ОБЛАСТЬ ТЕХНИКИ
Настоящее раскрытие относится, в общем, к системам автоматизированного проектирования, вычерчивания (“CAD”), изготовления (“CAM”) и визуализации (по отдельности и совместно, “системам CAD”), системам управления жизненным циклом продукта (“PLM”) и подобным системам, которые управляют данными для продуктов и других объектов (совместно, системам “управления данными продукта” или системам PDM).
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Системы PDM управляют PLM и другими данными. Желательны усовершенствованные способы и системы.
Краткое описание сущности раскрытия
Различные раскрытые варианты осуществления включают в себя способы для модифицирования модели системы автоматизированного проектирования (CAD) в системе моделирования.
Способ управления моделью системы автоматизированного проектирования (CAD), причем способ, выполняемый в системе обработки данных, может содержать модифицирование модели системы автоматизированного проектирования (CAD) для изделия, подлежащего проектированию или изготовлению, при этом способ, выполняемый в системе обработки данных, содержит, в модели системы CAD, способной представлять изделие как алгебраическую геометрию или фасетную геометрию, прием сетчатой (ячеистой) геометрии, представляющей поверхность изделия в 3 измерениях; прием ограничений, подлежащих применению к сетчатой геометрии, решение сетчатой геометрии как точной поверхности; и сохранение обновленной модели сетчатой геометрии.
Система обработки данных может включать в себя процессор и доступную память, причем система обработки данных, в частности, сконфигурирована, чтобы выполнять, в модели системы CAD, способной представлять изделие как алгебраическую геометрию или фасетную геометрию, этапы приема сетчатой геометрии, представляющей поверхность изделия в 3 измерениях; приема ограничений, подлежащих применению к сетчатой геометрии, решения сетчатой геометрии как точной поверхности; и сохранения обновленной модели сетчатой геометрии.
Не-временный считываемый компьютером носитель, закодированный с исполняемыми инструкциями, которые при исполнении побуждают одну или более систем обработки данных выполнять способ модифицирования модели системы автоматизированного проектирования (CAD), причем способ, выполняемый в системе обработки данных, содержит, в модели системы CAD, способной представлять изделие как алгебраическую геометрию или фасетную геометрию, прием сетчатой геометрии, представляющей поверхность изделия в 3 измерениях; прием ограничений, подлежащих применению к сетчатой геометрии, решение сетчатой геометрии как точной поверхности; и сохранение обновленной модели сетчатой геометрии.
Изложенное выше охарактеризовало весьма широко признаки и технические преимущества настоящего раскрытия, так что специалисты в данной области техники могут лучше понять подробное описание, которое следует далее. Далее будут описаны дополнительные признаки и преимущества раскрытия, которые формируют предмет формулы изобретения. Специалистам в данной области техники будет понятно, что они могут использовать концепцию и конкретный раскрытый вариант осуществления в качестве основы для модифицирования или проектирования других структур для выполнения тех же самых целей настоящего раскрытия. Специалистам в данной области техники также будет понятно, что такие эквивалентные конструкции не отклоняются от объема раскрытия в его самой широкой форме.
Прежде чем перейти к подробному описанию, изложенному ниже, может быть предпочтительным изложить определения некоторых слов или фраз, используемых в настоящем патентном документе: термины “включать в себя” и “содержать”, а также их производные означают включение без ограничения; термин “или” является инклюзивным, означая и/или; и термин “контроллер” означает любое устройство, систему или их часть, которая управляет по меньшей мере одной операцией, независимо от того, реализовано ли такое устройство в аппаратных средствах, прошивке, программном обеспечении или некоторой комбинации по меньшей мере двух из этого. Следует отметить, что функциональность, ассоциированная с любым конкретным контроллером, может быть централизованной или распределенной, локально или удаленно. Определения для некоторых слов и фраз предоставляются по всему настоящему патентному документу, и специалистам в данной области техники будет понятно, что такие определения применяются во многих, если не в большинстве, случаев для предшествующих, а также будущих использований определенных таким образом слов и фраз. В то время как некоторые термины могут включать в себя большое разнообразие вариантов осуществления, прилагаемая формула изобретения может явно ограничивать эти термины до конкретных вариантов осуществления.
Краткое описание чертежей
Теперь будет описан пример способа и системы в соответствии с настоящим раскрытием со ссылкой на прилагаемые чертежи, на которых:
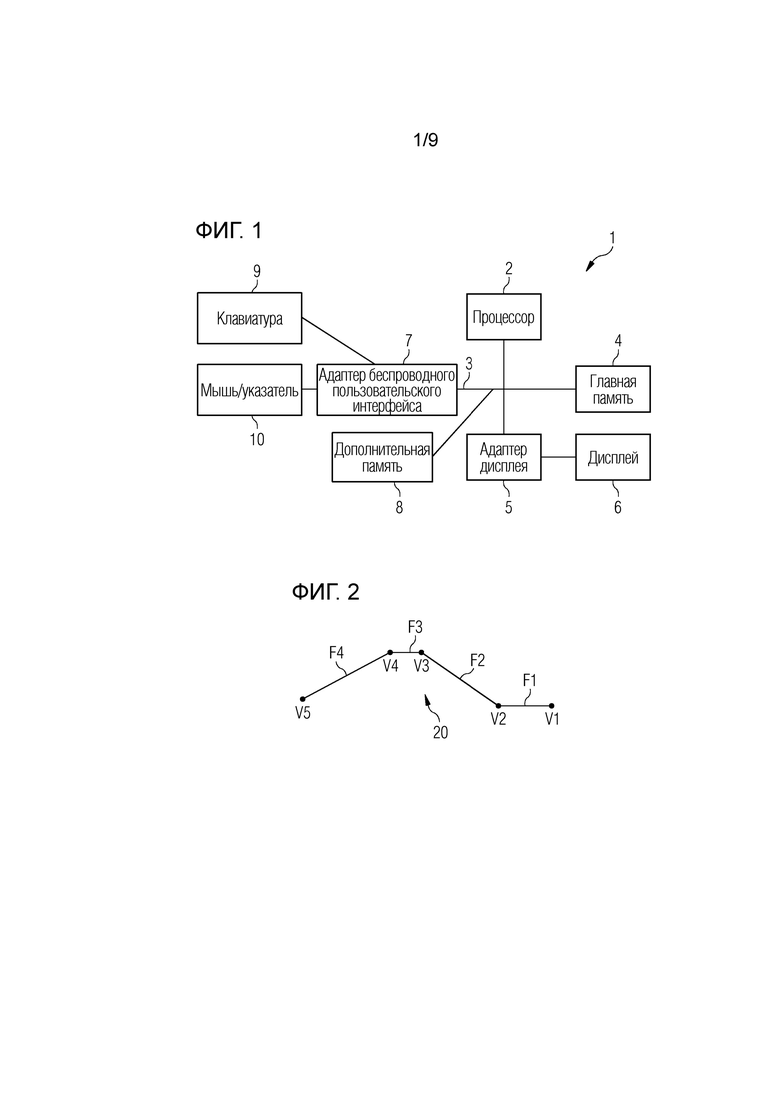
Фиг. 1 представляет собой блок-схему системы обработки данных, в которой может быть реализован вариант осуществления;
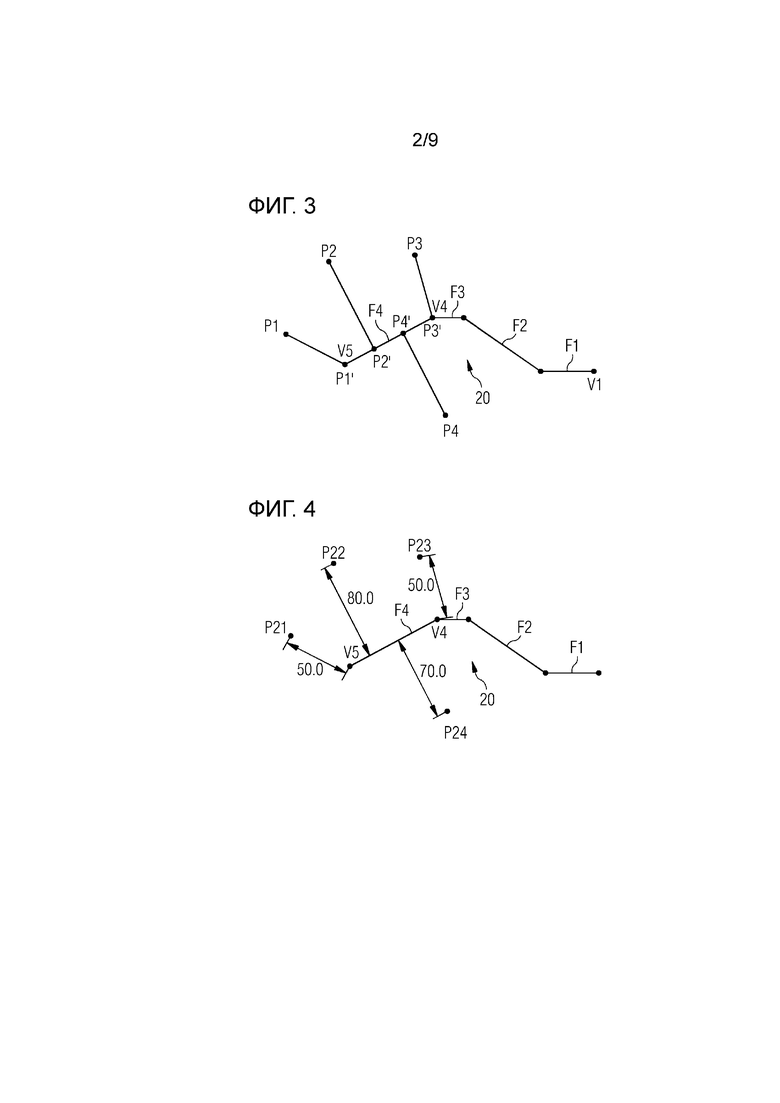
Фиг. 2 иллюстрирует 2D представление примера сетки, представляющей поверхность изделия, которое моделируется в соответствии со способом согласно настоящему раскрытию;
Фиг. 3 иллюстрирует использование способа для применения соответствующих ограничений к точкам для сетки согласно фиг. 2;
Фиг. 4 показывает 2D представление различных измерений расстояния между точками и сеткой согласно фиг. 2;
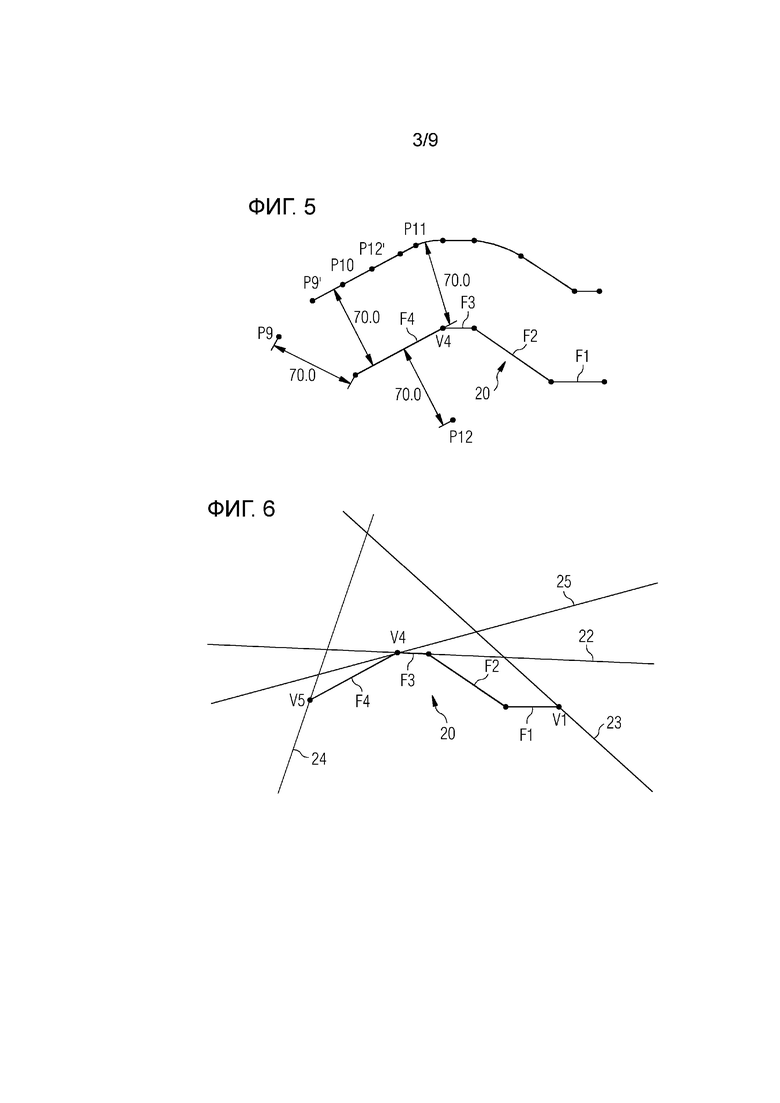
Фиг. 5 иллюстрирует геометрическое место точек, которые представляют собой измерение расстояния от сетки согласно фиг. 2, когда одна сторона была задана;
Фиг. 6 показывает некоторые примеры решенных ограничений касания между 2D представлениями плоскостей и сеткой согласно фиг. 2;
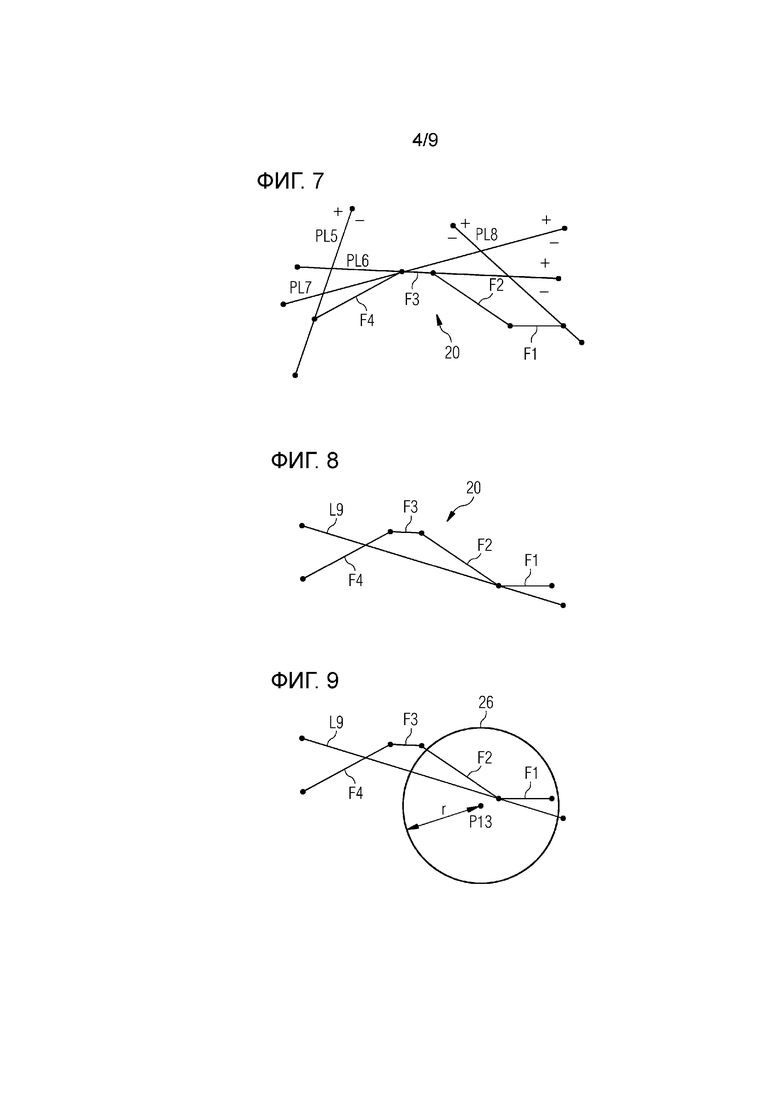
Фиг. 7 показывает некоторые примеры ограничений касания между 2D представлениями планарных полупространств и сеткой согласно фиг. 2;
Фиг. 8 иллюстрирует касание между плоскостью и сеткой согласно фиг. 2;
Фиг. 9 иллюстрирует использование вспомогательной сферы для решения примера согласно фиг. 8;
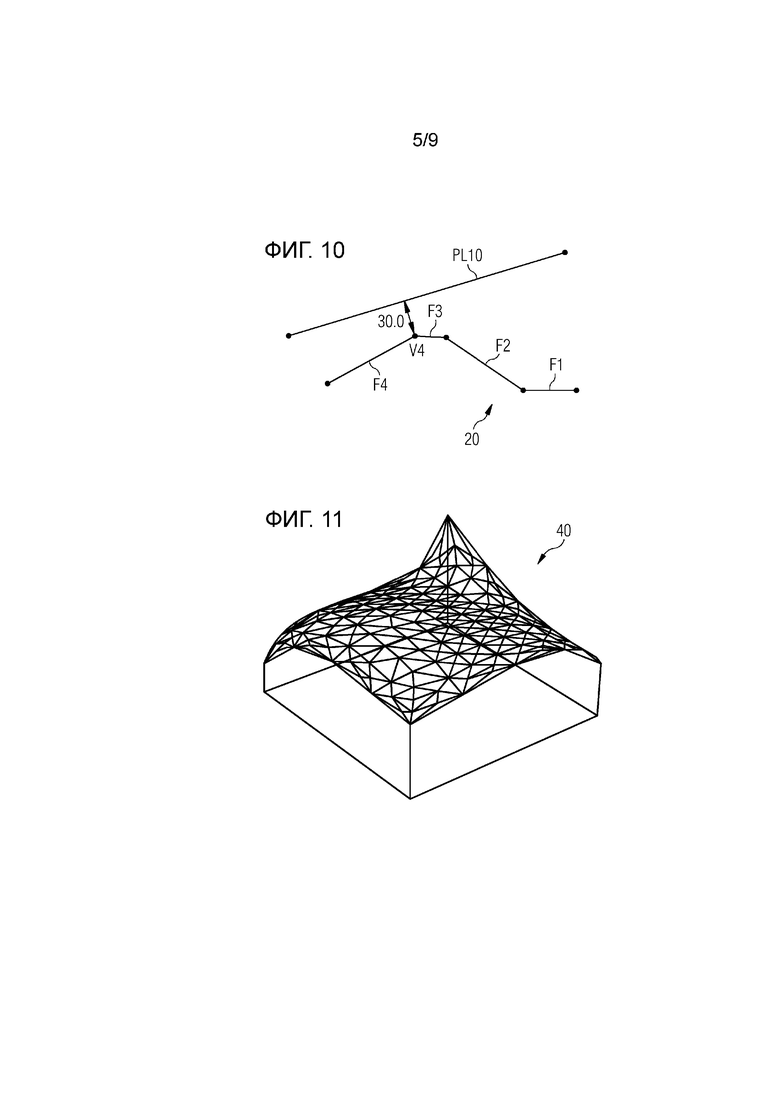
Фиг. 10 иллюстрирует один пример измерения расстояния, созданного между плоскостью и сеткой согласно фиг. 2;
Фиг. 11 иллюстрирует пример гибридной детали, к которой может применяться способ согласно настоящему раскрытию;
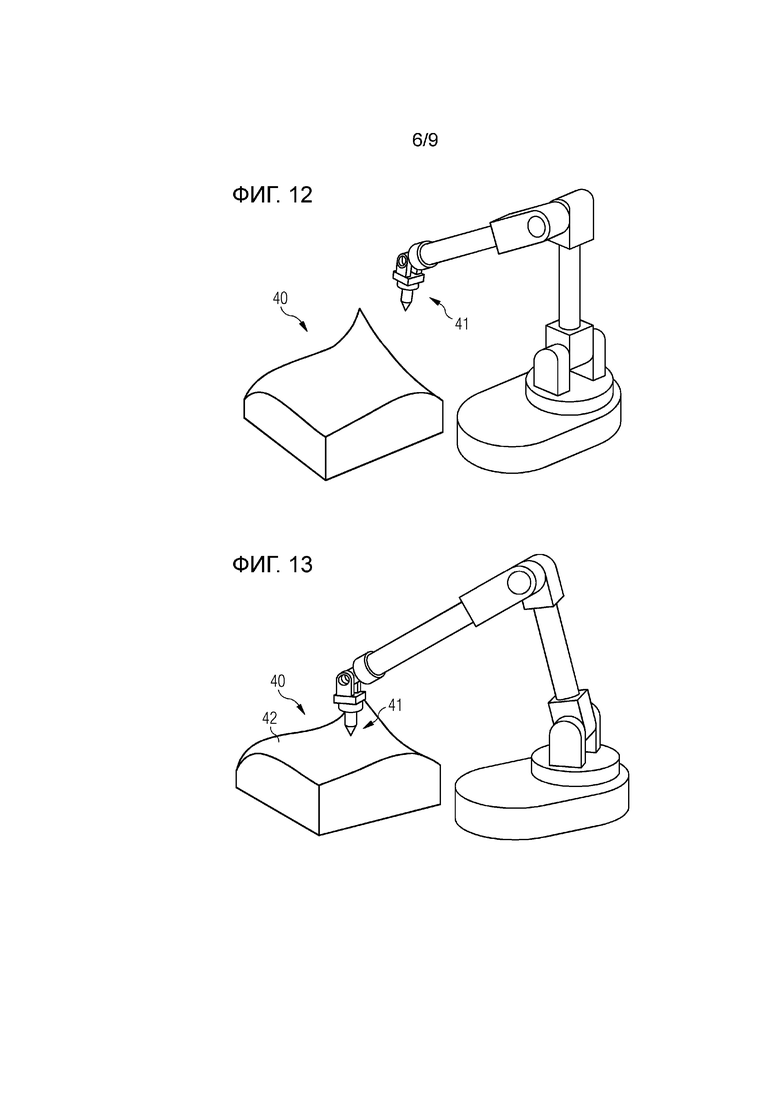
Фиг. 12 показывает модель гибридной детали согласно фиг. 11 с устройством, таким как измерительный зонд или режущий инструмент;
Фиг. 13 иллюстрирует ту же самую модель, что и на фиг. 12, где зонд или режущий инструмент совпадает с фасетной лицевой стороной гибридной детали согласно фиг. 11;
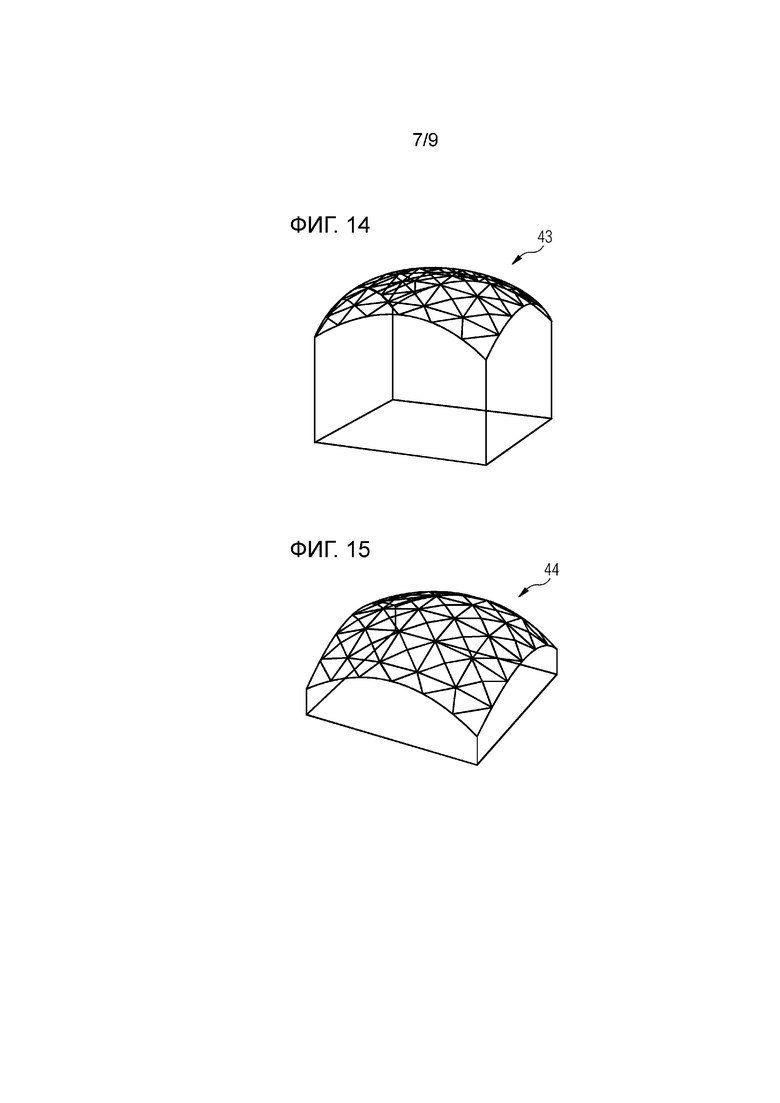
Фиг. 14 иллюстрирует пример другой гибридной детали, к которой может применяться способ согласно настоящему раскрытию:
Фиг. 15 показывает более тонкую версию детали согласно фиг. 14;
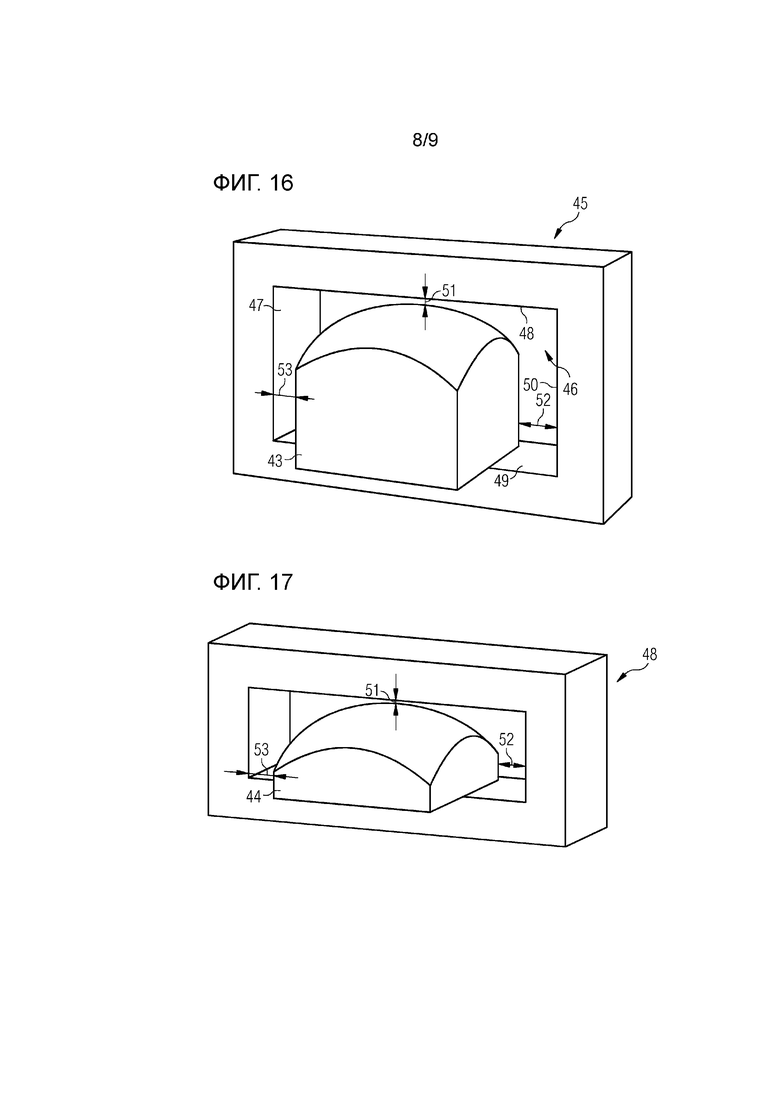
Фиг. 16 иллюстрирует гибридную деталь согласно фиг. 14, вставленную в сборочный узел;
Фиг. 17 иллюстрирует модель согласно фиг. 16, в которой был изменен размер деталей;
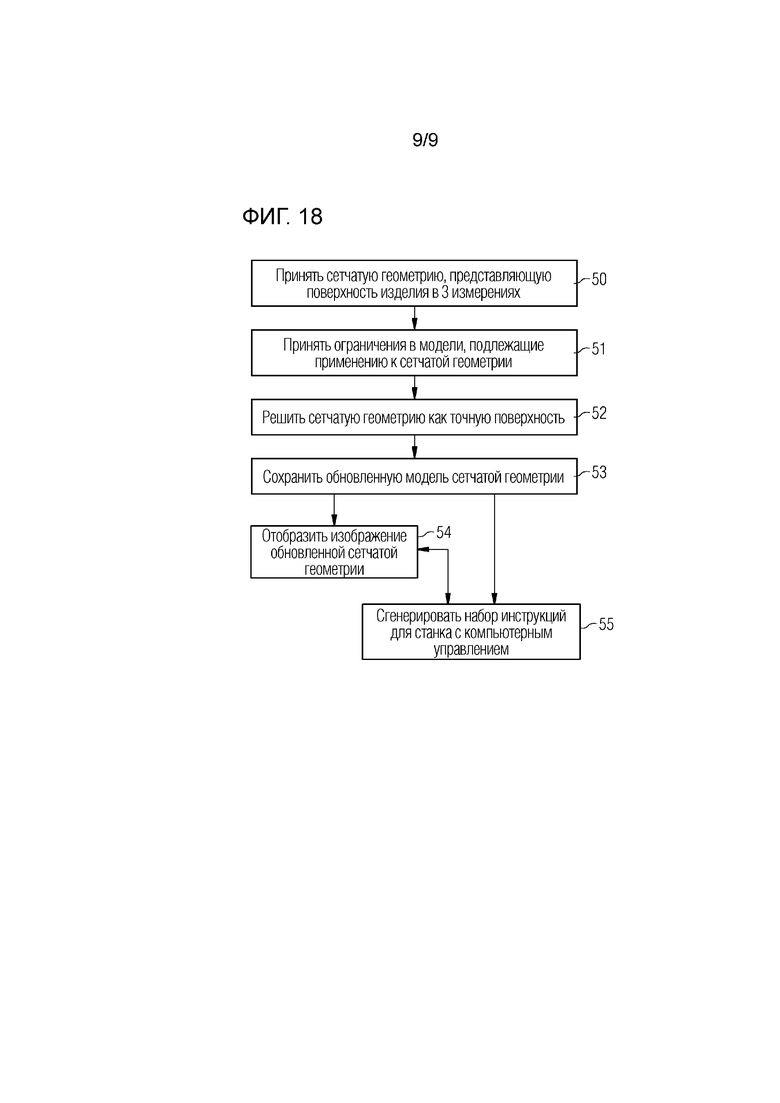
Фиг. 18 представляет собой блок-схему последовательности операций способа модифицирования модели в соответствии с раскрытыми вариантами осуществления.
Подробное описание
Варианты осуществления согласно фиг. 1-18, используемые для описания принципов настоящего раскрытия в настоящем документе, приведены только в качестве иллюстрации и не должны пониматься как ограничивающие каким-либо образом объем раскрытия. Специалистам в данной области техники будет понятно, что принципы настоящего раскрытия могут быть реализованы в любом скомпонованном соответствующим образом устройстве, приборе, системе или способе.
Способ согласно настоящему раскрытию может дополнительно содержать по меньшей мере одно из отображения изображения обновленной сетчатой геометрии; и генерирования набора инструкций для станка с компьютерным управлением. Это обеспечивает лучшее управление процессом проектирования с использованием способа согласно настоящему изобретению, приводит к проектам для деталей, которые с меньшей вероятностью будут трудно изготавливаемыми, чем это могло иметь место ранее, что экономит время и усилия, а также затраты. Ограничения могут содержать по меньшей мере одно из геометрии, совпадающей с сетчатой геометрией; измерения расстояния между геометрией и сетчатой геометрией; или геометрии, касающейся сетчатой геометрии.
Решение может содержать способ удовлетворения принятых ограничений путем определения решенного местоположения для каждого ограничения и определения для каждого ограничения расстояния от этого решенного местоположения и вектора первой производной расстояния для каждого ограничения, примененного к сетчатой геометрии; и применения изменения на основе определенного расстояния и вектора первой производной расстояния. Способ определяет воздействие на деталь, подлежащую изготовлению, с точки зрения расстояния и направления.
Способ может дополнительно содержать выбор подобласти принятой сетчатой геометрии и выполнение вычислений расстояния и первой производной для подобласти. Это обеспечивает возможность решения для локального минимального расстояния, а не для глобального минимального расстояния. Подобласть может быть модифицирована во время вычислений решения, или она может быть немодифицированной.
Имеется множество возможных способов, посредством которых можно определить подобласть, но способы могут включать в себя то, что подобласть содержит одну из той части принятой сетчатой геометрии, которая лежит в пределах сферы, определенной заданным радиусом вокруг заданной точки; которая лежит в пределах прямоугольника заданного размера и местоположения; которая лежит в пределах области, идентифицированной конечным пользователем, вычерчивающим замкнутый контур на сетке; которая лежит в пределах области сетки, которая является гладкой; или которая лежит в пределах области, которая ограничена краями.
Геометрия может содержать одно из точки, кривой, алгебраической поверхности, фасетной поверхности или сетчатой геометрии. Геометрия может быть ограниченной или неограниченной. Неограниченная геометрия представляет собой геометрию, которая продолжается до бесконечности. Например, плоскость, линия без конечных точек. Ограничения могут применяться между точкой, кривой, алгебраической поверхностью, фасетной поверхностью, другой сетчатой геометрией и принятой сетчатой геометрией. Сетчатая геометрия может содержать одну или более точек, кривых, алгебраических поверхностей или фасетных поверхностей или их комбинации. Сетчатая геометрия может представлять собой одну точку, кривую или поверхность или множество каждого из них, такое как облако точек, или любую комбинацию упомянутых вариантов.
Ограничения могут приниматься от внешнего источника, извлекаться из хранилища или выводиться из геометрии в модели. Способ может представлять собой итерационный способ, так как это обеспечивает возможность влияния множества ограничений, подлежащих реализации. Способ изготовления детали может содержать моделирование детали в соответствии с этим раскрытием, ввод обновленной сетчатой геометрии в станок с компьютерным управлением и воссоздание ассоциированного изделия в материале с использованием станка с компьютерным управлением.
Фиг. 1 иллюстрирует пример системы обработки данных, в которой может быть реализован вариант осуществления настоящего раскрытия, например, системы CAD, сконфигурированной, чтобы выполнять процессы, как описано в настоящем документе. Система 1 обработки данных содержит процессор 2, соединенный с локальной системной шиной 3. Локальная системная шина соединяет процессор с главной памятью 4 и адаптером 5 графического отображения, который может быть соединен с дисплеем 6. Система обработки данных может осуществлять связь с другими системами через адаптер беспроводного пользовательского интерфейса, соединенный с локальной системной шиной 3, или через проводную сеть, например, локальную сеть. Дополнительная память 8 может также быть соединена посредством локальной системной шины. Подходящий адаптер, такой как адаптер 7 беспроводного пользовательского интерфейса, для других периферийных устройств, таких как клавиатура 9 и мышь 10 или другое указательное устройство, позволяет пользователю обеспечивать ввод в систему обработки данных. Другие периферийные устройства могут включать в себя один или более контроллеров I/O, таких как USB-контроллеры, Bluetooth-контроллеры и/или специализированные аудио контроллеры (соединенные с динамиками и/или микрофонами). Следует также понимать, что различные периферийные устройства могут быть соединены с USB-контроллером (через различные USB-порты), включая устройства ввода (например, клавиатуру, мышь, тачскрин, трекбол, камеру, микрофон, сканеры), устройства вывода (например, принтеры, динамики) или любой другой тип устройства, которое приводится в действие, чтобы обеспечивать вводы или принимать выводы от системы обработки данных. Дополнительно следует понимать, что многие устройства, упоминаемые как устройства ввода или устройства вывода, могут обеспечивать вводы и принимать выводы коммуникаций с системой обработки данных. Дополнительно следует понимать, что другие периферийные аппаратные средства, соединенные с контроллерами I/O, могут включать в себя любой тип устройства, прибора или компонента, который сконфигурирован, чтобы осуществлять связь с системой обработки данных. Дополнительно, системы могут использовать другие типы устройств ввода, чтобы обеспечивать вводы для манипулирования объектами, таких как мышь, указатель, тачпад, графический планшет, трекбол, джойстик, кнопочная консоль, клавиатура, камера, устройство восприятия движения, которое захватывает жесты движений, или любой другой тип устройства ввода, способного обеспечивать вводы, описанные здесь.
В системах CAD пользователю может быть желательно смоделировать проект для продукта или для системы, содержащей множество деталей, сгенерировать технологические инструкции для изготовления этого продукта или деталей или ввести модификации в проект или технологические инструкции. Традиционно модели представляли собой либо классические модели контурного представления (B-rep), составленные из алгебраической геометрии, либо фасетные модели. С прогрессом в способах изготовления, в частности, аддитивного изготовления, или 3D-печати, были разработаны модели, сочетающие оба типа геометрических представлений, известные как гибридные модели. В гибридной модели, грани (фасеты) модели B-rep могут представлять собой алгебраические геометрии (неоднородный рациональный сплайн (NURBS), плоскость, цилиндр, тор и т.д.) или быть фасетными. Эти гибридные модели могут использовать отсканированные цифровым образом модели, технологические процессы CAE или фасетные модели 3D-печати непосредственно с традиционными операциями моделирования B-rep, сокращая время и усилия, которые требовались раньше для преобразования фасетных моделей в алгебраическую геометрию CAD. Методы аддитивного изготовления означают, что изготавливаемые продукты больше не ограничены правильными формами, которые могут обрабатываться на станке, такими как блоки или цилиндры, но позволяют изготавливать органические формы, решетчатые структуры или плавно волнообразные поверхности. Эти типы формы, структуры или поверхности лучше представляются фасетами, чем классической геометрией. Для 3D-печати информация фасет отправляется на станок для изготовления продукта или детали.
Эти новые методы изготовления обеспечивают усовершенствования в процессах проектирования и изготовления. Например, при проектировании летательных аппаратов или проектировании моторных транспортных средств важен вес, потому желательна замена тяжелых коробчатых компонентов легкими по весу решетками или органическими формами. Проекты нацелены на поддержание прочности, в то же время уменьшая общий вес, но они все еще должны иметь возможность сопряжения и функционирования с другими компонентами летательного аппарата или транспортного средства, которые могли оставаться без изменений.
Геометрические ограничения и измерения (совместно, “ограничения”) являются существенной частью современных систем CAD. Ограничения позволяют задавать (специфицировать, указывать) размер и форму отдельных компонентов и также обеспечивают возможность относительного позиционирования множества компонентов. Ограничения могут быть многих различных типов, например, относиться к размеру, форме или ориентации деталей моделируемого узла. Любые изменения одной детали системы, подлежащей изготовлению, которая обрабатывается в модели проектирования, могут потребовать принимать во внимание другие детали системы, с которыми она должна сопрягаться или с которыми она должна работать. Эти отношения могут быть представлены с помощью ограничений.
Для всех проектных модификаций модели, независимо от того, целый ли это продукт или только малая деталь продукта, требуется, чтобы результат был корректно установлен по размерам и позиционирован относительно любых других продуктов или деталей, с которыми он будет работать. Например, может быть желательно уменьшить толщину детали, чтобы уменьшить ее вес, в то же время по-прежнему гарантируя, что она точно подгоняется между двумя другими деталями. Можно контролировать толщину детали, используя измерение расстояния между двумя фасетами. В то же время, ограничения касания могут применяться к другим граням, чтобы гарантировать, что требуемые отношения для других деталей поддерживаются.
Однако проблема применения ограничений в гибридных моделях не была решена. Для чисто фасетных моделей, традиционно, чтобы применить ограничения к фасетным поверхностям, было необходимо преобразование в алгебраическую геометрию, например, посредством аппроксимации фасетной поверхности B-сплайн-поверхностью. Однако это может привести к нежелательным колебаниям, или волнистости, в поверхности. Если они не ощутимы до последней стадии в процессе проектирования, это может привести к излишней переделке. Настоящее раскрытие предоставляет способ обеспечения возможности использования ограничений и измерений на такой гибридной модели без преобразования. Способ позволяет точно решать ограничение, применяемое к фасетной поверхности гибридной модели, избегая дополнительных колебаний, или волнистости, которые могли бы проявляться в аппроксимации, если бы использовались традиционные методы.
Настоящее раскрытие обеспечивает способ интерпретирования сетчатой геометрии, так что она может по-прежнему решаться в системе CAD, когда применяются ограничения. Для целей настоящей заявки, были предоставлены упрощенные примеры, но на практике примерная сетка согласно фиг. 2 может представлять целый продукт, подлежащий изготовлению, или только малую деталь гораздо большей системы. Различные типы сетчатой геометрии могут поддерживаться настоящим способом, включая поверхность, определяемую плоскими фасетами, набор поверхностей с геометрией любого типа (например, обычное листовое тело), неразветвленная сетка, самопересекающаяся сетка, сетка с симметриями (например, скошенная), облака точек или нежесткая сетка. Примеры, описанные ниже, могут применяться к любому из этих типов сетчатой геометрии.
Одним обычным примером типа сетки, к которому может применяться способ согласно настоящему раскрытию, является поверхность, составленная из плоских фасетов, определяемых вершинами фасетов. Края фасета, т.е. линии, соединяющие вершины фасета, могут представлять собой внутренние края, если они ограничивают более одного фасета, или внешние края, если они ограничивают один фасет. Обычно, сетка представляет собой жесткую сетку, хотя будут иметься также применения для нежестких сеток. Жесткая сетка имеет определенную форму, которая не может изменяться. Однако положение сетки может изменяться, поэтому ограничения могут использоваться, чтобы позиционировать сетку относительно другой геометрии. Для некоторых практических применений, таких как проектирование для аддитивного изготовления, сетка должна быть разветвленной сеткой, имеющей положительную и отрицательную сторону и нормали фасета, которые постоянны по смежным фасетам. Однако способ может применяться к неразветвленной сетке или самопересекающейся сетке.
Фиг. 2 иллюстрирует 2D представление примера жесткой фасетной сетки 20, представляющей поверхность моделируемого изделия. Сетка обычно представляет собой поверхность, определяемую планарными фасетами, но способ применим к любой совокупности граней, независимо от того, представляют ли они собой соединенные грани, соединенные по общему краю или несоединенные грани. Представление содержит последовательность фасетов F1-F4 и вершин V1-V5. Вершины V2-V4 представляют собой внутренние вершины фасета. Вершины V1 и V5 представляют собой внешние вершины фасета. Ограничения, подлежащие применению к сетке, обычно представляют собой геометрические отношения, например, отношение такое, как точка, совпадающая с сеткой, измерение расстояния между точкой и сеткой, плоскость, касающаяся сетки, или измерение расстояния между плоскостью и сеткой. Представление фасетной геометрии, или сетка 20, как принято в модели, могло быть отсканировано из существующего продукта, который необходимо модернизировать или отремонтировать, или могло быть сгенерировано как часть более раннего этапа в процессе проектирования, например, с использованием данных требований прочности и приблизительной формы для генерации проектного представления изделия, которое может изготавливаться, когда процесс проектирования завершен.
Может применяться ряд ограничений различных типов между точкой и сеткой, например, ограничение совпадения, измерение расстояния или измерение со знаком расстояния до сетки.
Ограничение совпадения между точкой P и сеткой решается, когда точка лежит на сетке. Этот тип ограничения может использоваться, чтобы представлять требование в модели изделия, подлежащего изготовлению, что точка в одной детали совпадает с сеткой в другой детали. Может существовать множество аналогичных ограничений в модели, которые используются, чтобы задавать (специфицировать) размер, форму или ориентацию каждой детали. Решение может находиться внутри фасета, на краю фасета или в вершине фасета. Если точка не находится вначале на сетке и отсутствуют другие ограничения на точке, то желательным решением является ближайшее положение на сетке. Если не имеется единственного ближайшего положения, то поведение задается (специфицируется) так, что имеется повторяемый способ выбора решения. Имеется множество опций для задания (специфицирования) поведения, примерами которых является выбрать положение, ближайшее к началу, выбрать положение, ближайшее к центроиду сетки, или выбрать положение, ближайшее к местоположению, выбранному инженером.
Фиг. 3 иллюстрирует ряд точек P1-P4 и 2D представление фасетной сетки согласно фиг. 2. Применение ограничений совпадения между сеткой и этими точками P1-P4 дает соответствующие точки P1’-P4’ решения, где точки решаются на сетке, как показано. Точка P1 решается в P1’, на внешней вершине V5, точка P2 решается в P2’, на внутреннем фасете фасета F4, точка P3 решается в P3’, на внешней вершине V4, и точка P4 решается в P4’ на внешнем фасете фасета F4. Так как P4 равноудалена от двух фасетов F4 и F2, требуется подходящий способ предоставления одного и того же решения по каждому решению, как описано выше, такой как выбор положения, ближайшего к началу, выбор положения, ближайшего к центроиду сетки, или выбор положения, ближайшего к местоположению, выбранному инженером.
Измерение расстояния между точкой Pn и сеткой решается, когда глобальное ближайшее приближение между точкой и сеткой равно значению расстояния, т.е. когда минимальное расстояние от точки до сетки равно значению измерения. Этот тип ограничения может использоваться, чтобы представлять требование в модели, подлежащей изготовлению, заданной толщины в любом местоположении на поверхности, например, где это требуется, чтобы достичь данной прочности, или чтобы поддерживать зазор между точкой и поверхностью сетки, чтобы изготовленная модель могла быть подвергаться сборке.
Фиг. 4 показывает 2D представление различных измерений расстояния между точками и сеткой согласно фиг. 2. Так как фиг. 4 представляет собой 2D представление 3D фасетной поверхности, и если точка имеет измерение расстояния до 3D фасетной поверхности, то точка будет решаться на сферу с центром в вершине фасета, цилиндр с центром на краю фасета или плоскость, параллельную внутренней части фасета. В этой модели точка P21 находится на сфере, представленной на чертеже дугой, с центром в конечной вершине V5 фасета и имеет измерение 50 расстояния. Точка P22 находится на плоскости, представленной на чертеже линией, параллельной внутренней части фасета, F4, и имеет измерение 80 расстояния. Точка P23 находится на дуге с центром во внутренней вершине V4 фасета и имеет измерение 50 расстояния; и точка P24 имеет измерение 70 расстояния и равноудалена от двух фасетов, F4 и F2.
Если сетка является разветвленной, то можно, но не требуется, задавать (специфицировать, указывать) сторону сетки, на которой лежит точка. Разветвленная сетка может использоваться, чтобы представлять лицевую поверхность сплошной детали, где одна сторона сетки находится внутри твердого (сплошного) тела и другая сторона находится вне твердого тела. Если измерение используется, чтобы задавать зазор между двумя сплошными деталями, то задание стороны гарантирует, что детали будут отделены, вместо взаимопроникновения. Фиг. 5 показывает геометрическое место точек, которые представляют собой измерение расстояния 70 от сетки 20, когда сторона была задана . P10 и P11 представляют собой примеры решенных точек, которые лежат на этом геометрическом месте точек. P9 и P12 не являются допустимыми решенными местоположениями, так как P12 решалась бы в P12’ по другую сторону сетки, и P9 решалась бы в P9’.
Между плоскостью и сеткой может применяться ряд различных типов ограничений, например, ограничения касания, ограничения касания с заданным полупространством и измерения расстояния. Линии используются, чтобы представлять плоскости на чертежах, так же как полилиния (как на фиг. 2) предназначается, чтобы представлять поверхность сетки.
Ограничение касания между плоскостью и сеткой определено, чтобы означать, что минимальное глобальное ближайшее приближение между плоскостью и сеткой равно нулю и что вся сетчатая геометрия находится на одной и той же стороне неограниченной плоскости. Этот тип ограничения может использоваться, чтобы обеспечивать, что две детали изготавливаются с корректным размером, так что плоская лицевая поверхность одной детали касается лицевой поверхности сетки другой детали. Он может также использоваться, чтобы контролировать положения двух деталей в узле. Фиг. 6 показывает некоторые примеры решенных ограничений касания между плоскостями, представленными линиями 22, 23, 24, 25, и сеткой 20. Например, можно сказать, что линия 22 касается сетки 20 вдоль фасета F3, в то время как линия 23 касается только внешней вершины V1, линия 24 касается только внешней вершины V5, и линия 25 касается внутренней вершины V4. Если в начальном положении сетка 20 лежит на обеих сторонах плоскости, то находится решение, которое минимизирует перемещение плоскости. То есть, плоскость движется к “ближайшему” решению. Аналогично, если в начальном положении сетка лежит полностью на одной стороне плоскости, то будет найдено решение, где она все еще находится на той же самой стороне. Например, на фиг. 8 минимальное расстояние между плоскостью L9 и сеткой 20 равно нулю, но части сетки лежат на обеих сторонах плоскости, так что ограничение не решается. Чтобы найти решение, плоскость можно переместить в направлении нормали либо вверх и вправо, либо вниз и влево, так обычно будет выбрано решение вверх и вправо, поскольку это требует меньшего перемещения.
Ограничение касания между планарным полупространством и сеткой дает определение, которое может опционально также задавать, какой стороной плоскости будет сетка. Для планарного полупространства, касание сетки означает, что минимальное глобальное ближайшее приближение между плоскостью и сеткой равно нулю и что вся сетчатая геометрия находится на заданной стороне плоскости. Фиг. 7 показывает некоторые примеры ограничений касания между плоскостями PL5, PL6, PL7, PL8 (представленными ограниченными линиями) и сеткой 20 и является аналогичной фиг. 6. Во всех случаях касание задано , чтобы находиться на отрицательной стороне плоскости.
Измерение расстояния между плоскостью и сеткой определяется, чтобы означать, что минимальное глобальное ближайшее приближение между плоскостью и сеткой равно значению измерения расстояния и что вся сетчатая геометрия находится на одной и той же стороне неограниченной плоскости. Такое измерение может использоваться, чтобы контролировать толщину детали путем задания расстояния между лицевой стороной сетки и планарной лицевой стороной. Оно может также использоваться, чтобы контролировать размеры или положения двух деталей путем задания зазора между ними. Фиг. 10 иллюстрирует пример этого, показывая подробности измерения между плоскостью и сеткой, где плоскость PL10 подходит не ближе, чем расстояние 30 в вершине V4 до сетки 20, содержащей фасеты F1-F4.
Определения, заданные для точек и плоскостей, могут использоваться, чтобы задавать определения других типов ограничений и измерений между сеткой и любым другим типом геометрии, включая другую сетку. Например, ограничение касания между сферой и сеткой может выводиться из измерения расстояния до точки. Значение измерения расстояния представляет собой радиус сферы, и точка задает положение центра сферы. Аналогично, измерение расстояния между сеткой и сеткой может быть выведено из расстояния от плоскости до сетки, так что измерение решается, когда глобальное минимальное расстояние между двумя сетками является тем же самым, что и значение измерения расстояния.
В вышеизложенных описаниях все ограничения решаются путем использования полной сетки. В некоторых случаях, это означает, что желательные решения невозможны. Например, фиг. 8 показывает плоскость и сетку. Однако это решение невозможно с ограничением касания, поскольку, хотя плоскость касается сетки в одном местоположении, она также пересекает ее в другом местоположении. Чтобы обеспечить возможность таких решений, определение ограничения может быть усилено, чтобы задавать поднабор целой сетки. Фиг. 9 показывает один способ, которым это можно сделать, посредством “вспомогательной сферы” 26, которая определяется положением, точкой P13 и радиусом r, так что только части сетки, которые находятся внутри этой сферы 26, рассматриваются при решении ограничения. Примером того, где это было бы применимо, является поверхность, которая имеет вогнутые и выпуклые области, создавая бугристую поверхность, а не гладкую. Из фиг. 9 можно видеть, что точка P13 не должна совпадать с сеткой 20. В дополнение к допущению локализованных решений, это также может также улучшить качество выполнения.
Некоторые более практические примеры настоящего раскрытия изложены ниже. Фиг. 11 иллюстрирует пример гибридной детали 40. При изготовлении, эта гибридная деталь взаимодействует, например, с измерительным зондом или режущим инструментом 41, который может также быть смоделирован, как показано на фиг. 12. Измерительный зонд или режущий инструмент 41 в некоторой точке при использовании подходит к гибридной детали 40 и может соответствовать фасетной лицевой стороне 42 гибридной детали, как показано на фиг. 13. Это является примером применения ограничения касания, например, как описано в отношении фиг. 6 или фиг. 7, что также требует, чтобы другая геометрия, в этом случае зонд или режущий инструмент 41, находилась на заданной стороне сетки, в этом случае гибридной детали 40.
Фиг. 14-17 представляют собой практические примеры контроля толщины детали путем задания расстояния между лицевой стороной сетки и планарной лицевой стороной. Фиг. 14 иллюстрирует другую гибридную деталь 43, и фиг. 15 иллюстрирует ту же самую гибридную деталь, но более тонкую версию 44. Это может возникать, например, где необходимо сделать деталь толще для удовлетворения заданным требованиям прочности. Гибридная деталь 43 согласно фиг. 14 спроектирована как часть сборочного узла 45, показанного на фиг. 16, где требуется, чтобы гибридная деталь 43 входила в отверстие 46 в сборочном узле. Требование может состоять в том, чтобы гибридная деталь 43 точно входила в отверстие, в этом случае может использоваться ограничение касания с плоскостью сторон отверстия 46, или может требоваться, чтобы гибридная деталь 43 входила в отверстие 46 с определенным просветом или зазором 51, 52, 53 между деталью 43 и плоскостями на каждой из сторон 47, 48, 49, 50 отверстия 46, в этом случае измерение, такое как проиллюстрированное на фиг. 10, будет использоваться, чтобы поддерживать эти зазоры. После определения зазора, в который должна входить гибридная деталь, и просветов 51, 52, 53, размеры сборочного узла могут быть переустановлены 48, как показано на фиг. 17, в то же время по-прежнему поддерживая те же самые просветы 51, 52, 53.
Приведенное выше описывает, как определяются ограничения и измерения для поверхностей сетки. Последующие абзацы описывают способ, используемый для изменения модели от исходного состояния, где ограничения не решены, до конечного состояния, где ограничения решаются.
Способ решения зависит от определения двух значений для каждого ограничения между сеткой и другой геометрией, подлежащей решению: во-первых, расстояния между сеткой и другой геометрией, и во-вторых, вектора первой производной расстояния между сеткой и другой геометрией. Определение этих значений зависит от того, касаются ли геометрии, пересекаются, или от отсутствия того и другого.
Если глобальное минимальное расстояние между сеткой и любой другой геометрией больше нуля, геометрии не пересекаются и не касаются. Расстояние берется как глобальное минимальное расстояние, и вектор первой производной расстояния представляет собой единичный вектор между ближними точками на двух геометриях.
Если глобальное минимальное расстояние равно нулю, геометрии либо пересекаются, либо касаются. Две геометрии касаются, если глобальное минимальное расстояние между ними равно нулю, но можно найти исчезающе малое изменение положения или формы геометрий, что приводит к ненулевому минимальному расстоянию. Если геометрии касаются, то расстояние равно нулю, и вектор первой производной расстояния представляет собой единичный вектор, нормальный к сетчатой геометрии в точке касания. Две геометрии пересекаются, если глобальное минимальное расстояние между ними остается нулевым для каждого исчезающе малого изменения положения или формы геометрий. Если геометрии пересекаются, расстояние принимается равным длине вектора кратчайшего относительного переноса (трансляции), так что геометрии касаются, но не пересекаются, и вектор первой производной представляет собой единичный вектор с тем же самым направлением, что и этот вектор переноса.
При задании значений расстояния и вектора первой производной расстояния для каждого ограничения, можно использовать их, чтобы найти решение. Например, для ограничения совпадения между точкой и сеткой, где точка первоначально не лежит на сетке, можно найти решение путем перемещения точки в направлении вектора первой производной на значение расстояния. Аналогичный способ может использоваться для ограничения касания между плоскостью и сеткой. Для измерения расстояния геометрию необходимо переместить на величину, равную численной разности между значением измерения и расстоянием.
Кратко говоря, в настоящем раскрытии, ограничение до сетки принимает сетку как точную поверхность, поэтому если сетка составлена из фасетов, ограничение будет измерением до внутренней части фасета (обычно плоскости), границы фасета (обычно линии) или угла фасета (точки). Сетка не аппроксимируется (например, путем подгонки к ней поверхности NURBS).
Можно найти локализованные решения для сетки путем задания (специфицирования) подобласти сетки. Один способ сделать это состоит в том, чтобы задавать (специфицировать) сферу (точку и радиус). Только те части сетки, которые лежат внутри сферы, будут рассматриваться в целях нахождения минимального расстояния. Наряду с допущением различных решений по сравнению с нахождением глобального минимума, это также улучшит качество выполнения путем уменьшения эффективного размера сетки.
Сетка не ограничена планарными фасетами. Например, сетка может представлять собой полную границу сплошной детали, составленной из фасетных лицевых сторон, планарных лицевых сторон и других лицевых сторон алгебраической геометрии. Расстояние и первая производная расстояния важны, поскольку расстояние и первая производная это все, что требуется для эффективного решения ограничения. Способ имеет преимущество общности в том, что он может применяться к любому типу сетки, такой как часть B-rep с любой геометрией лицевой поверхности. Определение расстояния и нормали поверхности приводит к стабильному решению с хорошей сходимостью.
Фиг. 18 показывает блок-схему последовательности операций примера способа в соответствии с настоящим раскрытием. Сетчатая геометрия, представляющая поверхность изделия в 3 измерениях, принимается 50 в модели системы CAD, способной представлять изделие как алгебраическую геометрию или фасетную геометрию. Ограничения, подлежащие применению к сетчатой геометрии, принимаются 51 в модели. Имеется множество различных ограничений, но одним примером является, если геометрии не пересекаются и не касаются, определение для каждого ограничения расстояния между сетчатой геометрией и любой другой геометрией как глобального минимального расстояния между сетчатой геометрией и другой геометрией; определение вектора от ближней точки на сетчатой геометрии до ближней точки на другой геометрии; и генерирование единичного вектора из направления этого вектора и использование его в качестве вектора первой производной расстояния. Другим примером является то, если геометрии касаются, но не пересекаются, что для каждого ограничения расстояние между сетчатой геометрией и другой геометрией равно нулю, и вектор первой производной расстояния представляет собой единичный вектор, нормальный к сетчатой геометрии в точке касания. Третьим примером является то, если геометрии пересекаются, но не касаются, что для каждого ограничения расстояние равно длине вектора кратчайшего относительного переноса, так что геометрии касаются, но не пересекаются, и вектор первой производной представляет собой единичный вектор с тем же самым направлением, что и этот вектор переноса.
В способе согласно настоящему раскрытию, сетчатая геометрия решается 52 как точная поверхность. Этап решения может содержать удовлетворение принятых ограничений путем определения решенного местоположения для каждого ограничения и определения для каждого ограничения расстояния из этого решенного местоположения и вектора первой производной расстояния для каждого ограничения, применяемого к сетчатой геометрии; и применение изменения на основе определенного расстояния и вектора первой производной расстояния. Обновленная модель сетчатой геометрии сохраняется 53. Сохраненная обновленная модель может использоваться для отображения 54 изображения обновленной сетчатой геометрии или генерирования 55 набора инструкций для станка с компьютерным управлением или для того и другого. Пользователю может быть желательным использовать отображенное изображение, чтобы проверить, достигли ли модификации предполагаемого результата, например, путем анализа механических свойств детали согласно проекту. Если пользователь определяет, что требуются дополнительные модификации, они могут выполняться путем повторения этапов моделирования, например, с модифицированными ограничениями и генерирования нового отображения и новых технологических инструкций. Сгенерированные технологические инструкции могут предоставляться на станок с компьютерным управлением, и часть продукта, или весь продукт, как смоделировано способом согласно раскрытию, может изготавливаться с использованием инструкций.
С использованием способа согласно настоящему раскрытию, проектирование летательного аппарата или транспортного средства может быть улучшено, и поэтому выполнение летательного аппарата или транспортного средства улучшается, в частности, за счет уменьшения веса деталей, в то же время поддерживая ту же самую прочность, что и в случае детали при традиционном проектировании.
Операционная система, включенная в систему обработки данных, позволяет отображать вывод из системы пользователю на дисплее 6 и позволяет пользователю взаимодействовать с системой. Примеры операционных систем, которые могут использоваться в системе обработки данных, могут включать в себя операционные системы Microsoft WindowsTM, LinuxTM, UNIXTM, iOSTM и AndroidTM.
К тому же, следует понимать, что система 1 обработки данных может быть реализована как в сетевой среде, распределенной системной среде, виртуальных машинах в архитектуре виртуальных машин и/или облачной среде. Например, процессор 2 и ассоциированные компоненты могут соответствовать виртуальной машине, работающей в среде виртуальных машин одного или нескольких серверов. Примеры архитектур виртуальных машин включают в себя VMware ESCi, Microsoft Hyper-V, Xen, и KVM.
Специалистам в данной области техники будет понятно, что аппаратные средства, изображенные для системы 1 обработки данных, могут меняться для конкретных реализаций. Например, система 1 обработки данных в этом примере может соответствовать компьютеру, рабочей станции и/или серверу. Однако следует понимать, что альтернативные варианты осуществления системы обработки данных могут быть сконфигурированы с соответствующими или альтернативными компонентами, например, в форме мобильного телефона, планшета, платы контроллера или любой другой системы, которая приводится в действие, чтобы обрабатывать данные и выполнять функциональность и признаки, описанные в настоящем документе, в ассоциации с работой системы обработки данных, компьютера, процессора и/или контроллера, обсужденных здесь. Изображенный пример предоставлен только для пояснения и не предназначен, чтобы налагать архитектурные ограничения в отношении настоящего раскрытия.
Система 1 обработки данных может быть соединена с сетью (не являющейся частью системы 1 обработки данных), которая может представлять собой общедоступную или частную сеть системы обработки данных или комбинацию сетей, как известно специалистам в данной области техники, включая Интернет. Система 1 обработки данных может осуществлять связь по сети с одной или несколькими другими системами обработки данных, такими как сервер (также не является частью системы 1 обработки данных). Однако альтернативная система обработки данных может соответствовать множеству систем обработки данных, реализованных как часть распределенной системы, в которой процессоры, ассоциированные с несколькими системами обработки данных, могут осуществлять связь посредством одного или нескольких сетевых соединений и могут совместно выполнять задачи, описанные как выполняемые одной системой обработки данных. Таким образом, следует понимать, что при ссылке на систему обработки данных, такая система может быть реализована на нескольких системах обработки данных, организованных в распределенной системе в коммуникации друг с другом через сеть.
Разумеется, специалистам в данной области техники должно быть понятно, что, если специально не указано или не требуется последовательностью операций, определенные этапы в процессах, описанных выше, могут быть опущены, могут выполняться одновременно или последовательно или выполняться в другом порядке.
Специалистам в данной области техники должно быть понятно, что для простоты и ясности полная структура и работа всех систем обработки данных, подходящих для использования с настоящим раскрытием, не изображена и не описана здесь. Напротив, из системы обработки данных изображено и описано только то, что является уникальным для настоящего раскрытия или необходимо для понимания настоящего раскрытия. Остальная конструкция и работа системы 1 обработки данных может быть согласована с любыми из различных современных реализаций и практик, известных в данной области техники.
Важно отметить, что в то время как раскрытие включает в себя описание в контексте полностью функциональной системы, специалистам в данной области техники должно быть понятно, что по меньшей мере части механизма настоящего раскрытия могут быть распределены в форме инструкций, содержащихся в используемом машиной, используемом компьютером или считываемом компьютером носителе в любой из множества форм, и что настоящее раскрытие применяется одинаково независимо от конкретного типа инструкции или носителя, несущего сигнал, или носителя хранения, используемого, чтобы действительно выполнять распределение. Примеры используемых/считываемых машиной или используемых/считываемых компьютером носителей включают в себя: энергонезависимые, жестко закодированные носители, такие как постоянные памяти (ROM) или стираемые электрически программируемые постоянные памяти (EEPROM), и записываемые пользователем носители, такие как флоппи-диски, накопители на жестких дисках и постоянные памяти на компакт-диске (CD-ROM) или цифровые универсальные диски (DVD).
Хотя примерный вариант осуществления настоящего раскрытия был описан подробно, специалистам в данной области техники должно быть понятно, что различные изменения, замены, вариации и усовершенствования, раскрытые здесь, могут быть осуществлены без отклонения от сущности и объема раскрытия в его самой широкой форме.
Ничто из описания в настоящей заявке не должно пониматься как подразумевающее, что какой-либо конкретный элемент, этап или функция представляет собой существенный элемент, который должен быть включен в объем формулы изобретения: объем патентуемого предмета определяется только принятыми пунктами формулы изобретения. Более того, никакие из этих пунктов формулы не имеют намерения требовать применения положений 35 USC §112(f), если за словами "средство для" не следует причастие.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ДАННЫХ | 2019 |
|
RU2715013C1 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ДАННЫХ | 2015 |
|
RU2701710C1 |
| Модель носовой перегородки и способ ее производства | 2020 |
|
RU2758082C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ ИНДИВИДУАЛЬНЫХ ИМПЛАНТАТОВ ДЛЯ ОСТЕОСИНТЕЗА ПЕРЕЛОМОВ ДЛИННЫХ ТРУБЧАТЫХ КОСТЕЙ | 2013 |
|
RU2551304C2 |
| Способ автоматизированного формообразования оболочки переменной кривизны обтяжкой листовой заготовки | 2024 |
|
RU2838191C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ТРЕХМЕРНОЙ МОДЕЛИ ДЛЯ АДДИТИВНОГО ПРОИЗВОДСТВА | 2020 |
|
RU2819300C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИИ ПОВЕРХНОСТИ СО СЛОЖНОЙ ФОРМОЙ (варианты) | 2022 |
|
RU2788828C1 |
| ИНТЕЛЛЕКТУАЛЬНОЕ РАСПОЗНАВАНИЕ СМЕЩЕНИЙ В МОДЕЛЯХ CAD | 2015 |
|
RU2658882C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ ТРЕХМЕРНЫХ МОДЕЛЕЙ ГОРОДОВ | 2017 |
|
RU2638638C1 |
| СПОСОБ ПОЭТАПНОГО ФОРМОВАНИЯ ДЕТАЛИ С ВОГНУТЫМИ И ВЫПУКЛЫМИ ПОВЕРХНОСТЯМИ | 2011 |
|
RU2515973C2 |
Изобретение относится к области вычислительной техники. Технический результат заключается в повышении точности решения ограничения, применяемого к фасетной поверхности гибридной модели, избегая дополнительных колебаний, или волнистости, которые могли бы проявляться в аппроксимации. Технический результат достигается за счет этапов, на которых: в модели системы CAD, выполненной с возможностью представлять изделие как алгебраическую геометрию или фасетную геометрию, принимают сетчатую геометрию, представляющую собой поверхность изделия в 3 измерениях; принимают ограничения, подлежащие применению к сетчатой геометрии; решают сетчатую геометрию как точную поверхность; и сохраняют обновленную модель сетчатой геометрии. 4 н. и 13 з.п. ф-лы, 18 ил.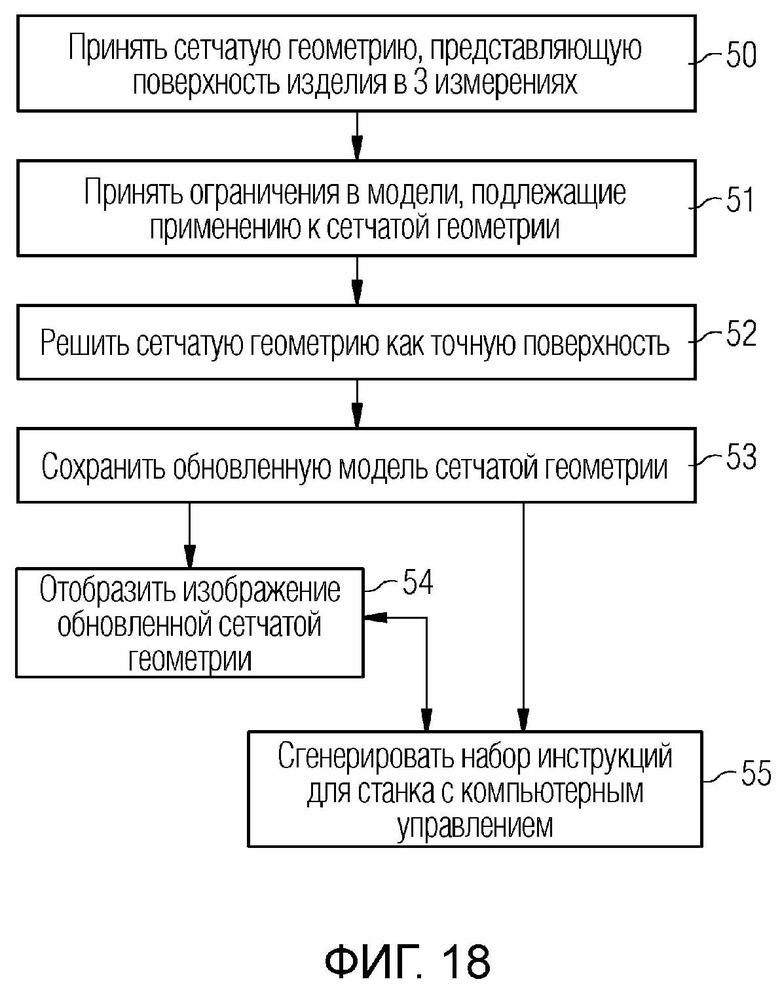
1. Способ управления моделью системы (CAD) автоматизированного проектирования для изделия, подлежащего проектированию или изготовлению,
причем способ выполняют в системе обработки данных;
при этом способ содержит этапы, на которых:
в модели системы CAD, выполненной с возможностью представлять изделие как алгебраическую геометрию или фасетную геометрию, принимают сетчатую геометрию, представляющую собой поверхность изделия в 3 измерениях;
принимают ограничения, подлежащие применению к сетчатой геометрии;
решают сетчатую геометрию как точную поверхность; и
сохраняют обновленную модель сетчатой геометрии.
2. Способ по п. 1, причем способ дополнительно содержит по меньшей мере один из этапов на которых: отображают изображение обновленной сетчатой геометрии; и генерируют набор инструкций для станка с компьютерным управлением.
3. Способ по п. 1 или 2, причем ограничения содержат по меньшей мере одно из геометрии, совпадающей с сетчатой геометрией; измерения расстояния между геометрией и сетчатой геометрией; или геометрии, касающейся сетчатой геометрии.
4. Способ по любому предшествующему пункту, причем решение содержит способ удовлетворения принятых ограничений путем определения решенного местоположения для каждого ограничения и определения для каждого ограничения расстояния от этого решенного местоположения и вектора первой производной расстояния для каждого ограничения, применяемого к сетчатой геометрии; и применение изменения на основе определенного расстояния и вектора первой производной расстояния.
5. Способ по п. 4, причем:
если геометрии не пересекаются или не касаются:
определяют для каждого ограничения расстояние между сетчатой геометрией и любой другой геометрией как глобальное минимальное расстояние между сетчатой геометрией и другой геометрией;
определяют вектор от ближней точки на сетчатой геометрии до ближней точки на другой геометрии; и
генерируют единичный вектор из направления этого вектора и используют его в качестве вектора первой производной расстояния.
6. Способ по п. 4, причем:
если геометрии касаются, но не пересекаются:
для каждого ограничения расстояние между сетчатой геометрией и другой геометрией равно нулю, и вектор первой производной расстояния представляет собой единичный вектор, нормальный к сетчатой геометрии в точке касания.
7. Способ по п. 4, причем:
если геометрии пересекаются, но не касаются:
для каждого ограничения расстояние равно длине вектора кратчайшего относительного переноса, так что геометрии касаются, но не пересекаются, и вектор первой производной представляет собой единичный вектор с тем же самым направлением, что и вектор переноса.
8. Способ по меньшей мере по п. 4, причем способ дополнительно содержит этап, на котором выбирают подобласть принятой сетчатой геометрии и выполняют вычисления расстояния и первой производной для подобласти.
9. Способ по п. 8, причем подобласть содержит одну из той части принятой сетчатой геометрии, которая лежит в пределах сферы, определенной заданным радиусом вокруг заданной точки; которая лежит в пределах прямоугольника заданного размера и местоположения; которая лежит в пределах области, идентифицированной конечным пользователем, вычерчивающим замкнутый контур на сетке; которая лежит в пределах области сетки, которая является гладкой; или которая лежит в пределах области, которая ограничена краями.
10. Способ по любому предшествующему пункту, причем геометрия содержит одно из точки, кривой, алгебраической поверхности, фасетной поверхности или сетчатой геометрии.
11. Способ по любому предшествующему пункту, причем ограничения применимы между точкой, кривой, алгебраической поверхностью, фасетной поверхностью, другой сетчатой геометрией и принятой сетчатой геометрией.
12. Способ по любому предшествующему пункту, причем сетчатая геометрия содержит одну или более точек, кривых, алгебраических поверхностей или фасетных поверхностей или их комбинации.
13. Способ по любому предшествующему пункту, причем ограничения могут приниматься от внешнего источника, извлекаться из хранилища или выводиться из геометрии в модели.
14. Способ по любому предшествующему пункту, причем способ представляет собой итерационный способ.
15. Способ изготовления детали, причем способ содержит этапы, на которых:
моделируют деталь по любому из предшествующих пунктов;
вводят обновленную сетчатую геометрию в станок с компьютерным управлением и
воссоздают ассоциированное изделие в материале с использованием станка с компьютерным управлением.
16. Система обработки данных, включающая в себя процессор и доступную память, при этом система обработки данных, в частности, сконфигурирована с возможностью выполнять этапы:
в модели системы CAD, выполненной с возможностью представлять изделие в виде алгебраической геометрии или фасетной геометрии, приема сетчатой геометрии, представляющей поверхность изделия в 3 измерениях;
приема ограничений, подлежащих применению к сетчатой геометрии;
решения сетчатой геометрии как точной поверхности; и
сохранения обновленной модели сетчатой геометрии.
17. Не-временный считываемый компьютером носитель, закодированный исполняемыми инструкциями, которые при исполнении побуждают одну или более систем обработки данных выполнять способ модифицирования модели системы автоматизированного проектирования (CAD), причем способ выполняется в системе обработки данных, при этом способ содержит:
в модели системы CAD, выполненной с возможностью представлять изделие в виде алгебраической геометрии или фасетной геометрии, прием сетчатой геометрии, представляющей поверхность изделия в 3 измерениях;
прием ограничений, подлежащих применению к сетчатой геометрии;
решение сетчатой геометрии как точной поверхности; и
сохранение обновленной модели сетчатой геометрии.
| WO 2017041214 A1, 16.03.2017 | |||
| US 20010047251 A1, 29.11.2001 | |||
| УДАЛЕННО УПРАВЛЯЕМЫЙ ЦИФРОВОЙ ПУЛЬТ НА ОСНОВЕ ВИРТУАЛЬНОГО ДРАЙВЕРА, СИСТЕМА ОБЕСПЕЧЕНИЯ УДАЛЕННЫХ ФИНАНСОВЫХ УСЛУГ С ИСПОЛЬЗОВАНИЕМ ТАКОГО ПУЛЬТА И СПОСОБ ДЛЯ ЭТОГО | 2020 |
|
RU2833326C1 |
| US 20140184599 A1, 03.07.2014 | |||
| СИСТЕМА МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ | 2013 |
|
RU2541169C2 |

