Изобретение относится к радиолокационной технике и может быть использовано в радиолокационных и радионавигационных системах, а также в системах мобильной связи для определения местоположения объектов.
Известны способы определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающие измерение дальностей до цели тремя позициями, расположенными на известном удалении друг от друга, и определение по измеренным дальностям и расстояниям между позициями прямоугольных координат цели в пространстве (1. см., например, А.Ф.Котов. Методы определения местоположения объектов с повышенной точностью: Учебное пособие / МИРЭА. - М., 1986, с.34,35), а также (2. Кондратьев B.C. и др. Многопозиционные радиотехнические системы / B.C.Кондратьев, А.Ф.Котов, Л.Н.Марков; Под ред. проф. В.В.Цветнова. - М.: Радио и связь, 1986, с.226,227).
Наиболее близким к изобретению по совокупности существенных признаков (прототипом) является способ определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающий на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели и последующее определение искомых координат (3. см.: Справочник по радиолокации. Под ред. М.Сколника. Т.4. Радиолокационные станции и системы. - М.: Сов. радио, 1978, с.193-197; рис.1,б; таблица 1, формулы (16), (17), (18)).
Недостатками известных способов являются неполное использование в системе всех отраженных от цели сигналов и снижение вследствие этого потенциально достижимой точности определения координат, необходимость большого взаимного удаления позиций для достижения требуемой точности, а также невозможность самостоятельного определения координат цели, скоростей их изменения и скорости цели на каждой позиции системы.
Техническим результатом заявляемого изобретения является повышение точности определения координат цели в трехпозиционной дальномерной радиолокационной системе при любом взаимном удалении позиций и обеспечение возможности определения координат цели, скоростей их изменения и скорости цели на каждой позиции системы.
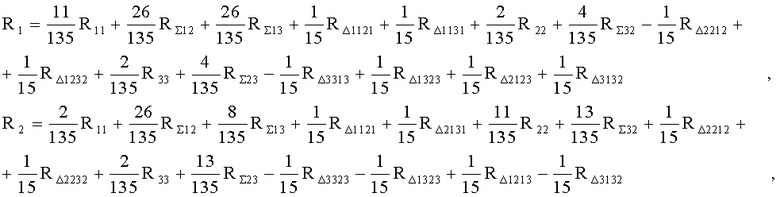
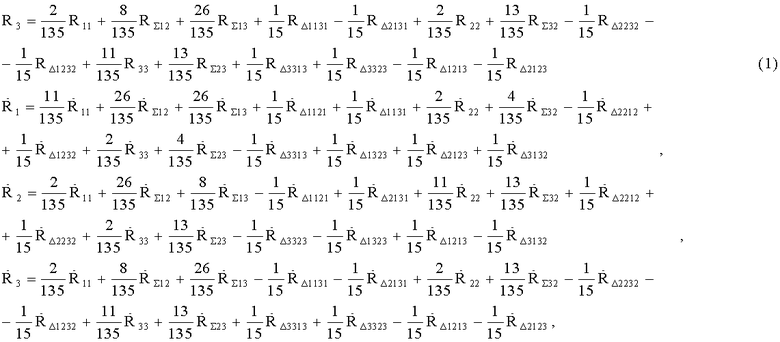
Сущность изобретения выражается в совокупности существенных признаков, достаточной для достижения обеспечиваемого изобретением технического результата, и состоит в том, что в предлагаемом способе определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающем на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, отличающемся тем, что на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по формулам:
где R1, R2, R3 - вычисленные значения дальности от первой, второй и третьей позиций до цели соответственно;
R11, R22, R33 - измеренные значения дальности на первой, второй и третьей позициях соответственно;
RΣ12, RΣ13, RΣ21, RΣ23, RΣ31, RΣ32 - измеренные значения сумм расстояний на первой, второй и третьей позициях соответственно;
RΔ1121, RΔ1131, RΔ2131, RΔ2212, RΔ2232, RΔ1232, RΔ3313, RΔ3323, RΔ1323 - измеренные значения разности расстояний на первой, второй и третьей позициях соответственно;
RΔ1213, RΔ2123, RΔ3132 - измеренные значения разности расстояний между второй и третьей, первой и третьей, первой и второй позициями соответственно;
RΔ1213, RΔ2123, RΔ3132 - разности сумм расстояний, измеренные между второй и третьей, первой и третьей, первой и второй позициями соответственно;







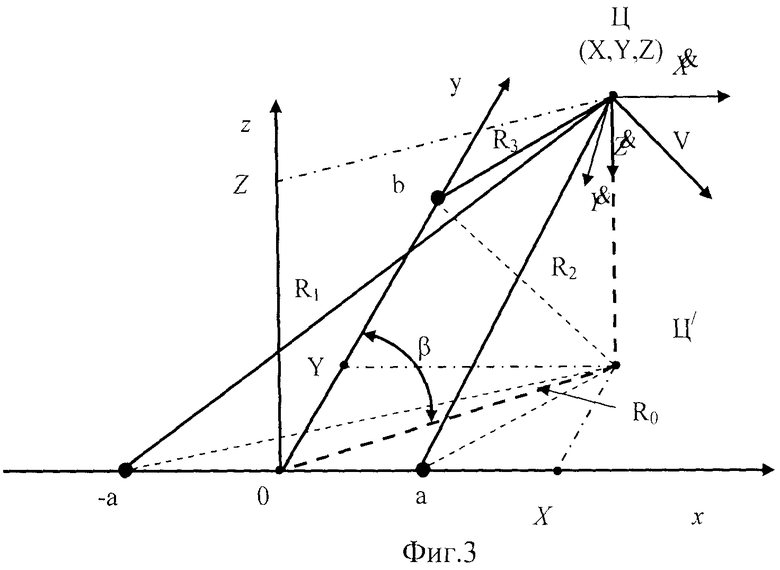
где X, Y, Z - координаты цели, 


Технический результат достигается путем кооперативной обработки координатной информации, обеспечивающей создание в многопозиционной системе избыточности измерений, что позволяет сформировать высокоточные оценки наклонных дальностей и скоростей их изменения относительно каждой из позиций. Это дает возможность сформировать высокоточные оценки прямоугольных координат и значение скорости цели за один цикл обработки информации.
Сущность изобретения раскрывается с помощью фигур 1-6.
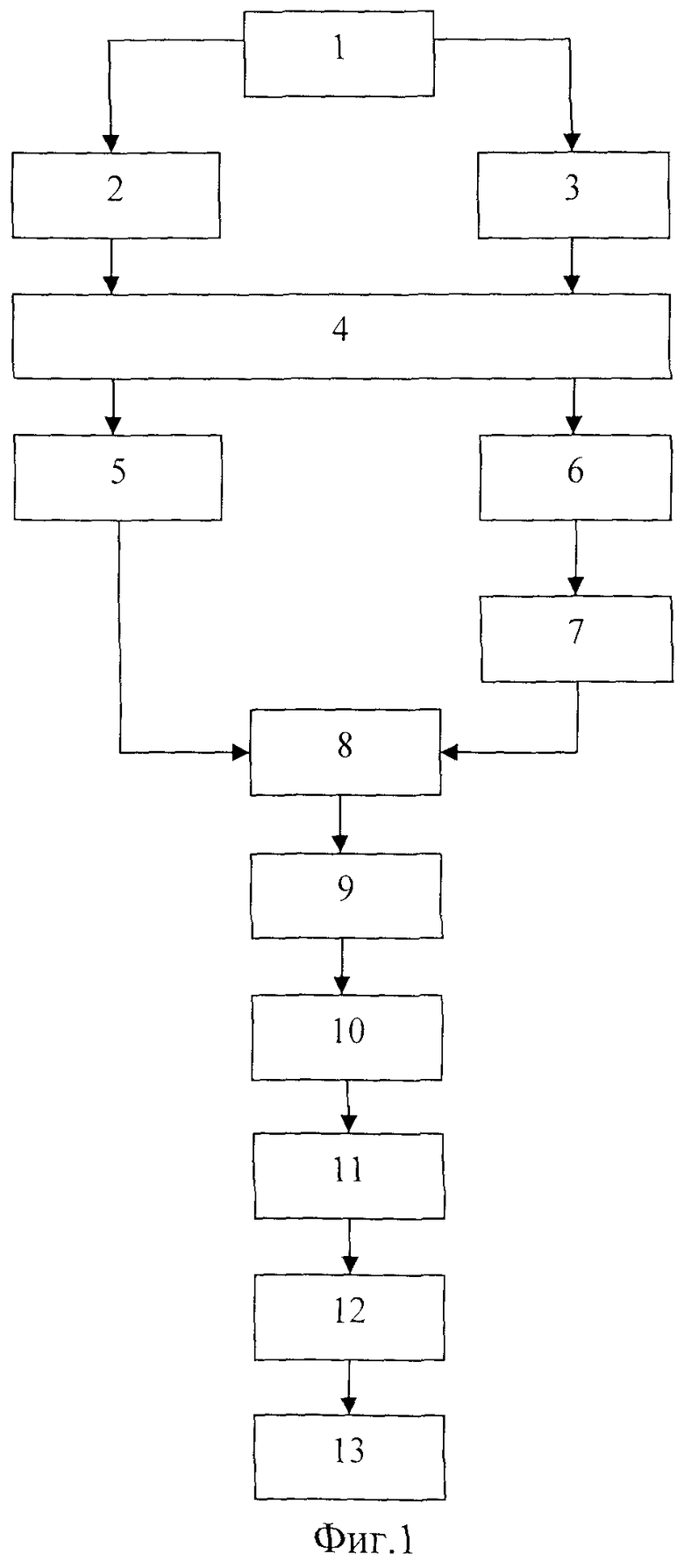
На фиг.1 изображена блок-схема алгоритма для осуществления способа;
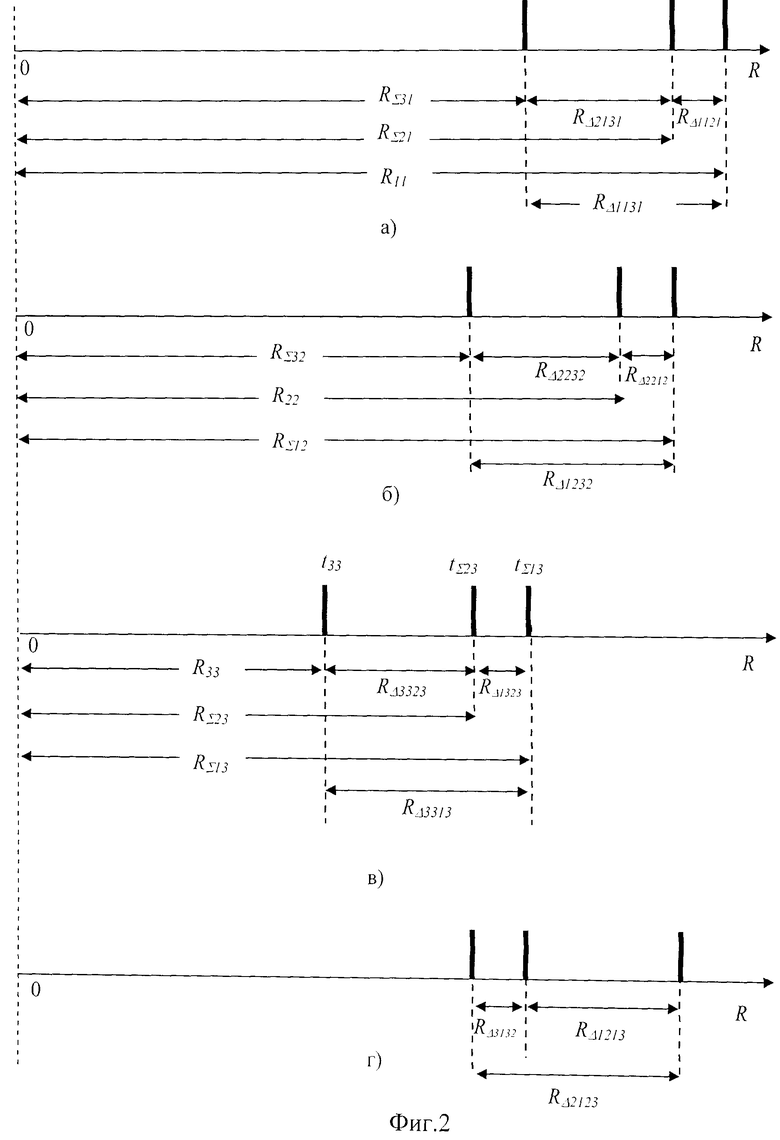
на фиг.2 - дальности, суммы и разности дальностей, измеряемые на позициях системы;
на фиг.3 - схема расположения элементов трехпозиционной дальномерной системы;
на фиг.4 приведена структурная схема устройства для реализации заявляемого способа;
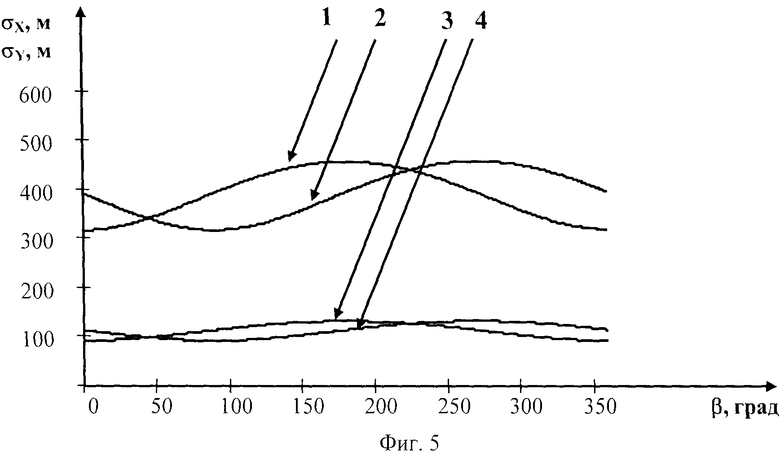
на фиг.5 - значения среднеквадратических ошибок (СКО) определения прямоугольных координат для прототипа и предлагаемого способа;
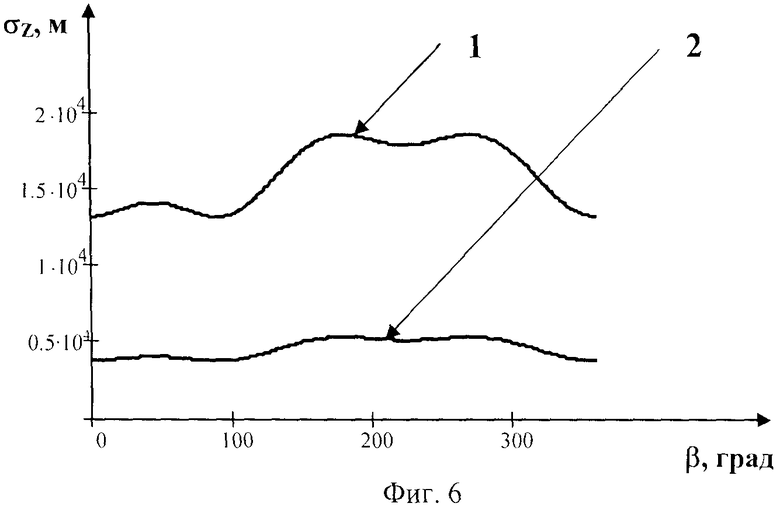
на фиг.6 - значения СКО определения высоты для прототипа и предлагаемого способа.
Способ включает следующие основные операции на каждой позиции системы (фиг.1):
1 - излучение сигналов;
2 - прием отраженных от цели сигналов, излученных этой позицией;
3 - прием отраженных от цели сигналов, излученных двумя другими позициями;
4 - разделение принятых сигналов по принадлежности к излучившей их позиции;
5 - измерение по принятым сигналам дальности от этой позиции до цели;
6 - измерение по принятым сигналам двух сумм дальностей от этой позиции до цели и от цели до двух других позиций и трех попарных разностей дальностей от первой, второй и третьей позиций до цели и разности расстояний между двумя позициями;
7 - измерение по принятым сигналам скоростей расстояний и скоростей изменения двух сумм дальностей от этой позиции до цели и от цели до двух других позиций и трех попарных скоростей изменения разностей дальностей от первой, второй и третьей позиций до цели и скоростей изменения разности расстояний между двумя позициями;
8 - передача измеренных сигналов, соответствующих дальности, сумме и разности дальностей и скоростей изменения на вычислительное устройство;
9 - вычисление уточненных значений дальности от первой, второй и третьей позиций до цели;
10 - вычисление уточненных значений дальностей и скоростей их изменения от первой, второй и третьей позиций до цели;
11 - определение прямоугольных координат цели;
12 - определение скоростей изменения прямоугольных координат цели;
13 - определение скорости цели.
Предлагаемый способ может быть реализован на базе трех идентичных многочастотных РЛС (РЛС1, РЛС2 и РЛС3) в соответствии с фиг.4, где показаны: система 1 синхронизации, многочастотный передатчик 2, фазированная антенная решетка 3 (ФАР), многочастотный многоканальный приемник 4, измеритель 5 наклонной дальности, измеритель 6 сумм расстояний; измеритель 7 разностей расстояний, измеритель 8 скорости изменения наклонной дальности, измеритель 9 скорости изменения сумм расстояний, измеритель 10 скорости изменения разностей расстояний, аппаратура 11 передачи данных, вычислитель 12. При этом первый выход системы 1 синхронизации соединен со входом многочастотного передатчика 2, выход которого соединен со входом фазированной антенной решетки 3, выход которой соединен со вторым входом многочастотного многоканального приемника 4, первый вход которого соединен со вторым выходом системы 1 синхронизации, первый, второй, третий четвертый, пятый и шестой выходы многочастотного многоканального приемника 4 соединены со входами измерителя 5 наклонной дальности, измерителя 6 сумм расстояний, измерителя 7 разностей расстояний, измерителя 8 скорости изменения наклонной дальности, измерителя 9 скорости изменения сумм расстояний, измерителя 10 скорости изменения разностей расстояний, выходы которых соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами аппаратуры 11 передачи данных, выход которой является выходом первой РЛС и соединен с первым входом вычислителя 12, второй и третий входы которого являются входами для подключения выходов второй и третьей РЛС, выход вычислителя 12 является выходом системы.
Способ осуществляется следующим образом.
Каждая из трех позиций системы излучает сигналы, принимает отраженные целью сигналы, излученные как этой позицией, так и двумя другими позициями, разделяет принятые сигналы по принадлежности к излучившим их позициям (операции 1, 2, 3, 4 алгоритма) и производит по ним независимые измерения дальностей (операция 5) и независимые измерения сумм и разностей дальностей (операция 6), а также независимые скорости изменения дальностей, сумм расстояний, разности расстояний (операция 7). Измерения сумм и разностей дальностей и скоростей их изменения независимы, так как они получены не на основе раздельных измерений дальностей R1, R2, R3, 


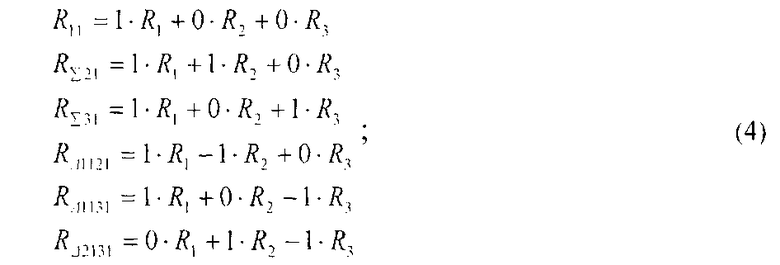
Измеряемые величины показаны на фиг.2, 3 и равны:
на первой позиции
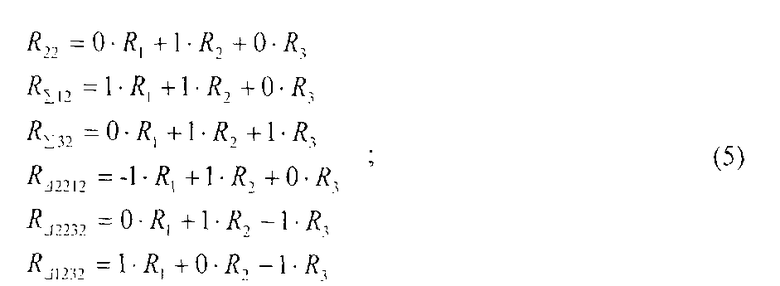
на второй позиции
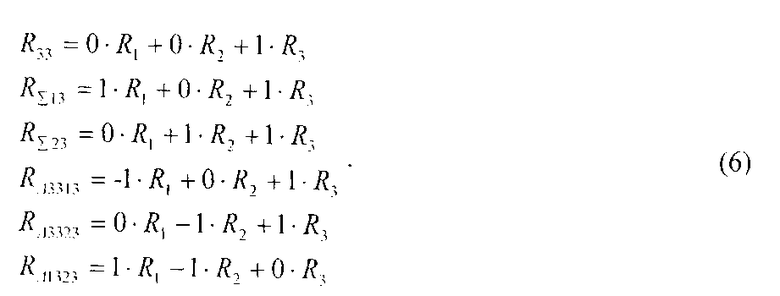
на третьей позиции
Кроме того, на первой, второй и третьей позициях измеряются разности расстояний, соответствующие

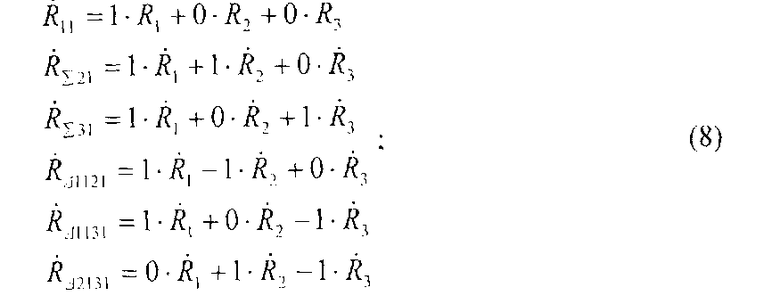
Дополнительно измеряются скорости изменения величин:
на первой позиции
на второй позиции
на третьей позиции
Кроме того, на первой, второй и третьей позициях измеряются скорости изменения разностей расстояний, соответствующие

Сигналы, соответствующие измеренным величинам, передаются с каждой позиции на две другие позиции (операция 8), после чего на всех позициях системы вычисляются по выражениям (1) уточненные значения дальности от первой, второй и третьей позиций до цели (операция 9) и скорости их изменения (операция 10), которые используются для определения прямоугольных координат цели (операция 11) по формулам (2) скоростей их изменения, и скорости цели (операции 12 и 13) и по формулам (3).
Система синхронизации первой РЛС (РЛС1) 1 формирует требуемые длительности и период повторения зондирующих импульсов.
Многоканальный передатчик 2 генерирует СВЧ сигналы на соответствующей сетке частот и посредством фазированной антенной решетки (ФАР) 3 излучает их в пространство, аналогичные процессы происходят на РЛС2 и РЛС3, реализуя таким образом первую операцию способа - излучение сигналов.
Отраженные от цели сигналы принимаются фазированной антенной решеткой (ФАР) 3 и далее поступают на второй вход многочастотного многоканального приемника 4, который осуществляет прием и обработку сигналов, выделяя таким образом сигналы целей, реализуя операцию 2 способа, кроме того, ФАР 3 принимает сигналы целей, облученные двумя другими позициями системы, а многоканальный приемник 4 осуществляет их прием и обработку, реализуя опреацию 3 способа - прием отраженных от цели сигналов, излученных двумя другими позициями. Система синхронизации 1 по первому входу многочастотного многоканального приемника 4 осуществляет его временные режимы работы, выполняя операцию 4 способа - разделение принятых сигналов по принадлежности к излучившей их позиции, фиг.2а) - на первой РЛС, фиг.2б) - для второй РЛС и фиг 2в) - для третьей РЛС. Первый выход многоканального многочастотного приемника 4 соединен со входом измерителя 5 наклонной дальности, второй выход - со входом измерителя 6 сумм расстояний, а третий выход - со входом измерителя 7 разностей расстояний. Измеритель 5 наклонной дальности реализует процедуру 5 способа - измерение по принятым сигналам дальности от этой позиции до цели. Измеритель 6 сумм расстояний реализует процедуру 6 способа измерение по принятым сигналам двух сумм дальностей от этой позиции до цели и от цели до двух других позиций. Измеритель 7 разности расстояний реализует операцию 6 способа - измерение трех попарных разностей дальностей от первой, второй и третьей позиций до цели и разности расстояний между двумя позициями. Измеритель скорости изменения наклонной дальности 8, измеритель скорости изменения сумм расстояний - 9 и измеритель скорости изменения разностей расстояний - 10 реализуют процедуру 7 способа - измерение по принятым сигналам скоростей расстояний и скоростей изменения двух сумм дальностей от этой позиции до цели и от цели до двух других позиций и трех попарных скоростей изменения разностей дальностей от первой, второй и третьей позиций до цели и скоростей изменения разности расстояний между двумя позициями.
Таким образом, на первой РЛС измеряются величины согласно формулам (4), (8), (7) и (11), на второй по формулам (5), (9) (7) и (11) и на третьей по формулам (6), (10), (7) и (11).
Измеренные значения дальностей скоростей их изменения, сумм расстояний и скоростей их изменения, разностей расстояний и скоростей их изменения посредством аппаратуры передачи данных 11 транслируются на вычислитель, 12 реализуя таким образом операцию 8 способа - передача измеренных сигналов, соответствующих дальности, сумме и разности дальностей и скоростей изменения на вычислительное устройство.
Вычислитель 12 реализует следующие операции способа: 9 - вычисление уточненных значений дальности от первой, второй и третьей позиций до цели; 10 - вычисление уточненных значений дальностей и скоростей их изменения от первой, второй и третьей позиций до цели (формула 1); 11 - определение координат цели; 12 - определение скоростей изменения координат прямоугольных цели; 13 - определение скорости цели (формулы 2 и 3).
Выражения (1), (2) получаются следующим образом.
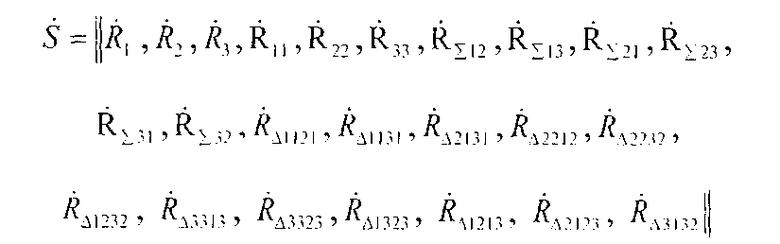
Совокупность измерений (4)-(7), имеющуюся на каждой позиции, можно рассматривать как переопределенную систему из 21 линейного алгебраического уравнения относительно трех неизвестных R1 R2, R3, размерностью 21×3, в которой -1, 0, 1 - постоянные коэффициенты, а R11, R22, R33, RΣ12, RΣ13, RΣ21, RΣ23, RΣ31, RΣ32, RΔ1121, RΔ1131, RΔ2131, RΔ2212, RΔ2232, RΔ1232, RΔ3313, RΔ3323, RΔ1323, RΔ1213, RΔ2123, RΔ3132, RΔ1213, RΔ2123, RΔ3132, R11, R12, …, R36 - дальности, их суммы и разности, известные в результате измерений.
Обозначим:
 - матрица постоянных коэффициентов;
- матрица постоянных коэффициентов;

R11, R22, R33 - значения дальности, измеренные на первой, второй и третьей позициях соответственно;
RΣ13, RΣ21, RΣ23, RΣ31, RΣ32 - значения сумм расстояний измеренные на первой, второй и третьей позициях соответственно;
RΔ1121, RΔ1131, RΔ2131, RΔ2212, RΔ2232, RΔ1232, RΔ3313, RΔ3323, RΔ1323 - значения разности расстояний измеренные на первой, второй и третьей позициях соответственно;
RΔ1213, RΔ2123, RΔ3132 - разности расстояний, измеренные между второй и третьей, первой и третьей, первой и второй позициями соответственно;

- вектор измеренных дальностей, их сумм и разностей;
Т - знак транспонирования матрицы (вектора).
Тогда исходная система линейных алгебраических уравнений преобразуется в линейное векторно-матричное уравнение вида

Умножим обе части этого уравнения с учетом условия сцепленности матриц слева сначала на матрицу АT:
(ATA)R=ATSизм,
а затем на обратную квадратную матрицу (ATA)-1 размером 3×3 (здесь (.)-1 - знак обращения матрицы):
(ATA)-1(ATA)S=(ATA)-1ATSизм.
Так как произведение (ATA)-1(ATA) есть единичная матрица, то

Произведя вычисления согласно (13), получим выражения (1) для уточненных значений дальностей, правильность которых непосредственно проверяется подстановкой входящих в них величин из (4)-(7).
Дифференцированием (13) по времени получим, что:

где:
включает величины (8)-(11).
Нетрудно убедиться, что в силу линейности полученных выражений вычисленные по ним значения дальностей являются несмещенными (математические ожидания ошибок равны нулю) с дисперсиями 

где 
Заметим, что данное решение совпадает с решением уравнения (6) известным методом наименьших квадратов, который согласно теореме Гаусса-Маркова о наилучших линейных оценках дает несмещенную, эффективную (минимальную среди всех возможных) и состоятельную оценку вектора неизвестных дальностей по результатам измерений (4. см. Жданюк Б.Ф. Основы статистической обработки траекторных измерений. - М.: Сов. радио, 1978, с.31-34).
Это означает, что вычисленные таким образом значения дальностей являются потенциально наиболее точными с минимальной дисперсией, которая на основании (8) для случая равноточных измерений составляет относительную величину, тогда дисперсии расчетных значений дальности на соответствующих позициях равны:
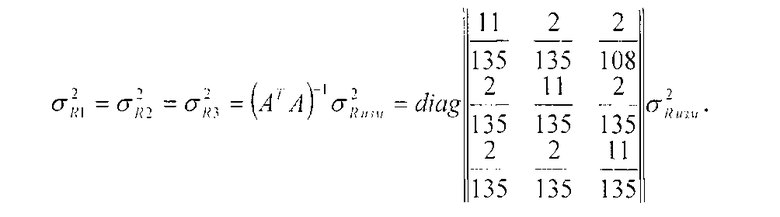
Отсюда следует, что дисперсии вычисления дальностей R1, R2, R3 уменьшаются по сравнению с точностью единичных измерений в 135/11=12.3 раза, а соответствующие среднеквадратические ошибки - в корень квадратный из них, т.е. в 3,5 раза. Во столько же раз примерно уменьшаются согласно теории ошибок измерений среднеквадратические ошибки определения искомых координат X, Y, Z по формулам (2) при любом взаимном удалении позиций (фиг.5, 6), равные соответственно



где: 





Выражения (16), (17), (18) получаются путем применения к (2) теоремы о линеаризации функции нескольких случайных аргументов и нахождения дисперсии суммы случайных величин по известным правилам теории вероятностей (5. см. Вентцель Е.С. Теория вероятностей. - М: Наука, 1969 г., с.255-257).
На фиг.5 приведены среднеквадратические ошибки определения координат X и Y, полученные при условиях R0=450 км, а=b=100 км σR=100 м, и V=200 м/с, где кривые 1 и 2 соответствует значению σX и σY для существующего способа, а кривые 3 и 4 - значению σX и σY для предлагаемого способа определения координат.
На фиг.6 приведены среднеквадратические ошибки определения высоты, где кривая 1 соответствует значению σZ для существующего способа, а кривая 2 - значению σZ для предлагаемого способа определения координат.
Анализ графиков, приведенных на фиг.5, 6, показывает, что среднеквадратическая ошибка определения прямоугольных координат в зависимости от местоположения цели уменьшается почти в 3 раза.
Физической основой выигрыша в точности заявляемого способа по сравнению с прототипом является кратное увеличение количества принимаемых сигналов (с трех до двадцати одного), соответствующих им измерений (с трех до двадцати одного) и возникающая вследствие этого значительная избыточность (переопределенность) измерительной информации по отношению к минимально необходимой, что позволяет произвести ее оптимальную по критерию точности статистическую обработку.
Возможность осуществления изобретения с реализацией указанного назначения подтверждается следующими сведениями.
Так, операции 1, 2, 3 способа выполняются с помощью антенных систем, фазированных антенных решеток, передатчиков и приемников сигналов. Фазированная антенная решетка может быть выполнена как в (6. патент на изобретение РФ №2456723, МПК H01Q 21/00, опубл. 20.07.2012) либо как в (7. Активные фазированные антенные решетки. Гостюхин В.Л., Трусов В.Н., Гостюхин А.В. - М.: Радиотехника, 2011, стр.20, рис.1.3).
Многочастотный передатчик и многочастотный многоканальный приемник могут быть также выполнены на элементах активных ФАР, например как в (8. Активные фазированные антенные решетки. Под ред. Д.И. Воскресенского и А.И. Канащенкова. - М.: Радиотехника, 2004).
Многоканальное радиопередающее устройство можно реализовать также как в (8. Активные фазированные антенные решетки. Под ред. Д.И. Воскресенского и А.И. Канащенкова. - М.: Радиотехника, 2004) на основе многоканального приемо-передающего модуля АФАР (стр.34, рис.2.3).
Кроме того, приемо-передающий модуль может быть выполнен как в (9. Патент изобретение РФ №2362268, МПК H01Q 21/00, опубл. 20.07.2009).
Многочастотный передатчик можно представить также в виде отдельных передающих модулей, излучающих на соотвествующих частотах, например как в (10. Патент на изобретение РФ №2327184, МПК G01S 7/484, опубл. 20.06.2008).
Многочастотный многоканальный приемник можно также представить в виде отдельных модулей, принимающих и обрабатывающих сигналы на соответствующих частотах, например как (11. Справочник по учебному проектированию приемно-усилительных устройств. Белкин М.К., Белинский В.Т., Мазор Ю.Л., Терещук Р.М. - К.: - Выща школа, 2-е издание. 1988 г., стр.405, рис.14.1).
Разделение принятых сигналов разных позиций (операция 4) может осуществляться в приемнике каждой позиции по несущей частоте, времени их излучения и приема, очередности прихода сигналов и другим характерным признакам.
Измерение дальностей, их сумм и разностей (операции 5, 6) производится на основе измерения времени прихода отраженных от цели сигналов первой, второй и третьей позиций с помощью известных аналоговых или цифровых устройств, предназначенных для измерения дальности (дальномеров), например, как описано в известных источниках информации (12. Бакулев П.А. Радиолокационные системы. - М: Радиотехника, 2004, с.240; 13. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. - Минск: Техника, 1978, с.28 и с.116).
Измерение скорости изменения дальностей, их сумм и разностей (операция 7) производится на основе измерения соответствующих им доплеровских частот (12. Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2004, с.277-279; 2. Многопозиционные радиотехнические системы / B.C. Кондратьев, А.Ф. Котов, Л.Н. Марков / Под ред. проф. В.В. Цветнова. - М.: Радио и связь, 1986, стр.246) либо методом дифференцирования измерений соответствующих дальностей, их сумм и разностей, например как в (14. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Часть 1. - М.: Воениздат, 1983, 456 с.387-388).
Передача данных, соответствующих дальности, сумме и разности дальностей и скоростей изменения, на вычислительное устройство (операция 8) выполняется посредством известных линий передачи данных, например, (15. Патент на изобретение РФ №2441330, МПК H04L 5/02, опубл. 27.01.2012). Синхронизация режимов работы РЛС может осуществляться как в (16. Патент на изобретение РФ №2304788, МПК G01S 7/285, H04L 7/00, опубл. 20.08.2007).
Вычисление уточненных значений дальности от первой, второй и третьей позиций до цели, вычисление уточненных значений дальностей и скоростей их изменения от первой, второй и третьей позиций до цели, определение прямоугольных координат цели, определение скоростей изменения координат прямоугольных цели и 13 - определение скорости цели (операции 9-13) является вычислительной процедурой и может быть организовано как в (17. Патент на полезную модель РФ №72339, МПК G06F 15/16, опубл. 10.04.2008).
Таким образом, совокупность существенных признаков способа обеспечивает достижение требуемого технического результата, а именно повышение точности определения координат цели в трехпозиционной дальномерной радиолокационной системе при любом взаимном удалении позиций и обеспечение возможности определения координат цели и скоростей их изменения на каждой позиции системы.
Использование данного способа в радиолокационных и радионавигационных системах, а также в системах мобильной связи позволит повысить их точность, расширить зону действия при заданной точности определения координат, а также обеспечить устойчивость и надежность функционирования этих систем в сложных условиях радиоэлектронной обстановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат и параметров движения целей в дальномерной многопозиционной радиолокационной системе | 2020 |
|
RU2759198C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2012 |
|
RU2515562C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ СКОРОСТИ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2012 |
|
RU2559296C2 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА В БОЛЬШОМ ДИАПАЗОНЕ ИЗМЕНЕНИЯ ВЕЛИЧИН ЭФФЕКТИВНЫХ ПЛОЩАДЕЙ РАССЕИВАНИЯ ЛОКАЛЬНЫХ ЦЕНТРОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2008 |
|
RU2372627C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
Изобретение может быть использовано в радиолокационных и радионавигационных системах, а также в системах мобильной связи для определения местоположения объектов. Достигаемый технический результат - повышение точности определения координат цели в трехпозиционной дальномерной радиолокационной системе. Указанный результат достигается за счет того, что осуществляют на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, при этом на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по соответствующим формулам. 6 ил.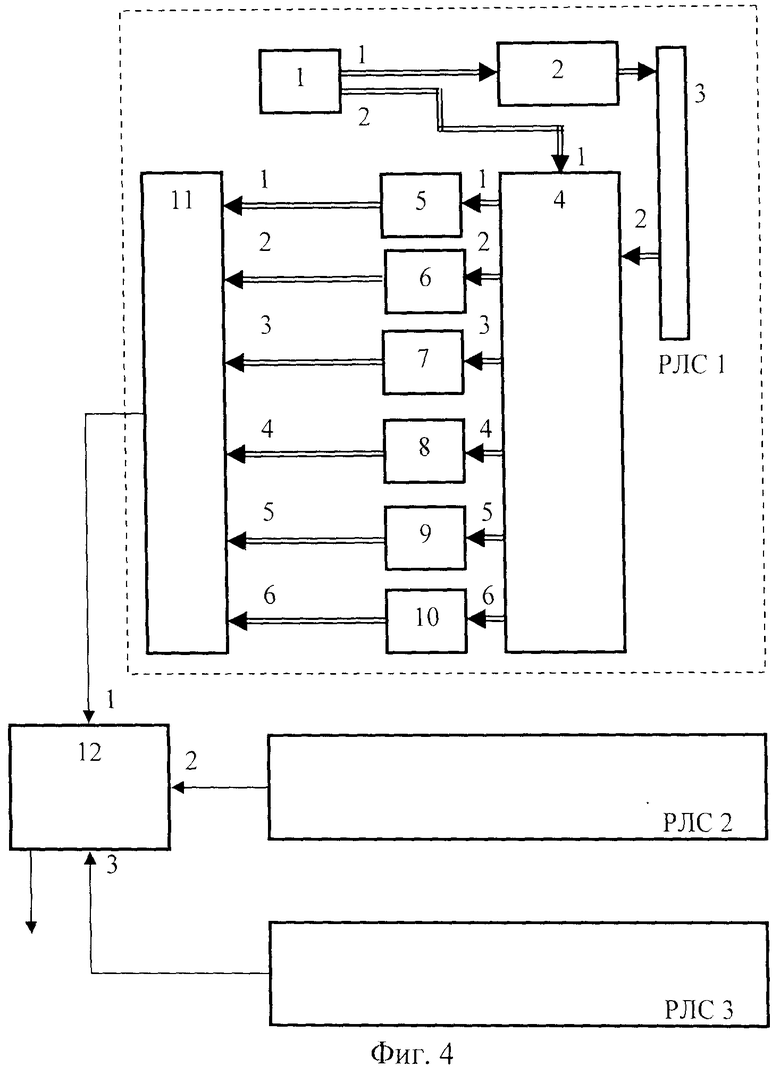
Способ определения координат цели в трехпозиционной дальномерной радиолокационной системе, включающий на каждой позиции излучение зондирующих сигналов, прием отраженных от цели сигналов, излученных этой позицией, измерение по принятым сигналам дальности от этой позиции до цели, определение координат цели, отличающийся тем, что на каждой позиции дополнительно измеряют скорости изменения дальности, принимают отраженные от цели сигналы, излученные двумя другими позициями, разделяют принятые сигналы по принадлежности к излучившей их позиции, измеряют по принятым сигналам две суммы дальностей и скорости их изменения от этой позиции до цели и от цели до двух других позиций и три попарные разности дальностей и скорости их изменения от первой, второй и третьей позиций до цели, передают сигналы, соответствующие измеренным значениям дальности и скоростям их изменения, суммы и разности дальностей и скорости их изменения на две другие позиции, измеряют три разности сумм расстояний и скорости их изменения между позициями системы, вычисляют уточненные значения дальности и скорости их изменения от первой, второй и третьей позиций до цели по формулам:
где R1, R2, R3 - вычисленные значения дальности от первой, второй и третьей позиций до цели соответственно;
R11, R22, R33 - измеренные значения дальности на первой, второй и третьей позициях соответственно;
RΣ12, RΣ13, RΣ21, RΣ23, RΣ31, RΣ32 - измеренные значения сумм расстояний на первой, второй и третьей позициях соответственно;
RΔ1121, RΔ1131, RΔ2131, RΔ2212, RΔ2232, ,RΔ1232, RΔ3313, RΔ3323, RΔ1323 - измеренные значения разности расстояний на первой, второй и третьей позициях соответственно;
RΔ1213, RΔ2123, RΔ3132 - измеренные значения разности расстояний между второй и третьей, первой и третьей, первой и второй позициями соответственно;
RΔ1213, RΔ2123, RΔ3132 - разности сумм расстояний, измеренные между второй и третьей, первой и третьей, первой и второй позициями соответственно;
























а координаты цели и скорости их изменения и скорость цели определяют по формулам:


где Х, Y, Z - координаты цели, 


| Справочник по радиолокации | |||
| Под ред | |||
| М.СКОЛНИКА, Т.4, Москва, Советское радио, 1978, с.193-197, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2006 |
|
RU2309420C1 |
| РАЗНЕСЕННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ ПЕЛЕНГАТОР | 2008 |
|
RU2382378C1 |
| ДАЛЬНОМЕРНО-РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2007 |
|
RU2363010C2 |
| US 6239746 B1, 29.05.2001 | |||
| WO 2010072593 A1, 01.07.2010 | |||
| US 5406291,A, 11.04.1994 | |||
| WO 2004011955 A2, 05.02.2004 | |||

