ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к машине, такой как воздушное судно, оснащенному винтомоторной установкой, включающей в себя электрический двигатель и тепловой двигатель.
УРОВЕНЬ ТЕХНИКИ
Из предшествующего уровня техники известны машины, такие как воздушные суда, которые содержат винтомоторную установку со следующей конфигурацией. Винтомоторная установка содержит винт, электрический двигатель, позволяющий приводить во вращение винт, батарею, обеспечивающую питание электрического двигателя, и тепловой двигатель, связанный с генератором переменного тока, позволяющим подзаряжать батарею.
Однако в случае неисправности в электрической цепи управления, которая содержит батарею и электрический двигатель, винт не может больше работать.
Такая конфигурация винтомоторной установки создает большие проблемы безопасности, в частности, при взлете.
Из документов DE102012021340, EP2964524 и US2010/219779 известны также винтомоторные установки, конфигурации которых создают проблемы габарита и/или веса.
Задача настоящего изобретения состоит в том, чтобы предложить новое машина, позволяющее преодолеть все или часть вышеупомянутых проблем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно варианту выполнения, предложена машина, такая как воздушное судно, оснащенное винтомоторной установкой, которая содержит:
- тепловую силовую установку, которая содержит тепловой двигатель и вал, называемый выходным валом теплового двигателя и выполненный с возможностью своего приведения во вращение от теплового двигателя;
- электрическую силовую установку, содержащую электрический двигатель;
- систему электрического питания, содержащую батарею, обеспечивающую питание электрического двигателя;
- пропеллерную систему, содержащую винт и вал, называемый валом винта, с которым связан винт;
при этом винтомоторная установка содержит также систему сцеплений, выполненную с возможностью обеспечения по выбору:
- приведения во вращение винта при помощи теплового двигателя без передачи вращения от электрического двигателя на винт;
- приведения во вращение винта при помощи электрического двигателя без передачи вращения от теплового двигателя на винт;
- приведения во вращение винта посредством комбинированной передачи движения вращения от теплового двигателя на винт и движения вращения от электрического двигателя на винт;
при этом винтомоторная установка содержит вал, называемый промежуточным валом, жестко соединенный с валом винта или выполненный с возможностью соединения во вращении с валом винта,
при этом система сцеплений содержит:
- первое сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от теплового двигателя на промежуточный вал, и
- второе сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от промежуточного вала на вал винта, и/или третье сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от электрического двигателя на вал винта;
при этом электрический двигатель содержит статор и ротор, при этом ротор установлен с возможностью вращения вокруг промежуточного вала и внутри статора, при этом ротор и промежуточный вал являются коаксиальными.
Такая концепция машины с ротором, установленным коаксиально и с возможностью вращения вокруг оси промежуточного вала, который является частью системы передачи движения, позволяет получить выигрыш в компактности и в весе (за счет ограничения числа деталей), что позволяет увеличить соотношение производимая мощность (кВт)/вес (кг). Действительно, промежуточный вал расположен внутри ротора, и упомянутый промежуточный вал, который является частью механической линии трансмиссии, является коаксиальным с осью вращения ротора. Согласно отличительному признаку, упомянутый промежуточный вал является также коаксиальным с валом винта, и система сцеплений позволяет соединять/разъединять промежуточный вал и вал винта.
Согласно отличительному признаку, каждый вал, который является частью системы передачи движения на винт, является коаксиальным с валом винта.
Согласно отличительному признаку, статор выполнен в виде полого тела и оснащен обмоткой, и ротор оснащен магнитами.
Согласно отличительному признаку, винтомоторная установка содержит также механическую систему трансмиссии типа эпициклической передачи, которая содержит:
- внутренний вал, называемый солнцем, соответствующий части промежуточного вала, и коронную шестерню, выполненную внутри полого тела ротора;
- сателлит, установленный между солнцем и коронной шестерней, и водило, конец которого, противоположный к сателлиту, соединен во вращении с частью второго сцепления, при этом второе сцепление содержит другую часть, соединенную во вращении с валом винта.
Согласно отличительному признаку, система сцеплений содержит четвертое сцепление, выполненное таким образом, чтобы в сомкнутом состоянии передавать вращение от теплового двигателя на электрический двигатель для обеспечения его работы в режиме генератора.
Согласно отличительному признаку, различные валы, которые участвуют в системе передачи движения, между, с одной стороны, тепловым двигателем и/или электрическим двигателем и, с другой стороны, валом винта, являются коаксиальными. Иначе говоря, каждый вал, образующий часть системы передачи движения на вал винта, является коаксиальным с валом винта.
Согласно отличительному признаку, статор выполнен в виде полого тела, оснащенного обмоткой и/или магнитами предпочтительно на своей внутренней стороне, и ротор оснащен магнитами и/или обмоткой предпочтительно на своей наружной периферической стороне.
Согласно варианту выполнения, предложена машина, такая как воздушное судно, оснащенное винтомоторной установкой, которая содержит:
- тепловую силовую установку, содержащую тепловой двигатель и вал, называемый выходным валом теплового двигателя и выполненный с возможностью своего приведения во вращение от теплового двигателя;
- электрическую силовую установку, содержащую электрический двигатель;
- систему электрического питания, содержащую батарею, обеспечивающую питание электрического двигателя;
- пропеллерную систему, содержащую винт и вал, называемый валом винта, с которым связан винт;
в котором
винтомоторная установка содержит также систему сцеплений, выполненную с возможностью обеспечения по выбору:
- приведения во вращение винта при помощи теплового двигателя без передачи вращения от электрического двигателя на винт;
- приведения во вращение винта при помощи электрического двигателя без передачи вращения от теплового двигателя на винт;
- приведения во вращение винта посредством комбинированной передачи движения вращения от теплового двигателя на винт и движения вращения от электрического двигателя на винт.
Пропеллерная система машины может также приводиться во вращение независимо или одновременно электрической силовой установкой и/или тепловой силовой установкой. Таким образом, повышается безопасность, в частности, при взлете, так как в случае возникновения проблемы в электрической системе трансмиссии тепловая силовая установка может заменить ее для приведения во вращение винта.
Кроме того, возможность применения только электрического режима движения позволяет воздушному судну взлетать и приземляться на городских или близлежащих аэродромах с меньшим шумовым воздействием.
Машина может иметь один или несколько следующих признаков, рассматриваемых в любой технически возможной комбинации.
Согласно отличительному признаку, винтомоторная установка содержит вал, называемый промежуточным валом, жестко соединенный или выполненный с возможностью соединения во вращении с валом винта, при этом система сцеплений содержит:
- первое сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от теплового двигателя на промежуточный вал, и
- второе сцепление и/или третье сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от электрического двигателя на вал винта.
Согласно отличительному признаку, второе сцепление позволяет передавать в сомкнутом состоянии вращение от промежуточного вала на вал винта.
Согласно отличительному признаку, система сцеплений содержит четвертое сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от теплового двигателя на электрический двигатель для обеспечения его работы в режиме генератора.
Согласно отличительному признаку, электрический двигатель содержит:
- статор, выполненный в виде полого тела и оснащенный обмоткой на своей внутренней стороне;
- ротор, выполненный в виде тела, вращающегося вокруг промежуточного вала и внутри статора, при этом ротор оснащен магнитами на своей наружной периферической стороне.
Согласно отличительному признаку, винтомоторная установка содержит систему трансмиссии, содержащую, например, сцепление, позволяющее передавать движение вращения между ротором и промежуточным валом.
Согласно отличительному признаку, винтомоторная установка содержит механическую систему трансмиссии, позволяющую передавать вращение от промежуточного вала на вал винта в сомкнутом состоянии второго сцепления, если последнее присутствует. Согласно отличительному признаку, механическая система трансмиссии является редукторной системой.
Предпочтительно механическая система трансмиссии расположена в роторе.
Например, механическая система трансмиссии содержит эпициклическую передачу с частью, связанной с промежуточным валом, и с частью, связанной с частью второго сцепления, при этом другая часть второго сцепления связана с валом винта.
Согласно отличительному признаку, второе сцепление содержит часть, связанную во вращении с промежуточным валом, например, через механическую систему трансмиссии, и часть, связанную и предпочтительно жестко соединенную во вращении с валом винта.
Согласно отличительному признаку, четвертое сцепление содержит часть, которая в сомкнутом состоянии первого сцепления жестко соединена во вращении с выходным валом теплового двигателя, и другую часть, которая жестко соединена во вращении с ротором электрического двигателя.
Согласно отличительному признаку, третье сцепление содержит часть, жестко соединенную во вращении с ротором электрического двигателя через механическую систему трансмиссии, и часть, жестко соединенную во вращении с винтом.
Согласно отличительному признаку, система электрического питания содержит также электрическую систему управления, которая содержит:
- блок высокого напряжения, который позволяет размыкать или замыкать цепь питания между батареей и электрическим двигателем;
- контроллер, который позволяет обрабатывать ток, выдаваемый батареей или производимый электрическим двигателем, когда он работает в режиме генератора.
Согласно варианту выполнения, предложено машина, такая как воздушное судно, оснащенное винтомоторной установкой, которая содержит:
- тепловую силовую установку, содержащую тепловой двигатель и вал, называемый выходным валом теплового двигателя и выполненный с возможностью своего приведения во вращение от теплового двигателя;
- электрическую силовую установку, содержащую электрический двигатель;
- систему электрического питания, содержащую батарею, обеспечивающую питание электрического двигателя;
- пропеллерную систему, содержащую винт и вал, называемый валом винта, с которым связан винт;
при этом винтомоторная установка содержит также систему сцеплений, выполненную с возможностью обеспечения по выбору:
- приведения во вращение винта при помощи теплового двигателя без передачи вращения от электрического двигателя на винт;
- приведения во вращение винта при помощи электрического двигателя без передачи вращения от теплового двигателя на винт;
- приведения во вращение винта посредством комбинированной передачи движения вращения от теплового двигателя на винт и движения вращения от электрического двигателя на винт;
при этом винтомоторная установка содержит вал, называемый промежуточным валом, выполненный с возможностью соединения во вращении с валом винта,
и система сцеплений содержит:
- первое сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от теплового двигателя на промежуточный вал, и
- второе сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от промежуточного вала на вал винта;
при этом электрический двигатель содержит:
- статор, выполненный в виде полого тела и предпочтительно оснащенный обмоткой, например, на своей внутренней стороне,
- ротор, выполненный в виде тела, вращающегося вокруг промежуточного вала и внутри статора, при этом ротор предпочтительно оснащен магнитами, например, на своей наружной периферической стороне;
при этом винтомоторная установка содержит также механическую систему трансмиссии типа эпициклической передачи, которая содержит:
- внутренний вал, называемый солнцем, соответствующий части промежуточного вала, и коронную шестерню, выполненную внутри полого тела ротора;
- сателлит, установленный между солнцем и коронной шестерней, и водило, с которым жестко соединен сателлит, который является коаксиальным с промежуточным валом и с валом винта, при этом конец водила, противоположный к сателлиту, соединен во вращении с частью второго сцепления, при этом второе сцепление содержит другую часть, соединенную во вращении с валом винта.
Согласно отличительному признаку, можно считать, что механическая система трансмиссии типа эпициклической передачи включена в электрический двигатель в том смысле, что она расположена в роторе.
Согласно отличительному признаку, система сцеплений содержит третье сцепление, выполненное с возможностью передавать в сомкнутом состоянии вращение от электрического двигателя и, в частности, от ротора на вал винта.
Согласно варианту выполнения, предложен способ пилотирования описанной выше машины, в котором при электрическом режиме движения машины, в частности, во время фазы взлета и/или набора высоты сцепления приводятся в следующую конфигурацию:
- первое сцепление разомкнуто для отсоединения теплового двигателя от винта;
- четвертое сцепление, если оно присутствует, и второе сцепление предпочтительно разомкнуты;
- третье сцепление, если оно присутствует, сомкнуто для передачи движения от электрического двигателя на винт.
Согласно варианту выполнения предложен способ пилотирования описанной выше машины, в котором при тепловом режиме движения без использования электрической силовой установки, например, когда на электрической цепи трансмиссии появляется неисправность, сцепления приводятся в следующую конфигурацию:
- первое сцепление сомкнуто;
- второе сцепление сомкнуто для передачи движения от теплового двигателя на винт.
Согласно варианту выполнения, предложен способ пилотирования описанной выше машины, в котором при движении с совместным использованием теплового двигателя и электрического двигателя сцепления приводятся в следующую конфигурацию:
- первое сцепление сомкнуто;
- второе сцепление сомкнуто для передачи движения от теплового двигателя на винт,
- третье сцепление, если оно присутствует, сомкнуто для передачи движения от электрического двигателя на винт,
- четвертое сцепление, если оно присутствует, разомкнуто.
Согласно варианту выполнения, предложен способ пилотирования описанной выше машины, в котором для подзарядки батареи при помощи теплового двигателя при одновременном сохранении вращения винта, например, для подзарядки во время полета машины, сцепления приводятся в следующую конфигурацию:
первое сцепление, четвертое сцепление и второе сцепление сомкнуты, при этом тепловой двигатель вращает промежуточный вал для приведения во вращение ротора, предпочтительно оснащенного магнитами, напротив статора, предпочтительно оснащенного обмоткой, чтобы генерировать ток (в обмотке), одновременно вращая вал винта;
при этом электрическая система управления контролирует ток, производимый электрическим двигателем, работающим в режиме генератора, для подзарядки батареи.
Согласно варианту выполнения, предложен способ пилотирования описанной выше машины, в котором для рекуперации энергии за счет приводного ветрового или водяного эффекта сцепления приводятся в следующую конфигурацию:
- по меньшей мере одно среди первого сцепления и четвертого сцепления разомкнуто для отсоединения винта от теплового двигателя или для отсоединения ротора от теплового двигателя;
- предпочтительно второе сцепление разомкнуто;
- третье сцепление сомкнуто для передачи движения от винта на ротор электрического двигателя.
Согласно варианту выполнения предложен способ пилотирования описанной выше машины, в котором для подзарядки батареи при помощи теплового двигателя без вращения винта сцепления приводятся в следующую конфигурацию:
- размыкание третьего сцепления и второго сцепления,
- смыкание первого сцепления и четвертого сцепления,
таким образом, чтобы тепловой двигатель вращал промежуточный вал для приведения во вращение ротора, предпочтительно оснащенного магнитами, напротив статора, предпочтительно оснащенного обмоткой, чтобы генерировать ток (в обмотке), при этом электрическая система управления контролирует ток, производимый электрическим двигателем, работающим в режиме генератора, для подзарядки батареи.
Согласно варианту выполнения предложен способ пилотирования описанной выше машины, в котором машина содержит колеса, оснащенные электрическим приводом, соединенным с батареей питания машины через электрическую систему управления, при этом способ включает в себя питание электрического привода колес от электрической батареи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
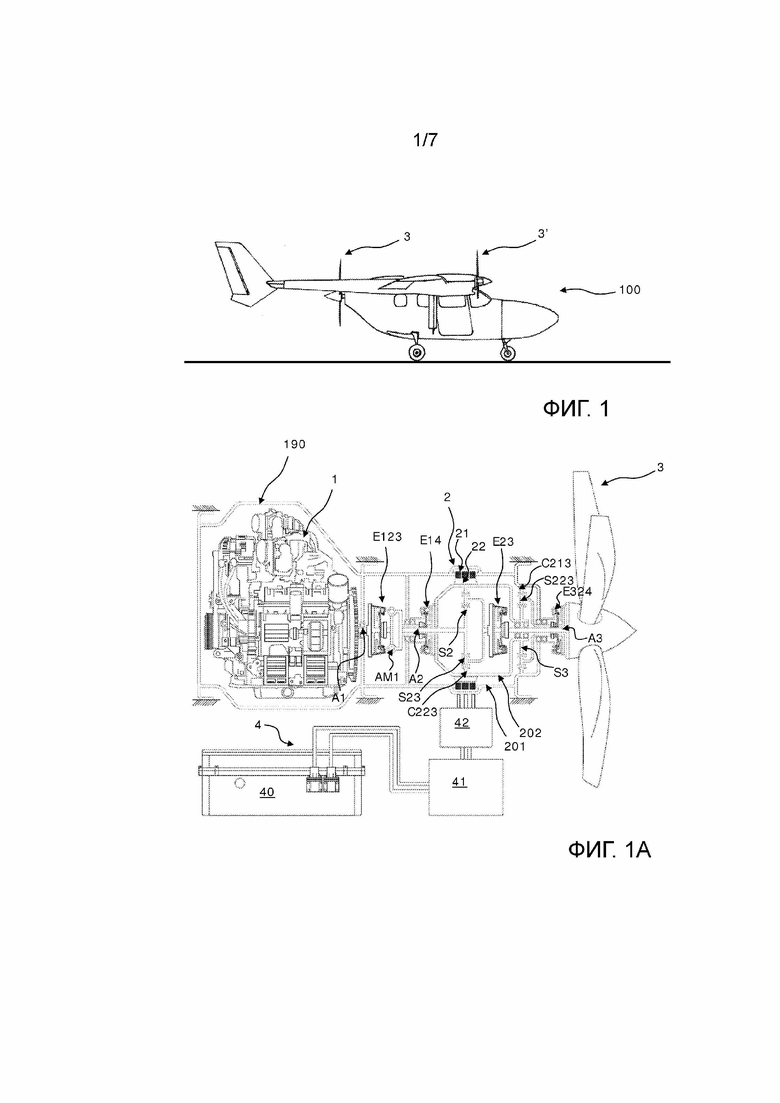
Фиг. 1 - схематичный вид воздушного судна согласно варианту выполнения изобретения.
Фиг. 1А - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения.
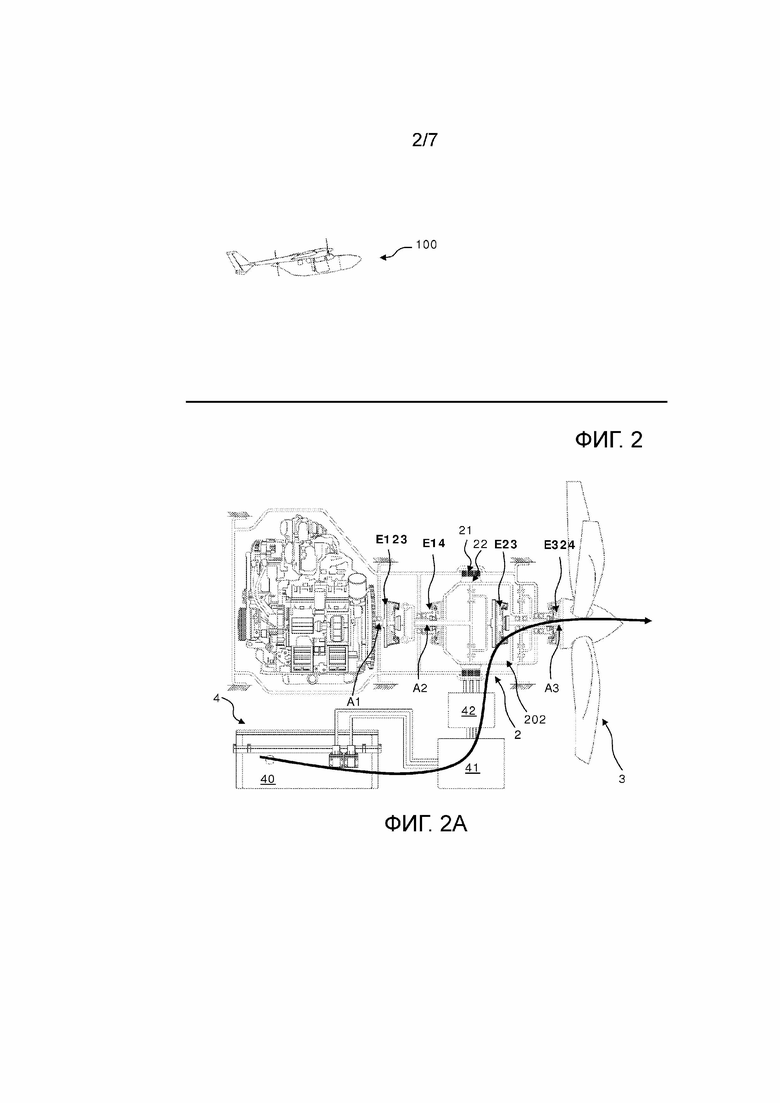
Фиг. 2 - схематичный вид воздушного судна согласно варианту выполнения изобретения во время взлета и/или набора высоты.
Фиг. 2А - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения в электрическом режиме движения.
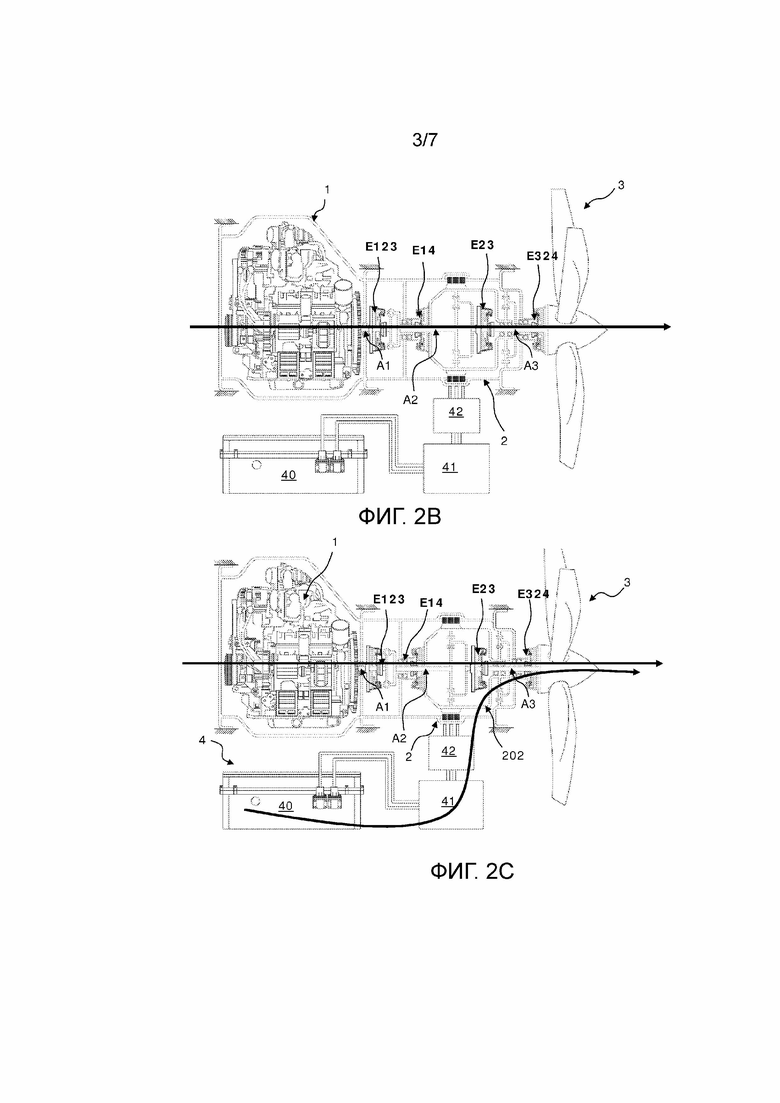
Фиг. 2В - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения в тепловом режиме движения.
Фиг. 2С - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения в тепловом и электрическом режиме движения.
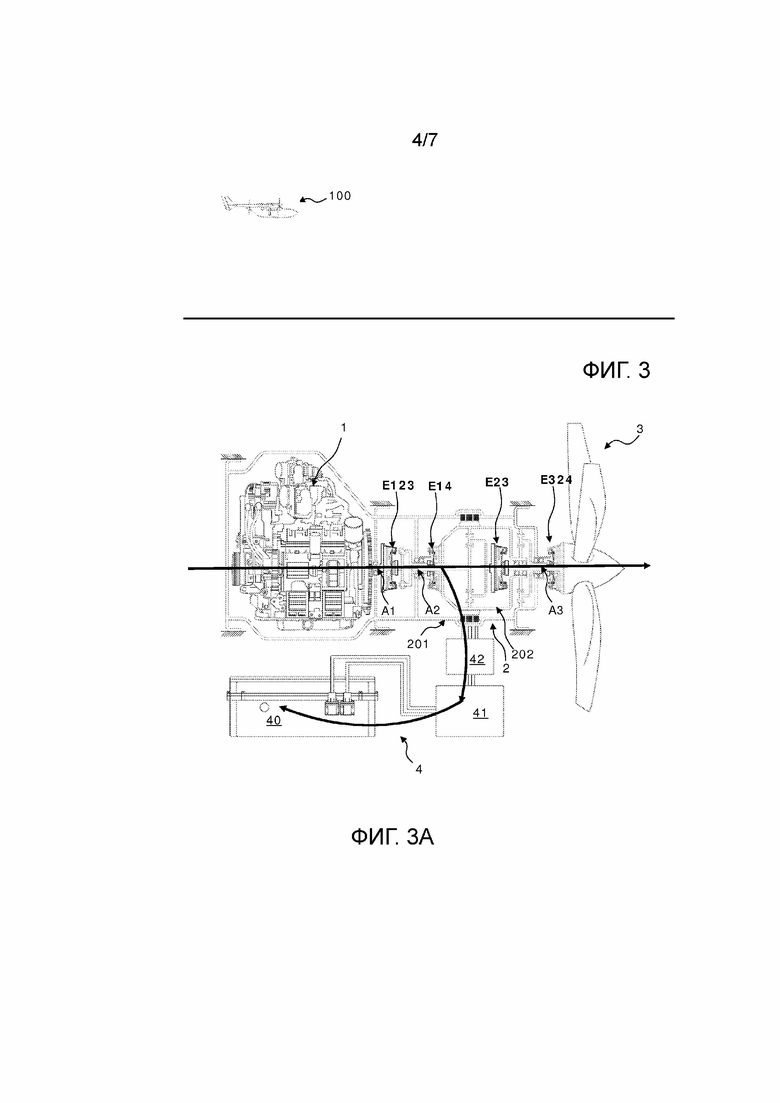
Фиг. 3 - схематичный вид воздушного судна согласно варианту выполнения изобретения во время его полета, например, во время горизонтального полета.
Фиг. 3А - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения в режиме подзарядки в воздухе.
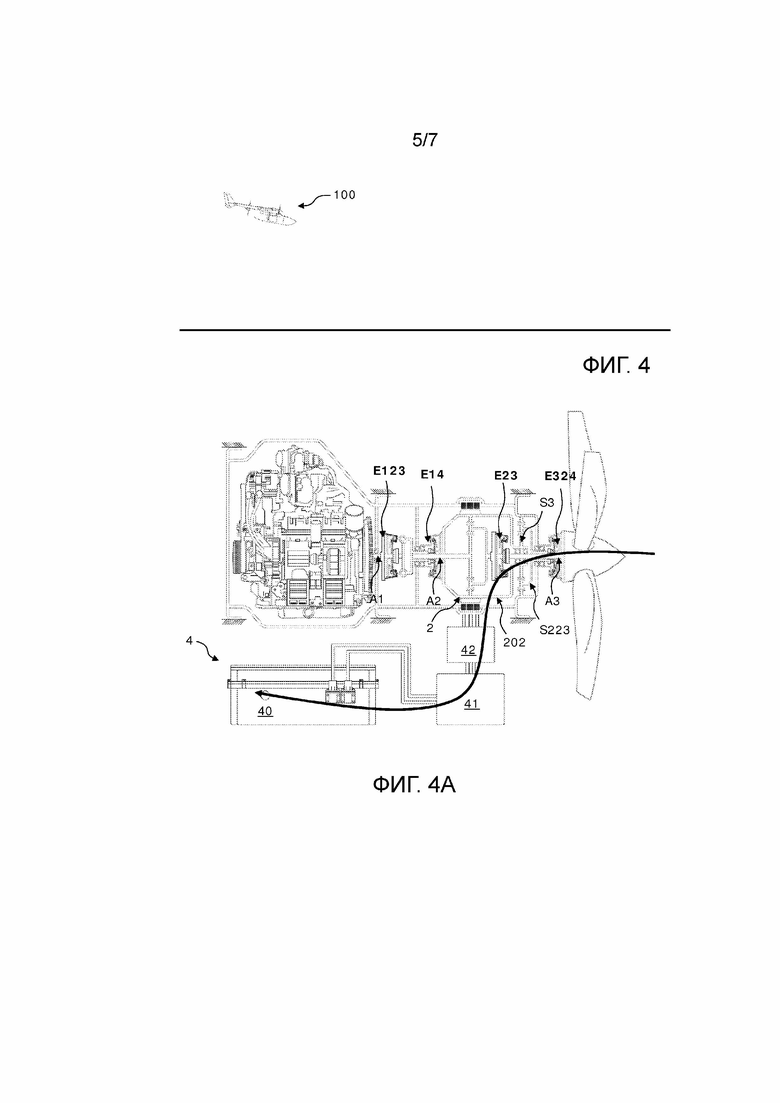
Фиг. 4 - схематичный вид воздушного судна согласно варианту выполнения изобретения во время снижения воздушного судна.
Фиг. 4А - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения в режиме рекуперации электрической энергии.
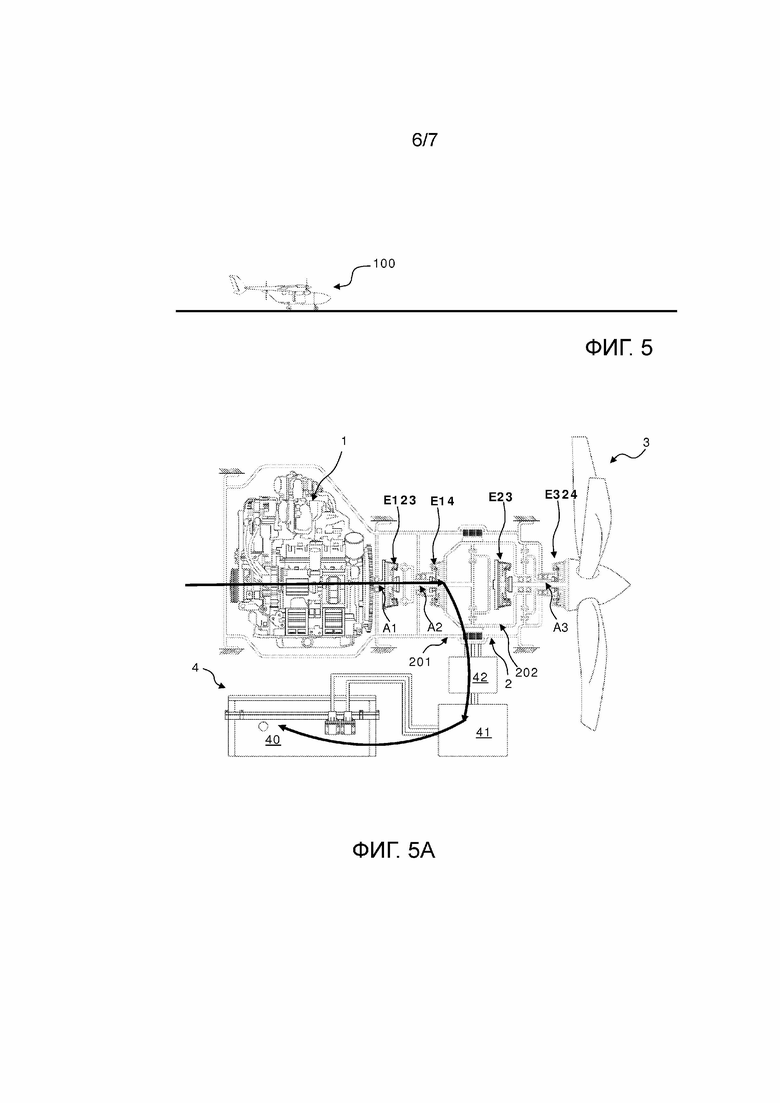
Фиг. 5 - схематичный вид воздушного судна согласно варианту выполнения изобретения, при этом воздушное судно находится на земле.
Фиг. 5А - схематичный вид винтомоторной установки воздушного судна согласно варианту выполнения изобретения в режиме подзарядки через его тепловой двигатель, когда воздушное судно находится на земле.
Фиг. 6 - схематичный вид версии винтомоторной установки.
ПОДРОБНОЕ ОПИСАНИЕ
Изобретение более полно описано со ссылками на прилагаемые чертежи, на которых представлены варианты выполнения изобретения. На чертежах относительный размер элементов может быть преувеличен для большей ясности. На всех чертежах подобные элементы имеют одинаковые обозначения. Вместе с тем, изобретение можно применять в разных версиях и его не следует рассматривать как ограниченное представленными в данном случае вариантами выполнения. Эти варианты выполнения предложены таким образом, чтобы это описание было полным, и они показывают объем изобретения для специалистов в данной области. Представленные ниже варианты выполнения для упрощения рассматриваются в связи с терминологией и конструкцией воздушного судна. Как будет пояснено ниже, машина может быть также морским судном.
Во всем тексте ссылка на «вариант выполнения» означает, что функция, конструкция или отдельный признак, описанный в связи с вариантом выполнения, включен по меньшей мере в один вариант выполнения настоящего изобретения. Так, появление выражения «в варианте выполнения» в разных местах заявки не обязательно относится к одному и тому же варианту выполнения. Кроме того, функции, конструкции или отдельные признаки можно комбинировать любым соответствующим образом в одном или нескольких вариантах выполнения.
На фиг. 1 показано машина, которая является винтомоторным воздушным судном 100. Воздушное судно является, например, самолетом, беспилотным летательным аппаратом или вертолетом.
Воздушное судно 100 содержит винтомоторную установку, называемую также силовым модулем, которая содержит картер 190 и пропеллерную систему, тепловую силовую установку и электрическую силовую установку. Как показано на фиг. 1-5 и как будет пояснено ниже, в картере 190 находятся тепловая силовая установки, ротор 200 электрического двигателя, статор 201, образованный частью картера 190.
Винтомоторную установку может также применять для движения на воде, и машина может быть морским судном. Пропеллерная система содержит винт 3 и вал А3 винта, на котором закреплен винт 3.
Например, тепловой двигатель и/или электрический двигатель могут приводить во вращение одну или несколько других дополнительных пропеллерных систем 3’, как схематично показано на фиг. 1. Этот тип конфигурации можно назвать «распределением тяги».
Тепловая силовая установка содержит тепловой двигатель 1, который имеет выходной вал А1, приводимый во вращение тепловым двигателем. Тепловой двигатель может вращаться, например, со скоростью порядка 6000 об/мин.
Согласно отличительному признаку, винтомоторная установка содержит демпфер крутящего момента, позволяющий корректировать/сглаживать ацикличность теплового двигателя.
Электрическая силовая установка содержит электрический двигатель 2. Электрический двигатель 2 может вращаться, например, со скоростью порядка 6000 об/мин. Электрическая силовая установка содержит также систему 4 электрического питания, которая включает в себя батарею 40, обеспечивающую питание электрического двигателя 2.
Редукторная система, например, эпициклическая передача, которая будет описана ниже, позволяет винту вращаться с более низкой скоростью, например, порядка 2000 об/мин.
Система 4 электрического питания содержит также электрическую систему 41, 42 управления, которая включает в себя блок 41 высокого напряжения, позволяющий размыкать или замыкать цепь питания между батареей 40 и электрическим двигателем 2. Система 4 электрического питания содержит также контроллер 42, который позволяет обрабатывать ток, выдаваемый батареей 40 или производимы электрическим двигателем 2, когда он работает в режиме генератора.
Например, контроллер 42 может преобразовывать постоянный ток, поступающий от батареи 40, в переменный ток, например, разделяя его для питания электрического двигателя 2, и, наоборот, преобразовывать переменный ток, производимый электрическим двигателем 2, в постоянный ток для подзарядки батареи 40, когда электрический двигатель 2 работает в режиме генератора, в частности, когда, как будет пояснено ниже, ротор электрического двигателя 2 вращается от теплового двигателя 1 или от винта 3.
Винтомоторная установка содержит также систему сцеплений, выполненную таким образом, что может иметь несколько конфигураций, что будет описано ниже.
Как будет пояснено ниже, выполнение электрической силовой установки, тепловой силовой установки и пропеллерной системы в комбинации с системой сцеплений позволяет выборочно:
- приводить во вращение пропеллерную систему 3 для обеспечения движения воздушного судна при помощи только теплового двигателя 1;
- приводить во вращение пропеллерную систему 3 в направлении движения воздушного судна при помощи только теплового двигателя 1 и вращать электрический двигатель 2 для подзарядки батареи и, возможно, одной или нескольких других батарей при помощи теплового двигателя 1;
- приводить во вращение пропеллерную систему 3 для обеспечения движения воздушного судна при помощи только электрической силовой установки 2;
- приводить во вращение пропеллерную систему 3 при помощи движения вращения выходного вала теплового двигателя 1, передаваемого на вал винта, и движения вращения электрического двигателя 2, тоже передаваемого на вал винта (или винт 3). Иначе говоря, в этом случае вращение винта происходит в результате передачи на вал А3 винта (или винт 3) комбинированного движения вращения теплового двигателя и электрического двигателя.
Согласно варианту выполнения система сцеплений винтомоторной установки имеет конфигурацию, позволяющую вращать электрический двигатель 2 для подзарядки батареи 40, когда винт 3 вращается за счет приводного ветрового (или водяного) эффекта.
Система сцепления может содержать сцепления фрикционного типа или кулачкового типа.
Винтомоторная установка содержит промежуточный вал А2. Как показано на фигурах, промежуточный вал А2 установлен между выходным валом 1 и валом А3 винта. Кроме того, промежуточный вал А2 расположен в роторе 202.
Система сцеплений согласно варианту выполнения, показанному на фиг. 1-5
В варианте выполнения, представленном на фиг. 1-5, вал А2 выполнен с возможностью быть соединенным (связанным) во вращении с валом А3 винта через сцепление Е23. В альтернативном варианте выполнения, показанном на фиг. 6 и описанном ниже, вал А2 соответствует участку упомянутого вала А3 винта.
Система сцеплений содержит сцепление Е123, которое в сомкнутом состоянии передает вращение от теплового двигателя 1 на промежуточный вал А2. В разомкнутом состоянии сцепления Е123 вращение тепловой силовой установки 1 не передается на промежуточный вал А2. Сцепление Е123 находится между выходным валом А1 теплового двигателя и промежуточным валом А2.
Система сцеплений содержит также сцепление Е324, которое в сомкнутом состоянии передает вращение от электрического двигателя 2, в частности, от ротора 202, на винт 3. В разомкнутом состоянии сцепления Е324 ротор 202 не связан во вращении с винтом 3 или с валом А3 винта (в частности, когда сцепление Е14 и/или Е23 разомкнуто).
Система сцеплений содержит сцепление Е23, которое в сомкнутом состоянии позволяет передавать вращение от промежуточного вала А2 на вал А3 винта, предпочтительно через редукторную систему.
Сцепление Е23 позволяет передавать на вал А3 винта вращение от промежуточного вала А2, которое является результатом вращения выходного вала А1 в сомкнутом состоянии сцепления Е123 и/или является результатом вращения ротора 202 в сомкнутом состоянии сцепления Е14.
Размыкание сцеплений позволяет прервать соответствующую передачу движения.
В примере, представленном на фиг. 1-5, система сцеплений содержит сцепление Е14, первая часть которого в сомкнутом состоянии первого сцепления Е123 соединена во вращении с выходным валом А1 теплового двигателя 1. Упомянутая первая часть сцепления Е14 жестко соединена во вращении с частью промежуточного вала А2. Вторая часть сцепления Е14 жестко соединена во вращении с ротором 202 электрического двигателя 2.
В примере, представленном на фиг. 1-5, сцепление Е324 имеет часть, связанную (во вращении) с ротором 202 электрического двигателя 2 через механическую систему трансмиссии с зубчатыми передачами S3, S223, C213, а его другая часть жестко соединена во вращении с винтом 3 (или с валом винта). В частности, упомянутая другая часть соединена с основанием носка винта 3, называемого также площадкой винта. Таким образом, сцепление Е324 позволяет передавать вращение от ротора 202 электрического двигателя 2 на винт (или на вал А3 винта, жестко соединенный с винтом).
В сомкнутом состоянии сцепление Е324 обеспечивает вращение электрического двигателя 2 от винта 3, когда последний приводится во вращение действующим на него наружным потоком (ветровой или водяной эффект).
Механическая система трансмиссии S3, S223, C213 является системой трансмиссии через зубчатые колеса. Предпочтительно система трансмиссии представляет собой эпицклическую передачу. Эпициклическая передача содержит внутренний вал S3, называемый солнцем и соответствующий части ротора 202 электрического двигателя 2, и коронную шестерню С213, выполненную внутри полого тела статора 201 (описан ниже), и сателлит S223, расположенный между солнцем S3 и коронной шестерней С213. Сателлит S223 жестко соединен с водилом, которое является коаксиальным с валом А3 винта. Конец водила, противоположный к сателлиту S223, жестко соединен во вращении с частью сцепления Е324.
Сцепление Е23 содержит часть, связанную (во вращении) с промежуточным валом А2 через механическую систему трансмиссии с зубчатыми передачами S3, S223, C213, и другую часть, соединенную во вращении с валом А3 винта.
В примере, представленном на фиг. 1-5, механическая система трансмиссии S2, S23, C223 является системой трансмиссии через зубчатые колеса. Предпочтительно система трансмиссии представляет собой эпицклическую передачу. Эпициклическая передача содержит внутренний вал S2, называемый солнцем и соответствующий части промежуточного вала А2, и коронную шестерню С223, выполненную внутри полого тела ротора. Сателлит S23 расположен между солнцем S2 и коронной шестерней С223. Сателлит S23 жестко соединен с водилом, которое является коаксиальным с промежуточным валом А2 и с валом А3 винта. Конец водила, противоположный к сателлиту S23, жестко соединен во вращении с частью сцепления Е23.
Электрическая силовая установка согласно варианту выполнения, показанному на фиг. 1-5
В варианте выполнения, показанном на фиг. 1-5, электрический двигатель 2 содержит статор 201 и ротор 202. Статор 201 имеет полое тело, оснащенной обмоткой 21 на своей внутренней стороне. В примере, представленном на фиг. 1-5, статор 201 является частью картера 190.
Ротор 202 имеет тело, вращающееся вокруг оси (продольной) промежуточного вала А2 и внутри статора 201. В соответствии с состоянием конфигурации системы сцеплений ротор может вращаться вокруг промежуточного вала А2 относительно упомянутого промежуточного вала или может вращаться вместе с упомянутым промежуточным валом А2 вокруг упомянутой оси (продольной) промежуточного вала А2. Предпочтительно ротор 202 оснащен магнитами 22 на своей наружной периферической стороне.
Приведение во вращение промежуточного вала А2 от выходного вала двигателя 1 или от вращения ротора 202 электрического двигателя 2 позволяет привести во вращение сателлит S23, а также водило, связанное со сцеплением Е23. Смыкание сцепления Е23 позволяет передать это вращение на вал А3 винта для приведения во вращение винта 3.
Таким образом, вращение промежуточного вала А2 может быть передано на вал А3 винта и, следовательно, на винт 3 при смыкании сцепления Е23.
Кроме того, смыкание сцепления Е324 позволяет передавать движение вращения между ротором 202 электрического двигателя 2 и винтом 3.
Согласно отличительному признаку, система сцеплений Е123, Е14, Е23, Е324 выполнена также таким образом, что может иметь конфигурацию, в которой винт 3, приводимый во вращение за счет приводного ветрового или водяного эффекта, передает свое движение вращения на электрический двигатель 2 для генерирования электрического тока, позволяющего подзарядить батарею 40.
Согласно отличительному признаку, одно из сцеплений Е14, Е324 является разомкнутым, тогда как другое сцепление Е324, Е14 является сомкнутым.
Можно предусмотреть установку части или каждой из частей сцепления, жестко соединенных во вращении с валом, с возможностью перемещения скольжением, например, при помощи шлиц на упомянутом валу для перехода из сомкнутого положения в разомкнутое положение и наоборот.
Способ пилотирования
Описанная выше винтомоторная установка позволяет применять различные способы пилотирования воздушного судна посредством адаптации конфигурации сцеплений.
В примере, представленном на фиг. 2А, 2В, 2С, 3А, 4А, 5А, для упрощения сцепления показаны в разомкнутом положении. Тем не менее, представленное ниже описание уточняет реальную, разомкнутую или сомкнутую, конфигурацию каждого из упомянутых сцеплений в зависимости от применяемого способа пилотирования. Кроме того, добавлены стрелки (отдельно от стрелок, указывающих на цифровые позиции) для отображения цепи передачи движения, которая является активной, и, в случае необходимости, электрического тока, выдаваемого или получаемого системой электрического питания.
Для оптимального использования воздушного судна во время фазы взлета и/или набора высоты винтомоторная установка позволяет производить движение воздушного судна в электрическом режиме.
В примере, представленном на фиг. 2 и 2А, сцепления приведены в следующую конфигурацию. Сцепление Е123 разомкнуто для отсоединения теплового двигателя 1 от винта 3. Предпочтительно сцепление Е14 и сцепление Е23 являются разомкнутыми. Сцепление Е324 сомкнуто для передачи движения от электрического двигателя 2 на винт 3. Стрелка показывает, что движение вращения ротора 202 электрического двигателя 2, электрически питаемого батареей 40, передается на винт 3 через сцепление Е324.
В случае неисправности в электрической системе трансмиссии винтомоторная установка позволяет использовать тепловой режим движения без использования электрической силовой установки.
Так, в примере, представленном на фиг. 2В, сцепления могут быть приведены в конфигурацию, в которой сцепление Е123 и сцепление Е23 сомкнуты для передачи движения от теплового двигателя 1 на винт 3. Движение от теплового двигателя 1 передается на винт 3 через валы А1, А2 и А3. Согласно признаку, представленному для варианта выполнения на фиг. 2В, сцепление Е14 и сцепление Е324 разомкнуты, чтобы избежать вращения ротора 202 электрического двигателя 2. Стрелкой показано, что тепловой двигатель 1 передает свое движение вращения на винт 3 через сцепления Е123 и Е23.
Неисправность может появиться, например, в результате перегрева батареи, нарушения работы компонента электрической системы трансмиссии. Вследствие этого ротор электрического двигателя перестает вращаться.
Как было указано выше, в случае неисправности на электрической цепи трансмиссии для безопасности можно разомкнуть Е324 и предпочтительно Е14, чтобы снизить риск дополнительной электрической проблемы, которая может возникнуть в результате вращения ротора 202 в одном или другом направлении.
Неисправность можно обнаруживать в зависимости от следующих критериев, которые можно рассматривать или нет в любой технически возможной комбинации:
- уменьшение электрической мощности по отношению к пороговому значению,
- понижение скорости вращения,
- уменьшение наклона траектории,
- понижение скорости движения воздушного судна,
- необычное повышение силы тока.
Если обнаруживается неисправность, когда используют только движение в электрическом режиме, то можно перейти на тепловой режим движения, чтобы устранить неисправность в электрической цепи трансмиссии.
Такую конфигурацию, позволяющую вращать винт только тепловым двигателем, то есть без участия электрического двигателя, можно также применять во время нормального взлета для сохранения заряда электрической батареи или когда она разряжена.
Такую конфигурацию сцеплений можно также применять во время горизонтального полета воздушного судна, если батарея считается достаточно заряженной и когда требуется сохранить ее заряд.
Кроме того, винтомоторная установка позволяет комбинировать движение вращения, производимое тепловым двигателем, и движение вращения, производимое электрическим двигателем, для приведения во вращение винта.
Так, например, если взлетно-посадочная полоса является короткой, чтобы использовать так называемый режим повышенной мощности, то есть при движении с одновременным использованием теплового двигателя 1 и электрического двигателя 2, сцепления могут быть приведены в следующую конфигурацию, показанную на фиг. 2С. Сцепление Е123 сомкнуто, сцепление Е14 разомкнуто, сцепление Е23 сомкнуто для передачи движения от теплового двигателя 1 на винт 3, и сцепление Е324 сомкнуто для передачи движения от электрического двигателя 2 на винт 3. Стрелки показывают, что тепловой двигатель передает свое движение вращения через сцепления Е123 и Е23, тогда как движение вращения ротора 202 электрического двигателя 2, питаемого током от батареи 40, передается на винт через сцепление Е324.
Винтомоторная установка позволяет также подзаряжать батарею 40 при помощи теплового двигателя 1 с одновременным продолжением вращения винта 3. Так, например, при подзарядке во время полета воздушного судна, как показано на фиг. 3 и 3А, сцепления могут быть приведены в следующую конфигурацию. Сцепление Е324 разомкнуто. Сцепление Е123, сцепление Е14 и сцепление Е23 сомкнуты. Таким образом, как показано стрелкой, тепловой двигатель 1 вращает промежуточный вал А2, что заставляет вращаться ротор 202, оснащенный магнитами 22, напротив обмотки 21 статора 201 и приводит к генерированию тока в обмотке 21, одновременно вращая вал А3 винта. Электрическая система 41, 42 управления контролирует ток, производимый при вращении ротора 202, чтобы подзаряжать батарею 40.
Такой вариант работы винтомоторной установки позволяет использовать избыток мощности теплового двигателя 1 для подзарядки батареи 40 в полете, в частности, если батарею ранее использовали для движения в электрическом режиме в фазе руления, взлета и/или набора высоты.
Винтомоторная установка позволяет рекуперировать энергию за счет приводного ветрового или водяного эффекта. В частности, во время снижения воздушного судна, сохраняя вращение винта 3 под действием воздушного потока, в котором он находится, как показано на фиг. 4 и 4А, сцепления можно привести в следующую конфигурацию. Сцепление Е123 и сцепление Е14 разомкнуты, чтобы отсоединить винт 3 от теплового двигателя 1 и отсоединить ротор 202 от теплового двигателя 1. Предпочтительно сцепление Е23 разомкнуто. Сцепление Е324 сомкнуто. Так, стрелка показывает, что движение винта 3 передается на ротор 202 электрического двигателя 2 через сателлит S223 и солнце S3 и что генерируемый таким образом ток используют для подзарядки батареи 40.
Винтомоторная установка позволяет подзаряжать батарею 40 при помощи теплового двигателя 1 без вращения винта 3. Так, например, для подзарядки на земле батареи воздушного судна, как показано на фиг. 5 и 5А, сцепления можно привести в следующую конфигурацию. Сцепление Е324 и сцепление Е23 разомкнуты. Сцепление Е123 и сцепление Е14 сомкнуты. Как показано стрелкой на фиг. 5А, тепловой двигатель 1 вращает промежуточный вал А2, заставляя вращаться ротор 202, оснащенный магнитами 22, напротив обмотки 21 статора 201, чтобы генерировать ток, контролируемый электрической системой 41, 42 управления, для подзарядки батареи 40.
Согласно варианту выполнения, воздушное судно содержит колеса, оснащенные электрическим приводом, соединенным с батареей 40 питания воздушного судна через электрическую систему 41, 42 управления. В этом случае винтомоторная установка позволяет питать электрический привод колес от электрической батареи 40.
Система управления электрическим приводом колес может быть системой, которая служит также для управления питанием электрического двигателя воздушного судна, или может быть отдельной системой, расположенной между батареей и электрическим приводом колес.
В ожидании своего использования тепловой двигатель 1 может быть выключен или может вращаться на малых оборотах. В частности, в случае, когда тепловой двигатель включен, каждое из сцеплений Е23 и Е324 выключено, чтобы не вращать винт.
Отсутствие вращения винта позволяет повысить безопасность оборудования и людей вокруг самолета в фазе руления и одновременно избегать ненужного расходования энергии батареи для приведения во вращение винта.
Версия выполнения, показанная на фиг. 6
В варианте выполнения, представленном на фиг. 6, винтомоторная установка содержит сцепление Е123, например, фрикционного типа, между упомянутым тепловым двигателем 1 и промежуточным валом А2.
В этом примере, показанном на фиг. 6, вал А3 винта жестко соединен с промежуточным валом А2.
Часть сцепления Е123 связана во вращении с выходным валом А1 теплового двигателя 1, а другая часть сцепления Е123 связана во вращении с частью промежуточного вала А2.
Промежуточный вал А2 состоит из двух частей, смещенных относительно друг друга в осевом направлении. Обе части промежуточного вала А2 соединены между собой при помощи устройства Т12 трансмиссии со шкивами и ремнем.
Электрическая силовая установка может содержать один или несколько электрических двигателей 2, смещенных в осевом направлении относительно вала А3 винта. Можно также предусмотреть «радиальное» смещение с системой угловой зубчатой передачи и на каждом выходном валу электрического двигателя кулачковую систему или сцепление.
Каждый электрический двигатель соединен с системой 4 электрического питания. В частности, предусмотрен один контроллер 42 на каждый электрический двигатель 2.
Выходной вал каждого электрического двигателя 2 жестко соединен во вращении с частью сцепления Е324’, предпочтительно типа кулачковой муфты. Другая часть сцепления Е324’ соединена во вращении с системой Т23 трансмиссии, например, со шкивами и ремнем, выполненной с возможностью передачи движения вращения от электрической силовой установки на вал А3 винта.
Каждое сцепление Е324’ позволяет отсоединить соответствующий электрический двигатель 2 от системы Т23 трансмиссии, в частности, в случае отказа упомянутого или каждого из упомянутых электрических двигателей.
Так, в этом варианте выполнения, представленном на фиг. 6, каждый электрический двигатель 2 оснащен независимой системой сцепления Е324’ фрикционного или кулачкового типа, которую можно функционально уподобить сцеплению Е324 из варианта выполнения, показанного на фиг. 1-5.
На фиг. 6 схематично показаны только два электрических двигателя, хотя присутствует и третий электрический двигатель, соединенный с системой Т23 трансмиссии аналогично другим электрическим двигателям через фрикционное или кулачковое сцепление, например, типа сцепления Е324’.
Предпочтительно электрическая силовая установка содержит три или более трех электрических двигателей.
В примере, представленном на фиг. 1-5, валы винтомоторной установки являются коаксиальными, и передача движения вала происходит при помощи тоже коаксиальных сцеплений. Согласно версии выполнения, показанной на фиг. 6, валы А1 и А3 смещены в осевом направлении.
Таким образом, понятно, что вал А3 винта может приводиться во вращение электрической силовой установкой при сомкнутом состоянии сцепления или каждого сцепления Е324’ или тепловым двигателем при сомкнутом состоянии сцепления Е123.
Другие признаки
Системой сцеплений можно управлять таким образом, чтобы переводить ее из одной конфигурации в другую при помощи ручного или автоматического устройства управления. В частности, можно предусмотреть блок управления, такой как вычислительное устройство, которое позволяет управлять системой привода сцеплений для перехода из одной конфигурации в другую. Блок управления может представлять собой процессор или память данных, в которой записаны компьютерные команды, исполняемые упомянутым процессором, или может представлять собой микроконтроллер.
Иначе говоря, описанные функции и этапы можно осуществлять при помощи компьютерной программы через аппаратные средства (например, сети программируемых портов). В частности, функции и этапы, осуществляемые блоком управления, можно реализовать при помощи наборов команд или компьютерных модулей, установленных в процессоре или контроллере, или можно реализовать при помощи соответствующих электронных компонентов или компонентов типа FPGA или ASIC. Можно также комбинировать компьютерные части и электронные части.
В случае, когда воздушное судно является самолетом, оснащенным колесами, можно также оснастить одно или несколько колес электрическим приводом, например, включенным в ступицу. Электрический привод каждого колеса может быть соединен с электрический системой управления воздушного судна. Так, в фазе руления электрический привод или электрические приводы колес могут получать питание от батареи 40 при помощи электрической системы 4 питания.
Воздушное судно может содержать несколько дополнительных пропеллерных систем, которыми можно управлять независимо друг от друга.
Согласно отличительному признаку, воздушное судно может содержать два вспомогательных винтовых двигателя (предпочтительно по бокам) и между двумя винтовыми двигателями - пропеллерную систему заявленной винтомоторной установки. Эти вспомогательные двигатели и винтомоторная установка могут быть как тягового, так и толкающего типа.
Винт или каждый винт может быть винтом с переменным шагом и может быть переведен в так называемую конфигурацию флюгирования для уменьшения лобового сопротивления в случае, когда его не используют.
Изобретение не ограничивается представленными на чертежах вариантами выполнения.
Кроме того, термин «содержащий» не исключает других элементов или этапов. Кроме того, признаки или этапы, которые были описаны со ссылками на один из представленных вариантов выполнения, можно также использовать в комбинации с другими признаками или этапами других представленных выше вариантов выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ, СОДЕРЖАЩИЙ ГИБРИДНУЮ СИЛОВУЮ УСТАНОВКУ, И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2020 |
|
RU2799278C2 |
| СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2023 |
|
RU2820238C1 |
| Способ синхронизации и обеспечения симметрии тяги воздушных винтов силовой установки летательного аппарата и электрическая синхронизирующая трансмиссия для его реализации | 2016 |
|
RU2646696C1 |
| Автожир | 2018 |
|
RU2673933C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| УСТАНОВКА С КОМБИНИРОВАННЫМ ПРИВОДОМ И ДИФФЕРЕНЦИАЛЬНЫМ СОЕДИНЕНИЕМ (ВАРИАНТЫ) | 1994 |
|
RU2126507C1 |
| АЭРОСАНИ-АМФИБИЯ | 2015 |
|
RU2585208C1 |
| СПОСОБ РАБОТЫ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2024 |
|
RU2833362C1 |
| АВТОМОБИЛЬ С ЛЕТНЫМИ ЭКСПЛУАТАЦИОННЫМИ СВОЙСТВАМИ | 2014 |
|
RU2551300C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |

Изобретение относится к области авиации, в частности к конструкциям приводов воздушных винтов. Машина, в частности воздушное судно (100) оснащена винтомоторной установкой, которая содержит тепловой двигатель (1) с выходным валом (А1), электрический двигатель (2), батарею (40), обеспечивающую питание электрического двигателя (2), и пропеллерную систему, содержащую винт (3) и вал (А3) винта. Винтомоторная установка содержит также систему сцеплений (Е123,Е14,Е23,Е324), позволяющих по выбору приводить во вращение винт при помощи теплового двигателя без передачи вращения от электрического двигателя на винт; приводить во вращение винт при помощи электрического двигателя без передачи вращения от теплового двигателя на винт; приводить во вращение винт посредством комбинированной передачи движения вращения от теплового двигателя на винт и движения вращения от электрического двигателя на винт. Электрический двигатель содержит статор и ротор, установленный с возможностью вращения вокруг вала. Обеспечивается повышение безопасности, снижение габаритов и веса. 2 н. и 13 з.п. ф-лы, 6 ил.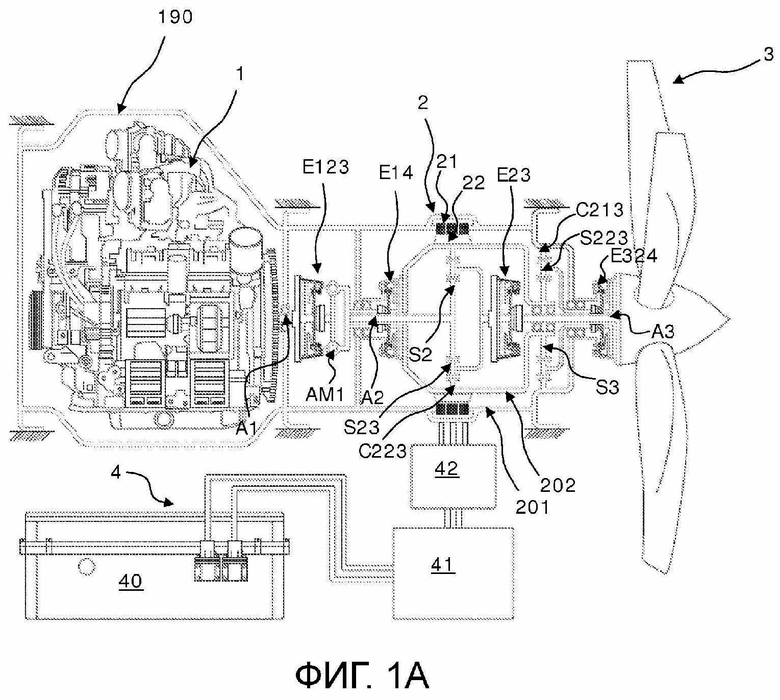
1. Машина (100), такая как воздушное судно, оснащенное винтомоторной установкой, которая содержит:
- тепловую силовую установку, которая содержит тепловой двигатель (1) и вал (А1), называемый выходным валом теплового двигателя и выполненный с возможностью своего приведения во вращение тепловым двигателем;
- электрическую силовую установку, содержащую электрический двигатель (2);
- систему (4) электрического питания, содержащую батарею (40), обеспечивающую питание электрического двигателя (2);
- пропеллерную систему, содержащую винт (3) и вал (А3), называемый валом винта, с которым соединен винт (3);
при этом винтомоторная установка содержит также систему сцеплений (Е123, Е14, Е23, Е324), выполненную с возможностью обеспечения по выбору:
- приведения в движения винта (3) при помощи теплового двигателя (1) без передачи вращения от электрического двигателя (2) на винт (3);
- приведения в движения винта (3) при помощи электрического двигателя (2) без передачи вращения от теплового двигателя (1) на винт (3);
- приведения в движения винта (3) посредством комбинированной передачи движения вращения от теплового двигателя (1) на винт (3) и движения вращения от электрического двигателя (2) на винт (3);
при этом винтомоторная установка содержит вал (А2), называемый промежуточным валом, жестко соединенный с валом (А3) винта или выполненный с возможностью соединения во вращении с валом (А3) винта,
и систему сцеплений, содержащую:
- первое сцепление (Е123), выполненное с возможностью передачи в сомкнутом состоянии вращения от теплового двигателя (1) на промежуточный вал (А2), и
- второе сцепление (Е23), выполненное с возможностью передачи в сомкнутом состоянии вращения от промежуточного вала (А2) на вал (А3) винта, и/или третье сцепление (Е324), выполненное с возможностью передачи в сомкнутом состоянии вращения от электрического двигателя (2) на вал (А3) винта;
при этом электрический двигатель (2) содержит статор (201) и ротор (202), при этом ротор установлен с возможностью вращения вокруг промежуточного вала (А2) и внутри статора (201), при этом ротор (202) и промежуточный вал (А2) являются коаксиальными.
2. Машина (100) по п. 1, в которой каждый вал (А1,А2), который является частью системы передачи движения на винт (3), является коаксиальным с валом (А3) винта.
3. Машина (100) по п. 1 или 2, в которой статор (201) выполнен в виде полого тела и оснащен обмоткой (21), и ротор (202) оснащен магнитами (22).
4. Машина (100) по любому из пп. 1-3, в которой винтомоторная установка содержит также механическую систему (S2,S23,C223) трансмиссии типа эпициклической передачи, которая содержит:
- внутренний вал (S2), называемый солнцем, соответствующий части промежуточного вала (2), и коронную шестерню (C223), выполненную внутри полого тела ротора;
- сателлит (S23), установленный между солнцем (S2) и коронной шестерней (C223), и водило, конец которого, противоположный к сателлиту (S23), соединен во вращении с частью второго сцепления (Е23), при этом второе сцепление (Е23) содержит другую часть, соединенную во вращении с валом (А3) винта.
5. Машина (100) по любому из пп. 1-4, в которой система сцеплений содержит четвертое сцепление (Е14), выполненное таким образом, чтобы в сомкнутом состоянии передавать вращение от теплового двигателя (1) на электрический двигатель (2) для обеспечения его работы в качестве генератора.
6. Машина (100) по п. 5, в которой четвертое сцепление (Е14) содержит часть, которая в сомкнутом состоянии первого сцепления (Е123) жестко соединена во вращении с выходным валом (А1) теплового двигателя (1), и другую часть, которая жестко соединена во вращении с ротором (202) электрического двигателя (2).
7. Машина (100) по любому из пп. 1-6, в которой третье сцепление (Е324) содержит часть, жестко соединенную во вращении с ротором (202) электрического двигателя (2) через механическую систему (S3, S223, C213) трансмиссии, и часть, жестко соединенную во вращении с винтом (3).
8. Машина (100) по любому из пп. 1-6, в которой система (4) электрического питания содержит также электрическую систему (41,42) управления, которая содержит:
- блок (41) высокого напряжения, который позволяет размыкать или замыкать цепь питания между батареей (40) и электрическим двигателем (2);
- контроллер (42), который позволяет обрабатывать ток, выдаваемый батареей (40) или производимый электрическим двигателем (2), когда он работает в качестве генератора.
9. Способ пилотирования машины (100) по любому из пп. 1-8, в котором при электрическом режиме движения машины, в частности во время фазы взлета и/или набора высоты, сцепления приводятся в следующую конфигурацию:
- первое сцепление (Е123) разомкнуто для отсоединения теплового двигателя (1) от винта (3);
- четвертое сцепление (Е14), если оно присутствует, и второе сцепление (Е23) предпочтительно разомкнуты;
- третье сцепление (Е324), если оно присутствует, сомкнуто для передачи движения от электрического двигателя (2) на винт (3).
10. Способ пилотирования машины (100) по п. 9, в которой при тепловом режиме движения без использования электрической силовой установки, например, когда на электрической цепи трансмиссии появляется неисправность, сцепления приводятся в следующую конфигурацию:
- первое сцепление (Е123) сомкнуто;
- второе сцепление (Е23) сомкнуто для передачи движения от теплового двигателя (1) на винт (3).
11. Способ пилотирования машины (100) по п. 9, в котором для движения за счет совместного использования теплового двигателя (1) и электрического двигателя (2) сцепления приводятся в следующую конфигурацию:
- первое сцепление (Е123) сомкнуто;
- второе сцепление (Е23) сомкнуто для передачи движения от теплового двигателя (1) на винт (3),
- третье сцепление (Е324), если оно присутствует, сомкнуто для передачи движения от электрического двигателя (2) на винт (3),
- четвертое сцепление (Е14), если оно присутствует, разомкнуто.
12. Способ пилотирования машины (100) по п. 9, в котором система сцеплений содержит четвертое сцепление (Е14), выполненное с возможностью передачи в сомкнутом состоянии вращения от теплового двигателя (1) на электрический двигатель (2) для обеспечения его работы в качестве генератора,
в котором для подзарядки батареи (40) при помощи теплового двигателя (1) при одновременном сохранении вращения винта (3), например для подзарядки во время полета машины, сцепления приводятся в следующую конфигурацию:
первое сцепление (Е123), четвертое сцепление (Е14) и второе сцепление (Е23) сомкнуты, так что тепловой двигатель (1) приводит в движение промежуточный вал (А2) для поворота ротора (202) относительно статора (201), чтобы генерировать ток, при этом приводя в движение вал (А3) винта;
при этом электрическая система (41,42) управления контролирует ток, производимый электрическим двигателем (2), работающим как генератор, для подзарядки батареи (40).
13. Способ пилотирования машины (100) по п. 9, в котором система сцеплений содержит четвертое сцепление (Е14), выполненное с возможностью передачи в сомкнутом состоянии вращения от теплового двигателя (1) на электрический двигатель (2) для обеспечения его работы в качестве генератора,
в котором для рекуперации энергии за счет приводного ветрового или водяного эффекта сцепления приводятся в следующую конфигурацию:
- по меньшей мере одно среди первого сцепления (Е123) и четвертого сцепления (Е14) разомкнуто для отсоединения винта (3) от теплового двигателя (1) или для отсоединения ротора (202) от теплового двигателя (1);
- предпочтительно второе сцепление (Е23) разомкнуто;
- третье сцепление (Е324) сомкнуто для передачи движения от винта (3) на ротор (202) электрического двигателя (2).
14. Способ пилотирования машины (100) по п. 9, в котором система сцеплений содержит четвертое сцепление (Е14), выполненное с возможностью передачи в сомкнутом состоянии вращения от теплового двигателя (1) на электрический двигатель (2) для обеспечения его работы в качестве генератора,
в котором для подзарядки батареи (40) при помощи теплового двигателя (1) без приведения в действие винта (3) сцепления приводятся в следующую конфигурацию:
- размыкание третьего сцепления (Е324) и второго сцепления (Е23),
- смыкание первого сцепления (Е123) и четвертого сцепления (Е14),
таким образом, чтобы тепловой двигатель (1) приводил в действие промежуточный вал (А2) для поворота ротора (202) с целью генерирования тока,
при этом электрическая система (41,42) управления контролирует ток, производимый электрическим двигателем (2), работающим в качестве генератора, для подзарядки батареи (40).
15. Способ пилотирования машины (100) по п. 9, в котором машина содержит колеса, оснащенные электрическим приводом, соединенным с батареей (40) питания машины посредством электрической системы (41,42) управления, при этом способ включает в себя питание электрического привода колес от электрической батареи (40).
| DE 102012021340 A1, 30.04.2014 | |||
| СПОСОБ И КОНФИГУРАЦИЯ ПОДВОДА ДВИЖУЩЕЙ И/ИЛИ НЕДВИЖУЩЕЙ ЭНЕРГИИ В КОНСТРУКЦИИ ВЕРТОЛЕТА ПОСРЕДСТВОМ ВСПОМОГАТЕЛЬНОГО СИЛОВОГО ДВИГАТЕЛЯ | 2013 |
|
RU2639838C2 |
| EP 2964524 B1, 27.06.2018 | |||
| Способ определения производных катехоламинов в моче | 2018 |
|
RU2688184C1 |
| US 20100219779 A1, 02.09.2010. | |||

