[0001] ОБЛАСТЬ ТЕХНИКИ ПО ИЗОБРЕТЕНИЮ
[0002] Настоящее изобретение в целом относится к аппарату, такому, как летательный аппарат, снабженному силовой установкой, содержащей установку с тепловыми двигателями и установку с электродвигателями.
[0003] ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0004] В предшествующем уровне техники известны такие аппараты, как летательный аппарат, содержащие силовую установку со следующей конфигурацией. Силовая установка содержит тяговую систему с лопастями, установку с электродвигателями, батарею для питания установки с электродвигателями и тепловой двигатель, связанный с генератором переменного тока, обеспечивающий возможность подзарядки батареи.
[0005] Однако, в случае неисправности установки с тепловым двигателем, оставшаяся электрическая мощность может оказаться недостаточной для обеспечения безопасного управления летательным аппаратом.
[0006] В документе US 2016083104 A1 описывается летательный аппарат, содержащий установку с тепловыми двигателями и установку с электродвигателями, расположенную параллельно установке с тепловыми двигателями, для обеспечения дополнительной мощности и для приведения в действие несущего винта летательного аппарата, в дополнение к мощности, вырабатываемой установкой с тепловыми двигателями.
[0007] Настоящее изобретение заключается в предложении нового аппарата, позволяющего преодолеть все проблемы, изложенные выше, или часть этих проблем.
[0008] СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] В связи с этим, предмет изобретения составляет аппарат, такой, как летательный аппарат, снабженный силовой установкой, отличающийся тем, что силовая установка содержит:
- тяговую систему с лопастями,
- установку с тепловыми двигателями, содержащую первый тепловой двигатель и второй тепловой двигатель, сконфигурированную с возможностью приведения в действие тяговой системы с лопастями,
- установку с электродвигателями, сконфигурированную с возможностью приведения в действие тяговой системы с лопастями,
- систему электропитания, содержащую батарею для питания установки с электродвигателями,
- систему сцепления, сконфигурированную с возможностью введения в зацепление любого из тепловых двигателей или каждого из тепловых двигателей для приведения в действие тяговой системы с лопастями, причем система сцепления также сконфигурирована с возможностью выведения из зацепления любого из тепловых двигателей или каждого из тепловых двигателей относительно тяговой системы с лопастями.
[0010] Такая конфигурация гибридной силовой установки, которая содержит два тепловых двигателя, которые могут быть выведены из зацепления один относительно другого, позволяет обеспечить безопасное управление летательным аппаратом, когда один из тепловых двигателей неисправен. Такая конфигурация, в частности, полезна, когда аппарат представляет собой вертолет.
[0011] Таким образом, тяговая система аппарата с винтом может приводиться в действие независимо от электродвигателя и/или теплового двигателя или одновременно с ними, из которых может использоваться часть двигателей, или все двигатели.
[0012] Таким образом, повышается безопасность, особенно во время взлета, когда аппарат представляет собой летательный аппарат, поскольку в случае проблемы с электрической цепью передачи движения тепловой двигатель может обеспечить управление винтом с помощью одного теплового двигателя или комбинации двух тепловых двигателей.
[0013] Кроме того, возможность использования только режима электрической тяги позволяет летательному аппарату взлетать и приземляться на городской или пригородной местности с пониженным образованием шума.
[0014] Возможность выведения из зацепления одного из тепловых двигателей при введении в зацепление другого также позволяет устранить неисправность двигателя или, например, в крейсерской конфигурации, снизить потребление энергии.
[0015] В соответствии с вариантами реализации, в аппарате имеется возможность получения всех или нескольких из следующих преимуществ:
- низкий уровень шума при посадке и взлете,
- высокая эксплуатационная безопасность благодаря наличию резервирования двигателей и возможности адаптации конфигурации силовой установки,
- возможная оптимизация энергопотребления,
- сокращение выбросов CO2 на этапах взлета и посадки,
- возможность уменьшения объемов технического обслуживания такой силовой установки по сравнению с использованием турбины.
[0016] Аппарат может также содержать один или несколько нижеследующих признаков, рассматриваемых в любой технически допустимой комбинации.
[0017] В соответствии с преимущественным признаком изобретения, установка с электродвигателями располагается последовательно с установкой с тепловыми двигателями, между установкой с тепловыми двигателями и тяговой системой с лопастями.
[0018] В соответствии с преимущественным признаком изобретения, упомянутый аппарат содержит блок управления системой сцепления установки с тепловыми двигателями и системой питания установки с электродвигателями, причем блок управления сконфигурирован с возможностью введения в зацепление обоих тепловых двигателей для передачи вращательного движения установки с тепловыми двигателями на тяговую систему с лопастями посредством установки с электродвигателями, без расходования и подзарядки электрической батареи.
[0019] В соответствии с преимущественным признаком изобретения, упомянутый аппарат содержит блок управления системой сцепления установки с тепловыми двигателями и системой питания установки с электродвигателями, причем блок управления сконфигурирован с возможностью выведения из зацепления одного из двух тепловых двигателей, например, в случае неисправности упомянутого теплового двигателя, когда другой тепловой двигатель остается введенным в зацепление, и для управления системой электропитания для подачи питания на установку с электродвигателями для приведения в действие тяговой системы с лопастями с помощью одного из двух тепловых двигателей и установки с электродвигателями.
[0020] В соответствии с преимущественным признаком изобретения, тяговая система с лопастями содержит два несущих винта с лопастями, каждый из которых содержит вертикальный вращающийся вал, снабженный лопастями, причем упомянутые несущие винты сконфигурированы для вращения, в состоянии вращения, в противоположном направлении друг относительно друга.
[0021] В соответствии с преимущественным признаком изобретения, в аппарате, содержащем выходной вал установки с тепловыми двигателями, система сцепления установки с тепловыми двигателями располагается между выходными валами тепловых двигателей и системой передачи движения, сконфигурированной для передачи вращательного движения одного из тепловых двигателей, или каждого из упомянутых тепловых двигателей, на упомянутый выходной вал установки с тепловыми двигателями.
[0022] В соответствии с преимущественным признаком изобретения, силовая установка содержит систему понижения скорости, предпочтительно содержащую зубчатую передачу, расположенную между выходным валом установки с тепловыми двигателями и входом установки с электродвигателями.
[0023] В соответствии с преимущественным признаком изобретения, в аппарате, содержащем выходной вал установки с электродвигателями, силовая установка содержит систему передачи движения, расположенную на выходе установки с электродвигателями и сконфигурированную для передачи вращательного движения установки с электродвигателями на упомянутый выходной вал установки с электродвигателями.
[0024] В соответствии с преимущественным признаком изобретения, в аппарате, содержащем выходной вал установки с электродвигателями и входной вал тяговой системы с лопастями, силовая установка содержит систему понижения скорости, предпочтительно эпициклическую передачу, между упомянутым выходным валом установки с электродвигателями и упомянутым входным валом тяговой системы с лопастями.
[0025] В соответствии с преимущественным признаком изобретения, входной вал тяговой системы с лопастями снабжен коническим редуктором.
[0026] В соответствии с преимущественным признаком изобретения, в установке с электродвигателем имеется множество электродвигателей, предпочтительно, три электродвигателя, предпочтительно равномерно распределенных вокруг центральной оси.
[0027] В соответствии с преимущественным признаком изобретения, каждый из электродвигателей содержит систему расцепления, например, посредством расцепления кулачковой муфты, что позволяет, например, в случае отказа электродвигателя, механически изолировать упомянутый электродвигатель от одного или нескольких других электродвигателей.
[0028] В соответствии с преимущественным признаком изобретения, мощность каждого из тепловых двигателей составляет порядка 150 кВт, и мощность установки с электродвигателями составляет порядка 180 кВт, предпочтительно, 60 кВт для электродвигателя установки с электродвигателями.
[0029] В соответствии с преимущественным признаком изобретения, устройство содержит блок управления системой сцепления установки с тепловыми двигателями и системой питания установки с электродвигателями, причем блок управления сконфигурирован с возможностью введения в зацепление двух тепловых двигателей и подачи питания на установку с электродвигателями для приведения в действие тяговой системы с лопастями с помощью комбинации двух тепловых двигателей и установки с электродвигателями.
[0030] В соответствии с преимущественным признаком изобретения, аппарат содержит блок управления системой сцепления установки с тепловыми двигателями и системой питания установки с электродвигателями, причем блок управления сконфигурирован с возможностью введения в зацепление двух тепловых двигателей для приведения в действие установки с электродвигателем, так, чтобы и передавать посредством установки с электродвигателями вращательное движение теплового двигателя на тяговую систему с лопастями, и подзаряжать батарею системы электропитания.
[0031] В соответствии с преимущественным признаком изобретения, устройство содержит блок управления системой сцепления установки с тепловыми двигателями и системой питания установки с электродвигателями, причем блок управления сконфигурирован с возможностью выведения из зацепления двух тепловых двигателей и управления системой электропитания для подачи питания на установку с электродвигателями для приведения в действие тяговой системы с лопастями с помощью только установки с электродвигателями.
[0032] В соответствии с конкретным объектом, различные возможные режимы работы блока управления, представленные выше, могут быть выбраны как одни относительно других.
[0033] В соответствии с преимущественным признаком изобретения, аппарат содержит корпус, в котором размещается установка с электродвигателем, и в котором выполнены отверстия и/или полости для охлаждения установки с электродвигателями, причем упомянутая силовая установка предпочтительно содержит систему водяного охлаждения для охлаждения тепловых двигателей.
[0034] Изобретение также относится к способу управления аппаратом, такому, как описывается выше, который содержит выведение из зацепления или введение в зацепление одного из тепловых двигателей или каждого из тепловых двигателей относительно тяговой системы с лопастями и/или управление системой питания установки с электродвигателями для подачи питания на установку с электродвигателями или для подзарядки батареи.
[0035] КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0036] Другие признаки и преимущества изобретения станут очевидными из нижеследующего описания, которое является исключительно иллюстративным, а не ограничивающим, и его следует читать вместе с прилагаемыми чертежами, на которых:
[0037] Фиг.1 изображает схематический вид летательного аппарата, в данном случае вертолета, в соответствии с одним из вариантов реализации изобретения;
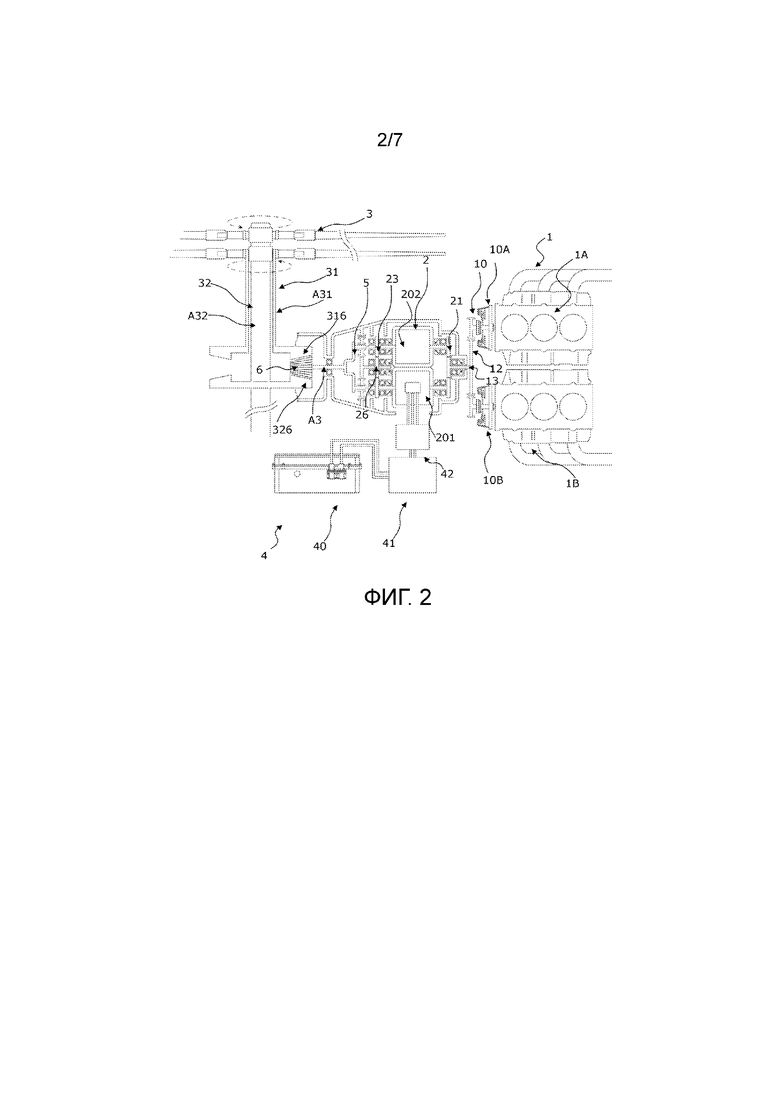
[0038] Фиг.2 - схематический вид силовой установки летательного аппарата, такого, как показанный на Фиг.1, в соответствии с одним из вариантов реализации изобретения;
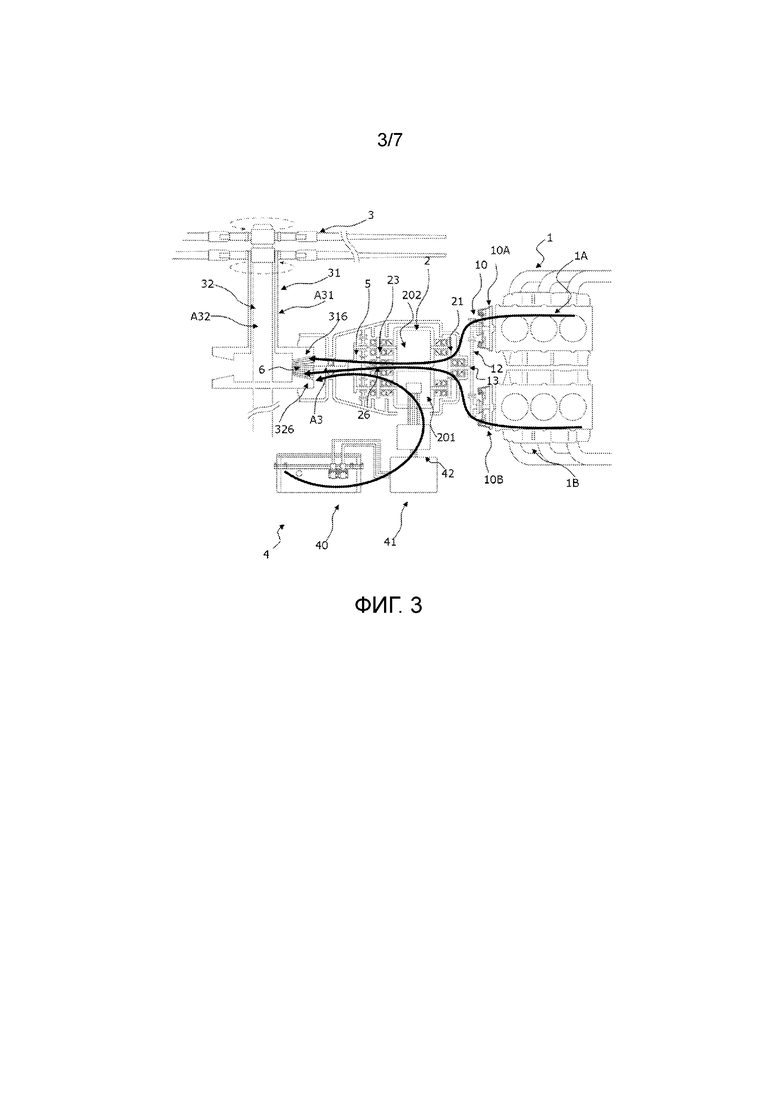
[0039] Фиг.3 - схематический вид силовой установки в соответствии с одним из вариантов реализации изобретения, например, в режиме взлета и/или набора высоты, в которой комбинируется тепловая тяга и электрическая тяга;
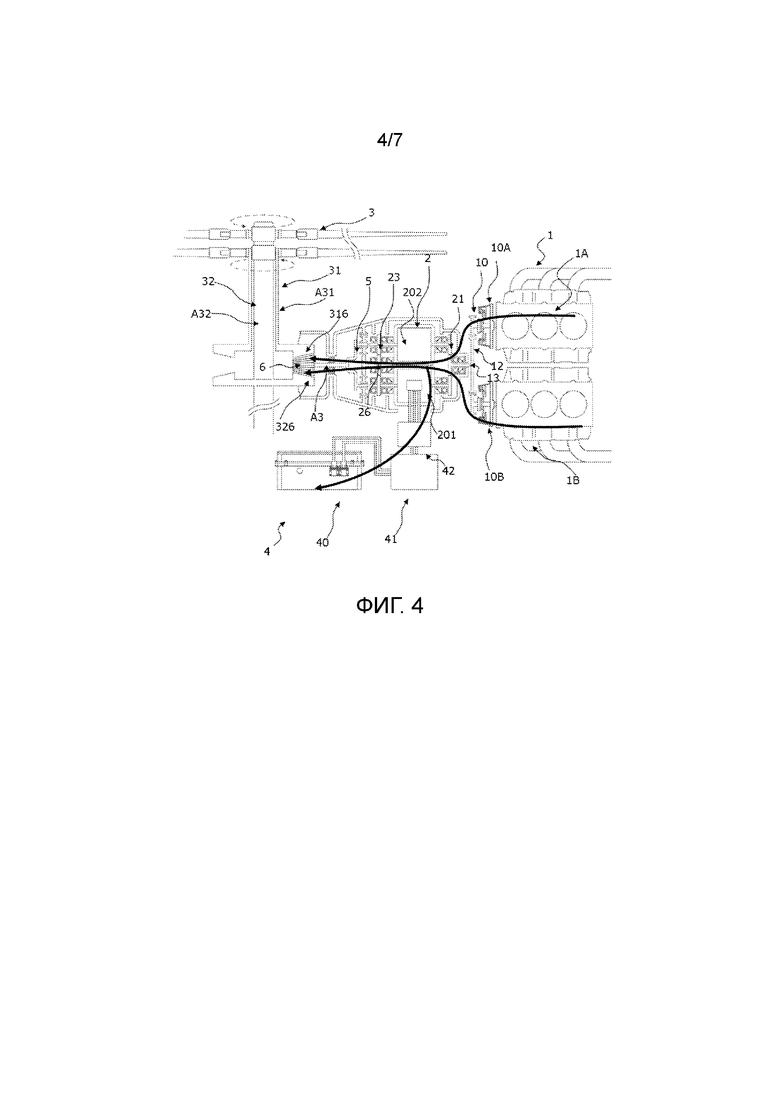
[0040] Фиг.4 - схематический вид силовой установки летательного аппарата в соответствии с одним из вариантов реализации изобретения в режиме тепловой тяги и подзарядки электрической батареи;
[0041] Фиг.5 - схематический вид силовой установки летательного аппарата в соответствии с одним из вариантов реализации изобретения в режиме только электрической тяги;
[0042] Фиг.6 - схематический вид силовой установки летательного аппарата в соответствии с одним из вариантов реализации изобретения в режиме только тепловой тяги;
[0043] Фиг.7 - схематический вид летательного аппарата, в соответствии с одним из вариантов реализации изобретения, во время его полета, например, при горизонтальном полете, и/или, например, в случае неисправности одного из тепловых двигателей.
[0044] ПОДРОБНОЕ ОПИСАНИЕ
[0045] Концепция изобретения более подробно описывается ниже со ссылкой на прилагаемые чертежи, на которых показаны варианты реализации концепции изобретения. На чертежах размер и относительные размеры элементов могут быть преувеличены для ясности. Одинаковые цифровые обозначения относятся к одинаковым позициям на всех чертежах. Однако, эта концепция изобретения может быть осуществлена во многих различных формах, и ее не следует интерпретировать как ограниченную вариантами реализации, изложенными в данном документе. Вместо этого эти варианты реализации предоставляются для полноты данного описания и для пояснения специалистам в данной области техники общей концепции изобретения. Нижеследующие варианты реализации обсуждаются с целью упрощения в связи с терминологией и структурой летательного аппарата. Как поясняется ниже, аппарат также может быть морским аппаратом.
[0046] Ссылка во всем описании на "вариант реализации" означает, что функциональная особенность, конструкция или конкретный признак, описываемые в связи с вариантом реализации, включены, по меньшей мере, в один вариант реализации настоящего изобретения. Таким образом, выражение "в одном варианте реализации" в различных местах описания не обязательно относится к одному и тому же варианту реализации. Кроме того, функциональные особенности, конструкции или конкретные признаки могут быть объединены любым подходящим способом в одном или нескольких вариантах реализации.
[0047] На Фиг.1 показан аппарат, который представляет собой вертолет 100, снабженный силовой установкой.
[0048] Альтернативно, аппарат может быть летательным аппаратом другого типа, например, самолетом или дроном. Аппарат также может быть морским аппаратом.
[0049] Силовая установка вертолета содержит тяговую систему 3 с лопастями, которая включает в себя два несущих винта 31, 32, вращающихся в противоположных направлениях. В качестве альтернативы, может быть предусмотрен один несущий винт.
[0050] Вертолет также может содержать рулевой винт или другое рулевое устройство, которое может быть приведено в действие посредством упомянутой силовой установки или независимой силовой установки. Рулевое устройство не требуется, когда аппарат содержит два несущих винта, вращающихся в противоположных направлениях.
[0051] Нижеследующее описание сделано для вертолета, но применимо к другим типам аппаратов, оборудованных тяговой системой с лопастями. Ясно, в частности, что, в соответствии с типом аппарата, тяговая система с лопастями аппарата может содержать один или более винтов для самолета или судна.
[0052] Кроме того, описание также применимо к аппаратам, описываемым во французской патентной заявке, поданной под номером FR 18 01092, еще не опубликованной на момент подачи настоящей заявки, для случая замены теплового двигателя, описываемого в данной заявке FR 18 01092, комплектом двух тепловых двигателей, которые можно выводить из зацепления один относительно другого, как описывается ниже.
[0053] Как показано на Фиг.2, силовая установка содержит тепловой двигатель 1, сконфигурированный с возможностью приведения в действие тяговой системы 3 с лопастями, как описывается ниже.
[0054] Установка с тепловыми двигателями
[0055] Установка 1 с тепловыми двигателями включает в себя первый тепловой двигатель 1A и второй тепловой двигатель 1B. И первый, и второй тепловой двигатель содержит выходной вал.
[0056] Мощность каждого теплового двигателя 1A, 1B составляет, например, 150 кВт.
[0057] Упомянутая силовая установка предпочтительно содержит систему водяного охлаждения для охлаждения тепловых двигателей 1A, 1B.
[0058] Система сцепления
[0059] Силовая установка содержит систему 10 сцепления, позволяющую вводить в зацепление любой из тепловых двигателей 1A, 1B или каждый из тепловых двигателей 1A, 1B для приведения в действие тяговой системы 3 с лопастями.
[0060] Система 10 сцепления содержит сцепление 10А и сцепление 10B, выборочно управляемые для введения в зацепление первого теплового двигателя 1А, и/или введения в зацепление второго теплового двигателя 1B относительно цепи передачи движения между установкой 1 с тепловыми двигателями и тяговой системой 3 с лопастями.
[0061] Система 10 сцепления также сконфигурирована с возможностью выведения из зацепления любого из тепловых двигателей 1A, 1B или каждого из тепловых двигателей 1A, 1B относительно тяговой системы 3 с лопастями.
[0062] Под термином "выведенный из зацепления относительно тяговой системы 3 с лопастями" понимается тот факт, что установка 1 с тепловыми двигателями отсоединяется от цепного привода передачи усилия или движения, который находится между установкой 1 с тепловыми двигателями и тяговой системой 3 с лопастями.
[0063] Система 10 сцепления установки 1 с тепловыми двигателями располагается между выходными валами тепловых двигателей 1А, 1В и системой 12 передачи движения.
[0064] Система 12 передачи движения, сконфигурированная для передачи вращательного движения одного или каждого из упомянутых тепловых двигателей, имеет вал 13, называемый выходным валом установки 1 с тепловыми двигателями.
[0065] Система 12 содержит, например, набор шестерен, или набор из колеса и ремня или цепи.
[0066] Выходной вал 13 присоединен или может присоединяться к тяговой системе 3 с лопастями через механизм передачи движения, представленный ниже.
[0067] Механизм передачи движения
[0068] Механизм передачи движения содержит систему понижения скорости, которая содержит зубчатую передачу 21, расположенную между выходным валом 13 установки 1 с тепловыми двигателями и входом установки 2 с электродвигателями.
[0069] Зубчатая передача содержит входной вал 13 и промежуточные шестерни, поддерживаемые входными валами установки 2 с электродвигателями.
[0070] Механизм передачи движения также содержит систему 23 передачи движения, расположенную на выходе установки 2 с электродвигателями и сконфигурированную для передачи вращательного движения от установки 2 с электродвигателями (которая содержит множество электродвигателей в показанном на чертежах примере) на вал, называемый выходным валом 26 установки с электродвигателями.
[0071] Выходной вал 26 предпочтительно коаксиален выходному валу 13.
[0072] Система 23 передачи движения создает понижение (например, с передаточным числом, равным приблизительно 1,4), что вместе с выходным валом 26 позволяет действовать на систему 5 понижения скорости.
[0073] Система 5 понижения скорости содержит эпициклическую передачу 5, передаточное число которой, например, равно приблизительно 3.
[0074] Эпициклическая передача 5 располагается между выходным валом 26 установки 2 с электродвигателями и входным валом А3 тяговой системы 3 с лопастями.
[0075] Установка с электродвигателями
[0076] Силовая установка также содержит установку 2 с электродвигателями, сконфигурированную с возможностью приведения в действие тяговой системы 3 с лопастями.
[0077] Система 4 электропитания содержит батарею 40, позволяющую подавать питание на установку 2 с электродвигателями. Конечно, батарея 40 может содержать комплект батарей.
[0078] Система 4 электропитания также содержит систему 41, 42 электрического управления, которая содержит высоковольтный блок 41 и контроллер 42.
[0079] Высоковольтный блок 41 позволяет размыкать или замыкать цепь электропитания между батареей 40 и установкой 2 с электродвигателями. Контроллер 42 позволяет обрабатывать ток, подаваемый батареей 40 или вырабатываемый посредством установки 2 с электродвигателями, когда она работает как генератор.
[0080] В примере, показанном на чертежах, установка 2 с электродвигателями имеет множество электродвигателей 201, 202, предпочтительно распределенных равномерно вокруг центральной оси. Установка с электродвигателями предпочтительно содержит три двигателя, распределенных под углом 120º вокруг воображаемой оси, коаксиальной выходной оси 26. Таким образом, в показанном на чертежах примере, представлены только два двигателя, но присутствует и третий.
[0081] Мощность установки 2 с электродвигателями составляет 180 кВт, с предпочтительным значением 60 кВт для электродвигателя 2.
[0082] Каждый из электродвигателей 201, 202 имеет входной вал, связанный с редукционной системой 21, и выходной вал, связанный с выходной системой 23 передачи движения.
[0083] Каждый из электродвигателей 201, 202 содержит систему расцепления, позволяющую, например, в случае отказа упомянутого электродвигателя, изолировать механически упомянутый электродвигатель относительно другого электродвигателя (электродвигателей). Система расцепления может быть системой расцепления посредством расцепления кулачковой муфты.
[0084] В общем, когда речь идет о системе сцепления, это может быть система фрикционного типа или кулачкового типа.
[0085] Силовая установка содержит корпус, в котором размещается установка 2 с электродвигателями. В корпусе могут быть выполнены отверстия и/или полости для охлаждения установки 2 с электродвигателями.
[0086] Тяговая система
[0087] В соответствии с вариантом реализации, показанным на чертежах, тяговая система 3 с лопастями содержат два несущих винта 31, 32 с лопастями, каждый из которых содержит вертикальный вращающийся вал A31, A32, снабженный лопастями. Упомянутые несущие винты 31, 32 сконфигурированы для вращения, в состоянии вращения, в направлении, противоположном друг другу.
[0088] Входной вал А3 тяговой системы 3 с лопастями снабжен коническим редуктором 6. Конический редуктор 6 содержит коническую шестерню с передаточным числом, например, порядка 3,7.
[0089] В примере, показанном на чертежах, каждый из валов A31, A32 несущих винтов 31, 32 снабжен конической опорной поверхностью 316, 326, сконфигурированной для взаимодействия с конической шестерней 6, установленной на входном валу А3 тяговой системы 3 с лопастями.
[0090] В соответствии с конкретным объектом, силовая установка содержит блок управления, позволяющий управлять системой 10 сцепления установки 1 с тепловыми двигателями и системой 4 питания установки 2 с электродвигателями.
[0091] Примеры способов управления
[0092] В примере, показанном на чертежах, сцепления представлены для упрощения в открытом положении. Однако нижеследующее описание определяет фактическую конфигурацию, разомкнутую (выведенную из зацепления) или замкнутую (введенную в зацепление) каждого из упомянутых сцеплений в соответствии с осуществленным способом управления. Кроме того, добавлены стрелки (отличающиеся от стрелок со ссылками) для обозначения активной цепи передачи движения и, где необходимо, электрического тока, подаваемого или принимаемого системой электропитания.
[0093] Представленная ниже силовая установка позволяет осуществлять различные способы управления летательным аппаратом за счет адаптации конфигурации сцеплений.
[0094] Блок управления сконфигурирован с возможностью выбора различных рабочих конфигураций силовой установки в соответствии с выполняемыми операциями.
[0095] В соответствии с первой рабочей конфигурацией, показанной на Фиг.3, блок управления управляет сцеплением двух тепловых двигателей 1A, 1B и подает питание на установку 2 с электродвигателями для приведения в действие тяговой системы 3 с лопастями с помощью комбинации двух тепловых двигателей 1A, 1B и установки 2 с электродвигателями. Данный режим работы, показанный на Фиг.3, в частности, полезен, когда требуется большая мощность, особенно во время взлета.
[0096] Таким образом, силовая установка позволяет комбинировать вращательное движение, обеспечиваемое двумя тепловыми двигателями, и вращательное движение, обеспечиваемое электродвигателем, для приведения в действие тяговой системы с лопастями.
[0097] В соответствии со второй рабочей конфигурацией, показанной на Фиг.4, блок управления управляет сцеплением двух тепловых двигателей 1A, 1B для приведения в действие установки 2 с электродвигателями, так, чтобы, и передавать посредством установки 2 с электродвигателями вращательное движение установки 1 с тепловыми двигателями на тяговую систему 3 с лопастями, и управлять системой 4 питания для подзарядки батареи 40.
[0098] Данный режим работы, показанный на Фиг.4, может быть использован, когда потребность в мощности для тяговой системы 3 ниже, чем мощность, которую может обеспечить установка 1 с тепловыми двигателями, и когда необходима подзарядка электрической батареи 40.
[0099] Такой режим работы силовой установки позволяет использовать избыточную мощность теплового двигателя 1 для подзарядки батареи 40 в полете, в частности, когда батарея была использована для электрической тяги на этапе взлета.
[0100] В соответствии с конкретным объектом, двигательная установка 2, в частности, электродвигатели, которые ее составляют, в примере, показанном на чертежах, имеет, или имеют, двойной выход на уровне их ротора, что позволяет им быть двигателями и/или генераторами, в зависимости от условий работы.
[0101] Таким образом, в крейсерском режиме мощность, подаваемая тепловыми двигателями 1A, 1B, представляет собой главный источник тяги. Электродвигатели трансформируются в генераторы и заряжают комплект батарей 40 через преобразователь 42 и силовую электронику 41.
[0102] Преимущественно, подаваемая мощность составляет приблизительно 260 кВт для приведения в действие посредством установки с тепловыми двигателями и 30 кВт для подзарядки батареи.
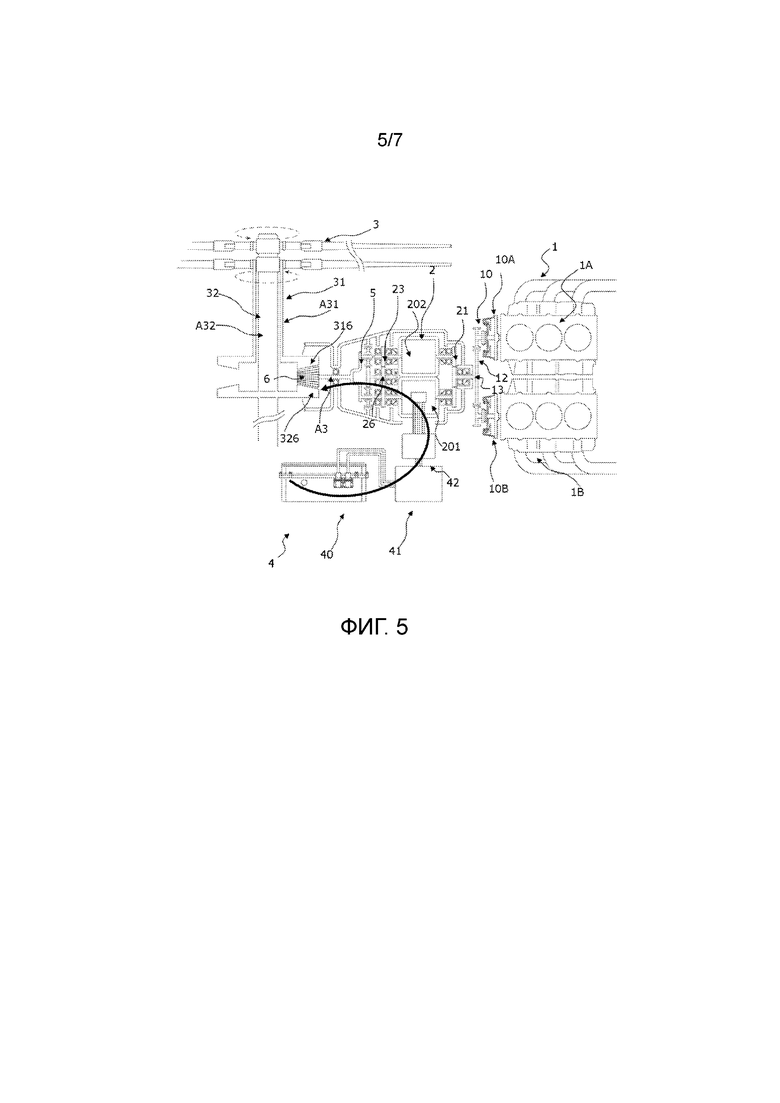
[0103] В соответствии с третьей рабочей конфигурацией, показанной на Фиг.5, блок управления управляет выведением из зацепления двух тепловых двигателей 1A, 1B и управляет системой 4 питания для подачи питания на установку 2 с электродвигателями. Таким образом, тяговая система 3 с лопастями приводится в действие с помощью только установки 2 с электродвигателями. Данный режим работы, показанный на Фиг.5, в частности, полезен для бесшумной посадки.
[0104] Таким образом, в режиме посадки, можно активировать только электрический режим, с помощью батареи 40 и системы 41, 42 электрического управления, которые подают электроэнергию на установку 2 с электродвигателями.
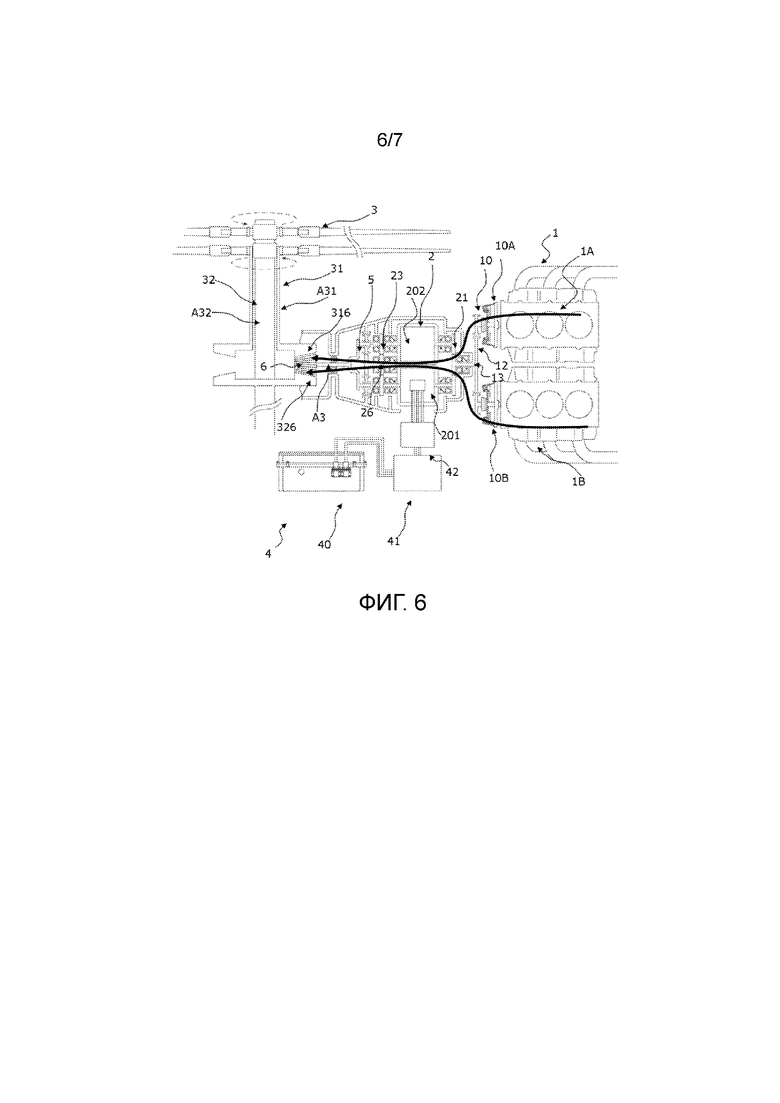
[0105] В соответствии с четвертой рабочей конфигурацией, показанной на Фиг.6, блок управления управляет сцеплением двух тепловых двигателей 1A, 1B для передачи вращательного движения установки 1 с тепловыми двигателями на тяговую систему 3 с лопастями, но без потребления или выработки электрического тока.
[0106] Вращательное движение установки 1 с тепловыми двигателями передается на тяговую систему 3 с лопастями через установку 2 с электродвигателями, которая в этом случае является пассивной. Другими словами, установка 2 с электродвигателями просто служит механической связью в цепи передачи движения между установкой 1 с тепловыми двигателями и силовой установкой 3. Данный режим работы, показанный на Фиг.6, в частности, полезен в случае отказа системы электропитания.
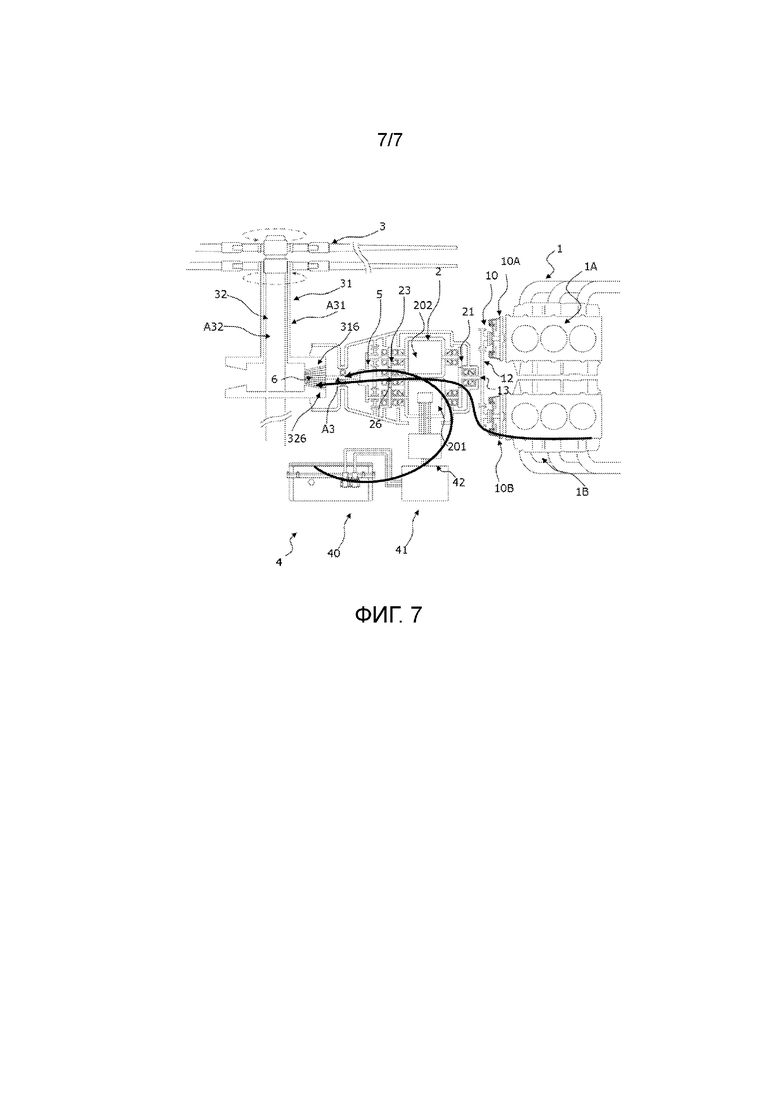
[0107] В соответствии с пятой рабочей конфигурацией, показанной на Фиг.7, блок управления управляет выведением из зацепления одного теплового двигателя 1А из двух тепловых двигателей 1A, 1B, например, в случае неисправности упомянутого теплового двигателя 1A, при этом другой тепловой двигатель 1B остается включенным. Преимущественно, блок управления также управляет системой 4 питания для подачи питания на установку 2 с электродвигателями. Таким образом, тяговая система 3 с лопастями приводится в действие с помощью одного из двух тепловых двигателей 1A, 1B и, предпочтительно, установки 2 с электродвигателями.
[0108] Этот режим работы, показанный на Фиг.7, представляет собой режим работы, полезный, в частности, в случае отказа теплового двигателя.
[0109] Таким образом, в случае отказа одного из тепловых двигателей можно отключить неисправный тепловой двигатель и сохранить мощность оставшегося теплового двигателя, например, 150 кВт, для продолжения обеспечения работы тяговой системы 3. Эта мощность оставшегося теплового двигателя может быть добавлена к мощности электродвигателя для приведения в действие тяговой системы 3, что позволяет обеспечить безопасную посадку летательного аппарата.
[0110] Данный режим работы также может быть использован, например, в конфигурации крейсерского полета для снижения энергопотребления.
[0111] В целом, каждый из тепловых двигателей 1 может быть выключен или может работать на холостом ходу в ожидании использования.
[0112] Конкретные объекты
[0113] Может быть предусмотрено управление системой сцеплений для перехода от одной конфигурации к другой с помощью ручного или автоматического устройства управления, содержащего блок управления. Устройство управления может содержать человеко-машинный интерфейс, соединенный с блоком управления, чтобы позволять пилотам управлять переходом от одной конфигурации силовой установки к другой. Также может быть предусмотрен переход от одной конфигурации силовой установки к другой, запускаемый автоматически посредством блока управления при выполнении заранее заданных условий.
[0114] В частности, может быть предусмотрено, чтобы устройство управления, такое, как компьютер, делало возможным управление системой активации сцеплений для управления переходом от одной конфигурации к другой. Блок управления может быть выполнен в виде процессора или в виде устройства сохранения данных, в котором хранятся компьютерные команды, выполняемые упомянутым процессором, или, также, в виде микроконтроллера.
[0115] Иначе говоря, описываемые функции и этапы могут быть осуществлены с помощью компьютерной программы или аппаратных компонентов (например, программируемых логических матриц). В частности, функции и этапы, выполняемые блоком управления, представленным выше, могут быть выполнены посредством набора команд или компьютерных модулей, осуществляемых в процессоре или контроллере, или могут быть выполнены посредством специализированных электронных компонентов или компонентов типа FPGA или ASIC. Также возможно комбинировать компьютерные и электронные компоненты.
[0116] Изобретение не ограничивается вариантами реализации, показанными на чертежах.
[0117] Кроме того, термин "содержащий" не исключает другие элементы или этапы. Кроме того, признаки или этапы, которые описываются со ссылкой на один из рассматриваемых выше вариантов реализации, также могут быть использованы в комбинации с другими признаками или этапами других вышеупомянутых вариантов реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ФОРСИРОВАНИЯ ГЛАВНОЙ СИЛОВОЙ УСТАНОВКИ | 2017 |
|
RU2743603C2 |
| СПОСОБ И КОНСТРУКЦИЯ КОМБИНИРОВАНИЯ МОЩНОСТИ ТУРБОМАШИНЫ | 2011 |
|
RU2610872C2 |
| СПОСОБ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ЛЕТАТЕЛЬНОМ АППАРАТЕ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ КОНСТРУКЦИЯ ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2610358C2 |
| МАШИНА, СОДЕРЖАЩАЯ ГИБРИДНУЮ ВИНТОМОТОРНУЮ УСТАНОВКУ, И СООТВЕТСТВУЮЩИЙ СПОСОБ ПИЛОТИРОВАНИЯ | 2019 |
|
RU2761151C1 |
| СИЛОВАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА С ВРАЩАЮЩИМСЯ ТРАНСФОРМАТОРОМ ДЛЯ ПОДАЧИ ЭЛЕКТРОЭНЕРГИИ НА ЛОПАСТИ | 2019 |
|
RU2762600C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЬНОЙ УСТАНОВКОЙ НА ВРАЩАЮЩЕЙСЯ ШТАНГЕ | 2018 |
|
RU2770389C2 |
| МОДУЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2816463C1 |
| УСТРОЙСТВО И СПОСОБ МОТОРИЗАЦИИ НАСОСА РАКЕТНОГО ДВИГАТЕЛЯ ПОСРЕДСТВОМ ИНЕРЦИОННОГО КОЛЕСА | 2008 |
|
RU2480608C2 |
Настоящее изобретение в целом относится к аппарату, такому как летательный аппарат, снабженному силовой установкой, содержащей установку с тепловыми двигателями и установку с электродвигателями. Аппарат снабжен силовой установкой, причем силовая установка содержит: тяговую систему с лопастями, установку с тепловыми двигателями, содержащую первый тепловой двигатель и второй тепловой двигатель, выполненную с возможностью приведения в действие тяговой системы с лопастями, установку с электродвигателями, выполненную с возможностью приведения в действие тяговой системы с лопастями, систему электропитания, содержащую батарею, позволяющую подавать питание на установку с электродвигателями, систему сцепления, выполненную с возможностью введения в зацепление любого из тепловых двигателей или каждого из тепловых двигателей для приведения в действие тяговой системы с лопастями. Причем система сцепления также выполнена с возможностью выведения из зацепления любого из тепловых двигателей или каждого из тепловых двигателей относительно тяговой системы с лопастями. При этом установка с электродвигателями расположена последовательно с установкой с тепловыми двигателями, между установкой с тепловыми двигателями и тяговой системой с лопастями. Причем упомянутый аппарат содержит блок управления системой сцепления установки с тепловыми двигателями и системой питания установки с электродвигателями. Причем блок управления выполнен с возможностью выведения из зацепления одного из двух тепловых двигателей в случае неисправности упомянутого теплового двигателя, при этом другой тепловой двигатель остается введенным в зацепление, и управления системой электропитания для подачи питания на установку с электродвигателями для приведения в действие тяговой системы с лопастями с помощью упомянутого другого теплового двигателя, остающегося введенным в зацепление, и установки с электродвигателями. Причем блок управления также выполнен с возможностью выведения из зацепления двух тепловых двигателей и управления системой электропитания для подачи питания на установку с электродвигателями для приведения в действие тяговой системы с лопастями посредством только установки с электродвигателями. Группа изобретений также относится к способу управления таким аппаратом. Группа изобретений обеспечивает повышение безопасности и эффективности движителя, за счет независимого использования источников энергии. 2 н. и 14 з.п. ф-лы, 7 ил.
1. Аппарат (100), снабженный силовой установкой, причем силовая установка содержит:
- тяговую систему (3) с лопастями,
- установку (1) с тепловыми двигателями, содержащую первый тепловой двигатель (1A) и второй тепловой двигатель (1B), выполненную с возможностью приведения в действие тяговой системы (3) с лопастями,
- установку (2) с электродвигателями, выполненную с возможностью приведения в действие тяговой системы (3) с лопастями,
- систему (4) электропитания, содержащую батарею (40), позволяющую подавать питание на установку (2) с электродвигателями,
- систему (10) сцепления, выполненную с возможностью введения в зацепление любого из тепловых двигателей (1A, 1B) или каждого из тепловых двигателей (1A, 1B) для приведения в действие тяговой системы (3) с лопастями, причем система (10) сцепления также выполнена с возможностью выведения из зацепления любого из тепловых двигателей (1A, 1B) или каждого из тепловых двигателей (1A, 1B) относительно тяговой системы (3) с лопастями,
отличающийся тем, что установка (2) с электродвигателями расположена последовательно с установкой (1) с тепловыми двигателями, между установкой (1) с тепловыми двигателями и тяговой системой (3) с лопастями,
причем упомянутый аппарат содержит блок управления системой (10) сцепления установки (1) с тепловыми двигателями и системой (4) питания установки (2) с электродвигателями, причем блок управления выполнен с возможностью выведения из зацепления одного (1А) из двух тепловых двигателей (1A, 1B) в случае неисправности упомянутого теплового двигателя (1A), при этом другой тепловой двигатель (1B) остается введенным в зацепление, и управления системой (4) электропитания для подачи питания на установку (2) с электродвигателями для приведения в действие тяговой системы (3) с лопастями с помощью упомянутого другого теплового двигателя (1B), остающегося введенным в зацепление, и установки (2) с электродвигателями, причем блок управления также выполнен с возможностью выведения из зацепления двух тепловых двигателей (1A, 1B) и управления системой (4) электропитания для подачи питания на установку (2) с электродвигателями для приведения в действие тяговой системы (3) с лопастями посредством только установки (2) с электродвигателями.
2. Аппарат (100) по п.1, отличающийся тем, что представляет собой летательный аппарат.
3. Аппарат (100) по п.1, отличающийся тем, что блок управления выполнен с возможностью введения в зацепление двух тепловых двигателей (1A, 1B) для передачи вращательного движения от установки (1) с тепловыми двигателями на тяговую систему (3) с лопастями через установку (2) с электродвигателями, без расходования или подзарядки электрической батареи (40).
4. Аппарат (100) по п.1, отличающийся тем, что тяговая система (3) с лопастями содержит два несущих винта (31, 32) с лопастями, каждый из которых содержит вертикально вращающийся вал (A31, A32), снабженный лопастями, при этом упомянутые несущие винты (31, 32) выполнены с возможностью вращения, во вращающемся состоянии, в направлениях, противоположных друг другу.
5. Аппарат (100) по п.1, отличающийся тем, что в упомянутом аппарате, содержащем выходной вал (13) установки (1) с тепловыми двигателями, система (10) сцепления установки (1) с тепловыми двигателями расположена между выходными валами тепловых двигателей (1A, 1B) и системой (12) передачи движения, выполненной с возможностью передачи вращательного движения от одного из упомянутых тепловых двигателей или от каждого из упомянутых тепловых двигателей на упомянутый выходной вал (13) установки (1) с тепловыми двигателями.
6. Аппарат (100) по п.5, отличающийся тем, что силовая установка содержит систему (21) понижения скорости, расположенную между выходным валом (13) установки (1) с тепловыми двигателями и входом установки (2) с электродвигателями.
7. Аппарат (100) по п.1, отличающийся тем, что в аппарате, содержащем выходной вал (26) установки с электродвигателями, силовая установка содержит систему (23) передачи движения, расположенную на выходе установки (2) с электродвигателями и выполненную с возможностью передачи вращательного движения от установки (2) с электродвигателями на упомянутый выходной вал (26) установки с электродвигателями.
8. Аппарат (100) по п.1, отличающийся тем, что в аппарате, содержащем выходной вал (26) установки (2) с электродвигателями и входной вал (A3) тяговой системы (3) с лопастями, силовая установка содержит систему (5) понижения скорости, между упомянутым выходным валом (26) установки (2) с электродвигателями и упомянутым входным валом (A3) тяговой системы (3) с лопастями.
9. Аппарат (100) по п.8, отличающийся тем, что входной вал (A3) тяговой системы (3) с лопастями снабжен коническим редуктором (6).
10. Аппарат (100) по п.1, отличающийся тем, что установка (2) с электродвигателями имеет множество электродвигателей (201, 202), распределённых равномерно вокруг центральной оси.
11. Аппарат (100) по п.10, отличающийся тем, что каждый из электродвигателей (201, 202) содержит систему расцепления, позволяющую в случае отказа упомянутого электродвигателя, механически изолировать упомянутый электродвигатель от другого электродвигателя (других электродвигателей).
12. Аппарат (100) по п.1, отличающийся тем, что мощность каждого из тепловых двигателей (1A, 1B) составляет порядка 150 кВт, и мощность установки (2) с электродвигателями составляет порядка 180 кВт.
13. Аппарат (100) по п.1, отличающийся тем, что блок управления выполнен с возможностью введения в зацепление двух тепловых двигателей (1A, 1B) и подачи питания на установку (2) с электродвигателями для приведения в действие тяговой системы (3) с лопастями посредством комбинации двух тепловых двигателей (1A, 1B) и установки (2) с электродвигателями.
14. Аппарат (100) по п.1, отличающийся тем, что блок управления выполнен с возможностью введения в зацепление двух тепловых двигателей (1A, 1B) для приведения в действие установки (2) с электродвигателями так, чтобы и передавать через установку (2) с электродвигателями вращательное движение от установки (1) с тепловыми двигателями на тяговую систему (3) с лопастями, и подзаряжать батарею (40) системы электропитания (4).
15. Аппарат (100) по п.1, отличающийся тем, что упомянутый аппарат содержит корпус, в котором размещается установка (2) с электродвигателями и в котором выполнены отверстия и/или полости для охлаждения установки (2) с электродвигателями, причем упомянутая силовая установка содержит систему водяного охлаждения для охлаждения тепловых двигателей (1A, 1B).
16. Способ управления аппаратом (100) по п.1, отличающийся тем, что способ содержит выведение из зацепления или введение в зацепление одного из тепловых двигателей (1A, 1B) или каждого из тепловых двигателей (1A, 1B) относительно тяговой системы (3) с лопастями и/или управление системой (4) питания установки с электродвигателями для подачи питания на установку (2) с электродвигателями или подзарядки батареи (41).
| FR 3039614 A1, 03.02.2017 | |||
| US 2014283519 A1, 25.09.2014 | |||
| US 2012025032 A1, 02.02.2012 | |||
| US 2009145998 A1, 11.06.2009 | |||
| СПОСОБ СКРЫТОЙ ПЕРЕДАЧИ ЗАШИФРОВАННОЙ ИНФОРМАЦИИ ПО МНОЖЕСТВУ КАНАЛОВ СВЯЗИ | 2011 |
|
RU2462825C1 |
