Область техники, которой относится изобретение
Изобретение относится к области загрузки и выгрузки топливных элементов, в частности, к устройству, которое в случае аварии позволяет осуществить выгрузку перемещаемого топливного элемента в условиях полной безопасности.
Уровень техники
Перемещение топливных элементов типа элементов LWR (легководного ядерного реактора) осуществляют путем их захвата, при этом, как правило, предназначенные для перемещения топливные элементы находятся в исходном вертикальном положении.
В современных конструкциях внутри топливного отсека установлена система вертикального подъема для обеспечения захвата или удержания отработанных топливных элементов, частично погруженных в бассейн в вертикальном положении. После осуществления захвата толкающая цепь осуществляет вертикальный подъем топливных элементов и их горизонтальное выталкивание в сторону отсека разрезания, в котором отработанные топливные элементы разрезают на части перед их растворением в заполненном кислотой баке, называемом диссольвером.
Это перемещение необходимо производить в условиях полной безопасности, и топливные элементы следует всегда укладывать в надежном месте, независимо от неисправностей, которые могут возникнуть, в частности, для того, чтобы восстановить рабочее состояние установки. Кроме того, в случае неисправности ее устранение должно происходить без вмешательства человека, то есть только при помощи дистанционных средств.
Известные в настоящее время погрузочно-разгрузочные устройства являются либо устройствами вертикального перемещения, либо толкающими системами.
На сегодняшний день не существует устройства, которое могло бы одновременно обеспечивать функции вертикального перемещения и горизонтального толкания, которое необходимо для разрезания топлива.
Задача изобретения состоит в разработке решения для перемещения топливных элементов, позволяющего одновременно выполнять функции вертикального перемещения и горизонтального толкания для безопасного извлечения топливных элементов, причем в случае неисправности всей или части погрузочно-разгрузочной системы.
Раскрытие изобретения
Поставленная задача решена в устройстве для захвата топливных элементов, содержащем главную каретку с продольной осью, соединенный с главной кареткой зажим, выполненный с возможностью захвата головки топливных элементов, и вспомогательную каретку с продольной осью, содержащую средства крепления на подъемной/толкающей цепи.
Согласно изобретению, главная и вспомогательная каретки соединены между собой средствами передачи усилий, действующих на средства крепления во время подъема устройства или во время действия на него горизонтального толкающего усилия, причем средства передачи усилия установлены между главной и вспомогательной каретками с возможностью отсоединения, так что разъединение главной каретки со вспомогательной кареткой осуществляется при заблокированной в своих креплениях вспомогательной каретке путем отсоединения средств передачи усилия от кареток путем однократного тянущего или толкающего движения главной каретки, при этом тянущее движение направлено в сторону вспомогательной каретки.
Таким образом, устройство захвата топливных элементов согласно изобретению позволяет реализовать одновременно функции перемещения топливных элементов в вертикальном положении, толкания топливных элементов в горизонтальном положении (при помощи кареток) и позволяет производить устранение неисправности на расстоянии при помощи так называемых дистанционных средств (благодаря возможности разъединения кареток).
Иными словами, в случае неисправности в вертикальном или горизонтальном положении разъединения между каретками устройство захвата позволяет высвободить удаляемые топливные элементы и осуществить операции обслуживания.
Преимуществом легко разъединяемого соединения между различными частями устройства захвата является то, что в случае неисправности получают решение для укладки груза (топливного элемента и его опоры) в условиях полной безопасности и для осуществления ремонта. Возможными случаями неисправности являются блокировка подъемной или толкающей цепи и отключение электрического питания устройства захвата.
Предусмотренное в рамках настоящего изобретения разъединение можно легко осуществить при помощи единого механического тянущего/толкающего движения между каретками. Таким образом, в случае неисправности для осуществления разъединения нет необходимости в наличии сложного оборудования.
Головка топливных элементов, захватываемых устройством захвата, может быть выполнена либо в виде дужки для топливных элементов типа BWR (реактор с кипящей водой в качестве теплоносителя), либо в виде полой внутри детали для топливных элементов типа PWR (реактор с водой под давлением в качестве теплоносителя). Таким образом, устройство захвата в соответствии с настоящим изобретением может захватывать любой топливный элемент типа LWR (BWR+PWR).
Согласно предпочтительному варианту осуществления изобретения восстановление соединения главной каретки с вспомогательной кареткой происходит при заблокированной в своих креплениях вспомогательной каретке путем однократного тянущего или толкающего движения главной каретки, при этом толкающее усилие направлено в сторону вспомогательной каретки.
Предпочтительно средства передачи усилий при разъемном соединении между главной и вспомогательной каретками содержат:
- первый запирающий элемент, установленный на главной каретке с возможностью поворота в направлении, поперечном к продольной оси, и упора во вспомогательную каретку для обеспечения передачи усилий, действующих на средства крепления во время горизонтального толкания,
- второй запирающий элемент, установленный с возможностью поворота перпендикулярно к продольной оси и упора во вспомогательную каретку для обеспечения передачи усилий, действующих на средства крепления во время подъема; при этом тянущее усилие, действующее на главную каретку, обеспечивает поворот первого запирающего элемента, относительное движение главной каретки в сторону вспомогательной каретки и последующий поворот второго запирающего элемента, причем как повернутый первый запирающий элемент, так и повернутый второй запирающий элемент остаются в положении, свободном от какого-либо упора во вспомогательную каретку.
Главная каретка может содержать две жесткие части, соединенные между собой гибким соединением, из которых одна часть соединена с зажимом и содержит электронные весы, позволяющие электрически контролировать усилия растяжения или сжатия, действующие на указанную жесткую часть, на которой установлен зажим, а другая часть содержит каретку, называемую головной, соединенную с вспомогательной кареткой, и захватное гнездо, при помощи которого осуществляется разъединение при тянущем/толкающем движении между головной и вспомогательной каретками.
Согласно одному из вариантов осуществления изобретения главная каретка содержит:
- электрический двигатель,
- установленный с возможностью поступательного перемещения полый вал, один из концов которого связан посредством редуктора типа винт/гайка с электрическим двигателем, а другой его конец опирается на часть захватных губок зажима, при этом приведение в действие электрического двигателя приводит к поступательному движению вала в одном направлении и одновременно к сдвиганию или раздвиганию захватных губок зажима путем их перемещения перпендикулярно к продольной оси.
Предпочтительно устройство захвата в соответствии с настоящим изобретением содержит соединительный рычаг, закрепленный на главной каретке и выполненный с возможностью сообщения поступательного перемещения валу и для его отсоединения от зажима, при этом рычаг выполнен с возможностью управления им при помощи дистанционных средств. Таким образом, в случае отказа электрического двигателя можно при помощи дистанционных средств отсоединить зажим, держащий головку топливных элементов и таким образом высвободить последние, например, в отсеке разрезания топливных элементов.
Дистанционными средствами, применяемыми в рамках изобретения, могут быть любые средства, обычно используемые или которые могут быть использованы в системе рециркуляции ядерного топлива, в частности, в отсеке топливных элементов и контроля на входе отсека разрезания предназначенного для рециркуляции отработанного топлива.
Согласно одному из вариантов осуществления изобретения:
- зажим содержит корпус, на котором с возможностью поворота установлены захватные губки и с возможностью скольжения вдоль оси между губками установлен шток,
- внутри полого вала закреплен стержень, опирающийся на шток зажима, при этом длина штока зажима выбрана так, чтобы в одном из крайних положений губок зажима, сдвинутом или раздвинутом, соответствующем положению захвата головки топливных элементов, эта головка и шток зажима входили между собой в прямой контакт.
Предпочтительно стержень, закрепленный внутри полого вала, содержит выступ, проходящий поперечно к оси, образуя флажок, а главная каретка содержит первый датчик положения, расположенный напротив флажка для электрического обнаружения прямого контакта между головкой топливных элементов и штоком зажима.
Согласно одному из вариантов осуществления изобретения главная каретка содержит фиксаторы, установленные с возможностью поворота поперечно к продольной оси, корпус зажима содержит стенку с уступами, а вал содержит закрепленные на его периферии рельефные элементы, при этом при повороте фиксаторов рельефными элементами и опоре повернутых фиксаторов на уступы корпуса зажима зажим и вал оказываются соединенными.
В качестве средства для стопорения соединения главной каретки с зажимом предпочтительно используется шип, расположенный в стенке корпуса зажима поперечно к продольной оси главного корпуса и обеспечивающий блокировку поступательного перемещения одного относительно другого, при этом шип выполнен с возможностью извлечения при помощи дистанционных средств. Таким образом, как будет пояснено ниже, в случае неисправности извлечение этого шипа дистанционными средствами позволяет отсоединить зажим от главной каретки.
Согласно одному из вариантов осуществления изобретения полый вал содержит выступ, который проходит поперечно к оси, образуя флажок, а главная каретка содержит первый и второй датчики положения, каждый из которых находится напротив флажка в данном положении при поступательном перемещении полого вала для электрического обнаружения данного положения при поступательном перемещении рельефных элементов и, следовательно, обнаружения поворота или отсутствия поворота фиксаторов.
Согласно другому предпочтительному варианту осуществления изобретения корпус зажима содержит выступ, проходящий поперечно к оси, образуя флажок, причем главная каретка содержит третий датчик положения, который после соединения зажима с главной кареткой оказывается напротив флажка, электрически обнаруживая присутствие зажима.
Еще одним объектом изобретения является погрузочно-разгрузочная система для загрузки и выгрузки топливных элементов, содержащая:
- поворотный мост, содержащий желоб, в котором с возможностью перемещения с качением установлены каретки описанного выше устройства захвата,
- погрузочно-разгрузочную систему, содержащую цепь подъема/толкания, часть которой связана со средствами крепления вспомогательной каретки описанного выше устройства захвата, при этом цепь подъема/толкания обеспечивает возможность перемещения с качением устройства захвата в горизонтальном положении наружу желоба поворотного моста.
Объектом изобретения является также зажим, содержащий:
- корпус с продольной осью,
- захватные губки, содержащие выемки и установленные на корпусе с возможностью поворота вокруг оси, перпендикулярной продольной оси корпуса,
- шток, установленный с возможностью перемещения со скольжением в корпусе вдоль продольной оси, при этом шток содержит выступы в виде пальцев, отстоящих от оси в поперечном направлении и имеющих форму, соответствующую форме выемок, при этом пальцы выполнены с возможностью захождения в выемки захватных губок при поступательном перемещении штока и их блокировки в крайнем положении размыкания или смыкания.
Со стороны свободного конца захватных губок шток зажима в соответствии с настоящим изобретением имеет достаточную длину для обнаружения наличия извлекаемого элемента и контакта с ним, когда пальцы блокируют губки в крайнем положении размыкания или смыкания.
Разумеется, каждый тип зажима соответствует определенному типу предназначенных для перемещения топливных элементов.
Дополнительно объектом настоящего изобретения является способ перемещения топливных элементов, согласно которому в случае возникновения неисправности во время рабочей операции перемещения:
- часть устройства захвата топливных элементов соединяют с аварийными механическими средствами перемещения,
- часть устройства захвата, соединенную с аварийными механическими средствами, отсоединяют при помощи дистанционных средств от остальной части устройства захвата, соединенной с рабочими механическими средствами перемещения.
Операцией перемещения может быть либо подъем, либо поворот относительно горизонтали, либо горизонтальное толкание.
Предпочтительно приведение в действие дистанционных средств приводит к единому движению натяжения-толкания, отсоединяющему друг от друга части устройства захвата.
Таким образом, устройство захвата, соответствующие зажим и погрузочно-разгрузочная система согласно изобретению обеспечивают:
1) при нормальной работе (то есть в отсутствие неисправности или аварии):
- вертикальное и горизонтальное перемещение разных типов топливных элементов,
- захват этих топливных элементов,
- контроль наличия извлекаемых топливных элементов,
- выбор и установку различных захватных зажимов в зависимости от типа извлекаемых топливных элементов,
- электрический контроль нахождения зажима,
- контроль усилий, проходящих в кинематической цепи погрузки-разгрузки,
- контроль положения при различных движениях (наличие топливного элемента, нахождение зажима и контроль двух крайних положений зажима, т.е. сомкнутого и разомкнутого).
2) в аварийном режиме (то есть в случае аварии или неисправности):
A) в вертикальном положении:
- отсоединение части устройства захвата, содержащей зажим и извлекаемый топливный элемент, от рабочей цепи подъема,
- захват другим средством подъема отсоединенной части устройства захвата, содержащей зажим и извлекаемый топливный элемент,
- высвобождение извлекаемого топливного элемента из отсоединенной части устройства захвата, затем его укладка в соответствующий держатель,
B) в горизонтальном положении:
- отсоединение части устройства захвата, содержащей зажим и извлекаемый топливный элемент, от рабочей цепи толкания,
- толкание топливного элемента в предназначенное для него место, например, в машину для разрезания,
- высвобождение топливного элемента.
C) в любом положении:
- восстановление конфигурации всего устройства захвата и погрузочно-разгрузочной системы.
Другие особенности и преимущества настоящего изобретения будут более понятны из дальнейшего подробного описания со ссылками на чертежи.
Краткое описание чертежей
На фиг.1 представлен общий вид погрузочно-разгрузочной системы в соответствии с настоящим изобретением, в которой использовано устройство захвата согласно этому изобретению;
на фиг.1А схематично показано устройство захвата в соответствии с настоящим изобретением, вид в поперечном разрезе;
на фиг.2 - то же, в продольном разрезе;
на фиг.2A - фрагмент изображения на фиг.2, на котором показан зажим, позволяющий захватывать топливные элементы;
на фиг.3A показана часть устройства захвата согласно одному из вариантов осуществления изобретения, вид в продольном разрезе;
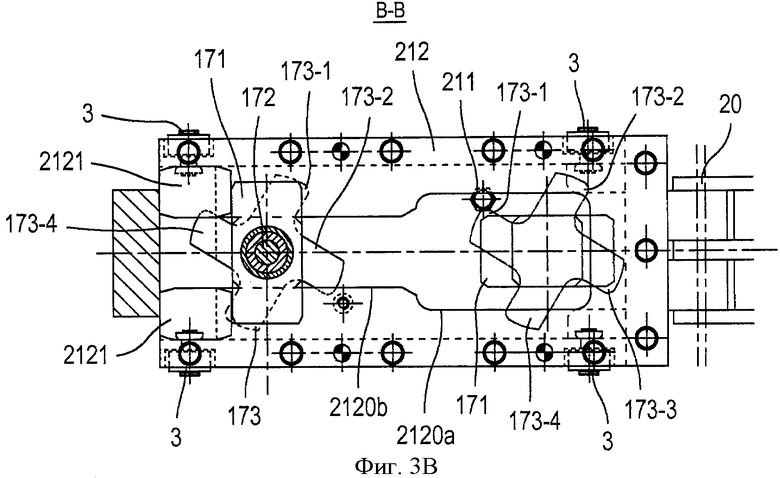
на фиг.3B-3D - различные виды в разрезе устройства, изображенного на фиг.3A;
на фиг.3E показана часть устройства захвата согласно одному из вариантов осуществления изобретения, вид в перспективе.
Осуществление изобретения
Погрузочно-разгрузочная система S для перемещения топливных элементов в соответствии с настоящим изобретением содержит устройство захвата Р.
Устройство захвата Р содержит главный корпус 1 и вспомогательный корпус 2 с продольной осью XX', каждый из которых снабжен элементами 3 качения, такими как ролики, образуя тем самым каретки.
В данном случае названия «главная каретка» и «вспомогательная каретка» используются относительно захватываемых топливных элементов. Так, главная каретка 1, называемая также грейфером, является опорой, на которой установлен зажим 6 для захвата топливных элементов, а вспомогательная каретка 2 является промежуточной кареткой между главной кареткой 1 и передней частью толкающей цепи, обеспечивающей горизонтальное и вертикальное перемещение. Эту переднюю часть цепи называют также носком толкающей части.
В погрузочно-разгрузочной системе S в соответствии с настоящим изобретением вспомогательная каретка 2 соединена при помощи средств 20 крепления (фиг.2) с системой подъема и толкания, подъем которой обеспечивается двигателем 4 (фиг.1), закрепленным на поворотном мосту (не показан).
Поворотный мост обеспечивает перемещение устройства захвата Р из вертикального положения в горизонтальное. Кинематическая цепь погрузки-разгрузки содержит толкающую цепь, приводимую в действие приводом с двигателем. В известных устройствах, в которых перемещение было только вертикальным, использовали системы со средствами перемещения в виде цепей или тросов.
Главный корпус 1 устройства захвата Р установлен с возможностью перемещения в желобе 5 U-образной формы поворотного моста при помощи элементов 3 качения.
Желоб 5 поворотного моста обеспечивает направление устройства захвата Р за счет его опоры одновременно в горизонтальном и вертикальном направлениях, а также поступательное перемещение извлекаемых топливных элементов во время их горизонтального перемещения в соответствующую машину для разрезания (фиг.1A).
Главный корпус 1 соединен с зажимом 6 захвата топливных элементов (не показаны). В положении подъема соединенный таким образом зажим 6 находится в нижней части корпуса 1.
Зажим 6, более подробно показанный на фиг.2А, содержит следующие элементы:
1) трубчатый блок 60, внутренняя форма которого приспособлена для соединения с главным корпусом 1;
2) губки 61 для захвата топливных элементов, установленные с возможностью перемещения перпендикулярно оси XX', каждая из которых содержит часть, образующую захват 610, форма которого адаптирована к типу перемещаемого топливного элемента, и часть 611, форма которой приспособлена для обеспечения различных поворотов (сдвигание или раздвигание губок 61), что будет описано ниже;
3) шток 62 обнаружения наличия топливных элементов, установленный с возможностью поступательного перемещения в направляющих 620, неподвижно соединенных с трубчатым блоком 60,
4) механический стопор 63, неподвижно соединенный со штоком 62 обнаружения, который блокирует любое движение захватов 610, когда топливный элемент не обнаружен (маневр захвата), или при перемещении топливного элемента (несвоевременное размыкание: опускание штока при выборке зазоров во время операции подъема). В представленном варианте осуществления изобретения (фиг.2 и 2A) механический стопор 63 образован пальцами 630, неподвижно соединенными в поперечном направлении со штоком 62, которые при поступательном перемещения штока 62 заходят в выемки 6100 ответной формы, выполненные внутри захватов 610. Иными словами, зажим 6 содержит подобие автоматического устройства стопорения губок 61, которое является чисто механическим за счет вхождения пальцев 630 в губки в их крайнем положении, которое соответствует положению захвата топливных элементов.
В варианте выполнения, показанном на фиг.2, имеется также система аварийного стопорения, которая после соединения зажима 6 с главным корпусом 1 позволяет застопорить это соединение. Как показано на фигуре, эта система содержит шип 64, неподвижно соединенный с зажимом 6 и расположенный перпендикулярно к продольной оси XX' главного корпуса. Управление этим шипом 64 может осуществляться при помощи дистанционных средств.
Главный корпус 1 содержит также систему управления, обеспечивающую соединение с зажимом 6, и приводимую в действие вручную при помощи дистанционных средств. Эта система управления содержит рычаг 10, поступательно перемещающий цилиндрический полый вал 11, который через систему рельефных элементов, образующую кулачок 110, заставляет поворачиваться несколько фиксаторов 111. Рычаг 10 может быть заблокирован при помощи автоматического устройства 100 стопорения, неподвижно соединенного с главным корпусом 1. Полый цилиндрический вал 11 посажен на такой же полый вал 12 управления губками 61 захвата топливных элементов. В один конец 120 полого вала 12 вставлен шток 62 системы обнаружения наличия топливных элементов.
Как показано на фиг.2А, захватное положение зажима 6 соответствует взаимному сближению губок 61 зажима в крайнем положении смыкания с блокировкой поступательного перемещения фиксаторами 111. Это положение контролируется электрически при помощи механического флажка 7а, образованного выступом, расположенным поперечно к оси перед электрическим датчиком 8b положения. Другой электрический датчик 8а положения обнаруживает крайнее положение размыкания, когда флажок 7а оказывается напротив него.
Корпус 1 содержит также систему управления зажимом 6 захвата топливных элементов. Эта система содержит электрический привод 9, который при помощи зубчатой передачи 90 и редуктора 91 типа винт-гайка приводит в поступательное движение конец полого вала 12. Другой конец вала 12 содержит расширение 120, обеспечивающее передачу движения за счет опоры на часть 611 зажима 6.
Характерные положения при движении, а также нахождение корпуса зажима контролируются электрически при помощи механических флажков 7а, 7b, располагающихся перед датчиками положения 8а, 8b и 8с, соответственно. В частности, наличие захваченного топливного элемента обнаруживают при помощи флажка 7а и двух электрических датчиков 8а, 8b. Нахождение зажима 6 определяют при помощи флажка 7b и датчика 8с, положение зажима 6 и топливного элемента - при помощи флажка 7а и двух датчиков 8а, 8b. Двигатель 9 с зубчатой передачей 90 и редуктором 91 можно снять вручную при помощи дистанционных средств. Двигатель 9 электрически подсоединен через дистанционно управляемый разъем с электрической коробкой 13. Эта электрическая коробка установлена на устройстве электрического питания (не показано) двигателя 9. Все датчики 8, 8а, 8b положения находятся в коробке 14, электрически соединенной с коробкой 13 и тоже установленной на устройстве электрического питания. Электрическая коробка 13 содержит различные электрические линии соединения, доходящие до грейфера 1, 6, и электрически соединена с барабаном поворотного моста через опорной цепи для кабеля.
Главный корпус 1 содержит также электронные весы 15, соединяющие захватную часть 6, 7, 8, 9, 90, 91, 10, 11, 110, 111, 12, 120 стационарного корпуса 1 с промежуточной системой 16 соединения. Эти весы 15 позволяют контролировать усилия, действующие в направлениях растяжения и сжатия во время подъема и толкания устройства захвата, соответственно. Весы 15 электрически соединены через разъем с коробкой 13, установленной на устройстве электрического питания. В представленном варианте выполнения весы 15 можно демонтировать при помощи дистанционных средств, как и подключенный разъем.
Промежуточная система 16 соединения содержит крепление 160, соединяющее ее с головной кареткой 17, и захватное гнездо 161, форма которого выполнена подходящей для взаимодействия со средствами подъема, которыми оборудован топливный отсек, в котором предназначенные для извлечения топливные элементы погружены в бассейн. Крепление 160 имеет U-образную форму и соединено с весами 15.
Крепление 160 соединено с головной кареткой 17 при помощи заходящего в них шплинта 162. Этот шплинт 162 выполнен с возможностью его извлечения при помощи дистанционных средств.
Захватное гнездо 161 используется только в случае выхода из строя рабочей цепи.
Перемещение устройства Р в желобе 5 поворотного моста осуществляют, используя гнездо 161 (при вертикальном перемещении).
Устройство захвата содержит также вспомогательную каретку 2, оборудованную элементами качения 3 и соединенную с головной кареткой 17 главного корпуса 1.
Эта вспомогательная каретка 2 содержит средства 20 крепления, соединенные с толкающей цепью погрузочно-разгрузочной системы.
Соединение между каретками 1 и 2 осуществлено также при помощи средств передачи усилий, действующих на средства 20 крепления во время подъема устройства и во время горизонтального толкания устройства.
Представленные средства передачи усилия образованы набором из двух запирающих элементов 170 и 171.
Первый запирающий элемент 170 установлен с возможностью поворота поперечно к оси XX'. Шплинт 163 неподвижно соединяет захватное гнездо 161 с основанием 164, которое перемещается со скольжением на каретке 17 и между деталями 1640, 1641 и 1642, в том числе основанием 1640, на котором установлена ось 1643 (фиг.3A и 3C). Пружина 1644 удерживает узел, образованный гнездом 161 и шплинтом 163, в крайнем положении упора (фиг.3A и 3C).
Второй запирающий элемент 171 имеет Т-образную форму и установлен с возможностью поворота на оси 172, закрепленной на головной каретке 17 поперечно к оси XX'.
Таким образом, во время нормальной работы системы загрузки и выгрузки топливных элементов запирающие элементы 170 и 171 опираются на переднюю часть вспомогательной каретки 2, образованную площадками 2121, таким образом, что:
- во время подъема неповернутый запирающий элемент 171 опирается на площадки 2121 вспомогательной каретки 2 (фиг.3E),
- во время толкания вспомогательная каретка 2 опирается на не повернутый запирающий элемент 170 (фиг.3A).
Описанная ниже система 173 рычагов тоже установлена с возможностью поворота на оси 172 (фиг.3А-3Е). Эту систему 173 рычагов, расположенную под вторым запирающим элементом 171, стопорят в двух угловых положениях при помощи описанной ниже системы 174 стопорения. Таким образом, система 173 рычагов и второй запирающий элемент 171 неподвижно соединены во вращении в этих двух угловых положениях при помощи стопора 174, но свободны во вращении относительно друг друга между этими двумя угловыми положениями.
Вспомогательная каретка 2 содержит раму 21 U-образного поперечного сечения с основанием 210. На этом основании 210 закреплен штифт 211. Основание 210 закрыто сверху крышкой 212 (фиг.3В и 3Е).
Крышка 212 содержит проем 2120, выполненный с возможностью блокировки системы 173 рычагов в вертикальном направлении внутри рамы 21, когда головная 17 и вспомогательная 2 каретки соединены между собой (фиг.3В и 3Е).
Проем 2120 содержит закрытый со стороны средств 20 крепления первый участок 2120а шириной L, превышающей ширину ножки Т запирающего элемента 171, и второй участок 2120b в продолжении первого участка 2120а (фиг.3В и 3Е).
Крышка 212 содержит также площадки 2121, образующие выступы по обе стороны от открытого участка 2120b проема 2120. Эти площадки образуют переднюю часть вспомогательной каретки 2, на которую опираются запирающие элементы 170 и 171 для передачи усилий между соединенными между собой головной 17 и вспомогательной 2 каретками.
Таким образом, как будет описано ниже, формы каретки 2 и поворотного запирающего элемента 171 выполнены таким образом, чтобы обеспечивать соединение и отсоединение части (главная каретка 1) от устройства захвата Р толкающей цепи (с которой остается соединенной вспомогательная каретка 2) в случае аварии или для операций обслуживания с использованием только дистанционных средств и подъемных средств окружающего отсека.
Кроме того, для некоторых операций обслуживания кинематической цепи подъема погрузочно-разгрузочной системы S соединительные стойки гнезда 161 оборудованы втулками, позволяющими посадить устройство захвата S на желоб 5 поворотного моста.
Далее подробно описаны случаи отказов погрузочно-разгрузочной системы S, влияющих на устройство захвата Р, а также решения для их устранения согласно представленному варианту осуществления изобретения.
Блокировка подъемной цепи в вертикальном положении
В этом случае осуществляют следующие операции по устранению неисправности.
a) захват устройства захвата Р и его груза (топливные элементы, удерживаемые зажимом 6) на уровне гнезда 161 при помощи погрузочно-разгрузочного средства отсека, в котором находятся топливные элементы,
b) подъем, увлекающий основание 164, сжимая пружину 1644 и разблокируя тем самым поворотный запирающий элемент 170. Это приводит к относительному движению между головной кареткой 17 и вспомогательной кареткой 2; при этом запирающий элемент 171 поворачивается из своего углового положения опоры на площадки 2121 (фиг.3В) в другое положение, в котором он может перемещаться, скользя в пазу 2120а, но не может опираться на площадки 2121 (пунктирные линии на фиг.3В);
c) опускание, которое не приводит к повороту запирающего элемента 171. Действительно, ножка Т запирающего элемента 171 препятствует повороту, поскольку направляется в участке 2120b проема 2120.
d) после опускания на этапе c) устройство Р и его груз (топливные элементы, удерживаемые зажимом 6) отсоединяются от толкающей цепи и могут быть перемещены при помощи подъемного устройства отсека.
Для перемещения необходимо повернуть гнездо 161 путем извлечения шплинта 163. Поворот гнезда 161 происходит при этом вокруг оси, неподвижно соединенной с промежуточной системой 16 соединения, после перемещения вверх гнезда 161. Поворот гнезда 161 позволяет грейферу 1, 16, 6 занять положение равновесия сразу после выхода из желоба поворотного моста.
После перемещения устройства Р и его груза в надежное место груз (топливные элементы и их держатель в положении захвата) можно отсоединить от устройства захвата и от зажима 6 путем подачи питания на привод 9 захвата груза, если он остается в рабочем состоянии, или разблокировки зажима 6 относительно главного корпуса 1 (приведение в действие соединительного рычага 10), при этом подъем устройства создает относительное движение между корпусом 1 и зажимом 6, которое приводит к раздвиганию пальцев 610 захвата груза и, следовательно, к высвобождению груза, затем зажим вытягивают и отсоединяют при помощи предохранительного стопора 64.
Блокировка подъемной цепи в горизонтальном положении:
Возможны два случая:
- ситуация позволяет вернуться к вертикальному положению, и в этом случае устранение неисправности осуществляют так, как было указано выше, после перемещения при помощи поворотного моста,
- возврат к вертикальному положению невозможен.
В этом последнем случае осуществляют следующие действия:
- повторяют операции, описанные выше для случая блокировки цепи в вертикальном положении, с заменой подъемного средства отсека средством толкания/натяжения. После отсоединения устройства захвата Р от цепи устройство захвата Р и его груз перемещают толканием (топливные элементы, удерживаемые зажимом 6) в безопасное положение,
- отсоединяют груз (топливные элементы) от зажима 6, как было описано выше,
- удаляют устройство Р с его зажимом 6 для ремонта.
Далее будут более подробное описаны указанные выше этапы b) и c), которые позволяют произвести разъединение главной каретки 1 и вспомогательной каретки 2.
Прежде всего, следует уточнить, что система 173 рычагов в представленном варианте осуществления изобретения (фиг.3А-3Е) является единой деталью, состоящей из двух пар рычагов 173-1, 173-3 и 173-2, 173-4. Каждая пара находится на разных уровнях вдоль поворотной оси 172, при этом два рычага 173-1, 173-3 и 173-2, 173-4 одной пары являются по существу диаметрально противоположными относительно оси 172, тогда как два рычага 173-1, 173-2 двух разных пар образуют угол около 90°. Таким образом, если смотреть вдоль оси 172, система 173 рычагов по существу имеет вид прямоугольной крестовины (см. фиг.3В).
Кроме штифта 211, закрепленного на основании 210, во вспомогательной каретке в соответствии с настоящим изобретением установлен другой штифт 213, закрепленный снизу крышки 212 в сужающейся зоне 2120b проема.
Относительное поступательное движение головной каретки 17 в сторону вспомогательной каретки 2 (соответствующее подъему заблокированной каретки 2 или опусканию заблокированной каретки 17) сначала приводит к тому, что основание 164 заставляет повернуться запирающий элемент 170. Затем это поступательное движение приводит один из рычагов 173-1 в контакт с штифтом 211, закрепленным на основании 210, который заставляет повернуться на четверть оборота соединенный неподвижно во вращении запирающий элемент 171, так что запирающий элемент 171 располагается таким образом, что его длина оказывается параллельной поступательному движению (запирающий элемент 171, показанный пунктиром на фиг.3В). Это расположение становится возможным, так как запирающий элемент 171 может свободно поворачиваться в расширенном проеме 2120а. Таким образом, становится возможным отсоединение вспомогательной каретки 2 от главной каретки 1.
Затем, за счет относительного поступательного движения головной каретки 17, отходящей от вспомогательной каретки 2, штифт 213 входит в контакт с другим рычагом 173-2, находящемся на уровне, отличном от уровня рычага 173-1, что заставляет опять повернуться на четверть оборота систему 173 рычагов, но не запирающий элемент 171, заблокированный от вращения. Действительно, в зоне 2120b проема ножка запирающего элемента 171 заблокирована от вращения.
Этот последний поворот на четверть оборота перемещает систему 173 рычагов в угловое положение на 180° из ее первоначального положения. Таким образом, можно осуществить восстановление соединения между вспомогательной кареткой 2 и главной кареткой 1 за счет восстановления соединения запирающего элемента 171, который опять опирается на площадки 2121, при помощи единого толкающего/тянущего движения, действующего на главную каретку 1.
Таким образом, в варианте осуществления изобретения, показанном на фиг.3А-3Е, операции можно осуществить следующим образом:
1) Операция разъединения: тянущее движение в заднем направлении вспомогательной каретки 2, заблокированной от поступательного движения, приводит рычаг 173-1 в положение опоры на штифт 211, что заставляет запирающий элемент 171 повернуться в его угловое положение высвобождения (пунктирная линия на фиг.3В). Затем толкающее движение в переднем направлении приводит рычаг 173-4, который находится на другом уровне относительно рычага 173-1, в положение опоры на штифт 213, что заставляет всю систему 173 рычагов совершить второй поворот, но без поворота запирающего элемента 171, на такой же ход и в том же направлении, что и первый поворот от штифта 211. Это отсутствие поворота запирающего элемента 171 во время этого второго поворота возможно благодаря наличию системы стопора 174, которая позволяет системе 173 рычагов повернуться относительно запирающего элемента 171, когда последний заблокирован от вращения (в проеме 2120b).
2) Операция восстановления соединения: движение толкания головной каретки 17 или всей главной каретки 1 с захождением запирающего элемента 171 в проем 2120b во вспомогательной каретке опять приводит один из рычагов 173-1, 173-3 в положение контакта с штифтом 211 и тем самым опять перемещает неподвижно во вращении соединенный запирающий элемент 171 в его положение блокировки площадками 2121. В варианте осуществления изобретения, показанном на фиг.3В, во время разъединения в контакт с штифтом 211 входит рычаг 173-1, а во время повторного соединения в контакт с штифтом 211 входит другой рычаг 173-3.
В варианте осуществления изобретения, показанном на фиг.3А, стопор 174 выполнен в виде системы толкателя с шариками/выемками, расположенной между поворотным запирающим элементом 171 и системой 173 рычагов. В частности, шарики 1740 установлены в единой детали 173, образующей систему рычагов, и блокируются в четырех угловых положениях через 90° относительно друг друга в выемках 1741 ответной формы, выполненных в нижней части запирающего элемента 171. Не показанная на фигуре пружина (интегрированная в шарики 1740) обеспечивает удержание шариков 1740 в их выемках 1741, что требует приложения минимального усилия для осуществления поворота системы 173, не поворачивая запирающего элемента 171. Другая пружина 1742 обеспечивает удержание системы 173 рычагов в защелках.
В варианте осуществления изобретения, показанном на фиг.2А, зажим 6 выполнен так, что для захвата топливных элементов губки 610 приближаются друг к другу. Разумеется, в рамках настоящего изобретения можно выполнить зажим, в котором губки отходят друг от друга для захвата головки топливных элементов при условии, что этот зажим соединен с главным корпусом.
Зажим 6 в соответствии с настоящим изобретением представлен как зажим для захвата топливных элементов, но его можно использовать также по другому назначению, где необходимо застопорить губки зажима на захваченном им элементе.







Изобретение относится к манипулированию топливом в ядерном реакторе. Устройство захвата топливных элементов выполнена таким образом, что его можно толкать в горизонтальном положении и отсоединять от погрузочно-разгрузочной системы в случае неисправности. При этом отсоединение позволяет высвободить груз, образованный топливными элементами и захватывающим их держателем, и переместить его в безопасное место. Изобретение касается также погрузочно-разгрузочной системы, способа перемещения топливных элементов в случае неисправности, а также соответствующего захватного зажима. Технический результат - повышение безопасности перегрузочных работ с ядерным топливом. 3 н. и 22 з.п. ф-лы, 9 ил.
1. Устройство (Р) для захвата топливных элементов, содержащее главную каретку (1) с продольной осью (XX'), зажим (6), соединенный с главной кареткой и выполненный с возможностью захвата головки топливных элементов, и вспомогательную каретку (2) с продольной осью (XX'), включающую в себя средства (20) крепления на подъемной/толкающей цепи, при этом главная и вспомогательная каретки соединены между собой средствами (170, 2; 171, 2121) передачи усилий, действующих на средства (20) крепления во время подъема устройства или во время действия на него горизонтального толкающего усилия, причем средства передачи усилия установлены между главной и вспомогательной каретками с возможностью отсоединения, так что разъединение главной каретки с вспомогательной кареткой осуществляется при заблокированной в своих креплениях вспомогательной каретке путем отсоединения средств передачи усилия от кареток путем однократного тянущего или толкающего движения главной каретки (1), при этом тянущее движение направлено в сторону вспомогательной каретки (2).
2. Устройство (Р) по п.1, в котором восстановление соединения главной каретки (1) с вспомогательной кареткой (2) происходит при заблокированной в своих креплениях (20) вспомогательной каретке путем однократного тянущего или толкающего движения главной каретки (1), при этом толкающее усилие направлено в сторону вспомогательной каретки (2).
3. Устройство (Р) по п.1, в котором средства (170, 2; 171, 2121) передачи усилий при разъемном соединении между главной и вспомогательной каретками содержат первый запирающий элемент (170), установленный на главной каретке (1) с возможностью поворота в направлении, поперечном к продольной оси (XX'), и упора во вспомогательную каретку (2) для обеспечения передачи усилий, действующих на средства крепления во время горизонтального толкания, второй запирающий элемент (171), установленный с возможностью поворота перпендикулярно к продольной оси (XX') и упора (2121) во вспомогательную каретку для обеспечения передачи усилий, действующих на средства (20) крепления во время подъема; при этом тянущее усилие, действующее на главную каретку, обеспечивает поворот первого запирающего элемента (170), относительное движение главной каретки в сторону вспомогательной каретки и последующий поворот второго запирающего элемента, причем как повернутый первый запирающий элемент, так и повернутый второй запирающий элемент остаются в положении, свободном от какого-либо упора во вспомогательную каретку.
4. Устройство (Р) по п.2, в котором средства (170, 2; 171, 2121) передачи усилий при разъемном соединении между главной и вспомогательной каретками содержат первый запирающий элемент (170), установленный на главной каретке (1) с возможностью поворота в направлении, поперечном к продольной оси (XX'), и упора во вспомогательную каретку (2) для обеспечения передачи усилий, действующих на средства крепления во время горизонтального толкания, второй запирающий элемент (171), установленный с возможностью поворота перпендикулярно к продольной оси (XX') и упора (2121) во вспомогательную каретку для обеспечения передачи усилий, действующих на средства (20) крепления во время подъема; при этом тянущее усилие, действующее на главную каретку, обеспечивает поворот первого запирающего элемента (170), относительное движение главной каретки в сторону вспомогательной каретки и последующий поворот второго запирающего элемента, причем как повернутый первый запирающий элемент, так и повернутый второй запирающий элемент остаются в положении, свободном от какого-либо упора во вспомогательную каретку.
5. Устройство (Р) по любому из пп.1-4, в котором главная каретка содержит две жесткие части (9, 10, 11, 12; 16, 17), соединенные между собой гибким соединением, из которых одна часть (9, 10, 11, 12) соединена с зажимом (6) и содержит электронные весы (15), позволяющие электрически контролировать усилия растяжения или сжатия, действующие на указанную жесткую часть (9, 10, 11, 12), на которой установлен зажим (6), а другая часть (16, 17) содержит каретку (17), называемую головной, соединенную с вспомогательной кареткой (2), и захватное гнездо (161), при помощи которого осуществляется разъединение при тянущем/толкающем движении между головной и вспомогательной каретками (17, 2).
6. Устройство (Р) по любому из пп.1-4, в котором главная каретка содержит электрический двигатель (9) и установленный с возможностью поступательного перемещения полый вал (11, 12), один из концов которого связан посредством редуктора (91) типа винт/гайка с электрическим двигателем, а другой его конец (120) опирается на часть (611) захватных губок (61) зажима (6), при этом приведение в действие электрического двигателя (9) приводит к поступательному движению вала (12) в одном направлении и одновременно к сдвиганию или раздвиганию захватных губок (61) зажима (6) путем их перемещения перпендикулярно к продольной оси (XX').
7. Устройство (Р) по п.5, в котором главная каретка содержит электрический двигатель (9) и установленный с возможностью поступательного перемещения полый вал (11, 12), один из концов которого связан посредством редуктора (91) типа винт/гайка с электрическим двигателем, а другой его конец (120) опирается на часть (611) захватных губок (61) зажима (6), при этом приведение в действие электрического двигателя (9) приводит к поступательному движению вала (12) в одном направлении и одновременно к сдвиганию или раздвиганию захватных губок (61) зажима (6) путем их перемещения перпендикулярно к продольной оси (XX').
8. Устройство (Р) по п.6, содержащее соединительный рычаг (10), закрепленный на главной каретке (1) и выполненный с возможностью сообщения поступательного перемещения валу (11, 12) и для его отсоединения от зажима, при этом рычаг выполнен с возможностью управления им при помощи дистанционных средств.
9. Устройство (Р) по п.7, содержащее соединительный рычаг (10), закрепленный на главной каретке (1) и выполненный с возможностью сообщения поступательного перемещения валу (11, 12) и для его отсоединения от зажима, при этом рычаг выполнен с возможностью управления им при помощи дистанционных средств.
10. Устройство (Р) по п.6, в котором зажим (6) содержит корпус (60), на котором с возможностью поворота установлены захватные губки (61) и с возможностью скольжения вдоль оси (XX') между губками (61) установлен шток (62), при этом внутри полого вала (12) закреплен стержень (120), опирающийся на шток (62) зажима, при этом длина штока зажима выбрана так, чтобы в одном из крайних положений губок зажима, сдвинутом или раздвинутом, соответствующем положению захвата головки топливных элементов, эта головка и шток зажима входили между собой в прямой контакт.
11. Устройство (Р) по любому из пп.7-9, в котором зажим (6) содержит корпус (60), на котором с возможностью поворота установлены захватные губки (61) и с возможностью скольжения вдоль оси (XX') между губками (61) установлен шток (62), при этом внутри полого вала (12) закреплен стержень (120), опирающийся на шток (62) зажима, при этом длина штока зажима выбрана так, чтобы в одном из крайних положений губок зажима, сдвинутом или раздвинутом, соответствующем положению захвата головки топливных элементов, эта головка и шток зажима входили между собой в прямой контакт.
12. Устройство (Р) по п.10, в котором стержень, закрепленный внутри полого вала (12), содержит выступ (7а), проходящий поперечно к оси (XX'), образуя флажок, а главная каретка (1) содержит первый датчик (8а) положения, расположенный напротив флажка (7а) для электрического обнаружения прямого контакта между головкой топливных элементов и штоком зажима.
13. Устройство (Р) по п.11, в котором стержень, закрепленный внутри полого вала (12), содержит выступ (7а), проходящий поперечно к оси (XX'), образуя флажок, а главная каретка (1) содержит первый датчик (8а) положения, расположенный напротив флажка (7а) для электрического обнаружения прямого контакта между головкой топливных элементов и штоком зажима.
14. Устройство (Р) по любому из пп.8-10, 12, 13, в котором главная каретка содержит фиксаторы (111), установленные с возможностью поворота поперечно к продольной оси (XX'), корпус зажима (6) содержит стенку (600) с уступами (600d), а вал (12) содержит закрепленные на его периферии рельефные элементы (110), при этом при повороте фиксаторов (111) рельефными элементами (110) и опоре повернутых фиксаторов (111) на уступы (600d) корпуса (60) зажима (6) зажим (6) и вал (12) оказываются соединенными.
15. Устройство (Р) по п.11, в котором главная каретка содержит фиксаторы (111), установленные с возможностью поворота поперечно к продольной оси (XX'), корпус зажима (6) содержит стенку (600) с уступами (600d), а вал (12) содержит закрепленные на его периферии рельефные элементы (110), при этом при повороте фиксаторов (111) рельефными элементами (110) и опоре повернутых фиксаторов (111) на уступы (600d) корпуса (60) зажима (6) зажим (6) и вал (12) оказываются соединенными.
16. Устройство (Р) по п.14, в котором средством стопорения соединения между главной кареткой (1) и зажимом (6) является шип (64), расположенный в стенке (600) корпуса (60) зажима (6) поперечно к продольной оси (XX') главного корпуса и обеспечивающий блокировку поступательного перемещения одного (1) относительно другого (6), при этом шип (64) выполнен с возможностью извлечения при помощи дистанционных средств.
17. Устройство (Р) по п.15, в котором средством стопорения соединения между главной кареткой (1) и зажимом (6) является шип (64), расположенный в стенке (600) корпуса (60) зажима (6) поперечно к продольной оси (XX') главного корпуса и обеспечивающий блокировку поступательного перемещения одного (1) относительно другого (6), при этом шип (64) выполнен с возможностью извлечения при помощи дистанционных средств.
18. Устройство (Р) по п.14, в котором полый вал (12) содержит выступ (7а), который проходит поперечно к оси (XX'), образуя флажок, а главная каретка (1) содержит первый и второй датчики (8а, 8b) положения, каждый из которых находится напротив флажка (7а) в данном положении при поступательном перемещении полого вала (12) для электрического обнаружения данного положения при поступательном перемещении рельефных элементов (110) и, следовательно, обнаружения поворота или отсутствия поворота фиксаторов (111).
19. Устройство (Р) по любому из пп.15-17, в котором полый вал (12) содержит выступ (7а), который проходит поперечно к оси (XX'), образуя флажок, а главная каретка (1) содержит первый и второй датчики (8а, 8b) положения, каждый из которых находится напротив флажка (7а) в данном положении при поступательном перемещении полого вала (12) для электрического обнаружения данного положения при поступательном перемещении рельефных элементов (110) и, следовательно, обнаружения поворота или отсутствия поворота фиксаторов (111).
20. Устройство (Р) по п.18, в котором корпус (60) зажима (6) содержит выступ, проходящий поперечно к оси (XX'), образуя флажок (7b), причем главная каретка (1) содержит третий датчик (8с) положения, который после соединения зажима (6) с главной кареткой оказывается напротив флажка (7b), электрически обнаруживая присутствие зажима (6).
21. Устройство (Р) по п.19, в котором корпус (60) зажима (6) содержит выступ, проходящий поперечно к оси (XX'), образуя флажок (7b), причем главная каретка (1) содержит третий датчик (8с) положения, который после соединения зажима (6) с главной кареткой оказывается напротив флажка (7b), электрически обнаруживая присутствие зажима (6).
22. Погрузочно-разгрузочная система (S) для загрузки и выгрузки топливных элементов, содержащая поворотный мост, содержащий желоб (5), в котором установлены каретки (1, 17; 2) устройства захвата (Р) по любому из пп.1-21, погрузочно-разгрузочную систему, содержащую цепь подъема/толкания, часть которой связана со средствами (20) крепления вспомогательной каретки (2) устройства захвата (Р) по любому из пп.1-21, при этом цепь подъема/толкания обеспечивает возможность перемещения с качением устройства захвата в горизонтальном положении наружу желоба поворотного моста.
23. Способ перемещения топливных элементов, согласно которому в случае возникновения неисправности во время рабочей операции перемещения часть (1, 16, 17) устройства захвата топливных элементов соединяют с аварийными механическими средствами перемещения, при этом часть (1, 16, 17) устройства захвата, соединенную с аварийными механическими средствами, отсоединяют при помощи дистанционных средств от остальной части (2, 20) устройства захвата, соединенной с рабочими механическими средствами перемещения.
24. Способ перемещения по п.23, согласно которому операцией перемещения является либо подъем, либо поворот относительно горизонтали, либо горизонтальное толкание.
25. Способ по любому из пп.23 или 24, согласно которому приведение в действие дистанционных средств приводит к единому движению натяжения-толкания, отсоединяющему одну (1, 16, 17) от другой (2) части (1, 16, 17; 2) устройства захвата.
| ГИДРОНАСОС | 0 |
|
SU390303A1 |
| Дистанционный захват | 1984 |
|
SU1195828A1 |
| Автоматический захват для транспортировки тепловыделяющих сборок ядерных реакторов | 1972 |
|
SU494980A1 |
| KR 20040011309 A, 05.02.2004. | |||

