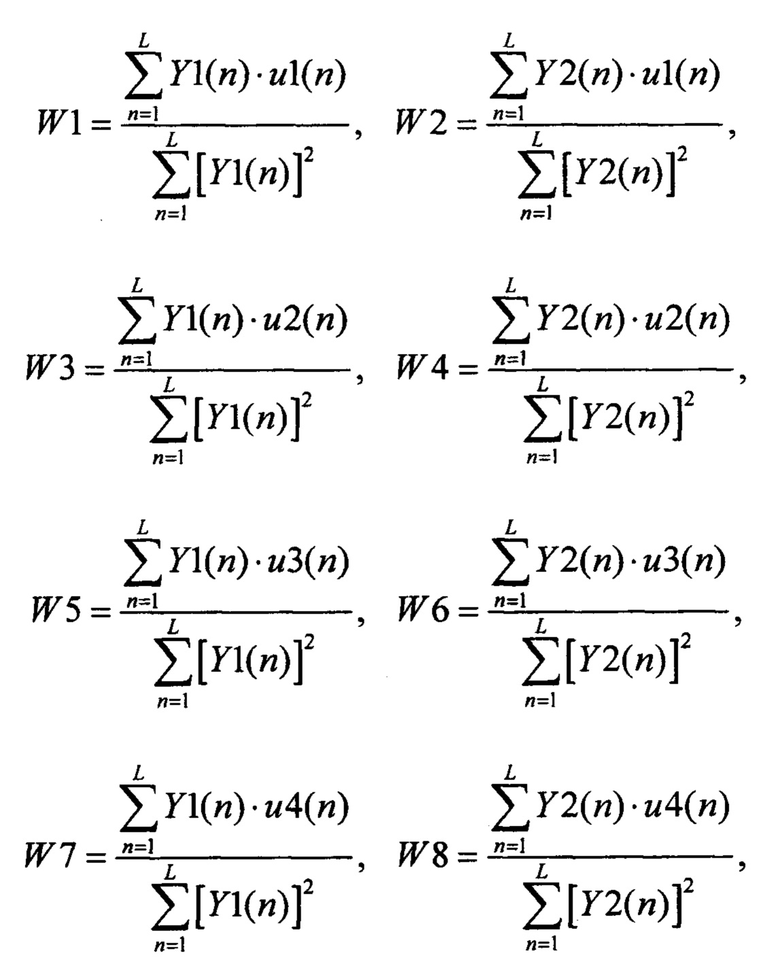
формируют и запоминают четыре массива R1(n), R2(n), R3(n), R4(n) выборок сигналов с большими отношениями сигнал/шум, синфазных с сигналами u1(t), u2(t), u3(t), u4(t) соответственно,

осуществляют нормирование отсчетов массивов R1(n), R2(n), R3(n), R4(n) выборок сигналов путем их представления своими знаками по правилу
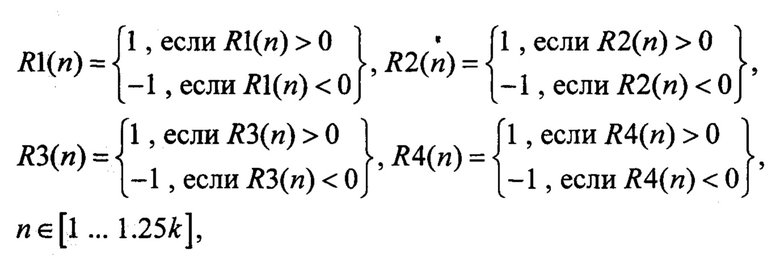
вычисляют и запоминают вспомогательные корреляционные параметры β1, γ1, β2, γ2, β3, γ3
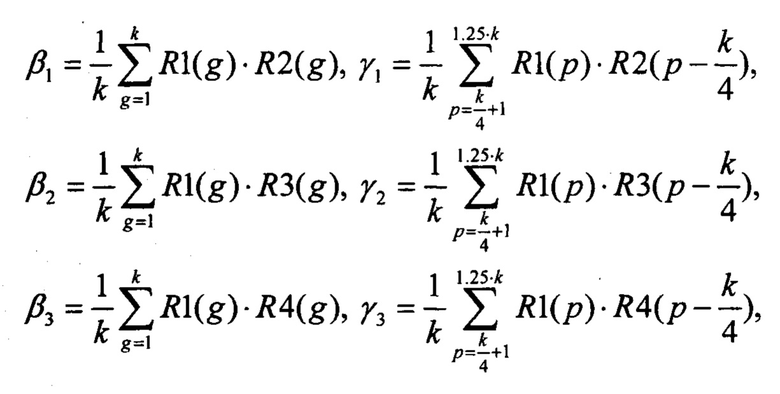
рассчитывают и запоминают разности фаз Δφ12, Δφ13, Δφ14 колебаний замаскированного гармонического сигнала навигационной посылки комбинированного сигнала маяка-пингера автономного донного подводного объекта на выходах трех пар гидрофонов пеленгационной антенны поискового судна
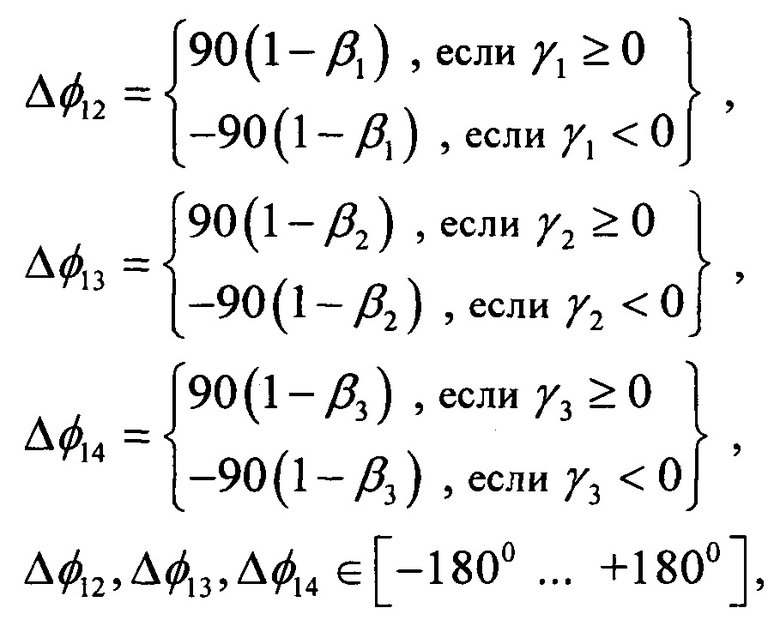
уточняют и запоминают значения разностей фаз Δψ12, Δψ13, Δψ14 колебаний замаскированного гармонического сигнала навигационной посылки комбинированного сигнала маяка-пингера автономного донного подводного объекта на выходах трех пар гидрофонов пеленгационной антенны поискового судна с учетом калибровочных поправок ΔΨ12, ΔΨ13, ΔΨ14, вычисленных в процедуре калибровки усилительных трактов пеленгационной антенны поискового судна
Δψ12=Δφ12-ΔΨ12, Δψ13=Δφ13-ΔΨ13, Δψ14=Δφ14-ΔΨ14,
определяют и запоминают, относительно курса поискового судна, пеленг ϕ и, относительно уровня водной поверхности при вертикальной стабилизации пеленгационной антенны поискового судна, угол места θ автономного донного подводного объекта, используя следующие тригонометрические соотношения
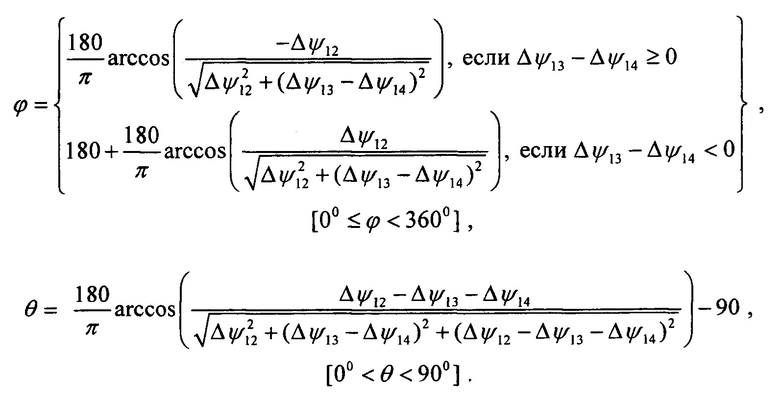
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| Способ определения местоположения подводного объекта | 2018 |
|
RU2700278C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| WO 2007022233 A2, 22.02.2007. | |||

