Изобретение относится к области противодействия техническим средствам разведки и предназначено для оценки видимости скрываемых (маскируемых) наземных объектов в условиях естественных и искусственных масок от технических средств видовой разведки космического базирования.
В настоящее время видовая космическая разведка является одной из самых информативных, которая включает телевизионную, тепловизионную видовую и радиолокационную видовую разведки. Они основаны на регистрации отраженных от объектов или испускаемых непосредственно объектами электромагнитных волн видимого, инфракрасного, ультрафиолетового или радиолокационного диапазона и построении изображений объекта в реальных или условных цветах [2].
В свою очередь, одним из эффективных способов противодействия видовой разведке является маскировка объекта с помощью естественных и искусственных масок (лес, горы, здания и.т.п), особенно в лесистой местности и в условиях городской застройки [1]. Естественные маски, в сравнении с табельными маскировочными комплектами, имеют неоспоримое преимущество - высокую маскировочную способность за счет того, что сами являются частью естественного фона, а также имеют высокий коэффициент затухания электромагнитных волн диапазонов указанных видов разведок.
В целях контроля качества маскировки объекта проводится оценка его видимости, которая позволяет оценить эффективность применяемых мер.
Известны воздушный и наземный способы оценки видимости объекта [1].
Воздушный контроль проводится с использованием комплекта средств инженерной разведки, путем фотографирования замаскированного объекта с разных ракурсов и анализа фотоснимков на предмет видимости скрываемого объекта на внешнем (подстилающем) фоне, в том числе в условиях естественных и искусственных масок. Фотографирование проводится с воздуха с помощью летательного аппарата. Недостатками воздушного контроля являются временные затраты, а также практическая невозможность выполнения съемки объекта со всех ракурсов возможных пролетов средств разведки космического базирования.
Наиболее близким по технической сущности способом - прототипом, является наземный контроль, который проводится аналогично воздушному, но с поверхности Земли. Недостатками наземного контроля являются временные затраты, а так же низкая точность оценки видимости объекта, связанная с ограничениями на применение способа для космической разведки, т.к. контроль производится только с поверхности Земли.
Технический результат выражается в сокращении временных затрат и повышение точности оценки видимости объекта из космоса.
Технический результат достигается благодаря расчету интервалов видимости скрываемого объекта для определенного космического аппарата видовой разведки на основании данных о текущем времени, траектории полета данного космического аппарата, географических координатах скрываемого объекта, а также координат непрозрачных элементов окружающего пространства. Координаты непрозрачных элементов определяют путем сканирования лазерным сенсором верхней полусферы пространства относительно точки нахождения объекта на поверхности Земли по углам азимута и углам места.
Таким образом, применение лазерных сенсоров значительно сокращает временные затраты на оценку видимости объекта, а использование цифровой модели окружающего пространства повышает точность оценки за счет возможности применения средств вычислительной техники для расчета видимости объекта со всех ракурсов возможных пролетов средств разведки.
Сущность изобретения поясняется чертежами.
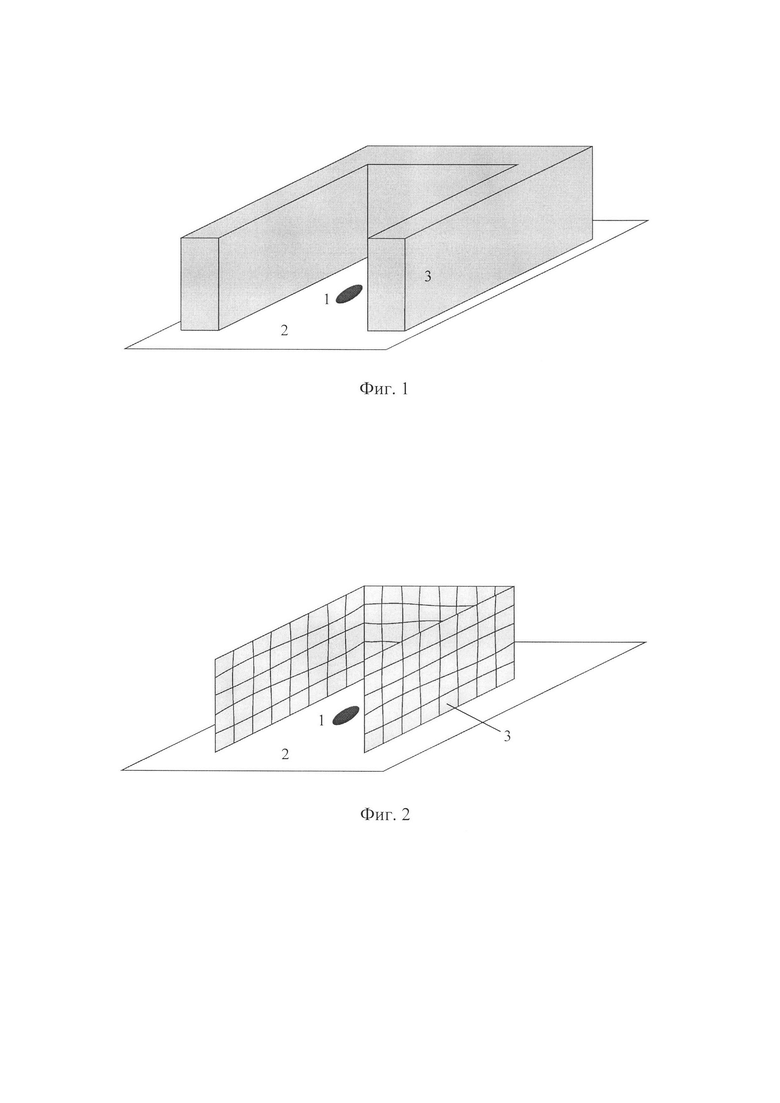
Фиг. 1. Расположение скрываемого объекта в условиях естественных масок, где
1 - скрываемый объект, представленный геометрической точкой;
2 - подстилающая поверхность - Земля;
3 - естественные маски (деревья).
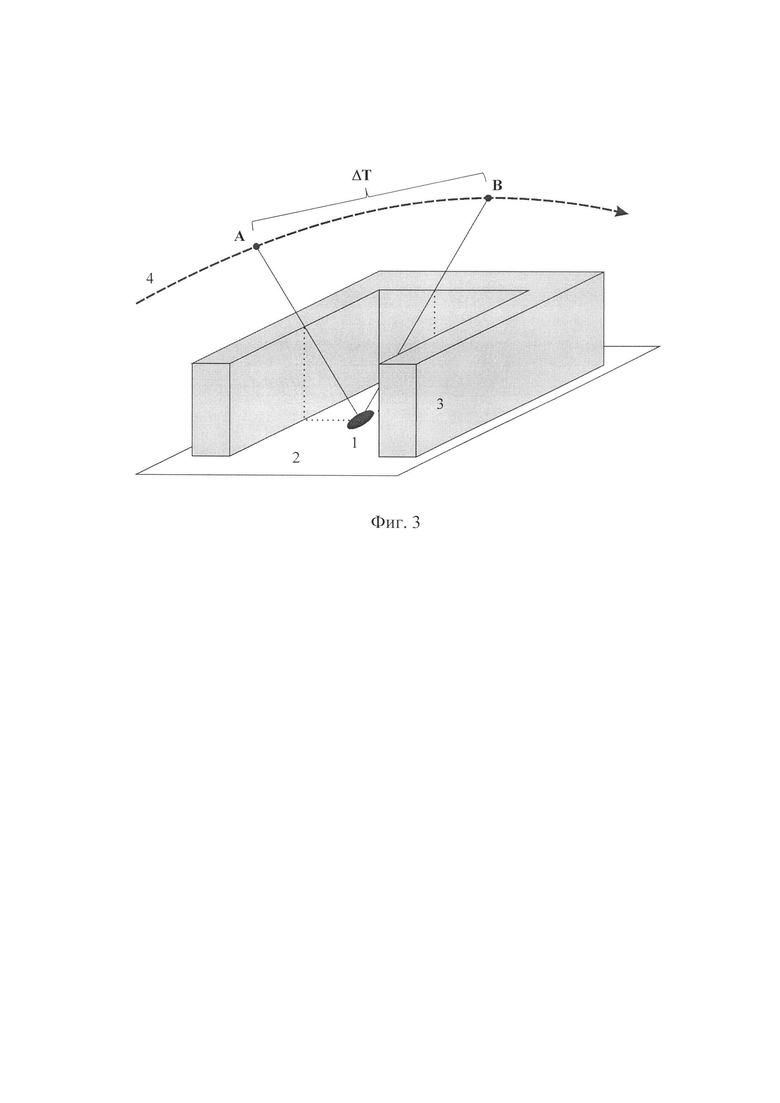
Фиг. 2. Цифровая модель окружающего скрываемый объект пространства, где
1 - скрываемый объект, представленный геометрической точкой;
2 - подстилающая поверхность - Земля;
3 - непрозрачные элементы окружающего пространства в виде цифровой модели.
Фиг. 3. Моменты видимости скрываемого объекта относительно трассы пролета космического аппарата, где
1 - скрываемый объект, представленный геометрической точкой;
2 - подстилающая поверхность - Земля;
3 - естественные маски (деревья).
4 - трасса пролета космического аппарата;
А - момент входа космического аппарата в зону видимости скрываемого объекта;
В - момент выхода космического аппарата из зоны видимости скрываемого объекта;
ΔТ - интервал видимости скрываемого объекта.
Вариант осуществления изобретения представлен на фиг. 1-3.
Допустим скрываемый объект 1, видимость которого оценивается, расположен на поверхности Земли 2 в условиях естественных масок - леса 3, (фиг. 1). Скрываемый объект, для простоты описания, представлен геометрической точкой.
Координаты непрозрачных элементов окружающего пространства получают с помощью лазерного сенсора, в качестве которого может выступать лидар, использующий явления поглощения и рассеяния света в оптически прозрачных средах. Координаты вычисляются на основании информации о географических координатах скрываемого объекта, расстоянии от сенсора до непрозрачных элементов, углах положения непрозрачных элементов относительно сенсора - углах азимута и места. Лазерный сенсор устанавливается на месте скрываемого объекта. На основании полученных данных формируется цифровая модель окружающего скрываемый объект пространства (фиг. 2).
Данные о текущем времени и географических координатах скрываемого объекта получают известными способами.
Данные о траектории полета космического аппарата разведки можно получить с помощью двухстрочного набора элементов TLE (аббр. от англ. two-line element set), представляющий собой набор элементов орбиты спутников Земли, периодически обновляемый и размещаемый в свободном доступе сети Интернет, например на сайте http://celestrak.com/NORАD/elements/. Траекторию полета космического аппарата по набору элементов TLE с необходимой точностью можно вычислить используя известные модели SDP8, SGP9 и др [3].
Таким образом, рассчитанные и полученные данные позволяют вычислить интервал видимости AT скрываемого объекта, между моментом входа А космического аппарата в зону видимости скрываемого объекта и моментом выхода В (фиг. 3).
Источники информации
1. Королев А.Ю., Королева А.А., Яковлев А.Д. Маскировка вооружения, техники и объектов. - СПб: Университет ИТМО, 2015. - 155 с.
2. Меньшаков Ю.К. Техническая разведка из космоса. - М.: Academia, 2013. - 656 с.: ил.
3. SPACETRACK REPORT NO.3. Models for Propagation of NORAD Element Sets. Felix R. Hoots. Ronald L. Roehrich. December 1980.
Использование: изобретение относится к области противодействия техническим средствам разведки и предназначено для оценки видимости скрываемых (маскируемых) наземных объектов в условиях естественных и искусственных масок от технических средств видовой разведки космического базирования. Сущность: благодаря расчету интервалов видимости скрываемого объекта для определенного космического аппарата видовой разведки на основании данных о текущем времени, траектории полета данного космического аппарата, географических координатах скрываемого объекта, а также координат непрозрачных элементов окружающего пространства. Координаты непрозрачных элементов определяют путем сканирования лазерным сенсором верхней полусферы пространства относительно точки нахождения объекта на поверхности Земли по углам азимута и углам места. Применение лазерных сенсоров значительно сокращает временные затраты на оценку видимости объекта, а использование цифровой модели окружающего пространства повышает точность оценки за счет возможности применения средств вычислительной техники для расчета видимости объекта со всех ракурсов возможных пролетов средств разведки. Технический результат: сокращение временных затрат и повышение точности оценки видимости объекта из космоса. 3 ил.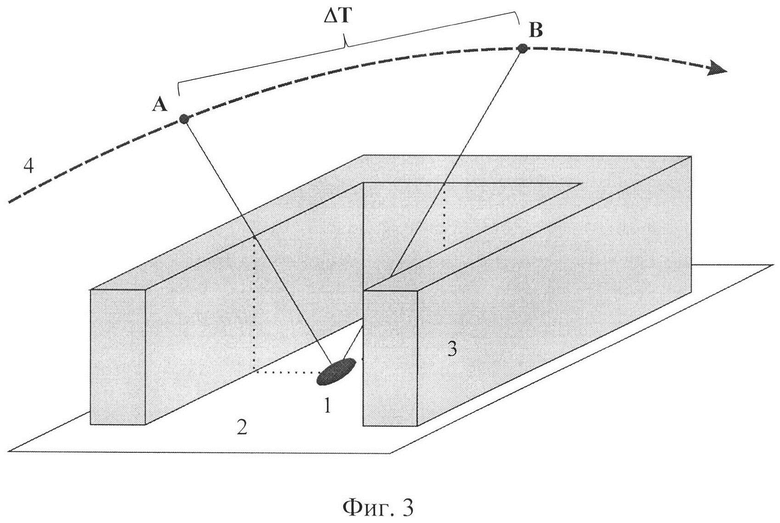
Способ оценки видимости наземного объекта из космоса, заключающийся в определении факта видимости наземного объекта в условиях естественных и искусственных масок, отличающийся тем, что определяют координаты непрозрачных элементов окружающего пространства путем сканирования лазерным сенсором верхней полусферы пространства относительно точки нахождения объекта на поверхности Земли по углам азимута и углам места, на основании полученных данных, а также данных о текущем времени, траектории полета, по крайней мере, одного космического аппарата видовой разведки, географических координатах скрываемого объекта, рассчитывают интервалы видимости скрываемого объекта для данного космического аппарата разведки.
| Способ создания глобальной информационной среды в околоземном пространстве и многофункциональная космическая информационная система "Парадигма" на базе сети низкоорбитальных космических аппаратов для его осуществления | 2018 |
|
RU2707415C2 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| WO 2004104633 A3, 20.01.2005. | |||

