Изобретение относится к радиотехнике, преимущественно к радиолокации и в частности к активной радиолокации.
Общий прогресс радиолокационных систем (РЛС) различных типов и назначения, по пути повышения их информационных возможностей, состоит в увеличении числа пространственных каналов излучения и приема сигналов и повышении информативности зондирующих сигналов за счет увеличения их широкополосности и когерентной длительности. В этой связи важной проблемой современной радиолокации является разработка эффективных способов многоканального излучения, приема и обработки высокоинформативных зондирующих сигналов.
В современной радиолокации эта проблема решается рядом способов, принятых в качестве аналогов.
Известен способ, включающий направленное излучение и прием различных сигналов с внутриимпульсной модуляцией, их обработку, обеспечивающую сложение в фазе спектральных составляющих зондирующего сигнала (сжатие импульса), измерение времени запаздывания, частоты доплера и направления прихода волн [Теоретические основы. радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. Радио, 1970. - 560 с.].
Основной недостаток этой группы аналогов состоит в сложности,, радиотехнической части устройств, необходимых для реализации способа и недостаточной информативности ввиду невозможности эффективной физической обработки многочастотных сигналов.
Другим направлением решения проблемы разработки эффективных способов многоканального излучения, приема и обработки высокоинформативных зондирующих сигналов является способ многопозиционной радиолокации [Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь., 1993. - 416 с.]. Способ основан на излучении и приеме сигналов системой разнесенных в пространстве пунктов, передаче принятых сигналов на пункт обработки и в совместной их физической обработке с помощью радиотехнических устройств. Возникающие при создании таких систем трудности в частности состоят в обеспечении передачи сигналов и в их совместной физической обработке.
Следует отметить, что в части повышения широкополосности и когерентной длительности сигналов важное место занимают многочастотные зондирующие сигналы, используемые в доплеровской радиолокации.
Известен способ радиолокации с использованием зондирующих сигналов с различными несущими частотами [RU, патент №2360265, МПК G01S 13/56, 2009 г.]. Способ заключается в том, что формируют зондирующие радиоимпульсы с различными несущими частотами, после излучения и приема радиоимпульсов осуществляют преобразование частоты путем перемножения зондирующих и принятых радиоимпульсов с одновременным мультиплексированием для выделения сигналов доплеровской частоты соответствующих несущих частот, затем определяют частоту и разницу фаз сигналов доплеровской частоты, получая информацию о радиальной скорости и дальности до цели.
Недостатком этого способа, как и других аналогов, является низкая информативность и сложность устройства необходимого для реализации способа, поскольку обработка сигналов осуществляется физически.
В части упрощения радиотехнических устройств, необходимых для реализации способа, важное место занимает радиоголография. При радиоголографическом способе радиолокации [Сафронов Г.С., Сафронова А.П. Введение в радиоголографию. - М.: Сов. радио, 1973. - 288 с., Голография. Методы и аппаратура. Под ред. В.М. Гинзбург и Б.М. Степанова. - М.: Сов. радио, 1974. - 376 с.]., во-первых, используются простые слабонаправленные антенны, во-вторых, радиоголографический процесс осуществляется в два этапа. Это позволяет на этапе обработки сигналов оперировать с частными голограммами (числами), зарегистрированными в отдельных точках приема сигналов. При многоканальном излучении и приеме сигналов высокая направленность передающей и приемной антенн достигается в результате обработки радиоголограммы, которая может быть осуществлена вычислительными методами.
Наиболее близким по технической сущности к предлагаемому способу является способ подповерхностного зондирования с синтезированием радиоголограмм и восстановлением по ним изображений [RU, патент, №2345381, МПК G01S 13/02, 2009 г.], основанный на излучении зондирующих сигналов из 


Основной недостаток прототипа состоит в его низкой информативности, ввиду того, что результирующая радиоголограмма является одночастотной. Для характерного в радиолокации случая, когда число приемных и передающих пунктов невелико, одночастотные радиоглолограммы обладают низкой информативностью и на практике не используются.
Техническим результатом данного изобретения является расширение области применения за счет повышение информативности способа.
Указанный результат достигается тем, что в известном способе активной радиолокации, основанном на излучении зондирующих сигналов из 






Благодаря полному извлечению информации, содержащейся в тестирующих сигналах, открывается возможность достижение разрешающей способности РЛС соизмеримой с длиной волны излучаемых сигналов, при этом реальные цели (летательные аппараты, наземные объекты и т.п.) представляющие совокупность «блестящих» точек наблюдаются таковыми. То есть открываются перспективы реализации режима радиовидения целей и эффективного решения задач распознавания и идентификации целей. Более того, поскольку, радиотехническая часть РЛС становится простейшей (обеспечивающей лишь излучение и прием сигналов) открываются перспективы быстрого освоения новых диапазонов, в частности миллиметрового, что является основой дальнейшего повышения информационных возможностей РЛС.
Радикальным образом решается проблема создания многопозиционных РЛС (МП РЛС), поскольку, отпадает необходимость передачи на пункт совместной обработки (физической) сигналов. Вместо широкополосных сигналов для совместной обработки передаются результаты измерений (числа), которые действительно содержат необходимую информацию об объектах зондирования и не требуют для передачи сложных устройств. В результате открывается возможность создания сетецентрических РЛС (предназначенных для ведения сетецентрических войн), содержащих большое число простейших (а, следовательно, дешевых) автоматических передатчиков, огневое поражение части которых не только не существенно снижает информационных возможностей таких РЛС, но и становятся экономически не выгодным делом.
Кроме того, снижаются требования к внутренним коммуникациям РЛС с пространственно-распределенными элементами, в том числе в РЛС с антенными решетками, а также открываются перспективы создания многофункциональных РЛС с прямым доступом потребителей к первичной радиолокационной информации (к частным радиоголограммам), что существенно повысит оперативность и эффективность использования радиолокационной информации. За счет возложения всех функций по обработке радиолокационной информации на ЭВМ открываются перспективы создания РЛС, реализующих сложные и эффективные алгоритмы обработки радиолокационной информации с использованием искусственного интеллекта, обеспечивающих адаптацию и автоматизацию процессов функционирования РЛС и принятия эффективных решений на основе полученной радиолокационной информации.
Можно отметить и другие достоинства. В частности, на базе заявляемого способа радиолокации совершенно в ином свете представляется разрабатываемая концепция объединения в единую сеть существующих РЛС. Наряду с объединением вторичной радиолокационной информации, получаемой объединяемыми в единую систему РЛС, появляется возможность объединения результатов зондирования, что позволит существенно повысить информативность единой системы.
Решается также проблема радиолокации малозаметных наземных и воздушно-космических целей, а также целей, созданных с использованием техники «Стеле» (за счет создания простых (в конструктивном исполнении) разнесенных РЛС, одновременно работающих в различных диапазонах длин волн
Совершенно очевидным образом (за счет накопления и последующей совместной обработки результатов измерений) решаются задачи прямого, обратного и совместного, (включая движение объекта локации) синтезирования апертуры передающих и приемных антенн, обеспечивающих дальнейшее повышение информативности вычислительных РЛС.
Высокие информационные возможности заявляемого способа в РЛС открывают также реальные перспективы создания весьма эффективных средств радиолокации заглубленных объектов, разведки недр Земли, измерения радиолокационных характеристик (РЛХ) объектов, радиолокационного контроля материалов и изделий из них, строительных конструкций и т.д.
Упрощение радиотехнической части устройств, реализующих заявляемый способ, заключается в следующем:
- отпадает необходимость в использовании сложных радиотехнических устройств физического формирования, излучения, приема и обработки сложных сигналов, поскольку их функции реализуются на этапе совместной обработки результатов измерений;
- снижаются требования к технике излучения и приема тестирующих сигналов, т.к. не требуется совместная настройка системы излучения тестирующих зондирующих сигналов (подобная той, которая необходима, например, при создании фазированных антенных решеток). Поскольку все возможные отклонения параметров сигналов от проектируемых значений могут быть учтены на этапе обработки сигналов;
- появляется возможность создания радиолокационной техники различных типов и назначения на базе унифицированных блочно-модульных изделий, обеспечивающих реализацию способа;
- обеспечивается органическая связь радиолокационной технологии с общим прогрессом в области технических средств и методов получения, передачи, хранения и цифровой обработки информации;
- снижение энергопотребления изделий, а, следовательно, их массы, габаритов и стоимости, повышение надежности.
В целом создание РЛС на основе заявляемого способа представляется революционным направлением совершенствования РЛС различных типов и назначения (в отличие от традиционного эволюционного направления совершенствования РЛС).
Существо заявляемого способа состоит в следующем.
В заявленном способе, во-первых, излучают многочастотный зондирующий сигнал, во-вторых, сигналов, обеспечивающих получение независимых частных радиоголограмм
Полученная таким образом результирующая радиоголограмма, как и обычная голограмма, содержит полную информацию об объекте зондирования. Однако в отличие от обычной голограммы результирующая радиоголограмма
При восстановлении
Проверку осуществляют путем сопоставления зарегистрированной радиоголограммы
Принципиальная возможность отыскания по
Таким образом, действие заявляемого способа ограничено условиями применимости уравнений Максвелла. Однако для создания информационных радиолокационных систем это ограничение не является существенным, поскольку используемые в них уровни мощности излучаемых сигналов не приводят к нелинейным эффектам взаимодействия электромагнитных волн с объектами зондирования.
Таким образом, введение дополнительных по сравнению с прототипом операций излучения многоканальных зондирующих сигналов, обеспечивающих независимую регистрацию частных радиоголограмм на всех частотах, с учетом доплеровских, формирования результирующей радиоголограммы путем объединения частных радиоголограмм и восстановление результирующей радиоголограммы вычислительными методами, сопоставляя ее с опорными радиоголограммами, рассчитанными с помощью модели процесса зондирования, обеспечивает достижение заявляемого технического результата, что составляет существо изобретения.
Заявляемый способ, судя по доступным сведениям, является новым, поскольку впервые обеспечивает получение многочастотной радиоголограммы, по информативности многократно превышающую одночастотную.
Заявленный способ, имеет изобретательский уровень, поскольку из опубликованных данных известных технических решений явным образом не следует, что совокупность отличительных признаков приводит к расширению области применения способа. С одной стороны, достигаемый существенный технический эффект открывает новые направления исследований, многочастотная радиоголография и вычислительная радиолокация, обеспечивающая упрощение радиотехнической части РЛС различных типов и назначения, реализующих заявляемый способ, что имеет важное практическое значение. С другой стороны, технический эффект явным образом не следует из общих принципов радиоголографии и может быть достигнут только при проведении предложенной в изобретении последовательности действий.
Предварительный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, идентичным всем признакам заявляемого технического решения, отсутствуют, что указывает на соответствие заявляемого изобретения условию патентоспособности «новизна».
Заявляемое техническое решение промышленно применимо, так как может использоваться в РЛС различных типов и назначения, одновременно обеспечивая при этом упрощение радиотехнической части РЛС, реализующих заявляемый способ, и повышение их информативности. Кроме того для реализации способа могут быть использованы стандартное оборудование и приборы.
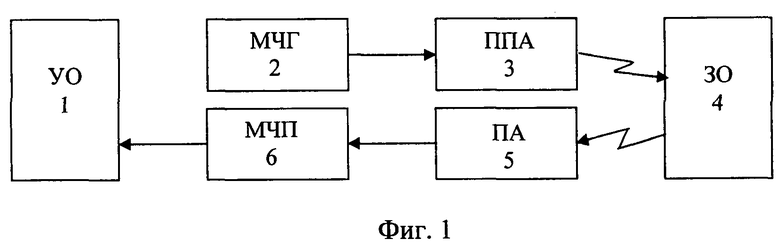
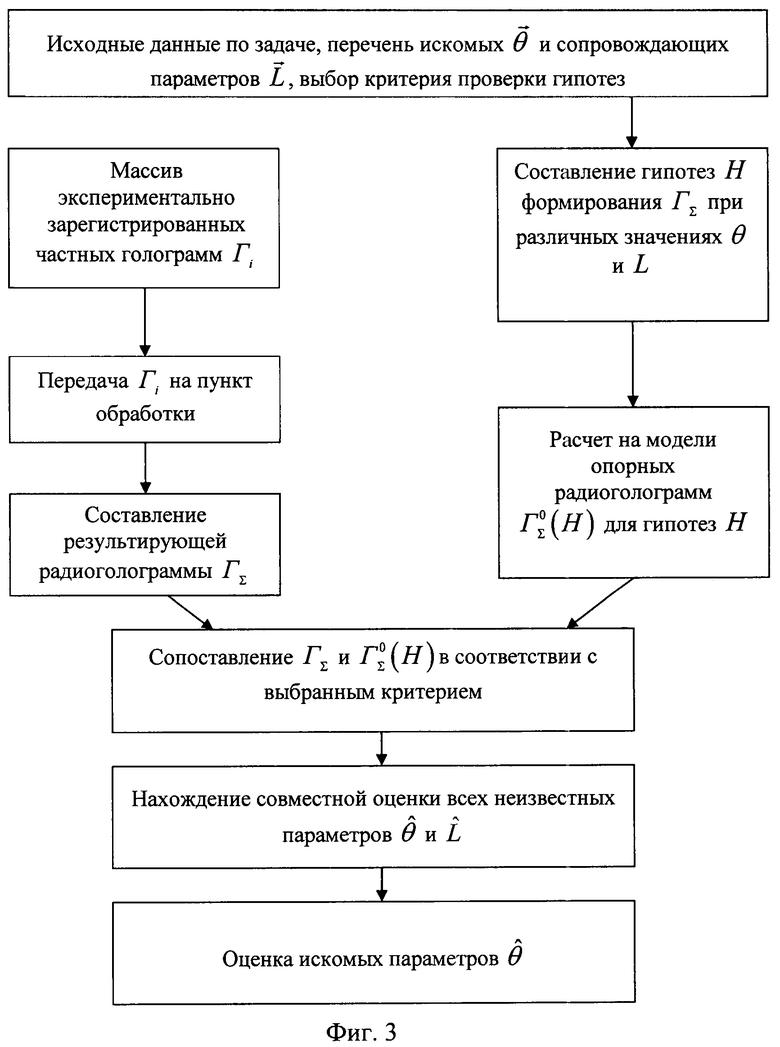
На фиг.1 приведена структурная схема одноканального и на фиг.2 многоканального устройств, реализующих заявленный способ активной радиолокации. На фиг.3 приведена схема общего алгоритма обработки частных многочастотных радиоголограмм.
Одноканальное устройство, реализующее заявляемый способ активной радиолокации, структурная схема которого представлена на фиг.1, содержит: устройство обработки частных радиоголограмм (УО) 1; последовательно соединенные многочастотный генератор зондирующих сигналов (МЧГ) 2 и передающую антенну (ППА) 3, которая направлена в сторону зондируемого объекта (ЗО) 4, приемную антенну (ПА) 5, подключенную ко входу многочастотного приемника зондирующих сигналов (МЧГ) 6 и направленную в сторону зондируемого объекта (ЗО) 4. Выход (МЧГ) 6 соединен с (УО) 1.
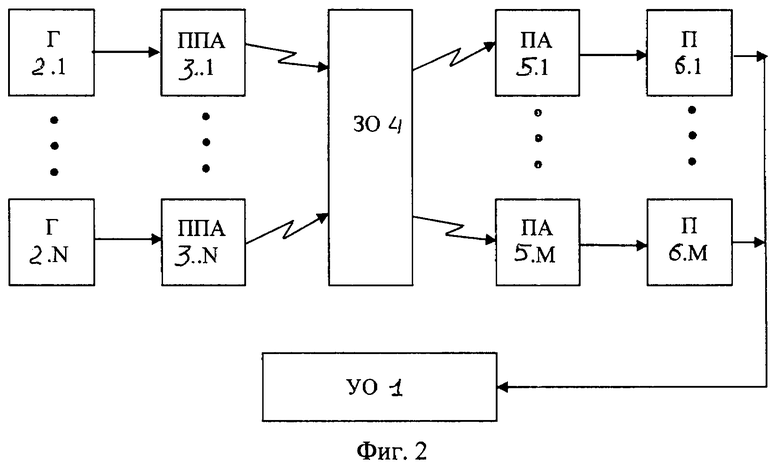
На фиг.2 представлена схема многоканального устройства, содержащего: устройство обработки частных радиоголограмм (УО) 1, генераторы зондирующих сигналов на k частотах (k=1, …, K) N передающих каналов (Г2.1, …, 2.N), выходы которых соединены с передающими антеннами (ППА3.1, …, 3.N), направленными на зондирующий объект (ЗО) 4, приемные антенны (ПА5.1, …, 5.М), направленные на ЗО 4, выходы которых подключены ко входам приемников (П6.1, …, 6.М), соединенных с УО 1.
Одноканальное устройство, реализующее заявляемый способ активной радиолокации, структурная схема которого представлена на фиг.1, работает следующим образом.
Многочастотный генератор зондирующих сигналов (МЧГ) 2 одновременно или последовательно во времени формирует сигналы, которые излучает ППА 3. Отраженные от ЗО 4 сигналы принимает ПА 5, подает их на МЧП 6, который регистрирует частные радиоголограммы. Частные радиоголограммы. МЧП 6 передает на УО 1 для совместной обработки.
Многоканальное устройство, реализующее заявляемый способ активной радиолокации, структурная схема которого представлена на фиг.2, работает следующим образом.
Генераторы (Г2.1, …, 2.N) одновременно или последовательно во времени формируют сигналы на различных частотах, которые излучают ППА3.1, …, 3.N. Отраженные от ЗО 4 сигналы принимают ПА 5.1, …, 5.М, подают их на приемники П6.1, …, 6.М, которые регистрирует частные радиоголограммы. Частные радиоголограммы с приемников П6.1, …, 6.М передаются на УО 1 для их совместной обработки. Обработка частных радиоголограмм осуществляется вычислительными методами, поэтому УО 1 представляет собой универсальную ЭВМ. Общий алгоритм обработки частных голограмм приведен на фиг.3.
Поскольку способ характеризуется использованием технических средств, известных ранее [Голография. Методы и аппаратура. Под ред. В.М. Гинзбург и Б.М. Степанова. - М.: Сов. Радио, 1974. - 376 с.], то техническая осуществимость устройств, реализующих заявленный способ не вызывает сомнений.
Важная особенность функционирования устройств, схемы которых показаны на фиг.1, 2 по сравнению с классическими одночастотными [Сафронов Г.С., Сафронова А.П. Введение в радиоголографию. - М.: Сов. Радио, 1973. - 288 с., Голография. Методы и аппаратура. Под ред. В.М. Гинзбург и Б.М. Степанова. - М.: Сов. Радио. 1974. - 376 с.] состоит в том, что частные радиоголограммы на различных частотах регистрируются отдельно независимо друг от друга. При выборе частот в соответствии с заявляемым способом, частные радиоголограммы будут независимыми и «математически». Поэтому составленная из них результирующая радиоголограмма представляет собой вектор с независимыми компонентами.
Алгоритм обработки частных многочастотных радиоголограмм, полученных в одноканальном устройстве, при решении радиолокационной задачи измерения дальности цели, включает следующие операции:
1. Составление результирующей радиоголограммы
2. Составление гипотез Hi, относительно значений дальности путем разбиения априорного интервала дальностей (R1,R2) на N элементов
где ΔR - величина разрешающего элемента по дальности, определяемая информативностью результирующего зондирующего сигнала, и принятия допущения о том, что цель (цели) находится в i-ом (i=1, …, N) элементе разрешения;
3. Вычисление для каждого i-го элемента дальностей компонентов опорной результирующей радиоголограммы (в соответствии с принятой моделью распространения радиоволн)

где Ri - дальность до i-го элемента разрешения, V - скорость распространения волн, φok - начальная фаза излучаемого сигнала на частоте fk, σ - коэффициент;
4. Вычисление скалярного произведения результирующей зарегистрированной радиоголограммы и вычисленной - опорной (для проверки принятых гипотез), т.е. для каждого i-го разрешаемого элемента по формуле [Г.Корн, Т.Корн. Справочник по математике. - М.: Наука. 1968. - 720 с, стр.399]
где γ(k) - весовая функция;
5. Регистрация максимумов Pi (i=1, …, N), соответствующих целям, находящихся на дальностях Ri.
В целом описанный алгоритм соответствует алгоритму восстановления голограмм, т.е. облучению Гk элементов Г∑ излучением с частотой fk, на которой он получен. Однако реально это можно осуществить только вычислительными методами.
В случае, если скорость распространения волн V точно не известна, а ее априорные значения находятся в интервале (V1,V2), тогда алгоритм обработки, при решении радиолокационной задачи измерения дальности цели, включает следующие операции:
1. Составление гипотез Hij относительно возможных значения дальности Ri и скорости Vj распространения волн путем разбиения интервалов (R1,R2) и (V1,V2) на N М элементов

где интервалы дискретизации по дальности ΔRV и скорости соответствующими размерами разрешающего элемента при совместной оценке R и V;
2. Вычисление компонентов опорной результирующей радиоголограммы для различных значений скорости Vj (J=1, …, М)

3. Вычисление скалярного произведения для различных гипотез Hij
4. Нахождение максимумов значений Pij, по которым судят о дальности целей и скорости распространения волн, определяя при этом искомое значение дальности цели.
Далее рассмотрим алгоритм обработки частных радиоголограмм в многоканальном многочастотном устройстве, функционирующем в режиме обзора.
Алгоритм обработки частных многочастотных радиоголограмм, полученных в многоканальном устройстве, содержащем N передающих каналов, антенны которых расположены в точках 

1. Составление из частных радиоголограмм Гikj, полученных на частотах fk при излучении сигнала с частотой fk из 

2. Составление проверяемых гипотез путем разбиения зондируемого пространства на разрешаемые элементы;
3. Вычисление для каждого l-го элемента компонентов опорной результирующей радиоголограммы

где Rril, Rρlj - расстояния от i-го передающего пункта и от j-го приемного пункта до l-го разрешаемого элемента;
4. Вычисление скалярного произведения результирующе радиоголограммы 

по величине которого судят о наличии цели в l-м элементе разрешения.
Алгоритм является общим независимо от того находятся ли цели в ближней или в дальней зоне приемной и передающей антенн. Физический смысл алгоритма состоит в том, что апостериори, в процессе обработки частных радиоголограмм, передающая и приемная антенны фокусируются в зондируемую точку пространства (в представлении сигналов различных частот «замороженными» волнами).
Для практической реализации заявляемого способа важное значение имеют следующие обстоятельства.
Во-первых, по условиям регистрации частных радиоголограмм предполагается, что всеми зондирующими сигналами облучается один и тот же объект. Именно поэтому совместная обработка частных радиоголограмм приводит к увеличению получаемой информации об объекте зондирования. Так, если объектом зондирования является воздушно-космическое пространство, то частные радиоголограммы могут быть получены для отдельных его областей, выделяемых по времени или (и) по пространству. Например, при использовании многочастотных импульсно-когерентных сигналов частные радиоголограммы (исходя из времени запаздывания сигналов) регистрируются таким образом, чтобы все они соответствовали одному и тому же разрешаемому элементу.
Во-вторых, в число гипотез, проверяемых при восстановлении результирующей радиоголограммы, могут быть включены гипотезы, которые фиксируют не все искомые и сопровождающие параметры. Тем не менее вычисленные для таких гипотез опорные результирующие радиоголограммы будут в различной степени соответствовать результирующей радиоголограмме. Это обстоятельство может быть использовано для предварительного отбора гипотез с целью их последующего уточнения и анализа при решении задач поиска, обнаружения и распознавания сигналов [Сосулин Ю.Г., Фишман М.Н. Теория последовательных решений и ее применения. - М.: Радио и Связь, 1985. - 272 с.].
Возможность реализации последовательной процедуры проверки гипотез покажем на примере восстановления результирующей радиоголограммы с предварительной настройкой передающей и приемной антенн для зондирования и приема сигналов с заданного направления или (в зависимости от относительных размеров передающей и приемной антенн) из заданной пространственной области их фокусирования.
Поскольку положения передающих и приемных элементов, а также частоты излучаемых и принимаемых ими сигналов считаются известными, а область их фокусирования задается, то можно рассчитать весовые коэффициенты опорной результирующей радиоголограммы, соответствующие зондированию выбранной области пространства. Сопоставление зарегистрированной и опорной радиоголограмм осуществляют с помощью вычисления скалярного произведения, т.е. частные радиоголограммы, записанные в координатах местоположения передающих элементов, умножают на коэффициенты, фокусирующие передающую антенну, а частные радиоголограммы, записанные в координатах местоположения приемных антенн, умножают на коэффициенты, фокусирующие приемную антенну. Поскольку причины возникновения фазовых соотношений при этом не известны, то полученные массивы сопоставления зарегистрированной и опорной радиоголограмм некогерентно суммируются, а о наличии сигналов, приходящих из зондируемой области, судят по величине полученной суммы. Описанная процедура соответствует изложенной в книге на стр.41, …, 43 [Иванкин Е.Ф., Понькин В.А. Теоретические основы получения и защиты информации об объектах наблюдения. - М.: Горячая линия - Телеком, 2008. - 448 с.]. Отличие состоит лишь в том, что при вычислении весовых коэффициентов, обеспечивающих фокусирование приемной и передающей антенн, учитываются различные частоты излучаемых и принимаемых сигналов.
Таким образом, заявляемый способ технически реализуем на базе существующих радиотехнических устройств, обеспечивает достижение существенного эффекта и может быть использован для создания высокоинформативных и простых по устройству радиолокационных систем различных типов и назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ С СИНТЕЗИРОВАНИЕМ РАДИОГОЛОГРАММ И ВОССТАНОВЛЕНИЕМ ПО НИМ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2345381C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПРОСТРАНСТВА | 2014 |
|
RU2568430C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ | 2015 |
|
RU2577845C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| Способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования | 2019 |
|
RU2710837C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347237C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2008 |
|
RU2382380C1 |
| Способ радиолокационного моноимпульсного измерения дальности и радиальной скорости целей при зондировании сигналом с линейной частотной модуляцией | 2022 |
|
RU2796220C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
Изобретение относится к радиолокации и, в частности, к активной радиолокации. Достигаемый технический результат изобретения - расширение области применения за счет повышения информативности способа. Способ заключается в излучении многочастотных зондирующих сигналов из ri(i=1, …, N) точек передающей антенны, приеме отраженных сигналов, в независимой регистрации частных радиоголограмм
1. Способ активной радиолокации, включающий излучение зондирующих сигналов из ri(i=1,…, N) точек передающей антенны, прием отраженных сигналов, регистрацию частных радиоголограмм
2. Способ по п.1, отличающийся тем, что частные радиоголограммы регистрируют на совпадающей и ортогональной поляризациях.
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ С СИНТЕЗИРОВАНИЕМ РАДИОГОЛОГРАММ И ВОССТАНОВЛЕНИЕМ ПО НИМ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2345381C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2286585C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ В РЕЖИМЕ АКТИВНОЙ ЛОКАЦИИ ГИДРОАКУСТИЧЕСКОГО ИЛИ РАДИОЛОКАЦИОННОГО КОМПЛЕКСА | 2003 |
|
RU2260197C2 |
| СПОСОБ ДВУХЭТАПНОГО ВОССТАНОВЛЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2009 |
|
RU2411536C1 |
| US 4626853 А, 02.12.1986 | |||
| US 4630051 А, 16.12.1986 | |||
| US 5945941 А, 31.08.1999. | |||

