Изобретение относится к средствам техники безопасности на железнодорожном транспорте, а именно к предупреждающим или подобным предохранительным устройствам, устанавливаемым вдоль маршрута следования подвижного состава и обнаруживающим движущийся подвижный состав.
При проведении на железнодорожном транспорте ремонтных работ важной задачей является своевременное предупреждение участников ремонтных работ, то есть ремонтной бригады, о приближении подвижного состава к месту проведения работ. Предупреждение может быть правильным и своевременным только при наличии информации о подвижном составе, находящимся вблизи места проведения ремонтных работ и приближающийся к этому месту. Поэтому актуальной является задача установки вблизи границ места проведения ремонтных работ аппаратуры, выполняющей следующие задачи:
– определение момента прохождения подвижным составом контрольной полосы (то есть, установленной границы, начиная с которой необходимо готовить предупреждающие сообщения для ремонтной бригады);
– определение направления движения подвижного состава (приближается он к месту проведения ремонтных работ или удаляется);
– определение скорости движения подвижного состава;
– обеспечение возможности передачи всех этих сведений на диспетчерский пункт для организации предупреждения членов ремонтной бригады.
Поскольку прохождение контрольной полосы подвижным составом происходит нерегулярно, добавляется задача самоконтроля аппаратуры и исполнение следующих функций в те промежутки времени, когда вблизи места проведения ремонтных работ нет подвижного состава: передача (с требуемыми интервалами) контрольного сообщения о готовности аппаратуры к появлению очередного подвижного состава или о необходимости проведения регулировки аппаратуры.
Как правило, указанная выше аппаратура представляет собой группу устройств, образующих комплект. Такие комплекты устройств рассмотрены, например, в следующих патентных публикациях.
Патент на полезную модель RU 137532 (опубликовано 20.02.2014). Комплект состоит из трех устройств.
Патент на изобретение RU 2569067 (опубликовано 20.11.2015). В зависимости от поставленной задачи комплект может состоять либо из трех устройств, либо только из двух.
Патент на изобретение RU 2655566 (опубликовано 28.05.2018). В данной публикации описан комплект всего из двух устройств. Использование столь малого числа устройств объясняется тем, что в данной публикации потеряно определение направления движения подвижного состава (считается, что подвижной состав движется только к месту проведения ремонтных работ).
Общим недостатком указанных технических решений является именно использование нескольких устройств в комплекте. Ремонтные работы имеют временный характер. Перед их началом надо установить такой комплект, а по окончании снова сворачивать. Персоналу ремонтной бригады было бы намного удобнее при сокращении количества устройств в комплекте, которые требуют специальной установки вблизи места проведения ремонтных работ на железной дороге. Предпочтительнее было бы сведение всего комплекта к одному приемопередающему устройству для обнаружения подвижного состава. Однако, до настоящего времени такого устройства не существовало.
Наиболее близким по технической сущности к заявляемому является комплект из системного блока (СБ) с радиопередатчиком и не менее двух ультразвуковых датчиков (ДОП) обнаружения подвижного состава, описанный в патенте на изобретение RU 2606755 (опубликовано 19.12.2016).
В состав СБ входит аккумуляторная батарея, а питание ДОП осуществляется по кабелям, соединяющих оба ДОП с СБ. В состав СБ входит также управляющий контроллер, соединенный с радиомодемом. Включение и выключение комплекта осуществляется с помощью ключа-замка, подключаемого к СБ и постоянно находящегося в распоряжении старшего сигналиста. Нормальная работа каждого из ДОП обеспечивается при их строго вертикальном положении, которое контролируется с помощью датчиков угла наклона (угол наклона или величина сдвига относительно установленного положения должны соответствовать допустимому). Включение светового индикатора состояния на СБ (непрерывным зеленым светом) указывает на правильную работу комплекта.
Первый и второй ДОП расположены на расстоянии около 10 м друг от друга. Каждый ДОП содержит ультразвуковой передатчик и приемник. Один раз в течение промежутка времени от трёх до пяти секунд каждый ДОП излучает ультразвуковые сигналы и принимает отраженные сигналы. Обнаружение подвижного состава осуществляется в результате приема сигнала, переданного ультразвуковым передатчиком и отраженного от корпуса подвижного состава. Если вначале обнаружение подвижного состава осуществляется ДОП, более далеким от места проведения ремонтных работ, а потом уже более близким, то подвижный состав движется к месту проведения ремонтных работ. Частное от деления расстояния между двумя ДОП на промежуток времени между обнаружением подвижного состава более дальним и более близким к месту проведения ремонтных работ ДОП указывает на скорость приближения подвижного состава к месту проведения ремонтных работ.
То есть быстродействие известного технического решения ограничено промежутком времени от трех до пяти секунд.
Техническая проблема, решаемая изобретением, заключается в создании устройства для обнаружения подвижного состава, обеспечивающего более простое его развертывание и сворачивание на месте проведения ремонтных работ и обладающего большим быстродействием.
Технический результат, достигаемый предложенным изобретением и позволяющий решить техническую проблему, состоит в сокращения количества устройств до одного и в повышении быстродействия устройства за счет расположения двух индукционных датчиков на расстоянии 20 см друг от друга в едином корпусе.
Технический результат достигается приемопередающим устройством для обнаружения подвижного состава, содержащим управляющий контроллер, первый вывод которого соединен с выводом радиомодема, два детектора приближения подвижного состава, выходы которых соединены соответственно с первым и вторым входом управляющего контроллера, и датчик угла наклона, которое, согласно изобретению, снабжено контрольным процессором, вывод которого соединен с вторым выводом управляющего контроллера, а входы детекторов приближения подвижного состава соединены соответственно с первым и вторым выходами контрольного процессора, выход управляющего контроллера соединен с входом индикатора состояния, третий вход управляющего контроллера соединен с выходом датчика угла наклона, а четвертый вход управляющего контроллера выполнен с возможностью подключения ключа-замка, при этом управляющий контроллер, радиомодем, два указанных детектора, контрольный процессор, индикатор состояния и датчик угла наклона соединены с аккумуляторной батареей.
При этом детекторы приближения подвижного состава предпочтительно представляют собой индуктивные детекторы.
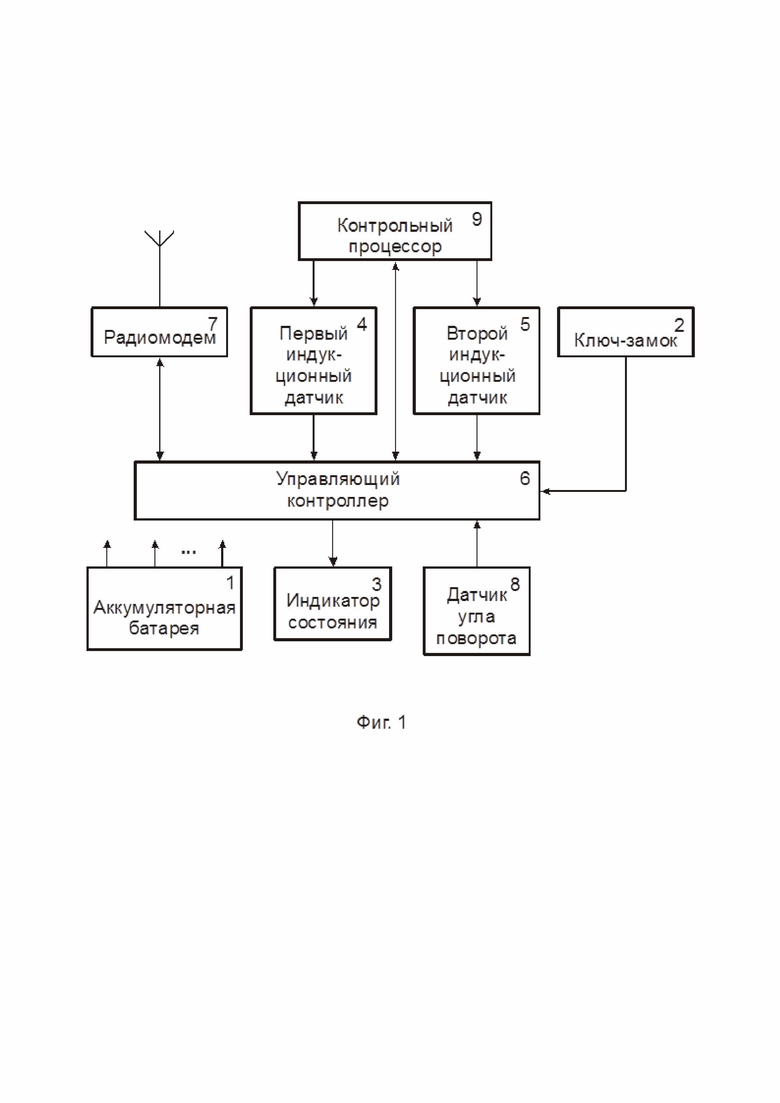
На чертеже показана блок-схема предложенного приемопередающего устройства для обнаружения подвижного состава.
На чертеже использованы следующие обозначения: 1 – аккумуляторная батарея, 2 – ключ-замок, 3 – индикатор состояния, 4 – первый детектор приближения подвижного состава, 5 – второй детектор приближения подвижного состава, 6 – управляющий контроллер, 7 – радиомодем, 8 – датчик угла наклона, 9 – контрольный процессор.
Устройство для обнаружения подвижного состава (условное обозначение ДОП.РСДОП-М) представляет собой автономное устройство, работающее в составе системы ограждения места работ по текущему содержанию железнодорожного пути с оповещением работающих на железнодорожных путях о приближении железнодорожного подвижного состава.
Устройство для обнаружения подвижного состава содержит управляющий контроллер 6, первый вывод которого соединен с выводом радиомодема 7, который выполнен с возможностью связи по радиоэфиру с сигнализатором системы оповещения. Выходы двух детекторов 4 и 5 приближения подвижного состава соединены соответственно с первым и вторым входами управляющего контроллера 6. Входы двух детекторов 4 и 5 соединены соответственно с первым и вторым выходами контрольного процессора 9, вывод которого соединен со вторым выводом управляющего контроллера 6. Выход управляющего контроллера 6 соединен с входом индикатора 3 состояния, третий вход управляющего контроллера 6 соединен с выходом датчика 8 наклона, а четвертый вход управляющего контроллера 6 выполнен с возможностью соединения с ключом-замком 2.
Все составные части устройства – управляющий контроллер 6, радиомодем 7, детекторы 4 и 5 приближения подвижного состава, контрольный процессор 9, индикатор 3 состояния и датчик 8 угла поворота – соединены с аккумуляторной батареей.
Датчик 8 угла наклона фиксирует рабочее положение приемопередающего устройства для обнаружения подвижного состава и выдает сигналы изменения положения (сдвига) и/или наклона приемопередающего устройства свыше допустимого. Такого рода датчики 8 угла наклона (называемые также датчиками положения) как ртутные, так и шариковые, широко известны в технической литературе и доступны в торговой сети. См., например, https://www.qrz.ru/schemes/contribute/security/rtutnyj_datcik_polozenia_rdp.html.
Функционирование предложенного приемопередающего устройства для обнаружения подвижного состава происходит следующим образом.
В состав приемопередающего устройства входит аккумуляторная батарея 1. Заряд аккумуляторной батареи 1 должен обеспечивать питание для всех составных частей приемопередающего устройства. Перед началом работы необходимо проверить состояние аккумуляторной батареи 1. Работа приемопередающего устройства начинается при воздействии на него специального ключа-замка 2, открывающего возможность доступа к настройкам приемопередающего устройства. Настройки необходимо проводить при отсутствии возможности появления подвижного состава в рабочей зоне приемопередающего устройства. После окончания настроек должен включиться зеленым цветом индикатор 3 состояния. После этого ключ-замок 2 должен быть удален, чтобы исключить несанкционированное изменение настраиваемых параметров приемопередающего устройства. Свободный доступ к удаленному ключу-замку 2 должен быть исключен. Ключ-замок 2 должен храниться у доверенного лица, которое при необходимости может заново правильно установить и наладить приемопередающее устройство.
Элементами, непосредственно реагирующими на проходящий подвижной состав, являются детекторы 4 и 5, которые могут быть оптическими, микроволновыми, доплеровскими микроволновыми, акустическими и др.
Далее работа устройства описана на примере индуктивных датчиков (далее по тексту – индуктивные датчики 4 и 5).
Функционирование индуктивных датчиков 4 и 5 основано на явлении увеличения индуктивности катушки с электрическим проводом при приближении к катушке металлического объекта, через который замыкаются линии магнитного поля катушки. Для предложенного приемопередающего устройства таким металлическим объектом является реборда колеса подвижного состава.
Индуктивные детекторы 4 и 5 представляют собой резонансные контуры с большой печатной индуктивностью, расположенные в горизонтальной плоскости так, чтобы при установке приемопередающего устройства нижняя часть реборды проходила через центр резонансного контура с большой печатной индуктивностью. Контур индуктивного детектора 4 или 5 имеет резонансную частоту порядка 4 МГц и подключен к преобразователю, с высокой частотой выполняющему измерения индуктивности L и активного сопротивления Rp контура индукционного датчика. При использовании в качестве такого преобразователя широко известной и доступной в торговой сети микросхемы LDC1101 (разработки фирмы Texas Instruments) обеспечивается частота измерения не менее 5000 раз в секунду. Характеристики микросхемы LDC1101 приведены здесь: https://www.compel.ru/series/TI/LDC1101.
При появлении реборды над индуктивным детектором 4 или 5 добротность контура датчика падает, а отношение Rp/L резко возрастает (примерно в 300 раз).
Измеренные значения отношения Rp/L поступают на управляющий контроллер 6. Если поступившее значение отношения превышает установленный порог, то управляющий контроллер 6 запоминает величину поступившего значения отношения и момент tпр1 поступления этого значения отношения Rp/L от первого или второго индуктивных детекторов 4 или 5. Эта запомненная величина в дальнейшем сравнивается со значениями отношения Rp/L, поступающими от того же индуктивного детектора 4 или 5. Сначала эти отношения должны возрастать, а после максимума (соответствующего прохождению реборды непосредственно над индуктивным датчиком 4 или 5) – снижаться. В какой-то момент снижаемый уровень отношения становится ниже установленного порога. Тогда в управляющем контроллера 6 фиксируется продолжительность времени ΔT1 превышения установленного порога в поступающих с соответствующего индуктивного детектора 4 или 5 значениях отношения.
В управляющем контроллере 6 вычисляется время t1, принимаемое в качестве момента прохождения реборды колеса подвижного состава над соответствующим индуктивным детектором 4 или 5, по формуле
t1 = tпр1 + ΔT1/2 (1)
Те же вычисления управляющий контроллер 6 повторяет относительно другого индуктивного детектора 5 или 4, получая значение t2 по формуле, аналогичной формуле (1). Направление движения подвижного состава определяется как направление от индуктивного детектора 4 или 5, для которого значение, рассчитанное по формуле (1), меньше, к другому индуктивному детектору 5 или 4, для которого это значение больше.
Расстояние M между первым и вторым индуктивными детекторами 4 и 5 определяется конструкцией приемопередающего устройства (например, 200 мм). Тогда скорость V движения подвижного состава будет рассчитываться по формуле:
V = M/mod (t2 – t1) (2)
Параметры направления, скорости и момента прохождения подвижным составом над приемопередающим устройством управляющий контроллер 6 включает в пакеты данных о наличии или отсутствии прохождения подвижного состава, которые он готовит к передаче на радиомодем 7. Некоторые пакеты данных могут быть явно неправильными. Это вызвано тем, что приемопередающее устройство в течение продолжительного времени должно находиться вне какого-либо защитного приспособления (на открытой площадке). Может существенно разрядиться аккумуляторная батарея 1, может произойти наклон или сдвиг положения приемопередающего устройства. При наклоне или сдвиге, превышающем допустимое значение, сигналы индуктивных детекторов 4 и 5 искажаются, и по ним нельзя будет достоверно судить о прохождении подвижного состава. Наклон или сдвиг фиксирует специальный датчик 8 угла наклона. При разрядке аккумуляторной батареи 1 свыше допустимого или при обнаружении существенного сдвига или наклона приемопередающего устройства управляющий контроллер 6 переходит в тревожный режим. При этом на индикаторе 3 состояния включается сигнал тревожного режима, например, светодиод индикатора 3 состояния переходит в режим мигания. Однако никакой информации от приемопередающего устройства при этом не передается: выдача любой информации от приемопередающего устройства происходит только после выдачи сигнализатором системы оповещения сигнала запроса и получения этого сигнала приемопередающим устройством.
Радиомодем 7 ожидает прихода радиосигнала, который был бы снабжен признаком сигнала сигнализатора системы оповещения, предназначенного для данного приемопередающего устройства. Такой поступивший сигнал передается в управляющий контроллер 6, где осуществляется его идентификация.
При идентификации этот сигнал может быть определен либо как служебный командный сигнал, либо как сигнал запроса. В управляющий контроллер 6 заложен список служебных командных сигналов и определен порядок исполнения каждого из них.
Если от радиомодема 7 на управляющий контроллер 6 поступил сигнал запроса, а приемопередающее устройство не находится в тревожном режиме, то управляющий контроллер 6 передает в радиомодем 7 сформированный пакет данных о наличии или отсутствии прохождения подвижного состава. Радиомодем 7 по радиоканалу связи передает этот пакет на сигнализатор системы оповещения. Оператор сигнализатора системы оповещения должен сделать правильные выводы о прохождении подвижного состава и принять, при необходимости, соответствующие меры по оповещению.
Существует возможность, что от радиомодема 7 на управляющий контроллер 6 поступает сигнал запроса в то время, когда приемопередающее устройство находится в тревожном режиме. Показания индукционных датчиков 4 и 5 в тревожном режиме нельзя считать достоверными. Поэтому управляющий контроллер 6 через радиомодем 7 передает по радиоканалу на сигнализатор системы оповещения специальный тревожный код. Оператор сигнализатора системы оповещения, приняв такой сигнал, должен сделать правильный вывод о том, что приемопередающее устройство перешло в тревожный режим. Необходимо, чтобы доверенное лицо, используя на пункте установки приемопередающего устройства ключ-замок 2 (хранящийся у этого доверенного лица), заново правильно установил и наладил бы приемопередающее устройство.
Рассматривая возможные варианты поступления сигналов от радиомодема 7 на управляющий контроллер 6, можно отметить, что в принципе возможна такая ситуация, когда из радиомодема 7 на управляющий контроллер 6 поступает сигнал, который расшифровывается, как не относящийся к списку служебных командных сигналов, но и не являющийся сигналом запроса. Любой такой сигнал считается ложным, а в управляющий контроллер 6 должна быть заложена программа отработки ложного сигнала.
Одним из возможных командных сигналов, подаваемых от радиомодема 7 на управляющий контроллер 6, является команда формирования контрольного сигнала для проверки работоспособности. При отработке этой команды управляющий контроллер 6 подает на контрольный процессор 9 сигнал запуска. После запуска контрольный процессор 9 выдает сигналы формирования строго определенных выходных пакетов сигналов для индуктивных детекторов 4 и 5, а также код пакета для сравнения, передаваемый на управляющий контроллер 6. Пакеты выходных сигналов, выдаваемые индуктивными детекторами 4 и 5, обозначают строго определенное прохождение подвижного состава.
Именно это прохождение подвижного состава должно быть отмечено в пакете сигналов, который формирует управляющий контроллер 6 для передачи в радиомодем 7. О работоспособности приемопередающего устройства должно свидетельствовать полное совпадение кода этого пакета сигналов с кодом пакета для сравнения, который передается на управляющий контроллер 6 с контрольного процессора 9. Индикатор 3 состояния должен как-то отметить успешную проверку работоспособности. Например, три раза мигнуть, а затем снова перейти к непрерывному свечению зеленым светом.
После успешной проверки работоспособности управляющий контроллер 6 должен сразу же передать через радиомодем 7 на сигнализатор системы оповещения служебный пакет сигналов. Этот пакет должен подтвердить работоспособность приемопередающего устройства, а также сообщить на сигнализатор системы оповещения служебные данные, к которым могут относиться параметры аккумуляторной батареи 1 (не слишком ли она разрядилась) и показания датчика 8 угла наклона (осталось ли неизменным рабочее положение устройства для обнаружения подвижного состава).
Таким образом, функционирование предложенного приемопередающего устройства полностью рассмотрено.
Изобретение относится к средствам обнаружения подвижного состава. Устройство содержит управляющий контроллер (6), первый вывод которого соединен с выводом радиомодема (7), который выполнен с возможностью связи по радиоэфиру с сигнализатором системы оповещения. Выходы двух детекторов (4) и (5) приближения подвижного состава соединены соответственно с первым и вторым входами управляющего контроллера (6), а входы детекторов (4) и (5) соединены соответственно с первым и вторым выходами контрольного процессора (9), вывод которого соединен со вторым выводом управляющего контроллера (6). Выход управляющего контроллера (6) соединен с входом индикатора (3) состояния, третий вход управляющего контроллера (6) соединен с выходом датчика (8) поворота, четвертый вход управляющего контроллера (6) выполнен с возможностью соединения с ключом-замком (2). Все составные части устройства: управляющий контроллер (6), радиомодем (7), детекторы (4) и (5) приближения подвижного состава, контрольный процессор (9), индикатор (3) состояния и датчик (8) угла поворота – соединены с аккумуляторной батареей. Достигается повышение оперативности развертывания и сворачивания на месте проведения путевых работ. 1 ил.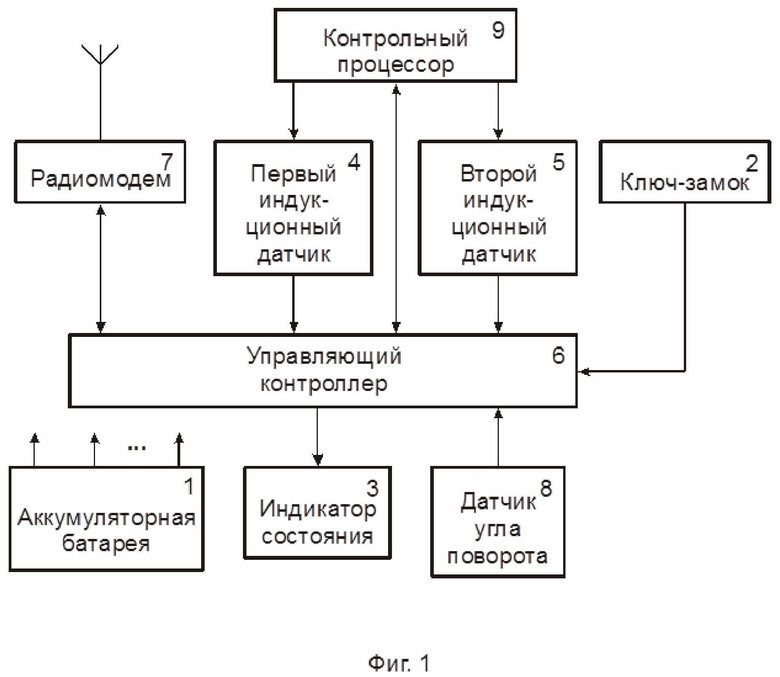
1. Устройство для обнаружения подвижного состава, содержащее управляющий контроллер, первый вывод которого соединен с выводом радиомодема, два детектора приближения подвижного состава, выходы которых соединены соответственно с первым и вторым входом управляющего контроллера, и датчик угла поворота, отличающееся тем, что снабжено контрольным процессором, вывод которого соединен с вторым выводом управляющего контроллера, а входы детекторов приближения подвижного состава соединены соответственно с первым и вторым выходами контрольного процессора, выход управляющего контроллера соединен с входом индикатора состояния, третий вход управляющего контроллера соединен с выходом датчика угла поворота, а четвертый вход управляющего контроллера выполнен с возможностью подключения ключа-замка, при этом управляющий контроллер, радиомодем, два указанных детектора, контрольный процессор, индикатор состояния и датчик угла поворота соединены с аккумуляторной батареей.
2. Устройство по п. 1, отличающееся тем, что детекторы приближения подвижного состава представляют собой индуктивные датчики приближения.
| 0 |
|
SU147952A1 | |
| СПОСОБ ОПОВЕЩЕНИЯ РАБОТАЮЩИХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА ПРИ ВЫПОЛНЕНИИ РАБОТ НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2606755C1 |
| Устройство для работы с асфальтовыми массами | 1960 |
|
SU137532A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2569067C2 |
| US 6323785 B1, 27.11.2001. | |||

