Предлагаемый способ относится к области маскировки наземных подвижных объектов от космических систем оптико-электронного наблюдения.
Известны способы маскировки наземных подвижных объектов от различных систем наблюдения (патенты РФ №2.004.123.944, 2.005.129.373, 2.006.117.216, 2.006.124.136, 2.170.406 (10.07.2001), 2.178.136 (10.07.2001), 2.214.578 (20.10.2003), 2.248.002, 2.278.347, 2.284.002, 2.312.297 (12.10.2007), 2.313.056; патенты США №4.528.229 (09.07.1985), 4.640.851 (03.02.1987), 4.560.595 (24.12.1985), 5.077.101 (31.12.1989); WO 89/06338 (13.07.1989); Мухин В.И. Основы маскировки объектов. - М.: МО РФ, 1989. - С.24-38, и другие).
Из известных способов наиболее близким к предлагаемому является «Способ скрытия мобильного объекта от радиолокационного наблюдения из космоса» (патент РФ 2.312.297, МПК8 F41Н 3/00, 2006), который и выбран в качестве базового объекта.
Указанный способ основан на перемещении наземного мобильного объекта по маршруту движения с использованием зон скрытия. На основе априорно известных географического расположения маршрута движения объекта и параметров орбиты космического радиолокатора рассчитывают ориентацию и размеры зон скрытия для объектов участков местности, расположенных по маршруту движения. Перемещают мобильный объект по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора и останавливают мобильный объект в моменты пролетов в зонах скрытия.
Однако возможности данного способа используются не в полной мере. Он не учитывает временные ограничения на передвижение мобильного объекта, а также ряд демаскирующих признаков, например цветовой контраст с окружающим фоном. Кроме того, он не может быть использован для снижения вероятности обнаружения наземного подвижного объекта путем выбора маршрута движения с рациональным вариантом использования маскирующих свойств местности.
Технической задачей изобретения является снижение вероятности обнаружения наземного подвижного объекта на кадровом снимке космической оптико-электронной системы наблюдения.
Поставленная задача решается тем, что способ скрытия мобильного объекта от радиолокационного наблюдения из космоса, заключающийся в соответствии с ближайшим аналогом в перемещении наземного мобильного объекта по маршруту движения с использованием зон скрытия, согласно которому на основе априорно известных географического расположения маршрута движения объекта и параметров орбиты космического радиолокатора рассчитывают моменты времени пролета радиолокатором точек минимальной дальности до него от объекта и соответствующие им углы места и азимута, на основе априорно известных параметров ориентации диаграммы направленности антенны космического радиолокатора определяют углы места и азимута направления радиолокационного наблюдения из множества углов места и азимута направлений на точки минимальной дальности до радиолокатора, на основе априорно известных местоположения и высоты искусственных и естественных объектов участков местности, расположенных по маршруту движения, угла места и угла азимута направления радиолокационного наблюдения для каждого момента пролета космического радиолокатора рассчитывают ориентацию и размеры зон скрытия - зон радиолокационных наложений и радиолокационных теней, осуществляют выбор зон скрытия, обеспечивающих снижение уровня обнаружения, с учетом габаритных размеров мобильного объекта осуществляют перемещение мобильного объекта по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора и остановку мобильного объекта в моменты его пролета в зонах скрытия, отличается от ближайшего аналога тем, что на дорожной сети полевого района с учетом временных ограничений, накладываемых на передвижение, формируется множество маршрутов движения подвижного объекта, на основе параметров орбиты космического аппарата оптико-электронного наблюдения определяются временные интервалы пролета над территорией полевого района, формируется множество параметров взаимного пространственного положения космического аппарата оптико-электронного наблюдения и подвижного объекта для всех маршрутов, для каждого интервала пролета космического аппарата оптико-электронного наблюдения, формируются множества количественных оценок излучательно-отражательных характеристик подстилающей поверхности, проявляющихся в видимом оптическом диапазоне длин волн электромагнитного излучения, и характеристик зон оптической невидимости, образуемых объектами местности - естественными масками, определяется маршрут с наибольшими возможностями по использованию маскирующих свойств местности, подвижный объект перемещается по маршруту с допустимыми отклонениями по времени прохождения контрольных точек, необходимыми для использования маскирующих свойств местности.
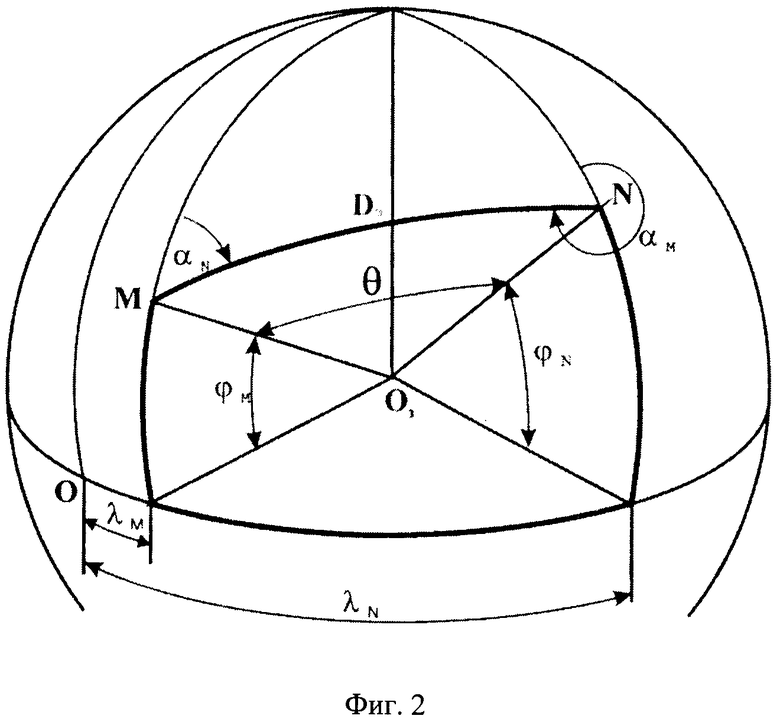
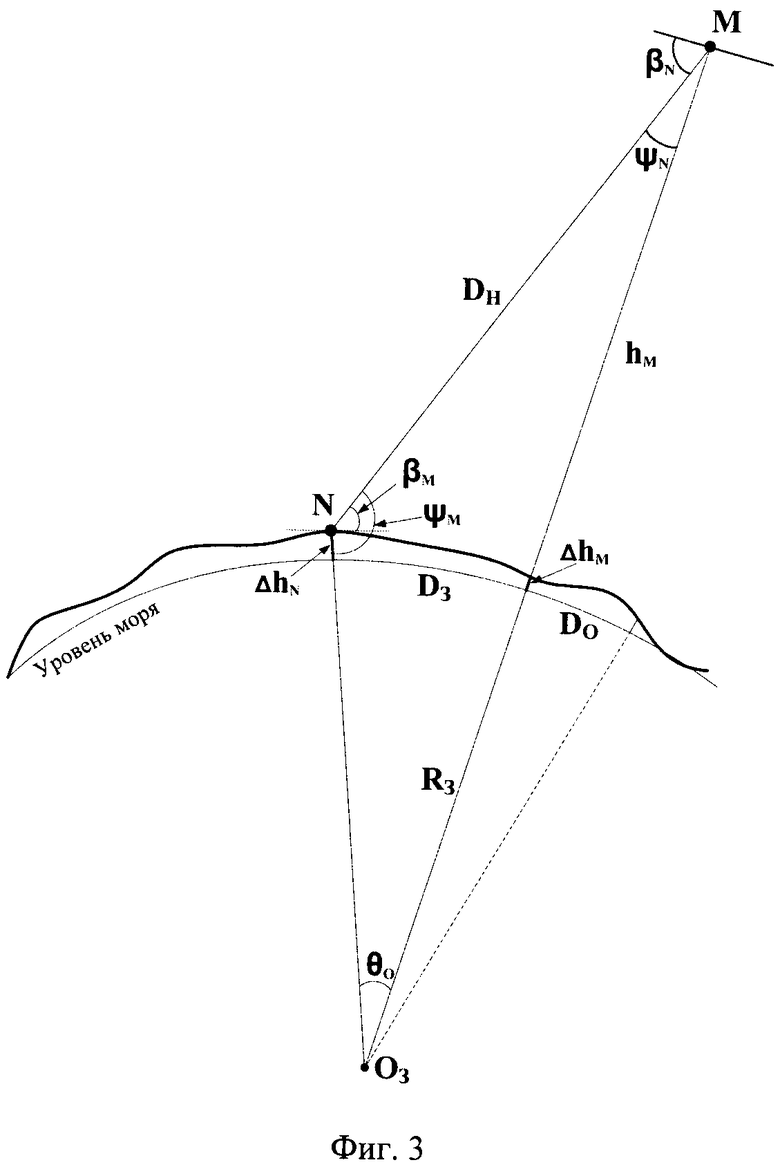
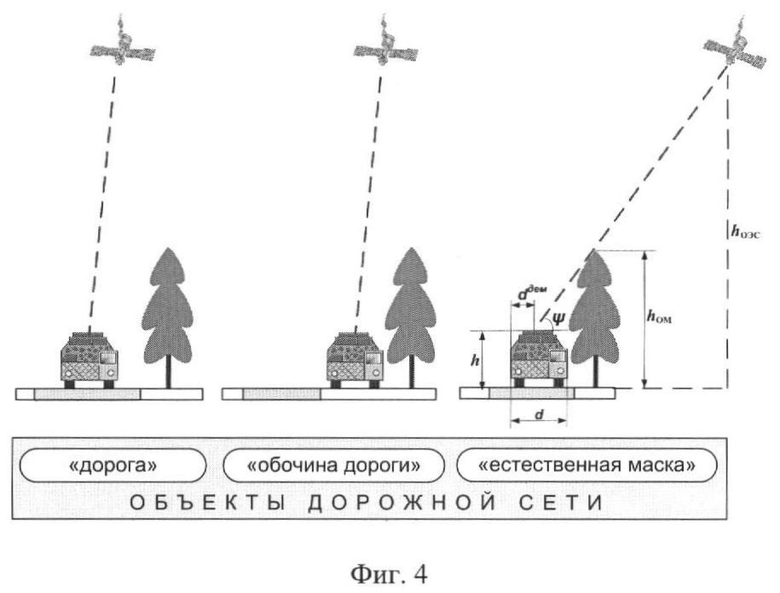
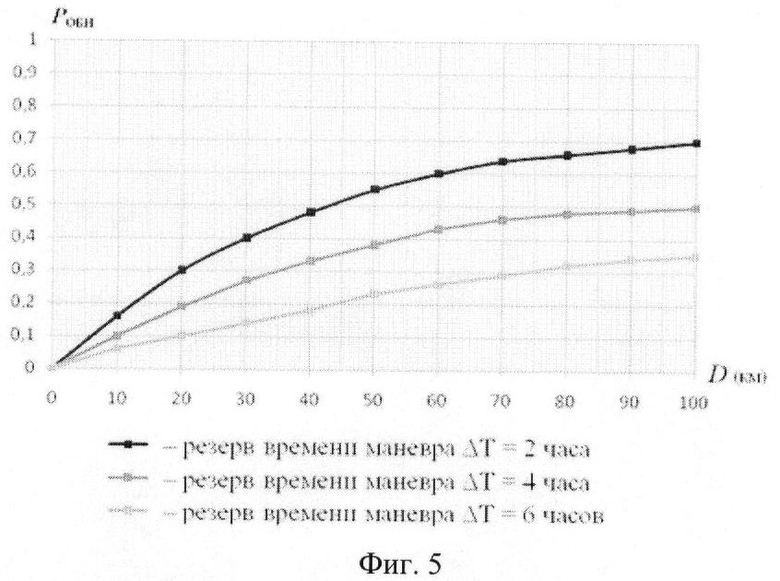
Структурные элементы дорожной сети полевого района представлены на фиг.1. Графическое представление дальности по поверхности Земли и азимутальных углов показаны на фиг.2. Графическое представление наклонной дальности DЗ, углов визирования ψ и углов места β приведено на фиг.3. Взаимное положение подвижного объекта, космического аппарата оптико-электронного наблюдения и естественной маски изображено на фиг.4. Графики результатов моделирования представлены на фиг.5 и фиг.6 соответственно.
Реализация изобретения осуществляется следующим образом.
Определяется дорожная сеть полевого района, которая представляет собой систему взаимосвязанных автомобильных дорог и представляется в виде графа (фиг.1)

V={vn,n=1(1)N}, W={wm,m=1(1)M},
где V - множество узлов графа;
W - множество ребер (дуг).
Пространственное расположение объектов графа дорожной сети G(V,W) задается метрикой М (множеством плановых прямоугольных координат). Для вершин задается точечная метрика M(vn)=<X,Y,H>n. Ребра графа G(V,W) аппроксимируются ломаной, при этом линейная метрика ребра графа содержит в себе множество линейных метрик отрезков ломаной (отрезков дорожной сети) M(wm)={<X,Y,H>l m, l=1(1)Lm}.
С точки зрения моделирования процесса обнаружения подвижного объекта космическим аппаратом оптико-электронного наблюдения каждое ребро графа G{V,W) представляется в виде множества участков дорожной сети этого ребра:

где wm - m-ое ребро графа;
Um - множество участков дорог w-го ребра.
Под участком дорожной сети понимается линейный объект, состоящий из множества расположенных последовательно друг за другом отрезков дорожной сети, для которых значения их дирекционных углов сводятся к среднему значению (дирекционному углу участка дорожной сети):

где γk - дирекционный угол k-го отрезка дорожной сети;
γУДС - дирекционный угол участка дорожной сети;
K - общее количество отрезков дорожной сети, входящих в участок дорожной сети.
На графе дорожной сети G(V,W) строятся возможные маршруты подвижного объекта

где Ω0 - множество маршрутов подвижного объекта;
ωi - вариант i-го маршрута;
Ттр - временные ограничения на передвижение;
T(ωi) - время прохождения i-го маршрута.
Для каждого маршрута формируется множество контрольных точек, совпадающих с геометрическим центром участка дорожной сети. Рассчитывается время их прохождения подвижным объектом при средней скорости движения.
Для расчета пространственно-временных параметров взаимного положения космического аппарата оптико-электронного наблюдения и подвижного объекта в единой системе отсчета выполняются следующие процедуры. Расчет производится на момент времени ti при условии, что заданы параметры кеплеровской орбиты космического аппарата оптико-электронного наблюдения и временной интервал пролета (to, tK) над полевым районом.
Входные параметры по космическому аппарату оптико-электронного наблюдения:
а - большая полуось орбиты, км;
е - эксцентриситет орбиты (0<е<1, для круговых орбит е=0);
Ω - прямое восхождение восходящего узла орбиты (0<Ω≤2π);
I - наклонение орбиты (0≤i≤π);
ω - аргумент широты перигея (0<ω≤2π);
τ - время прохождения перигея (московское декретное время в секундах в заданной дате);
(tо, t К) - временной интервал пролета.
Входные параметры по подвижному объекту:
φN - широта, град;
λN - долгота, град;
ΔhN - высота расположения относительно уровня моря, км.
Выходные параметры:
ψм - угол визирования, град;
αM,N - взаимный азимутальный угол, град;
DH - наклонная дальность, км.
Высоты мест проекций космического аппарата оптико-электронного наблюдения и подвижного объекта (ΔhM, ΔhN) на земной поверхности относительно уровня моря определяются на основе цифровой модели местности для заданных географических координат подспутниковой точки космического аппарата оптико-электронного наблюдения и координат подвижного объекта.
Средний радиус Земли принимается равным RЗ=6371 км.
Восточная долгота и северная широта принимаются со знаком «+» (плюс), а западная долгота и южная широта - со знаком «-» (минус).
Значение шага по времени (ti+1-ti) расчета параметров пространственного положения космического аппарата наблюдения зависит от параметров орбиты и в данном случае принимается ее среднее значение, равное 20 с.
Из уравнения Кеплера методом половинного деления шага определяется эксцентрическая аномаль E0 на момент t0

где  - период обращения космического аппарата оптико-электронного наблюдения;
- период обращения космического аппарата оптико-электронного наблюдения;
к=398602,5 км3/с2 - гравитационная постоянная Земли.
Вычисляется аргумент широты космического аппарата оптико-электронного наблюдения

Вычисляется высота расположения космического аппарата оптико-электронного наблюдения

Широта и долгота подспутниковой точки вычисляются по следующим формулам:


Дальность прямой видимости D0 рассчитывается по формуле:

Наклонная дальность DH определяется по формуле:
где DЗ - дальность по поверхности Земли между космическим аппаратом оптико-электронного наблюдения и подвижным объектом, задаваемая в качестве исходной величины либо при известных координатах, определяемая по формуле


θ - геоцентрический угол между точками проекции космического аппарата оптико-электронного наблюдения и подвижного объекта на поверхность Земли, определяемый по формуле

Угол места из точки расположения подвижного объекта
Угол места подвижного объекта (из точки расположения космического аппарата оптико-электронного наблюдения)

Углы визирования из точки расположения космического аппарата оптико-электронного наблюдения рассчитываются по формулам:


Взаимные азимутальные углы, град, рассчитываются по формуле:

где

На основе параметров пространственного положения космического аппарата оптико-электронного наблюдения и подвижного объекта рассчитываются зоны оптической невидимости, образуемые естественными масками.
Площадь поверхности подвижного объекта (SN), которую не удалось расположить в зоне оптической невидимости, вычисляется по формуле

где (l, d, h) - длина, ширина, высота подвижного объекта соответственно;
(lом, hOM) - длина, высота объекта местности соответственно.
При отсутствии возможностей по использованию объектов местности в качестве естественных масок (SN≥l×d) вычисляют контраст подвижного объекта с дорожным покрытием и обочиной дороги

где rO - коэффициент яркости объекта;
rФ - коэффициент яркости фона (подстилающей поверхности).
Вероятность обнаружения подвижного объекта функционально зависит от площади поверхности подвижного объекта и от его контраста с фоном.
Формируется множество маршрутов подвижного объекта, удовлетворяющих требованиям по скрытности передвижения

где ΩC - множество маршрутов подвижного объекта;
ωi - вариант i-го маршрута;
РTP - требуемая вероятность обнаружения подвижного объекта;
Р(ωi) - вероятность обнаружения подвижного объекта на i-ом маршруте.
Для выбранных маршрутов корректируются графики их прохождения для максимального использования маскирующих свойств местности

где ti - время прохождения i-ой контрольной точки маршрута ωi;
 - резерв времени по прохождению маршрута;
- резерв времени по прохождению маршрута;
Δtj - резерв времени по прохождению j-ой контрольной точки;
N - количество контрольных точек маршрута.
Выбирается маршрут с наибольшим количеством оценок вероятности обнаружения подвижного объекта меньше заданной величины.
Применение данного способа позволяет снизить заметность наземных подвижных объектов в ходе их целевого применения с помощью приемов организационной маскировки, таких как скрытие подвижного объекта с использованием естественных масок и цветового контраста с покрытием обочины дороги, требует замедления движения объекта или его полную остановку. Кроме того, представленный способ решает задачу обоснования выбора маршрута и графика его прохождения подвижным объектом.
Результаты математического моделирования показали, что предлагаемый способ обеспечивает снижение заметности подвижного объекта для оптико-электронного наблюдения из космоса в 1,3-1,6 раза.
Способ позволяет определять зависимость показателя скрытности (РОБН) маневра от протяженности маршрута (D) при различных временных резервах (фиг.5) и при различных вариантах использования маскирующих свойств местности (фиг.6).
Преимущество способа заключается в исключении использования инженерно-технических мероприятий оптической маскировки, требующих существенных временных и ресурсных затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| Способ прогнозирования состояния группы подвижных объектов | 2018 |
|
RU2701091C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2019 |
|
RU2730374C1 |
| Способ снижения заметности подвижного объекта для систем космической гиперспектральной разведки | 2021 |
|
RU2761122C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2023 |
|
RU2825020C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2021 |
|
RU2794985C2 |
| СПОСОБ ИМИТАЦИИ НАЗЕМНОГО ОБЪЕКТА ПРИ РАДИОЛОКАЦИОННОМ НАБЛЮДЕНИИ | 2006 |
|
RU2310884C1 |
| СПОСОБ АДАПТИВНОЙ МАСКИРОВКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2009 |
|
RU2412421C1 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
Изобретение относится к области маскировки подвижных объектов от космических систем оптико-электронного наблюдения. Технический результат - снижение вероятности обнаружения объекта на кадровом снимке оптико-электронной системы космического аппарата наблюдения.
Сущность изобретения заключается в том, что на основе известной дорожной сети полевого района и параметров орбиты космического аппарата с учетом временных ограничений, накладываемых на передвижение, формируют множество допустимых маршрутов. На основе временных интервалов пролета и параметров орбиты космического аппарата, пространственного положения подвижного объекта формируется множество взаимных пространственных положений для всех контрольных точек каждого маршрута из множества маршрутов относительного азимута и угла визирования объекта. Для определения возможностей использования маскирующих свойств местности в оптическом диапазоне для каждого интервала пролета космического аппарата наблюдения формируют множество количественных оценок видовых (излучательно-отражательных) характеристик подстилающей поверхности и характеристик зон оптической невидимости, образуемых объектами местности - естественными масками. Определяют маршрут с наибольшими возможностями по использованию маскирующих свойств местности. 6 ил.
Способ снижения заметности наземного подвижного объекта для систем наблюдения из космоса, включающий перемещение наземного подвижного объекта по маршруту движения с использованием маскирующих свойств местности, отличающийся тем, что при использовании систем оптико-электронного наблюдения, на основе априорно известных географического расположения дорожной сети и параметров орбиты космического аппарата оптико-электронного наблюдения и с учетом временных ограничений, накладываемых на передвижение подвижного объекта, формируют множество маршрутов его движения, разбивают дорожную сеть на участки, определяют время прохождения подвижным объектом контрольных точек, совпадающих с геометрическими центрами участков дорожной сети для каждого маршрута, на основе параметров орбиты космического аппарата с оптико-электронной системой наблюдения определяют временные интервалы пролета над территорией и для каждого интервала пролета формируют множество количественных оценок излучательно-отражательных характеристик подстилающей поверхности и характеристик зон оптической невидимости, образуемых естественными масками объектов местности, определяют маршрут с наибольшими возможностями по использованию маскирующих свойств местности, при этом подвижный объект с возможными замедлениями, ускорениями движения или остановками перемещают по маршруту с допустимыми отклонениями по времени прохождения контрольных точек для рационального использования маскирующих свойств местности.
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| УСТРОЙСТВО МАСКИРОВКИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1999 |
|
RU2178136C2 |
| УСТРОЙСТВО МАСКИРОВКИ | 1997 |
|
RU2170406C2 |
| US 4640851 A, 03.02.1987 | |||
| US 4528229 A, 09.07.1985. | |||

