Область техники, к которой относится изобретение
Настоящее изобретение относится к автомобильной области, конкретно, к технической области бортовых устройств для измерения данных, относящихся к параметрам движения и вождения транспортного средства.
В частности, изобретение относится к способу оценки времени в пути транспортного средства на основании определения состояния транспортного средства, соответствующему ограничительной части пункта 1 формулы изобретения.
Уровень техники
В настоящее время применяют бортовые устройства, например, для сбора в реальном времени и дистанционной передачи параметров движения и вождения транспортного средства, которые не только обеспечивают функционирование бортовых систем для содействия управлению транспортным средством, но также необходимы для функционирования других вспомогательных систем, включающие в себя, например, системы диагностики транспортного средства и системы динамической регистрации данных, например, системы, используемые в противоугонных устройствах, в устройствах мониторинга транспортных средств, принадлежащих автопарку, или в устройствах, известных, как черные ящики, для обнаружения фактов нарушений правил дорожного движения или дорожно-транспортных происшествий, например, для правоохранительных органов или страховых компаний.
Как правило, для определения условий вождения транспортного средства (скорость движения, общее время вождения, частота вращения двигателя) используют систему для мониторинга и регистрации динамических данных использования транспортного средства с учетом передачи данных на удаленную станцию анализа. Данные могут периодически передаваться на станцию анализа через бортовую систему связи или просто записываться на надежные носители данных, доступные на транспортном средстве, с которых данные могут быть извлечены позже, например, при прохождении транспортным средством периодического технического обслуживания.
В обоих описанных выше случаях система контроля предназначена для непрерывной регистрации каждого события вождения и каждого интервала бездействия транспортного средства.
Состояние транспортного средства, то есть состояние активности (в работе) или бездействия двигателя транспортного средства, является важной информацией, поскольку оно связано с событиями использования или неиспользования транспортного средства, которые представляют важные данные при проверке условий использования транспортного средства в долгосрочной перспективе, например, при проверке работы транспортных средств, принадлежащих парку транспортных средств. Фактически, в случае когда двигатель транспортного средства работает, можно сделать вывод, что транспортное средство движется (состояние транспортного средства, называемое «движение», включает в себя временные остановки, но исключает длительную парковку), в то время как в случае, когда двигатель транспортного средства не работает, можно сделать вывод, что транспортное средство припарковано.
В настоящее время для определения состояния транспортного средства, при изготовлении которых устанавливают бортовые устройства для определения параметров движения и вождения посредством физического соединения с устройством зажигания и ключом запуска или CAN шиной транспортного средства. Если эти устройства не были установлены во время производства транспортного средства или, если транспортное средство не оснащено обычным устройством зажигания и ключом запуска, то не всегда возможно или удобно (с точки зрения сложности и надежности вмешательства) использовать физическое соединение с сигналом ключа или CAN шиной для определения состояния транспортного средства.
Определение начала и окончания поездки транспортного средства, то есть определение времени поездки транспортного средства, является важной информацией для определенных применений. В некоторых случаях, например, при расчете расстояния, пройденного транспортным средством, неважно знать, было ли это расстояние пройдено за одну поездку или за две, или за большее количество отдельных поездок, при условии, что не будет потеряна информация о поездке в результате ошибочного разделения поездки или ошибочного объединения нескольких поездок. В других случаях, особенно при предоставлении услуг по управлению автопарком, точное отслеживание начала и окончания поездки является важным аспектом. Вероятность того, что одна поездка будет рассматриваться как две отдельные поездки или две отдельные поездки будут рассматриваться как одна поездка, считается основным показателем эффективности для оценки эффективности и надежности службы контроля за использованием транспортного средства посредством использования бортовых устройств для определения данных, касающихся параметров движения и вождения транспортного средства.
Обычно начало поездки соответствует переходу из неактивного состояния двигателя или состояния покоя транспортного средства (в дальнейшем, состояние «ВЫКЛ») в активное состояние двигателя или состояние движения транспортного средства (в дальнейшем, состояние «ВКЛ»), которое может быть определено путем обнаружения перехода между соответствующими состояниями устройства зажигания и ключа запуска транспортного средства.
Окончание поездки, наоборот, соответствует переходу из активного состояния двигателя или состояния движения транспортного средства (состояние «ВКЛ») в неактивное состояние двигателя или состояние покоя транспортного средства (состояние «ВЫКЛ»), которое может быть определено аналогичным образом.
Начало и окончание поездки могут быть точно определены с помощью бортовых устройств для обнаружения данных, относящихся к параметрам движения и вождения транспортного средства, которые физически подключены к узлу электрической системы транспортного средства, при наличии напряжения, если и только в том случае, если состояние устройства зажигания и ключа запуска указывает на активный двигатель или состояние движения транспортного средства. Ошибочные определения состояния транспортного средства могут быть вызваны ошибками оператора при установке бортового устройства при установлении физического соединения с узлом электрической системы транспортного средства, где обнаруженное значение напряжения не соответствует состоянию устройства зажигания и ключа запуска.
Однако существуют случаи, когда устанавливают бортовые устройства, которые не имеют физического соединения с устройством зажигания и ключом запуска, потому что транспортное средство более простое или хотят избежать возможных ошибок оператора при подключении к электрической системе транспортного средства. В этом типе устройства состояние транспортного средства определяют (оценивают) путем определения перемещения транспортного средства или напряжения, которое устанавливается на блоке аккумулирования электрической энергии (аккумулятор) транспортного средства, используемого для запуска теплового двигателя транспортного средства и/или для питания вспомогательных устройств транспортного средства и перезаряжаемого посредством кинетической энергии двигателя.
Определение значения напряжения на аккумуляторе выше известного значения напряжения на аккумуляторе в состоянии покоя и определение перемещения транспортного средства обеспечивают, в комбинации надежные индикаторы состояния транспортного средства. Однако отсутствие таких же показаний не позволяет с уверенностью сделать вывод, что транспортное средство неактивно или находится в состоянии покоя.
Фактически, когда транспортное средство останавливается на короткий период времени, например, из-за дорожных знаков или в условиях дорожного движения или в пробке, устройство зажигания и ключ запуска остается в рабочем состоянии, то есть транспортное средство эффективно используется, хотя признаки активности теплового двигателя могут отсутствовать. Вибрации теплового двигателя в условиях остановки движения могут быть слишком малы, чтобы они обнаруживались датчиками динамики транспортного средства, или могут вообще отсутствовать, когда транспортное средство оборудовано так называемым механизмом запуска/остановки, так что тепловой двигатель перестает работать, когда транспортное средство стоит в течение короткого периода времени, а затем возобновляет работу, когда снова начинает движение.
Сущность изобретения
Задачей настоящего изобретения является предоставление способа для точного определения времени в пути с использованием бортового устройства без физического соединения с устройством зажигания и ключом запуска транспортного средства, в частности, способа устранения описанных ранее недостатков.
Согласно настоящему изобретению настоящую задачу решают с помощью способа определения времени в пути, имеющего признаки, изложенные в п.1 формулы изобретения.
Конкретные варианты осуществления являются предметом зависимых пунктов формулы изобретения, содержание которых следует рассматривать, как неотъемлемую часть настоящего описания.
Дополнительным объектом изобретения является, как заявлено, бортовое устройство для обнаружения данных, относящихся к параметрам движения и вождения транспортного средства, и компьютерная программа или группа программ, исполняемых системой обработки бортового устройства.
Таким образом, настоящее изобретение основано на принципе проверки того, является ли определение состояния транспортного средства, от которого зависит определение начала или окончания поездки, полученное косвенно, например, путем анализа значения напряжения, которое устанавливает на блоке аккумулятора транспортного средства, посредством анализа данных динамики транспортного средства, обнаруженных акселерометром и/или гироскопическими датчиками, или путем анализа данных позиционирования, полученных системой географического позиционирования транспортного средства, неизменными в течение предварительно определенного интервала времени гистерезиса, имеющего цель фильтрации любых возможных аномальных событий обнаружения ложного перехода, потому что он слишком короткий, из активного состояния двигателя или работающего транспортного средства в неактивное состояние двигателя или состояние покоя транспортного средства, или vice versa.
Преимущественно, оптимальный интервал времени гистерезиса определяют анализом вероятностей ошибок в зависимости от выбора интервала времени гистерезиса.
Дополнительные признаки и преимущества изобретения будут описаны более подробно в последующем подробном описании одного из его вариантов осуществления, приведенном в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, кратко описанные в следующем абзаце.
Краткое описание чертежей
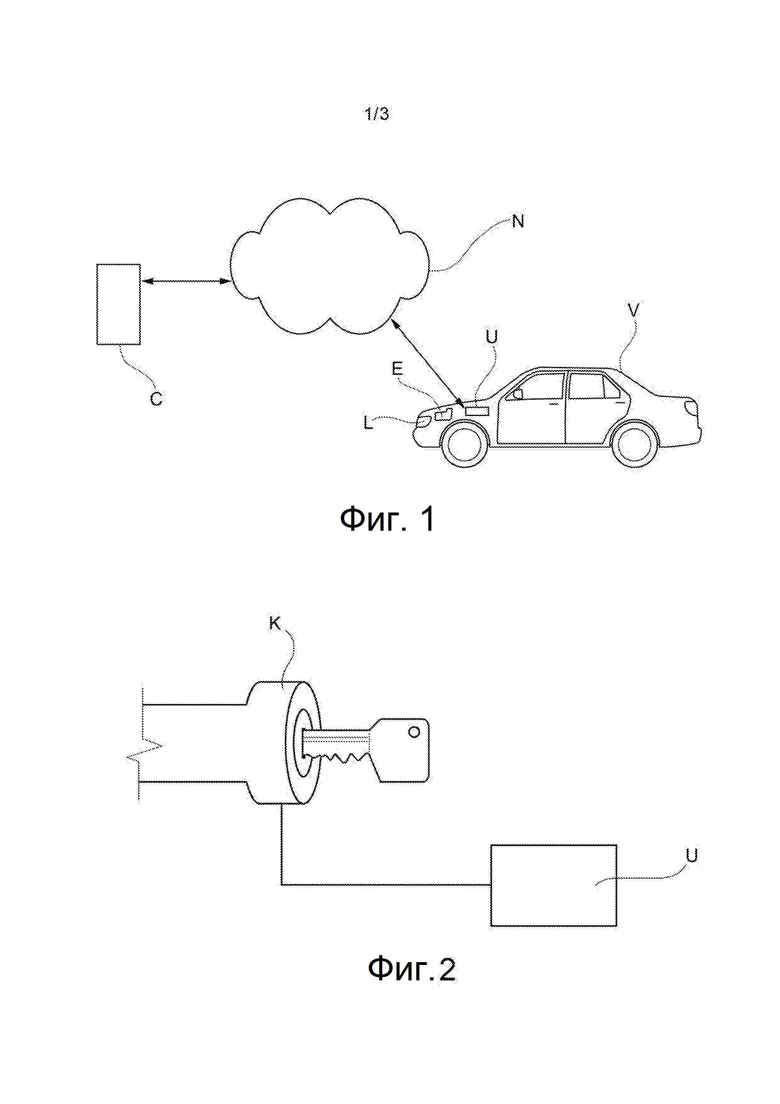
Фиг.1 – схематическое представление контекста применения настоящего изобретения.
Фиг.2 – схематическое представление конфигурации соединения на транспортном средстве устройства для определения данных, относящихся к параметрам движения и вождения транспортного средства, посредством физической линии связи с устройством зажигания и ключом запуска транспортного средства в соответствии с предшествующим уровнем техники.
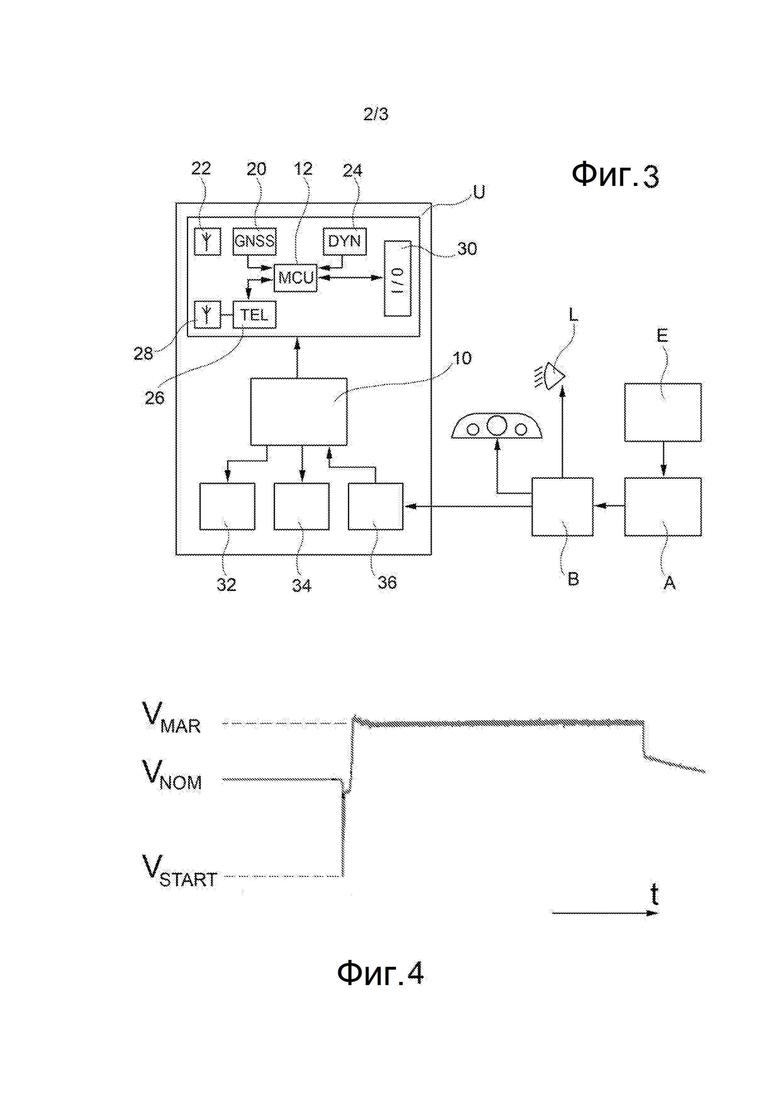
Фиг.3 – функциональная блок-схема неограничивающего варианта осуществления бортового устройства для определения данных, относящихся к параметрам движения и вождения транспортного средства, соединенного с блоком аккумулятора электрического заряда транспортного средства согласно изобретению.
Фиг.4 – схема, показывающая характер изменения напряжения во времени, которое устанавливается на аккумуляторе, используемом для запуска теплового двигателя транспортного средства и/или для электропитания вспомогательных устройств транспортного средства и перезаряжаемого посредством кинетической энергии двигателя, в соответствии с вышеупомянутыми условиями.
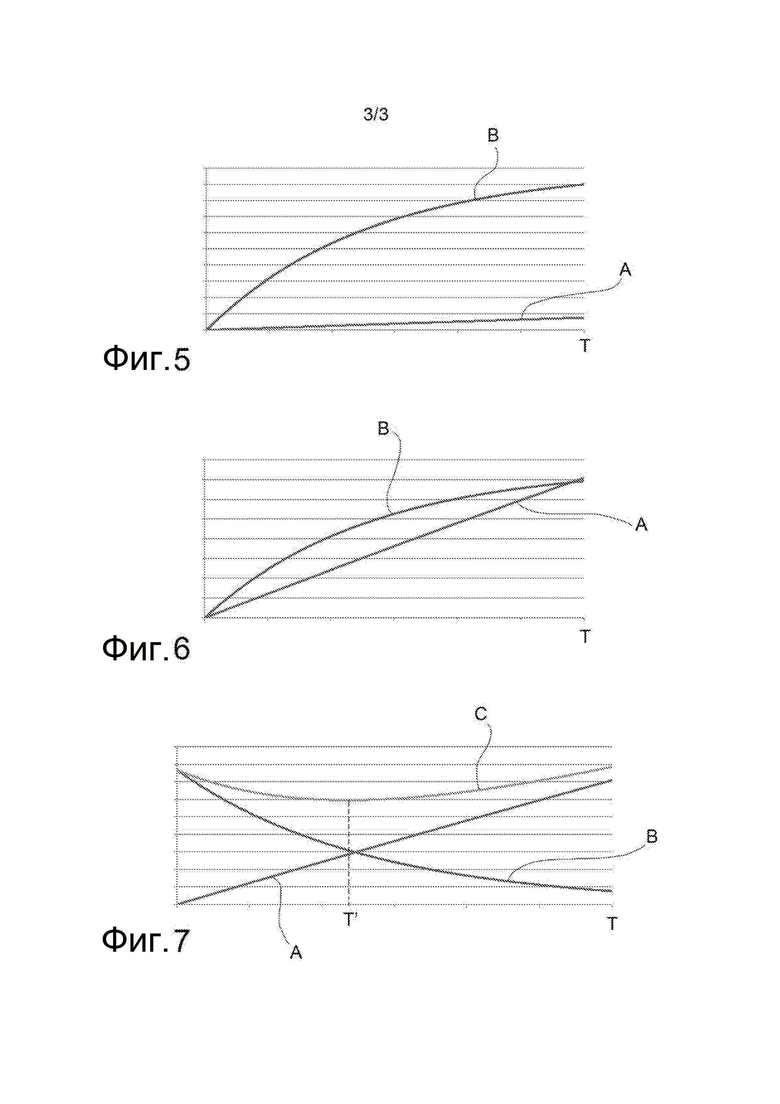
Фиг. 5, 6 и 7 представляют графики вероятности событий на основании оптимизации определения времени в пути согласно настоящему изобретению.
Подробное описание изобретения
На фиг.1 показано применение настоящего изобретения.
На фиг. 1 универсальное транспортное средство обозначено буквой V, например, частный автомобиль или транспортное средство, принадлежащее парку транспортных средств компании. Транспортное средство V оснащено тепловым двигателем E и блоком накопления электрического заряда, называемым просто аккумулятором, обозначенным буквой B, который управляет запуском теплового двигателя и/или является источником электропитания вспомогательного оборудования транспортного средства, такого как осветительные устройства. L, и перезаряжается с помощью кинетической энергии двигателя, обычно с помощью генератора А.
Бортовое устройство для определения данных, относящихся к параметрам движения и вождения транспортного средства, в частности, для сбора данных в реальном времени и дистанционной передачи упомянутых данных, обозначено как U. Это устройство выполнено с возможностью обрабатывать данные, относящиеся к параметрам движения и вождения транспортного средства и для передачи упомянутых данных в удаленный центральный блок C, например, через общедоступную телекоммуникационную сеть N.
В качестве примера и для целей настоящего изобретения, данные, относящиеся к параметрам движения и вождения транспортного средства, являются данными, указывающими время в пути транспортного средства. Время в пути, рассчитанное по определенному времени начала поездки до установленного времени окончания поездки, является полезным элементом данных, например, для проверки условий использования транспортного средства и, возможно, для предоставления различных услуг, относящихся к использованию транспортного средства. Традиционно время начала движения определяют при переходе состояния транспортного средства из неактивного состояния или состояния покоя (в дальнейшем называемого «ВЫКЛ») в состояние активности или движения (в дальнейшем именуемого «ВКЛ»). Аналогично, время окончания движения определяется при переходе состояния транспортного средства из активного или рабочего состояния («ВКЛ») в неактивное состояние или состояние покоя («ВЫКЛ»).
На фиг.2 показана типичная конфигурация предшествующего уровня техники соединения на борту транспортного средства устройства для обнаружения данных, относящихся к параметрам движения и вождения транспортного средства, для определения состояния транспортного средства.
В известной конфигурации бортовое устройство U физически подключено через выделенную проводку к устройству К зажигания и ключу запуска транспортного средства или к аналогичному узлу электрической системы транспортного средства, на которое подается электрическое напряжение, только если ключ запуска транспортного средства поворачивают в положение активации, и в транспортное средство (двигатель и вспомогательные устройства) подают электропитание от аккумулятора.
На фиг.3 показана более подробная иллюстративная блок-схема бортового устройства U согласно изобретению, в конфигурации соединения на борту транспортного средства по настоящему изобретению.
Бортовое устройство U включает в себя микропроцессор 10, выполненный с возможностью получать и обрабатывать данные, относящиеся к параметрам движения и вождения транспортного средства, получаемых с помощью секции получения данных, например, содержащей микроконтроллер 12, подключенный к системе 20 географического позиционирования, показанной на чертеже, совместно со своей антенной 22, к системе 24 определения динамических данных транспортного средства, например, к системе, включающей один или несколько датчиков, таких как датчики положения, наклона или ускорения, выполненных с возможностью предоставлять точную информацию о местоположении и ориентации транспортного средства в пространстве и о динамике его перемещения, и к модулю 26 связи, показанному на чертеже вместе с соответствующей антенной 28, выполненному с возможностью обмена данными с телекоммуникационной сетью N.
Бортовое устройство U также включает в себя интерфейс 30 ввода и вывода, подключенный к микроконтроллеру 12 для подключения к бортовой сети связи транспортного средства, как показано исключительно в неограничивающем и неисключительном примере CAN сети, и к модулям 32, 34 удаленной связи, таким как Wi-Fi или Bluetooth модули связи, для подключения микропроцессора 10 к вспомогательным устройствам, например, используемым для аутентификации водителя транспортного средства и/или для запрета запуска транспортного средства, когда водитель не аутентифицирован.
На фигуре также показан модуль 36 физического соединения для соединения с блоком B аккумулятора электрического заряда транспортного средства, выполненный с возможностью подавать в микропроцессор сигнал, характеризующий значение напряжения, которое устанавливается на блоке аккумулятора.
Для полноты изложения блок B аккумулятора показан в сочетании с зарядным генератором А, приводимым в действие тепловым двигателем E транспортного средства, и в сочетании с некоторыми иллюстративными нагрузками, такими как приборная панель I транспортного средства или фары L транспортного средства.
Фиг.4 представляет схему, показывающую иллюстративный характер изменения напряжения во времени, которое устанавливается на блоке В аккумулятора, используемого для запуска теплового двигателя транспортного средства и/или для электропитания вспомогательных устройств транспортного средства и перезаряжаемого посредством кинетической энергии двигателя Е с помощью генератора А.
Для блока аккумулятора, имеющего номинальное напряжение VNOM 12 В, значение напряжения на блоке в состоянии бездействия или в состоянии покоя транспортного средства, по существу, равно или немного превышает номинальное напряжение VNOM. При запуске теплового двигателя транспортного средства из аккумулятора в течение ограниченного времени, порядка доли секунды, отводится большое количество электрической энергии и происходит резкое падение напряжения на нем, порядка нескольких вольт, до достижения значения VSTART. Впоследствии, когда транспортное средство движется и кинетическая энергия теплового двигателя используется для перезарядки блока аккумулятора через генератор А, значение напряжения на аккумуляторе превышает номинальное значение, например, порядка 2 вольт, среднее значение указывается как VMAR и подвержено влиянию шума до тех пор, пока двигатель транспортного средства не отключится и не вернется в состояние бездействия (или в состоянии покоя), в результате чего, напряжение на аккумуляторе снизится до номинального значения Vnom.
Определение времени в пути транспортного средства выполняют путем измерения времени между началом движения, соответствующим переходу из неактивного состояния двигателя или состояния транспортного средства в состоянии покоя (далее – состояние «ВЫКЛ») в активное состояние двигателя или состояние движения транспортного средства (в дальнейшем – состояние «ВКЛ»), и временем окончания движения, соответствующим, вместо этого, переходу из активного состояния двигателя или состояния движения транспортного средства (состояние «ВКЛ») в неактивное состояние двигателя или состояние транспортного средства в состоянии покоя (состояние «ВЫКЛ»).
Согласно изобретению, переход из неактивного состояния двигателя или состояния транспортного средства в состоянии покоя (состояние «ВЫКЛ») в активное состояние двигателя или состояние движения транспортного средства (состояние «ВКЛ») распознается как событие начала поездки, если определено, что активное состояние двигателя или состояние движения транспортного средства сохраняется неизменным в течение предварительно определенного временного интервала гистерезиса.
Аналогичным образом, переход из активного состояния двигателя или состояния движения транспортного средства (состояние «ВКЛ») в неактивное состояние двигателя или состояние транспортного средства в состоянии покоя (состояние «ВЫКЛ») распознается как событие окончания движения, если определено, что неактивное состояние двигателя или состояние транспортного средства в состоянии покоя остается неизменным в течение предварительно определенного временного интервала гистерезиса.
Заданный временной интервал гистерезиса может иметь разные значения для каждого перехода.
Возможная ошибка в определении времени в пути, которого настоящее изобретение стремится избежать, относится к разделению фактической одиночной поездки на несколько отдельных поездок.
Данная ошибка может возникать, когда транспортное средство останавливается на период времени, превышающий интервал времени гистерезиса, хотя его реальное состояние является состоянием «ВКЛ» в течение всего периода. Это относится, например, к транспортным средствам в пути, которые временно прекращают движение в пробке, даже выключая двигатель (систему пуска/остановки). В этом случае, может быть ошибочно выявлен переход из состояния «ВКЛ» в состояние «ВЫКЛ», даже если он не произошел. Последующий переход из состояния «ВЫКЛ» в состояние «ВКЛ» будет обнаружен, как только впоследствии будет возобновлено движение транспортного средства или работа двигателя. Таким образом, фактически одиночная поездка (например, когда ключ запуска действительно никогда не был переключен в положение «ВЫКЛ») рассматривается как две отдельные поездки.
Другая возможная ошибка в определении времени в пути, которой стремится избежать настоящее изобретение, относится к объединению множества фактически отдельных поездок в одну поездку.
Данная ошибка может возникать, когда транспортное средство фактически прекращает свою работу и заканчивает поездку (посредством чего, например, ключ запуска фактически перемещается в положение «ВЫКЛ»), но остается в состоянии покоя в течение периода времени меньшего, чем временной интервал гистерезиса.
В этом случае, может быть ошибочно обнаружен переход из состояния «ВКЛ» в состояние «ВЫКЛ», указывающий на окончание поездки, и последующий переход из состояния «ВЫКЛ» в состояние «ВКЛ», указывающий на начало отдельной поездки, но не рассмотренный в действительности, хотя это действительно имело место. Следовательно, две фактически отдельные последовательные поездки считаются одной поездкой.
Если временной интервал гистерезиса установлен на очень низкое значение, например, несколько секунд, то частота ошибок при распознавании отдельных поездок вместо реальной одиночной поездки будет очень высокой, поскольку потенциально любая кратковременная остановка работы транспортного средства приведет к определению перехода из состояния «ВКЛ» в состояние «ВЫКЛ». И наоборот, частота ошибок в определении одной поездки вместо фактически отдельных поездок будет значительно уменьшена, поскольку потенциально только «зазоры» в несколько секунд между отдельными поездками (редкие на практике) могут быть ошибочно проигнорированы.
Если временной интервал гистерезиса установлен на очень высокое значение, например, несколько минут, то частота ошибок при распознавании отдельных поездок вместо фактически одиночного отключения будет значительно уменьшена, поскольку потенциально только длительные остановки работы транспортного средства приведут к определению перехода из состояния «ВКЛ» в состояние «ВЫКЛ». И наоборот, частота ошибок в распознавании одной поездки вместо фактически раздельных поездок будет значительно увеличена, поскольку потенциально только «зазоры» в несколько секунд между отдельными поездками (редкие на практике) могут быть ошибочно проигнорированы.
Далее для идентификации оптимального интервала времени гистерезиса приведено описание оценки вероятности возникновения вышеописанных ошибок в зависимости от интервала времени гистерезиса.
В нижеследующем описании «временная остановка» транспортного средства означает остановку, происходящую без отключения двигателя транспортного средства, такую как остановка движения транспортного средства на светофоре или в пробке. Короткие и очень медленные перемещения, такие как движение, необходимое при движении транспортного средства в пробке, считаются эквивалентными временным остановкам, поскольку фактическое перемещение транспортного средства, по существу, незначительное. Кроме того, «окончательная остановка» транспортного средства означает остановку транспортного средства, осуществляемую вместе с отключением двигателя, например, парковку транспортного средства. Временная остановка не является окончанием поездки; вместо этого, окончательная остановка является окончанием поездки.
Pr (t <T | s = final) указывает на условную вероятность того, что окончательная остановка (s = окончательная) продлится в течение временного интервала t, меньшего, чем заданный опорный временной интервал T.
Pr (t <T | s = temporary) указывает на условную вероятность того, что временная остановка (s = временная) продлится в течение временного интервала t, меньшего, чем заданный опорный временной интервал T.
Pr (s = final, t <T) указывает общую вероятность того, что остановка является окончательной (s = окончательная) и что она продлится в течение временного интервала t, меньшего, чем заданный опорный временной интервал T.
Pr (s = temporary, t <T) указывает общую вероятность того, что остановка является временной (s = временная) и что она продлится в течение временного интервала t, меньшего, чем заданный опорный временной интервал T.
Pr(Eb, T) указывает вероятность того, что фактическая одиночная поездка будет разделена на множество (две) отдельных поездок в зависимости от заданного интервала Т времени гистерезиса при выполнении алгоритма определения состояния транспортного средства.
Pr(Em, T) указывает вероятность того, что множество (две) фактических отдельных поездок будет объединено в одну поездку в зависимости от заданного интервала Т времени гистерезиса при выполнении алгоритма для определения состояния транспортного средства.
Pr(E, T) указывает на вероятность того, что фактическая одиночная поездка будет разделена на множество (две) отдельных поездок, и что множество (две) фактических отдельных поездок будет объединено в одну поездку в зависимости от заданного интервала Т времени гистерезиса при выполнении алгоритма определения состояния транспортного средства.
В соответствии с изобретением набор данных о поездках, полученных множеством транспортных средств, рассматривается, например, для более чем 1000 транспортных средств и, предпочтительно, для более чем 10000 транспортных средств, для числа поездок, превышающих 100 000 и, предпочтительно, более 1 000 000, в котором упомянутые данные о поездках характеризуются продолжительностью поездок, совершаемых транспортными средствами, и продолжительностью интервалов временной остановки и конечной остановки. Например, упомянутые данные о поездках получают от бортовых устройств для определения данных, относящихся к параметрам движения и вождения транспортного средства типа, описанного в настоящем изобретении, предпочтительно, ассоциированного с устройством зажигания и ключом запуска транспортных средств, на которых они установлены.
Большой объем данных о поездках позволяет получить значительный набор выборок для оценки распределения событий временной остановки во время поездки.
Используя методы оптимизации интерполяции статистических распределений, для значений интервала Т времени гистерезиса между 0 и заданным верхним пределом, определяют функции вероятности Pr(t <T | s = final) и Pr(t <T | s = temporary). Они показаны на фиг.5. Кривая А показывает, что вероятность того, что событие окончательной остановки продлится меньше предварительно определенного верхнего предела интервала гистерезиса, очень мала, по существу, между 2% и 8% на основании экспериментальных данных, полученных изобретателями. Кривая B показывает, что вероятность того, что событие временной остановки будет длиться меньше заданного верхнего предела интервала гистерезиса, очень высока, существенно выше 30% для относительно небольших значений интервала времени гистерезиса и достигает 90% для более высоких значений интервала времени гистерезиса.
Из этих же данных получены соответствующие совместные вероятности Pr (s = final, t <T) и Pr (s = temporary, t <T), которые также определяются для значений интервала Т времени гистерезиса между 0 и указанным предварительно определенным верхним пределом, показанный на фиг.6.
В качестве примера, на фиг. 6 показана кривая A вероятности того, что событие остановки продлится меньше, чем заданный верхний предел интервала времени гистерезиса, и что это событие является явным событием остановки. Например, на основании экспериментальных данных, полученных изобретателями, такая вероятность составляет около 3,6%. На фиг. 6 также показана кривая B вероятность того, что событие остановки будет длиться меньше заданного верхнего предела интервала времени гистерезиса и что это будет событие временной остановки. Например, такая вероятность составляет приблизительно 5,3% на основании экспериментальных данных, полученных изобретателями.
На фиг. 7 показаны общие характеристики, позволяющие оценить вероятность ошибок Pr(Eb, T), Pr(Em, T) и Pr(E, T).
На фиг. 7 показано, что для низких значений временного интервала гистерезиса (стремящихся к нулю) вероятность ошибочного объединения двух фактических отдельных поездок стремится к 0 (кривая А), в то время как вероятность ошибочного деления фактической одиночной поездки на две отдельные поездки высока (кривая B), поскольку это зависит от того, что каждая временная остановка определяет интерпретацию подразделения фактической поездки на отдельные поездки, если интервал времени гистерезиса установлен на очень низкое значение.
С другой стороны, высокое значение интервала времени гистерезиса приведет к распознаванию меньшего числа подразделений отдельных фактических отключений (например, менее 1% для интервала времени гистерезиса на основании экспериментальных данных, полученных изобретателями) однако количество фактических отдельных поездок, ошибочно объединенных в одну поездку, будет относительно высоким.
Общая вероятность ошибки показана на фиг. 7 кривой C, которая учитывает обе ошибки. Минимальное значение этой кривой позволяет определить оптимальный интервал времени гистерезиса, на фигуре обозначен как T’. То же самое соответствует, например, оптимальному интервалу времени, который определяет минимальную вероятность ошибки.
Кривая C на фиг.7 является важным показателем для конфигурирования оптимального интервала времени гистерезиса в способе определения времени в пути транспортного средства на основании использования бортового устройства, выполненного с возможностью косвенно определять состояние транспортного средства, например, на основании анализа значения напряжения, установленного на блоке аккумулятора транспортного средства, анализа данных динамики автомобиля, обнаруженных акселерометром и/или гироскопическими датчиками или анализом данных позиционирования, полученных системой географического позиционирования транспортного средства.
Когда важность ошибки при распознавании отдельных поездок в случае фактической одиночной поездки равна важности ошибки при распознавании отдельной поездки в случае фактически отдельных поездок, значение интервала времени гистерезиса, соответствующее минимуму кривой вероятности, что фактическая одиночная поездка подразделяется на множество (две) отдельных поездок, и что множество (две) фактически отдельных поездок объединяются в одну поездку, является оптимальным значением интервала гистерезиса.
Когда в силу предполагаемой цели распознавания поездки, важность ошибки, относящейся к подразделению фактической одиночной поездки, больше, чем важность ошибки, касающейся объединения фактически отдельных поездок, тогда интервал времени гистерезиса может быть увеличен за счет большей вероятности ошибки при объединении фактически отдельных поездок. И наоборот, когда важность ошибки в объединении фактически отдельных поездок больше, чем важность ошибки в подразделении фактически одиночной поездки, временной интервал гистерезиса может быть уменьшен за счет более высокой вероятности ошибки при подразделении отдельных фактических поездок.
Стоит отметить, что при реализации способа оценки времени в пути транспортного средства по настоящему изобретению применение временного интервала гистерезиса не обязательно происходит с помощью бортового устройства для определения данных, относящихся к параметрам движения и вождения транспортного средства. В альтернативном варианте бортовое устройство может быть запрограммировано на применение очень короткого временного интервала гистерезиса, близкого или равного нулю, и временной интервал гистерезиса может применяться для обработки данных, которая происходит на центральном удаленном устройстве. Эта возможность обеспечивает эксплуатационную гибкость благодаря наличию временного интервала гистерезиса, установленного в бортовом устройстве, поскольку это позволяет изменять упомянутый временной интервал гистерезиса в соответствии с предполагаемым использованием конкретного бортового устройства или транспортного средства, на котором установлено устройство, например, в зависимости от конкретного транспортного средства, его водителя и, возможно, даже от времени.
Естественно, что без изменения принципа изобретения варианты осуществления и детали реализации могут широко варьироваться в отношении того, что описано и проиллюстрировано исключительно в качестве неограничивающего примера, без отклонения от объема защиты изобретения, определенного прилагаемой формулой изобретения.
Изобретение относится к автомобильным бортовым устройствам. В способе оценки времени в пути транспортного средства на основании определения состояния транспортного средства распознают события начала поездки и события окончания поездки, и вычисляют продолжительность поездки в соответствии с временем, прошедшим между распознанным событием начала поездки и распознанным событием окончания поездки. Определяют, что произошел переход из неактивного состояния двигателя или состояния покоя транспортного средства в активное состояние или состояние движения, если активное состояние двигателя или состояние движения транспортного средства поддерживается неизменным в течение заданного первого временного интервала гистерезиса. Определяют, что произошел переход из активного состояния двигателя или состояния движения транспортного средства в неактивное состояние или состояние покоя, если неактивное состояние двигателя или состояние покоя транспортного средства поддерживается неизменным в течение заданного второго временного интервала гистерезиса. Повышается точность определения времени в пути. 2 н. и 7 з.п. ф-лы, 7 ил.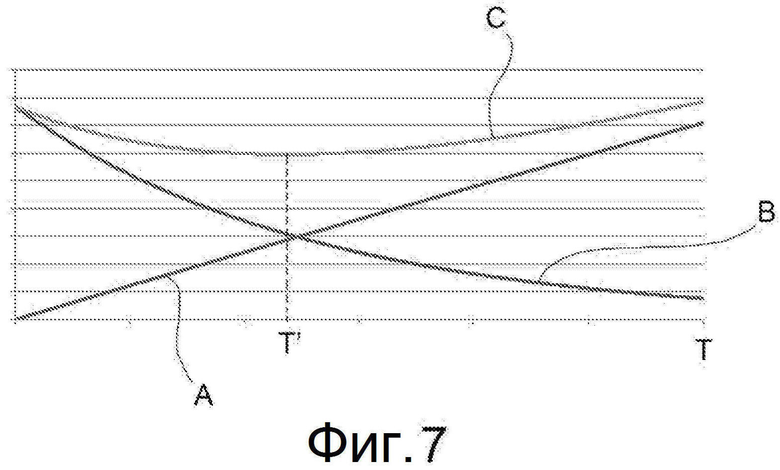
1. Способ оценки времени в пути транспортного средства на основании определения состояния транспортного средства, включающий:
- распознавание события начала поездки, в результате определения перехода из неактивного состояния двигателя или состояния покоя транспортного средства в активное состояние двигателя или состояние движения транспортного средства;
- распознавание события окончания поездки, в результате определения перехода из активного состояния двигателя или состояния движения транспортного средства в неактивное состояние двигателя или в состояние покоя транспортного средства; и
- вычисление продолжительности поездки в соответствии с временем, прошедшим между указанным распознанным событием начала поездки и указанным распознанным событием окончания поездки,
отличающийся тем, что определяют, что произошел переход из неактивного состояния двигателя или состояния покоя транспортного средства в активное состояние двигателя или состояние движения транспортного средства, если активное состояние двигателя или состояние движения транспортного средства поддерживается неизменным в течение заданного первого временного интервала гистерезиса; и
определяют, что произошел переход из активного состояния двигателя или состояния движения транспортного средства в неактивное состояние двигателя или состояние покоя транспортного средства, если неактивное состояние двигателя или состояние покоя транспортного средства поддерживается неизменным в течение заданного второго временного интервала гистерезиса.
2. Способ по п.1, в котором указанный первый и второй временные интервалы гистерезиса имеют идентичные значения.
3. Способ по п.1 или п.2, в котором оптимальный временной интервал гистерезиса определяют по минимуму кривой вероятности ошибки в зависимости от заданного первого и второго временного интервала гистерезиса, при этом ошибка состоит в том, что действительно, одиночную поездку делят на две или более отдельных поездок, вследствие остановки транспортного средства, а две или более действительно отдельных поездок, в результате остановки транспортного средства, объединяют в одну поездку.
4. Способ по п.3, в котором вычисляют указанную кривую вероятности ошибки на основании набора данных о поездке множества транспортных средств для заданного количества совершенных полных поездок, при этом указанные данные о поездке характеризуют продолжительность поездок, совершенных транспортными средствами, и продолжительность интервалов временной и постоянной остановок, ассоциированных с указанными поездками.
5. Способ по п.4, в котором указанные данные о поездках, относящиеся к транспортному средству, получают с помощью бортового устройства для определения данных, относящихся к параметрам движения и вождения транспортного средства, ассоциированным с устройством зажигания и ключом запуска транспортного средства.
6. Способ по любому из пп.1-5, в котором выполняют определение состояния транспортного средства с помощью бортового устройства, выполненного с возможностью определять состояние транспортного средства на основании анализа значения напряжения, которое установлено на блоке электрического аккумулятора транспортного средства.
7. Способ по любому из пп.1-5, в котором выполняют определение состояния транспортного средства с помощью бортового устройства, выполненного с возможностью определять состояние транспортного средства на основании анализа динамических данных транспортного средства, измеренных акселерометром и/или гироскопическими датчиками.
8. Способ по любому из пп.1-5, в котором выполняют определение состояния транспортного средства с помощью бортового устройства, выполненного с возможностью определять состояние транспортного средства на основании анализа данных позиционирования, полученных из системы географического позиционирования транспортного средства.
9. Бортовое устройство для определения данных, относящихся к параметрам движения и вождения транспортного средства, содержащее систему обработки данных для оценки времени в пути транспортного средства, запрограммированную для реализации способа по любому из пп.1-8.
| УСТРОЙСТВО ДЛЯ МАГНИТНОЙ ОБРАБОТКИ ВОДЫ | 2001 |
|
RU2189948C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОФИЛЕЙ С ПЕРФОРИРОВАННЫМИ ОТВЕРСТИЯМИ | 2012 |
|
RU2503516C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПЕНИСТОГО ШЛАКА НАД РАСПЛАВОМ С ВЫСОКИМ СОДЕРЖАНИЕМ ХРОМА В ЭЛЕКТРОПЕЧИ | 2004 |
|
RU2343208C2 |
| US 2011095878 A1, 28.04.2011. | |||

