Изобретение относится к авиационной технике, в частности к грузовым управляемым парашютным системам и предназначено для доставки груза различных габаритов любого назначения полетной массой от 250 до 4000 кг по воздуху в заданную точку приземления из летательных аппаратов, оборудованных штатным транспортно-десантным оборудованием с высот до 8000 м над уровнем моря.
Известна система для сброса грузов из летательного аппарата [Пат. №2576364 РФ, МПК B64D 17/34. Система и способ сброса грузов из летательного аппарата / Болен Карстен (FR), Болен Холгер (DE); заявитель и патентообладатель Эйрбас Оперейшнс ГМБХ (DE), Эйрбас Сас (FR). - №2013117926/11; заявл. 10.11.2011; опубл. 27.02.2016, Бюл. №6], которая содержит грузовой парашют с канатом грузового парашюта и средства приведения в действие, предназначенные для введения грузового парашюта в окружающий воздушный поток позади летательного аппарата. Внутри летательного аппарата расположено приемное устройство, которое получает сигнал тягового усилия в канате грузового парашюта, причем указанное тяговое усилие измерено при помощи устройства измерения усилия и передано при помощи передающего устройства. Система парашютирования грузов содержит грузовой парашют с канатом грузового парашюта и первое устройство измерения усилия в канате. Воздушное судно содержит закрываемое отверстие и систему. Группа изобретений направлена на то, чтобы оценивать правильность раскрытия грузового парашюта в воздушном потоке вокруг летательного аппарата до аварийного разъединения каната парашюта.
Известна управляемая парашютная система [заявка №94005045 РФ, МПК B64D 17/34, G05D 1/00. Управляемая парашютная система / Абраменко Г.В., Краснощеков А.Ю., Фокин С.С.; заявитель и патентообладатель Центральный научно-исследовательский институт химии и механики; - №94005045/09; заявл. 10.02.1994; опубл. 20.01.1996.], которая содержит планирующий парашют, подвесную систему, платформу с блоком диагностики, блоком обнаружения, бортовым компьютером, инерциальной навигационной системой и контейнер управления стропами парашюта. Управление осуществляется командным блоком путем создания управляющих перегрузок с помощью затягивания строп на основе анализа информации от инерциальной навигационной системы и от блока обнаружения маяка, размещенном в месте посадки платформы. Анализ информации осуществляется блоком обнаружения, размещенным на платформе, связанным с командным блоком, один выход которого соединен с блоком управления, а второй выход - обратной связью с блоком обнаружения. Бортовой компьютер обеспечивает подачу команд на включение инерциальной навигационной системы, блока обнаружения и блока диагностики в соответствии с заданной временной циклограммой полета парашютной системы с блоком диагностики.
Известна управляемая парашютная система, [Пат. №2111898 РФ, МПК B64D 17/34. Управляемая парашютная система / Абраменко Г.В., Краев С.В., Краснощеков А.Ю., Фокин С.С.; заявитель и патентообладатель Центральный научно-исследовательский институт химии и механики; - №96118529/28; заявл. 17.09.1996; опубл. 27.05.1998], содержащая планирующий парашют с грузовой платформой, последовательно соединенные блок обнаружения маяка, командный блок, второй выход которого соединен с входом блока обнаружения маяка, и блок управления стропами парашюта. Управляемая парашютная система дополнительно содержит последовательно соединенные инерциальную навигационную систему, второй выход которой соединен с вторым входом командного блока, блок формирования управляющих сигналов на включение/выключение и задание начальных условий для инерциальной навигационной системы, второй выход которого соединен с входом инерциальной навигационной системы, третий выход и второй вход - соответственно с вторым входом и вторым выходом блока обнаружения маяка, и блок диагностики района поверхности Земли.
За прототип принята управляемая парашютная система для доставки грузов [Пат. №2039680 РФ, МПК B64D 17/34. Управляемая парашютная система для доставки грузов / Абраменко Г.В., Краев С.В., Краснощеков А.Ю., Лифиц А.Л.; заявитель и патентообладатель Центральный научно-исследовательский институт химии и механики; - №93031300/23; заявл. 08.06.1993; опубл. 20.07.1995.], которая содержит планирующий парашют, подвесную систему, грузовую платформу и контейнер управления стропами парашюта. Управление осуществляется командным блоком путем создания управляющих перегрузок с помощью затягивания строп на основе анализа информации о маяке, размещенном в месте приземления груза. Анализ информации осуществляется блоком обнаружения, размещенным на грузовой платформе, связанным с командным блоком, один выход которого соединен с блоком управления, а другой выход обратной связью с блоком обнаружения.
Недостатками аналогов и прототипа, является то, что они не обладают достаточной эффективностью, не обеспечивают точного приземления грузов в заданную точку, что приводит к значительным потерям грузов, и требует предварительного размещения маяка на точке приземления, что увеличивает время подготовки доставки грузов и создает риски причинения вреда жизни и здоровью лицам, выполняющим подготовку доставки груза таким способом.
Техническим результатом изобретения является повышение точности приземления грузов в заданный район или на площадку, ограниченную малыми размерами, сокращение времени подготовки доставки различных грузов (продовольствие, медикаменты, спасательная техника, вооружение и т.д.) в сложных метеоусловиях, в дневное и ночное время суток.
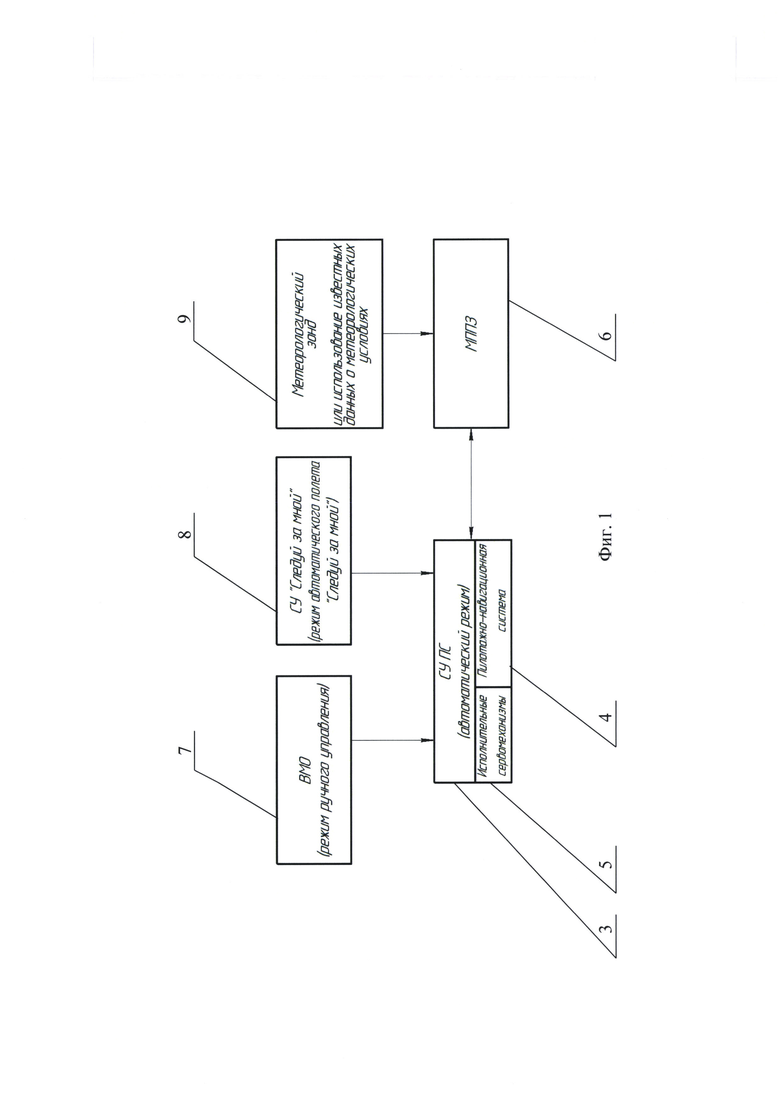
Указанный результат достигается тем, что автоматизированная парашютная система доставки грузов, содержащая управляемую парашютную систему (ПС), грузовую платформу, согласно изобретению, включает в себя систему управления парашютной системой (СУПС), содержащую пилотажно-навигационную систему (инерциальную, спутниковую радионавигационную систему) и исполнительные сервомеханизмы, модуль подготовки полетного задания (МППЗ), выносной модуль оператора (ВМО), систему управления «Следуй за мной» (СУСМ), метеорологический зонд (МЗ), при этом ПС, СУПС и грузовая платформа или парашютная грузовая обвязка (ПГО) связаны между собой с помощью элементов крепления, а СУПС, СУСМ, ВМО, МППЗ и МЗ связанны между собой с помощью радиоканала с возможностью работы в едином формате данных.
Грузовая платформа, при необходимости, выполнена с возможностью замены ее на парашютную грузовую обвязку (ПГО). В управляемой парашютной системе (ПС) использован парашют типа «крыло».
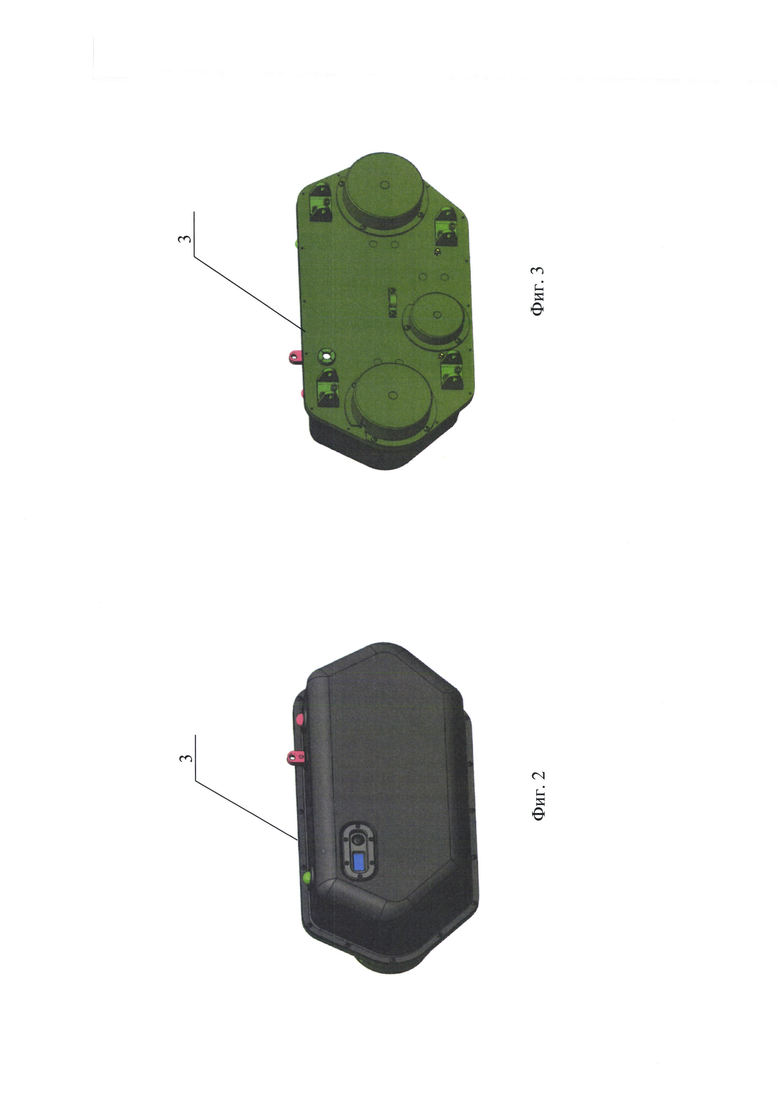
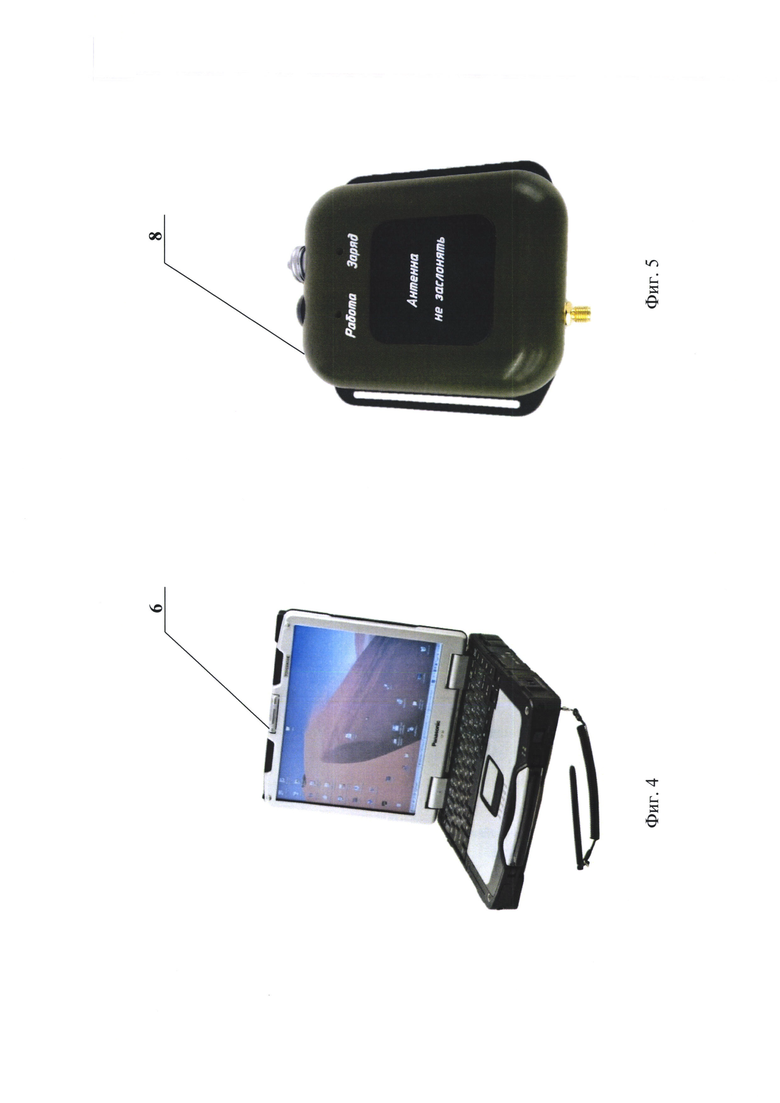
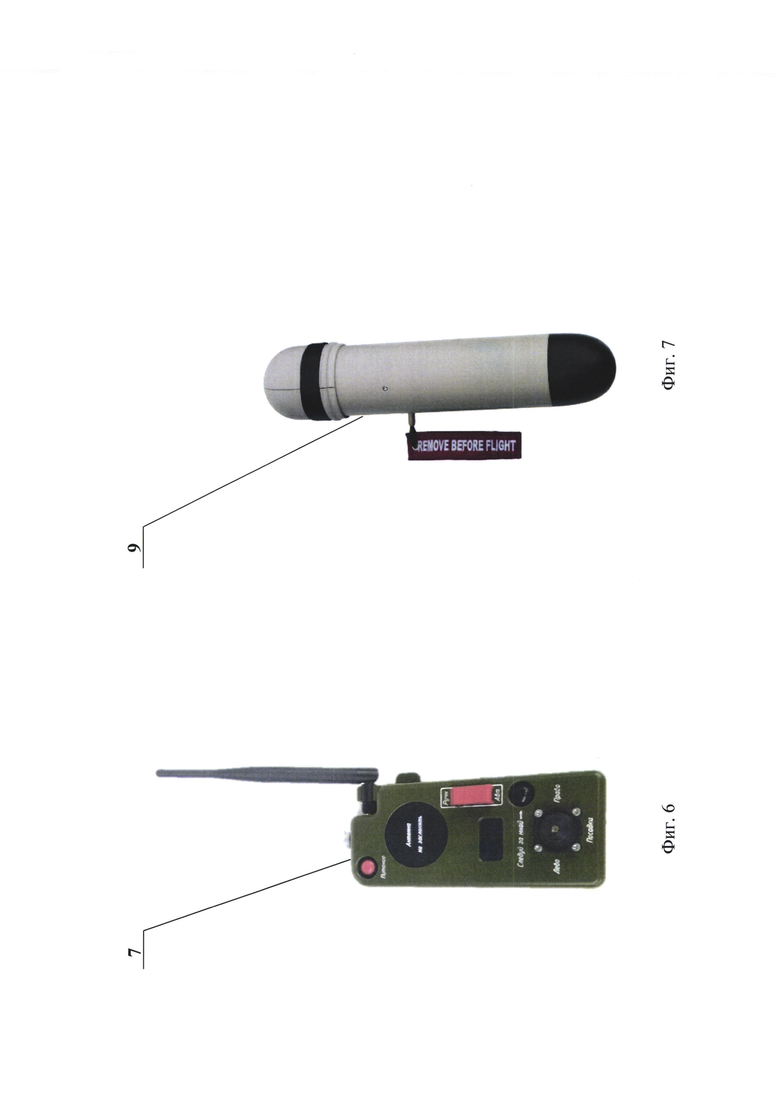
Изобретение поясняется чертежами, где на фиг. 1 представлена схема взаимодействия СУПС, СУСМ, ВМО, МППЗ и МЗ по радиоканалу; на фиг. 2 - система управления парашютной системой (СУПС), вид спереди; на фиг. 3 - система управления парашютной системой (СУПС), вид сзади; на фиг. 4 - модуль подготовки полетного задания (МППЗ); на фиг. 5 - система управления «Следуй за мной» (СУ «Следуй за мной»); на фиг. 6 - выносной модуль оператора (ВМО); на фиг. 7 - метеорологический зонд (МЗ).
Автоматизированная парашютная система (АПС) доставки грузов содержит управляемую парашютную систему (ПС) с парашютом типа «крыло» 1 (на чертежах не показаны), грузовую платформу или, при необходимости, парашютную грузовую обвязку 2 (ПГО) (на чертежах не показаны), систему управления парашютной системой 3 (СУПС), содержащую пилотажно-навигационную систему 4 (инерциальную, спутниковую радионавигационную систему) и исполнительные сервомеханизмы 5, модуль подготовки полетного задания 6 (МППЗ), выносной модуль оператора 7 (ВМО), систему управления «Следуй за мной» 8 (СУСМ), метеорологический зонд 9 (МЗ. ПС, СУПС и грузовая платформа или ПГО связаны между собой с помощью элементов крепления. СУПС, СУСМ, ВМО, МППЗ и МЗ связаны между собой с помощью радиоканала, работающих в едином формате данных (фиг 1).
АПС представляет собой совокупность функциональных блоков, позволяющих осуществлять доставку груза по воздуху в заданную точку приземления из летательного аппарата (ЛА), оборудованных штатным транспортно-десантным оборудованием, с высот до 8000 м над уровнем моря.
ПС 1, входящая в состав АПС, состоит из парашюта типа «крыло», устройства рифления, колец монтажных, контейнера парашюта с подвесной системой, камеры тормозного парашюта, купола тормозного парашюта, звена парашютного, камеры, вертлюга, звена расчековки контейнера.
СУПС 3 имеет четыре точки крепления, выполненные из стали для подсоединения замков подвесной системы крепления ПС 1. Исходя из возникающих нагрузок в момент раскрытия ПС 1 и приземления АПС СУПС 3 содержит силовой центральный элемент. К данному элементу крепятся все агрегаты и компоненты СУПС 3. Все компоненты и агрегаты СУПС закрыты обтекателем. С целью обеспечения герметичности и защиты обтекатель производится из стеклопластика. Вид спереди СУПС 3 показан на фиг. 2, вид сзади - на фиг. 3.
МППЗ 6 представляет собой промышленный защищенный ноутбук, предназначенный для работы на открытом воздухе в любое время суток и года, носимый (переносной), перевозимый всеми видами транспорта, обеспечивающий создание, хранение, отображение и редактирование полетных заданий на фоне электронной карты (фиг. 4).
СУСМ 8 крепится на руку оператора и обращено вверх радиопрозрачной вставкой для качественной работы приемника спутниковой радионавигационной системы. СУСМ 8 содержит выносную антенну для приема передачи информации с СУПС 3. Внешний вид СУСМ 8 представлен на фиг. 5.
ВМО 7 изготовлен для использования оператором в носимом (переносном) исполнении. Корпус ВМО 7 герметичен. Внешний вид ВМО 7 представлен на фиг. 6. Верхняя часть корпуса ВМО 7 содержит органы управления СУПС 3 и радиопрозрачную стеклотекстолитовую вставку, предназначенную для корректной работы спутниковой радионавигационной системы 4. ВМО 7 содержит поворотную антенну для приема-передачи данных с СУПС 3. В походном положении антенна укладывается вдоль корпуса ВМО 7. В рабочем положении антенна переводится в вертикальное положение для обеспечения устойчивой связи с СУПС 3.
МЗ 9 имеет однократное применение в связи с этим конструкция максимально проста и технологична. Внешний вид МЗ 9 представлен на фиг. 7. Верхняя часть МЗ 9 состоит из двух частей, изготовленных из легкого материала, скрепленных капроновой лентой. Нижняя часть МЗ 9 изготовлена из стеклопластика для обеспечения радиопрозрачности при работе антенны передающего устройства. МЗ содержит бесстроповый парашют 0,5 м2 для обеспечения его надежного спуска.
Автоматизированная парашютная система доставки грузов имеет зарядное устройство (ЗУ) для СУПС, МППЗ, ВМО, СУ «Следуй за мной».
Автоматизированная парашютная система доставки грузов работает следующим образом.
В соответствии с поставленными задачами управление ПС 2 осуществляется модулем системы управления, входящим в состав СУПС 3, путем воздействия на органы управления куполом парашюта с помощью затягивания строп парашюта на основе анализа и обработки информации о точке приземления автоматизированной парашютной системы АПС, введенной оператором при использовании МППЗ 6, значениях метрологических показателей, полученных с МЗ 9 или введенных оператором при использовании МППЗ 6, или работе СУ «Следуй за мной» 8 или при ручном управлении СУПС 8 с помощью ВМО 7, пилотажно-навигационных параметров полета АПС навигационным комплексом, в основе которого лежит бесплатформенная инерциальная навигационная система 4, корректируемая по сигналам спутниковых радионавигационных систем GPS и ГЛОНАСС.
АПС обеспечивает управление ПС 1 тремя способами (в трех режимах): полет в режиме автоматического управления, автоматический полет в режиме «Следуй за мной», полет в режиме управления оператором.
АПС функционирует следующим образом:
- специалисты, допущенные к эксплуатации, осуществляют подготовку СУПС 3 для десантирования с целью выполнения поставленных задач;
- оператор СУПС 3 вводит полетное задание в МППЗ 6;
- АПС монтируется на летательный аппарат для доставки АПС в точку десантирования. СУПС 3 при выполнении задач используется совместно с ПС 1 и грузовой платформой или УПГО 2;
- летчик выводит летательный район в район десантирования и осуществляет заход согласно полетному заданию;
- при достижении расчетных характеристик осуществляется десантирование АПС;
- после отделения АПС от летательного аппарата СУПС 3 выполняет работу согласно выбранному режиму работы:
а) в процессе полета АПС СУПС 3 работает в автоматическом режиме;
б) при необходимости и исходя из поставленных задач возможно изменение режима работы СУПС 3 в случае применения СУСМ 8, закрепленного на руке оператора, при этом СУПС 3 в полете будет наводиться на летящего оператора и следовать за ним до окончания полета, при этом предусмотрено ограничение максимального сближения АПС с летящим оператором 50 м;
в) при необходимости и исходя из поставленных задач возможно изменение режима работы СУПС 3 в случае применения ВМО 7. Оператор, находящийся на земле, может управлять СУПС 3 в ручном режиме путем перемещения органов управления парашютной системы ПС 1 сервомеханизмами по радиоканалу;
- после выполнения автоматического захода на посадку и посадки СУПС 3 заканчивает работу путем выключения питания автоматически.
Полет в режиме автоматического управления является основным режимом функционирования СУПС 3, в процессе которого происходит расчет параметров полета АПС для каждого участка заданного маршрута, и осуществляется модулем системы управления, входящим в состав СУПС 3, воздействующего на элементы управления парашютом типа «крыло», входящего в состав ПС 1. Управление осуществляется на основе заранее заданной оператором точки посадки АПС, исходя из конуса возможностей построенного программным обеспечением, с помощью МППЗ 6 и анализа информации о погодных условиях, получаемой с МЗ 9 и систем навигации GPS и ГЛОНАСС, и инерциальной системы навигации в случае недоступности систем навигации GPS и ГЛОНАСС. Системы навигации GPS и ГЛОНАСС, и инерциальная система навигации 4 входят в состав СУПС 3. Анализ информации осуществляет специальное программное обеспечение.
Автоматический полет в режиме «Следуй за мной» осуществляется модулем системы управления, входящим в состав СУПС 3, воздействующего на элементы управления парашютом типа «крыло», входящего в состав управляемой парашютной системы ПС 1. Блок управления осуществляет управление ПС 1 на основе анализа данных, получаемых с СУСМ 3, размещаемым на парашютисте на основе специального программного алгоритма, таким образом, что управляемая парашютная система полностью повторяет все маневры парашютиста, следующего впереди автоматизированной парашютной системы АПС доставки груза.
Полет в режиме управления оператором осуществляется модулем системы управления, входящим в состав СУПС 3, воздействующего на элементы управления парашютом типа «крыло», входящего в состав управляемой парашютной системы. В данном режиме блок управления осуществляет управление ПС 1 на основе команд, получаемых с ВМО 7, которым управляет оператор.
Проведенные испытания и математическое моделирование подтвердили эффективность предлагаемого изобретения с достижением указанного выше технического результата.
Предлагаемая автоматизированная парашютная система доставки грузов обеспечивает точную доставку груза различных габаритов любого назначения массой от 250 до 4000 кг по воздуху в заданную точку приземления, без необходимости предварительного разведывания местности и размещения дополнительного оборудования на точке приземления, с высот до 8000 м над уровнем моря тремя способами (в трех режимах): полет в режиме автоматического управления, автоматический полет в режиме «Следуй за мной», полет в режиме управления оператором с помощью надежной, прочной и удобной в эксплуатации автоматизированной парашютной системы доставки грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА ДЛЯ ДОСТАВКИ ГРУЗОВ | 1993 |
|
RU2039680C1 |
| Беспилотный транспортный модуль и способ его применения | 2024 |
|
RU2825031C1 |
| ПАРАШЮТНАЯ ГРУЗОВАЯ ОБВЯЗКА | 2021 |
|
RU2760880C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ПАССАЖИРОВ И ГРУЗОВ И МОДУЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2708119C1 |
| Подвесной отстыковывающийся авиаконтейнер с управляемой парашютной системой | 2021 |
|
RU2758620C1 |
| Система Костенюка быстрой доставки людей и грузов с поля или на поле боя | 2023 |
|
RU2809726C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Многокупольная крыльевая система | 2020 |
|
RU2770501C2 |
Изобретение относится к грузовым управляемым парашютным системам. Автоматизированная парашютная система доставки грузов содержит управляемую парашютную систему (ПС), грузовую платформу и включает систему управления парашютной системой (СУПС), содержащую пилотажно-навигационную систему и исполнительные сервомеханизмы, модуль подготовки полетного задания (МППЗ), выносной модуль оператора (ВМО), систему управления «Следуй за мной» (СУСМ), метеорологический зонд (МЗ). ПС, СУПС и грузовая платформа или ПГО связаны между собой с помощью элементов крепления. СУПС, СУСМ, ВМО, МППЗ и МЗ связаны между собой с помощью радиоканала с возможностью работы в едином формате данных. Изобретение направлено на повышение точности приземления грузов в заданный район, сокращение времени подготовки доставки различных грузов в сложных метеоусловиях. 3 з.п. ф-лы, 7 ил.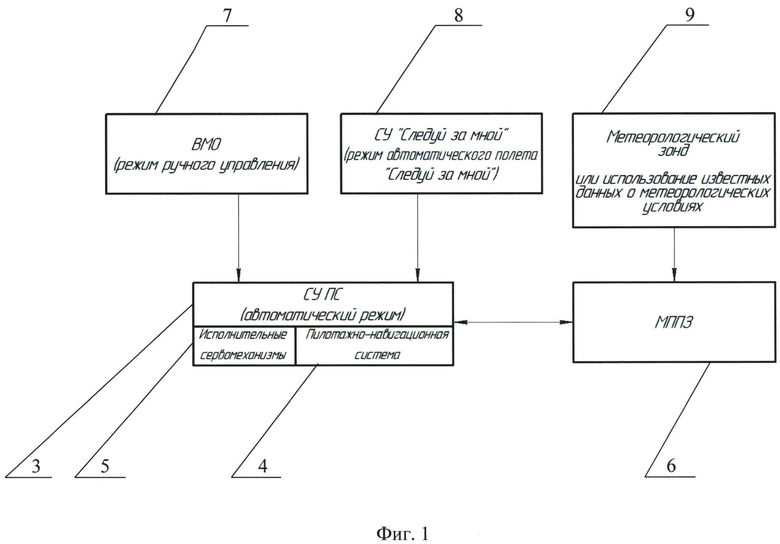
1. Автоматизированная парашютная система доставки грузов, содержащая управляемую парашютную систему (ПС), грузовую платформу, отличающаяся тем, что включает в себя систему управления парашютной системой (СУПС), содержащую пилотажно-навигационную систему и исполнительные сервомеханизмы, модуль подготовки полетного задания (МППЗ), выносной модуль оператора (ВМО), систему управления «Следуй за мной» (СУСМ), метеорологический зонд (МЗ), при этом ПС, СУПС и грузовая платформа или парашютная грузовая обвязка (ПГО) связаны между собой с помощью элементов крепления, а СУПС, СУСМ, ВМО, МППЗ и МЗ связаны между собой с помощью радиоканала с возможностью работы в едином формате данных.
2. Автоматизированная парашютная система доставки грузов по п. 1, отличающаяся тем, что в качестве парашюта использован парашют типа «крыло».
3. Автоматизированная парашютная система доставки грузов по п. 1, отличающаяся тем, что выполнена с возможностью заменены грузовой платформы на парашютную грузовую обвязку (ПГО).
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА ДЛЯ ДОСТАВКИ ГРУЗОВ | 1993 |
|
RU2039680C1 |
| US 9508265 B2, 29.11.2016 | |||
| EP 1419088 B1, 03.10.2007 | |||
| US 8781719 B1, 15.07.2014 | |||
| US 8489256 B2, 16.07.2013 | |||
| Система сопровождения для беспилотных авиационных транспортных средств | 2015 |
|
RU2692306C2 |
| CN 110844045 A, 28.02.2020. | |||

