Изобретение относится к транспортным средствам высокой проходимости, а именно к конструкции рулевого управления шагающих машин.
Известно многоопорное шагающее транспортное средство, содержащее ортогональные шагающие опоры, направляющие которых смонтированы с возможностью поворота вокруг вертикальных осей, причем указанный привод вращения выполнен в виде цепной передачи с некруглыми звездочками (см. А.с. СССР №821282, В 62 D 57/02).
Технический недостаток известного шагающего транспортного средства то, что конструкция не обеспечивает движение концов опор по кривым, близким к окружности заданного радиуса поворота, а лишь по касательным к ней, что приводит к повышенному скольжению опор. Кроме того, направляющие сильно нагружены, что делает цепную передачу тяжелой и требует мощного привода для управления поворотом машины.
Известна также шагающая машина с парной походкой и с опорами, каждая из которых содержит стойку с приводным кривошипом, верхний конец которой подвижно установлен в направляющей, подъемный кривошип и реверсивный привод поворота с рычагом управления (см. RU 2171194 С1, В 62 D 57/032 от 27.07.2001).
Технические недостатки указанного устройства:
- велико скольжение опор по грунту (разница между идеальной окружностью поворота и кривой, по которой движется опора);
- большое количество механизмов поворота (равного числу опор);
- делает систему управлений сложной и ненадежной;
- большая часть приводов поворота не использует своего диапазона полностью даже при минимальном радиусе поворота опоры, т.к. требуемое поперечное отклонение опор разное, а приводы поворота на всех опорах одинаковые;
- соединение между собой управляющих рычагов приводов поворота посредством рулевой трапеции вносит накопленную погрешность в систему управления (т.к. управляющий рычаг определяет радиус поворота опоры, то для разных опор - разные по величине рычаги управления, а для их соединения нужна трапеция).
Техническая задача: повышение экономичности и надежности. Сущность предлагаемого технического решения состоит в том, что в шагающей машине с парной походкой и с не менее шестью опорами, каждая из которых содержит стойку с приводным кривошипом, верхний конец которой подвижно установлен в направляющей, подъемный кривошип и реверсивный привод поворота с рычагом управления, указанный верхний конец стойки выполнен в виде поршня, навальцованного на сферу, и подвижно установлен в качающейся поперек машины цилиндрической направляющей, установленной на рычажном параллелограммном механизме, содержащем кронштейн и четыре рычага, одна пара осей которых связана с кронштейном, а другая - с направляющей, причем через пару осей, связанных с кронштейном, пропущен качающийся приводной вал от механизма поворота, при этом реверсивный привод поворота машины выполнен из двух реверсивных приводов механизмов поворота, каждый из которых связан с качающимися рычажными механизмами половины опор общим качающимся приводным валом и имеет общий рычаг управления, при этом рычаги рычажных механизмов установлены в среднем положении под углом к вертикали машины, равным

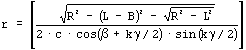
а размер каждого из них равен
где

R - минимальный радиус поворот опоры, L- расстояние от среднего положения опоры до середины базы машины, В - полуразмах шагающей опоры движителя, γ - полуразмах приводного кривошипа стойки, С - отношение длины нижней части стойки, от крепления приводного кривошипа, к длине верхней ее части, k - передаточное отношение механизма поворота, k=1.
Независимый привод механизма поворота позволяет избежать циркуляции мощности, которая характерна для прототипа; где энергия от основного привода разделяется на два потока - на продольное движение опоры и, через механизм поворота, на наклон ее, а затем вновь соединяется на опоре.
Введение общего (единого) для половины опор механизма поворота позволяет работать на максимальном диапазоне его (при минимальном радиусе поворота машины), в отличие от прототипа, где крайние опоры (с максимальным боковым отклонением) использовали весь диапазон механизма поворота, а средние лишь малую его часть. Кроме того, общий элемент привода - качающийся вал - исключает ошибку управления, накапливающуюся в прототипе при переходе от одной опоры (ее механизма поворота) к следующей. Повышение точности работы опоры ведет к уменьшению скольжения ее по грунту и повышению экономичности машины.
Одно из главных достоинств устройства - это простота и надежность
- единый связывающий элемент (качающийся вал), который соединяет качающиеся механизмы половины опор и от общего для этих опор реверсивного привода поворота.
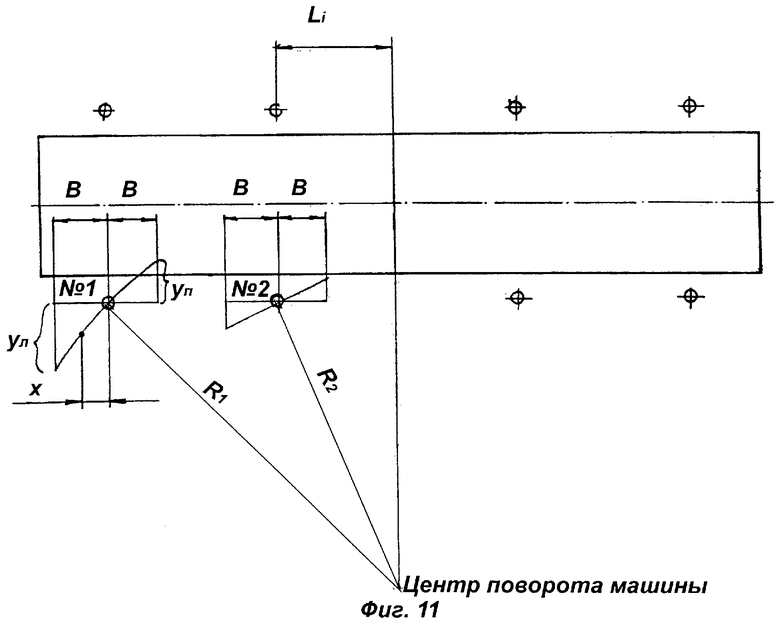
Для задачи преимущественного поворота в одну сторону (например, шагающие дождевальные машины) наклон в среднем положении рычажного механизма на угол β позволяет обеспечить требуемое соотношение уП/уЛ, где уП - требуемое боковое отклонение опоры от среднего положения в конце трека при движении по идеальной окружности, уЛ - то же, но в начале трека.
Указанная система управления применима для шагающих машин с парными походками (с не менее шестью опорами) - например, трешками - для 6-опорной машины, четверками - для 8-ми опорной машины и т.д.
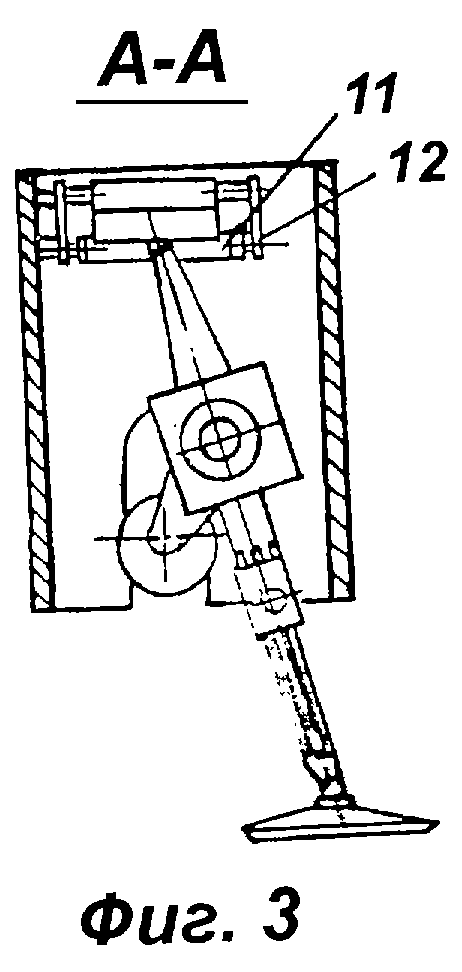
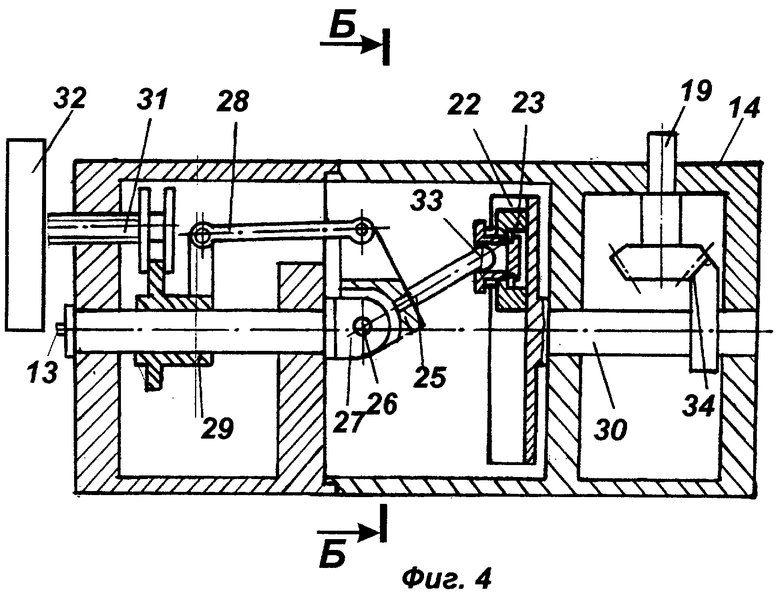
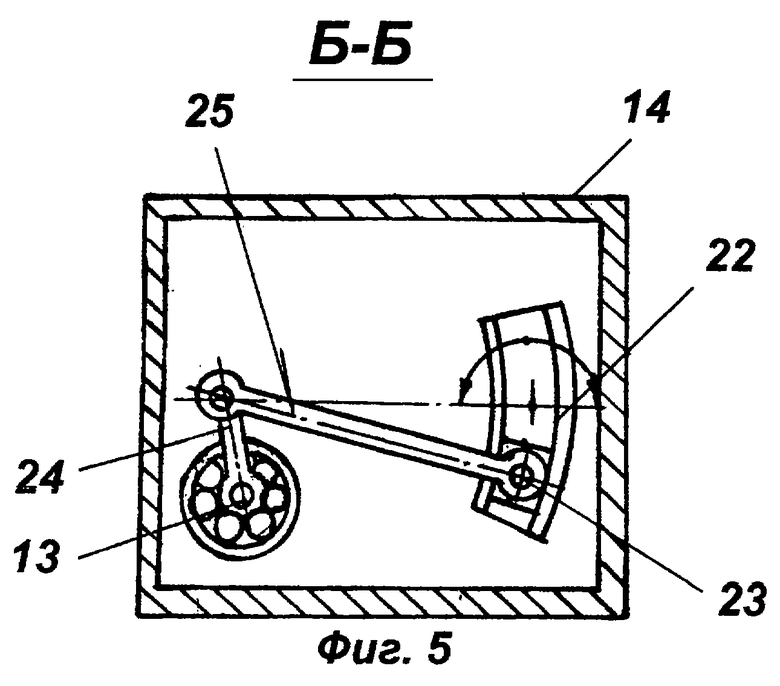
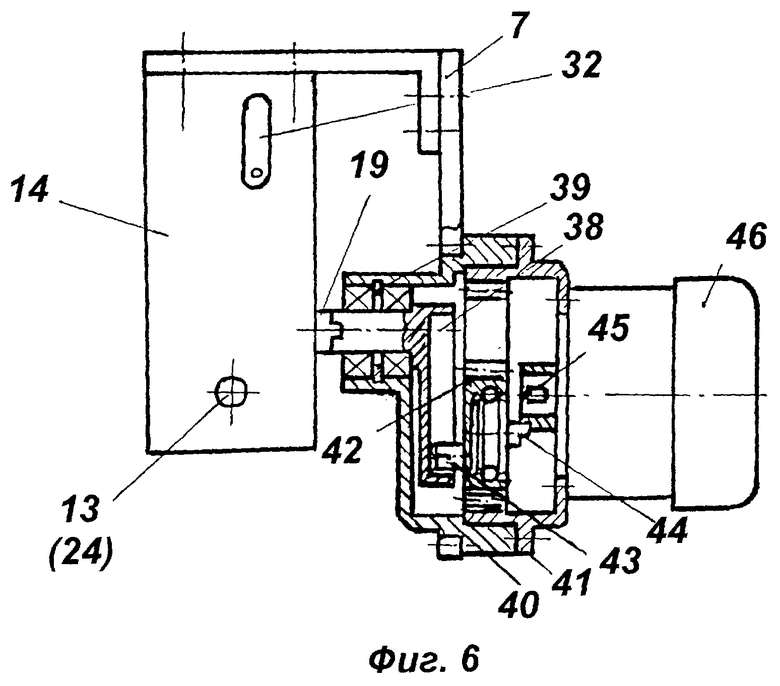
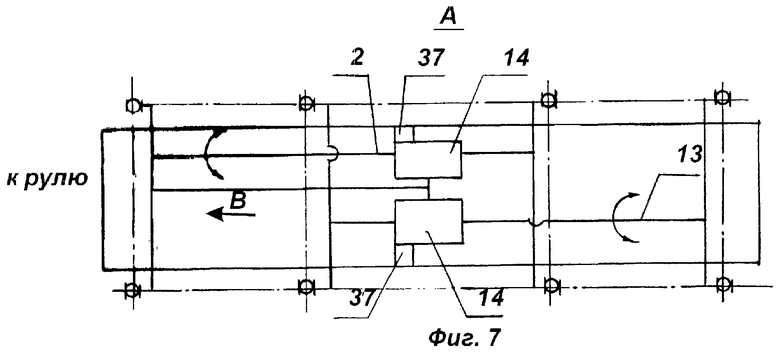
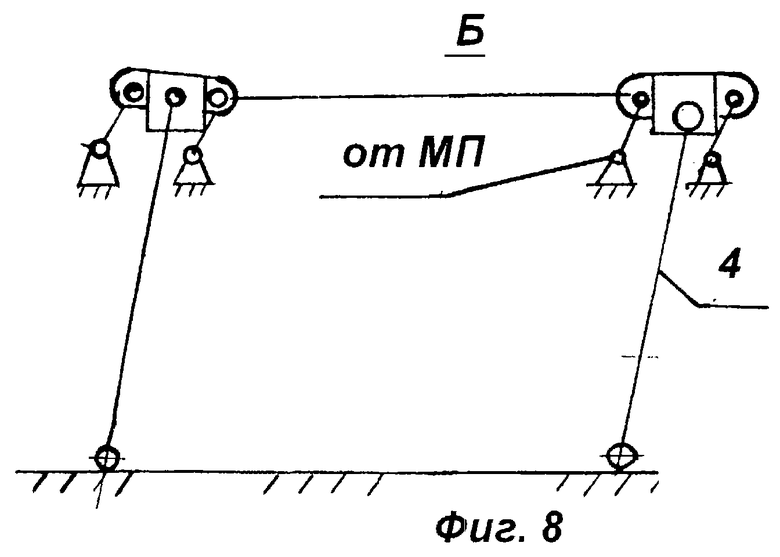
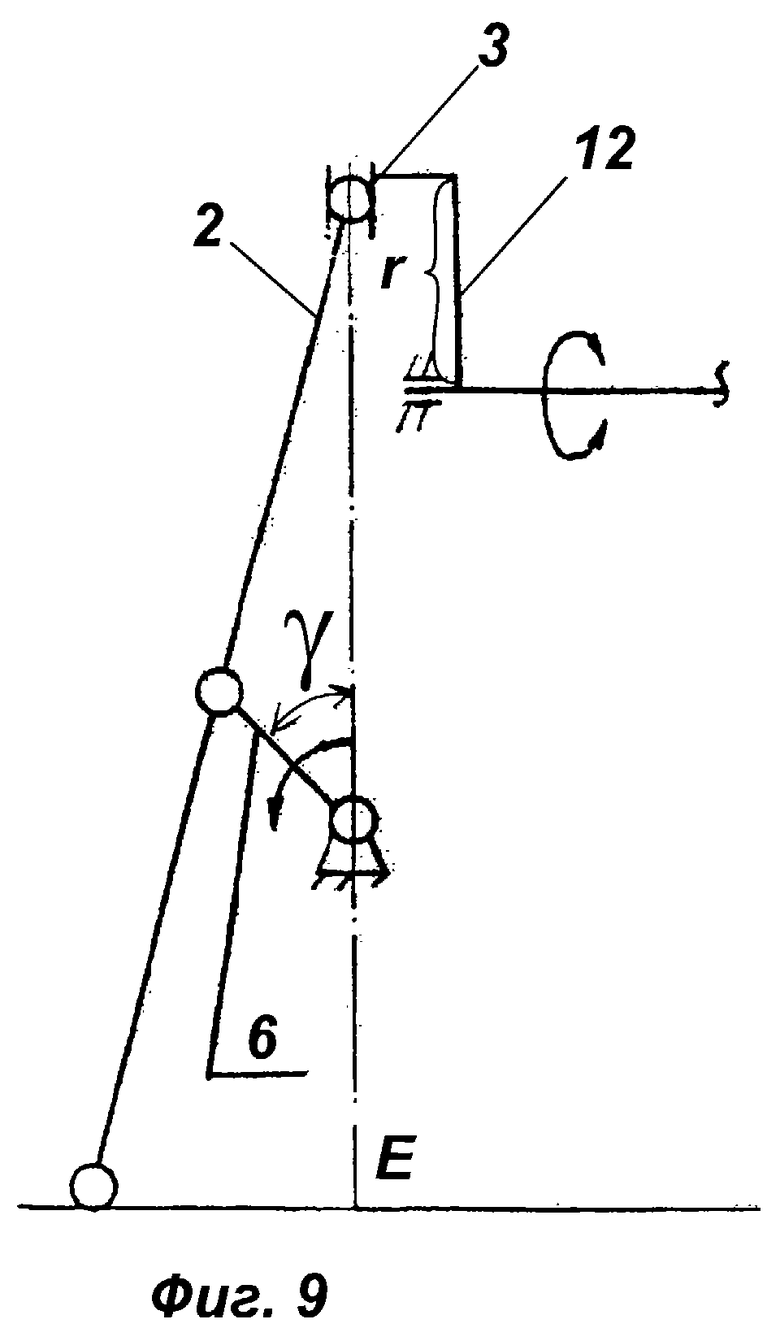
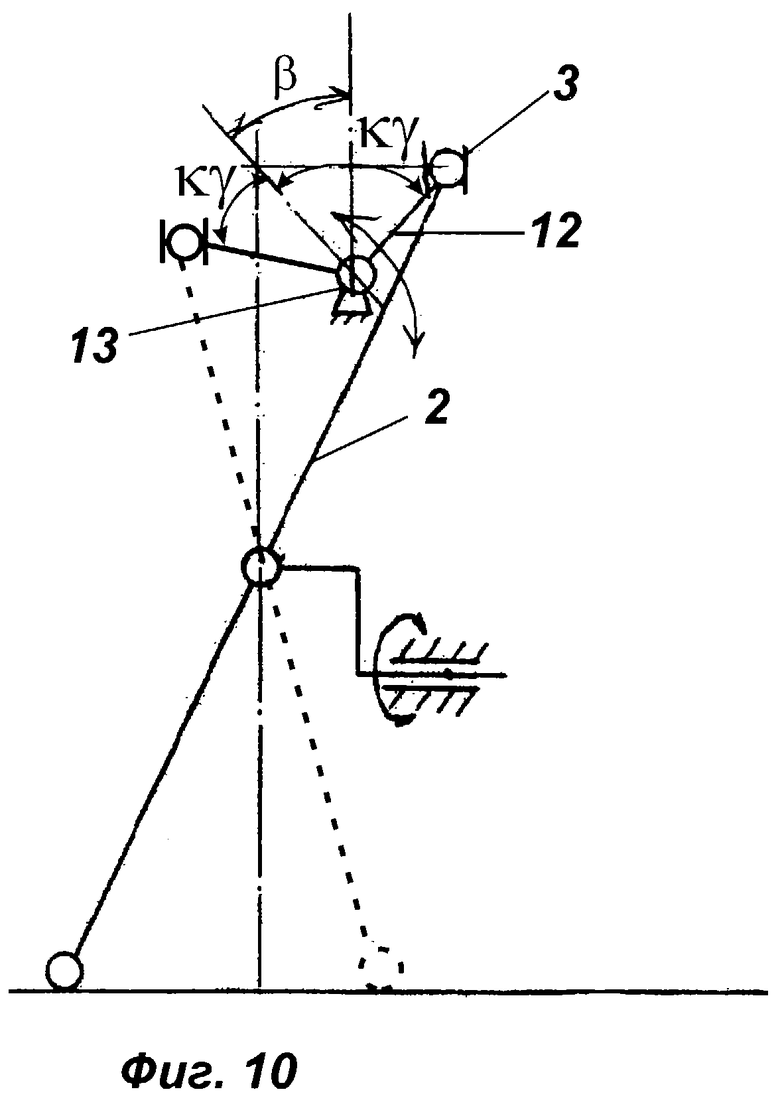
На фиг.1 изображена система управления поворотом. На фиг.2 - общий вид опоры - стойки с приводом. На фиг.3 - сечение А-А на фиг.2. На фиг.4 - механизм поворота. На фиг.5 - сечение Б-Б на фиг.4. На фиг.6 - привод механизма поворота. На фиг.7 - вид А на фиг.2. На фиг.8 - вид Б на фиг.7. На фиг.9 - схема опоры стойки с приводом. На фиг.10 вид В - на фиг.9. На фиг.11 - схема к расчету шагающего механизма.
Шагающий движитель содержит опорную пяту 1, шарнирно соединенную с вертикальной качающейся стойкой 2, связанной через ползун 3, сидящий на шлицах стойки 2, с приводным кривошипом 4.
Вертикальная стойка 2 шарнирно соединена с шейкой подъемного кривошипа 5, который своим валом подвижно установлен в вертикальной направляющей 6, выполненной в виде паза в корпусе 7. Верхний конец вертикальной стойки 2, выполненный в виде поршня 8, навальцованного на сферу 9, подвижно установлен в цилиндрической качающейся (поперек машины) направляющей 10.
Направляющая 10 установлена на рычажном параллелограммом механизме, содержащем кронштейн 11, жестко закрепленный на корпусе 7, и рычаги 12 (четыре штуки), одна ось которых связана с кронштейном 11, а другая - о направляющей 10. Через одну пару осей, связанных с кронштейном 11, пропущен приводной вал 13 от механизма поворота 14. Размеры рычагов 12 пропорциональны расстоянию данной опоры относительно середины базы машины. На валу 15 кривошипа 4 установлены кулачки 16, которые контактируют с выключателями 17 и 18, управляя подъемом стойки 2.
Механизм поворота 14 содержит входной вал 19, который соединен с кулисой 22, в пазу которой установлен ползун 23. В зависимости от положения ползуна 23 относительно оси качания кулисы 22 рычаг 24 меняет амплитуду и фазу колебаний, что определяет поворот налево или направо всей машины.
Рычаг 24 жестко связан (заштифтован) с приводным валом 13 (общим для половины опор машины находящихся в одной фазе). Для передвижения ползуна имеется механизм, состоящий из рычага 25, оси 26, вала 27, тяги 28, втулки 29, соосной с осью 30 качания кулисы 22, приводного винта 31 и управляющего рычага 32, причем рычаг 24 соединен с камнем-ползуном 23 тягой 33. Входной вал 19 соединен с валом 30 через зубчатую пару 34. Стойка 2 соединена через сферический шарнир 35 с шейкой кривошипа 5, вал которого соединен с реверсивным силовым приводом 36, управляемым выключателями 17 и 18.
Электромеханический привод кулисного типа 37 механизма поворота 14 может быть выполнен различным образом, например в виде механизма по а.с. 1293933. Кулиса 38 механизма установлена в подшипниках 39 в корпусе 40, жестко закрепленном на раме. В корпусе 40 жестко установлено коронное колесо 41, в зацепление с которым входит сателлит 42, содержащий эксцентрично расположенный ползун 43, сопрягающийся с кулисой 38. Сателлит 42 шарнирно связан с водилом 44, установленным на выходном валу 45 электродвигателя 46 вращения. Ось кулисы 38 жестко связана с входным валом 19 механизма поворота 14.
Шагающая машина работает следующим образом.
Кривошип 4, равномерно вращаясь, качает стойку 2 и кривошип 5. Опора при этом перемещается равномерно по прямой. Кулачки 16 дают команду приводу 36 на подъем и опускание. Для поворота машины стойку 2 необходимо наклонять в поперечной плоскости вокруг шарнира 35 путем воздействия на сферу 9 через направляющую 10 рычагом 12. Рычаги 12 опор жестко связаны с приводным валом 13 механизма поворота 14. Величина наклона стойки 2 (а значит радиус и направление поворота машины) определяется наклоном рычага 12 (рычаги рычажных механизмов установлены в среднем положении под углом
 ,
,
амплитуда и фаза которого определяется положением управляющего рычага 32 механизма поворота 14.
Так как у всех стоек машины рычаги 12 разные
где
R - минимальный радиус поворот опоры, L- расстояние от среднего положения опоры до середины базы машины, В - полуразмах шагающего движителя, γ - полуразмах приводного кривошипа стойки, С - отношение длины нижней части стойки (от крепления приводного кривошипа) к длине верхней ее части, k - передаточное отношение механизма поворота), то и отклонение соответствует положению каждой опоры на машине. Имеется два механизма поворота (можно три и более, но это усложняет машину), что позволяет иметь парную походку - у 6-ногой машины трешками, у 8-ногой четверками и т.д.
Опоры, находящиеся в одной фазе, отклоняются рычагами 12 на разные боковые расстояния, но при этом угловые отклонения самих рычагов одинаковы для всех опор; что позволяет работать механизму поворота на максимальном диапазоне, а кроме того, общий приводной вал 13 позволяет избежать накопления ошибки в рулевом механизме.
Таким образом, привод поворота машины, выполненный из двух реверсивных приводов поворота, каждый из которых связан с рычагами рычажных механизмов половины опор общим качающимся валом и имеющих общий рычаг управления, а рычаги рычажных механизмов установлены в среднем положении под углом
к вертикали рамы машины и размеры их равны
позволяет:
- снизить (практически исключить) скольжение опоры по грунту за счет лучшего приближения к идеальной траектории путем более широкого использования диапазона работы механизма поворота при минимальных радиусах, а также за счет установки рычага рычажного механизма направляющей на угол β, ликвидации накопленной ошибки в рулевом механизме;
- упростить систему управления машиной за счет установки двух (только 2-х !) механизмов поворота.
Все это способствует повышению экономичности и надежности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009938C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ПРИВОД РЕМИЗНЫХ РАМ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ | 2000 |
|
RU2167964C1 |
| Многоопорный шагающий движитель | 1990 |
|
SU1801854A1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
Изобретение относится к транспортным средствам высокой проходимости, а именно к конструкции рулевого управления шагающих машин. Шагающая машина с парной походкой и с не менее шестью опорами включает стойку с приводным кривошипом, верхний конец которой установлен в направляющей, выполненной в виде рычажного качающегося механизма, подъемный кривошип, реверсивный привод поворота с рычагом управления, рулевой механизм, например, в виде рулевой трапеции. Привод поворота машины выполнен из двух реверсивных приводов поворота, каждый из которых связан с рычагами рычажных механизмов половины опор общим качающимся валом и имеет общий рычаг управления. Рычаги рычажных механизмов установлены в среднем положении под углом к вертикали машины, определяемым математическим выражением, приведенным в описании. Технический результат - повышение экономичности и надежности. 11 ил.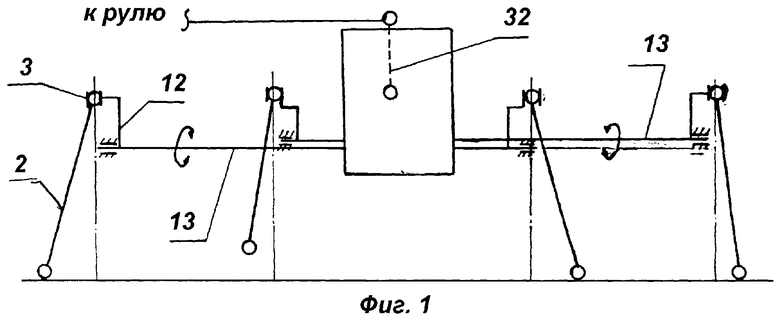
Шагающая машина с парной походкой и с не менее шестью опорами, каждая из которых содержит стойку с приводным кривошипом, верхний конец которой подвижно установлен в направляющей, подъемный кривошип и реверсивный привод поворота с рычагом управления, отличающаяся тем, что указанный верхний конец стойки выполнен в виде поршня, навальцованного на сферу, и подвижно установлен в качающейся поперек машины цилиндрической направляющей, установленной на рычажном параллелограммном механизме, содержащем кронштейн и четыре рычага, одна пара осей которых связана с кронштейном, а другая - с цилиндрической направляющей, причем через пару осей, связанных с кронштейном, пропущен качающийся приводной вал от механизма поворота, при этом реверсивный привод поворота машины выполнен из двух реверсивных приводов механизмов поворота, каждый из которых связан с качающимися рычажными механизмами половины опор общим качающимся приводным валом и имеет общий рычаг управления, при этом рычаги рычажных механизмов установлены в среднем положении под углом к вертикали машины, равным

а размер каждого из них равен
где

R - минимальный радиус поворот опоры, L - расстояние от среднего положения опоры до середины базы машины, В - полуразмах шагающей опоры движителя, γ - полуразмах приводного кривошипа стойки, С - отношение длины нижней части стойки от крепления приводного кривошипа к длине верхней ее части, k - передаточное отношение механизма поворота, k=1.
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2171194C1 |
| RU 94024222 А1, 27.07.1996 | |||
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2009936C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 5219410, 15.06.1993. | |||

