Способ относится к области военного дела, а именно, к маскировке подвижных объектов от систем космической гиперспектральной разведки, путем снижения в суммарно фиксируемом гиперспектральной камерой сигнале доли спектральных характеристик подвижного объекта. Технический результат - снижение вероятности обнаружения подвижного объекта системой космической гиперспектральной разведки.
Космическая гиперспектральная разведка относится к оптико-электронной разведке. В настоящее время линейное разрешение на местности гиперспектральных камер космического базирования превышает линейные размеры большинства разведываемых подвижных объектов, и в процессе космической гиперспектральной разведки решаются поисковые задачи для субпиксельных объектов [3]. Известно [1, 8, 9], что величина фиксируемого гиперспектральной камерой сигнала, включающего спектральные характеристики подвижного объекта и определенного участка подстилающей поверхности, имеет функциональную зависимость от линейного разрешения на местности и проекции на цифровом гиперспектральном изображении площади подвижного объекта. Данная функциональная зависимость определяется выражением [1, 8]:

где  -величина фиксируемого гиперспектральной камерой сигнала в одном пикселе цифрового гиперспектрального изображения;
-величина фиксируемого гиперспектральной камерой сигнала в одном пикселе цифрового гиперспектрального изображения;
γ - коэффициент, соответствующий площади участка разведываемой местности в одном пикселе цифрового гиперспектрального изображения, перекрываемой площадью проекции подвижного объекта на этом изображении;
 -векторы значений спектральных характеристик подвижного объекта и подстилающей поверхности, соответственно;
-векторы значений спектральных характеристик подвижного объекта и подстилающей поверхности, соответственно;
So - проекция на цифровом гиперспектральном изображении площади подвижного объекта, м2;
μ - линейное разрешение на местности гиперспектральной камеры космического аппарата, м.
Вероятность обнаружения подвижного объекта может быть рассчитана путем решения задачи статистической проверки параметрических гипотез с двумя альтернативами и зависит от величины фиксируемого гиперспектральной камерой сигнала  в одном пикселе цифрового гиперспектрального изображения [1, 5, 8].
в одном пикселе цифрового гиперспектрального изображения [1, 5, 8].
Большинство подвижных объектов имеют такие габаритные характеристики, которые позволяют сделать вывод о наличии определенной ориентации подвижного объекта относительно траектории пролета космического аппарата [9]. Под ориентацией подвижного объекта понимается угол между продольной осью подвижного объекта и проекцией трассы пролета космического аппарата на поверхность Земли.
Известен «Способ скрытия мобильного объекта от радиолокационного наблюдения из космоса» [6] - аналог, основанный на перемещении наземного мобильного объекта по маршруту движения с использованием зон скрытия.
Недостатком реализации данного способа является то, что возможности способа используются не в полной мере, а именно рассчитывают ориентацию и размеры зон скрытия - зон радиолокационных наложений и радиолокационных теней только на маршруте движения [6], не осуществляется определение рационального расположения подвижного объекта в месте выполнения задач относительно трассы пролета космического аппарата и его возможностей по обнаружению.
Наиболее близким к заявленному способу является «Способ снижения заметности подвижного объекта для оптико-электронных систем наблюдения из космоса» [7] - прототип, основанный на перемещении наземного подвижного объекта по маршруту движения с учетом маскирующих свойств местности с учетом проведения количественных оценок излучательно-отражательных характеристик подстилающей поверхности и характеристик зон оптической невидимости для обеспечения рационального использования маскирующих свойств местности на маршруте движения подвижного объекта.
Недостатком реализации данного способа является то, что возможности способа используются не в полной мере, аналогично [6], а именно: на основании оценок излучательно-отражательных характеристик подстилающей поверхности и характеристик зон оптической невидимости определяют места с наибольшими возможностями использования маскирующих свойств местности только на маршруте движения [7], не осуществляется определение рационального расположения подвижного объекта в месте выполнения задач относительно трассы пролета космического аппарата и его возможностей по обнаружению.
Общим существенным признаком известного и заявленного способа является проведение количественной оценки суммарно фиксируемого гиперспектральной камерой сигнала, включающего спектральные характеристики (излучательно-отражательные) подвижного объекта.
Требуемым техническим результатом заявленного способа является снижение заметности подвижных объектов в местах выполнения задач с помощью приемов организационной маскировки, как следствие - снижение вероятности обнаружения подвижных объектов системами космической гиперспектральной разведки.
Достижение технического результата заявленного способа обеспечивается расчетом варианта ориентации подвижного объекта на местности относительно возможных траекторий пролетов космических аппаратов, минимизирующего площадь проекции подвижного объекта на цифровом гиперспектральном изображении, и в соответствии с рассчитанным вариантом размещением подвижного объекта в месте выполнения задач.
Технический результат достигается путем ориентации подвижного объекта относительно трассы пролета космического аппарата, обеспечивающей его минимальную площадь проекции на цифровом гиперспектральном изображении.
Заявленный способ характеризуется следующей последовательностью действий.
I. Расчет варианта ориентации подвижного объекта на местности относительно возможных траекторий пролетов космических аппаратов.
На основе параметров возможных траекторий пролетов космических аппаратов гиперспектральной разведки и характеристик возможных пространственных положений подвижного объекта рассчитывается множество возможных вариантов проекции на цифровом гиперспектральном изображении площади подвижного объекта, определяемое выражением:

где So - проекция на цифровом гиперспектральном изображении площади
подвижного объекта, м2;
h - высота подвижного объекта, м;
d - ширина подвижного объекта, м;
 - длина подвижного объекта, м;
- длина подвижного объекта, м;
ϕ - угол визирования подвижного объекта гиперспектральной камерой, град;
α - угол ориентации подвижного объекта относительно траектории пролета космического аппарата, град.
На основе множества полученных значений площади проекции на цифровом гиперспектральном изображении определяется α* - угол ориентации подвижного объекта относительно траектории пролета космического аппарата, обеспечивающий его минимальную площадь проекции с учетом пространственных характеристик местности и удовлетворяющий выражению:

На основе рассчитанного значения угла α* определяют возможный вариант размещения подвижного объекта в месте выполнения задач.
II. Размещение подвижного объекта в месте выполнения задач в соответствии с рассчитанным вариантом.
Подвижный объект в месте выполнения задач ориентируется таким образом, чтобы угол между продольной осью подвижного объекта и проекцией трассы пролета космического аппарата на поверхность Земли соответствовал расчетному значению.
Сущность изобретения поясняется чертежами.
На фиг.1 приведено взаимное расположение космического аппарата и подвижных объектов, где:
1 - подвижный объект;
2 - космический аппарат;
3 - трасса пролета космического аппарата.
На фиг. 2 приведены расчетные значения математического моделирования изменения проекции на цифровом гиперспектральном изображении площади подвижного объекта.
На фиг. 3 приведены расчетные значения математического моделирования изменения значений вероятности обнаружения подвижного объекта.
Способ снижения заметности подвижного объекта для систем космической гиперспектральной разведки реализуется следующим образом. Для каждого места выполнения задач осуществляется расчет варианта размещения подвижного объекта, обеспечивающего его минимальную площадь проекции на цифровом гиперспектральном изображении. Ориентируют подвижный объект в соответствии с рассчитанным вариантом и размещают в месте выполнения задач.
Достижение технического результата заявленного способа и эффективность его применения подтверждается следующим:
ориентирование подвижного объекта относительно трассы пролета космического аппарата возможно без дополнительных ресурсных затрат;
ориентация подвижного объекта, обеспечивающая его минимальную площадь проекции на цифровом гиперспектральном изображении, снижает величину суммарно фиксируемого гиперспектральной камерой сигнала, что позволяет снизить вероятность обнаружения подвижного объекта системами космической гиперспектральной разведки;
снижение доли спектральных характеристик подвижного объекта в суммарно фиксируемом гиперспектральной камерой сигнале осуществляется приемами организационной маскировки без дополнительных временных и ресурсных затрат;
заявленный способ решает задачу обоснования и выбора оптимального варианта размещения подвижного объекта в месте выполнения задач, обеспечивая рациональное использование возможных условий взаимного расположения космического аппарата и подвижного объекта для осуществления противодействия системам космической гиперспектральной разведки.
Для подтверждения технического результата заявленного способа, на фиг. 2 и фиг. 3 приведены расчетные значения математического моделирования на основе [1, 5] для следующих исходных данных: h - 3 м, d -2 м,  φ - 20°…160° град, α - 0°…360° град, спектральные характеристики подвижного объекта накрытого маскировочной сеткой [5, 4], подстилающей поверхности - хвойного леса [4], характеристики космического аппарата гиперспектральной разведки - EO-1/Hyperion [2].
φ - 20°…160° град, α - 0°…360° град, спектральные характеристики подвижного объекта накрытого маскировочной сеткой [5, 4], подстилающей поверхности - хвойного леса [4], характеристики космического аппарата гиперспектральной разведки - EO-1/Hyperion [2].
Источники, принятые к рассмотрению
1. Боделан, И.П. Математическая модель оценки возможностей космических аппаратов гиперспектральной разведки по вскрытию субпиксельных объектов // I Всероссийская научная конференция ведущих научных школ в области радиолокации, радионавигации и радиоэлектронных систем передачи информации: сб. докл. - Томск: Изд-во Томск, гос. ун-та систем упр. и радиоэлектроники, 2019. - С. 122-127.
2. Данные по космическому аппарату EO-1/Hyperion/ALI https://archive.usgs.gov/archive/sites/eol.usgs.gov/sensors.html (07.07.2020 г.).
3. Журавель, Ю.Н., Федосеев, А.А. Особенности обработки гиперспектральных данных дистанционного зондирования при решении задач мониторинга окружающей среды // Компьютерная оптика. 2013. Т. 37, №4 С. 471-476.
4. Комарова, А.Ф., Журавлева, И.В., Яблоков, В.М. Открытые мультиспектральные данные и основные методы дистанционного зондирования в изучении растительного покрова // Принципы экологии. 2016. №1. с. 40-74.
5. Кузнецов, А.Ю., Сергеев, С.С. Анализ спектральных характеристик маскировочного покрытия с применением видеоспектрометра // Научно-технический вестник информационных технологий, механики и оптики. 2016. Т. 16, №2 С. 258-264.
6. Патент RU 2312297 от 08.06.2006 г.
7. Патент RU 2373481 от 24.03.2008 г.
8. Рыбьяк, А.С. Обнаружение субпиксельных объектов по спектральным признакам в ОЭС с использованием принципов динамической фильтрации // Развитие, боевое применение и вооружение РВ // Наука и техника ВС Украины. - Харьков: ХУВС им. И. Кожедуба, 2013. - С. 75-78.
9. Хорев, А.А. Теоретические основы оценки возможностей технических средств разведки. - М. МО РФ, 2000. - 255 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты от гиперспектральной разведки | 2023 |
|
RU2823600C1 |
| Способ противодействия много- и гиперспектральной разведке | 2019 |
|
RU2726745C1 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ВЕДЕНИЯ ВОЗДУШНОЙ РАДИАЦИОННОЙ РАЗВЕДКИ МЕСТНОСТИ ДИСТАНЦИОННЫМ МЕТОДОМ | 2010 |
|
RU2489804C2 |
| Способ оценки видимости наземного объекта из космоса | 2020 |
|
RU2751575C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| Способ маскировки объектов от много- и гиперспектральных средств разведки | 2018 |
|
RU2704147C1 |
| Многощелевая гиперспектральная камера с комбинированным отслеживанием изображения | 2016 |
|
RU2624622C1 |
Способ относится к области военного дела и касается способа снижения заметности подвижного объекта для систем космической гиперспектральной разведки. Способ заключается в том, что размещают подвижный объект в месте выполнения задач с учетом маскирующих свойств местности и на основе параметров возможных траекторий пролетов космических аппаратов и возможных характеристик пространственного расположения подвижного объекта рассчитывают вариант ориентации подвижного объекта на местности относительно возможных траекторий пролетов космических аппаратов, обеспечивающий минимальную площадь проекции подвижного объекта на цифровом гиперспектральном изображении. Технический результат заключается в снижении вероятности обнаружения подвижного объекта системой космической гиперспектральной разведки. 3 ил.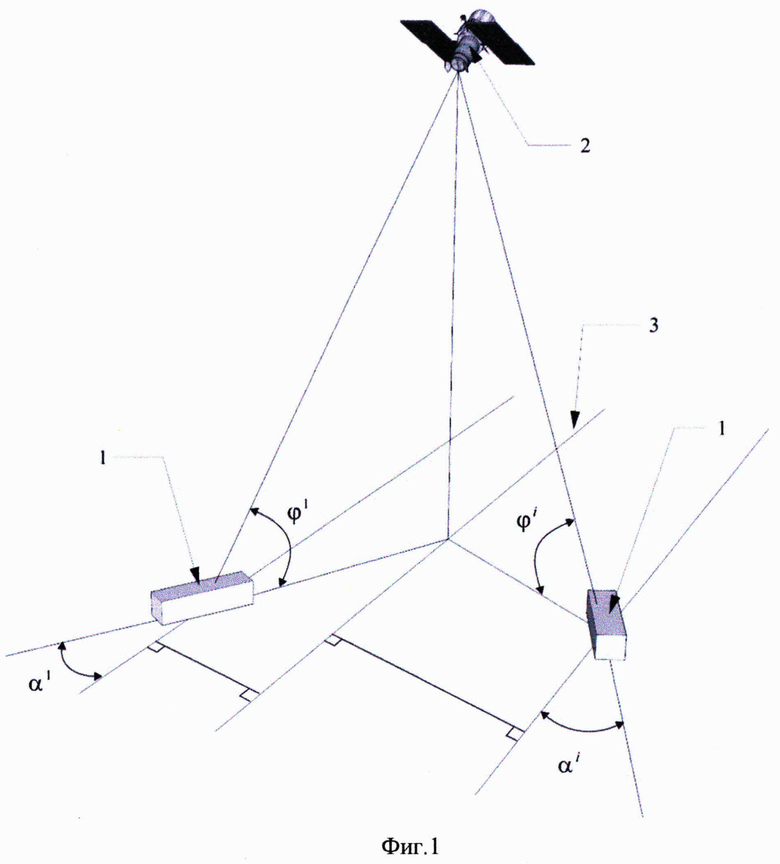
Способ снижения заметности подвижного объекта для систем космической гиперспектральной разведки, заключающийся в том, что размещают подвижный объект в месте выполнения задач с учетом маскирующих свойств местности, отличающийся тем, что на основе параметров возможных траекторий пролетов космических аппаратов и возможных характеристик пространственного расположения подвижного объекта рассчитывают вариант ориентации подвижного объекта на местности относительно возможных траекторий пролетов космических аппаратов, обеспечивающий минимальную площадь проекции подвижного объекта на цифровом гиперспектральном изображении, удовлетворяющую выражению:  где S0 - площадь проекции подвижного объекта на цифровом гиперспектралъном изображении, h, d,
где S0 - площадь проекции подвижного объекта на цифровом гиперспектралъном изображении, h, d,  -габаритные характеристики подвижного объекта, ϕ - угол визирования подвижного объекта гиперспектральной камерой, α - угол ориентации подвижного объекта относительно траектории пролета космического аппарата, а в соответствии с рассчитанным вариантом размещают подвижный объект в месте выполнения задач.
-габаритные характеристики подвижного объекта, ϕ - угол визирования подвижного объекта гиперспектральной камерой, α - угол ориентации подвижного объекта относительно траектории пролета космического аппарата, а в соответствии с рассчитанным вариантом размещают подвижный объект в месте выполнения задач.
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| СПОСОБ АДАПТИВНОЙ МАСКИРОВКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2009 |
|
RU2412421C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| US 5036211 A1, 30.07.1991. | |||

