Область техники, к которой относится изобретение
Данное изобретение относится к технической области электромеханических устройств, в частности, МЭМС (от «микроэлектромеханические системы») или НЭМС (от «наноэлектромеханические системы»), в частности, устройств, содержащих электрически поляризованные подвижные элементы миллиметровых, микрометровых и даже нанометровых размеров, такие как электростатические датчики или приводы.
Уровень техники
Внутри МЭМС-устройств часто используют силы притяжения или отталкивания, в частности, электростатические взаимодействия для реализации электрической функции, например, привода или детектирования. Известные простые варианты электростатических приводов, содержащих электроды, имеющие по меньшей мере одну плоскую зону и обращенные друг к другу, на которые подают разное электрическое напряжение. Известно также использование взаимопроникающих друг в друга гребенок в качестве электродов в таком приводе, например, чтобы покрывать более значительную амплитуду перемещения.
Одним из основных видов неисправности электромеханических устройств МЭМС или НЭМС является залипание подвижных элементов, в частности, под действием сил Ван дер Ваальса или при электростатическом взаимодействии по-разному поляризованных подвижных элементов. Одним из видов неисправности, которого следует избегать, является появление микро-искрения: электрическая дуга может возникнуть, когда по-разному поляризованные подвижные элементы поляризуются повышенными уровнями потенциалов (как правило, несколько десятков вольт) и/или когда подвижные элементы находятся друг от друга на незначительном расстоянии (как правило, порядка микрометра или меньше). С другой стороны, подвижные элементы и соседние с ними элементы могут быть повреждены от сильных и/или повторяющихся ударов.
Чтобы решить эти проблемы, известным решением для двух плоских подвижных элементов, расположенных в одной плоскости, является размещение механически прочных жестких или гибких упорных элементов в зоне, где указанные подвижные элементы могут входить в контакт. Следовательно, силы сцепления, которые зависят от площади контакта, оказываются ограниченными.
Однако введение в контакт упора, имеющего определенную полярность, с элементом другой полярности, может привести к появлению сквозного тока и к электростатическому разряду, что может нарушить работу привода и даже стать причиной его необратимого повреждения. Риск появления микро-искрения исключен не полностью. В этом случае предложено электрически изолировать такой упор от подвижного элемента, за пределы которого он выступает, таким образом, чтобы его контакт с расположенным напротив элементом (контрупором) не представлял риска электростатического залипания или электростатического разряда.
В патентной заявке US 2015/0033849 описано устройство, которое можно расположить внутри инерциального МЭМС-датчика, содержащее подвижный плоский груз и находящуюся напротив параллельную детекторную пластину. Подвижный груз и детекторная пластина находятся под разными электрическими потенциалами. Чтобы избежать электростатического разряда во время ускорений или ударов, приводящих в движение подвижный груз, на детекторной пластине выполнены упорные элементы, ориентированные в направлении, по существу перпендикулярном к плоскости детекторной пластины. Указанные упорные элементы электрически изолированы от детекторной пластины, и на них подают такой же потенциал, что и на находящийся напротив подвижный груз. Однако такое решение применимо, только если относительное движение подвижных элементов происходит за пределами плоскости с составляющими в направлении, перпендикулярном (в этом примере вертикальном) к плоским подвижным элементам, что может привести к контакту между подвижными элементами с риском электростатического разряда.
Раскрытие сущности изобретения
Настоящим изобретением предложено решение, применимое для двух компланарных плоских электродов, находящихся на одном слое внутри устройства МЭМС или НЭМС, подвижных относительно друг друга по меньшей мере в первом направлении перемещения, заключенном в плоскости электродов, при этом электроды предназначены для подачи на них разных потенциалов.
Заявленное решение обеспечивает механическую прочность во время работы этих двух подвижных относительно друг друга элементов и одновременно позволяет сохранить их электромеханическую функциональность после вибрационного или ударного воздействия, которое приводит к их движению в плоскости.
Кроме первого плоского слоя, содержащего два элемента, из которых по меньшей мере один является подвижным и которые поляризованы по-разному (как правило, электроды), и обеспечивающего для обоих требуемую электромеханическую функциональность, было предложено расположить дополнительный слой, электрически изолированный от первого, содержащий подвижные относительно друг друга элементы, которые механически соединены с двумя элементами первого слоя и которые могут быть приведены в движение в своей плоскости и упереться друг в друга.
Задачей изобретения является предупреждение прямого контакта между двумя по-разному поляризованными элементами, для которых необходимо сохранить функцию, и даже предотвращение сближения указанных элементов, достаточного для возникновения явления микро-искрения. Это позволяет обеспечить механическую прочность и электрическую стойкость указанных элементов даже в случае вибрационного или ударного воздействия и даже в случае осуществления указанных элементов из хрупких материалов.
Таким образом, можно ограничить риски, связанные с электростатическими взаимодействиями, при помощи простого и надежного решения, предназначенного для устройства микрометрических или нанометрических размеров при решении задачи миниатюризации такого устройства.
В связи с вышеизложенным, объектом изобретения является устройство МЭМС или НЭМС типа датчика или привода, содержащее набор, первый плоский слой которого содержит два плоских электрода, предназначенных для подачи на них разных электрических потенциалов, при этом первый электрод является подвижным в плоскости относительно второго электрода в первом направлении, параллельном первому плоскому слою, и второй плоский слой, наложенный на первый и электрически изолированный от первого слоя по меньшей мере одним промежуточным слоем из изоляционного материала, при этом второй плоский слой содержит первый плоский элемент, механически соединенный с первым плоским электродом, и второй плоский элемент, механически соединенный с вторым плоским электродом. Второй слой дополнительно содержит упорный элемент, выступающий от любого из этих двух плоских элементов в вышеупомянутом первом направлении, причем этот упорный элемент предназначен для подачи на него такого же электрического потенциала, что и на находящуюся напротив поверхность, принадлежащую к другому из плоских элементов. Упор может входить в контакт с указанной находящейся напротив поверхностью плоского элемента и блокировать сближение двух плоских электродов первого плоского слоя в первом направлении во время воздействия, чтобы избежать их чрезмерного сближения.
Предпочтительно, но не ограничительно, в состоянии отсутствия воздействия, например, на выходе завода, набор выполнен таким образом, чтобы, если рассматривать расстояние свободного хода упора между упорным элементом и находящимся напротив плоским элементом в вышеупомянутом первом направлении перемещения электродов, указанное расстояние свободного хода было меньше минимального расстояния между любым свободным концом первого плоского электрода и ближайшим концом второго плоского электрода в этом же первом направлении.
При этом во время воздействия, приводящего к относительному перемещению двух электродов в этом первом направлении, упорный элемент может прервать указанное относительное движение двух электродов, прежде чем первый электрод войдет в контакт с вторым.
Факультативно, по меньшей мере один из плоских электродов первого слоя может по меньшей мере частично деформироваться в первом направлении. Расстояние прогиба электрода определяют при этом как максимальную деформацию деформирующегося электрода в этом же направлении или как сумму максимальных деформаций обоих электродов, если допустить, что оба электрода могут деформироваться в первом направлении. В этом случае минимальное расстояние между электродами должно превышать сумму расстояния прогиба электрода и первого расстояния свободного хода электродов.
Факультативно и в сочетании или нет с возможностью деформации электродов, по меньшей мере один из плоских элементов второго слоя может по меньшей мере частично деформироваться в первом направлении. Расстояние прогиба плоского элемента определяют при этом как максимальную деформацию указанного плоского элемента (например, упора, если указанный плоский элемент содержит упор) в этом же направлении или как сумму максимальных деформаций обоих плоских элементов, если допустить, что оба плоских элемента могут деформироваться в первом направлении. В этом случае минимальное расстояние между электродами должно превышать сумму расстояния прогиба плоского элемента и первого расстояния свободного хода электродов.
Согласно частному варианту осуществления, в котором один из двух плоских элементов может частично деформироваться в первом направлении, во втором плоском слое выполнена полость (не сквозная, которая не проходит через весь набор) в месте крепления упора. Согласно другому варианту осуществления, который можно комбинировать или не комбинировать с первым, во втором плоском слое выполнена не сквозная полость вдоль наружного края контрупора (поверхность напротив упора). В этих двух вариантах осуществления расстояние прогиба плоских элементов является суммой размеров двух полостей или размером единственной полости, если выполнена только одна полость.
Согласно другому варианту осуществления, в котором первый плоский элемент содержит первый упорный элемент (например, в виде планки) и второй плоский элемент содержит аналогичный второй упорный элемент, оба плоских электрода и оба плоских элемента могут деформироваться в первом направлении. Возможности деформирования достигают при помощи двух сквозных полостей, которые проходят через набор, при этом первая выполнена в месте крепления первого упора с совмещением в первом направлении с первым упором, но не с вторым упором, образуя первую гибкую пластинку, а вторая выполнена в месте крепления второго упора с совмещением в первом направлении с вторым упором, но не с первым упором, образуя вторую гибкую пластинку.
Первое расстояние свободного хода определяют как минимальное расстояние между одним из упоров и контрупором. При этом расстояние прогиба электродов является суммой размеров двух сквозных полостей.
В версии этого последнего варианта осуществления, в которой остаются эти же первый и второй упорные элементы, первая сквозная полость выполнена в первом плоском электроде с совмещением в первом направлении с концом второго упора, образуя первую гибкую пластинку, и вторая сквозная полость тоже выполнена в первом плоском электроде в месте крепления первого упорного элемента с совмещением в первом направлении с первым упором. Таким образом, обе сквозные полости выполнены рядом друг с другом, образуя две расположенные рядом гибкие пластинки.
При этом первое расстояние свободного хода определяют как минимальное расстояние между одним из упоров и находящейся напротив поверхностью во втором слое.
Факультативно, например, в связи с двумя вышеупомянутыми вариантами осуществления, оба электрода являются также подвижными относительно друг друга во втором направлении, перпендикулярном к первому направлению, при этом второе направление является параллельным относительно слоев набора. Первый плоский элемент содержит первый упор, и второй плоский элемент содержит второй упор. При этом набор выполнен таким образом, что в состоянии без воздействия любой свободный конец первого плоского электрода находится относительно второго плоского электрода на минимальном расстоянии, превышающем второе расстояние свободного хода, которое соответствует второму направлению, при этом второе расстояние свободного хода является минимальным расстоянием между двумя упорами во втором направлении.
Предпочтительно, но не ограничительно электрод содержит плоскую пластину.
Предпочтительно, но не ограничительно электрод содержит электростатическую гребенку.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания частных вариантов осуществления со ссылками на следующие фигуры, которые следует рассматривать как иллюстративные, но неограничивающие.
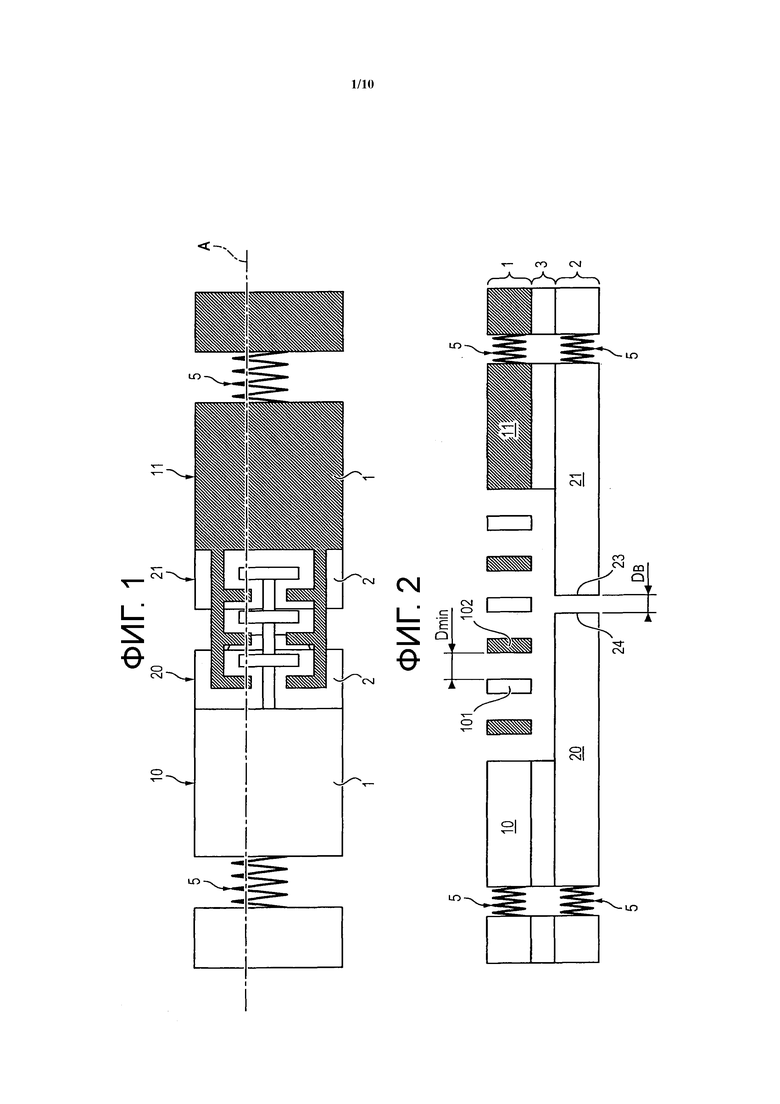
На фиг. 1 схематично показан упорный набор согласно первому варианту осуществления, где плоскость набора электродов показана сверху;
на фиг. 2 показано устройство, изображенное на фиг. 1, вид в разрезе по плоскости, перпендикулярной к плоскости набора, при этом плоскость разреза обозначена осями А;
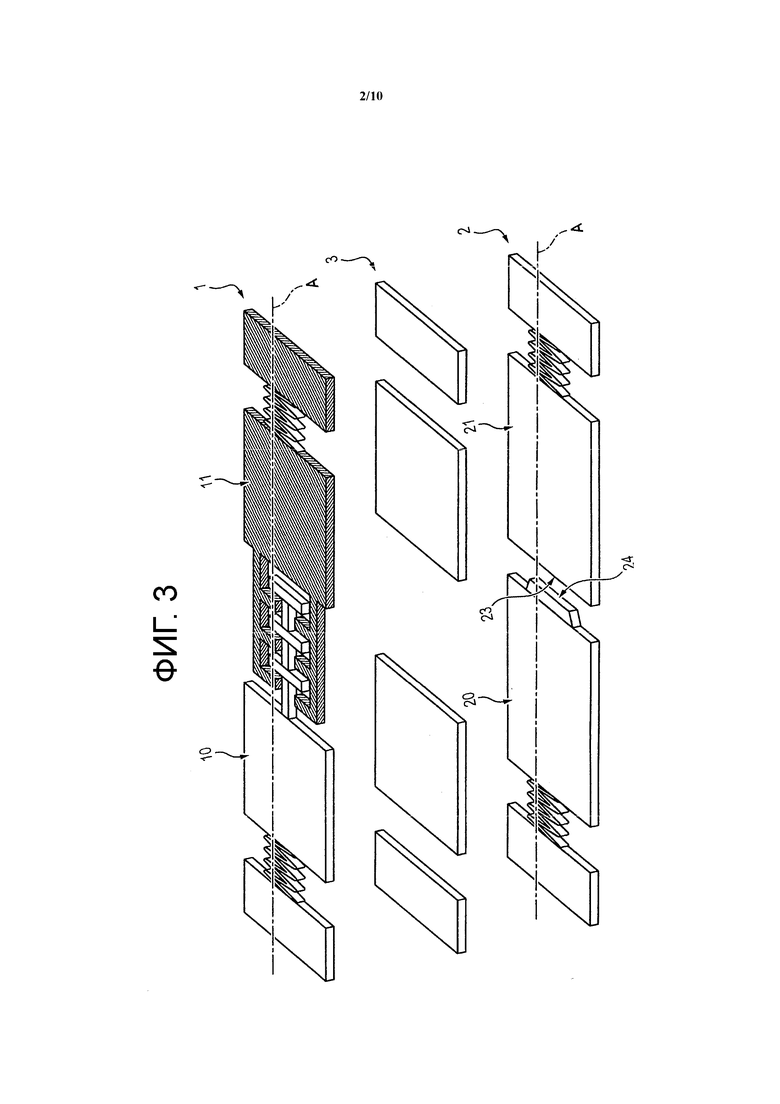
на фиг. 3 показано устройство, изображенное на фиг. 1, вид в перспективе сверху с пространственным разделением деталей;
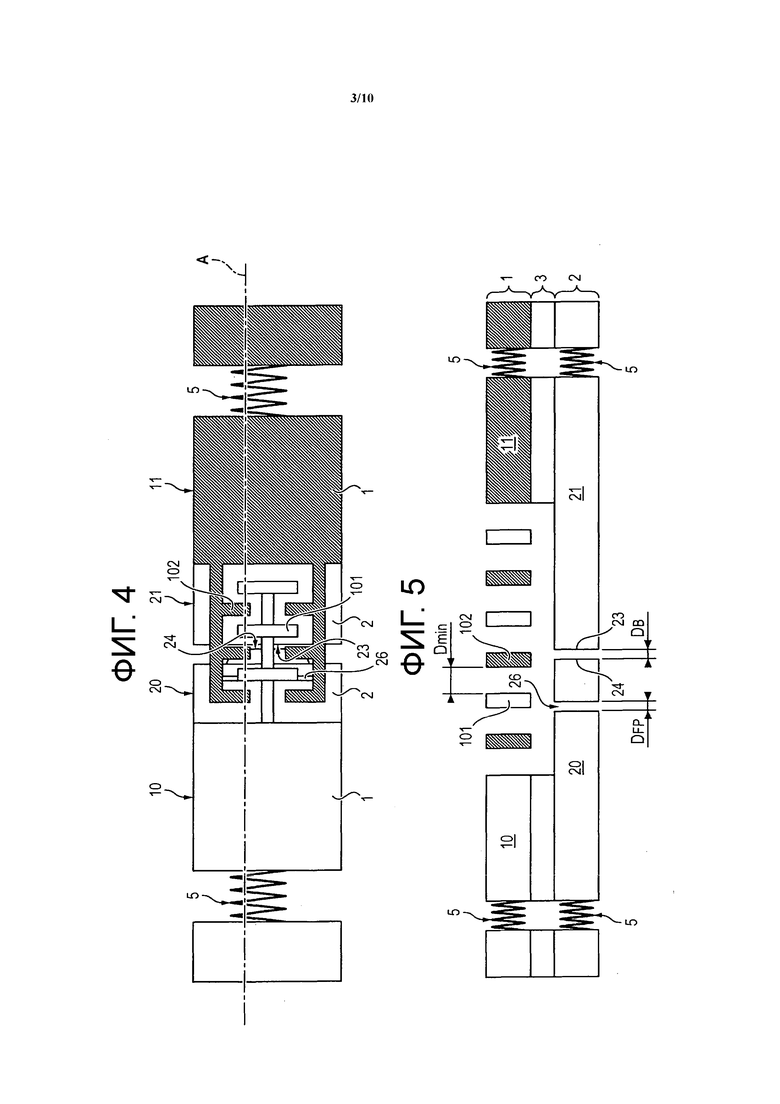
на фиг. 4 схематично показан упорный набор согласно версии первого варианта осуществления, где плоскость набора электродов показана сверху;
на фиг. 5 показано устройство изображенное на фиг. 4, вид в разрезе по плоскости, перпендикулярной к плоскости набора, при этом плоскость разреза обозначена осями А;
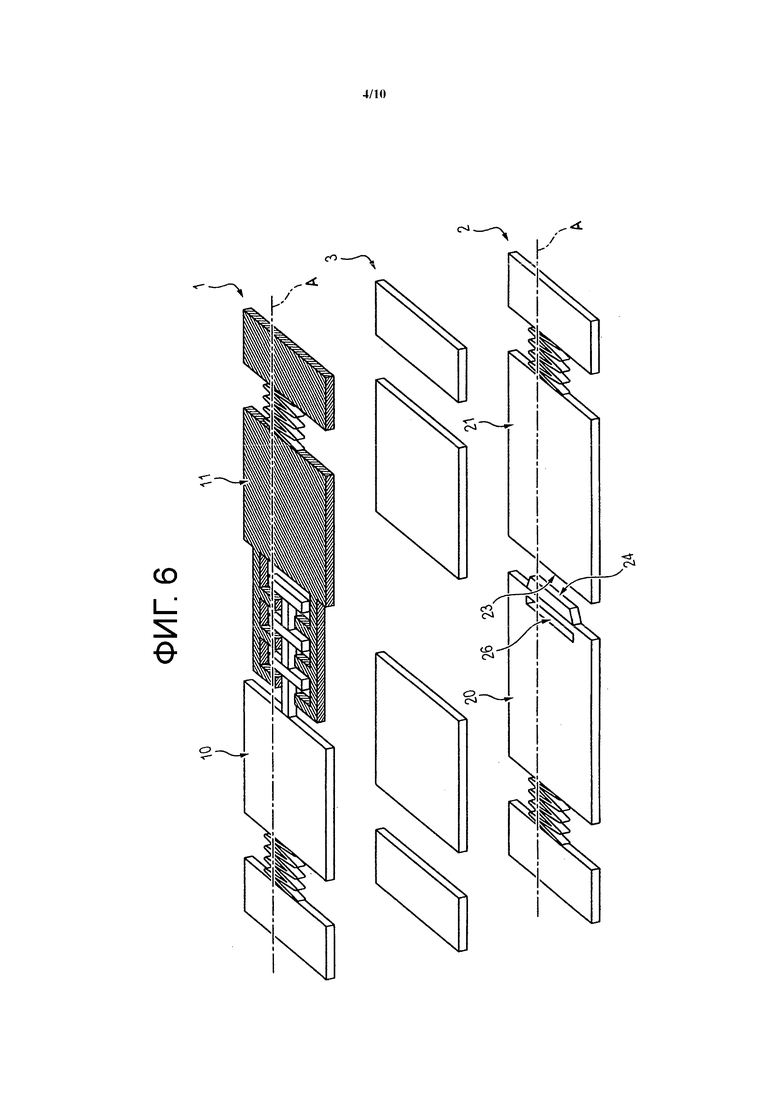
на фиг. 6 показано устройство, изображенное на фиг. 4, вид в перспективе сверху с пространственным разделением деталей;
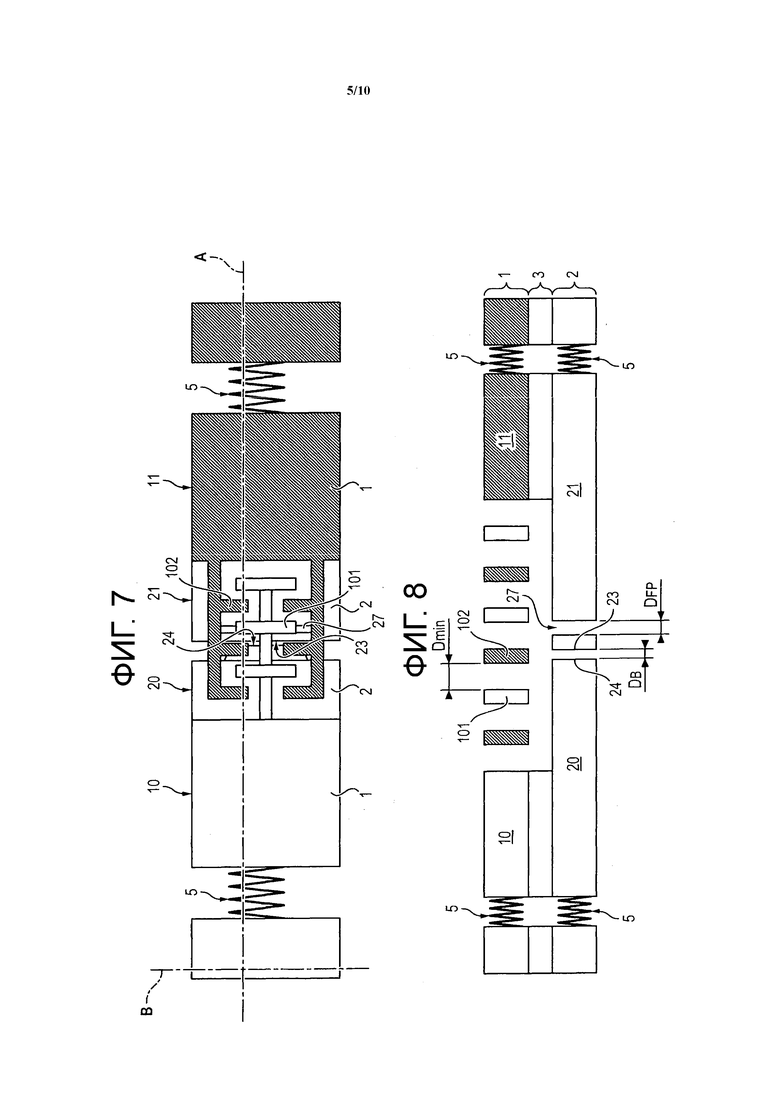
на фиг. 7 схематично показан упорный набор согласно другой версии первого варианта осуществления, где плоскость набора электродов показана сверху;
на фиг. 8 показано устройство, изображенное на фиг. 7, вид в разрезе по плоскости, перпендикулярной к плоскости набора, при этом плоскость разреза обозначена осями А;
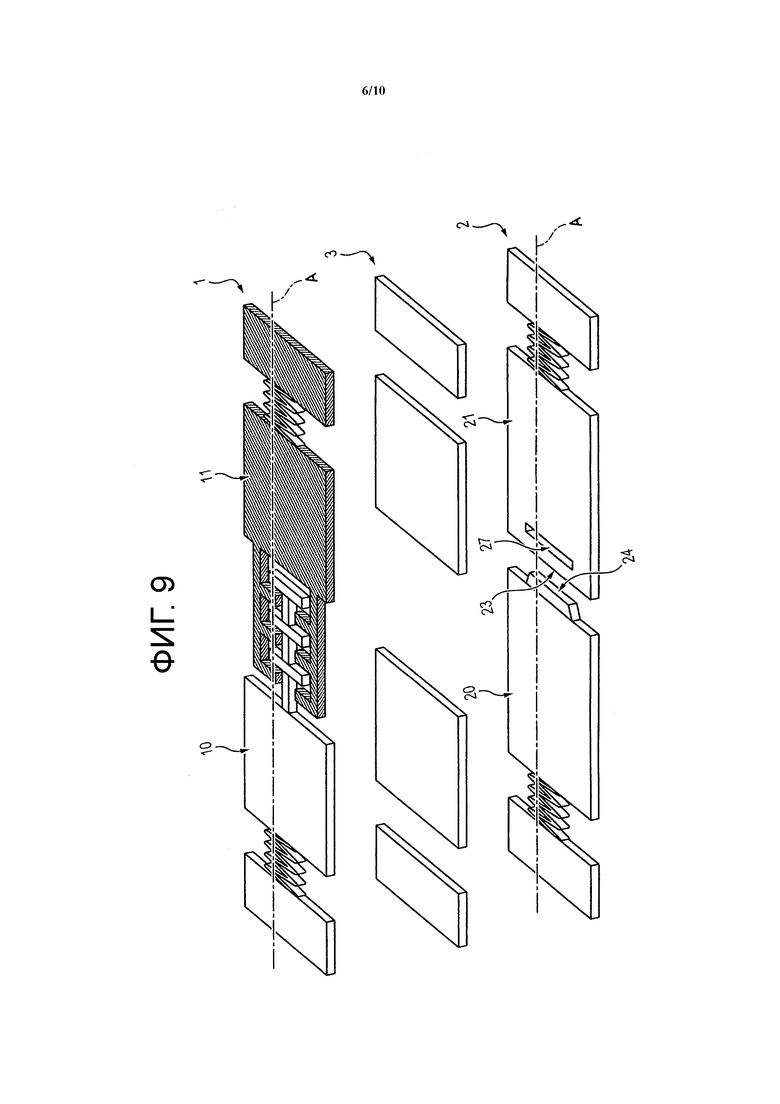
на фиг. 9 показано устройство, изображенное на фиг. 7, вид в перспективе сверху с пространственным разделением деталей;
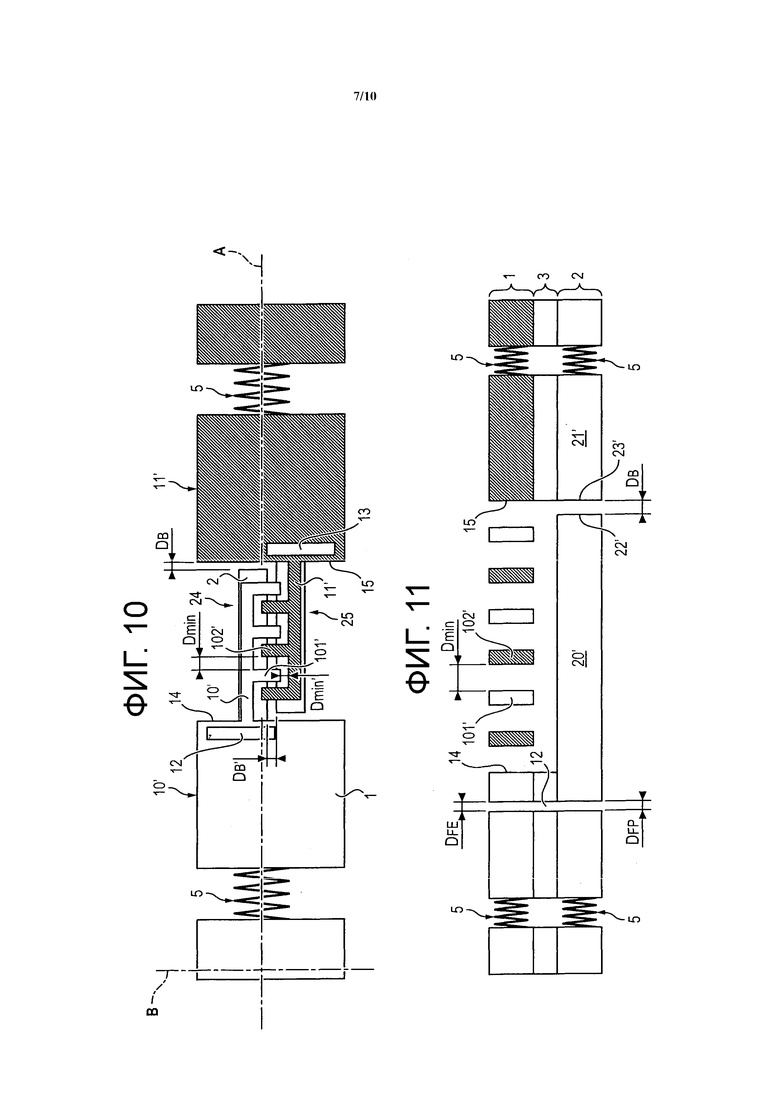
на фиг. 10 схематично показан упорный набор согласно второму варианту осуществления, где плоскость набора электродов показана сверху;
на фиг. 11 показано устройство, изображенное на фиг. 10, вид в разрезе по плоскости, перпендикулярной к плоскости набора, при этом плоскость разреза обозначена осями А;
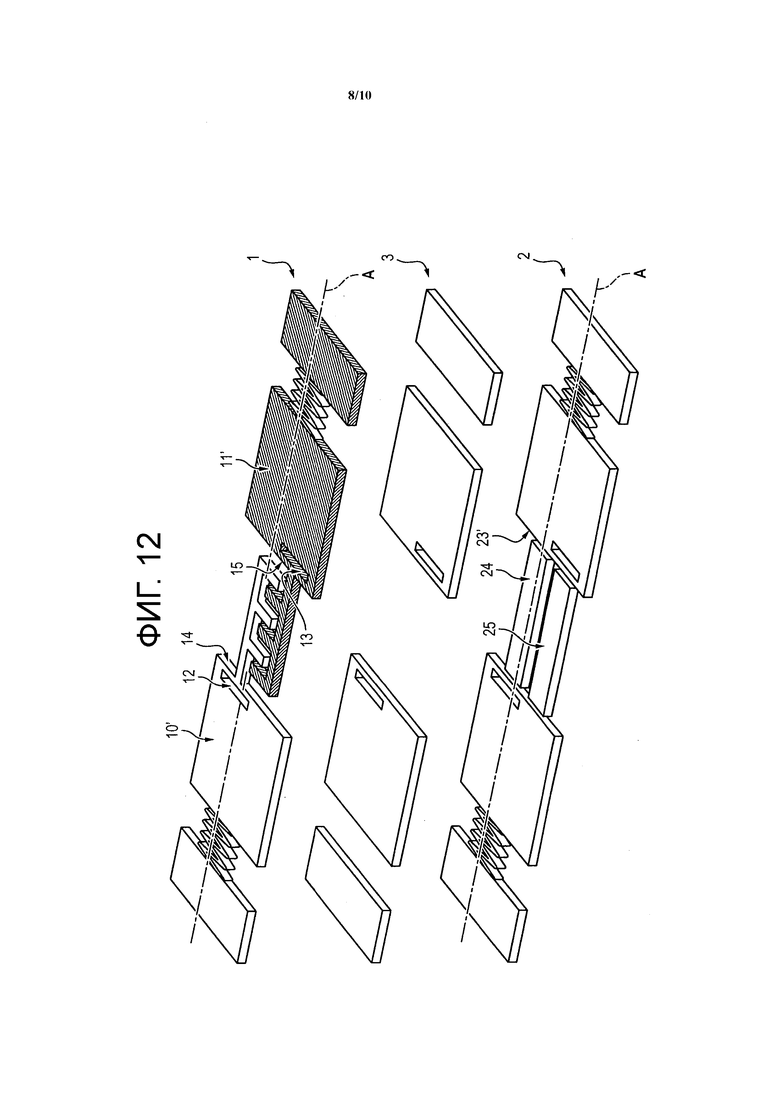
на фиг. 12 показано устройство, изображенное на фиг. 10, вид в перспективе сверху с пространственным разделением деталей;
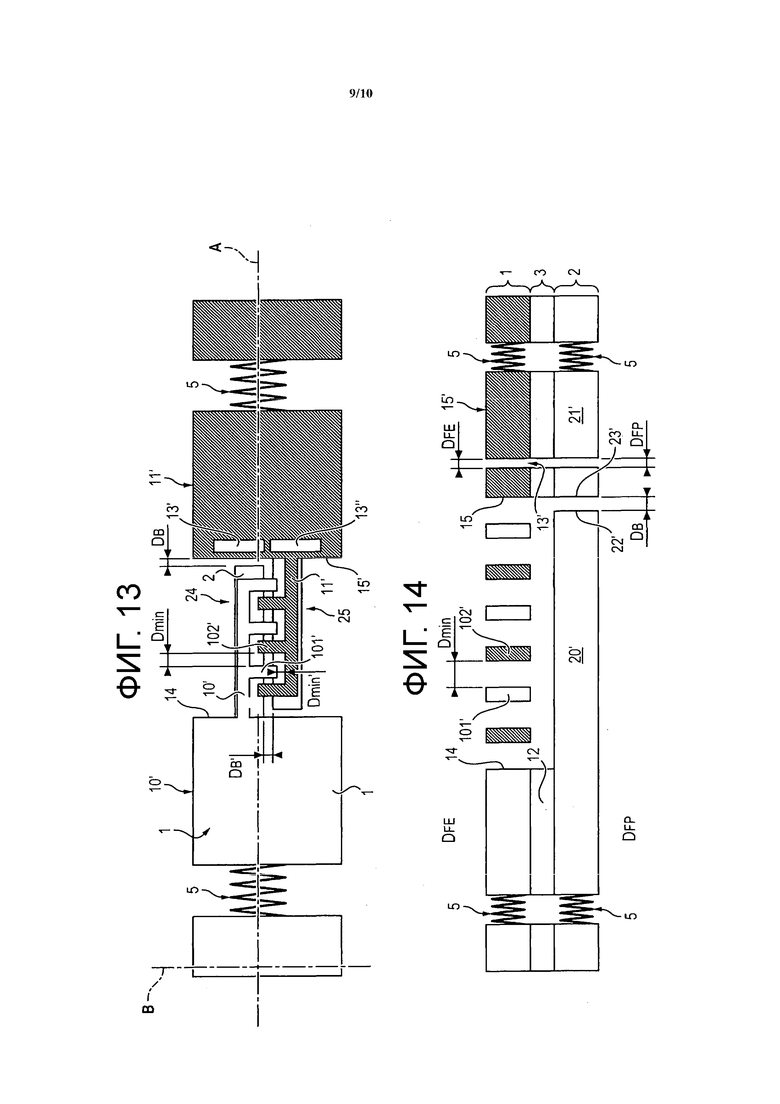
на фиг. 13 схематично показан упорный набор согласно версии второго варианта осуществления, где плоскость набора электродов показана сверху;
на фиг. 14 показано устройство, изображенное на фиг. 13, вид в разрезе по плоскости, перпендикулярной к плоскости набора, при этом плоскость разреза обозначена осями А;
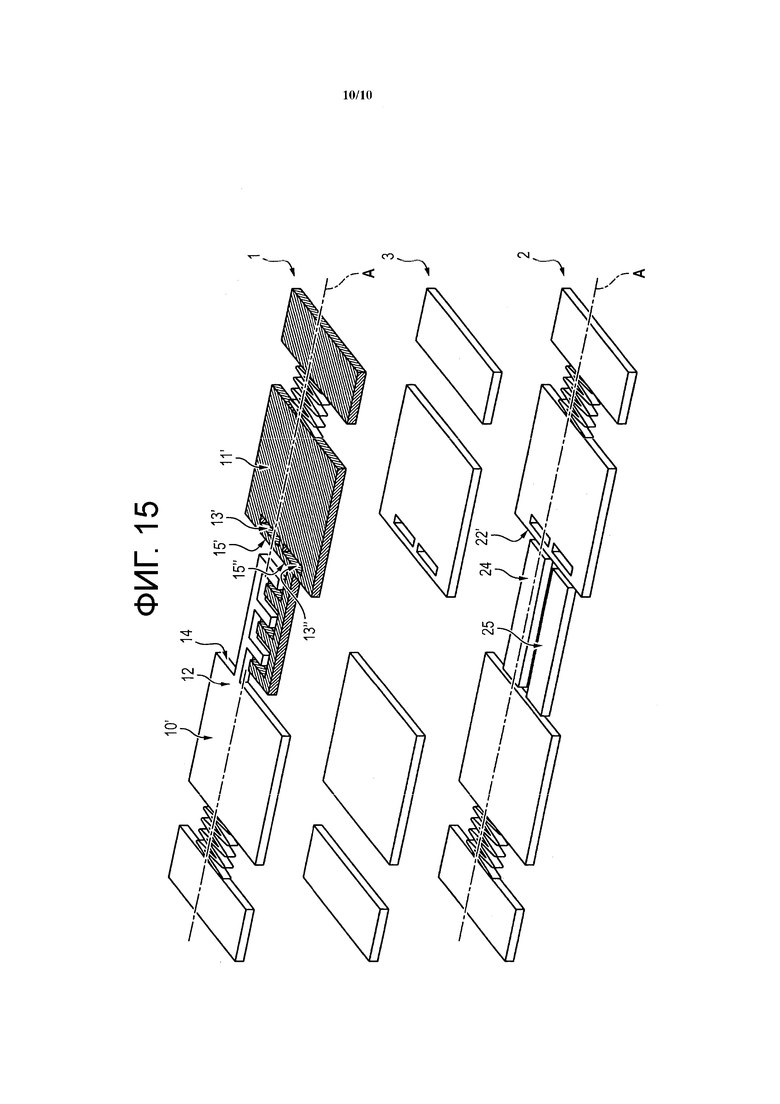
на фиг. 15 показано устройство, изображенное на фиг. 13, вид в перспективе сверху с пространственным разделением деталей.
Осуществление изобретения
На фиг. 1-3 представлен первый вариант осуществления упорного набора в виде слоев в устройстве МЭМС или НЭМС.
На фиг. 1 набор показан сверху вдоль оси наблюдения, перпендикулярной к набору. На фиг. 2 он показан сбоку в разрезе по плоскости, перпендикулярной к плоскости набора и обозначенной пунктирной осью А на фиг. 1 и двумя пунктирными осями А на фиг. 3. Наконец, он показан в перспективе сверху и в разборе на фиг. 3, где указаны два направления, параллельных направлению А, чтобы обозначить разрез, показанный на фиг.2.
На расположенном сверху первом слое 1 левый электрод 10 содержит монолитную левую плоскую часть и правую часть, образующую электростатическую гребенку, неподвижно соединенную с левой частью. Левый электрод 10 считается подвижным только в первом направлении, обозначенном осью А. Правый электрод 11, расположенный напротив левого электрода 10, имеет аналогичную конструкцию с монолитной правой плоской частью и с левой частью, образующей две симметричные боковые электростатические гребенки, которые могут вступать в электростатическое взаимодействие с гребенкой электрода 10. Правый электрод 11 считается в данном случае неподвижным.
В этом первом варианте осуществления, когда будет идти речь о перемещении электрода 10 или об относительном перемещении обоих электродов 10 и 11, будет рассмотрено перемещение только в этом первом направлении, обозначенном осью А. Оба электрода 10 и 11 изготовлены, например, из кремния. В данном варианте осуществления они считаются не деформирующимися вдоль направления А.
Левый электрод поляризован иначе, чем правый электрод, поэтому контакт между любым из концов электрода 10 и любым из концов электрода 11 может привести к короткому замыканию и/или к электростатическом разряду, что может вызвать необратимое повреждение упорного набора и даже электроники управления/считывания по причине возникшего короткого замыкания. Кроме того, риски отказа существуют, даже если электроды 10 и 11 не входят в прямой контакт, а сближаются на короткое расстояние (порядка микрометра), достаточно малое, чтобы создать пробивное поле в воздухе и вызвать явление микро-искрения.
Слой 3 представляет собой электроизоляционный промежуточной слой. Этот слой расположен под слоем 1 и виден только на фиг. 2 и 3. Внутри этого слоя находятся левая плоская изоляционная поверхность под левой плоской частью электрода 10 и правая плоская изоляционная поверхность под правой плоской частью электрода 11. Центральная часть слоя 1, содержащая чередующиеся зубцы гребенки электрода 10 и гребенки электрода 11, оставлена без нижележащего изоляционного элемента в слое 3.
Под слоем 3 расположен слой 2 полупроводника. Именно этот подслой 2 содержит упорный элемент. Левый подвижный плоский элемент 20 расположен соответственно левому электроду 10. В данном случае подвижный плоский элемент 20 имеет такую же ширину в направлении, перпендикулярном к направлению А, как и электрод 10. Подвижный элемент 20 проходит на большее расстояние вправо на фиг. 1 в сторону находящегося напротив электрода 11, чем правый край левой плоской части электрода 10. Таким образом, подвижный элемент 20 доходит вправо до упорного элемента 24, неподвижно соединенного с подвижным элементом 20 и образующего его правый наружный край. Упорный элемент 24 не обязательно расположен по всей ширине подвижного элемента 20 и электрода 10.
Таким образом, упор 24 выступает из подвижного элемента 20 в направлении А. В данном случае упор 24 находится под электродом 10 и, в частности, под гребенкой, которая выступает из указанного электрода. Однако, в альтернативном варианте, упор 24 может выступать из подвижного элемента 20 в месте, которое может не находиться под гребенкой. Например, упор 24 может находиться под левой сплошной частью электрода 10.
Другим важным признаком системы является то, что подвижный элемент 20 механически соединен с электродом 10, в частности, во время своего поступательного движения в направлении А. В своем поступательном движении в этом направлении подвижный элемент 20 и электрод 10 удерживаются средствами 5 подвески, расположенными, с одной стороны, в первом слое 1 и, с другой стороны, во втором слое 2 (но не в изоляционном слое 3). Эти средства 5 подвески позволяют электроду 10 и плоскому элементу 20 поступательно перемещаться, оставаясь механически соединенными, относительно неподвижной части устройства МЭМС, находящейся сзади средств 5 подвески.
Таким образом, левая изоляционная плоская поверхность слоя 3 обеспечивает механическое соединение электрода 10 с подвижным элементом 20. Она обеспечивает также электрическую изоляцию между электродом 10 и подвижным элементом 20, чтобы электрические потенциалы элементов 10 и 20 были независимыми в любом положении узла, образованного элементами 10 и 20, в направлении А.
Внутри слоя 2 напротив подвижного элемента 20 и, в частности, упорного элемента 24 расположен правый плоский подвижный элемент 21, вертикально совмещенный с правым электродом 11. Так же, как и в случае левого подвижного элемента 20, подвижный элемент 21 простирается своим левым краем 23 на большее расстояние влево к электроду 10, чем правая плоская часть правого электрода 11. Подвижный элемент 21 неподвижно соединен с электродом 11, в частности, во время своего поступательного движения в направлении А. Предпочтительно правая плоская изоляционная поверхность слоя 3 тоже неподвижно соединена с электродом 11 и с подвижным элементом 21.
Таким образом, левый край 23 находится напротив упорного элемента 24 на расстоянии DB от упорного элемента 24 в направлении А, при этом расстояние DB является в данном случае первым расстоянием свободного хода.
Первое расстояние DB свободного хода соответствует максимальной амплитуде перемещения в первом направлении А упора 24 относительно подвижного элемента 23 (и, следовательно, левого электрода 10 относительно правого электрода 11). Во время ударного воздействия, приводящего к перемещению подвижного элемента 20 по отношению к элементу 21 и электрода 10 по отношению к электроду 11, упорный элемент 24 прерывает сближение этих элементов в направлении А и упирается в правый край 23, чтобы в этом состоянии максимального сближения электрод 10 не оказался на расстоянии от электрода 11, меньшем, чем расстояние D2. Расстояние D2 максимального сближения между электродами предусмотрено с учетом риска явления микро-искрения между соседними концами двух электродов 10 и 11. Это расстояние D2 зависит от условий применения, в частности, от уровней потенциала, прикладываемого на уровне электродов 10 и 11. Как правило, оно составляет порядка микрометра. Это расстояние D2 на фиг. 1-3 не показано. Таким образом, минимальное расстояние Dmin между электродами 10 и 11 в состоянии отсутствия воздействия (то есть в отсутствие состояния максимального сближения) превышает сумму первого расстояния DB свободного хода в первом направлении А и расстояния D2, зависящего от условий применения. Это расстояние Dmin между электродами 10 и 11 в направлении А измерено в этом примере между правым краем зубца 101 гребенки электрода 10 и левым краем зубца 102 гребенки электрода 11, при этом обозначения 101 и 102 показаны на фиг. 2 настоящей заявки. Поскольку электроды могут содержать, например, классические электростатические гребенки небольшого размера, потребуется предусмотреть очень небольшое расстояние свободного хода, как правило, порядка 5 микрон.
Что тоже очень важно, контакт между упорным элементом 24 и левым краем 23 правого подвижного элемента 21 не должен характеризоваться теми же рисками короткого замыкания, электростатического разряда и электростатического залипания, что и контакт между двумя свободными концами электродов 10 и 11, такими как концы 101 и 102. В представленном примере все элементы подслоя 2 поляризованы одинаково. Изоляционный промежуточный слой 3 обеспечивает независимость между электрическими потенциалами элементов слоя 1 и электрическими потенциалами элементов слоя 2, хотя и существует зависимость между положениями некоторых из этих элементов в направлении А.
На фиг. 4-6 представлена первая версия первого варианта осуществления, показанного на фиг. 1-3. Так же, как и на фиг. 1-3: набор показан сверху на фиг. 4 вдоль оси наблюдения, перпендикулярной к набору, сбоку на фиг. 5 в разрезе по плоскости, перпендикулярной к плоскости набора и обозначенной пунктирной осью А, и, наконец, в перспективе и в разборе на фиг. 6.
Выполнение слоев 1, 2 и 3, электродов 10 и 11 и соответствующих плоских элементов 20 и 11 аналогично выполнению, показанному на фиг. 1-3. Выполнение упора 24, выступающего из плоского элемента 20, тоже аналогично за исключением того, что упор является гибким по сравнению с предыдущим вариантом осуществления. В данном случае в месте крепления упорного элемента 24 выполнена полость 26 с небольшим отступом относительно правого наружного края плоского элемента 20. Полость 26 выполнена не по всей ширине плоского элемента 20, но она должна быть выполнена по ширине, строго превышающей ширину упорного элемента 24, чтобы обеспечивать подвижность упора 24 относительно плоского элемента 20 в направлении А. Таким образом, полость 26 образует с двух сторон от упора 24 две свободные встроенные пластинки. Кроме того, упор 24 не может деформироваться в направлении, перпендикулярном к направлению А (и вертикальном на фигурах), так как он удерживается двумя свободными встроенными пластинками с двух сторон от упора 24. Контрупор (поверхность 23 напротив упора 24) остается недеформирующимся в направлении А. Следует отметить, что гибкий упор 24 в данном случае образован двумя свободными встроенными пластинками, но он может быть выполнен любым другим способом, известным в электромеханических устройствах (в виде шеврона…).
Оба плоских элемента 20 и 21 и вместе с ними электроды 10 и 11, механически связанные с указанными плоскими элементами, могут сближаться друг с другом в ответ на воздействие, будучи удерживаемыми при этом средствами 5 подвески. Если сближение является достаточным, упор 24 может войти в контакт с находящейся напротив поверхностью 23, затем плоские элементы 20 и 21 могут еще сблизиться под действием перемещения влево гибкой пластинки, поскольку полость 26 не является закрытой. Полость 26 выполнена только во втором плоском слое, так как первый плоский слой не является сплошным в зоне, находящейся вертикально над полостью 26 (зона электростатических гребенок электродов). Полость 26 имеет размер в направлении А, который соответствует расстоянию прогиба DFP плоского элемента, показанному на фиг. 5 и соответствующему максимальной деформации плоского элемента 20 в направлении А.
Таким образом, в ответ на воздействие электроды 10 и 11 и, в частности, зуб 101 гребенки электрода 10 и зуб 102 гребенки электрода 11 могут сблизиться на максимальное расстояние DB (первое расстояние свободного хода), к которому добавляется расстояние прогиба DFP плоского элемента. В этой версии первого варианта осуществления размерность набора предусмотрена таким образом, чтобы в состоянии отсутствия воздействия минимальное расстояние Dmin между электродами 10 и 11 в направлении А, рассматриваемое в данном случае между зубьями 101 и 102, превышало сумму расстояний DB и DFP. Таким образом, даже в случае воздействия, которое привело бы к сближению электродов 10 и 11, зубья 101 и 102 не могут соприкоснуться. Можно также учитывать расстояние D2 появления микро-искрения, сверх которого существует риск электрической дуги в тонком слое газа, разделяющем зубья 101 и 102. В этом случае расстояние Dmin должно превышать DB + DFP + D2, чтобы даже в состоянии, в котором оба электрода 10 и 11 сблизились, можно было избежать неисправности, связанной с микро-искрением.
На фиг. 7-9 представлена вторая версия первого варианта осуществления, показанного на фиг. 1-3. Так же, как и на фиг. 1-3: набор показан сверху на фиг. 7 вдоль оси наблюдения, перпендикулярной к набору, сбоку на фиг. 8 в разрезе по плоскости, перпендикулярной к плоскости набора, обозначенной пунктирной осью А, и, наконец, в перспективе сверху и в разборе на фиг. 9.
В этой версии форма электродов слоя 1 и упора 24 подобна форме, описанной со ссылками на фиг. 1-3.
Как и в описанной выше первой версии, в слой 2 используют гибкую пластину для достижения способности к частичной деформации в первом направлении А. Но в отличие от первой версии, описанной со ссылками на фиг. 4-6, полость не выполняют в месте крепления упора 24. В данном случае полость 27 выполняют в плоском элементе 21 в зоне, находящейся напротив упора 24 (то есть в зоне контрупора). Удлиненную полость выполняют с небольшим отступом относительно левого наружного края плоского подвижного элемента 21 по ширине в направлении, перпендикулярном к направлению А, меньшей общей ширины плоского элемента 21, но превышающей ширину упорного элемента 24, чтобы получить двойную встроенную гибкую пластинку, при этом часть плоского элемента 21, находящаяся слева от полости 27, может деформироваться в первом направлении А. Кроме того, полученная таким образом гибкая пластинка не может деформироваться в направлении, перпендикулярном к направлению А (вертикальном на фигурах), поскольку удерживается краями полости 27. Сам упор 24 остается недеформирующимся в направлении А.
Оба плоских элемента 20 и 21 и электроды 10 и 11 (механически связанные с указанными плоскими элементами) могут еще сблизиться друг с другом в ответ на воздействие, будучи удерживаемыми средствами 5 подвески.
Если сближение является достаточным, упор 24 может войти в контакт с находящейся напротив поверхностью 23, затем плоские элементы могут еще сблизиться под действием перемещения гибкой пластинки вправо, при этом полость 27 является закрытой. Полость 27 тоже выполнена только во втором слое 2 и имеет размер, который соответствует расстоянию прогиба DFP плоского элемента, показанному на фиг. 5. Это расстояние прогиба плоского элемента представляет собой максимальную деформацию плоского элемента 21 в направлении А.
Таким образом, в ответ на воздействие электроды 10 и 11 и, в частности, зуб 101 гребенки электрода 10 и зуб 102 гребенки электрода 11 могут сблизиться на максимальное расстояние DB (первое расстояние свободного хода), к которому добавляется расстояние прогиба DFP плоского элемента. В состоянии отсутствия воздействия минимальное расстояние Dmin между электродами 10 и 11 в направлении А, рассматриваемое в данном случае между зубьями 101 и 102, превышает сумму расстояний DB и DFP. Если факультативно возникает потребность в учете рисков неисправностей, связанных с микро-искрением, можно определить минимальное расстояние D2 между концами электродов, сверх которого существует указанный риск. В этом случае размерность набора рассчитывают таким образом, чтобы Dmin превышало сумму DB + DFP + D2.
На фиг. 10-12 представлен второй вариант осуществления набора в виде слоев, в котором выполнение электродов и упоров отличается от всех ранее описанных фигур. В данном случае показаны электроды 10’ и 11’.
Набор показан сверху на фиг. 10 вдоль оси, перпендикулярной к набору. Он показан сбоку на фиг. 11, в разрезе по плоскости, перпендикулярной к плоскости набора и обозначенной пунктирной осью А на фиг. 10 и двумя пунктирными осями А на фиг. 12. Наконец, он показан в перспективе сверху и в разборе на фиг. 12, где показаны два направления, параллельных направлению А, чтобы обозначить разрез, показанный на фиг.11.
Цифровые обозначения, используемые на фиг. 1-3 и определенные выше, можно использовать на фиг. 10-12 для соответствующих элементов в наборе согласно второму варианту осуществления.
Этот второй вариант осуществления отличается от первого варианта осуществления тем, что электроды 10’ и 11’ и соответствующие плоские элементы 20 и 21 могут частично деформироваться в первом направлении А. В данном случае предложен предпочтительный вариант осуществления, в котором электростатические гребенки электродов, показанных на фиг. 10-12, являются подвижными в направлении А по отношению к остальной части содержащих их электродов.
Кроме того, этот второй вариант осуществления отличается также от первого варианта осуществления тем, что электроды 10’ и 11’ и, в частности, электростатические гребенки являются подвижными относительно друг друга во втором направлении В, перпендикулярном к направлению А и содержащемся в плоскости электродов 10’ и 11’. Например, не показанные на фигурах средства подвески, например, подобные средствам 5 подвески, могут обеспечивать подвижность электродов 10’ и 11’ в направлении В.
В данном случае левый электрод 10’ слоя 1 содержит левую плоскую часть и электростатическую гребенку на правой части. Симметрично, правый электрод 11’ содержит правую плоскую часть и электростатическую гребенку на левой части. Обе электростатические гребенки, соответствующие электродам 10’ и 11’, расположены таким образом, чтобы в состоянии отсутствия воздействия их зубья перемежались, не соприкасаясь друг с другом и, в частности, не соприкасаясь друг с другом в первом направлении А и во втором направлении В.
Левый электрод 10’ отличается от левого электрода 10 из предыдущего варианта осуществления тем, что в его левой части выполнена сквозная полость 12 прямоугольной формы. Она называется сквозной в том смысле, что выполнена по всей толщине набора во всех трех слоях 1, 2 и 3. Таким образом, этот вариант осуществления существенно отличается от вариантов осуществления, описанных со ссылками на фиг. 4-9, в которых полость выполнена только в нижнем слое 2, и электроды 10 и 11 не могут деформироваться в направлении А. Сквозная полость 12 выполнена вблизи правого наружного края 14 левой плоской части электрода 10’, но с небольшим отступом относительно края 14. Эта полость позволяет наружному краю 14 образовать гибкую пластинку. Гибкая пластинка может реагировать на возможное вибрационное воздействие на электрод 10’, перемещаясь поступательным движением в направлении А на величину максимальной амплитуды, которая соответствует расстоянию прогиба DFE электрода, а также расстоянию прогиба DFP плоского элемента (поскольку одновременно часть электрода 10’ и часть плоского элемента 20 могут деформироваться на уровне гибкой пластинки). Когда гибкая пластинка 14 перемещается таким поступательным движением, то, поскольку к тому же материал части электрода 10’, образующей электростатическую гребенку, не может деформироваться в направлении А, электростатическая гребенка может перемещаться тоже поступательным движением в направлении А на величину амплитуды, которая не превышает расстояние прогиба DFЕ электрода. Кроме того, гибкая пластинка 14 не может деформироваться в направлении В, поскольку удерживается краями сквозной полости 12.
Аналогично, правый электрод 11’ имеет на левом наружном крае своей правой плоской части сквозную полость 13, которая образует гибкую пластинку 15. Гибкая пластинка 15, как и гибкая пластинка 14, может деформироваться при поступательном движении в направлении А на величину максимальной амплитуды, равную расстоянию прогиба электрода DFЕ.
В этом втором примере расстояние Dmin между электродами 10’ и 11’ измеряют между правым краем зуба 101’ гребенки электрода 10’ и левым краем зуба 102’ гребенки электрода 11’, и эти обозначения 101’ и 102’ показаны на фиг. 11. Поскольку электроды 10’ и 11’ поляризованы по-разному, как в предыдущем примере, необходимо, чтобы они не входили в контакт, что могло бы нарушить электромагнитную функциональность системы. При этом необходимо не только избегать, чтобы электроды входили в контакт, но также чтобы их концы не сближались слишком близко (на расстояние, например, порядка микрометра), что избегать явлений микро-искрения. В данном случае промежуточный слой 2 выполняет роль электрической изоляции аналогично роли, которую он выполняет в предыдущем примере. Наконец, аналогично предыдущему примеру, слой 3 содержит упорный элемент, который не позволяет электродам 10’ и 11’ войти в контакт во время действия вибраций или удара, которое может привести в движение электроды 10’ и 11’ относительно друг друга в первом направлении А.
В данном случае показанный подслой 2 выполнен иначе, чем в предыдущем примере. Подслой 2 тоже содержит левый плоский элемент 20’, неподвижно соединенный с электродом 10’, и правый плоский элемент 21’, неподвижно соединенный с электродом 11’, при этом плоские элементы 20’ и 21’ являются подвижными относительно друг друга в первом направлении А.
В отличие от левого плоского элемента 20, показанного на фиг. 1-3, левый плоский элемент 20’ в этом примере меняет ширину вблизи наружного края 14 электрода 10’. Он имеет ветвь 24, образующую упорный элемент и проходящую до правого края 22’ упорного элемента. Упорный элемент 24 не находится, как в предыдущем примере, в центральном положении в зоне, находящейся между левым плоским элементом и правым плоским элементом в подслое 2, а находится на правом краю ветви 24, который слегка отступает относительно находящегося напротив края 23 правого плоского элемента 21’.
Как показано на фиг. 10, упорный элемент 24 и, в частности, его конец 22’ находится в продолжении сквозной полости 12 в первом направлении А, но не в продолжении сквозной полости 13, поэтому напротив конца 22’ находится не деформирующаяся часть правого элемента 21’. Кроме того, ширина сквозной полости 12 (в направлении В) превышает ширину упора 24. Таким образом, место крепления упора 24 соответствует гибкой пластинке в направлении А, но его конец 22’ не находится напротив гибкой пластинки.
Симметрично, правый элемент 21’ имеет упорный элемент 25, проходящий от края, соответствующего вертикально наружному краю 15 электрода 11’, и расположенный в продолжении сквозной полости 13, и имеет конец упорного элемента, обращенный к не деформирующемуся краю левого элемента 20’. Упорный набор согласно этому второму варианту осуществления имеет, таким образом, два упорных элемента 24 и 25.
Расстояние между упорным элементом 24 и находящимся напротив краем 23’ правого плоского элемента 21’ или между упорным элементом 25 и находящимся напротив краем левого плоского элемента 20’ соответствует первому расстоянию DB свободного хода такого же значения, что и первое расстояние DB свободного хода из предыдущего примера. Кроме того, необходимо отметить, что расстояние прогиба DFЕ электрода (общая максимальная деформация на уровне электродов), которое является расстоянием прогиба, применяемым для полостей 12 и 13 в слое 1, и расстояние прогиба DFP плоского элемента (общая максимальная деформация на уровне упорных элементов), которое является расстоянием прогиба, применяемым для полостей 12 и 13 в слое 2, равны между собой. Сквозные полости 12 и 13 имеют постоянные размеры по всей толщине набора: крепление электростатических гребенок может деформироваться в направлении А на такую же длину, что и крепление упоров.
Важным признаком является то, что первое расстояние свободного хода DB, которое соответствует максимальной амплитуде перемещения в первом направлении А конца 22’ относительно находящегося напротив элемента 23’ (и, следовательно, левого электрода 10’ относительно правого электрода 11’), является таким, чтобы сумма этого расстояния свободного хода и максимальной амплитуды деформации (расстояния прогиба электрода DFЕ) обоих электродов 10’ и 11’ относительно друг друга была меньше минимального расстояния в направлении А между левым электродом 10’ и правым электродом 11’.
Таким образом, когда оба электрода 10’ и 11’ сближаются под действием внутренней силы (электростатическая сила) или внешней силы (ускорение, удар), то зубья электростатических гребенок (например, зубья 101’ и 102’) сначала сближаются на расстояние, которое соответствует свободному ходу упорных элементов 24 и 25. Затем, если сближение продолжается, основание упорного элемента 24 может под действием нажатия со стороны противоположного конца 22’ упора 24 нажать на гибкую пластинку 24, находящуюся в месте крепления упора 24, и привести к прогибу зубьев гребенки электрода 10’.
Применяемый в данном случае критерий размерности является более ограничительным, чем в предыдущем примере, так как, рассчитывая минимальное расстояние между двумя электродами 10’ и 11’ в первом направлении А, учитывают не только первое расстояние свободного хода электродов 10’ и 11’, допускаемое выполнением упора 24, но так же максимальную амплитуду относительной деформации двух электростатических гребенок, выступающих соответственно от электродов 10’ и 11’. Так, расстояние Dmin между двумя электродами 10’ и 11’ в первом направлении А, показанное в данном случае между зубом 101’ гребенки электрода 10’ и зубом 102’ гребенки электрода 11’, должно превышать DFЕ + DB. Если необходимо учитывать риски микро-искрения между зубьями электростатических гребенок электродов 10’ и 11’, можно определить минимальное расстояние D2 между концами электродов, сверх которого существует этот риск. При этом размеры набора рассчитывают таким образом, чтобы Dmin превышало сумму DB + DFP + D2.
Во время удара, приводящего к перемещению подвижного элемента 20’ по отношению к элементу 21’ и электрода 10’ по отношению к электроду 11’, такая размерность позволяет упорному элементу 24 прервать сближение этих элементов в направлении А за счет упора в правый край 23’, прежде чем электрод 10’ не окажется достаточно близко к электроду 11’, чтобы стать причиной электростатического разряда или электрических микродуг и повреждения устройства МЭМС.
Кроме того, как было указано выше, электроды 10’ и 11’ являются подвижными относительно друг друга не только в первом направлении А, но и во втором направлении В, в данном случае перпендикулярном к первому направлению А. Оба упорных элемента 24 и 25, форма и расположение которых относительно плоских элементов 20’ и 21’ были описаны выше, отстоят друг от друга в этом втором направлении В, оставляя второе расстояние свободного хода DB’ в направлении В.
При этом набор выполнен таким образом, чтобы в состоянии отсутствия воздействия первый электрод 10’ находился на расстоянии Dmin’ относительно второго электрода 11’ во втором направлении В, которое превышает это второе расстояние свободного хода DB’, и чтобы оба электрода не могли войти в контакт также при сближении во втором направлении В.
Таким образом, в данном случае критерий размерности Dmin’ > DB’ применяют дополнительно к критерию, который определяет максимальное перемещение электродов и их размерность в первом направлении А.
Преимуществом этого второго варианта осуществления с возможностью частичной деформации электродов является то, что его можно применять для устройств с большими амплитудами перемещения по сравнению с воздушным зазором электродов в результате удара. В частности, МЭМС-устройства, предназначенные для применения в сложных системах, требуют наличия воздушных зазоров небольшого размера и больших масс, как правило, в инерциальных датчиках, которые имеют большую амплитуду перемещения в результате удара по сравнению с воздушным зазором электродов.
На фиг. 13-15 представлена версия второго варианта осуществления, показанного на фиг. 10-12.
Набор показан сверху на фиг. 13 вдоль оси наблюдения, перпендикулярной к набору. Он показан сбоку на фиг. 14 в разрезе по плоскости, перпендикулярной к набору, обозначенной пунктирной осью А на фиг. 13 и двумя пунктирными осями А на фиг. 15. Наконец, он показан в перспективе сверху и в разборе на фиг. 15, где показаны два направления, параллельных направлению А, чтобы обозначить разрез, показанный на фиг.14.
В этой версии второго варианта осуществления форма электродов слоя 1 подобна форме, описанной ранее со ссылками на фиг. 10-12. Форма упоров 24 и 25 внутри слоя 2 тоже не изменилась.
Однако в этой версии в первом направлении А может частично деформироваться только электрод 11’, при этом электростатическая гребенка этого электрода является подвижной в направлении А относительно своего основания. Кроме того, электроды 10’ и 11’ остаются подвижными относительно друг друга во втором направлении В, перпендикулярном к направлению А и содержащемся в плоскости этих электродов.
В частности, сквозная полость 12, описанная со ссылками на фиг. 10-12 и выполненная в электроде 10’ и в нижележащих слоях, здесь не выполнена. Сквозная полость 13, показанная на фиг. 10-12, отсутствует в версии на фиг. 13-15. Описанный в данном случае набор содержит две сквозные полости 13’ и 13”, выполненные с одинаковым отступом относительно левого наружного края электрода 11’ и с шириной в направлении В, превышающей ширину концов упорных элементов 24 и 25, чтобы получить две гибкие пластинки 15’ и 15” в первом направлении А.
Сквозная полость 13’ находится напротив конца 22’ упорного элемента 24 (форма упорного элемента 24 идентична форме из представленного второго варианта осуществления). Что касается сквозной полости 13”, то она выполнена в месте крепления упорного элемента 25. Обе сквозные полости 13’ и 13” и, следовательно, обе гибкие пластинки 15’ и 15” являются независимыми и разделены жесткой перегородкой. Кроме того, длинные упорные элементы 24 и 25 остаются без изменения по сравнению с описанным выше вторым вариантом осуществления.
Таким образом, когда оба электрода 10’ и 11’ сближаются в первом направлении А под действием внешнего механического напряжения, зубья электростатических гребенок (например, зубья 101’ и 102’) сначала сближаются до расстояния, которое соответствует первому расстоянию свободного хода DB упорных элементов 24 и 25, как и в первой версии второго варианта осуществления.
С другой стороны, поведение зубьев электростатических гребенок отличается, когда сближение в первом направлении А продолжается: основание упорного элемента 24 не может заставить прогнуться зубья гребенки электрода 10’ в отсутствие сквозной полости 12 из версии, показанной на фиг. 10-12.
Вместо этого присутствие новой сквозной полости 13’ напротив конца 22’ упорного элемента, выполненной в корпусе находящегося напротив электрода 11’, приводит к тому, что конец 22’ упора 24 может нажать на гибкую пластинку 15’, чтобы упор 24 продолжил свое продвижение к электроду 11’ в первом направлении А. Таким образом, зубья гребенки электрода 10’ могут прогнуться в направлении, обратном к направлению прогиба, получаемого во втором варианте осуществления. В отличие от того, что происходит во втором варианте, прогиб, получаемый в этом третьем варианте осуществления, не может привести к сближению зубьев электростатических гребенок, например, зубьев 101’ и 102’.
Таким образом, применяемый в данном случае критерий размерности является менее ограничительным, чем в предыдущем примере. Учитывают первое расстояние свободного хода электродов 10’ и 11’, обеспечиваемое выполнением упоров 24 и 25. Расстояние Dmin между двумя электродами 10’ и 11’ в первом направлении А, показанное в данном случае между зубом 101’ гребенки электрода 10’ и зубом 102’ гребенки электрода 11’, должно превышать DB. Аналогично представленным выше версиям, можно учитывать риск микро-искрения между электродами, и в этом случае можно принять во внимание минимальное расстояние Dmin в состоянии отсутствия воздействия между электродами 10’ и 11’, превышающее сумму первого расстояния свободного хода DB электродов и расстояния D2, сверх которого считается, что существует риск микро-искрения. В этом случае минимальное расстояние Dmin между концами электродов в состоянии отсутствия воздействия должно превышать сумму DB + D2.
Кроме того, в данном случае электроды 10’ и 11’ тоже являются подвижными относительно друг друга не только в первом направлении А, но также во втором направлении В, при этом относительное расположение обоих упорных элементов 24 и 25 в этом втором направлении В должно также стать предметом дополнительного критерия размерности.
Если и здесь обозначить DB’ второе расстояние свободного хода между двумя упорными элементами 24 и 25 в этом втором направлении В, набор выполняют таким образом, чтобы в состоянии отсутствия воздействия первый электрод 10’ находился на расстоянии Dmin’ относительно второго электрода 11’ во втором направлении В, которое превышает это второе расстояние свободного хода DB’.
Таким образом, сохраняют второй критерий размерности Dmin’ > DB’ из второго варианта осуществления.
Следует отметить, что в описанных здесь иллюстративных примерах представлен слой, содержащий электроды, обеспечивающие ожидаемую электромеханическую функциональность системы в виде набора, над слоем, содержащим упорный элемент, чтобы препятствовать физическому контакту электродов, но можно предусмотреть и другое расположение, где слой, содержащий электроды, находится под слоем, содержащим упорные элементы.
Изобретение относится к технической области электромеханических устройств. Устройство МЭМС или НЭМС типа датчика или привода, имеющее упорный набор, включающий в себя: - первый плоский слой, содержащий первый плоский электрод, предназначенный для подачи на него первого электрического потенциала, и второй плоский электрод, предназначенный для подачи на него второго электрического потенциала, отличного от первого потенциала, при этом первый плоский электрод является подвижным относительно второго плоского электрода в первом направлении, параллельном первому плоскому слою, - второй плоский слой, наложенный на первый плоский слой и электрически изолированный от первого плоского слоя по меньшей мере одним промежуточным слоем из изоляционного материала, при этом второй плоский слой содержит первый плоский элемент, механически соединенный с первым плоским электродом, и второй плоский элемент, механически соединенный со вторым плоским электродом, при этом дополнительно содержит по меньшей мере один упорный элемент, проходящий от первого плоского элемента или от второго плоского элемента в первом направлении и выступающий относительно указанного плоского элемента в первом направлении, при этом упорный элемент, который проходит от одного из плоских элементов, предназначен для подачи на него такого же электрического потенциала, что и на находящуюся напротив поверхность, принадлежащую к другому из плоских элементов, при этом упорный элемент и электроды выполнены так, чтобы упорный элемент входил в контакт с находящейся напротив поверхностью и блокировал сближение двух плоских электродов в первом направлении во время воздействия. Технический результат заключается обеспечении механической прочности во время работы этих двух подвижных относительно друг друга элементов и одновременно сохранности их электромеханической функциональности после вибрационного или ударного воздействия, которое приводит к их движению в плоскости. 9 з.п. ф-лы, 15 ил.
1. Устройство МЭМС или НЭМС типа датчика или привода, имеющее упорный набор, включающий в себя:
первый плоский слой (1), содержащий первый плоский электрод (10), предназначенный для подачи на него первого электрического потенциала, и второй плоский электрод (11), предназначенный для подачи на него второго электрического потенциала, отличающегося от первого потенциала,
при этом первый плоский электрод (10) является подвижным относительно второго плоского электрода (11) в первом направлении (А), параллельном первому плоскому слою,
второй плоский слой (2), наложенный на первый плоский слой (1) и электрически изолированный от первого плоского слоя (1) по меньшей мере одним промежуточным слоем (3) из изоляционного материала, при этом второй плоский слой (2) содержит первый плоский элемент (20), механически соединенный с первым плоским электродом (10), и второй плоский элемент (21), механически соединенный со вторым плоским электродом (11),
отличающееся тем, что дополнительно содержит по меньшей мере один упорный элемент (24), проходящий от первого плоского элемента (20) или от второго плоского элемента (21) в первом направлении (А) и выступающий относительно указанного плоского элемента в первом направлении (А),
при этом упорный элемент (24), который проходит от одного из плоских элементов, предназначен для подачи на него такого же электрического потенциала, что и на находящуюся напротив поверхность (23), принадлежащую к другому из плоских элементов (21),
при этом упорный элемент (24) и электроды выполнены таким образом, чтобы упорный элемент (24) входил в контакт с находящейся напротив поверхностью (23) и блокировал сближение двух плоских электродов (10, 11) в первом направлении (А) во время воздействия.
2. Устройство МЭМС или НЭМС по п. 1, в котором упорный элемент и электроды выполнены таким образом, чтобы в состоянии отсутствия воздействия любой свободный конец (101) первого плоского электрода (10) находился относительно ближайшего конца (102) второго плоского электрода в первом направлении (А) на минимальном расстоянии (Dmin), превышающем первое расстояние свободного хода (DB), при этом указанное расстояние определено как минимальное расстояние между упорным элементом (24) и находящейся напротив поверхностью.
3. Устройство МЭМС или НЭМС по п. 2, в котором минимальное расстояние (Dmin) превышает сумму первого расстояния свободного хода (DB) и второго заранее определенного расстояния, сверх которого существует риск потери изолирующего характера газа, окружающего электроды (10, 11), и может возникнуть короткое замыкание между двумя концами (101, 102) электродов.
4. Устройство МЭМС или НЭМС по любому из пп. 1-3, в котором по меньшей мере один первый плоский электрод (11') является по меньшей мере частично деформируемым в первом направлении (А), при этом сумма максимальных возможных деформаций электродов (10', 11') в первом направлении (А) определяет расстояние прогиба (DFE) электрода, при этом минимальное расстояние (Dmin) выбрано таким, чтобы превышать сумму первого расстояния свободного хода (DB) и расстояния прогиба (DFE) электрода.
5. Устройство МЭМС или НЭМС по п. 4, в котором по меньшей мере один первый плоский элемент (20) является по меньшей мере частично деформируемым в первом направлении (А), при этом сумма максимальных возможных деформаций плоских элементов (20, 21) в первом направлении (А) определяет заданное расстояние прогиба (DFP) плоского элемента, при этом минимальное расстояние (Dmin) выбрано таким, чтобы превышать сумму первого расстояния свободного хода (DB) и расстояния прогиба (DFP) плоского элемента.
6. Устройство МЭМС или НЭМС по п. 5, в котором по меньшей мере один из двух плоских элементов (20, 21) является частично деформируемым в первом направлении (А),
при этом во втором плоском слое (2) образована полость (26) в месте крепления упорного элемента (24) и/или образована полость (27) вдоль наружного края поверхности (23), находящейся напротив упорного элемента (24),
при этом расстояние прогиба (DFP) плоского элемента определено как сумма размеров в первом направлении (А) двух полостей (26, 27) или, в случае необходимости, как размер в первом направлении единственной полости, выполненной во втором плоском слое (2).
7. Устройство МЭМС или НЭМС по п. 5, в котором оба плоских электрода (10', 11') и оба плоских элемента (20, 21) являются деформируемыми в первом направлении (А), при этом на первом плоском элементе (21) выполнен первый упорный элемент (25), и на втором плоском элементе (20) выполнен второй упорный элемент (24),
при этом первая сквозная полость (13) выполнена по всей высоте набора в месте крепления первого упорного элемента (25) и с совмещением в первом направлении (А) с указанным первым упорным элементом (25), но не с совмещением в первом направлении (А) со вторым упорным элементом (24), образуя первую гибкую пластинку (14),
при этом вторая сквозная полость (12) выполнена по всей высоте набора в месте крепления второго упорного элемента (24) и с совмещением в первом направлении (А) с указанным вторым упорным элементом (24), но не с совмещением в первом направлении (А) с первым упорным элементом (25), образуя вторую гибкую пластинку (15),
при этом первое расстояние свободного хода (DB) определено как минимальное расстояние между первым упорным элементом (25) и находящейся напротив поверхностью, при этом расстояние прогиба (DFE) электрода определено как сумма размеров двух сквозных полостей (12, 13) в первом направлении (А).
8. Устройство МЭМС или НЭМС по п. 5, в котором на первом плоском элементе (21) выполнен первый упорный элемент (25), и на втором плоском элементе (20) выполнен второй упорный элемент (24),
при этом первая сквозная полость (13') выполнена по всей высоте набора в первом плоском электроде (11') с совмещением в первом направлении (А) с концом (22') находящегося напротив второго упорного элемента (24), образуя первую гибкую пластинку (15'),
и вторая сквозная полость (13'') выполнена по всей высоте набора в первом плоском электроде (11') в месте крепления первого упорного элемента (25) и с совмещением в первом направлении (А) с указанным первым упорным элементом (25), образуя вторую гибкую пластинку (15''),
при этом первое расстояние свободного хода (DB) определено как минимальное расстояние между первым упорным элементом (25) и находящейся напротив поверхностью.
9. Устройство МЭМС или НЭМС по одному из пп. 1-8, в котором оба плоских электрода являются также подвижными относительно друг друга во втором направлении (В), по существу перпендикулярном к первому направлению (А),
при этом второе направление (В) параллельно плоскому слою (1), содержащему электроды,
при этом на первом плоском элементе (21) выполнен первый упорный элемент (25), и на втором плоском элементе (20) выполнен второй упорный элемент (24),
при этом набор выполнен так, чтобы в состоянии отсутствия воздействия любой свободный конец первого плоского электрода (11') находился относительно второго плоского электрода (10') во втором направлении (В) на минимальном расстоянии (Dmin'), превышающем второе расстояние свободного хода (DB'), при этом второе расстояние свободного хода (DB') определено как минимальное расстояние между первым и вторым упорными элементами (24, 25) во втором направлении (В).
10. Устройство МЭМС или НЭМС по любому из пп. 1-9, в котором электрод содержит плоскую пластину и/или в котором электрод содержит электростатическую гребенку.
| US 2010258885 A1, 14.10.2010 | |||
| US 2013019678 A1, 24.01.2013 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ МЭМС КОММУТАТОРА | 2009 |
|
RU2417941C1 |
| СПОСОБ ПОЛУЧЕНИЯ ОКТОДЕЦИЛОВОГО СПИРТА | 0 |
|
SU159172A1 |

