Изобретение касается пульта управления для роботизированной хирургической системы, которая включает в себя приводимый вручную управляющий элемент, который включает в себя накладки для приема соответственно пальца обслуживающего персонала, в частности, для приема большого пальца руки и среднего пальца обслуживающего персонала. Далее, пульт управления имеет переходное устройство для закрепления на удерживающем блоке, причем пульт управления, когда он закреплен посредством этого переходного устройства на удерживающем блоке, имеет возможность вращения относительно переходного устройств вокруг первой, второй и третьей оси вращения, причем эти три оси вращения ориентированы перпендикулярно друг другу.
В минимально-инвазивной хирургии все более применяются так называемые телеманипуляторные системы, которые также называются роботоассистирующими системами или обобщенно устройствами для роботизированной хирургии. С помощью устройства для роботизированной хирургии хирургические инструменты на основании ввода данных управляются в своем положении или ориентации. Кроме того, хирургические инструменты присоединяются к телеманипуляторной системе механически, электрически и/или оптически, чтобы обеспечить возможность реализации активного позиционирования и ориентации хирургического инструмента, а также желаемого манипулирования хирургического инструмента. Для этого хирургические инструменты, которые наряду с инструментами с концевыми эффекторами включают в себя также эндоскопы и предназначенные для воздействия медицинские приборы, имеют переходное устройство сопряжения, которое может быть выполнено как блок сопряжения, а также называется как стерильный блок. Кроме того, устройство для роботизированной хирургии имеет, по меньшей мере, одну манипулирующую руку, на проксимальном конце которой предусмотрен блок сопряжения, с которым имеет возможность соединения стерильный блок, чтобы обеспечить механическое, электрическое и/или оптическое сопряжение (стыковку) между манипулирующей рукой и хирургическим инструментом.
Для управления телеманипуляторной системой используются пульты управления, которые расположены на центральном управляющем блоке, и которые должны предоставлять возможность хирургу максимально точное управление закрепленными на руке робота хирургическими инструментами.
У известных пультов управления проблематичным, в частности, является то, что они часто не предоставляют возможность интуитивного перемещения хирургических инструментов, в частности перемещение происходит не так, как если бы хирург фактически непосредственно держал бы хирургический инструмент в своей руке. Причиной для этого, как правило, является то, что отдельные оси перемещения и вращения пультов управления отличаются от таковых у человеческой руки, так что происходит отличающееся перемещение от руки. Как следствие, это имеет то, что хирург должен привыкнуть соответственно к устройству ввода, и без достаточной тренировки не может гарантироваться необходимое точное управление хирургическими инструментами.
Задачей изобретения является предоставление пульта управления для роботизированной хирургической системы, с помощью которого роботизированная хирургическая система может управляться по возможности более точно.
Эта задача решается посредством пульта управления с признаками пункта 1 формулы изобретения. Предпочтительные усовершенствования указаны в зависимых пунктах формулы.
Согласно изобретению, пульт управления выполнен таким образом, что три оси вращения, вокруг которых управляющий элемент имеет возможность вращения, пересекаются в общей точке пересечения.
При этом, эта точка пересечения расположена, в частности, внутри управляющего элемента, причем точка пересечения расположена, в частности, между обеими накладками, через которые вводятся пальцы. В частности, точка пересечения расположена по центру между обеими накладками и предпочтительно таким образом, что она совпадает со средней точкой управляющего элемента.
Обнаружено, что посредством расположения осей вращения таким образом, что они пересекаются в одной общей точке, и в частности, что она расположена между накладками и тем самым между пальцами хирурга, получается простое, особенно интуитивное управление, поскольку осуществляемый таким образом захват и регистрируемые пультом управления перемещения интуитивно соответствуют тем, как если бы хирург своими обоими пальцами, которые введены через накладки, непосредственно удерживал бы хирургический инструмент.
Под накладками понимаются, в частности, любые типы петель или других элементов, через которые могут вводиться пальцы. В частности, управляющий элемент может выполняться таким образом, что через одну накладку введен большой палец хирурга, а через другую накладку - средний палец. В частности, накладки выполняются из гибкого элемента, например, из ленты.
Кроме того, расположение указанных трех осей вращения такое, что они пересекаются в одной точке и она лежит внутри управляющего элемента, имеет преимущество, что вследствие этого подлежащий компенсации момент инерции масс и паразитные усилия минимизируются, вследствие чего достигается еще более простое интуитивное управление.
Пульт управления включает в себя, в частности, базовый элемент, который включает в себя переходное устройство, таким образом, что пульт управления через этот базовый элемент выполнен с возможностью закрепления на удерживающем блоке, причем этот базовый элемент тогда, в частности, расположен без возможности вращения на удерживающем блоке. В случае удерживающего блока речь может идти, в частности, о консоли штатива, причем эта консоль, в свою очередь, может иметь возможность линейного перемещения, в частности, в трех направлениях и дополнительно может иметь возможность вращения вокруг шарнира в трех направлениях. Вследствие этого достигается то, что возможно ориентирование в возможно любом положении в пределах этого пространства.
На базовом элементе шарнирно установлен с возможностью вращения, в частности, один поворотный блок, причем эта установка осуществляется таким образом, что поворотный блок установлен шарнирно относительно базового элемента с возможностью вращения вокруг первой оси вращения. В свою очередь, на поворотном блоке закреплен корпус с возможностью вращения вокруг второй оси относительно поворотного блока, причем в таком случае на этом корпусе, в свою очередь, закреплен управляющий элемент с возможностью вращения вокруг третьей оси вращения. Посредством этой цепочки из вращательных креплений достигается то, что управляющий элемент, который хирург держит в своей руке для манипуляции, имеет возможность вращения вокруг всех трех осей вращения относительно переходного устройства.
Перемещение, которое хирург выполняет на управляющем элементе, определяется, в частности, посредством датчиков, причем роботизированная хирургическая система затем настраивается таким образом, что удерживаемые ей хирургические инструменты выполняют определенные заранее перемещения.
В одном особенно предпочтительном варианте осуществления изобретения управляющий элемент выполнен дискообразным, причем под дискообразным понимается, в частности, приблизительно цилиндрический элемент, диаметр которого больше его толщины.
Обе накладки расположены, в частности, на обеих сторонах шайбы противоположно друг другу.
Такой дискообразный элемент может размещаться в пределах руки хирурга особенно простым способом и эргономично выгодно, причем, в частности, внутренняя поверхность руки лежит на периферийной поверхности управляющего элемента.
Корпус имеет, в частности, два кольца, между которыми расположен дискообразный управляющий элемент, причем управляющий элемент посредством шарнира, в частности тонкого радиального подшипника, закреплен на корпусе, так что управляющий элемент относительно корпуса может вращаться вокруг третьей оси. В частности, эта установка осуществляется таким образом, что возможно вращение на 360°.
Корпус, в свою очередь, посредством другого подшипника, в частности шарикоподшипника, предпочтительно двух тонких радиальных подшипников, закреплен с возможностью вращения на поворотном блоке. Таким образом, также вследствие этого достигается вращение на 360° относительно поворотного блока, что во взаимосвязи с установкой (опиранием) управляющего элемента позволяет то, что управляющий элемент имеет возможность вращения относительно поворотного блока и, следовательно, также относительно переходного устройства на 360° как вокруг второй, так и вокруг третьей оси вращения.
В свою очередь, поворотный блок посредством, по меньшей мере, одного шарикоподшипника, предпочтительно двух тонких радиальных подшипников, закреплен с возможностью вращения на базовом элементе.
Далее является преимуществом, если пульт управления включает в себя первый исполнительный элемент для вращения поворотного блока вокруг первой оси, второй исполнительный элемент для вращения корпуса вокруг второй оси и/или третий исполнительный элемент для вращения управляющего элемента вокруг третьей оси вращения. С одной стороны, посредством этих исполнительных элементом может осуществляться ориентирование управляющего элемента в предварительно установленном нулевом положении, если управляющий элемент ранее был перемещен из этого нулевого положения. С другой стороны, посредством этих исполнительных элементов может осуществляться силовая обратная связь с установочным элементом, так называемая Force Feedback. Для этого, в частности, посредством датчиков, определяются воздействующие на хирургические инструменты во время операции силы и/или вращающие моменты и посредством исполнительных элементов передаются обратно на управляющий элемент, так что хирург может испытывать сопротивления и усилия хирургических инструментов и, следовательно, испытывать чувство, как если бы он непосредственно держал хирургические инструменты.
В случае исполнительных элементов речь идет, в частности, о моторах, предпочтительно электромоторах. Вследствие этого, становится возможной простая конструкция и точная настройка.
Первый исполнительный элемент расположен, в частности, на базовом элементе и предпочтительно посредством зубчато-ременной передачи сопряжен с поворотным блоком, так что базовый элемент может вращаться вокруг первой оси вращения.
Второй исполнительный элемент расположен, в частности, на поворотном блоке и предпочтительно посредством другой зубчато-ременной передачи сопряжен с корпусом, так что корпус посредством второго исполнительного элемента может вращаться вокруг второй оси вращения относительно поворотного блока.
Третий исполнительный элемент, напротив, закреплен, в частности, не на корпусе, а на управляющем элементе, и соответственно вращается вместе с этим управляющим элементом. Этим способом достигается то, что управляющий элемент относительно корпуса может произвольно вращаться на 360°.
Третий исполнительный элемент соединен с корпусом, в частности, посредством шестерни и корончатого зубчатого колеса, так что предоставлена возможность вращения относительно корпуса вокруг третьей оси вращения.
Далее, пульт управления имеет, в частности, первый датчик для определения поворотного положения вокруг первой оси вращения, второй датчик для определения поворотного положения вокруг второй оси и/или третий датчик для определения поворотного положения вокруг третьей оси, причем полученная вследствие этого информация используется, в частности, для настраивания роботизированной системы. В частности, датчики соответственно также могут быть интегрированы в соответствующие исполнительные элементы, соответственно, используются для этого и без того предусмотренные в исполнительных элементах датчики.
Далее возможной альтернативой является то, что используется датчик для определения поворотного положения вокруг нескольких осей.
Пульт управления выполнен, в частности, таки образом, что управляющий элемент имеет возможность вращения на 360° как вокруг второй, так и вокруг третьей оси вращения. Вследствие этого достигается то, что обеспечивается максимально большой диапазон регулирования.
В одном предпочтительном варианте осуществления изобретения управляющий элемент имеет клавишу, посредством которой обслуживающий персонал может регулировать другие функции роботизированной хирургической системы. Этот управляющий элемент может быть выполнен, в частности, как сдвижная клавиша и расположен, в частности, на периферической поверхности дискообразного управляющего элемента.
В частности, сдвиговая клавиша посредством упругого элемента, например, пружины сжатия, предварительно напряжена в заранее установленном положении и может перемещаться обслуживающим персоналом против упругой (пружинной) силы для срабатывания микропереключателя. Посредством возвращающей силы указанная клавиша после отпускания перемещается снова в свое исходное положение.
Альтернативно, для регулирования вместо клавиши может предусматриваться, например, также переключатель или ручка.
Клавиша, переключатель или ручка могут быть выполнены с возможностью вращения, предпочтительно, вместе с расположенными на обеих сторонах основного тела управляющего элемента накладками, так что хирург может доставать и эксплуатировать ее/его удобно и в любое время независимо от положения накладок.
В случае одного особенно предпочтительного варианта осуществления обе накладки на дискообразном основном элементе управляющего элемента закреплены таким образом, что посредством них выполняется тип пинцетного захвата, при котором хирург имеет возможность разводить и сводить свои оба направленных через накладки пальца, и это перемещение регистрируется посредством соответствующих датчиков и учитывается при настраивании хирургического инструмента роботизированной хирургической системы.
Для этого, обе накладки выполнены с возможностью поворота прочь друг от друга, в частности, вокруг определенных заранее точек вращения на предопределенный угол, причем обе накладки, в частности, сопряжены таким образом, что они обе относительно нулевого положения всегда раскрыты на одинаковый угол. Это нулевое положение, в частности, является тем положением, при котором обе поверхности дискообразного управляющего элемента, на котором закреплены накладки, ориентированы параллельно друг другу.
Другие признаки и преимущества изобретения вытекают из нижеследующего описания, которое более подробно поясняет изобретение на основании примеров осуществления в соединении с прилагаемыми чертежами, которые показывают:
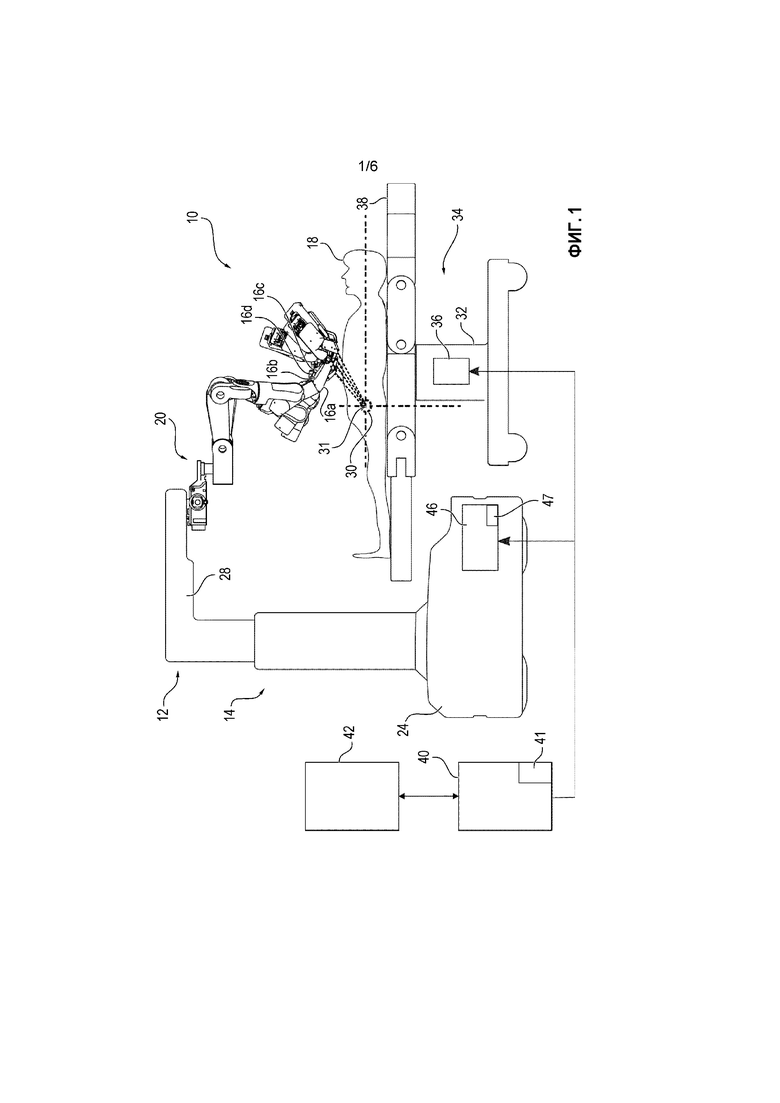
Фиг.1 - схематический вид сбоку системы для роботизированной хирургии с манипулятором, который имеет четыре манипулирующих рук, с которой имеет возможность соединения соответственно инструментальный блок.
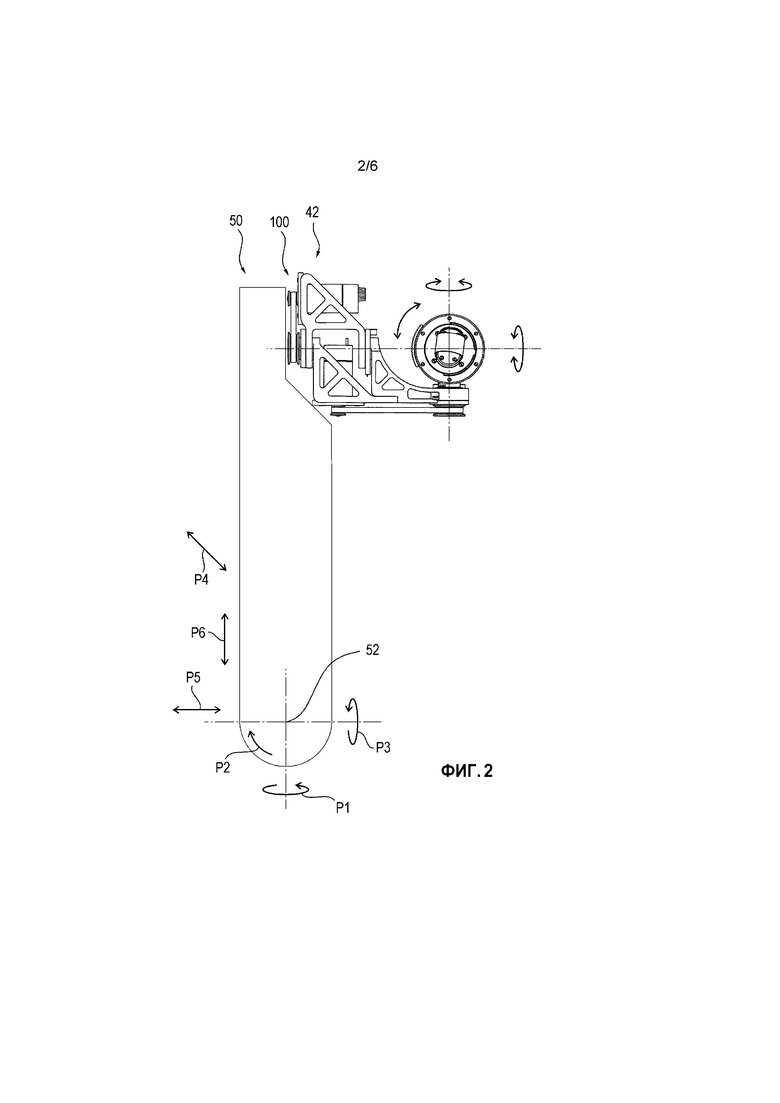
Фиг.2 - схематическое изображение пульта управления для управления манипулятором согласно фиг.2, а также удерживающий блок, на котором закреплен пульт управления.
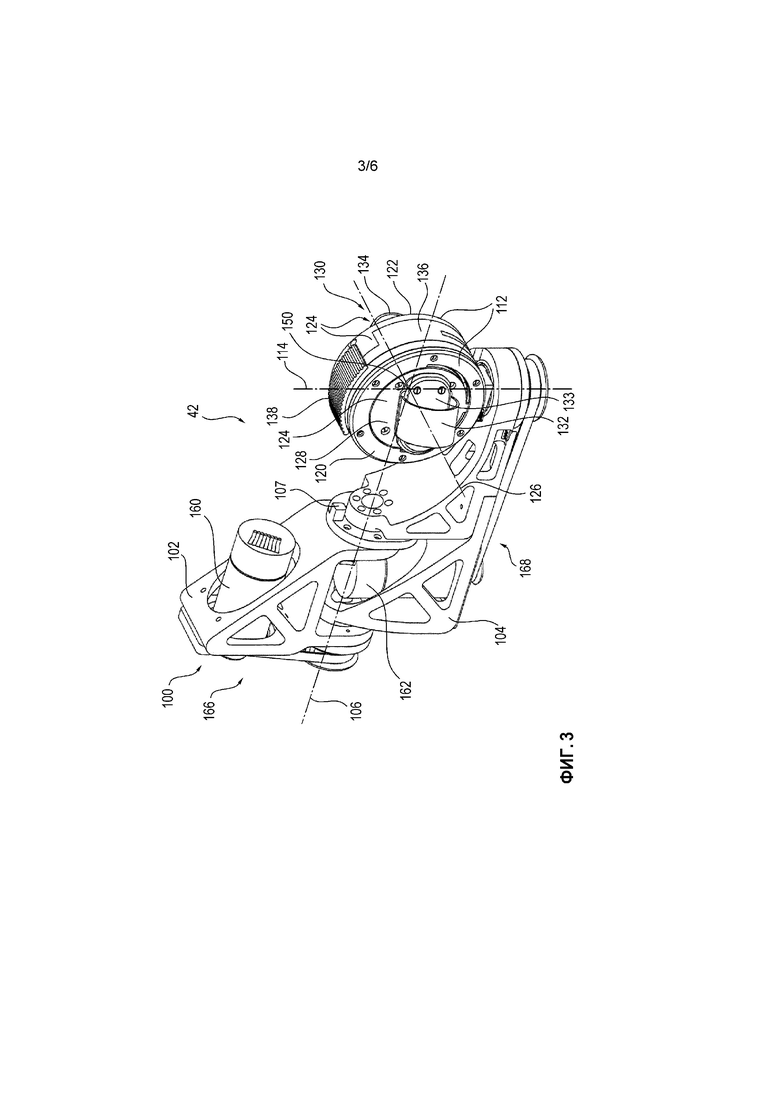
Фиг.3 - схематическое перспективное изображение пульта управления согласно фиг.2.
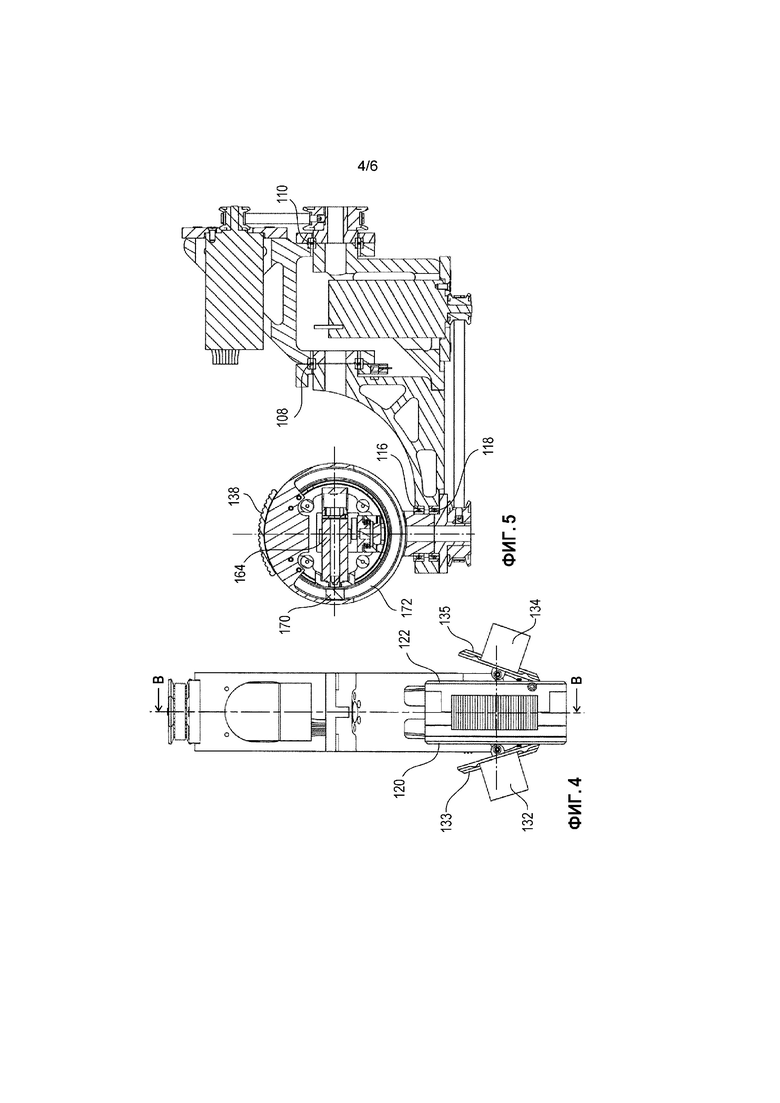
Фиг.4 - вид сверху на пульт управления согласно фиг.2 и 3 при раскрытом пинцетном захвате.
Фиг.5 - изображение сечения через пульт управления согласно фиг.2-4.
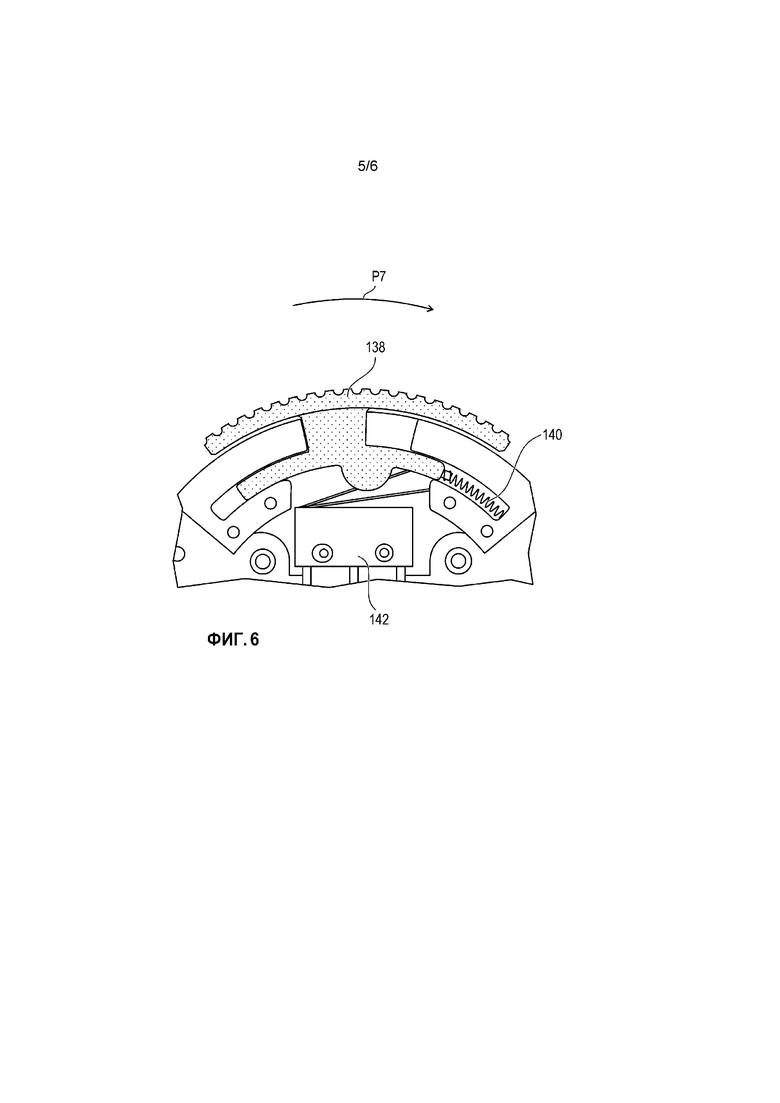
Фиг.6 - фрагмент изображения сечения управляющего элемента пульта управления согласно фиг.2-5.
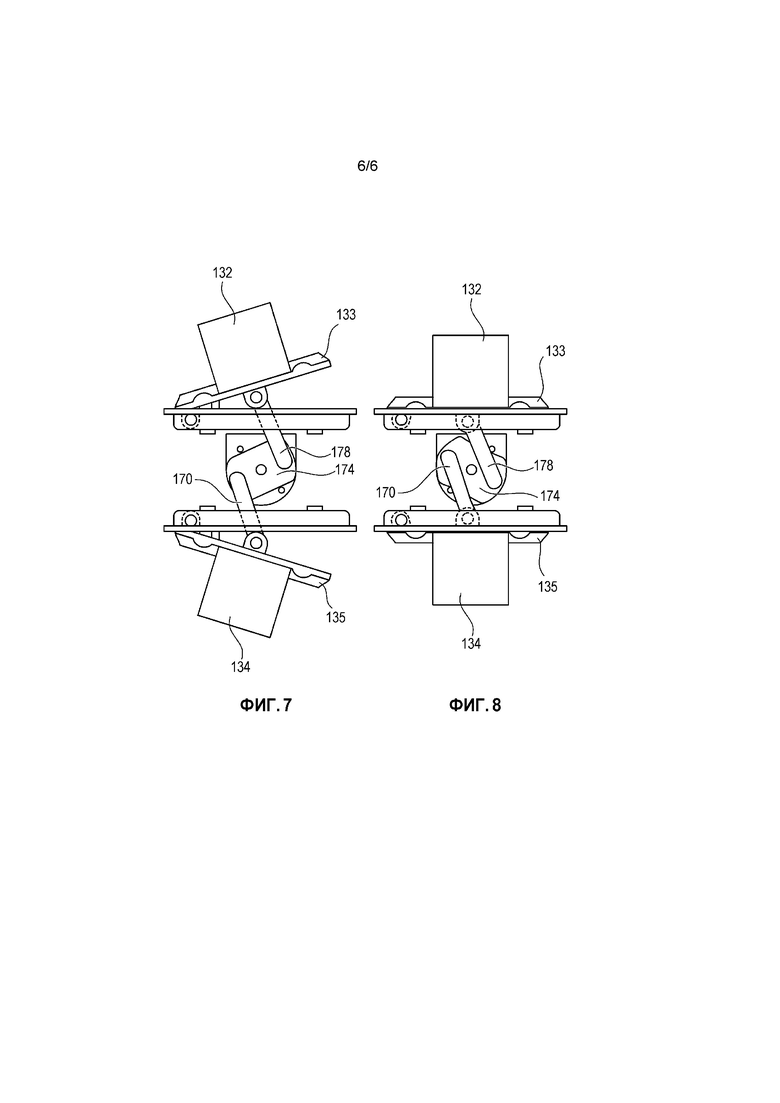
Фиг.7 и 8 - соответственно схематическое изображение фрагмента управляющего элемента.
Фиг.1 показывает схематический вид сбоку системы 10 для роботизированной хирургии с манипулятором 12, который имеет штатив 14 и четыре манипулирующие руки 16а - 16d. Манипулятор 12 в целом называется также как устройство для роботизированной хирургии. Система 10 служит для осуществления хирургического вмешательства в позиционированного на операционном столе 34 пациента 18. Исходя из анатомии пациента 18 и подлежащей осуществлению операции определены и сохранены предварительно настроенными координаты целевой операционной зоны 30'. Штатив 14 имеет L-образную консоль 28 штатива, на удаленном от опоры 24 штатива конце которой манипулирующие руки 16а - 16d соединены посредством головки 20 штатива.
Операционный стол 34 имеет стойку 32 операционного стола, в которой расположен управляющий блок 36 операционного стола 34 и на котором расположена включающая в себя несколько сегментов поверхность 38 для опирания пациента. Управляющий блок 36 служит для управления перемещением элементов операционного стола 34, в частности, для перестановки длины стойки 32 операционного стола и таким образом для перестановки высоты поверхности 38 для опирания пациента и для перестановки отдельных сегментов, а также наклона и крена поверхности 38 для опирания пациента. Однако, предпочтительным образом перестановка сегментов операционного стола 34 во время операционного вмешательства блокируется с помощью манипулятора 12. Далее, система 10 включает в себя управляющий блок 46 манипулятора 12, а также центральный управляющий блок 40, который через информационные шины соединен с управляющим блоком 46 манипулятора 12, управляющим блоком 36 операционного стола 34, а также управляющей консолью 42 с блоком 44 индикации. Управляющий блок 40 имеет блок 41 выдачи, а управляющий блок 46 имеет блок 47 выдачи, посредством которых соответственно могут выдаваться оптические и/или акустические сигналы.
Верхняя поверхность поверхности 38 для опирания пациента образует фронтальную плоскость, на которой дорсально лежа позиционирован пациент 18.
Фиг.2 показывает схематическое изображение пульта 42 управления, а также удерживающей консоли 50, на которой закреплен пульт 42 управления посредством переходного устройства (интерфейс) 100 пульта 42 управления.
Удерживающая консоль 50 выполнена с возможностью вращения вокруг точки 52 вращения, как обозначено стрелками Р1 - Р3, вокруг трех осей, которые являются перпендикулярными друг другу. Кроме того, удерживающая консоль 50 может линейно перемещаться в трех перпендикулярно ориентированных друг другу направлениях, как обозначено стрелками Р4 - Р6. Таким образом, пульт 42 управления может ориентироваться в эргономично выгодное положение для обслуживающего персонала.
На фиг.3 показано схематическое перспективное изображение пульта 42 управления. Фиг.4 показывает вид сверху на пульт 42 управления, а фиг.5 показывает изображение сечения через пульт 42 управления в соответствии с сечением В-В согласно фиг.4.
Пульт 42 управления включает в себя базовый элемент 102, на котором предусмотрено переходное устройство 100 и посредством которого пульт 42 управления закрепляется на удерживающей консоли 50. На базовом элементе 102 шарнирно установлен поворотный блок 104 с возможностью вращения вокруг первой оси 106 вращения. При этом, указанная (шарнирная) установка осуществляется, в частности, посредством двух тонких радиальных подшипников 108, 110.
На обращенном от базового элемента 102 конце поворотного блока 104 расположен корпус 112, который шарнирно установлен на поворотном блоке 104 с возможностью вращения вокруг второй оси 114 вращения. В свою очередь, возможность вращения достигается в результате установки корпуса посредством двух тонких радиальных подшипников 116, 118.
Корпус 112 включает в себя два кольца 120, 122, между которыми расположен дискообразный управляющей элемент 124, причем этот управляющий элемент 124 шарнирно установлен с возможностью вращения вокруг третей оси 126 вращения относительно корпуса 112 и, таким образом, относительно обоих колец 120, 122.
На обеих боковых поверхностях 128, 130 дискообразного основного тела управляющего элемента 124 расположены две накладки 132, 134, через которые обслуживающий персонал может вводить пальцы. В частности, накладки 132, 134 служат для приема большого пальца руки и среднего пальца. Накладки 132, 134 посредством поворачивающихся пинцетных плечей 133, 135 соединены каждая с соответственно одной боковой поверхностью 128, 130 дискообразного основного тела управляющего элемента 124. На окружной поверхности 136 управляющего элемента 124 предусмотрена сдвиговая клавиша 138, которая при соответствующем назначению захвате управляющего элемента 124 может приводиться в действие посредством налегающего указательного пальца. Сдвиговая клавиша 138 может быть соединена с управляющим элементом 124 таким образом, что вращение управляющего элемента 124 вокруг оси 126 вращения вызывает поворот сдвиговой клавиши 138 на тот же самый угол вдоль периферийной (окружной) поверхности 136, так что пинцетные плечи 133, 135 и сдвиговая клавиша 138 находятся в постоянном пространственном соотношении, как это следует из сопоставления фиг.2 с фиг.3 или с фиг.5.
Как показано на фиг.6, сдвиговая клавиша 138 предварительно напряжена пружиной 140 сжатия в первом положении и может перемещаться против пружинной силы пружины 140 сжатия в направлении стрелки Р7. Тем самым приводится в действие микропереключатель 142, вследствие чего запускается согласованная функция манипулятора. После освобождения сдвиговой клавиши 138 она перемещается пружиной 140 сжатия обратно в первое положение.
Таким образом, управляющий элемент 140 имеет возможность вращения вокруг трех осей 106, 114 и 126 вращения, причем эти три оси 106, 114, 126 вращения соответственно ориентированы перпендикулярно друг другу и пересекаются в общей точке 150 пересечения. Диапазон вращения управляющего элемента 140 вокруг каждой из трех осей 106, 114, 116 вращения составляет предпочтительно 360°. В других вариантах осуществления изобретения диапазон вращения также может быть ограничен, например, до 90°. Это ограничение может осуществляться, например, с помощью упора 107.
С помощью датчиков определяется соответствующее поворотное положение управляющего элемента 124 относительно указанных трех осей 106, 114, 126 и манипулятор настраивается таким образом, чтобы хирургические инструменты перемещались соответственно.
Посредством расположения трех осей 106, 114, 126 вращения таким образом, что они пересекаются в общей точке 150 пересечения, становится возможным особенно интуитивное управление, которое дает хирургу ощущение, как если бы он держал бы хирургический инструмент в руке. Кроме того, это ощущение поддерживается тем, что эта точка 150 пересечения находится внутри управляющего элемента 124 между обеими накладками 132, 134 и, в частности, совпадает со средней точкой управляющего элемента 124. Далее, вследствие этого также минимизируется подлежащий компенсации момент инерции масс.
На базовом элементе 102 предусмотрен первый исполнительный элемент, который сопряжен с поворотным блоком 104 посредством первой зубчато-ременной передачи 166, так что поворотный блок 104 может вращаться вокруг первой оси 106 вращения посредством этого первого исполнительного элемента 160.
В свою очередь, на поворотном блоке 104 предусмотрен второй исполнительный элемент 162, который сопряжен с корпусом 112 посредством второй зубчато-ременной передачи 168, так что корпус 112 может вращаться относительно поворотного блока 104 вокруг второй оси 114 вращения.
Внутри управляющего элемента 124 предусмотрен третий исполнительный элемент 164, который соединен с управляющим элементом 124 без возможности вращения и перемещается соответственно вместе с эти элементом. Третий исполнительный элемент 164 посредством шестерни 170 находится в зацеплении с корончатым зубчатым колесом 172, которое, в свою очередь, жестко соединено с корпусом 112. При этом, управляющий элемент 124 может вращаться вокруг третьей оси 126 вращения относительно корпуса 112.
Таким образом, с одной стороны, посредством этих трех исполнительных элементов 160-164 управляющий элемент 124 может снова ориентироваться в предварительно настроенное нулевое положение. С другой стороны, вследствие этого может осуществляться силовая обратная связь, при которой определяются воздействующие на хирургические инструменты манипулятора силы и/или вращающие моменты и посредством исполнительных элементов 160-164 передаются на управляющий элемент, так что хирург испытывает обратную связь от выполняемых манипуляций и, тем самым, воспроизводится реалистичное условие операции, как если бы хирург непосредственно держал хирургические инструменты.
Обе поверхности 128, 130, на которых закреплены накладки 132, 134, выполнены с возможностью откидывания вбок относительно других элементов управляющего блока 124 и относительно корпуса 112, как это показано на фиг.4. При этом образуется пинцетный захват, положение которого определяется датчиками и также передается на управление хирургических инструментов через манипулятор.
На фиг.7 и фиг.8, соответственно, показаны обе поверхности 128 и 130 и обе накладки 132, 134, причем на фиг.8 показано нулевое положение, при котором обе поверхности 128 и 130 ориентированы параллельно друг другу, а на фиг.7 показано максимальное раскрытие пинцетного захвата, при котором обе поверхности 128, 130, соответственно, повернуты относительно нулевого положения, в частности, на максимальный угол в 17°.
Обе накладки 128, 130, соответственно, посредством штанги 176, 178 закреплены на вращаемом диске 174, вследствие чего достигается то, что обе накладки 128, 130 всегда раскрыты относительно нулевого положения на одинаковый угол. При раскрытии и закрытии пинцетного захвата поворачивается сопряженный с диском 174 магнит датчика Холла, посредством которого может определяться соответствующее угловое положение пинцетного захвата и соответственно, может ложиться в основу для настройки манипулятора.
Список ссылочных позиций
10 система
12 манипулятор
14 штатив
16, 16а - 16d манипулирующая рука
18 пациент
20 головка штатива
24 опора штатива
28 консоль штатива
30 целевая операционная зона
31 средняя точка целевой операционной зоны
32 стойка операционного стола
34 операционный стол
36 управляющий блок операционного стола
38 поверхности для опирания пациента
40 центральный управляющий блок устройства
41 блок выдачи
42 пульт управления
46 управляющий блок манипулятора
47 блок выдачи
50 удерживающая консоль
52 точка вращения
100 переходное устройство (интерфейс)
102 базовый элемент
104 поворотный блок
106, 114, 126 ось вращения
107 упор
108, 110, 116, 118 тонкий радиальный подшипник
112 корпус
120, 122 кольцо
124 управляющий элемент
128, 130 наружная поверхность
132, 134 накладка
133, 135 пинцетное плечо
136 периферическая (окружная) поверхность
138 сдвиговая клавиша
140 пружина сжатия
142 микропереключатель
150 точка пересечения
160, 162, 164 исполнительный элемент
166, 168 зубчато-ременная передача
170 шестерня
172 корончатое зубчатое колесо
174 диск
176, 178 штанга
Р1 - Р7 направление
Изобретение относится к медицине, а именно к пультам управления для роботизированных хирургических систем. Пульт выполнен с приводимым вручную управляющим элементом и с переходным устройством для закрепления пульта управления на удерживающем блоке. Управляющий элемент включает в себя две накладки для приема соответственно пальца обслуживающего персонала. Управляющий элемент, когда пульт управления закреплен на удерживающем блоке, имеет возможность вращения относительно переходного устройства вокруг первой оси вращения, второй оси вращения и третьей оси вращения, причем эти три оси вращения соответственно расположены перпендикулярно друг другу. Указанные три оси вращения пересекаются в одной общей точке пересечения. Управляющий элемент включает в себя дискообразное основное тело, а обе упомянутые накладки расположены на обеих сторонах этого основного тела. Достигается повышение точности управления роботизированной хирургической системы. 13 з.п. ф-лы, 8 ил.
1. Пульт управления для роботизированной хирургической системы:
с приводимым вручную управляющим элементом (124), который включает в себя две накладки (132, 134) для приема соответственно пальца обслуживающего персонала, и
с переходным устройством (100) для закрепления пульта (42) управления на удерживающем блоке (50),
причем управляющий элемент (124), когда пульт (42) управления закреплен на удерживающем блоке (50), имеет возможность вращения относительно переходного устройства (100) вокруг первой оси (106) вращения, второй оси (114) вращения и третьей оси (126) вращения, причем эти три оси (106, 114, 126) вращения соответственно расположены перпендикулярно друг другу,
причем указанные три оси (106, 114, 126) вращения пересекаются в одной общей точке (150) пересечения,
отличающийся тем, что управляющий элемент (124) включает в себя дискообразное основное тело, а обе упомянутые накладки (132, 134) расположены на обеих сторонах (128, 130) этого основного тела.
2. Пульт (42) управления по п. 1, отличающийся тем, что точка пересечения (150) расположена между обеими накладками (132, 134), в частности, посередине между обеими накладками (132, 134).
3. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что точка (150) пересечения совпадает со средней точкой управляющего элемента (124).
4. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что пульт (42) управления включает в себя базовый элемент (102), который включает в себя переходное устройство (100), закрепленный на базовом элементе (102) с возможностью вращения относительно базового элемента (102) вокруг первой оси (106) вращения поворотный блок (104) и закрепленный на поворотном блоке (104) с возможностью вращения относительно поворотного блока (104) вокруг второй оси (114) вращения корпус (112), причем управляющий элемент (124) шарнирно установлен на корпусе (112) с возможностью вращения вокруг третьей оси (126) вращения.
5. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что корпус (112) включает в себя два кольца (120, 122), между которыми расположен управляющий элемент (124), и что управляющий элемент шарнирно установлен на корпусе (112) с возможностью вращения посредством радиального подшипника.
6. Пульт (42) управления по п. 4 или 5, отличающийся тем, что предусмотрены первый исполнительный элемент (160), в частности первый мотор, для вращения поворотного блока (104) вокруг первой оси (106) вращения, второй исполнительный элемент (162), в частности второй мотор, для вращения корпуса (112) вокруг второй оси (114) вращения и/или третий исполнительный элемент (164), в частности третий мотор, для вращения управляющего элемента (124) вокруг третьей оси (126) вращения.
7. Пульт (42) управления по п. 6, отличающийся тем, что первый исполнительный элемент (160) расположен на базовом элементе (102), что второй исполнительный элемент (162) расположен на поворотном блоке (104), и/или что третий исполнительный элемент (164) расположен на управляющем элементе (124).
8. Пульт (42) управления по п. 6 или 7, отличающийся тем, что третий исполнительный элемент (164) расположен внутри управляющего элемента (124) без возможности вращения относительно управляющего элемента (124).
9. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что предусмотрены первый датчик для определения поворотного положения вокруг первой оси (106) вращения, второй датчик для определения поворотного положения вокруг второй оси (114) вращения и/или третий датчик для определения поворотного положения вокруг третьей оси (126) вращения.
10. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что управляющий элемент (124) выполнен с возможностью вращения вокруг второй оси (114) вращения и/или третьей оси (126) вращения соответственно на 360°.
11. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что управляющий элемент (124) включает в себя клавишу (138), в частности, сдвиговую клавишу.
12. Пульт (42) управления по п. 11, отличающийся тем, что клавиша (138) выполнена с возможностью вращения вместе с расположенными на обеих сторонах основного тела управляющего элемента (124) накладками (132, 134).
13. Пульт (42) управления по одному из предыдущих пунктов, отличающийся тем, что обе накладки (132, 134) выполнены с возможностью поворота друг от друга на предопределенный угол, так что образован пинцетный захват.
14. Пульт (42) управления по п. 13, отличающийся тем, что обе накладки (132, 134) сопряжены друг с другом таким образом, что они раскрыты относительно нулевого положения всегда на одинаковый угол.
| US 20100228265 A1, 09.09.2010 | |||
| Головка к агрегатам для обработки поверхности кабельных изделий | 1960 |
|
SU139350A1 |
| US 20090171374 A1, 02.07.2009 | |||
| US 20020120363 A1, 29.08.2002 | |||
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕПЛОВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2740434C1 |

