ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу аддитивного производства трехмерного объекта. В частности настоящее изобретение относится к способу определения ориентации 3D-модели, генерируемой при аддитивном производстве.
УРОВЕНЬ ТЕХНИКИ
В аддитивном производстве, 3D-объект печатается послойно посредством светового отверждения жидкой среды печати, т.е. жидкой фотоотверждаемой смолы, которая выборочно отверждается под влиянием UV излучения. В общеизвестной разновидности аддитивного производства 3D-объекты предпочтительно вытягиваются посредством платформы, в перевернутом виде, из жидкого фотоотверждаемого материала, заполняющего ванну. Специалистам в данной области техники известны также другие разновидности аддитивного производства.
В ходе 3D-печати, к 3D-объекту должны присоединяться подходящие опорные конструкции. Положения на поверхности 3D-объекта, где нужно присоединять опорные конструкции, зависят от геометрии 3D-объекта, подлежащего 3D-печати, и ориентации 3D-объекта относительно направления наращивания.
В технике в целом известно, какие точки данной геометрии требуют опорных конструкций для данной ориентации 3D-объекта. Например, в US 2015/0151492 A1 раскрыт способ генерирования опорных конструкций для аддитивно производимого 3D-объекта. Дополнительно дается ссылка P. Alexander et al., "Part orientation and build cost determination in layered manufacturing", Computer-Aided Design, vol. 30, no.5, pp. 343-356, 1998, Elsevier Science Ltd. Кроме того, в EP 2922029A2 раскрыта система визуализации трехмерной (3D) модели изделия, подлежащего печати на 3D-принтере.
После 3D-печати, очистки и теплового и/или фотохимического пост-отверждения 3D-объекта, опорные конструкции нужно удалять механически. Процесс удаления занимает много времени и потенциально приводит к изменению геометрии отпечатанного 3D-объекта, например, при удалении остатков опоры вращающимся инструментом или когда процесс удаления опоры приводит к образованию малых бороздок. Для стоматологических компонентов, например, зубных протезов, хирургических шаблонов, стоматологических моделей и пр. с высокими требованиями к качеству точности формы, последствия механической постобработки могут становиться критическими.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является преодоление недостатков уровня техники и обеспечение Способ определения ориентации 3D-модели, генерируемой устройством аддитивного производства с учетом локальных требований к качеству полученного 3D-объекта.
Эта задача достигается способом по п. 1. Зависимые пункты формулы изобретения относятся к дополнительным разработкам.
Настоящее изобретение предусматривает способ определения ориентации 3D-модели, генерируемой устройством аддитивного производства, содержащим ванна для удержания фотоотверждаемый материал и платформу для удержания 3D-объекта, соответствующего 3D-модели, причем платформа способна перемещаться относительно ванны. Способ содержит следующие этапы:
1. Задание поверхностной геометрии 3D-модели, причем поверхностная геометрия включает в себя множество сегментов  поверхности, где
поверхности, где  обозначает целое число, и
обозначает целое число, и  обозначает площадь поверхности i-го сегмента поверхности. Согласно настоящему изобретению, поверхностная геометрия 3D-модели предпочтительно представляется методом триангуляции, поскольку триангуляции удобны для вычислений. Альтернативно, можно использовать сетки других типов, отличающиеся геометрией.
обозначает площадь поверхности i-го сегмента поверхности. Согласно настоящему изобретению, поверхностная геометрия 3D-модели предпочтительно представляется методом триангуляции, поскольку триангуляции удобны для вычислений. Альтернативно, можно использовать сетки других типов, отличающиеся геометрией.
2. Назначение, либо вручную пользователем, либо автоматически, согласно компьютерной программе, один или более весовых коэффициентов  сегментам поверхности соответственно, причем весовой коэффициент
сегментам поверхности соответственно, причем весовой коэффициент  указывает степень чувствительности каждого из сегментов поверхности к эффектам, обусловленным удалением любой опорной конструкции на нем. Предпочтительно, весовой коэффициент
указывает степень чувствительности каждого из сегментов поверхности к эффектам, обусловленным удалением любой опорной конструкции на нем. Предпочтительно, весовой коэффициент  больше 1 для сегментов поверхности, которые считаются чувствительными к постобработке для удаления любой опорной конструкции, и для всех остальных сегментов поверхности, равен 1.
больше 1 для сегментов поверхности, которые считаются чувствительными к постобработке для удаления любой опорной конструкции, и для всех остальных сегментов поверхности, равен 1.
3. Задание оценочной функции
где  и
и  соответственно обозначают полярный и азимутальный углы ориентации 3D-объекта относительно направления наращивания,
соответственно обозначают полярный и азимутальный углы ориентации 3D-объекта относительно направления наращивания,  обозначает вероятность, указывающую необходимость поддержки отдельных сегментов поверхности опорной конструкцией, и суммирование, обозначенное Σ, осуществляется по всем сегментам поверхности. Оценочная функция
обозначает вероятность, указывающую необходимость поддержки отдельных сегментов поверхности опорной конструкцией, и суммирование, обозначенное Σ, осуществляется по всем сегментам поверхности. Оценочная функция  нормализуется суммарной площадью поверхности и имеет отрицательный общий знак. Можно выбирать альтернативные варианты нормализации. Например, нормализация по сумме вероятностей всех опор может обеспечивать отделение избежания опорных конструкций на чувствительных сегментах поверхности от уменьшения общего количества опорных конструкций.
нормализуется суммарной площадью поверхности и имеет отрицательный общий знак. Можно выбирать альтернативные варианты нормализации. Например, нормализация по сумме вероятностей всех опор может обеспечивать отделение избежания опорных конструкций на чувствительных сегментах поверхности от уменьшения общего количества опорных конструкций.
4. Определение ориентации 3D-модели (1) относительно платформы на основании оценочной функции путем оптимизации полярного и азимутального углов, соответственно, во избежание или для уменьшения по мере возможности опорных конструкций, присоединенных к чувствительным сегментам поверхности 3D-модели.
Главный полезный результат настоящего изобретения состоит в том, что при определении ориентации 3D-модели, подлежащей печати, положения, где опорные конструкции нужно присоединять к 3D-модели, могут подвергаться влиянию. В частности, определяя ориентацию путем оптимизации оценочной функции R, можно исключать или сокращать опорные конструкции в чувствительных сегментах поверхности 3D-модели, и вместо этого располагать их в других, нечувствительных областях. Таким образом, возможных поверхностных артефактов, обусловленных механической постобработкой, можно избежать или сокращать их число в чувствительных сегментах поверхности, и необходимость в инвестировании ручной дополнительной работы для точного удаления опорных конструкций можно устранять или снижать по мере возможности. Это позволяет пользователю не допускать образования дефектов доработанных вручную поверхностей. Еще один главный полезный результат настоящего изобретения состоит в том, что, назначая весовые коэффициенты  , также можно влиять на сам процесс удаления любой опорной конструкции. В случае стоматологических компонентов, сегменты поверхности 3D-модели, подлежащей печати, где требуется меньшая чувствительность, чем в других частях, или сегменты поверхности, где опорные конструкции удалять легче и/или быстрее, чем в других частях, или сегменты поверхности, где ожидается меньшее повреждение от ручной постобработки, чем в других частях, легко идентифицировать и учитывать при назначении весовых коэффициентов . Еще один главный полезный результат настоящего изобретения состоит в том, что этапы способа обеспечивают, благодаря оценочной функции на основании весовых коэффициентов , автоматический алгоритм во избежание присоединения опорных конструкций в таких положениях, которые, по сравнению с другими положениями 3D-модели, подлежащей печати, имеют увеличенную необходимость в защите от отрицательных результатов механической постобработки. Таким образом, пользователь освобождается от необходимости вручную ориентировать 3D-объекта и/или размещения опорных конструкций. Ручная манипуляция размещения опорных конструкций требует опыта пользователя, и возможна лишь в ограниченной степени и, таким образом, может увеличивать опасность опечаток. Поэтому еще один главный полезный результат настоящего изобретения состоит в том, что можно уменьшить опасность опечаток.
, также можно влиять на сам процесс удаления любой опорной конструкции. В случае стоматологических компонентов, сегменты поверхности 3D-модели, подлежащей печати, где требуется меньшая чувствительность, чем в других частях, или сегменты поверхности, где опорные конструкции удалять легче и/или быстрее, чем в других частях, или сегменты поверхности, где ожидается меньшее повреждение от ручной постобработки, чем в других частях, легко идентифицировать и учитывать при назначении весовых коэффициентов . Еще один главный полезный результат настоящего изобретения состоит в том, что этапы способа обеспечивают, благодаря оценочной функции на основании весовых коэффициентов , автоматический алгоритм во избежание присоединения опорных конструкций в таких положениях, которые, по сравнению с другими положениями 3D-модели, подлежащей печати, имеют увеличенную необходимость в защите от отрицательных результатов механической постобработки. Таким образом, пользователь освобождается от необходимости вручную ориентировать 3D-объекта и/или размещения опорных конструкций. Ручная манипуляция размещения опорных конструкций требует опыта пользователя, и возможна лишь в ограниченной степени и, таким образом, может увеличивать опасность опечаток. Поэтому еще один главный полезный результат настоящего изобретения состоит в том, что можно уменьшить опасность опечаток.
Согласно настоящему изобретению, ориентация 3D-модели, подлежащей печати, определяется посредством оптимизации оценочной функции . Таким образом, при оптимальной ориентации 3D-модели, оценочные функции должны иметь экстремум. При отрицательном общем алгебраическом знаке оценочной функции R, весовые коэффициенты  для чувствительных сегментов поверхности и равны единице в противном случае и положительные значения
для чувствительных сегментов поверхности и равны единице в противном случае и положительные значения  вероятности, как указано выше, оптимальная ориентация задается максимумом оценочной функции . Таким образом, настоящее изобретение предусматривает точное алгоритмическое решение для нахождения оптимизированной ориентации относительно защиты сегментов поверхности, которые чувствительны к отрицательным результатам механического удаления присоединенных к ним опорных конструкций.
вероятности, как указано выше, оптимальная ориентация задается максимумом оценочной функции . Таким образом, настоящее изобретение предусматривает точное алгоритмическое решение для нахождения оптимизированной ориентации относительно защиты сегментов поверхности, которые чувствительны к отрицательным результатам механического удаления присоединенных к ним опорных конструкций.
В общем случае, когда сегменты поверхности c более высокой степенью чувствительности ориентированы в направлении от платформы наращивания или под малыми углами относительно направления наращивания, то размещения опорных конструкции на таких сегментах поверхности можно избежать или сокращать их число по мере возможности. Такой принцип можно реализовать в настоящем изобретении посредством нескольких разных оценочных функций R, которую можно использовать для определения оптимальной ориентации 3D-модели. Согласно варианту осуществления, вероятности , указывающие необходимость поддержки отдельных сегментов поверхности опорной конструкцией оцениваются путем проецирования сегментов поверхности на плоскость, параллельную платформе наращивания:

где  обозначает вектор нормали i-го сегмента поверхности, и обозначают полярный и азимутальный углы ориентации 3D-модели, соответственно,
обозначает вектор нормали i-го сегмента поверхности, и обозначают полярный и азимутальный углы ориентации 3D-модели, соответственно,  обозначает единичный вектор перпендикулярный к платформе, т.е. в направлении наращивания, “
обозначает единичный вектор перпендикулярный к платформе, т.е. в направлении наращивания, “  ” обозначает скалярное произведение. При такой оценке вероятностей опоры, оценочная функция задается как
” обозначает скалярное произведение. При такой оценке вероятностей опоры, оценочная функция задается как
в альтернативном варианте осуществления,

и
где  обозначает максимальное из двух значений
обозначает максимальное из двух значений  , и
, и  - действительнозначный показатель степени.
- действительнозначный показатель степени.
Настоящее изобретение также предусматривает компьютерную программу, компьютерно-читаемый коды которой предписывают модулю CAM осуществлять этапы способа. Настоящее изобретение также предусматривает компьютерно-читаемый носитель данных, где хранится компьютерная программа.
В настоящем изобретении, компьютерная программа предусматривает средство для осуществления этапа назначения, когда весовые коэффициенты назначаются каждому из сегментов поверхности. В первом варианте осуществления, назначение осуществляется вручную пользователем посредством маркировки, на дисплее 3D-модели, одного или более сегментов поверхности, соответственно, желаемыми весовыми коэффициентами . В другом варианте осуществления, назначение весовых коэффициентов осуществляется программным обеспечением CAD, которое использовалось для проектирования 3D-модели, подлежащей печати. В процессе проектирования, функция разных участков поверхности модели может быть общеизвестной, и назначенные весовые коэффициенты могут выбираться согласно функции соответствующего сегмента поверхности, соответствующего этому участку. Например, в стоматологических применениях, участки зубных протезов, важные для правильной подгонки для восстановления зубного ряда, можно идентифицировать в процессе проектирования, и им можно назначать высокую чувствительность к эффектам, обусловленным удалением любой опорной конструкции на них.
В предпочтительном варианте осуществления, компьютерная программа использует нейронную сеть для автоматизации этапа назначения, где весовые коэффициенты назначаются каждому из сегментов поверхности. В таком варианте осуществления нейронная сеть может использоваться для классификации характерных участков 3D-модели на основании их локальной поверхностной геометрии. Например, если 3D-модель представляет стоматологическую работающую модель, подходящими метками характерных участков могут быть зуб, десна, зубная альвеола и т.д. На основании этой классификации подходящие весовые коэффициенты могут назначаться сегментам поверхности, принадлежащим некоторому характерному участку. В предыдущем примере стоматологической работающей модели, возможным подходящим назначением будет большой коэффициент, соответствующий высокой чувствительности для сегментов, принадлежащим участкам "зуб", и коэффициент  , соответствующий отсутствию чувствительности для сегментов, принадлежащим участками "зубная альвеола". Например, нейронная сеть может обучаться 3D-моделями, где характерные участки идентифицируются либо вручную пользователем, либо согласно программе CAD.
, соответствующий отсутствию чувствительности для сегментов, принадлежащим участками "зубная альвеола". Например, нейронная сеть может обучаться 3D-моделями, где характерные участки идентифицируются либо вручную пользователем, либо согласно программе CAD.
Краткое описание чертежей
В нижеследующем описании, дополнительные аспекты и полезные результаты настоящего изобретения будут более подробно описаны с использованием иллюстративных вариантов осуществления и со ссылкой на чертежи, в которых
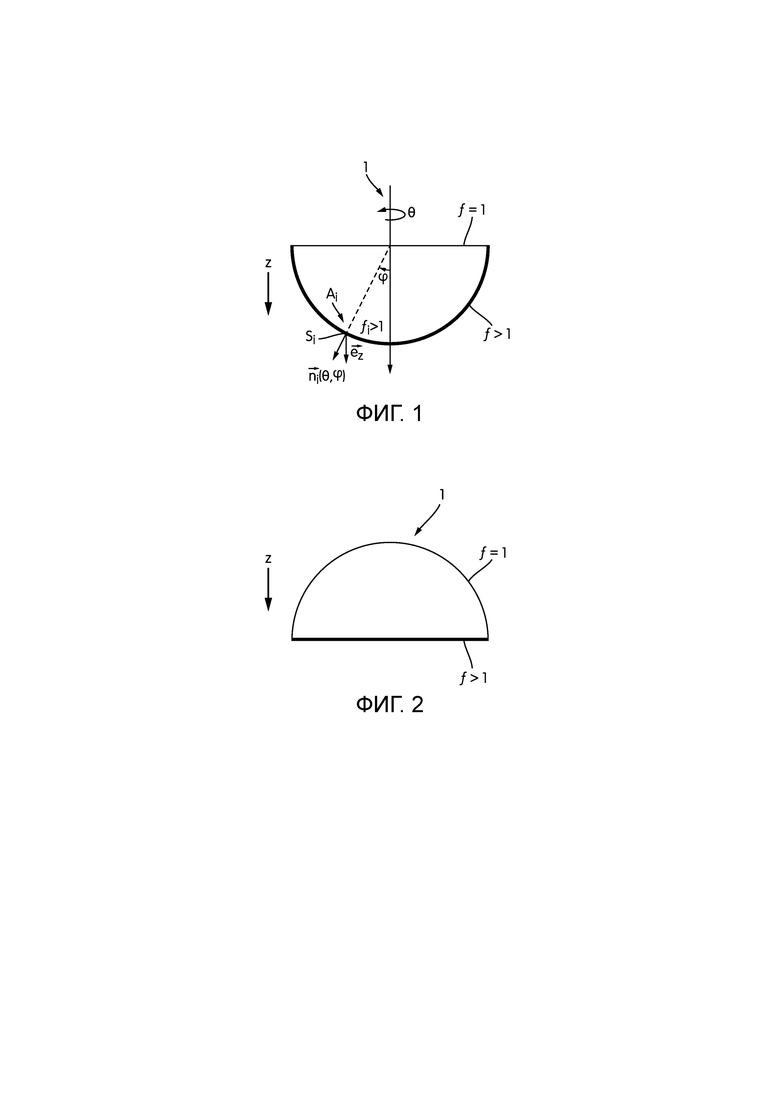
фиг. 1 - схематический вертикальный вид в разрезе полусферы в качестве 3D-модели согласно варианту осуществления, причем искривленной поверхности, указанной жирной линией, которая считается чувствительной к постобработке, назначен весовой коэффициент ;
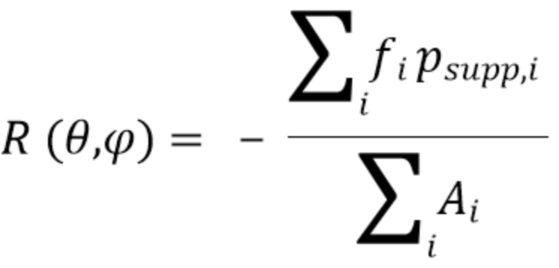
фиг. 2 - схематический вертикальный вид в разрезе полусферы в качестве 3D-модели согласно альтернативному варианту осуществления, причем плоской поверхности, указанной жирной линией, которая считается чувствительной к постобработке, назначен весовой коэффициент .
Ссылочные позиции, показанные в чертежах, обозначают элементы, которые перечислены ниже и будут упомянуты в нижеследующем описании иллюстративных вариантов осуществления:
1. 3D-модель
: целое число
 : сегмент поверхности
: сегмент поверхности
: i-й сегмент поверхности
: весовой коэффициент,
: весовой коэффициент, назначенный i-му сегменту поверхности
: площадь поверхности i-го сегмента поверхности
 : оценочная функция
: оценочная функция
 полярный угол
полярный угол
: азимутальный угол
: вектор нормали i-го сегмента поверхности
 : единичный вектор в вертикальном направлении.
: единичный вектор в вертикальном направлении.
На фиг. 1 показан схематический вертикальный вид в разрезе полусферы в качестве 3D-модели (1), ориентация которой определяется посредством способа согласно варианту осуществления настоящего изобретения.
На этапе задания способа, первоначально задается поверхностная геометрия 3D-модели (1). Поверхностная геометрия включает в себя множество сегментов поверхности, где - целое число. Поверхностная геометрия 3D-модели (1) предпочтительно представляется методом триангуляции, где i-й сегмент поверхности является треугольником (не показан) с площадью поверхности . На дополнительном этапе задания оценочная функция задается таким образом, что
Оценочная функция зависит от весовых коэффициентов  , которые указывают степень чувствительности сегментов поверхности соответственно к эффектам, обусловленным удалением любой опорной конструкции, и от , который обозначает вероятность того, что сегмент поверхности будет нуждаться в поддержке опорной конструкцией. Суммирование, обозначенное Σ, осуществляется по всем сегментам поверхности.
, которые указывают степень чувствительности сегментов поверхности соответственно к эффектам, обусловленным удалением любой опорной конструкции, и от , который обозначает вероятность того, что сегмент поверхности будет нуждаться в поддержке опорной конструкцией. Суммирование, обозначенное Σ, осуществляется по всем сегментам поверхности.
Как показано на фиг. 1, всей искривленной поверхности, указанной жирной линией, которая считается чувствительной к постобработке, назначен весовой коэффициент . Плоской поверхности назначен весовой коэффициент  . На этапе определения, ориентация 3D-модели (1) определяется относительно направления наращивания на основании оценочной функции с назначенными весовыми коэффициентами . На фиг. 1 полусфера, т.е. 3D-модель (1) ориентирована в оптимальном направлении, для которого достигает максимума. 3D-модель (1) может генерироваться устройством аддитивного производства (не показано). Устройство аддитивного производства имеет ванну для удержания фотоотверждаемого материала, и платформу для удержания 3D-объекта, соответствующего 3D-модели (1). Платформа способна перемещаться относительно ванны. При генерации 3D-модели (1) устройством аддитивного производства все опорные конструкция будут располагаться на плоской поверхности, и, таким образом, искривленная поверхность будет защищена от эффектов, обусловленных механическим удалением опорных конструкций.
. На этапе определения, ориентация 3D-модели (1) определяется относительно направления наращивания на основании оценочной функции с назначенными весовыми коэффициентами . На фиг. 1 полусфера, т.е. 3D-модель (1) ориентирована в оптимальном направлении, для которого достигает максимума. 3D-модель (1) может генерироваться устройством аддитивного производства (не показано). Устройство аддитивного производства имеет ванну для удержания фотоотверждаемого материала, и платформу для удержания 3D-объекта, соответствующего 3D-модели (1). Платформа способна перемещаться относительно ванны. При генерации 3D-модели (1) устройством аддитивного производства все опорные конструкция будут располагаться на плоской поверхности, и, таким образом, искривленная поверхность будет защищена от эффектов, обусловленных механическим удалением опорных конструкций.
На фиг. 2 показан схематический вертикальный вид в разрезе полусферы в качестве 3D-модели (1) согласно альтернативному варианту осуществления. В этом альтернативном варианте осуществления искривленной поверхности, указанной жирной линией, назначен весовой коэффициент . Плоской поверхности назначен весовой коэффициент , которая считается чувствительной к эффектам, обусловленным механическим удалением опорных конструкций. На фиг. 2 полусфера, т.е. 3D-модель (1), ориентирована в оптимальном направлении, для которого достигает максимума. При генерации 3D-модели (1) устройством аддитивного производства все опорные конструкция будут располагаться на искривленной поверхности, и, таким образом, плоская поверхность будет защищена от механической постобработки.
Два вышеуказанных иллюстративных варианта осуществления на фиг. 1 и фиг. 2 были выбраны для демонстрации изобретения с использованием относительно простой 3D-модели (1). Конечно, способ легко применять к более сложным геометриям наподобие зубных протезов и пр.
Изобретение относится к способу аддитивного производства трехмерного объекта. Техническим результатом является повышение точности формы полученного 3D-объекта за счет уменьшения количества опорных конструкций в чувствительных сегментах поверхности. Технический результат достигается тем, что в заявленном решении определяют ориентацию 3D-модели, генерируемой устройством аддитивного производства, платформа для удержания 3D-объекта выполнена с возможностью относительного перемещения относительно ванны, решение содержит этапы, на которых: задают поверхностную геометрию 3D-модели, причем поверхностная геометрия включает в себя множество сегментов поверхности, назначают один или более весовых коэффициентов сегментам поверхности, причем весовой коэффициент указывает степень чувствительности каждого из сегментов поверхности к эффектам, обусловленным механическим удалением любой опорной конструкции на нем, задают оценочную функцию; определяют ориентацию 3D-модели относительно направления построения на основании оценочной функции путем оптимизации полярного и азимутального углов. 2 н. и 4 з.п. ф-лы, 2 ил.
1. Способ определения ориентации 3D-модели (1), генерируемой устройством аддитивного производства, содержащим: ванну для удержания фотоотверждаемого материала; и платформу для удержания 3D-объекта, соответствующего 3D-модели (1), причем платформа выполнена с возможностью относительного перемещения относительно ванны, причем способ содержит этап, на котором:
задают поверхностную геометрию 3D-модели (1), причем поверхностная геометрия включает в себя множество сегментов  поверхности, где
поверхности, где  обозначает целое число, а
обозначает целое число, а  обозначает площадь поверхности i-го сегмента поверхности;
обозначает площадь поверхности i-го сегмента поверхности;
отличающийся тем, что дополнительно содержит этапы, на которых:
назначают либо вручную пользователем, либо автоматически согласно компьютерной программе один или более весовых коэффициентов  сегментам поверхности соответственно, причем весовой коэффициент
сегментам поверхности соответственно, причем весовой коэффициент  указывает степень чувствительности каждого из сегментов поверхности к эффектам, обусловленным механическим удалением любой опорной конструкции на нем, причем весовой коэффициент
указывает степень чувствительности каждого из сегментов поверхности к эффектам, обусловленным механическим удалением любой опорной конструкции на нем, причем весовой коэффициент  больше 1 для сегментов поверхности, которые считаются чувствительными к эффектам, обусловленным механическим удалением любой опорной конструкции, и для всех остальных сегментов поверхности равен 1;
больше 1 для сегментов поверхности, которые считаются чувствительными к эффектам, обусловленным механическим удалением любой опорной конструкции, и для всех остальных сегментов поверхности равен 1;
задают оценочную функцию
 ,
,
где  и
и  соответственно обозначают полярный и азимутальный углы 3D-объекта относительно направления построения,
соответственно обозначают полярный и азимутальный углы 3D-объекта относительно направления построения, 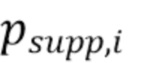 обозначает вероятность, указывающую необходимость поддержки отдельных сегментов поверхности опорной конструкцией, а суммирование, обозначенное Σ, осуществляется по всем сегментам поверхности; и
обозначает вероятность, указывающую необходимость поддержки отдельных сегментов поверхности опорной конструкцией, а суммирование, обозначенное Σ, осуществляется по всем сегментам поверхности; и
определяют ориентацию 3D-модели (1) относительно направления построения на основании оценочной функции  путем оптимизации полярного и азимутального углов и , соответственно, во избежание или для уменьшения по мере возможности необходимости опорных конструкций в чувствительных сегментах поверхности 3D-модели.
путем оптимизации полярного и азимутального углов и , соответственно, во избежание или для уменьшения по мере возможности необходимости опорных конструкций в чувствительных сегментах поверхности 3D-модели.
2. Способ по п. 1, отличающийся тем, что в оценочной функции

где  обозначает вектор нормали i-го сегмента поверхности,
обозначает вектор нормали i-го сегмента поверхности,  обозначает единичный вектор в вертикальном направлении, перпендикулярный к платформе и указывающий в направлении наращивания, “
обозначает единичный вектор в вертикальном направлении, перпендикулярный к платформе и указывающий в направлении наращивания, “ ” обозначает скалярное произведение.
” обозначает скалярное произведение.
3. Способ по п. 1 или 2, отличающийся тем, что поверхностную геометрию 3D-модели (1) представляют методом триангуляции, где i-й сегмент  поверхности является треугольником с площадью поверхности.
поверхности является треугольником с площадью поверхности.
4. Способ по любому из пп. 1-3, отличающийся тем, что этап назначения осуществляют вручную пользователем посредством маркировки на дисплее 3D-модели (1) одного или более сегментов поверхности соответственно с весовыми коэффициентами .
5. Способ по любому из пп. 1-3, отличающийся тем, что этап назначения осуществляют согласно компьютерной программе, которая содержит нейронную сеть, обученную классифицировать участки 3D-моделей на основании их локальной поверхностной геометрии, и назначает весовые коэффициенты сегментам поверхности на основании классификации участка.
6. Компьютерно-читаемый носитель данных, на котором хранится компьютерная программа, содержащая компьютерно-читаемые коды, предписывающие модулю CAD осуществлять этапы способа по любому из пп. 1-5.
| EP 2922029 A2, 23.09.2015 | |||
| US 2016250810 A1, 01.09.2016 | |||
| БАЛЯКИН А.В | |||
| "Анализ параметров процесса POLYJET для изготовления мастер-моделей с помощью планирования эксперимента", 2018, найдено в: https://s.top-technologies.ru/pdf/2018/8/37113.pdf | |||
| ZHANLI LI et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

