Настоящее изобретение относится к газотурбинным двигателям.
В частности, настоящее изобретение связано со способом балансировки ротора для газотурбинного двигателя и с устройством для балансировки ротора.
Газотурбинные двигатели, которые являются конкретным примером турбомашин, обычно включают в себя ротор с некоторым количеством рядов вращающихся лопаток ротора, которые прикреплены к валу ротора (см., например, учебное пособие по балансировке роторов «Texas A&M Turbomachinery Laboratory projects», Turbomachinery International, Ray Kelm, опубл. 16.09.2016 /с. 6 абзац 5 - с. 8 абзац 4, с. 15 абзац 3 - с. 17 абзац 3, фиг. 9/). Когда горячая и нагнетаемая рабочая текучая среда течет через ряды лопаток в главном проходе газовой турбины, она передает импульс лопаткам ротора и, таким образом, приводит ротор во вращательное движение. В результате любого дисбаланса ротора возникают вибрации, которые могут отрицательно влиять на эффективность и срок службы газовой турбины. Для удовлетворительной работы, таким образом, требуется точная балансировка ротора для подавления вибраций. Для этой цели, ротор подвергается процедуре балансировки, при которой оценивается дисбаланс, и на ротор устанавливаются балансировочные грузики.
Известная процедура балансировки может содержать этапы, на которых устанавливают ротор в сборе на балансировочную машину, приводят ротор во вращение с заданной балансировочной частотой вращения и измеряют вибрации ротора в ходе так называемого базового прогона. Затем калибровочный грузик временно устанавливают на одну из доступных плоскостей коррекции, включенных в конструкцию ротора. Ротор снова приводят во вращение и измеряют вибрации с калибровочным грузиком, находящимся в соответствующем месте. Этот так называемый прогон с воздействием выполняется для каждой доступной плоскости коррекции отдельно для оценивания ее реакции на вибрацию. На основе сравнения с базовым прогоном, устанавливают корректировочные грузики. Балансировочные грузики устанавливают для уменьшения дисбаланса ротора, и, таким образом, они обычно отличаются от калибровочных грузиков как в отношении массы, так и в отношении углового положения.
Было обнаружено, что роторы некоторых типов, которые могут быть названы «нечувствительными роторами», труднее сбалансировать с использованием известной процедуры. Другими словами, в то время как некоторые общепринятые роторы могут быть сбалансированы посредством выполнения, например, четырех или пяти прогонов в балансировочной машине, нечувствительные роторы могут потребовать значительно большего числа прогонов для удовлетворения требований применимого стандарта балансировки. В некоторых случаях, нечувствительный ротор требует более 10 прогонов для балансировки, что приводит по меньшей мере к одному дополнительному рабочему дню по сравнению с чувствительным ротором.
Следовательно, крайне необходим способ балансировки ротора, уменьшающий число итераций, необходимых для балансировки, по сравнению с общепринятыми способами.
Согласно настоящему изобретению, обеспечен способ балансировки ротора, компьютерно-читаемый носитель данных и балансировочная машина, описанные в прилагаемой формуле изобретения. Другие признаки изобретения будут понятны из зависимых пунктов формулы изобретения и из нижеследующего описания.
Соответственно, может быть обеспечен способ балансировки ротора для газовой турбины. Способ содержит этап, на котором обеспечивают ротор (100), содержащий: первый подшипник (140) и второй подшипник (142), и множество плоскостей (150) коррекции, содержащих первую плоскость (152) коррекции и вторую плоскость (154) коррекции. Первый балансировочный грузик (W1) может быть прикреплен на первую плоскость (152) коррекции и остается прикрепленным для всех следующих прогонов с воздействием. Способ может дополнительно этап, на котором выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), причем вибрации, детектируемые на первом подшипнике (140), имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике (142). Способ может дополнительно содержать этап, на котором обеспечивают набор данных, содержащий эталонный вектор воздействия второй плоскости (154) коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора (100), относящегося к тому же типу изделий, что и ротор (100). Способ может дополнительно содержать этап, на котором устанавливают первый калибровочный грузик (М1) на вторую плоскость (154) коррекции с использованием эталонного вектора воздействия для определения массы и углового положения первого калибровочного грузика (М1). Способ может дополнительно содержать этап, на котором выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), и удаляют первый калибровочный грузик (М1) с ротора (100). Способ может дополнительно содержать этап, на котором вычисляют вектор воздействия второй плоскости (154) коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций. Способ может дополнительно содержать этап, на котором выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик (W1’) на первую плоскость коррекции и второй балансировочный грузик (W2) на вторую плоскость (154) коррекции с использованием вычисленного вектора воздействия.
С использованием иллюстративного способа можно определить массу и угловое положение первого калибровочного грузика М1 таким образом, чтобы обеспечивалась улучшенная реакция на вибрации. Эта улучшенная реакция на вибрации отражается во втором наборе измерений вибраций, на основании которого может быть получен улучшенный вектор воздействия для второй плоскости 154 коррекции. В свою очередь, это позволяет установить балансировочный грузик с оптимизированной массой в оптимизированное угловое положение. Соответственно, способ может улучшить общепринятые способы балансировки ротора посредством уменьшения времени, требуемого для уменьшения вибраций до допустимого уровня посредством использования улучшенного первого калибровочного грузика М1. Например, число балансировочных прогонов может быть уменьшено. Также, может быть уменьшено число плоскостей коррекции, необходимых для балансировки. Это может быть особенно желательным, когда некоторые плоскости коррекции являются труднодоступными.
Согласно некоторым примерам, эталонный вектор воздействия содержит модуль, который является средним значением модулей множества эталонных роторов, и эталонный вектор воздействия содержит фазу, которая является средним значением фаз множества эталонных роторов. Использование среднего значения может обеспечить эталонный вектор воздействия, который более точно описывает ротор (100).
Согласно некоторым примерам, этап установки первого калибровочного грузика содержит этапы, на которых: вычисляют калибровочную массу и калибровочное угловое положение для уменьшения вибраций на втором подшипнике с использованием эталонного вектора воздействия; выбирают первый калибровочный грузик таким образом, чтобы он имел массу, по существу соответствующую калибровочной массе; и устанавливают первый калибровочный грузик в угловое положение второй плоскости коррекции, по существу соответствующее калибровочному угловому положению. Посредством вычисления как массы, так и углового положения первого калибровочного грузика, результирующая реакция на вибрации может быть улучшена по сравнению с вычислением либо массы, либо углового положения, и использованием альтернативного способа, например, «ноу-хау», для вычисления другой величины из массы и углового положения.
Согласно некоторым примерам, модуль эталонного вектора воздействия первой плоскости (152) коррекции больше модуля эталонного вектора воздействия второй плоскости (154) коррекции, причем второй эталонный вектор воздействия либо содержится в наборе данных, либо может быть вычислен на основании измерений вибраций набора данных. Посредством сравнения модулей векторов воздействия можно идентифицировать чувствительную плоскость коррекции. Предполагается, что чувствительная плоскость коррекции имеет больший модуль. Модуль эталонного вектора воздействия первой плоскости (152) коррекции больше модуля эталонного вектора воздействия второй плоскости (154) коррекции по меньшей мере в два раза. Когда модули векторов воздействия сильно отличаются, это может указывать на то, что меньший вектор воздействия описывает нечувствительную плоскость коррекции. Настоящее изобретение, в частности, применимо к балансировке с использованием нечувствительной плоскости коррекции и может обеспечить значительное улучшение по сравнению с общепринятыми способами для нечувствительных плоскостей коррекции.
Согласно некоторым примерам, масса первого калибровочного грузика (М1) обратно пропорциональна модулю эталонного вектора воздействия второй плоскости (154) коррекции. Выбор массы первого калибровочного грузика, соответственно, может обеспечить уменьшение вибраций.
Согласно некоторым примерам, масса первого калибровочного грузика (М1) пропорциональна величине вибраций первого набора измерений вибраций, и обратно пропорциональна модулю эталонного вектора воздействия второй плоскости (154) коррекции. Выбор массы первого калибровочного грузика, соответственно, может обеспечить уменьшение вибраций.
Согласно некоторым примерам, масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости (154) коррекции. Вследствие малого модуля эталонного вектора воздействия, масса первого калибровочного грузика может иметь завышенное значение. Таким образом, можно улучшить уменьшение вибраций для выбора меньшего калибровочного грузика. Согласно некоторым примерам, масса первого калибровочного грузика меньше в 2-3 раза. Согласно некоторым примерам, масса первого калибровочного грузика находится между 20 граммами и 45 граммами.
Согласно некоторым примерам, этап установки первого балансировочного грузика содержит этапы, на которых: вычисляют балансировочную массу и балансировочное угловое положение для уменьшения вибраций на первом подшипнике и/или втором подшипнике с использованием вычисленного вектора воздействия; выбирают первый балансировочный грузик таким образом, чтобы он имел массу, по существу соответствующую балансировочной массе; и устанавливают первый балансировочный грузик в угловое положение второй плоскости коррекции, по существу соответствующее балансировочному угловому положению. Посредством вычисления как масс, так и угловых положений конечного балансировочного грузика (W1’), устанавливаемого на первую плоскость коррекции, и второго балансировочного грузика, устанавливаемого вторую плоскость коррекции, с использованием векторов воздействия, результирующие вибрации могут быть значительно снижены по сравнению с общепринятыми способами балансировки ротора.
Настоящее изобретение, в частности, применимо к балансировке с использованием нечувствительной плоскости коррекции и может обеспечить значительное улучшение по сравнению с общепринятыми способами для нечувствительных плоскостей коррекции.
Согласно некоторым примерам, способ содержит этап, на котором выполняют частичную балансировку, перед выполнением первого прогона с воздействием, посредством этапа, на котором устанавливают первый балансировочный грузик (W1) на первую плоскость (152) коррекции для уменьшения вибраций на первом подшипнике (140). С использованием частичной балансировки, вибрации на первом подшипнике (140) могут быть эффективно уменьшены, так что более точный вектор воздействия может быть вычислен для второй плоскости (154) коррекции, поскольку значительное относительное изменение вибраций, детектируемых на первом подшипнике (140), предполагается в ответ на установку первого калибровочного грузика (М1). Согласно одному примеру, во время второго прогона на первом подшипнике (140) записываются большие вибрации, чем во время первого прогона.
Согласно некоторым примерам, первая плоскость (152) коррекции расположена на турбинном диске ротора (100). Плоскость коррекции, расположенная на турбинном диске, может быть особенно пригодной для выполнения частичной балансировки, описанной выше, и может быть менее пригодной для приема первого калибровочного грузика (М1). Идентификация первой плоскости коррекции с использованием турбинного диска может, таким образом, улучшить эффективность балансировки ротора.
Согласно некоторым примерам, вторая плоскость (154) коррекции расположена на выходном коротком вале (108) ротора (100). Плоскость коррекции, расположенная на выходном коротком вале (108), может быть особенно пригодной для приема первого калибровочного грузика (М1). Идентификация второй плоскости (154) коррекции с использованием выходного короткого вала может, таким образом, улучшить эффективность балансировки ротора.
Согласно некоторым примерам, заданная балансировочная частота вращения является полной рабочей частотой вращения, равной или примерно равной первой критической частоте вращения ротора (100), при которой первая изгибная форма колебаний ротора становится значимой для соображений балансировки.
Согласно другому примеру, может быть обеспечен компьютерно-читаемый носитель данных, содержащий команды для выполнения способа согласно настоящему изобретению. С использованием иллюстративного способа можно определить массу и угловое положение первого калибровочного грузика М1 таким образом, чтобы обеспечивалась улучшенная реакция на вибрации. Эта улучшенная реакция на вибрации отражается во втором наборе измерений вибраций, на основании которого может быть получен улучшенный вектор воздействия для второй плоскости 154 коррекции. Соответственно, способ может улучшить общепринятые способы балансировки ротора посредством уменьшения времени, требуемого для уменьшения вибраций до допустимого уровня посредством использования улучшенного первого калибровочного грузика М1.
Согласно некоторым примерам, компьютерно-читаемый носитель данных выполнен с возможностью давать обрабатывающему блоку команду вычислить массу и угловое положение первого калибровочного грузика (М1) с использованием эталонного вектора воздействия второй плоскости (154) коррекции и вычислять вектор воздействия второй плоскости (154) коррекции. Это может дополнительно уменьшить время, необходимое для балансировки ротора с использованием настоящего способа балансировки ротора.
Согласно другому примеру, обеспечена балансировочная машина (200), содержащая компьютерно-читаемый носитель данных, описанный выше, причем балансировочная машина (200) содержит первое основание (212), выполненное с возможностью принимать первый подшипник (140), и второе основание (214), выполненное с возможностью принимать второй подшипник (142).
Таким образом, согласно первому объекту настоящего изобретения создан способ балансировки ротора для газовой турбины, при котором: обеспечивают ротор, содержащий: первый подшипник и второй подшипник, а также множество плоскостей коррекции, включающих в себя первую плоскость коррекции и вторую плоскость коррекции, причем имеется первый балансировочный грузик, который прикрепляют на первую плоскость коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием; выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике и втором подшипнике, при этом вибрации, детектируемые на первом подшипнике, имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике; обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора, относящегося к тому же типу изделий, что и ротор; устанавливают первый калибровочный грузик на вторую плоскость коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика, причем масса первого калибровочного грузика обратно пропорциональна модулю эталонного вектора воздействия второй плоскости коррекции; выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике и втором подшипнике, и удаляют первый калибровочный грузик с ротора; вычисляют вектор воздействия второй плоскости коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций; выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик на первую плоскость коррекции и устанавливают второй балансировочный грузик на вторую плоскость коррекции с использованием вычисленного вектора воздействия.
Предпочтительно, эталонный вектор воздействия содержит модуль, который является средним значением модулей множества эталонных роторов, и эталонный вектор воздействия содержит фазу, которая является средним значением фаз множества эталонных роторов.
Предпочтительно, при установке первого калибровочного грузика: вычисляют калибровочную массу и калибровочное угловое положение для уменьшения вибраций на втором подшипнике с использованием эталонного вектора воздействия; выбирают первый калибровочный грузик таким образом, чтобы он имел массу, по существу соответствующую калибровочной массе; и устанавливают первый калибровочный грузик в угловое положение второй плоскости коррекции, по существу соответствующее калибровочному угловому положению.
Предпочтительно, масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости коррекции.
Предпочтительно, масса первого калибровочного грузика меньше в 2-3 раза.
Предпочтительно, масса первого калибровочного грузика находится между 20 граммами и 45 граммами.
Предпочтительно, выполняют частичную балансировку, перед выполнением первого прогона с воздействием, посредством этапа, на котором устанавливают первый балансировочный грузик на первую плоскость коррекции для уменьшения вибраций на первом подшипнике.
Предпочтительно, во время второго прогона с воздействием на первом подшипнике записывают большие вибрации, чем во время первого прогона.
Предпочтительно, первая плоскость коррекции расположена на турбинном диске ротора.
Предпочтительно, вторая плоскость коррекции расположена на выходном коротком вале ротора.
Предпочтительно, заданная балансировочная частота вращения является полной рабочей частотой вращения, равной или примерно равной первой частоте вращения ротора, при которой форма колебаний ротора становится значимой для соображений балансировки.
Согласно второму объекту настоящего изобретения создан способ балансировки ротора для газовой турбины, при котором: обеспечивают ротор, содержащий: первый подшипник и второй подшипник, а также множество плоскостей коррекции, включающих в себя первую плоскость коррекции и вторую плоскость коррекции, причем имеется первый балансировочный грузик, который прикрепляют на первую плоскость коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием; выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике и втором подшипнике, при этом вибрации, детектируемые на первом подшипнике, имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике; обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора, относящегося к тому же типу изделий, что и ротор; устанавливают первый калибровочный грузик на вторую плоскость коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика, причем масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости коррекции; выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике и втором подшипнике, и удаляют первый калибровочный грузик с ротора; вычисляют вектор воздействия второй плоскости коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций; выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик на первую плоскость коррекции и устанавливают второй балансировочный грузик на вторую плоскость коррекции с использованием вычисленного вектора воздействия.
Согласно третьему объекту настоящего изобретения создан способ балансировки ротора для газовой турбины, при котором: обеспечивают ротор, содержащий: первый подшипник и второй подшипник, а также множество плоскостей коррекции, включающих в себя первую плоскость коррекции и вторую плоскость коррекции, причем имеется первый балансировочный грузик, который прикрепляют на первую плоскость коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием; выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике и втором подшипнике, при этом вибрации, детектируемые на первом подшипнике, имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике; обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора, относящегося к тому же типу изделий, что и ротор; устанавливают первый калибровочный грузик на вторую плоскость коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика, причем масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости коррекции, при этом масса первого калибровочного грузика меньше в 2-3 раза; выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике и втором подшипнике, и удаляют первый калибровочный грузик с ротора; вычисляют вектор воздействия второй плоскости коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций; выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик на первую плоскость коррекции и устанавливают второй балансировочный грузик на вторую плоскость коррекции с использованием вычисленного вектора воздействия.
Согласно четвертому объекту настоящего изобретения создан способ балансировки ротора для газовой турбины, при котором: обеспечивают ротор, содержащий: первый подшипник и второй подшипник, а также множество плоскостей коррекции, включающих в себя первую плоскость коррекции и вторую плоскость коррекции, причем имеется первый балансировочный грузик, который прикрепляют на первую плоскость коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием; выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике и втором подшипнике, при этом вибрации, детектируемые на первом подшипнике, имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике; обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора, относящегося к тому же типу изделий, что и ротор; устанавливают первый калибровочный грузик на вторую плоскость коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика, причем масса первого калибровочного грузика находится между 20 граммами и 45 граммами; выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике и втором подшипнике, и удаляют первый калибровочный грузик с ротора; вычисляют вектор воздействия второй плоскости коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций; выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик на первую плоскость коррекции и устанавливают второй балансировочный грузик на вторую плоскость коррекции с использованием вычисленного вектора воздействия.
Согласно пятому объекту настоящего изобретения создан компьютерно-читаемый носитель данных, содержащий команды для выполнения вышеописанного способа.
Предпочтительно, компьютерно-читаемый носитель данных выполнен с возможностью выдачи обрабатывающему блоку команды на вычисление массы и углового положения первого калибровочного грузика с использованием эталонного вектора воздействия второй плоскости коррекции и вычисление вектора воздействия второй плоскости коррекции.
Согласно шестому объекту настоящего изобретения создана балансировочная машина, содержащая вышеописанный компьютерно-читаемый носитель данных, причем балансировочная машина содержит первое основание, выполненное с возможностью принятия первого подшипника, и второе основание, выполненное с возможностью принятия второго подшипника.
Краткое описание чертежей
Примеры настоящего изобретения будут теперь описаны со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 является схематическим изображением примера турбомашины;
Фиг. 2 является поперечным сечением известного ротора турбомашины;
Фиг. 3 является частичным поперечным сечением балансировочной машины согласно настоящему изобретению и известного ротора, показанного на фиг. 2; и
Фиг. 4 показывает способ балансировки ротора согласно настоящему изобретению.
Подробное описание изобретения
Настоящее изобретение относится к способу балансировки ротора, используемого в турбомашине, такой как газовая турбина.
В качестве контекста, фиг. 1 показывает известное расположение, к которому могут быть применены признаки настоящего изобретения.
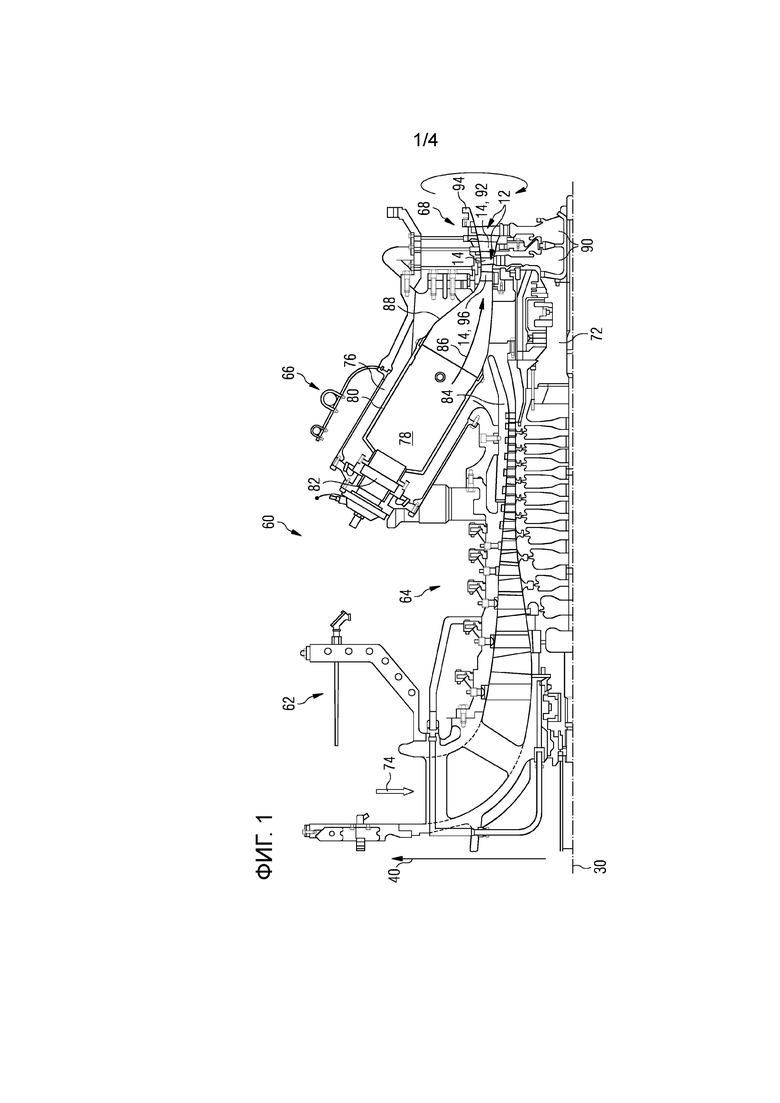
Фиг. 1 показывает пример газотурбинного двигателя 60 в сечении, которое показывает природу ротора и среду, в которой он работает. Газотурбинный двигатель 60 содержит, последовательно, впускное отверстие 62, секцию 64 компрессора, секцию 66 сгорания, и секцию 68 турбины, которые обычно расположены последовательно и обычно расположены в направлении продольной оси или оси 30 вращения. Газотурбинный двигатель 60 дополнительно содержит вал 72 ротора, который может вращаться относительно оси 30 вращения и который продолжается продольно через газотурбинный двигатель 60. Ось 30 вращения обычно является осью вращения соответствующего газотурбинного двигателя. Следовательно, любыми ориентирами для «осевого», «радиального» и «кругового» направлений являются ориентиры относительно оси 30 вращения. Радиальное направление 40 по существу перпендикулярно оси 30 вращения, в то время как круговое направление перпендикулярно как оси 30 вращения, так и радиальному направлению 40.
Вал 72 соединяет с возможностью передачи движения секцию 68 турбины и секцию 64 компрессора.
При работе газотурбинного двигателя 60, воздух 74, который втягивается через впускное отверстие 62 воздуха, сжимается секцией 64 компрессора и доставляется в секцию сгорания или секцию 66 горелок. Секция 66 горелок содержит ресивер 76 горелок, одну или несколько камер 78 сгорания, определяемых оболочкой 80 с двойной стенкой, и по меньшей мере одну горелку 82, установленную в каждой камере 78 сгорания. Камеры 78 сгорания и горелки 82 расположены внутри ресивера 76 горелок. Сжатый воздух, проходящий через секцию 64 компрессора, входит в диффузор 84 и выпускается из диффузора 84 в ресивер 76 горелок, откуда часть воздуха входит в горелку 82 и смешивается с газообразным или жидким топливом. Смесь воздуха/топлива затем сгорает, и газ 86 сгорания, или рабочий газ, образованный продуктами сгорания, направляется по каналу через проходной тракт 88 в секцию 68 турбины.
Секция 68 турбины может содержать некоторое количество несущих-лопатки дисков 90 или рабочих колес турбины, прикрепленных к валу 72 ротора. В показанном примере, секция 68 турбины содержит два диска 90, каждый из которых несет кольцевой массив турбинных модулей 12, каждый из которых содержит аэродинамический профиль 14, реализованный в виде лопатки турбины. Решетки 92 турбины расположены между лопатками турбины. Каждая решетка 92 турбины несет кольцевой массив турбинных модулей 12, каждый из которых содержит аэродинамический профиль 14 в форме направляющих лопастей, которые прикреплены к статору газотурбинного двигателя 60.
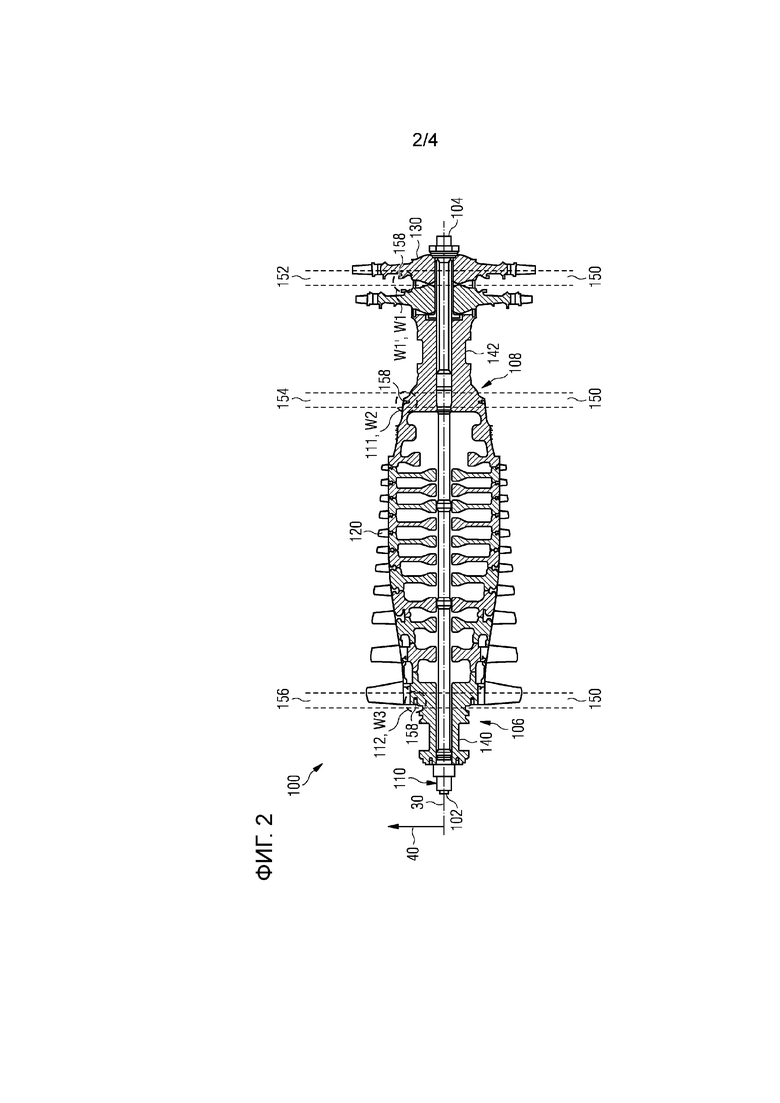
Фиг. 2 является схематическим поперечным сечением иллюстративного ротора 100, к которому может быть применен способ балансировки ротора согласно настоящему изобретению.
Ротор 100 (или «ротор в сборе») имеет удлиненную форму. Например, ротор в сборе газовой турбины фиг. 1 содержит, в общем, цилиндрический вал 72 ротора, несущий множество дисков турбины и дисков 90 компрессора. Продольный размер ротора 100 ограничен парой аксиальных концов 102, 104. Первый аксиальный конец 102 является верхним по потоку концом относительно потока рабочей текучей среды, в то время как второй аксиальный конец 104 является нижним по потоку концом.
Ротор 100 содержит входной короткий вал 106 и выходной короткий вал 108. Входной короткий вал 106 расположен по направлению к первому концу 102, в то время как выходной короткий вал 108 расположен по направлению ко второму концу 104. Дополнительно, ротор 100 содержит вал 110 ротора, несущий силовые турбинные роторные диски 120 и турбинные роторные диски 130. Роторные диски 120, 130 несет вал 110 ротора.
Ротор 100 содержит пару подшипников 140, 142. Эти подшипники (или «опорные участки» или «пояски») выполнены с возможностью приниматься внутри корпусов подшипников газовой турбины. Согласно настоящему примеру, каждый подшипник 140, 142 содержит гладкую радиальную поверхность, коаксиально расположенную вокруг оси 30 вращения. Посредством подшипников, ротор 100 радиально располагается и поддерживается против действия сил в радиальном направлении 40. Такие силы включают в себя вес ротора, а также динамические силы, в частности, силы, являющиеся следствием дисбаланса ротора 100.
На роторе 100 обеспечено множество плоскостей 150 коррекции, посредством которых может быть уменьшен дисбаланс ротора 100. В соответствии с использованием термина «плоскость коррекции» в данной области техники следует понимать, что он относится к структурному признаку ротора, а не к геометрической плоскости. Другими словами, плоскость коррекции является областью или сегментом ротора 100. Плоскости 150 коррекции выполнены с возможностью селективно принимать и удерживать дополнительную массу таким образом, чтобы распределение масс ротора 100 могло быть изменено посредством добавления упомянутой дополнительной массы. Другими словами, каждая плоскость 150 коррекции выполнена с возможностью принимать и удерживать грузики в отверстиях 158 (или «углублениях»), определяемых ротором 100.
Множественные плоскости 150 коррекции находятся на расстоянии друг от друга вдоль оси 30 вращения. Таким образом обеспечивается средство для настройки распределения масс в каждом аксиальном положении, где расположена плоскость коррекции. В некоторых известных роторах, плоскости коррекции расположены там, где конструкция ротора это позволяет, а не там, где это было бы желательно. Другими словами, вследствие конструктивных ограничений плоскости коррекции расположены там, где конструктивно возможно их обеспечить, но не обязательно в областях, которые обеспечивают максимальную реакцию на балансировочную настройку. Дополнительно, некоторые плоскости коррекции могут быть труднодоступными, поскольку другие конструкции ротора могут затруднять доступ к ним. Таким образом, считается желательным оптимизировать эффективность доступных плоскостей коррекции.
Согласно настоящему примеру, обеспечена первая плоскость 152 коррекции, вторая плоскость 154 коррекции, и третья плоскость 156 коррекции. Первая плоскость 152 коррекции обеспечена на турбинном роторном диске 130. Вторая плоскость 154 коррекции обеспечена на выходном коротком вале 108. Третья плоскость 156 коррекции обеспечена на входном коротком вале 106.
Каждая плоскость 150 коррекции содержит множество отверстий 158, причем каждое множество отверстий 158 расположено симметрично относительно оси 30 вращения. Отверстия 158 плоскости 150 коррекции обеспечены с регулярными интервалами, т.е., с эквидистантными угловыми интервалами, и с фиксированным радиальным расстоянием от оси 30 вращения. Каждое отверстие 158 данной плоскости 152, 154, 156 коррекции, таким образом, имеет конкретное угловое положение. Это конкретное угловое положение может быть использовано для идентификации конкретного отверстия 158 конкретной плоскости 152, 154, 156 коррекции.
Согласно некоторым примерам, плоскость 150 коррекции содержит от шестнадцати до двадцати отверстий 158. Согласно настоящему примеру, обеспечено двадцать отверстий 158, что приводит к угловому интервалу между смежными отверстиями 158, составляющему 18° (градусов дуги) или, эквивалентно, π/10 рад (радиан). Грузик может быть установлен в каждое отверстие для изменения распределения масс ротора 100 в целях балансировки ротора 100.
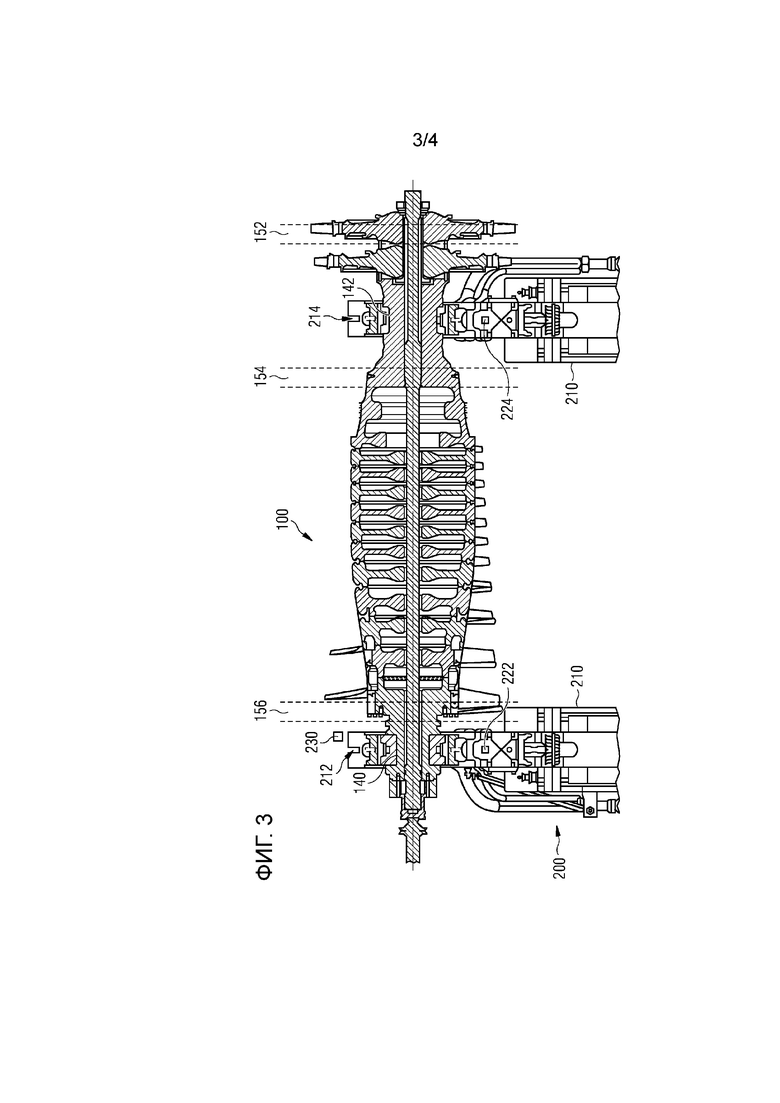
Фиг. 3 является схематическим поперечным сечением ротора 100 и балансировочной машины 200. Балансировочная машина 200 является элементом испытательного оборудования, выполненного с возможностью имитировать работу ротора 100 в газовой турбине и оценивать характеристики ротора 100 при таких рабочих условиях.
Ротор 100 может быть установлен на балансировочную машину 200 посредством множества оснований 210. Основания 210 выполнены с возможностью нести ротор 100 посредством приема и удерживания подшипников 140, 142. Согласно настоящему примеру, обеспечено первое основание 212 и второе основание 214. Первое основание 212 выполнено с возможностью принимать первый подшипник 140, в то время как второе основание 214 выполнено с возможностью принимать второй подшипник 142.
Балансировочная машина 200 выполнена с возможностью подвергать ротор 100, установленный на нее, вращению с частотой вращения, соответствующей заданной балансировочной частоте вращения. Заданная балансировочная частота вращения является заданной частотой вращения, которая, согласно некоторым примерам, соответствует рабочей частоте вращения ротора 100. В целях высокочастотной балансировки, балансировочная машина 200 может быть выполнена с возможностью подвергать ротор 100 вращению с частотой вращения, равной или примерно равной критической частоте вращения ротора 100, при которой форма колебаний ротора становится значимой для соображений балансировки. Например, ротор может быть подвергнут вращению с частотой вращения, равной или примерно равной первой критической частоте вращения ротора 100, при которой первая изгибная форма колебаний ротора становится значимой для соображений балансировки.
Балансировочная машина 200 содержит множество датчиков вибрации. Согласно настоящему примеру, обеспечен первый датчик 222 вибрации и второй датчик 224 вибрации. Первый датчик 222 вибрации расположен на первом основании 212 и выполнен с возможностью измерять вибрации, которым подвергается первое основание 212. Подобным образом, второй датчик 224 вибрации расположен на втором основании 214 и выполнен с возможностью измерять вибрации, которым подвергается второе основание 214. Такие вибрации могут быть вызваны дисбалансом ротора 100 либо на одном, либо на обоих основаниях 212, 214.
Балансировочная машина 200 содержит датчик 230 фазы, выполненный с возможностью детектировать обороты ротора 100. Согласно некоторым примерам, датчик 230 фазы является оптическим датчиком, выполненным с возможностью регистрировать обороты видимого признака на роторе 100, например, метки, нанесенной на поверхность ротора 100. С использованием датчика 230 фазы может быть определена фаза ротора 100, т.е., его ориентация.
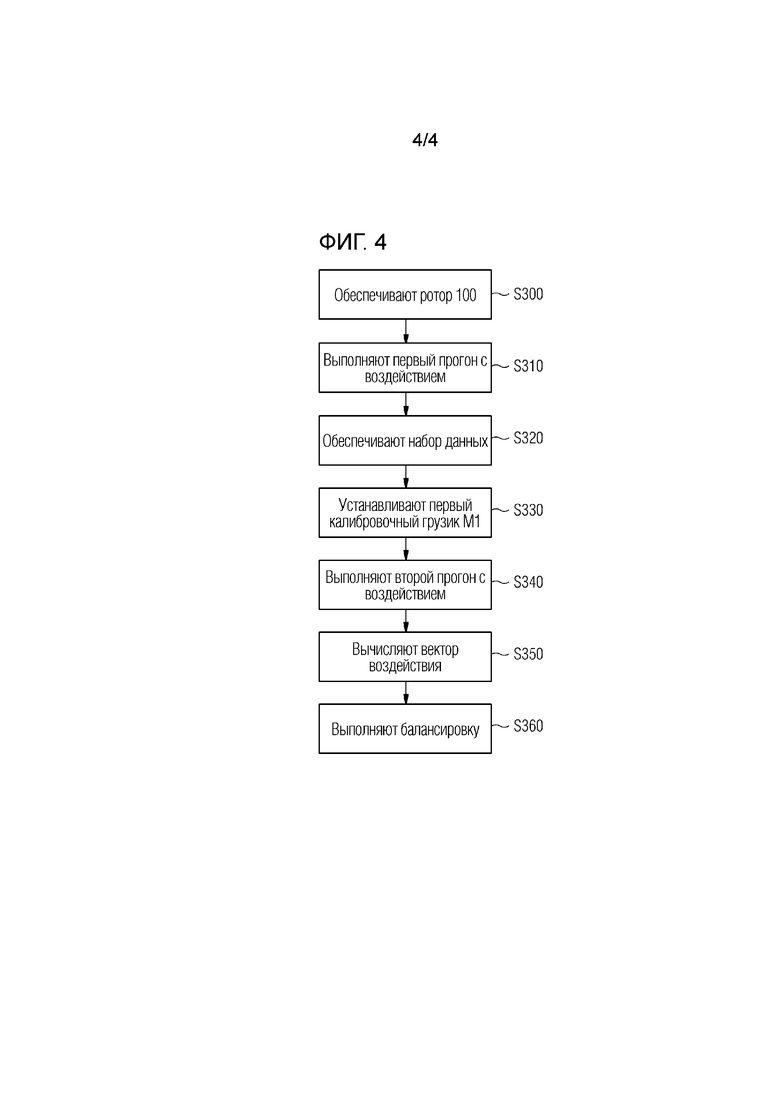
Фиг. 4 показывает иллюстративный способ балансировки ротора 100 с использованием балансировочной машины 200. Иллюстративный способ содержит этапы S300 - S370.
Способ содержит этап S300, согласно которому обеспечивают ротор 100, описанный выше. Первый балансировочный грузик W1 прикрепляют на первую плоскость 152 коррекции ротора 100. Посредством первого балансировочного грузика W1 ротор 100 частично балансируется. Другими словами, вибрации на одном из подшипников 140, 142 или, соответственно, одном из оснований 210 уменьшаются посредством первого балансировочного грузика W1, согласно некоторым примерам, до величины, меньшей или около 1 мм/с. Первый балансировочный грузик W1 имеет массу и угловое положение, которые выбираются согласно любому пригодному процессу, пример которого описан ниже.
Способ содержит этап S310, на котором выполняют первый прогон с воздействием. Первый прогон с воздействием содержит этапы, на которых приводят во вращение ротор 100 с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике 140 и втором подшипнике 142. Датчики 222, 224 вибрации, обеспеченные на основаниях 210, используются для измерения вибраций.
Любые вибрации, детектируемые на подшипниках, оценивают и определяют, являются ли эти вибрации, и в какой степени являются, результатом дисбаланса ротора 100. Согласно настоящему примеру, единственной причиной вибраций является дисбаланс ротора 100.
Первый набор измерений R вибраций содержит первый вибрационный сигнал R1 вибраций, записываемый на первом подшипнике 140 или первом основании 212, и второй вибрационный сигнал R2, записываемый на втором подшипнике 142 или втором основании 214. Каждый вибрационный сигнал R1, R2 содержит информацию о величине вибраций и фазе вибраций на соответствующем подшипнике 140, 142 или основании 212, 214. Другими словами, вибрационный сигнал содержит информацию о векторе.
Согласно настоящему изобретению, вибрации на одном подшипнике имеют меньшую величину, чем вибрации, детектируемые на другом подшипнике, в результате частичной балансировки посредством первого балансировочного грузика W1. Согласно настоящему примеру, вибрации, детектируемые на первом подшипнике 140, имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике 142, приблизительно на 1,1 мм/с. Первый балансировочный грузик W1 остается установленным для выполняемых впоследствии первого прогона с воздействием и второго прогона с воздействием.
Способ содержит этап S320, на котором обеспечивают набор данных, содержащий эталонный вектор воздействия второй плоскости 154 коррекции. Этот этап выполняют перед этапом S340, который требует этого набора данных, но не обязательно после предыдущих этапов S300, S310.
Эталонный вектор воздействия второй плоскости 154 коррекции является вектором воздействия эталонного ротора 100, а не вектором воздействия балансируемого ротора 100. Ротор 100 и эталонный ротор 100 относятся к одной и той же серии изделий, т.е., типу изделий, и, следовательно, являются по существу идентичными. Набор данных относительно эталонного ротора 100, таким образом, используется в качестве аппроксимации для балансировки ротора 100. Использование эталонного вектора воздействия считается особенно желательным, поскольку было обнаружено, что это обеспечивает улучшенный набор значений массы и углового положения.
Способ содержит этап S330, на котором устанавливают первый калибровочный грузик М1 на вторую плоскость 154 коррекции. В общем, калибровочный грузик является испытательной массой, которая добавляется на плоскость 150 коррекции ротора 100 для определения влияния испытательной массы на вибрации на подшипниках, чтобы сделать вывод о том, какое влияние будет оказывать балансировочный грузик. Только один калибровочный грузик добавляют на ротор 100 в любой данный момент времени для определения реакции на упомянутый один калибровочный грузик (дополнительно к первому калибровочному грузику).
Первый калибровочный грузик М1, в общем, характеризуется своей массой и своим угловым положением на плоскости коррекции, на которой он установлен. Масса и угловое положение первого калибровочного грузика могут быть определены с использованием любого пригодного средства, например, Уравнения 1, приведенного ниже. Согласно настоящему примеру, массу и угловое положение первого калибровочного грузика М1 определяют с использованием измерения R вибраций и эталонного вектора H2’ воздействия. Эталонный вектор H2’ воздействия является величиной, которая описывает или по меньшей мере аппроксимирует влияние, которое грузик, добавленный на вторую плоскость коррекции, оказывает на вибрации, детектируемые на подшипниках 140, 142. В частности, первый компонент H21’ эталонного вектора H2’ воздействия описывает влияние на вибрации на первом подшипнике 140 или основании 212, и второй компонент H22’ описывает влияние на вибрации на втором подшипнике 142 или основании 214. Каждый компонент имеет величину и фазу, т.е., определяет вектор.
Этап S330 содержит этап, на котором используют эталонный вектор воздействия для определения массы и углового положения первого калибровочного грузика М1. Массу и угловое положение калибровочного грузика выбирают в зависимости от вибраций, детектируемых на одном подшипнике, для уменьшения вибраций на упомянутом одном подшипнике. А именно, было обнаружено, что реакция на вибрации некоторых известных роторов критически зависит от значений массы и углового положения. Набор случайно выбранных значений может, таким образом, приводить к плохой реакции на вибрации и, в конце концов, к неэффективному балансировочному грузику. Согласно настоящему примеру, первый калибровочный грузик М1 прикрепляют на вторую плоскость коррекции для уменьшения вибраций на втором подшипнике 142.
Способ содержит этап S340, на котором выполняют второй прогон с воздействием. Второй прогон с воздействием содержит этапы, на которых приводят во вращение ротор 100 с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике 140 и втором подшипнике 142. Вибрации записывают во второй набор измерений Р вибраций, содержащий первый вибрационный сигнал Р1 первого подшипника 140 (или первого основания 212) и второй вибрационный сигнал Р2 второго подшипника 142 (или второго основания 214). Как и выше, каждый вибрационный сигнал содержит информацию о величине вибраций и фазе вибраций на соответствующем основании.
Способ содержит этап S350, на котором вычисляют вектор воздействия второй плоскости 154 коррекции. Этап S350 содержит этап, на котором используют первый набор измерений вибраций и второй набор измерений вибраций для вычисления вектора воздействия второй плоскости 154 коррекции. Может быть использовано любое известное средство, пригодное для осуществления этого вычисления.
Способ содержит этап S360, на котором выполняют балансировку ротора 100. Этап S360 содержит этапы, на которых устанавливают конечный балансировочный грузик W1’ на первую плоскость 152 коррекции и второй балансировочный грузик W2 на вторую плоскость 154 коррекции с использованием векторов воздействия первой плоскости 152 коррекции и второй плоскости 154 коррекции. Массы и угловые положения конечного балансировочного грузика W1’ и второго балансировочного грузика W2 могут быть определены с использованием любого пригодного средства, и в нижеследующих разделах настоящего изобретения будет описан конкретный пример того, как общепринятое средство вычисления может быть использовано для эффективного получения точных результатов.
Согласно настоящему примеру, модуль вектора воздействия второй плоскости коррекции меньше модуля вектора воздействия (или эталонного вектора воздействия) первой плоскости коррекции. Другими словами, вторая плоскость 154 коррекции менее чувствительна, чем первая плоскость 152 коррекции.
Согласно некоторым примерам, с использованием эталонного вектора H2’ воздействия вычисляют калибровочную массу и калибровочное угловое положение для уменьшения вибраций на втором подшипнике 142. Первый калибровочный грузик М1 выбирают таким образом, чтобы он имел массу, по существу соответствующую калибровочной массе или «значению калибровочной массы», и устанавливают на вторую плоскость 154 коррекции в угловое положение, по существу соответствующее калибровочному угловому положению или «значению калибровочного углового положения».
Массу и угловое положение первого калибровочного грузика М1 вычисляют в некоторых примерах с использованием:
M1 = -R1/H22’, (Уравнение 1),
т.е., М1 равняется минус R1, деленное на H22’. Согласно вышеупомянутому Уравнению 1, калибровочный грузик выражается в виде функции массы и углового положения. Масса может быть выражена в граммах, в то время как угловое положение может быть выражено в градусах дуги. Реакция R1 на вибрации зависит от амплитуды вибраций, выражаемой в миллиметрах в секунду, и фазы вибраций, выражаемой в градусах дуги. Вектор воздействия имеет модуль, выражаемый в миллиметрах в секунду на грамм, и фазу, выражаемую в градусах дуги.
Согласно некоторым примерам предполагается, что вычисляемая масса первого калибровочного грузика М1 является слишком большой, например, вплоть до 80 грамм, вследствие очень малого эталонного вектора H2’ воздействия второй плоскости 154 коррекции. Первый калибровочный грузик М1 может иметь массу, соответствующую доле вычисленной массы; например, половине или трети. Согласно настоящему примеру, первый калибровочный грузик М1 выбирают таким образом, чтобы он имел массу между 40 г и 26,7 г и угловое положение, вычисленное из Уравнения 1.
Согласно некоторым примерам, модуль эталонного вектора воздействия первой плоскости 152 коррекции больше модуля эталонного вектора воздействия второй плоскости 154 коррекции. Посредством сравнения модулей векторов воздействия можно идентифицировать чувствительную плоскость коррекции. Предполагается, что чувствительная плоскость коррекции имеет больший модуль. Например, модуль первого эталонного вектора воздействия может быть больше модуля второго эталонного вектора воздействия по меньшей мере в два раза. Когда модули векторов воздействия сильно отличаются, это может указывать на то, что меньший вектор воздействия описывает нечувствительную плоскость коррекции. Дополнительно, было обнаружено, что фаза эталонного вектора воздействия эталонного ротора 100 может значительно отличаться от фактической фазы ротора 100. Способ согласно настоящему изобретению компенсирует это вычисляемым первым калибровочным грузиком М1 и уменьшенными вибрациями на первом подшипнике 140, так что предполагается относительно большое и точное отличие реакций на вибрации относительно первого набора измерений R вибраций.
Точность аппроксимации Н2 с использованием H2’ может быть оптимизирована посредством использования среднего эталонного вектора воздействия. Другими словами, эталонный вектор H2’ воздействия вычисляют с использованием векторов воздействия множества эталонных роторов 100. Средний эталонный вектор H2’ воздействия имеет модуль, соответствующий среднему значению модулей векторов воздействия эталонных роторов 100, и, подобным образом, фазу, соответствующую среднему значению фаз векторов воздействия. Среднее значение может быть вычислено в любой пригодной форме, например, в форме среднего значения, медианы или моды.
Массу и угловое положение конечного балансировочного грузика W1’ и второго балансировочного грузика W2 вычисляют согласно векторам воздействия первой плоскости коррекции и второй плоскости коррекции. Вектор воздействия второй плоскости коррекции был вычислен на основании первого и второго наборов измерений вибраций. В частности, предполагается, что этот вектор воздействия точно описывает влияние балансировочного грузика, добавляемого на вторую плоскость коррекции, поскольку эталонный вектор H2’ воздействия приводит к улучшенной реакции на вибрации. Более конкретно, эта процедура содержит этап, на котором вычисляют балансировочные массы и их балансировочные угловые положения для достижения вибраций на первом подшипнике и втором подшипнике, находящихся в пределах допустимого предела вибраций, с использованием вычисляемого вектора воздействия. Согласно настоящему примеру, эта процедура содержит этап, на котором выбирают первый балансировочный грузик таким образом, чтобы он имел массу, по существу соответствующую балансировочной массе; и устанавливают второй балансировочный грузик W2 в угловое положение второй плоскости коррекции, по существу соответствующее балансировочному угловому положению. Согласно настоящему примеру, эта процедура также содержит этап, на котором выбирают конечный балансировочный грузик W1’ таким образом, чтобы он имел пригодную массу и угловое положение.
Согласно настоящему примеру, способ содержит этап, на котором частично балансируют ротор 100. Частичную балансировку выполняют перед первым прогоном с воздействием посредством установки первого балансировочного грузика W1 на первую плоскость 152 коррекции для уменьшения вибраций на одном подшипнике. В этом случае, вибрации на первом подшипнике 140 или основании 212 уменьшают посредством частичной балансировки. Другими словами, массу и угловое положение первого балансировочного грузика W1 выбирают в зависимости от вибраций на первом подшипнике 140. Первый балансировочный грузик W1 может уменьшить или увеличить вибрации на втором подшипнике 142.
Подобно тому, как первый балансировочный грузик W1 конфигурируют в зависимости от вибраций на первом подшипнике 140, первый калибровочный грузик М1 конфигурируют исключительно в зависимости от вибраций на втором подшипнике 142. Соответственно, первый калибровочный грузик М1 может уменьшить или увеличить вибрации на первом подшипнике 140. В настоящем примере, влияние первого калибровочного грузика М1 состоит в увеличении вибраций на первом подшипнике 140. Таким образом, во время второго прогона на первом подшипнике 140 измеряются большие вибрации, чем во время первого прогона. При условии, что вибрации на первом подшипнике 140 малы, влияние первого калибровочного грузика М1 будет значительным даже тогда, когда вторая плоскость 154 коррекции является нечувствительной. Соответственно, в результате может быть получен более точный вектор воздействия.
Согласно настоящему примеру, способ, описанный выше, обеспечивается на компьютерно-читаемом носителе данных, таком как жесткий диск или оптический диск. Другими словами, команды для выполнения вышеупомянутого способа, в частности, в отношении этапов S300 - S370, обеспечены на компьютерно-читаемом носителе данных. Например, с использованием пригодного языка программирования может быть, таким образом, обеспечена прикладная программа для выполнения способа. Более конкретно, компьютерно-читаемый носитель данных может быть выполнен с возможностью давать обрабатывающему блоку команду выполнить некоторые этапы способа и может быть выполнен с возможностью давать оператору команду выполнить другие этапы способа. Например, этапы S300, S310 могут быть выполнены оператором. Другие этапы, которые могут быть выполнены оператором, включают в себя этап S330 установки грузиков.
Компьютерно-читаемый носитель данных выполнен с возможностью давать обрабатывающему блоку, такому как центральный процессор, команду вычислить массу и угловое положение первого калибровочного грузика М1 с использованием эталонного вектора H2’ воздействия, вычислить вектор воздействия второй плоскости 154 коррекции. В настоящем примере, компьютерно-читаемый носитель данных также содержит эталонный вектор H2’ воздействия или, в зависимости от обстоятельств, средний эталонный вектор воздействия.
Компьютерно-читаемый носитель данных может быть частью балансировочной машины 200. Другими словами, балансировочная машина 200 содержит компьютерно-читаемый носитель данных.
Уделено внимание всем работам и документам, которые поданы одновременно с этим описанием изобретения или до него в связи с этой заявкой и которые открыты для публичного обозрения вместе с этим описанием изобретения, и полное содержание всех таких работ и документов включено в эту заявку по ссылке.
Все признаки, раскрытые в этом описании изобретения (в том числе любые пункты прилагаемой формулы изобретения, реферат и чертежи) и/или все этапы любого способа или процесса, раскрытого здесь, могут быть объединены в любой комбинации, за исключением комбинаций, в которых по меньшей мере некоторые из таких признаков и/или этапов являются взаимоисключающими.
Каждый признак, раскрытый в этом описании изобретения (в том числе любые пункты прилагаемой формулы изобретения, реферат и чертежи) может быть заменен альтернативными признаками, служащими тем же самым, эквивалентным или подобным целям, если явно не указано иное. Таким образом, если явно не указано иное, то каждый раскрытый признак является только одним примером обобщенного ряда эквивалентных или подобных признаков.
Настоящее изобретение не ограничено деталями вышеупомянутого варианта (вариантов) осуществления. Настоящее изобретение распространяется на любой новый признак или на любую новую комбинацию признаков, раскрытых в этом описании изобретения (в том числе в любом пункте прилагаемой формулы изобретения, реферате и чертежах), или на любой новый этап или любую новую комбинацию этапов любого способа или процесса, раскрытого здесь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2019 |
|
RU2756710C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ НИЗКОЧАСТОТНОГО ДИНАМИЧЕСКОГО БАЛАНСИРОВОЧНОГО СТЕНДА | 2010 |
|
RU2434212C1 |
| Способ динамической балансировки ротора в двух плоскостях коррекции | 2022 |
|
RU2790897C1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| Способ определения динамического дисбаланса ротора авиационного газотурбинного двигателя | 2016 |
|
RU2627750C1 |
| Способ балансировки ротора газоперекачивающего агрегата | 2017 |
|
RU2658597C1 |
Предложен способ балансировки ротора для газовой турбины. Способ включает этап, на котором обеспечивают ротор (100), содержащий первую плоскость (152) коррекции и вторую плоскость (154) коррекции, причем первый балансировочный грузик (W1) прикрепляют на первую плоскость (152) коррекции. Способ включает этап, на котором выполняют первый прогон с воздействием. Первый балансировочный грузик (W1) остается установленным для последующего второго прогона с воздействием. Способ включает этап, на котором устанавливают первый калибровочный грузик (М1) на вторую плоскость (154) коррекции с использованием эталонного вектора воздействия. Способ содержит этап, на котором выполняют второй прогон с воздействием. Способ включает этап, на котором удаляют первый калибровочный грузик (М1) с ротора (100) и вычисляют вектор воздействия второй плоскости (154) коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций, полученных во время первого прогона с воздействием и второго прогона с воздействием соответственно. Способ включает этап, на котором выполняют балансировку ротора посредством этапов, на которых устанавливают конечный балансировочный грузик (W1’) на первую плоскость (152) коррекции и второй балансировочный грузик (W2) на вторую плоскость (154) коррекции с использованием вычисленных векторов воздействия. Предложенный способ позволяет ускорить и облегчить процесс проведения балансировки и улучшить эффективность ротора для газовой турбины. 6 н. и 11 з.п. ф-лы, 4 ил.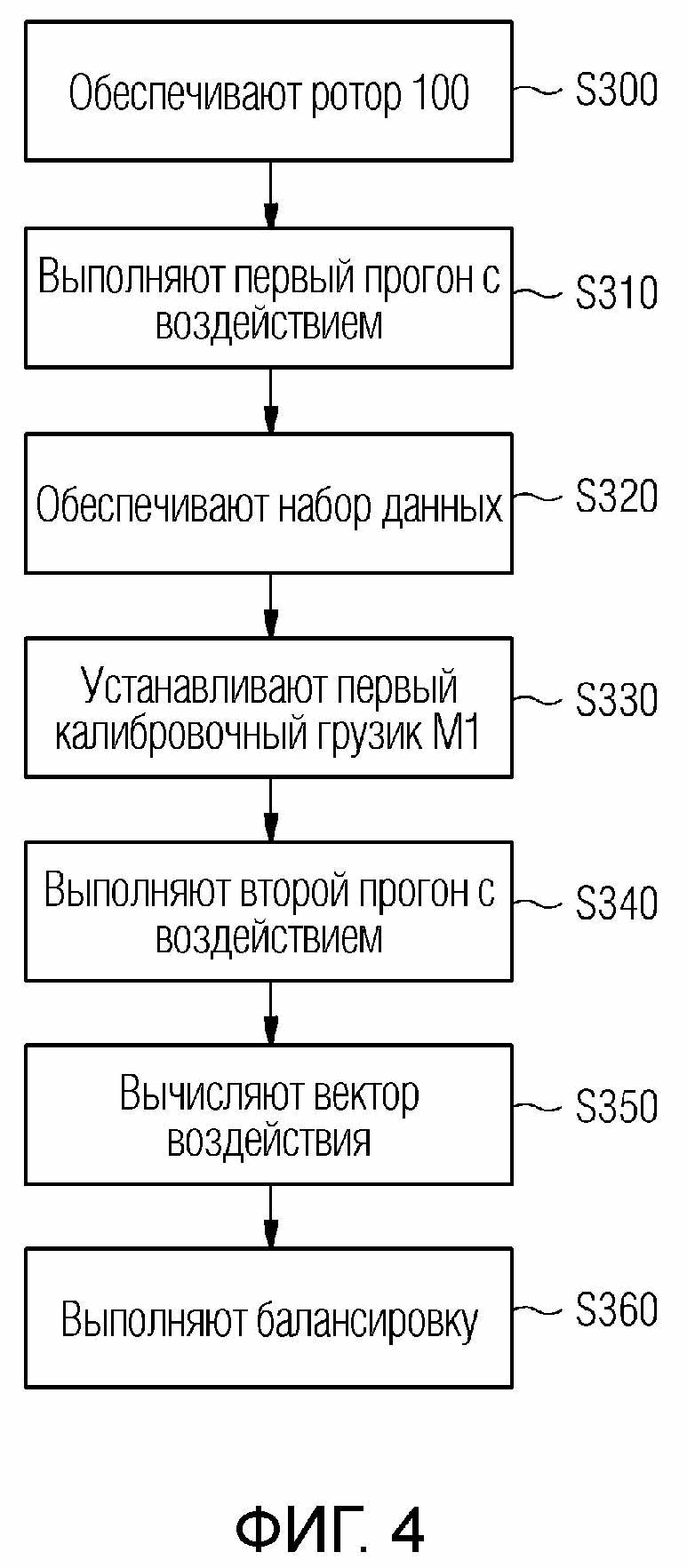
1. Способ балансировки ротора для газовой турбины, при котором:
обеспечивают ротор (100), содержащий: первый подшипник (140) и второй подшипник (142), а также множество плоскостей (150) коррекции, включающих в себя первую плоскость (152) коррекции и вторую плоскость (154) коррекции, причем имеется первый балансировочный грузик (W1), который прикрепляют на первую плоскость (152) коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием;
выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), при этом вибрации, детектируемые на первом подшипнике (140), имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике (142);
обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости (154) коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора (100), относящегося к тому же типу изделий, что и ротор (100);
устанавливают первый калибровочный грузик (М1) на вторую плоскость (154) коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика (М1), причем масса первого калибровочного грузика (М1) обратно пропорциональна модулю эталонного вектора воздействия второй плоскости (154) коррекции;
выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), и удаляют первый калибровочный грузик (М1) с ротора (100);
вычисляют вектор воздействия второй плоскости (154) коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций;
выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик (W1’) на первую плоскость (152) коррекции и устанавливают второй балансировочный грузик (W2) на вторую плоскость (154) коррекции с использованием вычисленного вектора воздействия.
2. Способ по п. 1, при котором эталонный вектор воздействия содержит модуль, который является средним значением модулей множества эталонных роторов (100), и эталонный вектор воздействия содержит фазу, которая является средним значением фаз множества эталонных роторов (100).
3. Способ по п. 1 или 2, при котором при установке первого калибровочного грузика (М1): вычисляют калибровочную массу и калибровочное угловое положение для уменьшения вибраций на втором подшипнике с использованием эталонного вектора воздействия; выбирают первый калибровочный грузик (М1) таким образом, чтобы он имел массу, по существу соответствующую калибровочной массе; и устанавливают первый калибровочный грузик (М1) в угловое положение второй плоскости коррекции, по существу соответствующее калибровочному угловому положению.
4. Способ по любому из пп. 1-3, при котором масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости (154) коррекции.
5. Способ по п. 4, при котором масса первого калибровочного грузика меньше в 2-3 раза.
6. Способ по любому из пп. 1-5, при котором масса первого калибровочного грузика находится между 20 граммами и 45 граммами.
7. Способ по любому из пп. 1-6, при котором выполняют частичную балансировку, перед выполнением первого прогона с воздействием, посредством этапа, на котором устанавливают первый балансировочный грузик (W1) на первую плоскость (152) коррекции для уменьшения вибраций на первом подшипнике (140).
8. Способ по любому из пп. 1-7, при котором во время второго прогона с воздействием на первом подшипнике (140) записывают большие вибрации, чем во время первого прогона.
9. Способ по любому из пп. 1-8, при котором первая плоскость (152) коррекции расположена на турбинном диске ротора (100).
10. Способ по любому из пп. 1-9, при котором вторая плоскость (154) коррекции расположена на выходном коротком валу (108) ротора (100).
11. Способ по любому из пп. 1-10, при котором заданная балансировочная частота вращения является полной рабочей частотой вращения, равной или примерно равной первой частоте вращения ротора (100), при которой форма колебаний ротора становится значимой для соображений балансировки.
12. Способ балансировки ротора для газовой турбины, при котором:
обеспечивают ротор (100), содержащий: первый подшипник (140) и второй подшипник (142), а также множество плоскостей (150) коррекции, включающих в себя первую плоскость (152) коррекции и вторую плоскость (154) коррекции, причем имеется первый балансировочный грузик (W1), который прикрепляют на первую плоскость (152) коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием;
выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), при этом вибрации, детектируемые на первом подшипнике (140), имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике (142);
обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости (154) коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора (100), относящегося к тому же типу изделий, что и ротор (100);
устанавливают первый калибровочный грузик (М1) на вторую плоскость (154) коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика (М1), причем масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости (154) коррекции;
выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), и удаляют первый калибровочный грузик (М1) с ротора (100);
вычисляют вектор воздействия второй плоскости (154) коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций;
выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик (W1’) на первую плоскость (152) коррекции и устанавливают второй балансировочный грузик (W2) на вторую плоскость (154) коррекции с использованием вычисленного вектора воздействия.
13. Способ балансировки ротора для газовой турбины, при котором:
обеспечивают ротор (100), содержащий: первый подшипник (140) и второй подшипник (142), а также множество плоскостей (150) коррекции, включающих в себя первую плоскость (152) коррекции и вторую плоскость (154) коррекции, причем имеется первый балансировочный грузик (W1), который прикрепляют на первую плоскость (152) коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием;
выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), при этом вибрации, детектируемые на первом подшипнике (140), имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике (142);
обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости (154) коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора (100), относящегося к тому же типу изделий, что и ротор (100);
устанавливают первый калибровочный грузик (М1) на вторую плоскость (154) коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика (М1), причем масса первого калибровочного грузика меньше величины вибраций первого набора измерений вибраций, деленной на модуль эталонного вектора воздействия второй плоскости (154) коррекции, при этом масса первого калибровочного грузика меньше в 2-3 раза;
выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), и удаляют первый калибровочный грузик (М1) с ротора (100);
вычисляют вектор воздействия второй плоскости (154) коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций;
выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик (W1’) на первую плоскость (152) коррекции и устанавливают второй балансировочный грузик (W2) на вторую плоскость (154) коррекции с использованием вычисленного вектора воздействия.
14. Способ балансировки ротора для газовой турбины, при котором:
обеспечивают ротор (100), содержащий: первый подшипник (140) и второй подшипник (142), а также множество плоскостей (150) коррекции, включающих в себя первую плоскость (152) коррекции и вторую плоскость (154) коррекции, причем имеется первый балансировочный грузик (W1), который прикрепляют на первую плоскость (152) коррекции и оставляют прикрепленным для всех следующих прогонов с воздействием;
выполняют первый прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают первый набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), при этом вибрации, детектируемые на первом подшипнике (140), имеют меньшую величину, чем вибрации, детектируемые на втором подшипнике (142);
обеспечивают набор данных, включающий эталонный вектор воздействия второй плоскости (154) коррекции, причем эталонный вектор воздействия является вектором воздействия эталонного ротора (100), относящегося к тому же типу изделий, что и ротор (100);
устанавливают первый калибровочный грузик (М1) на вторую плоскость (154) коррекции с использованием эталонного вектора воздействия второй плоскости коррекции для определения массы и углового положения первого калибровочного грузика (М1), причем масса первого калибровочного грузика находится между 20 граммами и 45 граммами;
выполняют второй прогон с воздействием посредством этапов, на которых: приводят во вращение ротор (100) с заданной балансировочной частотой вращения и записывают второй набор измерений вибраций на первом подшипнике (140) и втором подшипнике (142), и удаляют первый калибровочный грузик (М1) с ротора (100);
вычисляют вектор воздействия второй плоскости (154) коррекции с использованием первого набора измерений вибраций и второго набора измерений вибраций;
выполняют балансировку ротора посредством этапов, на которых: устанавливают конечный балансировочный грузик (W1’) на первую плоскость (152) коррекции и устанавливают второй балансировочный грузик (W2) на вторую плоскость (154) коррекции с использованием вычисленного вектора воздействия.
15. Компьютерно-читаемый носитель данных, содержащий команды для выполнения способа по любому из пп. 1-14.
16. Компьютерно-читаемый носитель данных по п. 15, выполненный с возможностью выдачи обрабатывающему блоку команды на вычисление массы и углового положения первого калибровочного грузика (М1) с использованием эталонного вектора воздействия второй плоскости (154) коррекции и вычисление вектора воздействия второй плоскости (154) коррекции.
17. Балансировочная машина (200), содержащая компьютерно-читаемый носитель данных по п. 15 или 16, причем балансировочная машина (200) содержит первое основание (212), выполненное с возможностью принятия первого подшипника, и второе основание (214), выполненное с возможностью принятия второго подшипника.
| Учебное пособие по балансировке роторов "Texas A&M Turbomachinery Laboratory projects", Turbomachinery International, Ray Kelm, опубл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| US 20150128698 A1, 14.05.2015 | |||
| СПОСОБ БАЛАНСИРОВКИ ВАЛА ГИБКОГО РОТОРА | 2012 |
|
RU2492364C1 |
| Способ динамического уравновешивания роторов турбомашин со сменными лопатками | 1956 |
|
SU107708A1 |

