Изобретение относится к области противорадиолокационной маскировки наземных мобильных объектов от космических систем радиолокационной разведки путем обеспечения их скрытности за счет исключения демаскирующих признаков защищаемого объекта при экранировании и переотражении электромагнитных волн естественными или искусственными масками местности.
Известен способ скрытия мобильных объектов от радиолокационного наблюдения, заключающийся в размещении наземных мобильных объектов в зоне радиолокационной тени, формируемой естественной маской местности в азимутальном направлении, противоположном азимутальному направлению радиолокационного наблюдения [1], при этом в качестве масок используются естественные объекты рельефа - обратные скаты высот, оврагов, балок, канав и другие неровности местности, а также сплошные заборы, насыпи, выемки, снежные валы, стога сена, скирды соломы. Радиолокационные тени - поля невидимости - образуются вследствие прямолинейного распространения радиоволн и их отражения от преграды. При этом способе ориентация зон радиолокационных теней зависит от азимутального направления радиолокационного наблюдения, а размер - от высоты неподвижного радиолокатора. При произвольном движении носителя радиолокатора или изменении положения неподвижного радиолокатора зоны радиолокационных теней будут изменять свои местоположение, размеры и ориентацию, что в указанном способе скрытия не учитывается.
Известен способ скрытия мобильных объектов от радиолокационного наблюдения, заключающийся в размещении наземных мобильных объектов в зоне радиолокационной тени, формируемой искусственной маской местности в азимутальном направлении, противоположном азимутальному направлению радиолокационного наблюдения [2], при этом в качестве масок для противодействия радиолокационному наблюдению, проводимому под настильными углами, используют вертикальные и наклонные маски-экраны из табельных маскировочных сетей или подручных средств с металлизированной сеткой. При произвольном движении носителя радиолокатора или изменении положения неподвижного радиолокатора зоны радиолокационных теней будут изменять свои местоположение, размеры и ориентацию, что в указанном способе скрытия не учитывается.
Известен способ скрытия мобильных объектов от радиолокационного наблюдения, выбранный в качестве прототипа [3] и заключающийся в перемещении наземных мобильных объектов по маршруту движения, прокладываемому в зонах радиолокационных теней (зонах скрытия), формируемых за искусственными и естественными масками местности в азимутальном направлении, противоположном азимутальному направлению радиолокационного наблюдения. При этом ориентация зон радиолокационных теней зависит от азимутального направления радиолокационного обзора (в прототипе - кругового обзора), а размер - от высоты неподвижного радиолокатора, т.е. местоположение, ориентация и размер зон радиолокационных теней при неподвижном радиолокаторе являются постоянными и определяются перепадом высот и местоположением объектов местности и направлением радиолокационного наблюдения - азимутом и углом места (аналогично - высотой расположения радиолокатора и дальности до него). При произвольном движении носителя радиолокатора или изменении положения неподвижного радиолокатора зоны радиолокационных теней будут изменять свои местоположение, размеры и ориентацию, что в указанном способе скрытия не учитывается.
Задача изобретения заключается в снижении уровня обнаружения и распознавания наземного мобильного объекта при радиолокационном наблюдении космическим радиолокатором с высоким пространственным разрешением путем их последовательного размещения в зонах радиолокационных теней и наложений, формируемых искусственными и естественными объектами, расположенными по маршруту движения объекта.
Для решения указанной задачи в предлагаемом способе скрытия наземного мобильного объекта, учитывающем временную дискретность радиолокационного наблюдения из космоса и взаимозависимость углов места и азимута его направления:
на основе априорно известных географического расположения маршрута движения объекта и параметров орбиты космического радиолокатора рассчитывают моменты времени пролета радиолокатором точек минимальной дальности до него и соответствующие им углы места и азимута;
на основе априорно известных параметров ориентации диаграммы направленности антенны космического радиолокатора определяют углы места и азимута направления радиолокационного наблюдения из множества углов места и азимута направлений на точки минимальной дальности до радиолокатора;
на основе априорно известных местоположения и высоты искусственных и естественных объектов участков местности, расположенных по маршруту движения, и углов места и азимута направления радиолокационного наблюдения для каждого выбранного момента пролета рассчитывают ориентацию и размеры зон скрытия - зон радиолокационных наложений и радиолокационных теней;
осуществляют выбор зон скрытия, обеспечивающих снижение уровня обнаружения и распознавания, с учетом габаритных размеров мобильного объекта;
осуществляют перемещение мобильного объекта по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора и остановку мобильного объекта в моменты пролетов в зонах скрытия, обеспечивающих заданный уровень снижения обнаружения и распознавания - преимущественно в зонах радиолокационных теней при малых углах места направления радиолокационного наблюдения и в зонах радиолокационных наложений - при больших углах места.
Общими чертами возникновения радиолокационных теней за искусственными и естественными объектами местности являются перепад высот и предполагаемое прямолинейное распространение радиоволн от радиолокатора как источника излучения, описываемое углами азимута и места, при этом маскировочный эффект достигается, если высота объекта маскировки ниже по высоте объекта местности. Радиолокационные тени отображаются на радиолокационном изображении (РЛИ) темными участками (фиг.1), при размещении в них объекты не обнаруживаются. Зоны радиолокационных наложений формируются перед искусственными и естественными объектами местности при попадании в один отсчет по дальности отражений от нескольких объектов, находящихся на одинаковой дальности от радиолокатора, и проявляются в виде увеличения яркости элемента (пиксела) РЛИ. При наличии характерного спекл-шума в когерентных РЛИ и отсутствии априорной информации у противника об электрофизических свойствах наблюдаемого участка поверхности Земли (УПЗ) (высотах рельефа и других объектов местности, их поверхностей (шероховатости и влажности)) не позволяет достоверно определить причину увеличения яркости пикселов и, следовательно, эффективной площади рассеяния (ЭПР) объектов; при этом уровень распознавания объекта снижается. Поэтому зоны скрытия - радиолокационные наложения наряду с тенями - являются следствием взаимосвязанного проявления маскировочных свойств местности и закономерностей функционирования радиолокатора с высоким разрешением по дальности и по углу (по азимуту) и должны быть использованы для маскировки объектов.
Средний для плоского УПЗ угол падения УП=90°-УМ радиолокационного сигнала определяется высотой полета и углом крена диаграммы направленности антенны (ДНА) γ радиолокатора. Локальный угол падения радиолокационного сигнала УПУМ,АЗ определяется между направлением на радиолокатор, описываемое углом места УМ и углом азимута АЗ (отсчитываемых соответственно в вертикальной и горизонтальной плоскостях), и нормалью к разрешаемому элементу УПЗ N, ориентация которой зависит от его наклона УПУПЗ и разворота АЗУПЗ (фиг.2). Значение разворота АЗУЗП определяется исходя из знаков проекций А, В, С нормали N на оси декартовой системы координат OXYZ (ось OZ направлена по вертикали):




Если наклон поверхности УПУПЗ=0, то разворот АЗУПЗ не определяется и тогда УПУМ,АЗ=90°-УМ. Радиолокационные тени на РЛИ формируются при выполнении двух условий:
а) 90°+УМ<УПУМ,АЗ<180°-УМ или, что аналогично, 
б) высота тени должна превышать среднюю высоту УПЗ.
Радиолокационные наложения на РЛИ также формируются при выполнении двух условий:
а) 0°<УПУМ,АЗ<90°+УМ или, что аналогично, -90°<(N, OZ)<УМ.
б) средние высоты УПЗ должны совпадать или находиться в диапазоне с учетом угла места с высотой наложения.
Максимально возможные горизонтальные дальности до границ радиолокационной тени RT определяются перепадом высот (фиг.3)

Максимально возможные горизонтальные дальности до границ радиолокационного наложения RN соответственно определяются:

Таким образом, степень проявления радиолокационных теней и наложений изменяется из-за угла крена ДНА радиолокатора при априорно известных высоте полета и перепаде высот объектов местности.
К орбитальным носителям радиолокатора относятся космические аппараты, орбитальные станции и многоразовые космические транспортные корабли. С 1978 года в мире прошли летно-конструкторские испытания и штатную эксплуатацию более двадцати космических радиолокаторов, при этом наиболее распространенными из-за высокого разрешения формируемых РЛИ поверхности Земли (ПЗ) являются радиолокаторы с когерентной обработкой сигнала - с синтезированной апертурой антенны (КРСА). В настоящее время иностранные государства эксплуатируют несколько КРСА: США - 4 космических аппарата Lacrosse (планируется развертывание системы КРСА SBR), Япония - IGS-R и ALOS/PALSAR, Канада - Radarsat-1 (в 2006 году планируется запуск Radarsat-2 с повышенным разрешением и многополяризационной обработкой), Европа - ERS-2/AMI и ENVISAT/ASAR, Китай - «Ji-anBing-5»; в стадии завершения и подготовки к запуску КРСА Италии, Германии, Израиля и Индии. Таким образом, выявление методов скрытия мобильных объектов от радиолокационного наблюдения такой многочисленной орбитальной группировки КРСА является актуальной задачей. Общей чертой всех КРСА является их расположение на круговых орбитах (эксцентриситет которых равен нулю), т.е. высоту полета КРСА можно считать постоянной. Это вызвано минимизацией влияния вертикальной составляющей скорости КРСА на величину средней доплеровской частоты спектра отраженного сигнала для последующего упрощения обработки и формирования РЛИ.
В отличие от воздушных орбитальные носители радиолокаторов имеют высокую скорость перемещения относительно поверхности Земли (до 7.5 км/с), поэтому для минимизации значения средней доплеровской частоты спектра отраженного сигнала в целях упрощения последующей обработки ДНА КРСА ориентируют перпендикулярно направлению полета орбитального носителя или, что аналогично, его трассе - проекции траектории полета на ПЗ. В этом случае дополнительно достигается максимальная ширина доплеровского спектра при заданной ширине ДНА, что используется для достижения максимальной разрешающей способности РЛИ по азимуту (вдоль направления полета). При ограничении диапазона несущих частот/длин волн радиолокационного сигнала КРСА из-за влияния атмосферы до 3-50 см значения средних доплеровских частот при произвольной ориентации ДНА весьма значительны. Изменяющееся значение средней доплеровской частоты по мере орбитального полета носителя при перпендикулярной ориентации ДНА обусловлено вариацией проекции линейной скорости вращения ПЗ на направление облучения, определяемое наклонением и высотой орбиты и широтой подспутниковой точки. При использовании способа компенсации средней доплеровской частоты путем изменения ориентации ДНА величина отклонения ДНА от перпендикулярного направления не превышает единиц градусов: максимальное на экваторе и нулевое в точках вертекса орбиты (где широта подспутниковой точки равна наклонению). Поэтому можно полагать, что ориентация ДНА по углу курса/рысканья производится перпендикулярно трассе КРСА, при этом реализуется так называемый боковой обзор. К его характеристикам относят: сторону обзора - вправо или влево от трассы - и диапазон углов крена ДНА Δγ=γmax-γmin для изменения полосы/кадра наблюдения в пределах потенциальной полосы обзора (фиг.4). Изменение ориентации ДНА в прожекторном (телескопическом) режиме по углам крена и курса/рысканья для отслеживания УЗП при учете вращения Земли не превышает единиц градусов, т.е. перпендикулярное трассе направление обзора сохраняется.
При широкой полосе обзора (большом диапазоне изменения угла крена оси ДНА Δγ) для достижения одинаковой горизонтальной разрешающей способности ΔRГ изменяют ширину спектра излучаемого сигнала Δfс (на ближней границе полосы с большей) (фиг.5). Минимальный угол крена ДНА γmin определяется ухудшением разрешающей способности по дальности при УПЗ находящихся вблизи трассы КА (невозможностью расширять спектр излучаемого радиолокационного сигнала до требуемого значения из-за проявления диспергирующих свойств ионосферы), увеличением зеркального отражения фона и соответствующим маскированием слабоотражающих объектов и увеличением проявления эффекта наложения радиолокационных изображений (РЛИ). Максимальный угол крена γmax определяется условием промаха ДНА мимо сферической ПЗ, энергетическим потенциалом передатчика КРСА (обеспечением заданного соотношения сигнал/шум) и возрастанием проявления эффектов радиотеней РЛИ. Вследствие взаимосвязей геометрии радиолокационного наблюдения и технических характеристик сигнала диапазон углов крена ДНА КРСА ограничен и априорно известен.
Для известной высоты круговой орбиты КРСА Н и угла крена ДНА γ возможно определить угол места УМ направления на КРСА из объекта местности на УЗП, которая при больших дальностях наблюдения уже проявляет свою сферическую форму. На основании теоремы синусов для плоских треугольников (фиг.6)
откуда

Центральный угол, соответствующий углу крена ДНА, находится как

где R3=6371 км - средний радиус Земли.
Следовательно, при известных параметрах орбиты КРСА (высоты) и диапазоне углов крена ДНА диапазон углов места возможных направлений радиолокационного наблюдения из космоса ограничен.
Вследствие закономерностей орбитального движения КРСА относительно вращающейся ПЗ проекция траектории орбиты - трасса - в зависимости от географической широты подспутниковой точки ВКРСА будет иметь различную азимутальную ориентацию, т.е. пересекать меридианы под различным углом. Например, для северного полушария для прямых орбит КРСА (наклонение орбиты iкрса<90°) курсовой угол трассы ψКРСА определяется исходя из теоремы синусов для сферических треугольников (фиг.7)

для обратных (iкрса>90°)

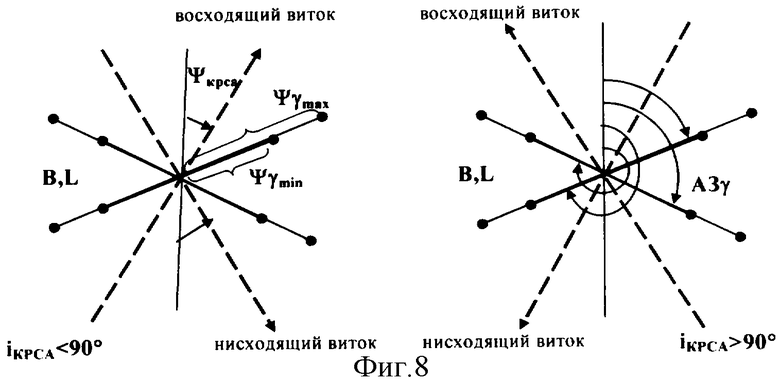
В точке вертекса орбиты (iкрса=Bкрса) курсовой угол трассы ψкрса=90°, т.е. азимутальное направление радиолокационного обзора из КРСА АЗγ, перпендикулярное трассе, совпадает с меридианом; во всех остальных случаях оно будет определяться комбинацией параметров - наклонением орбиты (прямая, обратная), направлением ветви витка орбиты (нисходящий, восходящий), стороной обзора (левый и правый различаются на 180°) и диапазоном значений центрального угла Δψγ=ψγmax-ψγmin, соответствующего диапазону углов крена ДНА Δγ (фиг.8, табл.1).
Исходя из теоремы косинусов для сторон сферических треугольников, широта наблюдаемого УПЗ В зависит от широты подспутниковой точки ВКРСА и курсового угла трассы КРСА ψКРСА (азимута направления обзора из КРСА АЗγ) и центрального угла ψγ (формула приведена для восходящего витка наклонной орбиты при правом обзоре)

откуда с учетом (3)

Аналогично по теореме косинусов для сторон сферических треугольников широту подспутниковой точки КРСА ВКРСА можно найти через азимут направления на КРСА из точки УПЗ АЗ (отсчитывается по часовой стрелке от направления на север)

откуда, с учетом (7), находим


Таким образом, радиолокационное наблюдение из космоса имеет следующие закономерности: во-первых, в зависимости от географической широты месторасположения наблюдаемого объекта диапазон углов азимута направления радиолокационного наблюдения ограничен как из-за ограничения углов места (углов крена ДНА), так и из-за стороны радиолокационного обзора от трассы и наклонения орбиты. Во-вторых, реализуемый угол крена ДНА при пролете КРСА и, следовательно, угол места направления радиолокационного наблюдения однозначно определяет его угол азимута; в итоге направление на КРСА - направление радиолокационного наблюдения - соответствует кратчайшему расстоянию до него.
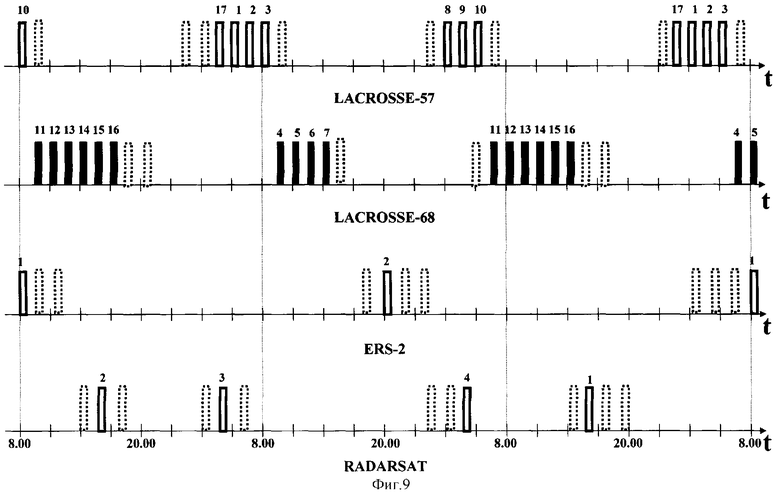
Наклонение орбиты является наиболее устойчивым параметром орбиты, поскольку на его изменение в орбитальном полете требуются значительные затраты топлива бортовой двигательной установки, что является нерациональным при длительных сроках эксплуатации КРСА. Периодические коррекции орбиты проводятся, прежде всего, для поддержания требуемой высоты (радиус-вектора) орбиты в целях компенсации тормозящего воздействия атмосферы исходя из целей радиолокационного наблюдения, баллистической структуры системы КРСА с другими космическими аппаратами и загрузки наземного сегмента комплекса управления, что в результате приводит к изомаршрутности или повторяемости трасс КРСА. Это означает, что из всего непрерывного множества диапазона углов места и азимута направления радиолокационного наблюдения реализуются только дискретные значения (на фиг.9 они показаны точками). Кроме этого, интервал между пролетами одного КРСА и соответствующего радиолокационного наблюдения на траверсном направлении кратен периоду орбиты, который для практических случаев орбит КРСА составляет ˜1.5 часа. Если в состав орбитальной группировки входит несколько КРСА, то интервал между радиолокационными наблюдениями будет определяться параметрами баллистической структуры. Длительность моментов радиолокационного наблюдения (собственно интервал синтезирования апертуры антенны) составляет доли-единицы секунд.
Пространственные (дискретные углы места и азимута) и временные (моменты пролета КРСА и интервалы между ними) показатели направлений радиолокационного наблюдения носят устойчивый характер: при длительности промежутка расчета (в теории полетов космических аппаратов используется термин «баллистический прогноз на основе моделей движения и начальных условий») орбиты до 1-2 месяцев, соизмеримых с периодом коррекции орбит для практических высот орбит КРСА, интервалы обзора меняются в пределах единиц минут, а углы наблюдения - единиц градусов. Это означает, что защитные (маскировочные) эффекты местности будут проявляться с высокой степенью детерминированности и могут быть предварительно рассчитаны для заданного позиционного района расположения мобильных объектов.
К существенным отличиям предлагаемого способа относятся:
1. Расчет моментов времени пролета космического радиолокатора точек минимальной дальности до него и соответствующих им углов места и азимута на основе априорно известных географического расположения маршрута движения объекта и параметров орбиты космического радиолокатора - для оценки временного графика пролетов и направлений на космический радиолокатор;
2. Определение углов места и азимута направления радиолокационного наблюдения из множества углов места и азимута направлений на точки минимальной дальности до радиолокатора на основе априорно известных параметров ориентации диаграммы направленности антенны космического радиолокатора - для окончательного уточнения временного графика и направлений радиолокационных наблюдений;
3. Расчет ориентации и размеров зон скрытия - зон радиолокационных наложений и радиолокационных теней - на основе априорно известных местоположения и высоты искусственных и естественных объектов участков местности, расположенных по маршруту движения, и углов места и азимута направления радиолокационного наблюдения для каждого выбранного момента пролета - для предварительного анализа маскировочных свойств местности вдоль маршрута движения, проявляющихся при различной ориентации направления радиолокационного наблюдения;
4. Выбор зон скрытия, обеспечивающих снижение уровня обнаружения и распознавания, на основе априорно известных габаритных размеров мобильного объекта - для одновременного снижения эффективности радиолокационного наблюдения и минимизации расхода моторесурса мобильного объекта;
5. Перемещение мобильного объекта по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора и остановка мобильного объекта в моменты пролетов в зонах скрытия, обеспечивающих заданный уровень снижения обнаружения и распознавания - преимущественно в зонах радиолокационных теней при малых углах места направления радиолокационного наблюдения и в зонах радиолокационных наложений - при больших углах места - для обеспечения снижения уровня обнаружения и распознавания объекта.
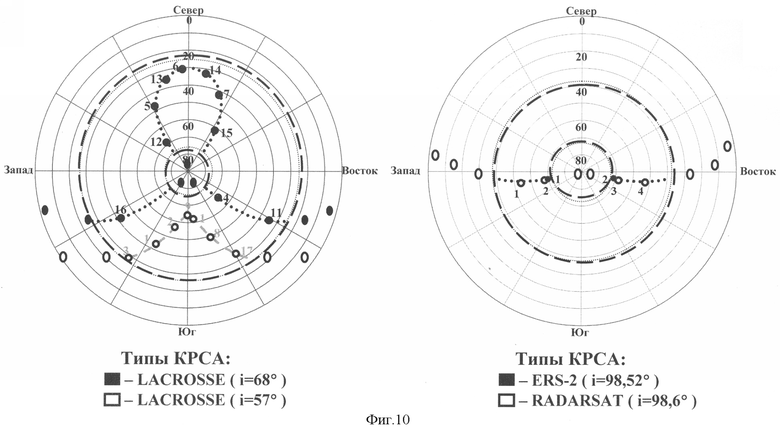
Реализация предлагаемого способа для скрытия типового мобильного объекта с габаритными размерами L=15 м, D=3.8 м, Н=4 м и скоростью движения V=50 км/ч в районе г.Санкт-Петербург с географическими координатами В=60° с.ш. и L=30° в.д. показывает следующие результаты. На основе параметров орбиты вышеуказанных КРСА (начальных условий, взятых, например, с сайтов NASA/NORAD www.celestrack.com или FAS www.fas.org) и пакета баллистического прогноза Orbitron рассчитывают моменты пролета КРСА точек минимальной дальности до него и соответствующие им углы места и азимута. На фиг.9 представлены результаты трехсуточного прогноза орбит КРСА: моменты пролетов следуют последовательными пачками с практически одинаковым интервалом ˜1 час 30 мин; пунктиром указаны моменты пролетов (неоцифрованные), не входящие в множество моментов радиолокационного наблюдения вследствие несовпадения угла места точки минимальной дальности с диапазоном допустимых углов места данного КРСА (углов крена ДНА) (концентрические пунктирные линии фиг.10), т.е. при нахождении КРСА в области зенита и края радиогоризонта радиолокационное наблюдение не проводится. КРСА с односторонним обзором ERS-2 и RADARSAT (вправо от трассы), находящиеся на солнечно-синхронных орбитах (iкрса˜90°),имеют малый диапазон изменения угла азимута и могут производить наблюдение с восточных направлений на нисходящем витке, и с западных - на восходящем. Для КРСА ERS-2 с неизменяемой ДНА количество радиолокационных наблюдений заданного района значительно меньше, чем для КРСА RADARSAT с переменным углом крена ДНА. Для КРСА LACROSSE с двусторонним обзором и наклонением iкрса<90° диапазоны возможных углов азимута радиолокационного наблюдения гораздо шире и лежат в 3-4 угловых секторах (северо-запад, северо-восток, юго-запад, юго-восток, север, юг), при этом диапазон изменения угла места составляет 20-70°. Подобные КРСА ведут наблюдение на смежных витках орбит, поэтому для них характерно изменение угла азимута радиолокационного наблюдения на ˜180° для соседних моментов пролета.
Расчет зон скрытия производится на основе информации из топографических карт, как правило, в настоящее время используются цифровые карты местности и цифровые пространственные модели местности в геоинформационных системах. На основе зависимостей (1), (2), (3) и данных табл.2 рассчитываются ориентация и размеры зон скрытия. Например, для трехэтажного дома ΔH=10 м и углов наблюдения при пролете №11 КРСА LACROSSE (i=68°) УМ=36° и АЗ=120° длина радиолокационного наложения RN=7.3 м перед домом в том же азимутальном направлении, а длина радиолокационной тени RT=13.8 м за домом в азимутальном направлении, противоположном наблюдению, т.е. 300°.
В целях снижения распознавания для размещения объекта можно использовать обе зоны скрытия, однако предпочтительнее в целях снижения обнаружения мобильного объекта следует выбрать зону радиолокационной тени (с высотой Н=4 м, меньшей высоты дома), с расположением вдоль дома, т.к. его длина L=15 м меньше длины радиолокационной тени.
Следующее радиолокационное наблюдение №12 КРСА LACROSSE с углами УМ=70° и А3=330° происходит через интервал Т=1.5 часа, поэтому зоны скрытия с требуемыми размерами RN и RT необходимо найти на участке маршрута движения через V·T˜75 км. Если требуется обеспечить скрытие объекта на том же участке местности, то целесообразно использовать зону радиолокационного наложения того же дома RN=27 м, поскольку размер радиолокационной тени RT=3.6 м меньше любого габаритного размера
Источники информации
1. Степанов Ю.Г. Противорадиолокационная маскировка. - М.: Сов. радио, 1968. - стр.74-75.
2. Палий А.И. Радиоэлектронная борьба, 2-е изд., перераб. и доп. - М.: Воениздат, 1989, с.138.
3. Военная топография / А.А.Псарев, А.Н.Коваленко, А.М.Куприн, Б.И.Пирнак. - М.: Воениздат, 1986. - с.319-320.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2019 |
|
RU2730374C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2023 |
|
RU2825020C1 |
| СПОСОБ ИМИТАЦИИ НАЗЕМНОГО ОБЪЕКТА ПРИ РАДИОЛОКАЦИОННОМ НАБЛЮДЕНИИ | 2006 |
|
RU2310884C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2021 |
|
RU2794985C2 |
| Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны | 2019 |
|
RU2707556C1 |
| СПОСОБ ИМИТАЦИИ ОБЪЕКТОВ ПРИ РАДИОЛОКАЦИОННОМ МОНИТОРИНГЕ | 2017 |
|
RU2654847C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| Способ снижения заметности подвижного объекта для систем космической гиперспектральной разведки | 2021 |
|
RU2761122C1 |


Изобретение относится к области маскировки наземных мобильных объектов от космических систем радиолокационной разведки. Целью изобретения является снижение уровня обнаружения и распознавания наземного мобильного объекта при радиолокационном наблюдении космическим радиолокатором. Согласно изобретению на основе априорно известных географического расположения маршрута движения объекта и параметров орбиты космического радиолокатора рассчитывают моменты времени пролета космическим радиолокатором точек минимальной дальности до него и соответствующих им углов места и азимута. Для окончательного уточнения временного графика и направлений радиолокационных наблюдений на основе априорно известных параметров ориентации диаграммы направленности антенны космического радиолокатора определяют углы места и азимута направления радиолокационного наблюдения из множества углов места и азимута направлений на точки минимальной дальности до радиолокатора. Для предварительного анализа маскировочных свойств местности вдоль маршрута движения, проявляющихся при различной ориентации направления радиолокационного наблюдения на основе априорно известных местоположения и высоты искусственных и естественных объектов участков местности, расположенных по маршруту движения, и углов места и азимута направления радиолокационного наблюдения для каждого выбранного момента пролета рассчитывают ориентацию и размеры зон скрытия - зон радиолокационных наложений и радиолокационных теней. Для одновременного снижения эффективности радиолокационного наблюдения и минимизации расхода моторесурса мобильного объекта на основе априорно известных габаритных размеров мобильного объекта выбирают зоны скрытия, обеспечивающие снижение уровня обнаружения и распознавания. Перемещают мобильный объект по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора и останавливают мобильный объект в моменты пролетов в зонах скрытия, обеспечивающих заданный уровень снижения обнаружения и распознавания преимущественно в зонах радиолокационных теней при малых углах места направления радиолокационного наблюдения и в зонах радиолокационных наложений - при больших углах места. 10 ил., 2 табл.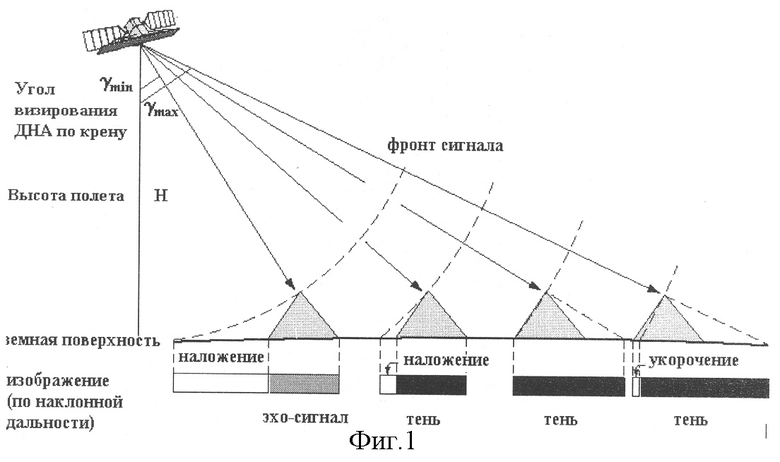
Способ скрытия наземного мобильного объекта от радиолокационного наблюдения из космоса, включающий перемещение наземного мобильного объекта по маршруту движения с использованием зон скрытия, отличающийся тем, что на основе априорно известных географического расположения маршрута движения объекта и параметров орбиты космического радиолокатора рассчитывают моменты времени пролета радиолокатором точек минимальной дальности до него от объекта и соответствующие им углы места (УМ) и азимута (A3), на основе априорно известных параметров ориентации диаграммы направленности антенны (ДНА) космического радиолокатора определяют углы места и азимута направления радиолокационного наблюдения из множества углов места и азимута направлений на точки минимальной дальности до радиолокатора по математическим выражениям
γ∈[γmin,γmax] - угол крена ДНА радиолокатора;
Н - высота орбиты радиолокатора, км;
RЗ=6371 км - средний радиус Земли;
 - для восходящего витка орбиты и левой стороны обзора;
- для восходящего витка орбиты и левой стороны обзора;
 - для восходящего витка орбиты и правой стороны обзора;
- для восходящего витка орбиты и правой стороны обзора;
 - для нисходящего витка орбиты и левой стороны обзора;
- для нисходящего витка орбиты и левой стороны обзора;
 - для нисходящего витка орбиты и правой стороны обзора;
- для нисходящего витка орбиты и правой стороны обзора;
В - географическая широта района наблюдения;
i - наклонение орбиты радиолокатора;
 - центральный угол, соответствующий углу крена ДНА,
- центральный угол, соответствующий углу крена ДНА,
на основе априорно известных местоположения и высоты искусственных и естественных объектов участков местности, расположенных по маршруту движения, УМ и угла АЗ направления радиолокационного наблюдения для каждого момента пролета космического радиолокатора рассчитывают ориентацию и размеры зон скрытия - зон радиолокационных наложений и радиолокационных теней, осуществляют выбор зон скрытия, обеспечивающих снижение уровня обнаружения и распознавания, с учетом габаритных размеров мобильного объекта осуществляют перемещение мобильного объекта по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора, и остановку мобильного объекта в моменты его пролетов в зонах скрытия, обеспечивающих заданный уровень снижения обнаружения и распознавания - преимущественно в зонах радиолокационных теней при малых углах места направления радиолокационного наблюдения и в зонах радиолокационных наложений - при больших углах места.
| ПСАРЕВ А.А., КОВАЛЕНКО А.Н | |||
| Военная топография | |||
| - М.: Воениздат, 1986, с.319-320 | |||
| УСТРОЙСТВО МАСКИРОВКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1999 |
|
RU2178136C2 |
| УСТРОЙСТВО МАСКИРОВКИ | 1997 |
|
RU2170406C2 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ РАДИОМЕТРИЧЕСКОГО КОНТРАСТА НАЗЕМНЫХ ОБЪЕКТОВ | 2002 |
|
RU2214578C1 |
| US 4640851 А, 03.02.1987 | |||
| US 4528229 А, 09.07.1985. | |||

