Настоящее изобретение относится к способу и устройству для проверки шин, например, на линии по производству шин, и, в частности, к способу и устройству для проверки наличия возможных дефектов, расположенных в боковинах шины.
Циклы производств шин обеспечивают изготовление и/или сборку различных компонентов шины на одной или более производственной линии и сырую шину подвергают процессам формования и вулканизации, в которых определяют структуру шины в соответствии с требуемой геометрией, а также рисунок протектора.
Шина при формовании и вулканизации определяется тороидальной структурой, намотанной вокруг оси вращения и, по существу, симметричной относительно осевой средней плоскости, перпендикулярной этой оси вращения. В частности, тороидальная структура имеет корону, расположенную по существу перпендикулярно осевой средней плоскости в радиально внешней области шины, два борта, расположенные в радиально внутренней части шины, соответственно, на противоположных сторонах от осевой средней плоскости, и две боковины, проходящие, соответственно, с противоположных сторон от осевой средней плоскости между одним из бортов и короной.
Термин "осевая средняя плоскость" означает плоскость, перпендикулярную оси вращения и равноудаленную от внешних в осевом направлении частей шины.
Термин "корона" шины означает часть шины, расположенную, по существу, перпендикулярно осевой средней плоскости, содержащую беговой пояс шины, и структуру брекера и структуру каркаса, расположенные радиально внутри относительно бегового пояса.
Термин "борта" шины, также именуемые "закраинами шины", означают радиально внутренние части шины, соответственно, расположенные на противоположных сторонах от осевой средней плоскости и выполненные с возможностью зацепления с ободом колеса.
Термин "боковины" шины означает те части шины, которые проходят с аксиально противоположных сторон от осевой средней плоскости между каждым из бортов и короной, соответствующие так называемым боковым стенкам и частям структуры каркаса, расположенным в аксиально внутреннем положении относительно таких боковин.
Термины "опорная боковина" и "свободная боковина" шины означают, соответственно, боковую часть шины, лежащую на опорной плоскости и противоположную боковую часть, расположенную на некоторой высоте над опорной плоскостью.
Термины "внешняя поверхность" или "внутренняя поверхность" шины или ее частей означают, соответственно, поверхность, остающуюся видимой после монтажа шины на обод, и которые невидимы после такого монтажа. Внешняя и внутренняя поверхности определяют границы шины.
Термин "базовая окружность" шины означает заданную кольцевую поверхность на внешней или внутренней поверхности шины, в частности, короны шины.
Термин "измеряемая поверхность" означает поверхность, предназначенную для проверки, имеющую небольшие размеры относительно совокупной поверхности боковин.
Термин "профиль шины" означает контур по меньшей мере части поверхности шины, предпочтительно по меньшей мере одной из внешней поверхности и внутренней поверхности шины. Предпочтительно, он означает контур в радиальной плоскости сечения, содержащей ось вращения шины.
Термин "изображение" или "цифровое изображение" означает в общем виде набор данных, типично содержащихся в компьютерном файле, в котором каждая координата (типично двухмерная) конечного набора (типично двухмерного и матричного, т.е., N строк ˟ M колонок) пространственных координат (каждый из которых соответствует пикселю) связан с соответствующим набором цифровых величин (которые могут быть представлены разными типами значений). Например, в монохроматических изображениях (например, в оттенках серого) такой набор величин совпадает с одной величиной в конечной шкале (типично с 256 уровнями или тонами), и такая величина представляет, например, уровень яркости (или интенсивности) соответствующей пространственной координаты при визуализации, тогда как в цветных изображениях такой набор величин представляет уровень яркости разных цветов, или каналов, типично - основных цветов (например, в системе RGB - красный, зеленый и синий, а в системе CMYK - циан, пурпурный, желтый, черный). Термин "изображение" не обязательно подразумевает реальную его визуализацию.
Каждая ссылка на конкретное "цифровое изображение" (например, изначально полученное двухмерное цифровое изображение шины) в более общей форме охватывает любое цифровое изображение, получаемое цифровой обработкой этого конкретного цифрового изображения (например, фильтрованием, выравниванием, пороговой обработкой, морфологическими преобразованиями -"открыванием" и т.п., вычислением градиентов, сглаживанием и т.д.).
Термин "высота" части шины или базовой окружности означает величину относительно базовой плоскости координаты точки части шины или базовой окружности, например, предпочтительно, координаты по оси Z относительно опорной плоскости. В настоящем описании ось Z предпочтительно определяется как ось, параллельная оси вращения шины, установленной во время проверки (лежащей на опорной плоскости).
В US 2006/0272408 описаны способ и устройство для измерения однородности шины. Способ содержит этапы, на которых монтируют шину на шпиндель, прижимают периферийную поверхность вращающегося барабана к беговому поясу шины с первым усилием прижимания, вращают шину вокруг оси, и рассчитывают силы на первой и второй плоскостях шины вычислительным средством, когда шина вращается.
В WO 2015/079370 того же заявителя описано устройство для проверки шин, содержащее опорную плоскость, выполненную с возможностью принимать шину с осевой средней плоскостью, проходящей параллельно опорной плоскости, определяют опорную боковину и свободную боковину, расположенные на определенной высоте относительно опорной плоскости. Инструмент выполнен с возможностью прилагать к измеряемой поверхности свободной боковой части силу, направленную к опорной плоскости. Положение привода оперативно связывается с инструментом и предназначено для перемещения инструмента, при этом по меньшей мере один компонент движения перпендикулярен оси вращения шины. Устройство также содержит устройства для изменения углового положения измеряемой поверхности. Блок управления запрограммирован на обнаружение первой величины выходной точки отсчета в каждом положении измеряемой поверхности как функции первой величины входной точки отсчета, поддерживаемой по существу постоянной на протяжении по меньшей мере одного полного оборота измеряемой поверхности вокруг оси вращения для на обнаружение второй величины выходной точки отсчета в каждом положении измеряемой поверхности. Вторая величина выходной точки отсчета соответствует второй величине входной точки отсчета, поддерживаемой по существу постоянной на протяжении по меньшей мере одного полного оборота измеряемой поверхности. Блок управления содержит модуль, запрограммированный на расчет разницы между второй величиной выходной точки отсчета и первой величиной выходной точки отсчета в каждом положении измеряемой поверхности.
В известных циклах производства для идентификации дефектов сформованную и вулканизированную шину подвергают ручной визуальной проверке или автоматической проверке как, например, описано в вышеупомянутом документе.
Одна из таких ручных визуальных проверок направлена на выбраковку шин, в которых боковина имеет низкую жесткость, т.е. на идентификацию дефекта, именуемого "слабая боковина", где термин "боковина" означает боковую часть готовой шины.
Заявитель обнаружил, что точность проводимых до сих пор ручных проверок в большой степени зависит от опыта рабочего, отвечающего за проверку, и в значительной степени субъективна.
Заявитель обнаружил, что применение автоматических проверок шины, описанных в US 2006/0272408 может повысить объективность самой проверки, но из-за большого количества сопутствующих факторов точность измерений и повторяемость процесса проверки не гарантируются.
Как описано в WO 2015/079370 заявитель разработал устройство и способ обнаружения дефекта "слабая стенка", согласно которым устанавливают проверяемую шину на опорную плоскость в соответствии с не измененными способами проводимой проверки, и воздействуют на свободную боковину в течение одинаковых или разных периодов времени силами разной величины. Таким образом, можно уменьшить некоторые факторы, ведущие к неуверенной повторяемости проверки и влияющие на хороший результат.
Однако, заявитель обнаружил, что проверка, описанная в WO 2015/079370, хотя и решает некоторые из вышеуказанных проблем, занимает относительно длительное время, поскольку для ее проведения нужно выполнить воздействие на свободную боковину шины по меньшей мере двумя силами или движениями, что подразумевает повторение проверки по меньшей мере дважды на всех этапах, что увеличивает общее время ее проведения.
Кроме того, чтобы иметь возможность правильно идентифицировать часть шины, в которой имеется дефект, необходимо выполнить описанную операцию сжатия и деформации на обеих боковинах шины, что требуем переворачивания шины, чтобы можно было проверить обе ее боковины.
Более того, даже если измерения выполняются на обеих боковинах шины в соответствии с WO 2015/079370, иногда могут возникать "неопределенные" случаи, когда результаты измерений не позволяют определить, имеется дефект или нет.
Заявитель понял, что установив проверяемую шину на опорную плоскость и деформируя ее боковину, но одновременно измеряя реакцию на деформацию боковины относительно жесткой части самой шины, все факторы, ведущие к возникновению случаев неопределенности можно уменьшить, и длительность времени цикла также можно сократить, и даже значительно.
Заявитель, наконец, обнаружил, что установка шины на опорную плоскость, последующее приложение силы к боковине шины, и одновременное измерение высоты базовой окружности, расположенной снаружи от боковин, решает проблемы, описанные выше, позволяя минимизировать время цикла, избегая также вышеописанного переворота шины и возникновения случаев "неопределенности".
Точнее, согласно первому аспекту, настоящее изобретение относится к способу проверки шин.
Предпочтительно, укладывают шину, имеющую ось вращения, на опорную плоскость, определяя опорную боковину, при этом свободная боковина расположена на некоторой высоте над опорной плоскостью, а корона расположена между свободной боковиной и опорной боковиной.
Предпочтительно, выбирают базовую окружность шины, проходящую по короне.
Предпочтительно, подводят инструмент к шине, уложенной на опорную плоскость так, чтобы он лежал на измеряемой поверхности, при этом измеряемая поверхность является частью внешней поверхности свободной боковины.
Предпочтительно, толкают измеряемую поверхность инструментом так, чтобы приложить силу к измеряемой поверхности, направленную к опорной плоскости, создавая деформированную измеряемую поверхность, расположенную на инструментальной высоте.
Предпочтительно, во время операции толкания приводят шину во вращение относительно инструмента по меньшей на один полный оборот вокруг оси вращения.
Предпочтительно, во время вращения на полный оборот измеряют высоту базовой окружности.
Предпочтительно, на основе измеренной высоты базовой окружности определяют, имеет ли шина дефект.
Заявитель считает, что способ по настоящему изобретению решает описанные проблемы, благодаря разным факторам. Действительно, согласно настоящему изобретению, прижимают боковину шины, т.е., прилагают к ней силу. Боковины шины, включая так называемые "боковые стенки", и их борта, являются относительно "деформируемыми" и, следовательно, в результате приложения силы деформация меняет свои пространственные координаты. При приложении силы к участку боковины шины, на противоположной боковине, уложенной на опору, изменяется высота того участка боковины шины, к которому приложена сила. Однако это изменение высоты может быть вызвано и деформацией боковины, к которой приложена сила, и деформацией противоположной боковины, лежащей на опоре, или, как часто бывает, и тем, и другим. Деформацией короны можно пренебречь. Фактически корона между двумя боковинами является более жесткой по сравнению с боковинами и, поэтому труднее поддается деформации. Путем проверки изменений высоты части этой короны, например, учитывая изменения высоты базовой окружности, возникшие в короне, и взятой за точку отсчета, можно определить, является ли деформация "избыточной" для одной из двух боковин, или, в любом случае, превышает ли одна деформация другую и, следовательно, имеется ли дефект.
Например, можно определить, когда вдавленность измеряемой части шины имеет величину D, вызвана ли эта вдавленность D почти исключительно боковиной, лежащей на опоре и, следовательно, высота базовой окружности изменится на величину, близкую к D, или свободной боковиной, и в этом случае высота базовой окружности изменится незначительно.
Термин "вдавленность" означает разницу между высотой точки покоя (т.е., без деформации) и высотой той же точки во время деформации.
Относительное вращение между шиной и инструментом позволяет определить наличие дефектов в любом угловом положении шины, поскольку сила прилагается на протяжении всех 360° окружности шины.
Кроме того, можно комбинировать измерение высоты базовой окружности с другими измерениями, например, измерениями инструментальной высоты деформируемой измеряемой поверхности (части боковины шины) или приложенной инструментом силы, чтобы выявить относительно "сомнительные" случаи, когда одного измерения недостаточно.
Следовательно, согласно способу по настоящему изобретению, нет необходимости переворачивать шину на 180° перпендикулярно оси вращения чтобы проверить обе боковины, достаточно одного измерения. Поэтому время, затрачиваемое на измерения, сокращается.
Заявитель считает, что, используя вышеописанное решение, способ проверки шин позволяет создать промышленную автоматизированную систему проверки шин, собираемых/производимых на любом производственном предприятии, включая предприятия, выпускающие большое количество моделей шин, даже существенно отличающихся друг от друга, в то же время выполняя вышеописанные требования с особым вниманием к точности/повторяемости проверок, к совместимости с временем цикла сборки/производства и к гибкости и конкретности всей системы проверки для каждой модели шин.
Согласно второму аспекту, настоящее изобретение относится к устройству для проверки шин.
Предпочтительно, имеется опорная плоскость, на которую укладывают шину так, чтобы, шина определяла опорную боковину, свободную боковину, находящуюся на некоторой высоте от опорной плоскости, и корону, расположенную между свободной боковиной и опорной боковиной шины.
Предпочтительно, имеется инструмент, предназначенный для приложения силы, направленной к опорной плоскости, к изменяемой поверхности свободной боковины шины так, чтобы она приняла инструментальную высоту.
Предпочтительно имеется позиционирующий привод, оперативно соединенный с инструментом и выполненный с возможностью перемещать инструмент к шине.
Предпочтительно имеется вращающее устройство для изменения углового положения измеряемой поверхности относительно инструмента.
Предпочтительно, имеется первый датчик высоты, выполненный с возможностью измерения высоты базовой окружности, идентифицированной в короне шины.
Предпочтительно, имеется блок управления.
Предпочтительно, блок управления запрограммирован на посылку команды на позиционирующий привод так, чтобы подвести инструмент к шине, уложенной на опорную плоскость, чтобы он лежал на измеряемой поверхности, и толкал измеряемую поверхность с помощью инструмента для приложения силы к измеряемой поверхности, направленной к опорной поверхности.
Предпочтительно, блок управления запрограммирован на посылку во время операции толкания сигнала на вращающее устройство для вращения шины относительно инструмента.
Предпочтительно, блок управления запрограммирован на обработку сигнала от первого датчика высоты так, чтобы измерять высоту базовой окружности во время вращения.
Предпочтительно, блок управления запрограммирован на индикацию наличия дефекта в шине на основе измеренной высоты базовой окружности.
Заявитель считает, что устройство по настоящему изобретению решает описанные проблемы и позволяет применять способ по первому аспекту настоящего изобретения. В частности, заявитель считает, что измерение датчиком высоты базовой окружности во время приложения силы, которая генерирует деформацию, позволяет проверкой только одной из двух боковин идентифицировать дефекты в обеих боковинах, а также определить, в которой из них имеется дефект. Поэтому время цикла сокращается вдвое.
Настоящее изобретение по меньшей мере в одном из вышеописанных аспектах может иметь по меньшей мере один из следующих предпочтительных признаков.
Предпочтительно, во время относительного вращения инструмент находится в последовательном контакте с множеством разных измеряемых поверхностей на внешней поверхности свободной боковины, разнесенных по углу.
Предпочтительно, измеряют инструментальную высоту на измеряемой поверхности на протяжении полного оборота и/или измеряют силу, прилагаемую инструментом к измеряемой поверхности на протяжении полного оборота.
Предпочтительно, определяют наличие дефекта шины на основе измеренной инструментальной высоты и/или измеренной силы инструмента.
Предпочтительно, измерение высоты базовой окружности как индикатора наличия дефектов шины комбинируют с другими измерениями. Например, также на протяжении полного оборота измеряют высоту измеряемой поверхности, именуемой инструментальной высотой. Предпочтительно, также измеряют силу, которая генерирует деформацию, также именуемую силой инструмента, прилагаемую к измеряемой поверхности. Эти две дополнительные величины, кроме того, могут указывать на наличие или отсутствие дефектов. Фактически большая вдавленность, т.е., инструментальная высота, существенно отличающаяся от высоты покоя инструмента, в некоторой точке шины при относительно умеренной силе может указывать на наличие дефекта. Альтернативно, минимальная вдавленность при очень большой приложенной силе может указывать на наличие дефекта. Комбинируя разные измерения, таким образом, можно идентифицировать множество дефектов в шине при умеренной длительности цикла.
Предпочтительно, сила инструмента содержит по меньшей мере один компонент, параллельный оси вращения шины.
Предпочтительно, силу инструмента, прилагаемую к измеряемым поверхностям, поддерживают по существу постоянной на протяжении по меньшей мере одного полного оборота вокруг оси вращения.
Из-за сжатия, создаваемого силой инструмента, измеряемая поверхность перемещается на инструментальную высоту, которая, предпочтительно, измеряется. Величины этой инструментальной высоты могут, например, идентифицировать наличие или отсутствие дефектов, таких как слабая боковина. Хотя прилагаемая сила инструмента во время вращения в этом предпочтительном примере постоянна, отсутствует уверенность, что инструментальная высота, на которую перемещается измеряемая поверхность, остается постоянной во время вращения, поскольку она зависит от внутренней структуры исследуемой боковины шины.
Предпочтительно, для поддержания постоянства силы, прилагаемой к измеряемой поверхности во время полного оборота шины, устанавливают точку "нулевой высоты", т.е., положение свободной боковины шины в положении покоя, т.е., до деформации, которая используется как начальная точка деформации. Другими словами, измеряют профиль по меньшей мере одной части свободной боковины шины чтобы узнать, на какой высоте позиционировать инструмент для определения места приложения силы. Этот профиль определяет точку нулевой высоты, в которую упирается инструмент. В базе данных могут храниться разные профили, поэтому для каждой модели шины ее профили и, следовательно, положение "нулевой точки" известно.
Более предпочтительно, сила инструмента составляет от 10 Н до 150 Н.
В ходе лабораторных испытаний заявитель убедился, что высота, на которую нужно привести измеряемую поверхность или сила, прилагаемая к измеряемой поверхности, если она находится в этих пределах, такова, что создает существенное движение, но всегда в поле упругости, свободной боковины шины, что позволяет оценить реакцию в терминах, например, жесткости.
Предпочтительно, альтернативно, инструментальную высоту измеряемых поверхностей поддерживают по существу постоянной на протяжении по меньшей мере одного полного оборота вокруг оси вращения.
В этом случае во время вращения предпочтительно изменяют силу инструмента, которая может меняться во время вращения, и приложенную к измеряемым поверхностям.
Если желательно привести измеряемую поверхность на постоянную высоту во время такого относительного вращения, предпочтительно определяют точку "нулевой высоты", от которой начинается вдавленность, т.е. точка, от которой рассчитывается, на сколько нужно сжать силу для достижения требуемой инструментальной высоты. Предпочтительно, "нулевую высоту" сначала определяют, обрабатывая трехмерный профиль шины, хранящийся, например, в соответствующем запоминающем устройстве. Альтернативно, "нулевую точку" измеряют непосредственно, когда шина лежит на опоре. Взяв эту высоту или эти высоты из трехмерного профиля шины и определив, какой операции ее/их следует подвергнуть для определения высоты устройства, измеряемую поверхность деформируют так чтобы подвести ее к опорной плоскости до этой величины, т.е., до расстояния между опорной плоскостью и деформированной поверхностью шины, которое поддерживается постоянным на протяжении полного оборота.
Альтернативно, инструментальная высота, к которой приводят шину, может зависеть от множества высот, т.е., например, определяют множество точек от 1 до n трехмерного профиля, рассчитывают статистическую величину (среднее, медиану, и т.д.) и из этой статистической величины вычитают постоянную величину, которая является желаемой вдавленностью.
Вдавленность предпочтительно составляет от прибл. 5 мм до прибл. 20 мм.
В обоих случаях, если инструмент создает такую деформацию, положение на вертикальной оси инструмента, который деформирует поверхность шины, остается по существ неизменным во время относительного поворота на 360° между инструментом и шиной.
Предпочтительно, определяют среднюю высоту относительно опорной плоскости множества точек этого трехмерного профиля измеряемой поверхности модельной шины.
В предпочтительном примере высота, на которую устанавливается модельная шина, то есть, предпочтительно удерживаемая на протяжении всего полного оборота шины, является функцией средней высоты множества точек, принадлежащих измеряемым поверхностям. Из такой средней высоты, рассчитанной по трехмерному профилю шины, можно разными способами вывести высоту устройства.
Предпочтительно, задают величину требуемой инструментальной высоты, к которой нужно привести деформированную поверхность.
Предпочтительно, задают величину максимальной силы инструмента.
Предпочтительно толкают измеряемую поверхность инструментом так, чтобы измеряемая поверхность достигла требуемой инструментальной высоты.
Предпочтительно, измеряют силу инструмента во время операции проталкивания.
Предпочтительно, блокируют операцию проталкивания, если сила инструмента достигает и/или превышает максимальную силу инструмента.
Предпочтительно, поддерживают максимальную силу инструмента на протяжении одного полного оборота вокруг оси вращения.
Шины, в зависимости от размера, модели и относительных размерных соотношений, оказывают неодинаковое сопротивление деформации и, следовательно, деформируются неодинаково. Например, чрезмерная деформация шины может привести к ее необратимому повреждению и/или к невозможности точно определить возможное наличие дефектов. Слишком "маленькая" деформация может не позволить обнаружить дефекты небольшого размера. Поэтому, даже ели нужно деформировать шину до тех пор, пока измеряемая поверхность не придет на требуемую инструментальную высоту, если это влечет риск повреждения шины, преимущественно следует ассоциировать максимальную силу инструмента и удерживать ее постоянной на измеряемых поверхностях, когда во время измерения достижение заданной инструментальной высоты может повлечь применение чрезмерной силы. В этом случае, хотя измерение должно проводиться на "постоянной" высоте, измерение производится с "постоянной" силой, равной заданной максимальной силе инструмента.
Предпочтительно, создают базу данных, включающую множество моделей шин, при этом каждая модель из множества ассоциируется с высотой покоя свободной боковины.
Предпочтительно, определяют модель шины, уложенной на опорную плоскость.
Предпочтительно, извлекают из базы данных величину высоты покоя, ассоциированную с определенной моделью шины.
Предпочтительно, толкают измеряемую поверхность инструментом до инструментальной высоты от высоты покоя, полученной из базы данных, или толкают измеряемую поверхность инструментом от высоты покоя, полученной из базы данных с силой инструмента.
Таким образом, "профиль" множества разных моделей шин хранится в базе данных. Эти профили используются для определения "нулевой высоты" от которой вычисляют желательную вдавленность так, чтобы привести шину на требуемую инструментальную высоту. Таким образом, расчет инструментальной высоты не зависит от других систем отсчета, как например, положение опоры, что обеспечивает большую точность при сжатии шины на требуемой высоте.
Предпочтительно, укладка шины, имеющей ось вращения, на опорную плоскость включает укладку этой шины не опорную плоскость так, чтобы осевая средняя плоскость была по существу параллельна опорной плоскости.
Таким образом, имеются участки внешней поверхности шины, которые по существу параллельны опорной плоскости или имеют по существу постоянную высоту над опорной плоскостью на ее продолжении вокруг оси вращения шины.
Предпочтительно, шина имеет беговой пояс, и выбор базовой окружности включает выбор базовой окружности на этом беговом поясе.
Базовую окружность предпочтительно выбирают на беговом поясе шины так, чтобы на была определена на внешней поверхности шины, напротив которой имеется больше пространства для установки датчика, относительно малого объема, присутствующего в центре шины, когда эта окружность определена на внутренней поверхности. Кроме того, беговой пояс является относительно "жесткой" частью шины и, поэтому, относительно меньше деформируется при приложении силы.
Следовательно, изменения его высоты по существу вызваны изменениями высоты свободной или опорной боковины шины.
Предпочтительно, определение наличия дефекта в шине на основе высоты базовой окружности включает определение, имеет ли шина дефект в опорной боковине или в свободной боковине на основе высоты базовой окружности.
Более предпочтительно, определяют высоту покоя базовой окружности; определяют разницу между этой высотой покоя и высотой инструмента во время полного оборота; и на основе этой разницы определяют, имеет ли шина дефект в опорной боковине или в свободной боковине.
Еще более предпочтительно, определение наличия дефекта в опорной боковине или в свободной боковине на основе этой разницы включает определение, превышает ли эта разница первую пороговую величину или она меньше второй пороговой величины.
Измерение высоты базовой окружности позволяет установить, помимо прочего, в случае наличия так называемого дефекта "слабая боковина", находится ли этот дефект в свободной боковине или в опорной боковине без необходимости в проверке обеих боковин, поскольку проверяется только одна боковина. Фактически, когда имеется деформация измеряемой поверхности шины на определенную величину, т.е. вдавленность измеряемой поверхности шины до инструментальной высоты, базовая окружность также "вдавливается" и переходит на другую определенную высоты. Термин "вдавленность" определяет величину (по модулю):
вдавленность: Высота покоя - Высота во время деформации (= инструментальная высота)
где термин высота означает ординату точки измеряемой поверхности или базовой окружности на вертикальной оси Z, которая считается параллельной оси вращения шины и, следовательно, перпендикулярной опорной плоскости.
Следовательно, предпочтительно, для каждой точки измеряемой поверхности сначала вычисляется ее высота покоя, т.е., до сжатия, а затем ее инструментальная высота, когда приложена сила инструмента. По сути, для каждой измеряемой поверхности устанавливается точка, для которой измеряется и высота покоя, и инструментальная высота так, что во время углового движения шины инструментальная высота соответствующей точки продолжает измеряться для каждой последующей измеряемой поверхности. То же самое выполняется и для базовой окружности.
Высоту покоя можно измерить тем же способом или ее можно хранить в трехмерном профиле в базе данных
В зависимости от отношений между вдавленностью измеряемой поверхности шины и вдавленностью базовой окружности, рассматривая точку в одном и том же угловом положении шины, можно проверить, имеется ли дефект слабой боковины в опорной боковине (базовая окружность имеет "надлежащую" вдавленность) или в свободной боковине (вдавленность базовой окружности "мала").
Следовательно, можно определить первый и второй пороги, которые могут быть функцией величины вдавленности измеряемой поверхности так, чтобы если вдавленность базовой окружности, например, взятую как среднее или медиану всех конкретных величин вдавленности на протяжении оборота шины как общую величину вдавленности, будет ниже определенного порога, слабой боковиной будет свободная боковины, а если выше второго порога, то слабой боковиной будет боковина, лежащая на опорной плоскости.
Предпочтительно, получают изображение участка базовой окружности во время вращения.
Преимущественно, в каждом угловом положении получают изображение базовой окружности. Предпочтительными являются цифровые изображения, поскольку известны различные системы обработки изображений, которые очень быстро и точно измеряют движения и изменения высоты базовой точки. Поэтому, таким образом, измерительная система является особенно быстрой и точной, минимизируя время цикла.
Более предпочтительно, получают первое изображение части базовой окружности в положении покоя, получают второе изображение части базовой окружности во время вращения в том же угловом положении, в котором было получено первое изображение, и определяют разницу, сравнивая первое и второе изображения.
Движение предпочтительно рассчитывают, сравнивая два изображения друг с другом. Расчет разницы осуществляется быстро и точно и выполняется, например, подходящим программным обеспечением.
Предпочтительно, силу инструмента, прилагаемую к измеряемым поверхностям удерживают по существу постоянной в всем по меньшей мере одном полном обороте вокруг оси вращения; измеряют инструментальную высоту этой измеряемой поверхности во множестве относительных угловых положений между шиной и инструментом на протяжении этого полного оборота; и этап определения наличия дефекта в шине на основе этой высоты базовой окружности и на основе инструментальной высоты измерительной поверхности включает этап, на котором классифицируют шину как имеющую дефект, если по меньшей мере одна инструментальная высота, измеренная на этом полном обороте, выходит за пределы заданного диапазона величин высоты.
Следовательно, если для некоторой заданной величины силы инструмента, которая остается постоянной во время вращения, деформация является "большой", т.е. если измеренное вдавливание измеряемой поверхности, например, превышает некоторую заданную величину, так, что разница между измеренной высотой инструмента точки на измеряемой поверхности и высотой той же точки в состоянии покоя больше некоторой величины, тогда делается вывод, что искомый дефект присутствует и шину, предпочтительно, отбраковывают.
Фактически чрезмерная деформация для данной приложенной силы инструмента указывает на внутреннюю слабость шины по меньшей мере в одной ее части. Альтернативно, деформация может быть "слишком мала" для величины приложенной силы, что указывает на излишне жесткую шину.
Постоянное измерение высоты базовой окружности позволяет распознавать неопределенные случаи и, возможно, определять в какой боковой части шины этот дефект присутствует.
Предпочтительно, инструментальную высоту измерительных поверхностей поддерживают по существу постоянной на протяжении по меньшей мере одного полного оборота вокруг оси вращения; измеряют инструментальную высоту этой измеряемой поверхности во множестве относительных угловых положений между шиной и инструментом на протяжении этого полного оборота; и этап определения наличия дефекта в шине на основе этой высоты базовой окружности и на основе силы инструмента, прилагаемой во время операции проталкивания включает эта, на котором классифицируют шину как содержащую дефект, если по меньшей мере одна величина измеренной силы инструмента, приложенной по меньшей мере к одной измеряемой поверхности на протяжении этого полного оборота выходит за пределы заданного диапазона величин.
Аналогично случаю с постоянной силой, если для заданной инструментальной высоты сила инструмента, приложенная для достижения такой инструментальной высоты, чрезмерна или слишком мала, это, вероятно указывает на дефект в шине, которая, соответственно, слишком слаба или слишком жестка.
Постоянное измерение высоты базовой окружности позволяет распознавать неопределенные случаи и, возможно, определять в какой именно боковине шины этот дефект присутствует.
Предпочтительно, имеется второй датчик высоты, выполненный с возможностью измерять высоту измеряемой поверхности во множестве относительных угловых положениях между шиной и инструментом на протяжении полного оборота.
Предпочтительно, имеется датчик приложенной силы для измерения силы инструмента, прилагаемой инструментом к измеряемой поверхности во время этого полного оборота.
Второй датчик высоты является предпочтительным для получения возможности определять инструментальную высоту измеряемой поверхности так, чтобы определить ее вдавливание. Такой датчик предпочтительно может иметь лазерную указку.
Датчик силы выполнен с возможностью измерять силу инструмента во время вращения так, чтобы выделить изменения или из величины, которые могут способствовать обнаружению наличия дефектов.
Предпочтительно блок управления запрограммирован на обработку сигнала, приходящего от второго датчика высоты так, чтобы определять эту инструментальную высоту во время вращения.
Предпочтительно блок управления запрограммирован на обработку сигнала, приходящего от датчика силы так, чтобы определять эту силу инструмента во время вращения.
Предпочтительно, блок управления запрограммирован на индикацию наличия дефекта в шине на основе высоты базовой окружности и инструментальной высоты измеряемой поверхности и/или силы инструмента, прилагаемой инструментом.
Наличие дефектов предпочтительно оценивают на основе комбинации сигналов, т.е., силы инструмента или инструментальной высоты, которые помогают понять большую или меньшую жесткость шины, и высоты базовой окружности.
Предпочтительно, блок управления выполнен с возможностью управлять первым позиционирующим приводом так, чтобы инструмент прилагал по существу постоянную силу к измеряемой поверхности во время вращения, или позиционирует измеряемую поверхность на по существу постоянной высоте относительно опорной плоскости во время такого вращения.
Измерения предпочтительно выполняют при постоянной инструментальной высоте во время вращения, или при постоянной силе инструмента.
Предпочтительно первый датчик высоты содержит видеокамеру.
Более предпочтительно, видеокамера является двухмерной видеокамерой.
Еще более предпочтительно, видеокамера выполнена с возможностью снимать изображения базовой окружности и посылать эти изображения на блок управления.
Видеокамера имеет достаточное быстродействие, чтобы получать множество изображений при требуемой частоте вращения шины; такие камеры имеются на рынке и легко доступны. Это также обеспечивает высокую точность измерений, которые предпочтительно выполняются путем сравнения изображений.
Предпочтительно инструмент содержит упорный ролик.
Более предпочтительно упорный ролик установлен с возможностью свободного вращения вокруг своей оси.
Преимущественно, деформация возникает в результате опоры ролика на измеряемую поверхность шины. Ролик, имеющий возможность вращаться, удерживает эту поверхность прижатой во время вращения шины вокруг ее оси вращения, поэтому эту поверхность можно проверять в любом угловом положении. Когда шину приводят во вращение, положение ролика не меняется, и он вращается вокруг своей оси в результате вращения поверхности шины, с которой он контактирует.
Предпочтительно, позиционирующий привод, оперативно соединенный с инструментом, содержит линейный электродвигатель.
С помощью линейного электродвигателя можно точно регулировать положение инструмента и его расстояние до внешней поверхности шины.
Предпочтительно, позиционирующий привод содержит второй датчик высоты и первый датчик силы.
В случае использования линейного электродвигателя, эти признаки уже присутствуют в качестве признаков самого двигателя, что минимизирует количество компонентов, используемых в устройстве.
Другие признаки и преимущества изобретения будут понятны из нижеследующего описания способа и устройства для проверки шин, приводимого для иллюстрации и не ограничивающего объем изобретения, со ссылками на приложенные чертежи, на которых:
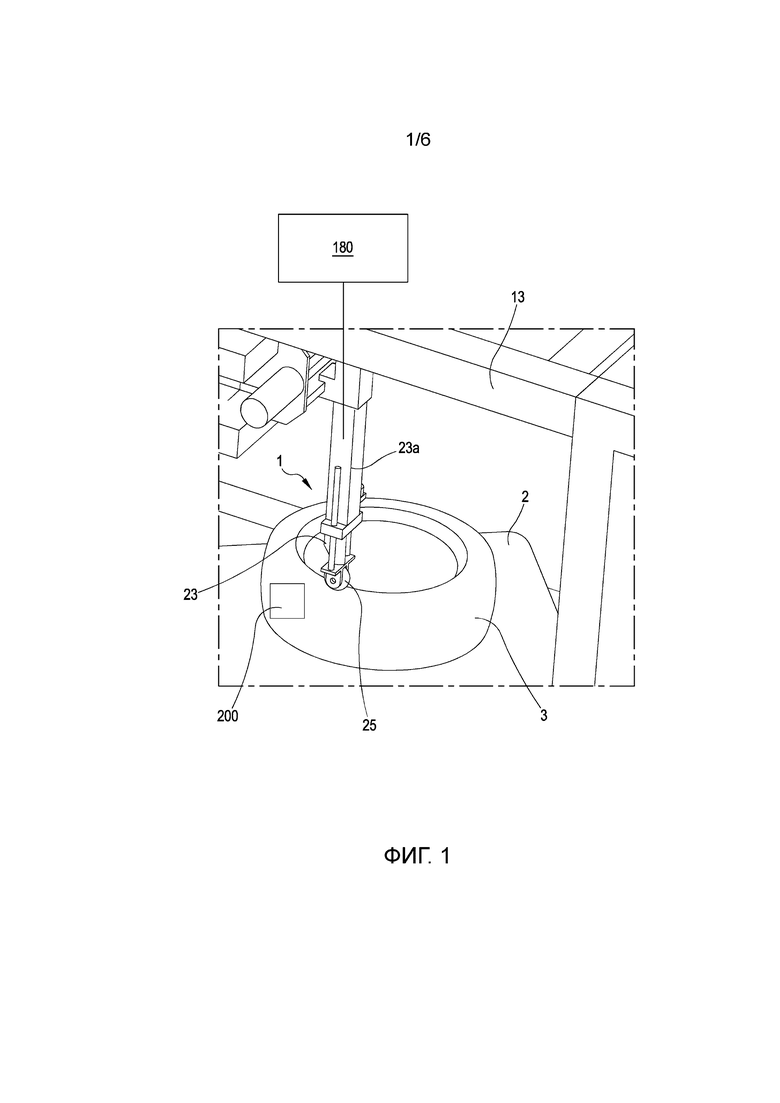
Фиг. 1 - схематический вид в перспективе устройства по настоящему изобретению.
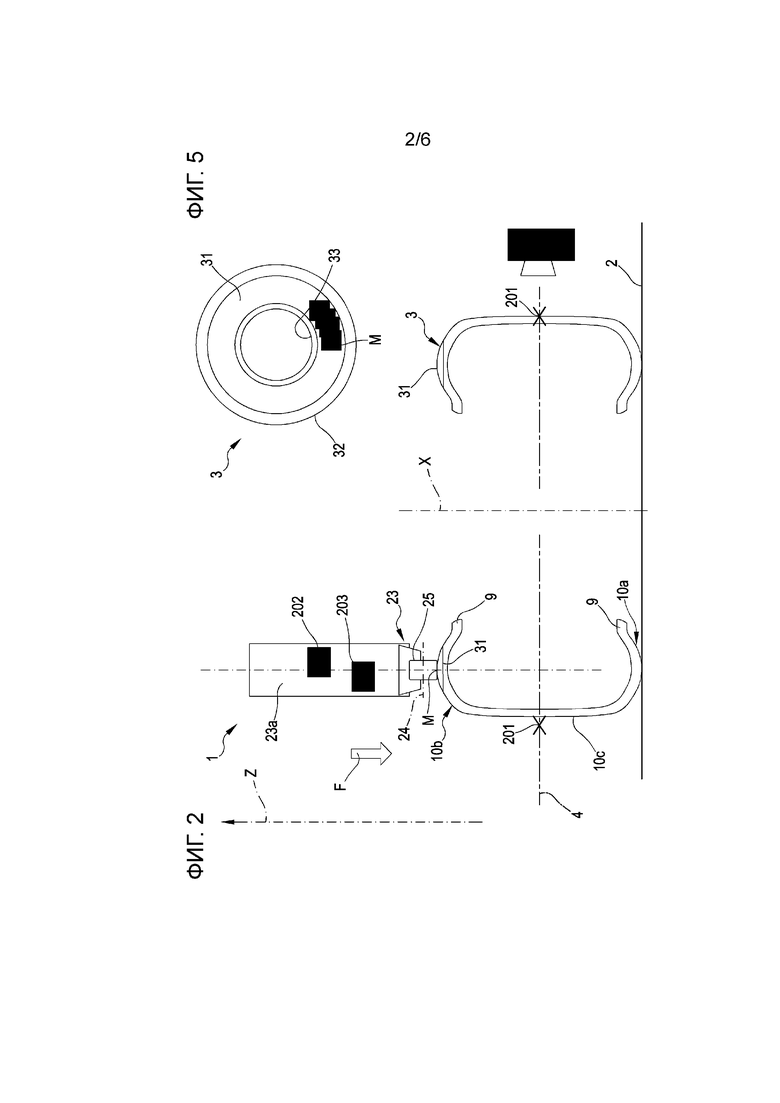
Фиг. 2 - схематический вид сбоку в сечении устройства по фиг. 1 в другом оперативном состоянии.
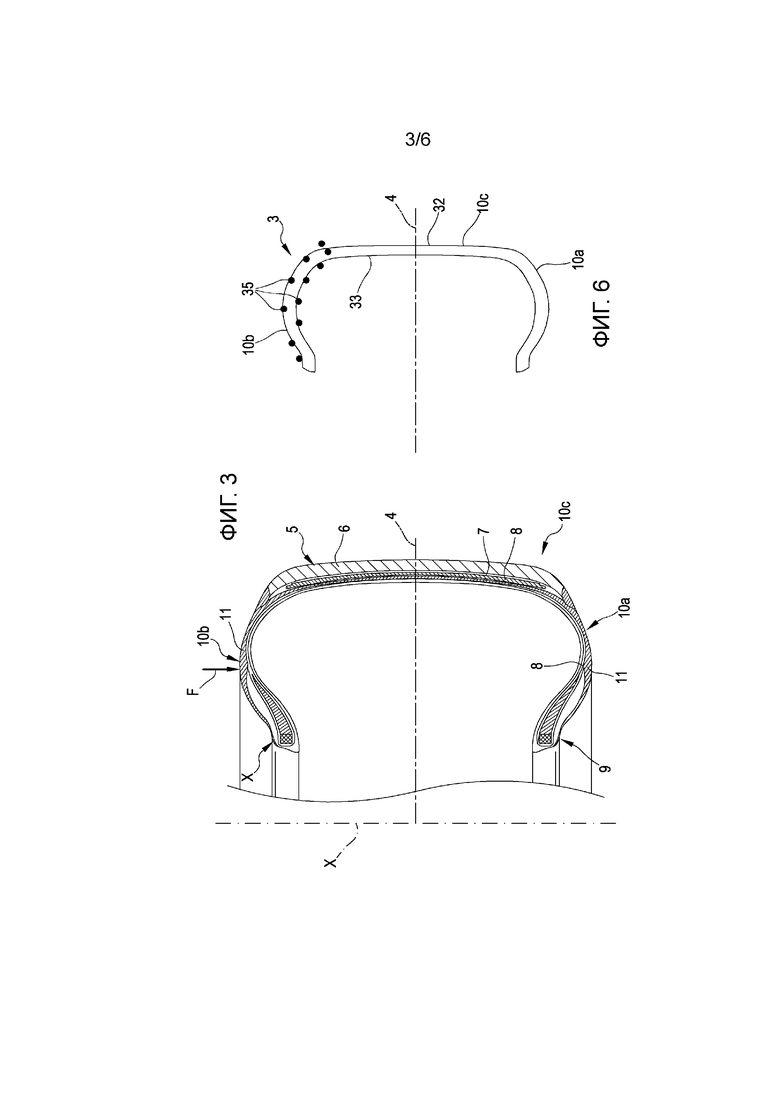
Фиг. 3 - схематический вид в сечении шины, расположенной в устройстве по настоящему изобретению.
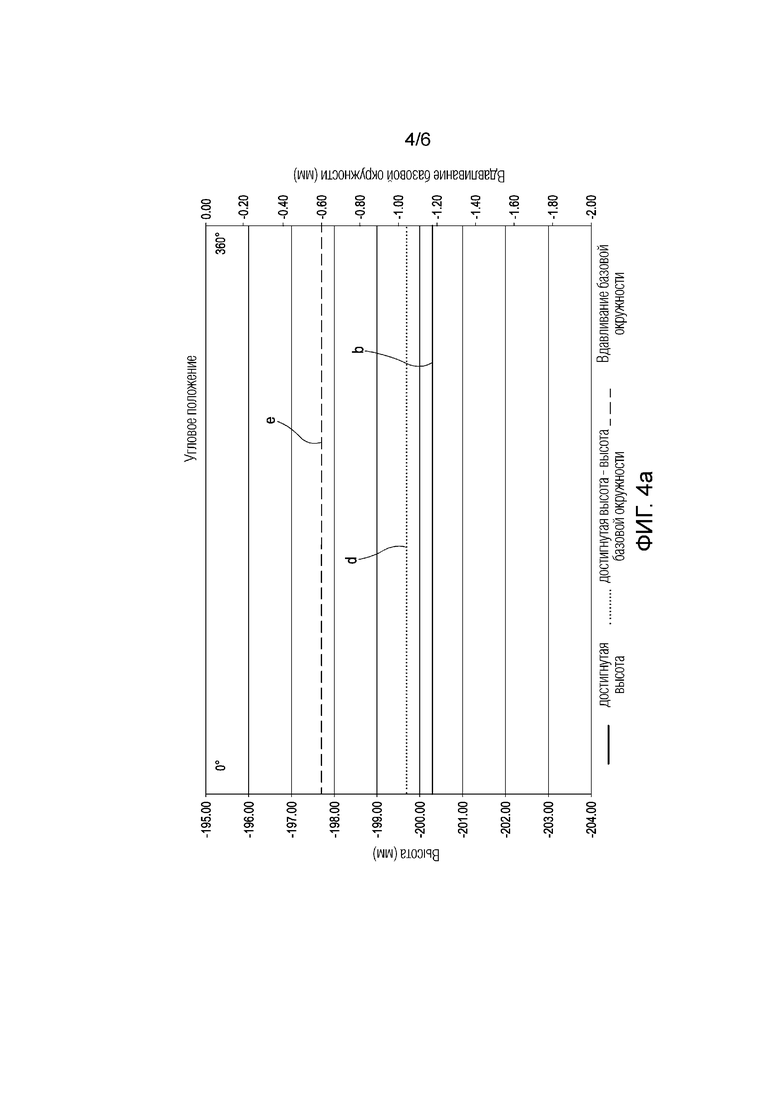
Фиг. 4a - график, на котором ось абсцисс показывает угловое положение множества измеряемых поверхностей шины, не имеющей дефектов, а ось ординат показывает величину выходной точки отсчета, соответствующую свободной части шины после установления по существу постоянной высоты, а также величину высоты базовой окружности и величину вдавленности базовой окружности; при этом измерения выполняются для стороны A шины.
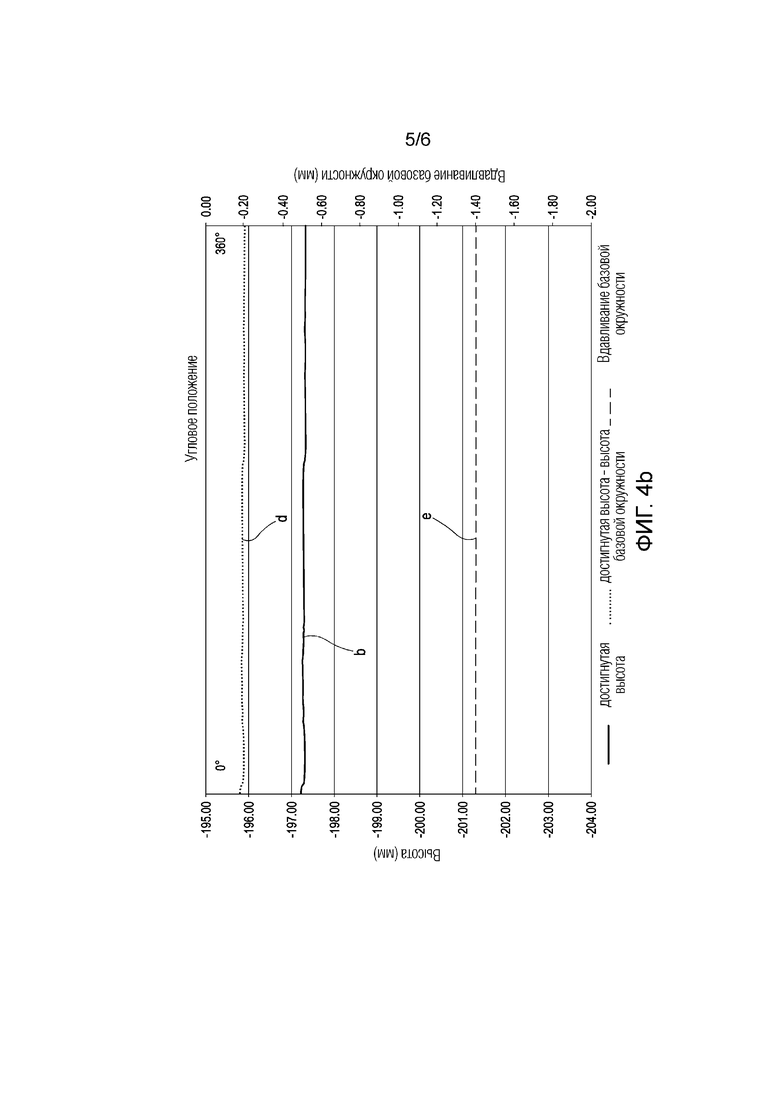
Фиг. 4b - график, на котором ось абсцисс показывает угловое положение множества измеряемых поверхностей шины, с дефектом слабой боковины, а ось ординат показывает величину выходной точки отсчета, соответствующую свободной части шины после установления по существу постоянной силы, а также величину высоты базовой окружности и величину вдавленности базовой окружности; при этом измерения выполняются для стороны A шины.
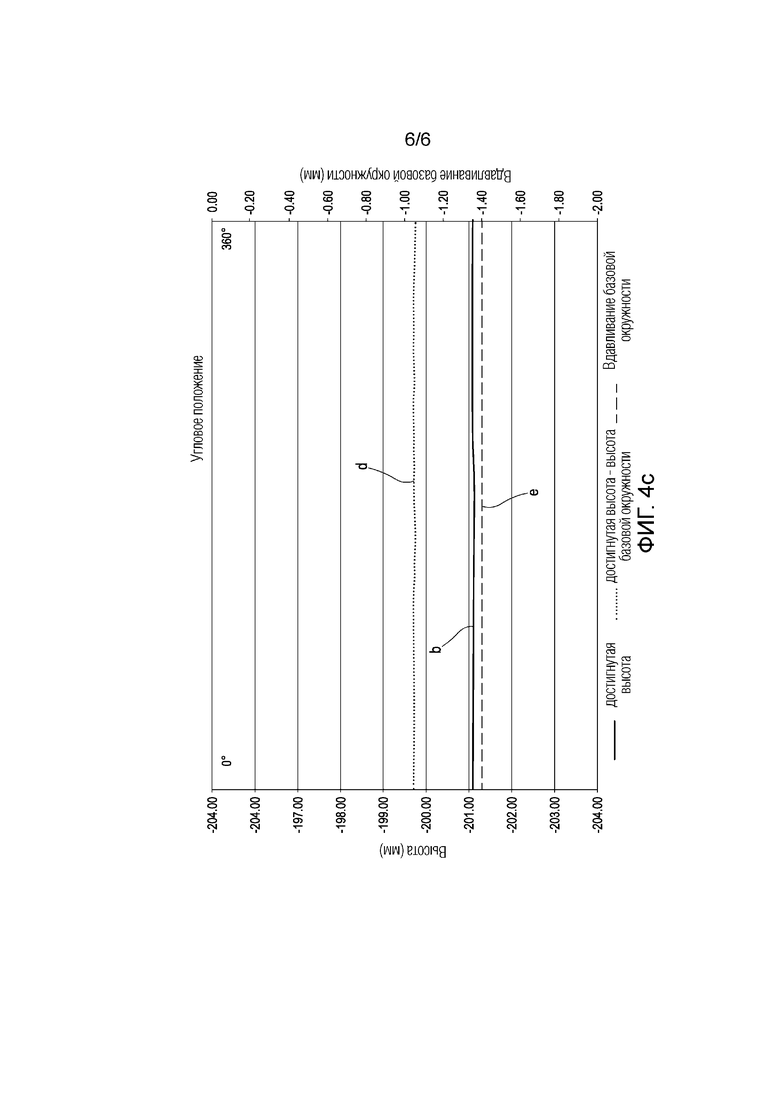
Фиг. 4с - график, на котором ось абсцисс показывает угловое положение множества измеряемых поверхностей шины, с другим дефектом слабой боковины, а ось ординат показывает величину выходной точки отсчета, соответствующую свободной части шины после установления по существу постоянной высоты, а также величину высоты базовой окружности и величину вдавленности базовой окружности; при этом измерения выполняются для стороны A шины.
Фиг. 5 - схематический вид сверху шины на этапе способа по настоящему изобретению.
Фиг. 6 - схематический вид сбоку в сечении шины по фиг. 5 на следующем этапе способа по настоящему изобретению.
На приложенных чертежах и, в частности на фиг. 1-3, позицией 1 в целом обозначено устройство для проверки шин по настоящему изобретению.
Позиция 2 обозначает опорную плоскость, предпочтительно, горизонтальную, выполненную с возможностью принимать шину 3, уложенную так, чтобы осевая средняя плоскость 4 была по существу параллельна опорной плоскости.
Шина 3, имеющая ось Х вращения, содержит (см., в частности, фиг. 3) корону 10с, расположенную по существу перпендикулярно осевой средней плоскости 4, расположенную в радиально внешней области шины. Такая корона 10с содержит беговой пояс 6, структуру 7 брекера, и части структуры 8 каркаса, расположенные радиально внутри относительно бегового пояса 6.
Шина 3 также содержит два борта 9, расположенных радиально внутри и соответственно на противоположных сторонах от осевой средней плоскости 4. Борта 9 выполнены с возможностью зацепления с ободом колеса.
Шина 3 также содержит две боковины 10а и 10b, которые соответственно проходят с аксиально противоположных сторон от осевой средней плоскости 4 между каждым из бортов 9 и короной 10с. Каждая боковина соответствует боковой стенке 11 и частям структуры 8 каркаса, расположенным аксиально внутри относительно боковой стенки 11.
Когда шина 3 лежит на опорной плоскости 2, одна из двух боковин шины, например, боковина 10а, находится в непосредственном контакте с этой опорной плоскостью 2, определяя опорную боковину 10а. Другая из двух боковин, на чертежах боковина 10b, находится на некоторой высоте над опорной плоскостью, определяя свободную боковину 10b.
Опорная плоскость 2 находится внутри рамы 13, схематически и частично видимой на фиг. 1, относительно которой она может вращаться вокруг оси, совпадающей с осью Х вращения лежащей на ней шины. Устройство 1 также содержит устройства для приведения опорной плоскости 2 во вращение относительно рамы 13, которые не показаны.
Устройство 1 для проверки шин содержит, в дополнение к раме 13 и опорной плоскости 2, инструмент 23, приводимый в движение позиционирующим приводом 23a, выполненным с возможностью опираться и толкать, деформируя, часть шины 3 и, в частности, опираться и толкать часть свободной боковины 10b.
Предпочтительно, инструмент 23 содержит ролик 25, с предпочтительно горизонтальной осью вращения и, при использовании, ориентированной по существу в радиальном направлении шины, лежащей на опорной плоскости 2 (см., напр., конфигурацию, представленную на фиг. 2).
Инструмент 23 выполнен с возможностью с помощью позиционирующего привода 23a прижиматься к свободной боковине 10b в направлении толкания для приложения силы F к измеряемой поверхности M на свободной боковине шины. Сила F, прилагаемая инструментом 23, именуется силой инструмента. Предпочтительно направление толкания содержит компонент, направленный вдоль вертикальной оси, например, параллельно оси Z, как показано на фиг. 2. Такая ось далее именуется "направление подхода". Позиционирующий привод 23a предпочтительно содержит линейный электродвигатель (не показан).
Устройство 1 также содержит узел 180, в котором запоминается трехмерный профиль по меньшей мере одной части шины 3, например, в подходящем невидимом запоминающем устройстве. Как показано на фиг. 5 и 6, такая часть содержит по меньшей мере одну кольцевидную поверхность 31, имеющую, по существу, форму секции тора, более подробно описанную ниже.
Как можно видеть на схематическом представлении на фиг. 5, шина 3 ограничена внешней поверхностью 32 и внутренней поверхностью 33, которая образует в каждом сечении шины периметрическую кромку. Инструмент 23 и, в частности, ролик 25 выполнен с возможностью входить в контакт с частью внешней поверхностью 32 свободной боковины 10, именуемой, как указано выше, измеряемой поверхностью M. Кроме того, поскольку предпочтительно во время измерения шину проводят во вращение относительно инструмента 23, как подробно описано ниже, кольцевидная поверхность внешней поверхности свободной боковины 10b контактирует с роликом 25.
Следовательно, для того чтобы ролик 25 касался шины на ее поверхности, трехмерный профиль которой был получен ранее, такой профиль должен содержать по меньшей мере кольцевидную поверхность 31.
Предпочтительно, блок 180 управления также выполнен с возможностью управлять движением инструмента 23 к шине 3 и от нее, а также регулировать силе F инструмента, которую следует приложить к поверхности шины 3. Сила F инструмента, которую следует приложить, зависит, предпочтительно, от типа и/или модели шины. Поэтому, например, в том же запоминающем устройстве, в котором хранится трехмерный профиль шины, также сохранена база данных, в которой каждый тип и/или модель шины связаны с величиной прилагаемой силы F инструмента.
Трехмерный профиль, хранящийся в запоминающем устройстве блока 180 управления, содержит, например, множество сечений, таких, как показано на фиг. 6, которые могут состоять из непрерывных линий или множества отдельных точек, например, обозначенных позицией 35, огибающая которых описывает кольцевидную поверхность 32. Предпочтительно, в запоминающей устройстве блока 180 управления присутствует трехмерный профиль всей внутренней поверхности 33 и всей внешней поверхности 32.
Устройство 1 также содержит первый датчик 200 высоты, например, двухмерную или трехмерную видеокамеру, установленную так, чтобы визуализировать участок короны 10c шины. На фиг. 1 и 2 первый датчик 200 высоты расположен напротив внешней поверхности 32 шины 3 у бегового пояса 6.
Базовая окружность 201, упрощенно показанная на фиг. 2 двумя крестами, идентифицирована на участке внешней поверхности бегового пояса, который визуализируется первым датчиком 200 высоты во время вращения шины. Базовая поверхность указывает на наличие множества базовых точек, все из которых находятся на одной высоте покоя над опорной плоскостью 2, которое можно идентифицировать как "базу" на внешней поверхности бегового пояса 6 с помощью первого датчика 300 высоты.
Кроме того, устройство 1 содержит второй датчик 202 высоты и первый датчик 203 силы, схематически показанные на фиг. 2, которые могут быть частью, как показано, либо инструмента 23, либо позиционирующего привода 23a, например, частью линейного электродвигателя, который автоматически измеряет силу инструмента, прилагаемую к измеряемой поверхности M, и высоту, на которую приходит измеряемая поверхность M, когда инструмент 23 сжимает саму измеряемую поверхность, когда инструмент касается боковины 10b шины. Альтернативно, второй датчик высоты и первый датчик силы могут находиться вне инструмента 23 (предпочтительный вариант, не показан). Например, для измерения высоты свободной боковины 10 устройство 1 может содержать преобразователь линейного положения (не показан), способный определять положение инструмента 23.
При использовании шину 3 укладывают на опорную плоскость 2 так, чтобы осевая средняя плоскость 4 была по существу параллельна самой опорной плоскости, чтобы определить опорную боковину 10a и свободную боковину 10b.
Поскольку трехмерный профиль шины 3 известен, известны ее пространственное положение и, следовательно, положение относительно опорной плоскости 2. Другими словами, высота, на которой расположены измеряемые поверхности M в положении покоя перед сжатием и деформированием инструментом 23, известна.
Для приложения силы F инструмента, направленной к опорной плоскости 2, к измеряемой поверхности свободной боковины 10b, являющейся частью кольцевидной поверхности 31, инструмент 23 позиционируют относительно свободной боковины 10b, подводя его вертикально к измеряемой поверхности. Это позиционирование не требует определения положения "верхней кромки" шины, поскольку это положение предпочтительно известно из трехмерного профиля. Затем активируют подход к свободной боковине 10b, в результате чего инструмент 23 позиционирующим приводом 23а подводится к шине 3. Это движение происходит за счет движения линейного электродвигателя (не показан). Наконец, активируют толкающий ход инструмента 23, упирающегося в свободную боковину 10b.
Более подробно, сила F инструмента имеет по меньшей мере один компонент, направленный параллельно оси X вращения шины.
Движение инструмента 23 может происходить, например, первым радиальным линейным перемещением и вторым линейным перемещением вдоль оси Z по направлению к шине.
Начальное радиально линейное перемещение инструмента 23 выполняется на основе размера шины, пока инструмент 23 не будет позиционирован относительно свободной боковины 10b на вертикали к выбранной измеряемой поверхностью. Другими словами, это линейное перемещение выполняется, пока не будет достигнуто радиальное положение, соответствующее желаемой измеряемой поверхности. Измеряемая поверхность M, например, расположена на участке свободной боковины 10b шины, расположенной на большей высоте относительно опорной плоскости 2 перед приложением силы F. Предпочтительно, измеряемая поверхность расположена в аксиально внешней области свободной боковины 10b шины.
Когда будет достигнуто желаемое радиальное положение, активируется подход позиционирующего привода 23a к свободной боковине 10b шины, в результате чего инструмент 23 подводится к шине 3 вдоль оси Z.
Подход блокируется, когда будет достигнута внешняя поверхность 32 шины 3, высота покоя которой известна из трехмерного профиля шины.
Высота покоя базовой окружности 201, если она еще не известна, также измеряется первым датчиком 200 высоты.
Таким образом, инструмент 23 вводят в контакт со свободной боковиной 10b, высота которой известна. Позиционирующий привод 32a создает требуемое осевое давление для активации толкающего хода инструмента 23, упирающегося в свободную боковину 10b, и прилагающего силу F. Величина силы F определяется, например, извлечением этой величины из базы данных, имеющейся в блоке 180 управления. Величина F зависит от типа и/или модели шины, уложенной на опорную плоскость 2. Однако можно предусмотреть и ручной ввод величины силы F или изменение заранее заданной величины силы F. Измеряемая поверхность M соответствует поверхности свободной боковины 10, контактирующей с инструментом 23.
Во время приложения силы шина может быть накачена или не накачана.
Возможны два типа измерений: в первом предпочтительном примере заданную силу F во время измерений поддерживают постоянной. Альтернативно, инструмент 23 подводят на высоту, которую во время измерений поддерживают постоянной. Другими словами, измеряемую поверхность M деформируют, пока она не достигнет заданной высоты, именуемой высотой инструмента. Заданная инструментальная высота, например, рассчитывается как:
Инструментальная высота=Высота покоя - D
где D - заданная постоянная.
D (которую можно приравнять к вдавливанию), например, составляет от 5 до 30 мм.
Опорную плоскость 2 приводят во вращение вокруг оси Х вращения шины 3, поддерживая контакт инструмента 23 со свободной боковиной 10b проверяемой шины. Инструмент 23 поддерживает постоянной либо силу F, либо инструментальную высоту, и во время такого вращения ролик 25 катится по свободной боковине 10b. Предпочтительно, постоянная сила или постоянная инструментальная высота удерживаются на протяжении по меньшей мере одного полного оборота на 360°.
Величина силы F инструмента или инструментальной высоты предпочтительно удерживается по существу постоянной на протяжении по меньшей мере одного полного оборота шины 3 вокруг оси вращения так, что измеряемые поверхности, сгруппированные друг с другом, образуют по существу кольцевидную поверхность 31. Например, величина приложенной силы инструмента может быть от 10 Н до 150 Н. Диапазон инструментальных высот может составлять, например, прибл. 200 мм.
Следовательно, во время прижимания по существу с постоянной силой или на по существу постоянной инструментальной высоте во время относительного вращения на 360° инструмента и шины, определяют высоту/силу деформированной части поверхности. Эта высота/сила измеряется либо непрерывно (напр., получая непрерывную линию высот/сил), либо с интервалами, предпочтительно, регулярными, например, через каждые 0,1 радиан, или, эквивалентно, каждые 0,2 секунды, учитывая по существу постоянную частоту вращения шины.
В другом предпочтительном примере можно перейти от конфигурации, в котором во время вращения задается постоянная инструментальная высота, к конфигурации с постоянной силой инструмента. Для того для каждого типа шин задается максимальная сила Fmax инструмента, которую может выдержать шина 3 без возникновения необратимых деформаций или повреждений. В случае, когда задана постоянная высота, если для достижения такой высоты сила инструмента должна превысить Fmax или быть равной ей прежде, чем будет достигнута заданная высота, инструмент прекращает движение по оси Z и не достигает желаемой инструментальной высоты. Измерение продолжается с постоянной силой инструмента во время вращения, равной максимальной силе инструмента.
Предпочтительно, чтобы измеряемая поверхность M находилась на по существу постоянном расстоянии от оси вращения. Тогда ролик 25 контактирует с множеством измеряемых поверхностей M все из которых являются частью кольцевидной поверхности 31. Таким образом определено множество измерительных поверхностей M разнесенных друг от друга по углу, как показано на Фиг. 5, где каждая измеряемая поверхность M обозначена прямоугольником.
Согласно одному возможному варианту, в случае, когда сила F инструмента поддерживается во время вращения по существу постоянной, инструментальная высота свободной боковины 10b шины 3 определяется вторым датчиком 202 высоты в каждом положении, занятом роликом на отдельной измеряемой поверхности M.
Аналогично, в случае, когда во время вращения по существу постоянной поддерживают инструментальную высоту, силу инструмента, прилагаемую инструментом к свободной боковине 10b шины 3, измеряют первым датчиком 203 силы в каждом положении, принимаемом роликом на отдельной измеряемой поверхности M.
При обороте по меньшей мере на 360°, во время приложения силы к измеряемой поверхности M, и при постоянной силе инструмента, и при постоянной инструментальной высоте, высоту базовой окружности 201 измеряют первым датчиком 200 высоты. Сжатие и деформация свободной боковины 10b соответствует деформации опорной боковины 10a и, следовательно, линейному перемещению по оси Z базовой окружности 201, которая до деформации находилась на высоте покоя.
Окружность 201, таким образом, переходит на другую высоту, которая может быть одинаковой на протяжении всего оборота, или меняться в зависимости от углового положения шины. Измерение высоты базовой окружности 201 всегда осуществляется первым датчиком 200 высоты. Например, датчик 200, содержащий двухмерную или трехмерную видеокамеру, во время вращения шины получает множество изображений, разнесенных друг от друга по углу. Изображения сравнивают с соответствующими изображениями, полученными, когда деформации не было, и, соответственно вычисляют разницу по высоте, которая определена как:
разница по высоте=высота покоя окружности - разница по высоте при деформации.
Точнее, сравнительные изображения той же шины в отсутствии деформации могут иметься в базе данных или получаться (и храниться в соответствующем запоминающем устройстве) при полном обороте, предшествующем обороту, в ходе которого к измеряемым поверхностям M прилагается сила.
Преимущественно, блок 180 управления устройством 1 запрограммирован на измерение величины инструментальной высоты в каждом положении ролика 25 на соответствующей измеряемой поверхности, когда величина силы F всегда по существу постоянна. Аналогично, блок 180 управления устройством 1 запрограммирован на измерение силы в каждом положении ролика 25 на соответствующей измеряемой поверхности, когда величина инструментальной высоты всегда по существу постоянна. Кроме того, в обоих случаях блок управления запрограммирован на измерение величины высоты базовой окружности во время приложения силы инструмента/инструментальной высоты.
В одном примере высота базовой окружности 201 во время сжатия определяет, следует ли отбраковать шину или нет. Фактически, если, например, постоянная инструментальная высота фиксирована, с учетом постоянной величины инструментальной высоты и измеренной величины высоты базовой окружности, то можно рассчитать отношение между высотой инструмента и вдавленностью базовой окружности. С помощью этого отношения можно установить, например, что имеется состояние слабой боковины. Кроме того, можно определить, на какой боковине имеется дефект, т.е., на свободной боковине 10b или на опорной боковине 10a.
Более предпочтительно, величину высоты этой окружности во время деформации используют вместе с другими измеренными параметрами, такими как инструментальная высота или сила инструмента, для ограничения количества измерений, необходимых для выявления дефектов или для определения наличия дефекта в неопределенных случаях.
Согласно настоящему изобретению, инструментальная высота и сила инструмента измеряют на трех шинах с одной стороны (сторона А). Кроме того, измеряют вдавленность базовой окружности 201. Эти измерения показаны на графиках на фиг. 4a-4c.
На фиг. 4a представлены измерения шины, не имеющей дефектов. Показана кривая b, относящаяся к инструментальной высоте, фактически достигла удерживаемой постоянной во время вращения. Кроме того, кривая d показывает разность.
Достигнутая инструментальная высота - высота базовой окружности во время сжатия
Для кривых b и d репрезентативная ось ординат находится слева. Таким образом рассчитывается разница между высотой базовой окружности 201 в состоянии покоя и этой высотой при деформации (кривая e), репрезентативная ось ординат для которой находится справа. Величина этой разницы и/или ее соотношение с вдавливанием измеряемой поверхности M определяет наличие или отсутствие дефектов. В этом случае вдавливание базовой окружности считается "нормальным", что, в комбинации с тем фактом, инструментальная высота достигнута с величинами силы, также находящимися в допустимом диапазоне (благодаря измерению параметров силы инструмента и инструментальной высоты), показывает, что проверяемая шина не имеет дефектов боковин. Измерения высоты базовой окружности позволяют не выполнять переворот шины и не измерять сторону B.
Данные по измерениям, выполняемым на стороне А, приведены ниже:
СТОРОНА А
НУЛЕВАЯ ВЕЛИЧИНА ШИНЫ (НАПР., ИЗ БАЗЫ ДАННЫХ): -188,70 мм
ЖЕЛАЕМАЯ ВЫСОТА БОКОВИНЫ: -202 мм
ДОСТИГНУТАЯ ВЫСОТА БОКОВИНЫ (кривая b на фиг. 4a): -200,3 мм
ВДАВЛИВАНИЕ (ДОСТИГНУТАЯ ВЫСОТА-НУЛЕВАЯ ВЫСОТА): -11,60 мм
ВДАВЛИВАНИЕ БАЗОВОЙ ПОВЕРХНОСТИ НА ПРОТЕКТОРЕ (кривая e на фиг. 4a): -0,6 мм
Из вышеприведенных измерений (фиг. 4a) можно определить, что вдавливание базовой окружности является приемлемым для шины без дефектов в боковине.
На фиг. 4b представлены измерения шины со слабой боковиной. Показана кривая b, относящаяся к фактически достигнутой инструментальной высоте удерживаемой постоянной во время вращения. Кривая d представляет разность.
Достигнутая инструментальная высота - высота базовой окружности во время сжатия
Для кривых b и d репрезентативная ось ординат находится слева. Таким образом рассчитывается разница между высотой базовой окружности 201 в состоянии покоя и этой высотой при деформации (кривая e), репрезентативная ось ординат для которой находится справа. Величина этой разницы и/или ее соотношение с вдавливанием измеряемой поверхности M определяет наличие или отсутствие дефектов. В этом случае вдавливание базовой окружности считается "больше нормального", что значит, что боковина, лежащая на плоскости, т.е., боковина, соответствующая стороне B, существенно прогибается. Однако, боковина, соответствующая стороне А легко не прогибается, поскольку требуемая высота не достигнута при максимальной приложенной силе. Это приводит к выводу, что боковина, соответствующая стороне В, является слабой.
Данные по измерениям, выполняемым на стороне А, приведены ниже:
СТОРОНА А
НУЛЕВАЯ ВЕЛИЧИНА ШИНЫ (НАПР., ИЗ БАЗЫ ДАННЫХ): -185,60 мм
ЖЕЛАЕМАЯ ВЫСОТА БОКОВИНЫ: -202 мм
ДОСТИГНУТАЯ ВЫСОТА БОКОВИНЫ (кривая b на фиг. 4b): -197,3 мм
ВДАВЛИВАНИЕ (ДОСТИГНУТАЯ ВЫСОТА-НУЛЕВАЯ ВЫСОТА): -11,70 мм
ВДАВЛИВАНИЕ БАЗОВОЙ ПОВЕРХНОСТИ НА ПРОТЕКТОРЕ (кривая e на фиг. 4b): -1,4 мм
На фиг. 4c представлены результаты измерений шины с двумя слабыми боковинами. Показана кривая b, относящаяся к инструментальной высоте (достигнутой фактически) удерживаемой постоянной во время вращения. Кривая d представляет разность
Достигнутая инструментальная высота - высота базовой окружности во время сжатия
Для кривых b и d репрезентативная ось ординат находится слева. Рассчитывается разница между высотой базовой окружности 201 в состоянии покоя и этой высотой при деформации (кривая e), репрезентативная ось ординат для которой находится справа. Величина этой разницы и/или ее соотношение с вдавливанием измеряемой поверхности M определяет наличие или отсутствие дефектов. В этом случае вдавливание базовой окружности считается "больше нормального", что значит, что боковина, лежащая на плоскости, т.е., боковина, соответствующая стороне B, существенно прогибается. Однако, боковина, соответствующая стороне А, также легко прогибается, поскольку требуемая высота достигнута при относительно небольшой приложенной силе. Это приводит к выводу, что обе боковины слабее нормы т.е. обе боковины являются слабыми.
Данные по измерениям, выполняемым на стороне А, приведены ниже:
СТОРОНА А
НУЛЕВАЯ ВЕЛИЧИНА ШИНЫ (НАПР., ИЗ БАЗЫ ДАННЫХ): -187,10 мм
ЖЕЛАЕМАЯ ВЫСОТА БОКОВИНЫ: -202 мм
ДОСТИГНУТАЯ ВЫСОТА БОКОВИНЫ (кривая b на фиг. 4с): -201 мм
ВДАВЛИВАНИЕ (ДОСТИГНУТАЯ ВЫСОТА-НУЛЕВАЯ ВЫСОТА): -13,90 мм
ВДАВЛИВАНИЕ БАЗОВОЙ ПОВЕРХНОСТИ НА ПРОТЕКТОРЕ (кривая e на фиг. 4с): -1,4 мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТАНОВКА ДЛЯ КОНТРОЛЯ ШИН | 2017 |
|
RU2733305C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ КОНТРОЛЯ ШИН | 2017 |
|
RU2766025C2 |
| СПОСОБ КОНТРОЛЯ ШИН | 2017 |
|
RU2743772C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН НА ЛИНИИ ДЛЯ ПРОИЗВОДСТВА ШИН | 2014 |
|
RU2657637C2 |
| УСТАНОВКА И СПОСОБ КОНТРОЛЯ ШИН | 2016 |
|
RU2722984C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ КОНТРОЛЯ ШИН | 2016 |
|
RU2733978C2 |
| БЕСКАМЕРНАЯ ШИНА, ИМЕЮЩАЯ ГЕРМЕТИЗИРУЮЩИЙ СЛОЙ С ЩЕЛЬЮ, И СПОСОБ ЕЕ ПРОИЗВОДСТВА | 2009 |
|
RU2497687C2 |
| СПОСОБ УПРАВЛЕНИЯ СБОРКОЙ УСИЛИТЕЛЬНОГО КОНСТРУКТИВНОГО ЭЛЕМЕНТА ДЛЯ ШИН, СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ШИН | 2013 |
|
RU2632458C2 |
| СПОСОБ И СТАНЦИЯ КОНТРОЛЯ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2737564C2 |
| ШИНА ДЛЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2222437C2 |
Изобретение относится к автомобильной промышленности. Способ проверки шины включает в себя следующее: укладывают шину, имеющую ось вращения, на опорную плоскость, определяя опорную боковину, свободную боковину, расположенную на некоторой высоте над опорной плоскостью, и корону, расположенную между свободной боковиной и опорной боковиной; выбирают базовую окружность шины, находящуюся на короне; подводят инструмент к шине, уложенной на опорную плоскость так, чтобы он лежал на измеряемой поверхности, при этом измеряемая поверхность является частью внешней поверхности свободной боковины; толкают инструмент в измеряемую поверхность так, чтобы приложить силу, направленную к опорной плоскости, к измеряемой поверхности, создавая деформированную измеряемую поверхность, расположенную на инструментальной высоте. Во время толкания приводят шину во вращение относительно инструмента для по меньшей мере одного полного оборота вокруг оси вращения. Затем измеряют высоту базовой окружности во время этого полного оборота и определяют наличие дефекта в шине на основе измеренной высоты базовой окружности. Также раскрыто устройство для проверки шин. Технический результат – повышение скорости и качества проверки шин. 2 н. и 24 з.п. ф-лы, 6 ил.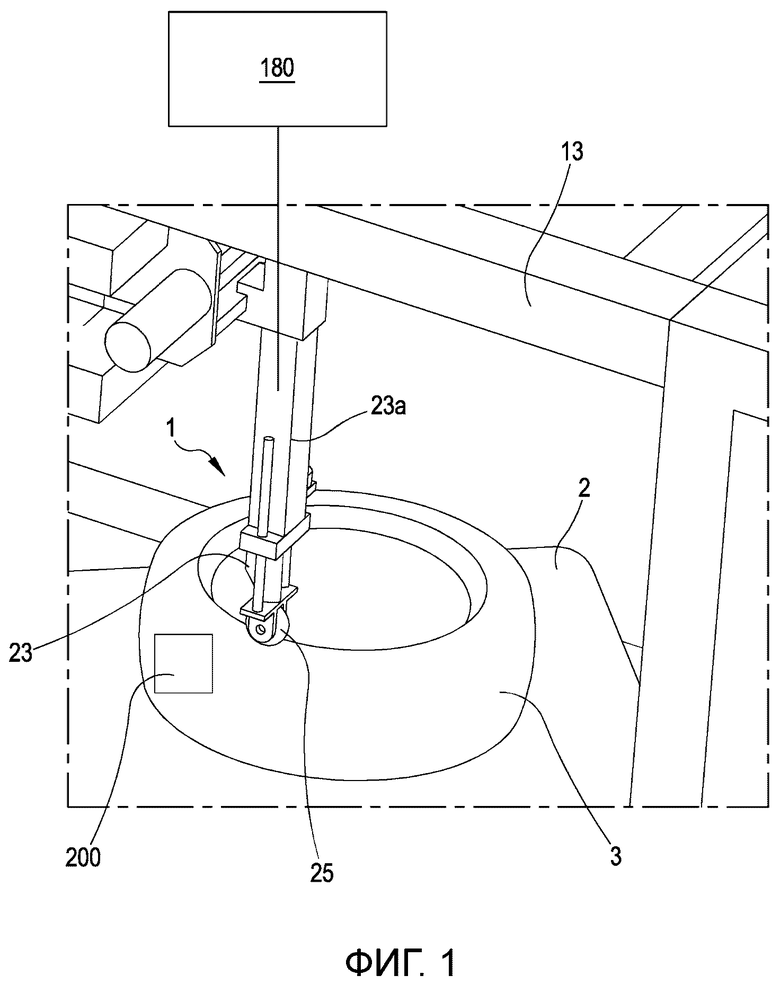
1. Способ проверки шин, при котором:
- укладывают шину (3), имеющую ось (Х) вращения, на опорную плоскость (2), определяя опорную боковину (10a), свободную боковину (10b), расположенную на некоторой высоте над опорной плоскостью (2), и корону (10c), расположенную между свободной боковиной (10b) и опорной боковиной (10a);
- выбирают базовую окружность (201) шины, находящуюся на короне (10с);
- подводят инструмент (23) к шине, уложенной на опорную плоскость (2), таким образом, чтобы он лежал на измеряемой поверхности (M), при этом измеряемая поверхность (M) является частью внешней поверхности (32) свободной боковины (10b);
- толкают инструмент (23) в измеряемую поверхность (M) таким образом, чтобы приложить силу (F), направленную к опорной плоскости (2), к измеряемой поверхности (M), создавая деформированную измеряемую поверхность, расположенную на инструментальной высоте;
- во время толкания приводят шину (3) во вращение относительно инструмента (3) для по меньшей мере одного полного оборота вокруг оси (Х) вращения;
- измеряют высоту базовой окружности (201) во время этого полного оборота; и
- определяют наличие дефекта в шине (3) на основе измеренной высоты базовой окружности (201).
2. Способ по п. 1, при котором:
- измеряют инструментальную высоту измеряемой поверхности (M) на протяжении полного оборота и/или измеряют силу (F) инструмента, прилагаемого инструментом (23) к измеряемой поверхности (M) на протяжении полного оборота;
при этом способ дополнительно включает определение того, имеет ли шина (3) дефект на основе измеренной инструментальной высоты и/или на основе измеренной силы (F) инструмента.
3. Способ по п. 2, при котором:
- удерживают силу (F), прилагаемую на протяжении по меньшей мере одного полного оборота вокруг оси (Х) вращения по существу постоянной;
- измеряют инструментальную высоту измеряемой поверхности (M) во множестве относительных угловых положений между шиной (3) и инструментом (23) на протяжении полного оборота,
при этом при определении наличия дефекта в шине (3) на основе высоты базовой окружности (201) и на основе инструментальной высоты измеряемой поверхности (M) классифицируют шину как содержащую дефект, если по меньшей мере одна инструментальная высота на протяжении полного оборота находится за пределами заданного диапазона величин высоты.
4. Способ по п. 2, при котором:
- удерживают инструментальную высоту по существу постоянной на протяжении по меньшей мере одного полного оборота шины вокруг оси (Х) вращения;
- измеряют силу (F), прилагаемую инструментом (23) к измеряемой поверхности во множестве относительных угловых положений между шиной и инструментом на протяжении полного оборота;
при этом при определении наличия дефекта на основе высоты базовой окружности (201) и на основе силы (F) инструмента классифицируют шину как содержащую дефект, если по меньшей мере одна величина измеренной силы (F) инструмента, приложенной к по меньшей мере одной измеряемой поверхности на протяжении полного оборота, находится за пределами заданного диапазона величин силы.
5. Способ по п. 1 или 2, при котором:
- удерживают силу (F) инструмента на протяжении по меньшей мере одного полного оборота шины вокруг оси (Х) вращения по существу постоянной.
6. Способ по п. 1 или 2, при котором:
- удерживают инструментальную высоту по существу постоянной на протяжении по меньшей мере одного полного оборота шины вокруг оси (Х) вращения.
7. Способ по любому из предшествующих пунктов, при котором:
- задают требуемую величину инструментальной высоты, до которой нужно привести деформированную поверхность;
- задают максимальную величину силы инструмента (Fmax);
- толкают измеряемую поверхность инструментом так, чтобы измеряемая поверхность (M) достигла требуемой инструментальной высоты;
- измеряют силу инструмента во время толкания;
- блокируют толкание, если сила инструмента достигает максимальной величины и/или превышает ее; и
- удерживают эту максимальную силу инструмента на протяжении по меньшей мере одного полного оборота шины вокруг оси (Х) вращения.
8. Способ по любому из предшествующих пунктов, при котором:
- создают базу данных, содержащую информацию о множестве моделей шин, при этом каждая модель шины из этого множества ассоциирована с высотой покоя свободной боковины (10b);
- определяют модель шины, уложенной на опорную плоскость (2);
- извлекают из базы данных величину высоты покоя, связанную с определенной моделью шины;
- толкают измеряемую поверхность (M) инструментом с высоты покоя, извлеченной из базы данных, до инструментальной высоты, или толкают измеряемую поверхность инструментом с высоты покоя, извлеченной из базы данных, с силой инструмента.
9. Способ по любому из предшествующих пунктов, при котором при укладке шины (3), имеющей ось (Х) вращения, на опорную плоскость (2) укладывают шину (3) на опорную плоскость таким образом, чтобы осевая средняя плоскость (4) была по существу параллельна опорной плоскости (2).
10. Способ по любому из предшествующих пунктов, при котором шина (3) имеет беговой пояс (6), причем при выборе базовой окружности (201) выбирают базовую окружность на беговом поясе (6).
11. Способ по любому из предшествующих пунктов, при котором при определении наличия дефекта в шине (3) на основании высоты базовой окружности (201) определяют, имеет ли шина (3) дефект на опорной боковине (10a) или на свободной боковине (10b) на основе высоты базовой окружности.
12. Способ по любому из предшествующих пунктов, при котором:
- получают высоту покоя базовой окружности (201);
- определяют разницу между этой высотой покоя и инструментальной высотой на протяжении полного оборота шины; и
- определяют наличие дефекта в шине (3) на опорной боковине или на свободной боковине на основе этой разницы.
13. Способ по п. 12, при котором при определении наличия дефекта на опорной боковине (10a) или на свободной боковине (10b) на основе этой разницы определяют, превышает эта разница первую пороговую величину или меньше второй пороговой величины.
14. Способ по любому из предшествующих пунктов, при котором:
- получают изображение части базовой окружности во время вращения.
15. Способ по пп. 12 и 14, при котором:
- получают первое изображение части базовой окружности в состоянии покоя;
- получают второе изображение части базовой окружности во время вращения в том же угловом положении, в котором было получено первое изображение;
- определяют разницу, сравнивая первое и второе изображения.
16. Устройство (1) для проверки шин (3), содержащее:
опорную плоскость (2), на которую укладывают шину (3), при этом шина таким образом определяет опорную боковину (10a), свободную боковину (10b), расположенную на некоторой высоте над опорной плоскостью (2), и корону (10с), расположенную между свободной боковиной (10b) и опорной боковиной (10а);
инструмент (23), выполненный с возможностью приложения силы (F), направленной к опорной плоскости (2), к измеряемой поверхности (M) свободной боковины (10b) шины (3) таким образом, чтобы привести ее на инструментальную высоту;
позиционирующий привод (23а), функционально связанный с инструментом (23) и выполненный с возможностью перемещения инструмента к шине (3);
вращающее устройство для изменения углового положения измеряемой поверхности относительно инструмента (23);
первый датчик (200) высоты, выполненный с возможностью измерения высоты базовой окружности (201), идентифицированной в короне (10с) шины;
блок (108) управления, запрограммированный на:
- отправку команд на позиционирующий привод (23а) для подвода инструмента (23) к шине, уложенной на опорную поверхность таким образом, чтобы инструмент лежал на измеряемой поверхности, и толкания измеряемой поверхности (M) инструментом (23) для приложения силы инструмента к измеряемой поверхности в направлении опорной плоскости (2);
- во время толкания отправку команд на вращающее устройство для приведения шины (3) во вращение относительно инструмента (23);
- обработку сигнала, приходящего от первого датчика (200) высоты для измерения высоты базовой окружности во время вращения;
- обозначение шины (3) как имеющей дефект на основе измеренной высоты базовой окружности (201).
17. Устройство по п. 16, содержащее:
- второй датчик (202) высоты, выполненный с возможностью измерения высоты измеряемой поверхности (M) во множестве относительных угловых положений между шиной (3) и инструментом во время полного оборота, и/или
- датчик (203) силы, выполненный с возможностью измерения силы инструмента, прилагаемой инструментом (23) к измеряемой поверхности (M) во время полного оборота.
18. Устройство по п. 17, в котором блок (108) управления запрограммирован на:
- обработку сигнала, приходящего от второго датчика (202) высоты для определения инструментальной высоты во время вращения, и/или
- обработку сигнала, приходящего от датчика (203) силы для определения силы инструмента во время вращения, и
- обозначение шины (3) как имеющей дефект на основе высоты базовой окружности (201) и на основе инструментальной высоты измеряемой поверхности (M) и/или силы, прилагаемой инструментом.
19. Устройство по любому из пп. 16-18, в котором блок (180) управления выполнен с возможностью приведения в действие первого позиционирующего привода (23а) таким образом, чтобы инструмент (23) прилагал по существу постоянную силу к измеряемой поверхности (M) во время вращения или позиционировал измеряемую поверхность (M) на по существу постоянной инструментальной высоте над опорной плоскостью (2) во время вращения.
20. Устройство по любому из пп. 16-19, в котором первый датчик (200) высоты содержит видеокамеру.
21. Устройство по п. 20, в котором видеокамера является двухмерной видеокамерой.
22. Устройство по п. 20 или 21, в котором видеокамера выполнена с возможностью получения изображений базовой окружности (201) и отправки изображений в блок (180) управления.
23. Устройство по любому из пп. 16-22, в котором инструмент (23) содержит прижимающий ролик (25).
24. Устройство по п. 23, в котором прижимающий ролик (25) установлен с возможностью вращения вокруг собственной оси (24).
25. Устройство по любому из пп. 16-24, в котором позиционирующий привод (23а), функционально соединенный с инструментом (23), содержит линейный электродвигатель.
26. Устройство по п. 17, в котором позиционирующий привод (23а) содержит второй датчик (202) высоты и первый датчик (203) силы.
| WO 2015079370 A1, 04.06.2015 | |||
| WO 2017141094 A1, 24.08.2017 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ШИН В ПРОИЗВОДСТВЕННОЙ ЛИНИИ | 2013 |
|
RU2618571C2 |

