Область техники
[0001]
Настоящее изобретение относится к способу прогнозирования поведения транспортного средства и устройству прогнозирования поведения транспортного средства.
Уровень техники
[0002]
Известны способы, которые сообщают водителю в рассматриваемом транспортном средстве вспомогательную информацию относительно встречного транспортного средства, движущегося впереди рассматриваемого транспортного средства, когда рассматриваемое транспортное средство поворачивает направо на перекрестке (Патентный документ 1). Изобретение, раскрытое в Патентном документе 1, определяет уровни слепых зон в зависимости от того, в какой степени следующее позади транспортное средство, движущееся за встречным транспортным средством (впереди идущим транспортным средством), едущим прямо по встречной дороге, входит в слепую зону, в соответствии с соотношением между типом впереди идущего транспортного средства и типом следующего позади транспортного средства. Изобретение, раскрытое в Патентном документе 1, сообщает водителю вспомогательную информацию в соответствии с уровнем определенной слепой зоны.
СПИСОК ЛИТЕРАТУРЫ
Патентная литература
[0003]
Патентный документ 1: Находящаяся на рассмотрении патентная заявка Японии № 2011-90582
Сущность изобретения
Техническая проблема
[0004]
Изобретение, раскрытое в Патентном документе 1, при определении уровней слепых зон в зависимости от того, в какой степени следующее позади транспортное средство входит в слепую зону, вызванную впереди идущим транспортным средством, не учитывает прогнозирование курса, который может принять следующее позади транспортное средство. Проблема изобретения, раскрытая в Патентном документе 1, в котором не предлагается прогнозировать курс, который может принять следующее позади транспортное средство, таким образом, должна быть решена, так как прогнозирование курса следующего позади транспортного средства может способствовать плавному движению рассматриваемого транспортного средства. Кроме того, прогнозирование курса следующего позади транспортного средства, которое способствует плавному движению рассматриваемого транспортного средства, должно выполняться на ранней стадии.
[0005]
Ввиду вышеизложенной проблемы настоящее изобретение обеспечивает способ прогнозирования поведения транспортного средства и устройство прогнозирования поведения транспортного средства, способные прогнозировать курс движущегося объекта, движущегося спереди или сбоку от рассматриваемого транспортного средства, на ранней стадии.
Техническое решение
[0006]
Способ прогнозирования поведения транспортного средства согласно аспекту настоящего изобретения обнаруживает положение объекта относительно рассматриваемого транспортного средства, расположенного впереди или сбоку от рассматриваемого транспортного средства, и обнаруживает движущийся объект, который осуществляет движение дальше, чем упомянутый объект, от рассматриваемого транспортного средства. Способ прогнозирования поведения транспортного средства предполагает период доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект входит в область слепой зоны, в случае, когда движущийся объект движется по предварительно определенному курсу после обнаружения. Способ прогнозирования поведения транспортного средства сравнивает предполагаемый период доступности обнаружения с фактическим периодом доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект фактически входит в область слепой зоны, и прогнозирует курс движущегося объекта в соответствии с результатом сравнения.
Полезные эффекты
[0007]
Настоящее изобретение может прогнозировать курс движущегося объекта, движущегося спереди или сбоку от рассматриваемого транспортного средства, на ранней стадии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
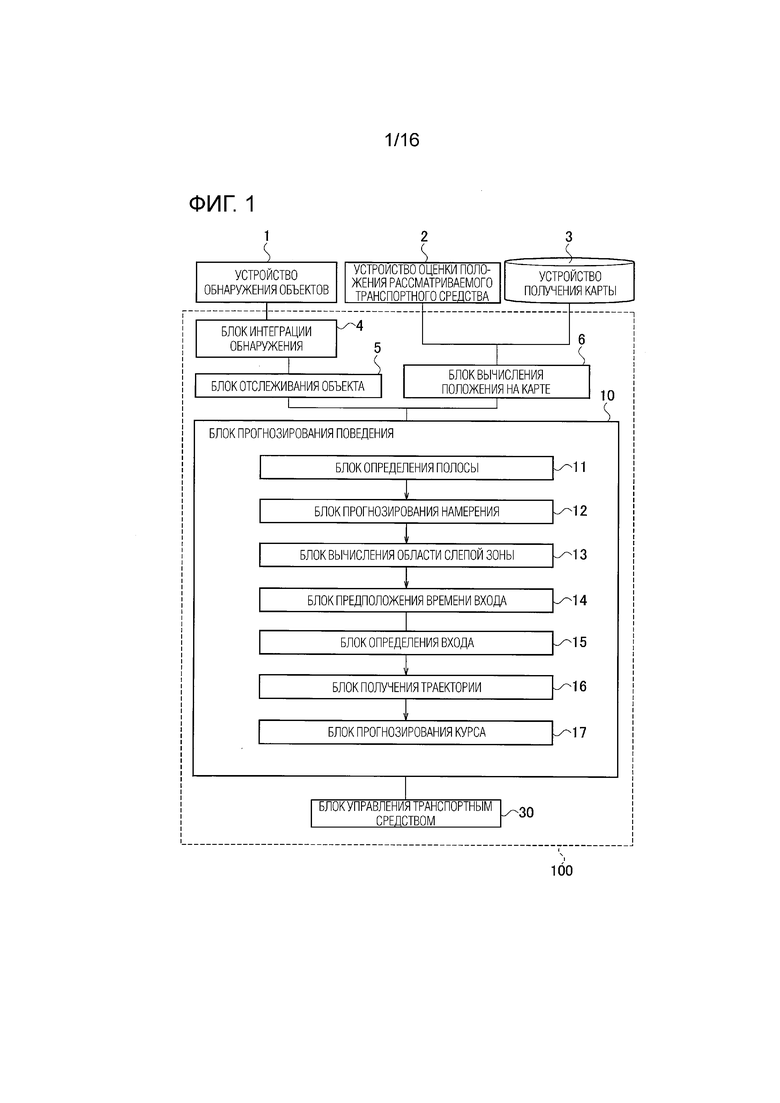
[Фиг. 1] Фиг. 1 - схематическая диаграмма конфигурации, иллюстрирующая устройство прогнозирования поведения транспортного средства согласно варианту осуществления настоящего изобретения.
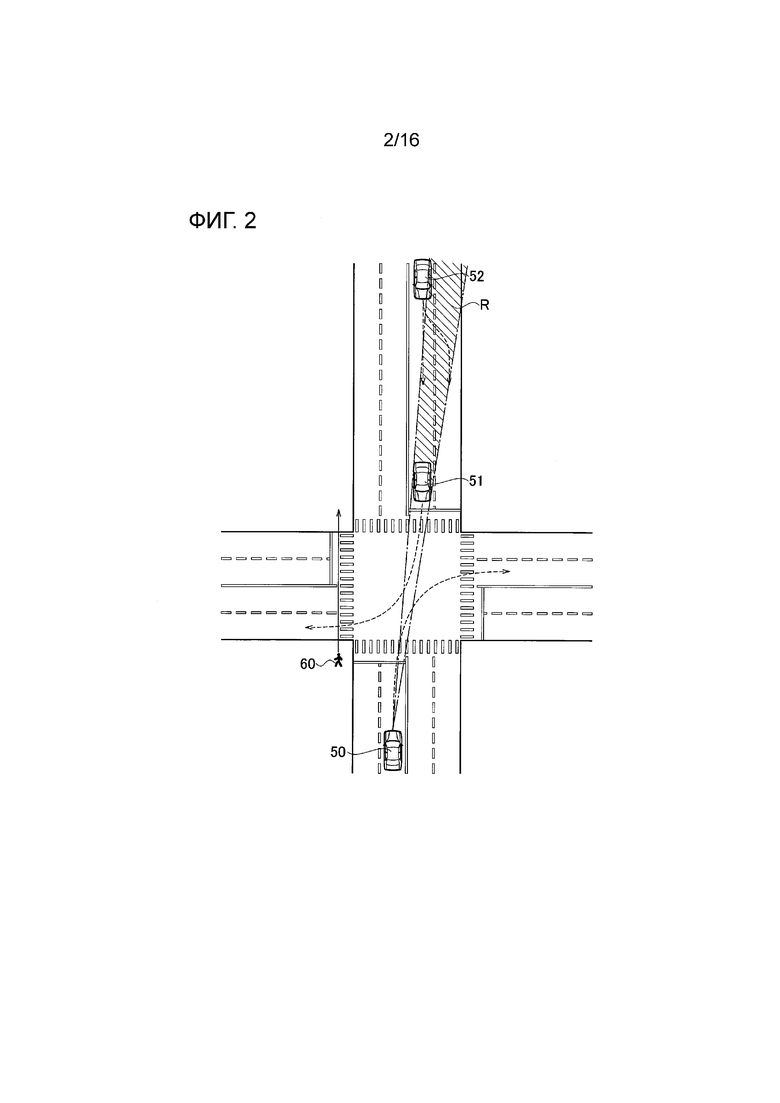
[Фиг. 2] Фиг. 2 - схема, поясняющая один пример (перекресток) способа прогнозирования курса для движущегося объекта.
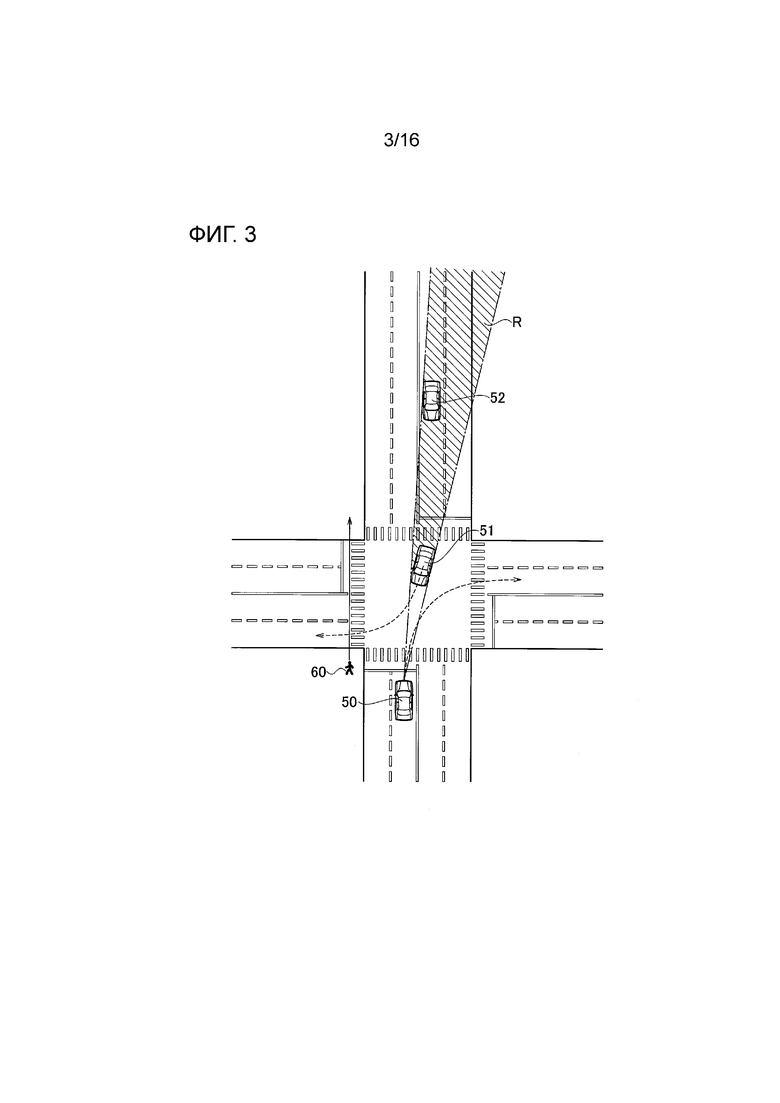
[Фиг. 3] Фиг. 3 - схема, поясняющая один пример (перекресток) способа прогнозирования курса для движущегося объекта.
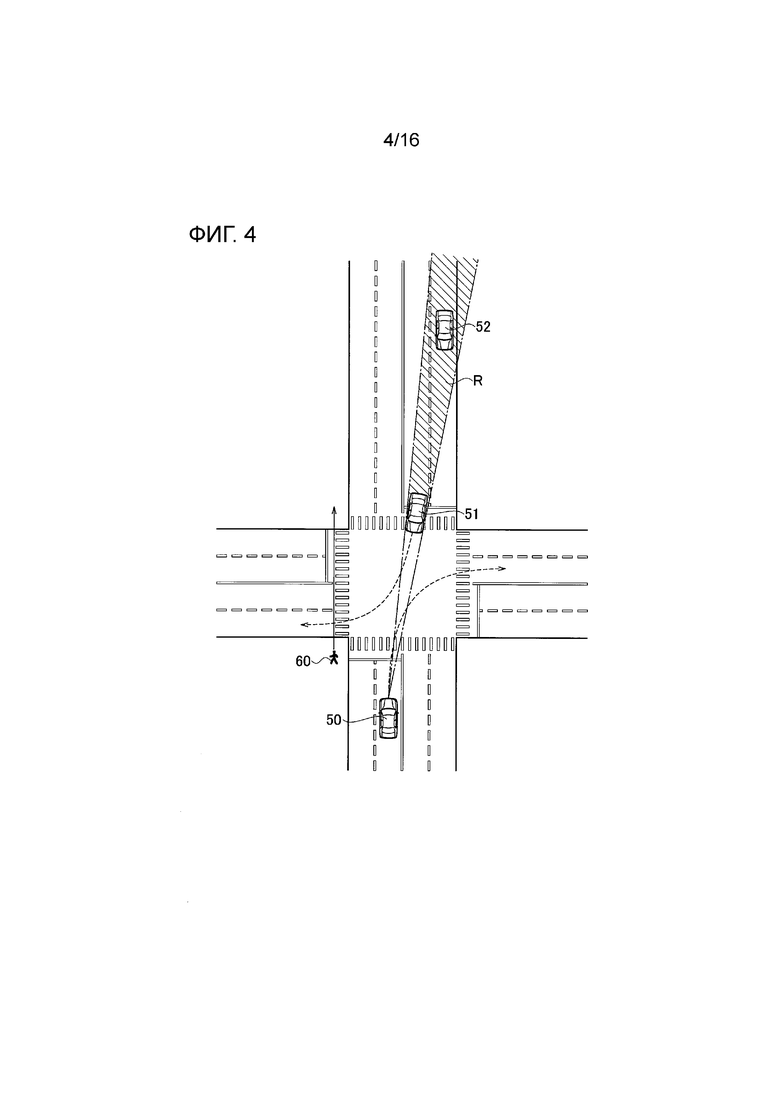
[Фиг. 4] Фиг. 4 - схема, поясняющая один пример (перекресток) способа прогнозирования курса для движущегося объекта.
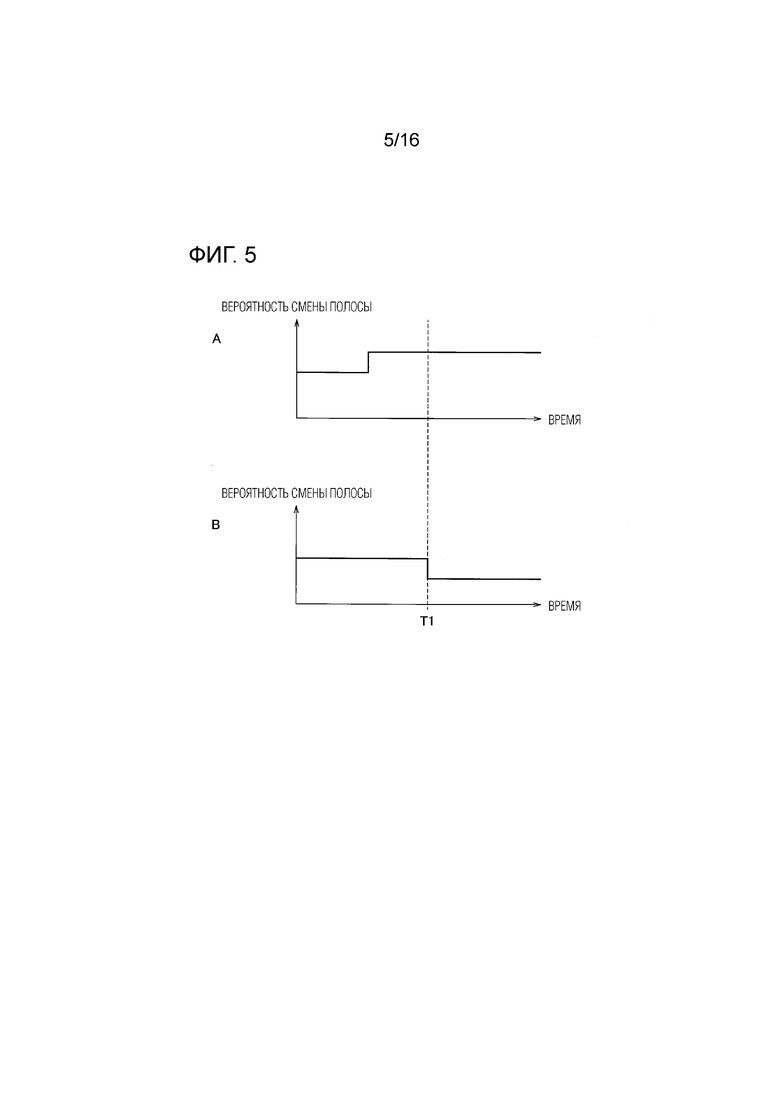
[Фиг. 5] Фиг. 5 представляет собой схему, поясняющую увеличение или уменьшение вероятности смены полосы движения.
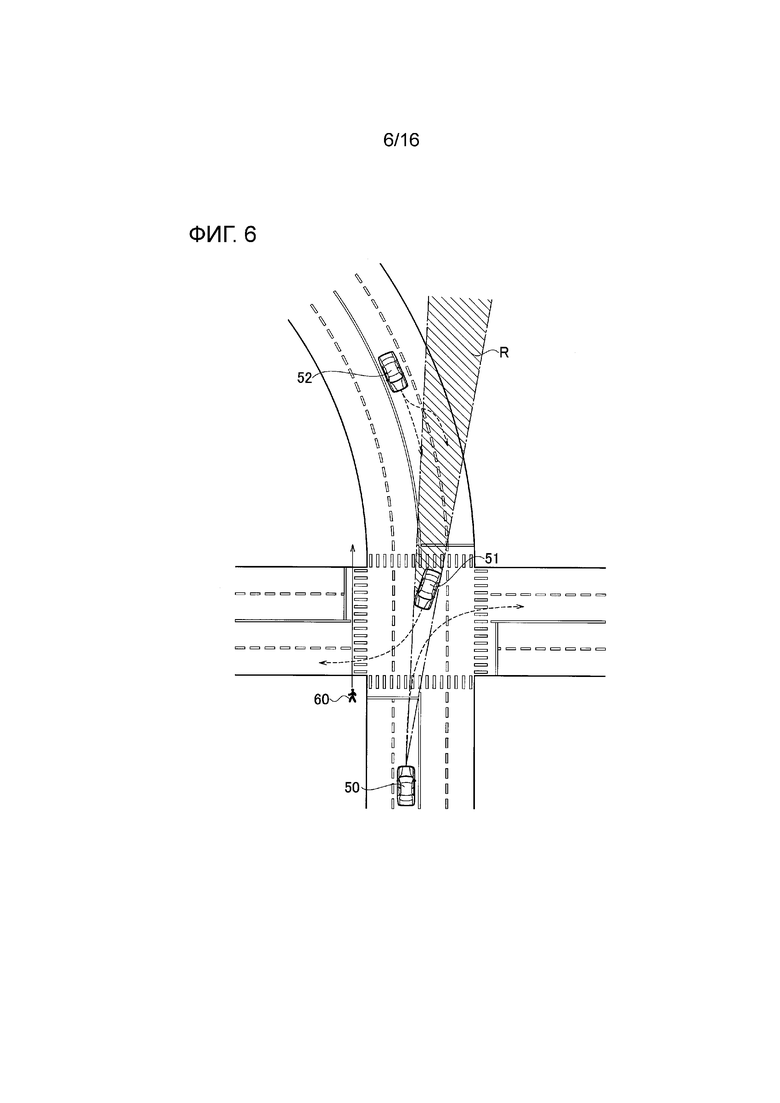
[Фиг. 6] Фиг. 6 - схема, поясняющая один пример (кривая) способа прогнозирования курса для движущегося объекта.
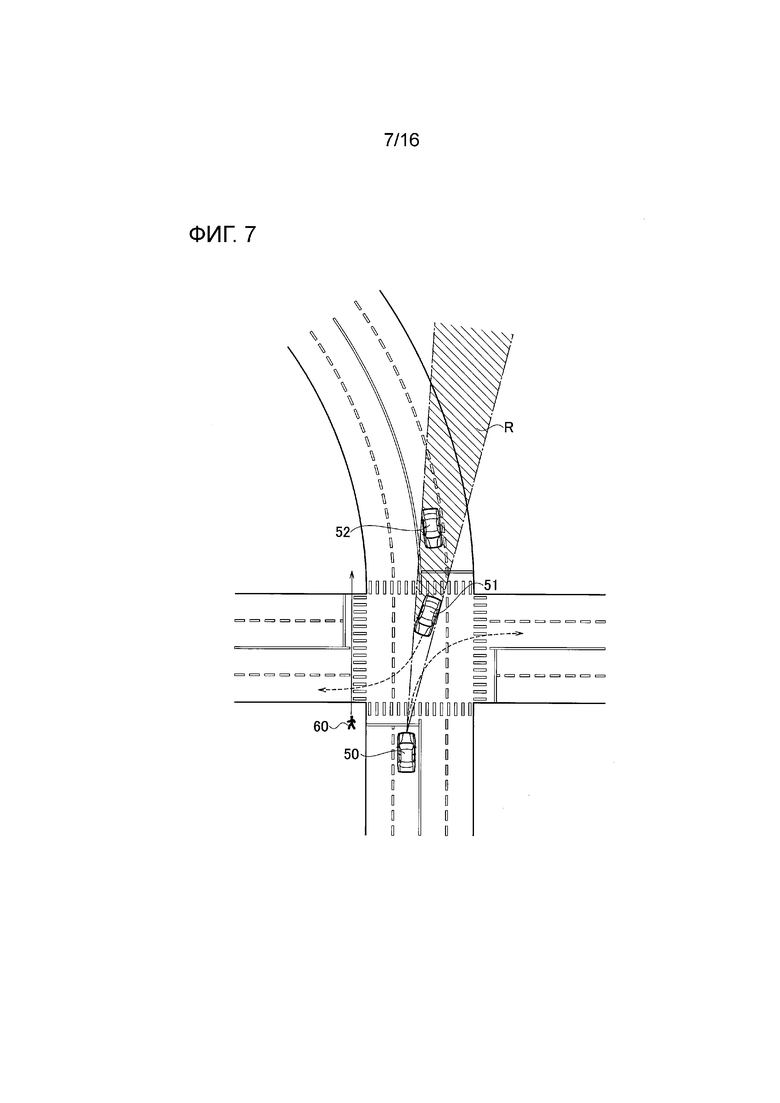
[Фиг. 7] Фиг. 7 - схема, поясняющая один пример (кривая) способа прогнозирования курса для движущегося объекта.
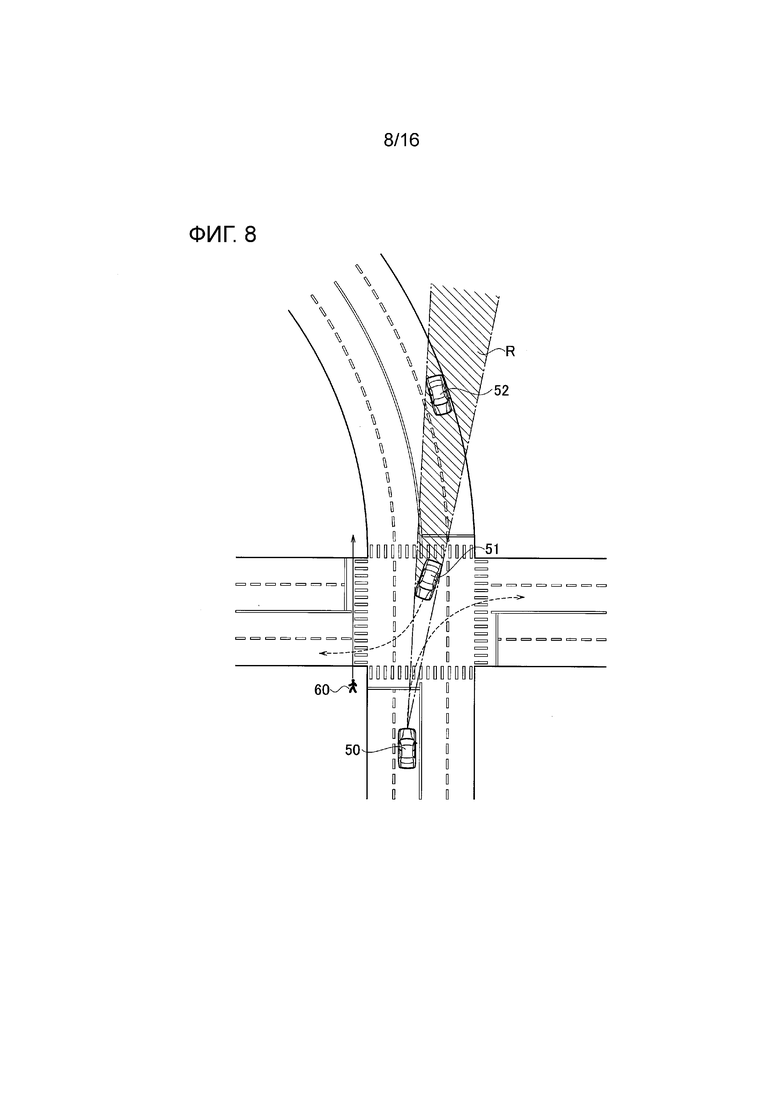
[Фиг. 8] Фиг. 8 - схема, поясняющая один пример (кривая) способа прогнозирования курса для движущегося объекта.
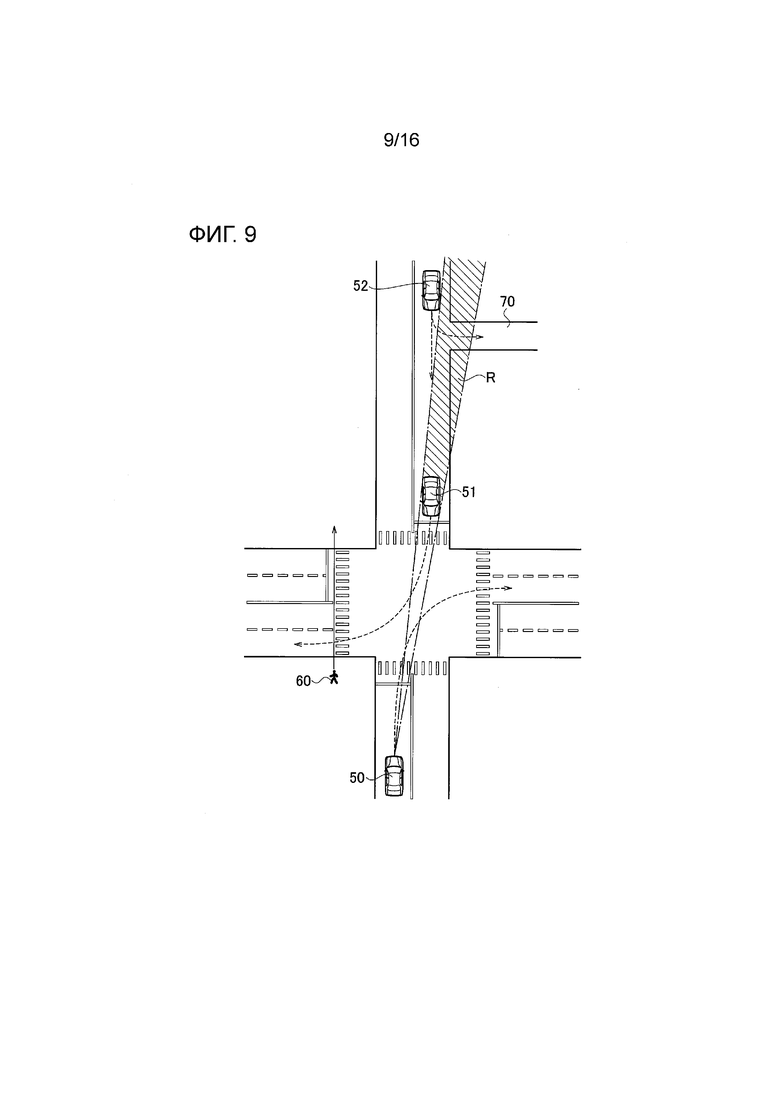
[Фиг. 9] Фиг. 9 - схема, поясняющая один пример (примыкающая дорога) способа прогнозирования курса для движущегося объекта.
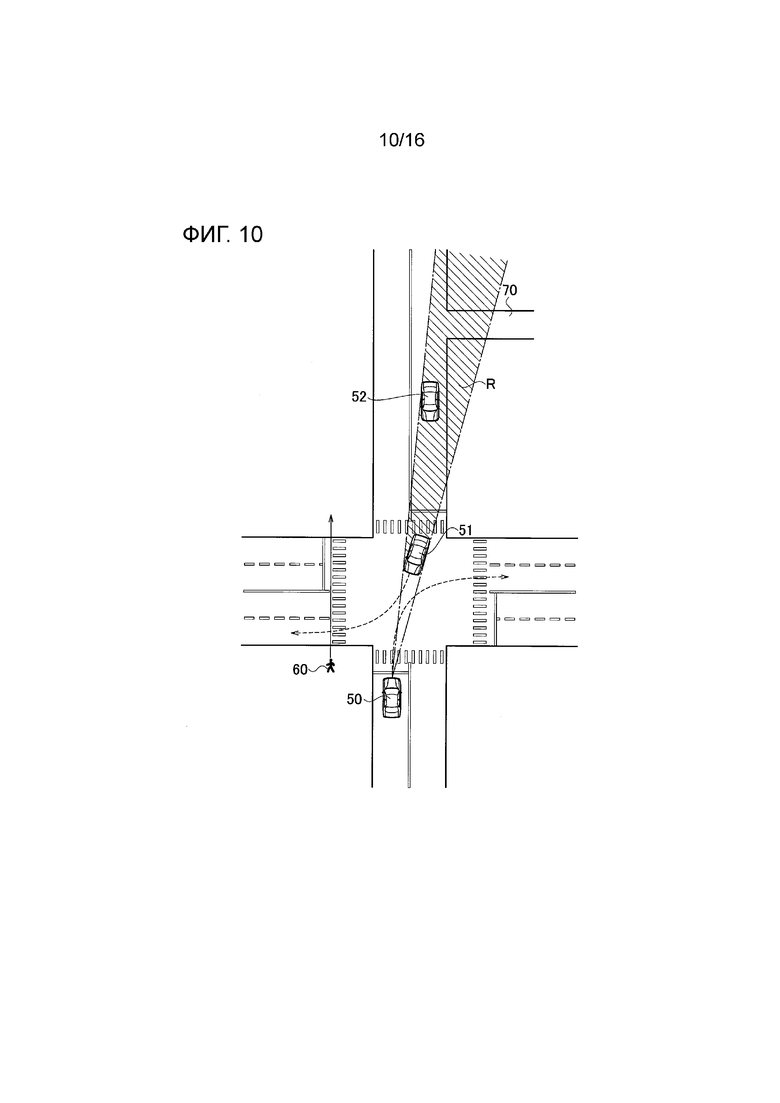
[Фиг. 10] Фиг. 10 - схема, поясняющая один пример (примыкающая дорога) способа прогнозирования курса для движущегося объекта.
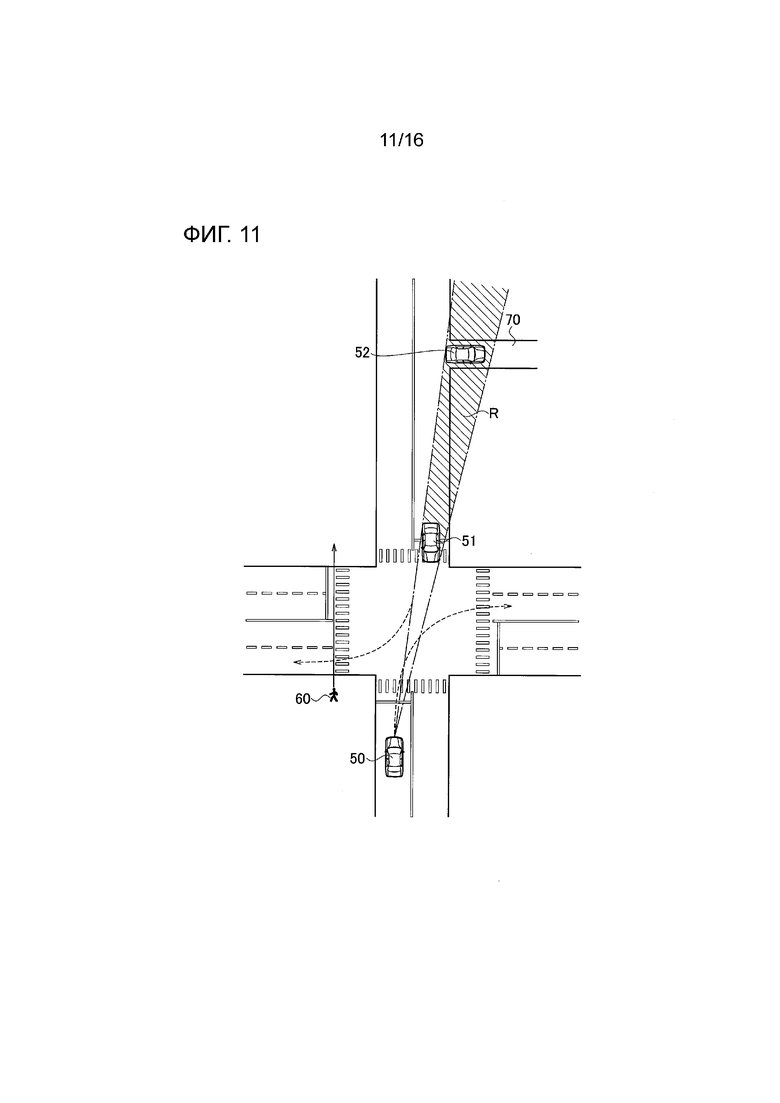
[Фиг. 11] Фиг. 11 - схема, поясняющая один пример (примыкающая дорога) способа прогнозирования курса для движущегося объекта.
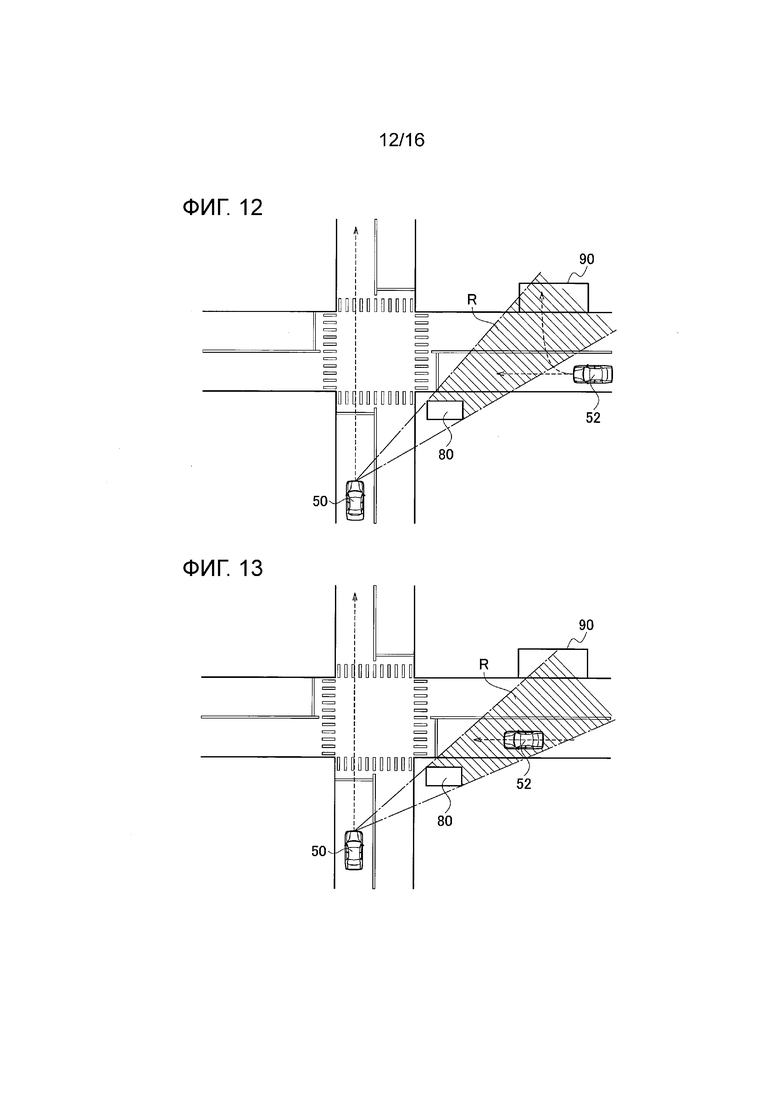
[Фиг. 12] Фиг. 12 - схема, поясняющая один пример (место для парковки) способа прогнозирования курса для движущегося объекта.
[Фиг. 13] Фиг. 13 - схема, поясняющая один пример (место для парковки) способа прогнозирования курса для движущегося объекта.
[Фиг. 14] Фиг. 14 - схема, поясняющая один пример (место для парковки) способа прогнозирования курса для движущегося объекта.
[Фиг. 15A] Фиг. 15A - это блок-схема последовательности операций, поясняющая пример работы устройства прогнозирования поведения транспортного средства согласно варианту осуществления настоящего изобретения.
[Фиг. 15B] Фиг. 15B - это блок-схема последовательности операций, поясняющая пример работы устройства прогнозирования поведения транспортного средства согласно варианту осуществления настоящего изобретения.
[Фиг. 16] Фиг. 16 - это блок-схема последовательности операций, поясняющая пример работы устройства прогнозирования поведения транспортного средства согласно варианту осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009]
Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи. Одинаковые элементы, проиллюстрированные в описании чертежей, обозначены одинаковыми ссылочными позициями, и повторяющиеся объяснения ниже не приводятся.
[0010]
(Конфигурация устройства прогнозирования поведения транспортного средства)
Конфигурация устройства прогнозирования поведения транспортного средства описана ниже со ссылкой на Фиг. 1. Устройство прогнозирования поведения транспортного средства включает в себя устройство 1 обнаружения объектов, устройство 2 оценки положения рассматриваемого транспортного средства, устройство 3 получения карты и контроллер 100. Устройство прогнозирования поведения транспортного средства может использоваться либо в транспортном средстве, имеющем функцию автономного вождения, либо в транспортном средстве, не оборудованном функцией автономного вождения. Устройство прогнозирования поведения транспортного средства также может использоваться в транспортном средстве, которое может переключаться между автономным вождением и ручным управлением. Термин «автономное вождение» согласно настоящему варианту осуществления относится к состоянию, в котором, по меньшей мере, любой из приводов тормоза, акселератора и рулевого управления управляется без работы задействованного пассажира. А именно, пассажир может управлять любыми другими исполнительными механизмами. Автономное вождение требуется только в состоянии, в котором выполняется любое управление, такое как управление ускорением/замедлением и управление боковым положением. Термин «ручное вождение» согласно настоящему варианту осуществления относится к состоянию, в котором пассажир, например, задействует тормоз, акселератор и рулевое управление.
[0011]
Устройство 1 обнаружения объектов включает в себя датчики обнаружения объектов, такие как лазерный радар, радар миллиметрового диапазона и камеру, установленные на рассматриваемом транспортном средстве. Устройство 1 обнаружения объектов обнаруживает объекты вокруг рассматриваемого транспортного средства, используя несколько датчиков обнаружения объектов. Устройство 1 обнаружения объектов также обнаруживает объекты впереди или сбоку от рассматриваемого транспортного средства. Устройство 1 обнаружения объектов обнаруживает движущиеся объекты, такие как другие транспортные средства, мотоциклы, велосипеды и пешеходы, и неподвижные объекты, такие как припаркованные транспортные средства и конструкции. Например, устройство 1 обнаружения объектов определяет положение, ориентацию (угол рыскания), размер, скорость, ускорение, рывок, замедление и скорость рыскания движущегося объекта или неподвижного объекта по отношению к рассматриваемому транспортному средству.
[0012]
Устройство 2 оценки положения рассматриваемого транспортного средства включает в себя датчик определения положения, такой как глобальная система определения местоположения (GPS), и средство одометрии, установленное на рассматриваемом транспортном средстве для измерения абсолютного положения рассматриваемого транспортного средства. Устройство 2 оценки положения рассматриваемого транспортного средства измеряет абсолютное положение рассматриваемого транспортного средства, которое является положением, ориентацией и скоростью рассматриваемого транспортного средства, на основе предварительно определенной контрольной точки, посредством использования датчика обнаружения положения.
[0013]
Устройство 3 получения карты получает информацию карты, указывающую структуру дороги, по которой движется рассматриваемое транспортное средство. Картографическая информация, полученная устройством 3 получения карты, включает в себя части информации о структуре дороги, такие как абсолютные положения полос, а также взаимосвязь и относительное расположение полос. Информация о карте, полученная устройством 3 получения карты, дополнительно включает в себя фрагменты информации об объектах, таких как парковка и автозаправочная станция. Устройство 3 получения карты может содержать базу данных карт, хранящую информацию карты, или может получать информацию карты от внешнего сервера картографических данных посредством облачных вычислений. Устройство 3 получения карты может получать информацию о карте посредством связи между транспортными средствами или связи между транспортными средствами.
[0014]
Контроллер 100 прогнозирует курс другого транспортного средства в соответствии с результатами обнаружения, полученными устройством 1 обнаружения объектов и устройством 2 оценки положения рассматриваемого транспортного средства, и информацией, полученной устройством 3 получения карты. Контроллер 100 представляет собой микрокомпьютер общего назначения, включающий в себя центральный процессор (CPU), память и блок ввода-вывода. Компьютерная программа установлена на микрокомпьютере, чтобы функционировать как устройство прогнозирования поведения транспортного средства. Микрокомпьютер функционирует как множество схем обработки информации, включенных в устройство прогнозирования поведения транспортного средства, когда компьютерная программа выполняется. Хотя настоящий вариант осуществления проиллюстрирован на примере, в котором программное обеспечение установлено для изготовления схем обработки информации, включенных в устройство прогнозирования поведения транспортного средства, специализированное аппаратное обеспечение для выполнения каждой обработки информации, как описано ниже, может быть подготовлено для составления схем обработки информации. Соответствующие схемы обработки информации могут состоять из отдельного аппаратного обеспечения.
[0015]
Контроллер 100 включает в себя в качестве множества схем обработки информации блок 4 интеграции обнаружения, блок 5 отслеживания объекта, блок 6 вычисления положения на карте, блок 10 прогнозирования поведения и блок 30 управления транспортным средством. Блок 10 прогнозирования поведения включает в себя блок 11 определения полосы движения, блок 12 прогнозирования намерения, блок 13 вычисления области слепой зоны, блок 14 предположения времени входа, блок 15 определения входа, блок 16 получения траектории и блок 17 прогнозирования курса.
[0016]
Блок 4 интеграции обнаружения объединяет несколько результатов обнаружения, полученных соответствующими датчиками обнаружения объектов, включенными в устройство 1 обнаружения объектов, и выводит один результат обнаружения для каждого объекта. В частности, блок 4 интеграции обнаружения вычисляет поведение объекта, которое является наиболее разумным и имеет наименьшую ошибку среди частей поведения объекта, обнаруженного соответствующими датчиками обнаружения объектов, с учетом характеристик ошибок соответствующих датчиков обнаружения объектов. Блок 4 интеграции обнаружения совместно оценивает результаты обнаружения, полученные различными датчиками, с помощью обычного способа объединения датчиков, чтобы получить более точный результат обнаружения для каждого объекта.
[0017]
Блок 5 отслеживания объекта отслеживает каждый объект, обнаруженный блоком 4 интеграции обнаружения. В частности, блок 5 отслеживания объекта определяет схожесть (выполняет отображение) обнаруженного объекта с интервалами в соответствии с итоговым поведением объекта в разное время, и отслеживает объект в соответствии с результатом отображения.
[0018]
Блок 6 вычисления положения на карте оценивает положение рассматриваемого транспортного средства на карте согласно абсолютному положению рассматриваемого транспортного средства, полученному устройством 2 оценки положения рассматриваемого транспортного средства, и данным карты, полученным устройством 3 получения карты.
[0019]
Блок 11 определения полосы движения указывает соответствующие полосы движения на карте, по которым движутся рассматриваемое транспортное средство и объект, в соответствии с информацией об объекте, полученной из блока 5 отслеживания объекта, и собственным положением, оцененным посредством блока 6 вычисления положения на карте.
[0020]
Блок 12 прогнозирования намерения прогнозирует все возможные полосы, по которым объект может двигаться вперед, в соответствии с информацией о полосе движения, полученной от блока 11 определения полосы движения, и структурой дороги. Например, когда объект движется по полосе по однополосной дороге, существует одна возможная полоса, по которой объект может двигаться вперед. Когда объект движется по полосе на двухполосной дороге, есть две возможные полосы, по которым объект может двигаться вперед, включая ту полосу движения, по которой объект движется прямо, и полосу, примыкающую к этой полосе движения. Блок 12 прогнозирования намерения может прогнозировать поведение объекта в соответствии с положением, направлением и ориентацией объекта.
[0021]
Блок 13 вычисления области слепой зоны вычисляет область слепой зоны вокруг рассматриваемого транспортного средства, вызванную объектом вокруг рассматриваемого транспортного средства. Область слепой зоны относится к области, в которой устройство 1 обнаружения объектов не может обнаружить другой объект из-за слепой зоны, вызванной данным объектом.
[0022]
Блок 14 предположения времени входа предполагает период доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект входит в область слепой зоны, когда движущийся объект продолжает движение прямо после обнаружения. Подробные объяснения приведены ниже.
[0023]
Блок 15 определения входа определяет, входит ли движущийся объект в область слепой зоны до того, как пройдет период доступности обнаружения, предполагаемый блоком 14 предположения времени входа. В частности, модуль 15 определения входа сравнивает период доступности обнаружения, предполагаемый блоком 14 предположения времени входа, с фактическим периодом доступности обнаружения, чтобы определить, короче ли фактический период доступности обнаружения, чем предполагаемый период доступности обнаружения.
[0024]
Блок 16 получения траектории получает траекторию движущегося объекта в течение периода от момента, когда движущийся объект обнаружен, до момента непосредственно перед тем, как движущийся объект входит в область слепой зоны.
[0025]
Блок 17 прогнозирования курса прогнозирует курс движущегося объекта в соответствии с результатом, определенным блоком 15 определения входа. Блок 17 прогнозирования курса может прогнозировать курс движущегося объекта в соответствии с результатом, определенным блоком 15 определения входа, и информацией, полученной из блока 16 получения траектории.
[0026]
Блок 30 управления транспортным средством управляет различными типами исполнительных механизмов (такими как исполнительный механизм рулевого управления, исполнительный механизм педали ускорения и исполнительный механизм тормоза), используя информацию, полученную соответствующими датчиками, для выполнения автономного управления вождением или управления вспомогательной системой вождения (например, автономного торможения), чтобы заставить рассматриваемое транспортное средство двигаться по предварительно заданному курсу.
[0027]
Пример способа прогнозирования курса описан ниже со ссылкой на Фиг. 2-5.
[0028]
Как показано на Фиг. 2, рассматриваемое транспортное средство 50 движется по правой полосе на двухполосной дороге и должно повернуть направо на следующем перекрестке. Другое транспортное средство 51 движется по правой полосе двухполосной дороги и должно повернуть направо на следующем перекрестке. Блок 12 прогнозирования намерения может спрогнозировать, повернет ли другое транспортное средство 51 направо на следующем перекрестке, в соответствии с положением, направлением, ориентацией и состоянием включения/выключения сигналов поворота другого транспортного средства 51. Другое транспортное средство 51 представляет собой встречное транспортное средство, движущееся по той же дороге, что и рассматриваемое транспортное средство 50, в направлении, противоположном направлению, в котором движется рассматриваемое транспортное средство 50. Еще одно транспортное средство 52 движется позади другого транспортного средства 51. Ссылочный знак R, показанный на Фиг. 2, указывает область слепой зоны вокруг рассматриваемого транспортного средства 50, вызванную другим транспортным средством 51. Область R слепой зоны вычисляется блоком 13 вычисления области слепой зоны. В частности, модуль 13 вычисления области слепой зоны вычисляет область слепой зоны на основе положения другого транспортного средства 51, обнаруженного устройством 1 обнаружения объектов. Другие транспортные средства 51 и 52 находятся впереди рассматриваемого транспортного средства 50 и обнаруживаются устройством 1 обнаружения объектов. В ситуации движения, показанной на Фиг. 2, устройство 1 обнаружения объектов может обнаруживать другое транспортное средство 52, которое еще не вошло в область R слепой зоны. Есть два возможных курса на дороге, спрогнозированных для движения другого транспортного средства 52, как показано стрелками, идущими от другого транспортного средства 52. Один из курсов состоит в том, что другое транспортное средство 52 продолжает движение прямо, чтобы следовать за другим транспортным средством 51. Другой вариант - другое транспортное средство 52 меняет полосу движения. Согласно настоящему варианту осуществления случай, в котором другое транспортное средство 52 входит в область R слепой зоны, приводит к состоянию, в котором устройство 1 обнаружения объектов не может обнаружить другое транспортное средство 52.
[0029]
Когда другое транспортное средство 52 меняет полосу движения, курс другого транспортного средства 52 и курс рассматриваемого транспортного средства 50 могут пересекаться друг с другом. В этом случае другое транспортное средство 52 имеет приоритет над рассматриваемым транспортным средством 50, и рассматриваемое транспортное средство 50 затем должно замедлиться или остановиться. Когда другое транспортное средство 52 продолжает движение прямо, чтобы следовать за другим транспортным средством 51, курс другого транспортного средства 52 не пересекается с курсом рассматриваемого транспортного средства 50, поскольку другое транспортное средство 52 также поворачивает направо на перекрестке. В таком случае рассматриваемое транспортное средство 50 может проезжать перекресток без замедления или остановки. Таким образом, ситуация, проиллюстрированная на Фиг. 2, требует, чтобы рассматриваемое транспортное средство 50 прогнозировало курс другого транспортного средства 52 на ранней стадии.
[0030]
Согласно настоящему варианту осуществления, блок 14 предположения времени входа предполагает период доступности обнаружения от момента, когда другое транспортное средство 52 обнаружено, до момента, когда другое транспортное средство 52 входит в область R слепой зоны, в случае, когда другое транспортное средство транспортное средство 52 продолжает движение прямо после обнаружения. Период доступности обнаружения предполагается при условии, что другое транспортное средство 52 продолжает движение сразу после обнаружения, другими словами, другое транспортное средство 52 не меняет своего поведения после обнаружения.
[0031]
Фиг. 3 иллюстрирует ситуацию движения после того, как период T1 доступности обнаружения прошел с момента движения, показанного на Фиг. 2. Область R слепой зоны изменяется каждый момент в зависимости от положения, скорости и т.п. каждого из рассматриваемого транспортного средства 50 и другого транспортного средства 51. При предположении, что другое транспортное средство 52 продолжает движение прямо после обнаружения, блок 14 предположения времени въезда предполагает период T1 доступности обнаружения от момента, когда другое транспортное средство 52 обнаружено, до момента, когда другое транспортное средство 52 входит в область R слепой зоны, в соответствии, например, со скоростями и позиционным соотношением между рассматриваемым транспортным средством 50, другим транспортным средством 51 и другим транспортным средством 52. Случай, в котором другое транспортное средство 52 не может быть обнаружено после того, как прошел период T1 доступности обнаружения, приводит к предположению с высокой вероятностью, что другое транспортное средство 52 продолжает движение прямо. Когда другое транспортное средство 52 не может быть обнаружено после того, как прошел период T1 доступности обнаружения, другими словами, когда фактический период доступности обнаружения больше или равен предполагаемому периоду T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 продолжает движение прямо.
[0032]
Фиг. 4 иллюстрирует ситуацию движения до того, как прошел период T1 доступности обнаружения, начиная с ситуации движения, показанной на Фиг. 2. Случай, в котором другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения, с высокой вероятностью приводит к предположению, что другое транспортное средство 52 меняет полосу движения. Причина этого заключается в том, что устройство 1 обнаружения объектов может обнаруживать другое транспортное средство 52 до тех пор, пока не пройдет период T1 доступности обнаружения, если другое транспортное средство 52 продолжает движение прямо в ситуации движения, показанной на Фиг. 2. Состояние, в котором устройство 1 обнаружения объектов не может обнаружить другое транспортное средство 52, а именно, другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения, с высокой вероятностью приводит к предположению, что другое транспортное средство 52 меняет полосы движения. Таким образом, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 сменило полосу движения, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения, другими словами, когда фактический период доступности обнаружения короче, чем предполагаемый период T1 доступности обнаружения. Определение того, входит ли другое транспортное средство 52 в область R слепой зоны до того, как прошел период T1 доступности обнаружения, выполняется блоком 15 определения входа.
[0033]
Настоящий вариант осуществления проиллюстрирован выше на примере, в котором модуль 17 прогнозирования курса прогнозирует курс другого транспортного средства 52, но не ограничивается этим случаем. Например, как показано на графике A на Фиг. 5, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения, модуль 17 прогнозирования курса может определить, что вероятность того, что другое транспортное средство 52 меняет полосу движения, высока. Как показано на графике B на Фиг. 5, когда другое транспортное средство 52 не может быть обнаружено после того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса может определить, что вероятность того, что другое транспортное средство 52 меняет полосу движения, мала. Состояние, в котором вероятность того, что другое транспортное средство 52 меняет полосу движения, мала, соответствует состоянию, в котором вероятность того, что другое транспортное средство 52 продолжает движение прямо, высока.
[0034]
Другое транспортное средство 51 может быть транспортным средством любого типа, например транспортным средством стандартных размеров, грузовиком и автобусом. Другое транспортное средство 52 показано выше как автомобиль, но не ограничивается автомобилем. Другое транспортное средство 52 может быть любым движущимся объектом, который может двигаться позади другого транспортного средства 51, например мотоциклом или велосипедом.
[0035]
В примере, описанном выше, блок 15 определения входа сравнивает предполагаемый период T1 доступности обнаружения при допущении, что другое транспортное средство 52 продолжает движение прямо, с фактическим периодом доступности обнаружения. Затем модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 продолжает движение прямо, когда фактический период доступности обнаружения больше или равен предполагаемому периоду T1 доступности обнаружения, и прогнозирует, что другое транспортное средство 52 меняет полосу движения, когда фактический период доступности обнаружения короче, чем предполагаемый период T1 доступности обнаружения. Однако настоящий вариант осуществления не ограничивается этим примером. Период T1 доступности обнаружения может быть периодом доступности обнаружения в случае, когда другое транспортное средство 52 движется по предварительно определенному курсу. В таком случае модуль 15 определения входа сравнивает период T1 доступности обнаружения с фактическим периодом доступности обнаружения, так что модуль 17 прогнозирования курса может спрогнозировать, движется ли другое транспортное средство 52 по предварительно определенному курсу. Например, когда период T1 доступности обнаружения является периодом при допущении, что другое транспортное средство 52 меняет полосу движения, вместо движения прямо, модуль 17 прогнозирования курса может спрогнозировать, что другое транспортное средство 52 движется прямо, когда фактический период доступности обнаружения длиннее, чем предполагаемый период T1 доступности обнаружения, и может прогнозировать, что другое транспортное средство 52 меняет полосу движения, когда фактический период доступности обнаружения короче или равен предполагаемому периоду T1 доступности обнаружения. Период T1 доступности обнаружения предпочтительно является периодом при допущении, что другое транспортное средство 52 движется прямо, как описано выше, чтобы точно предположить период T1 доступности обнаружения.
[0036]
Хотя Фиг. 2-4 иллюстрируют ситуации на прямой дороге, случай, в котором применяется настоящее изобретение, не ограничивается прямой дорогой. Настоящее изобретение применимо к случаю с изогнутой дорогой (Фиг. 6 - Фиг. 8). Есть также два возможных курса на изогнутой дороге, спрогнозированные для движения другого транспортного средства 52, как показано стрелками, идущими от другого транспортного средства 52, как показано на Фиг. 6. Как проиллюстрировано на Фиг. 7, когда другое транспортное средство 52 не может быть обнаружено после того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 движется прямо. Как проиллюстрировано на Фиг. 8, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 движется прямо. Причина, по которой другое транспортное средство 51 останавливается, как показано на Фиг. 6-8, состоит в том, что другое транспортное средство 51 ожидает, пока пешеход 60 пересечет перекресток.
[0037]
Другой пример способа прогнозирования курса описан ниже со ссылкой на Фиг. 9-11.
[0038]
Как проиллюстрировано на Фиг. 9, рассматриваемое транспортное средство 50 движется по дороге с одной полосой движения и должно повернуть направо на следующем перекрестке. Другое транспортное средство 51 также движется по дороге с односторонним движением и должно повернуть направо на следующем перекрестке. Другое транспортное средство 52 движется позади другого транспортного средства 51. В ситуации движения, показанной на Фиг. 9, устройство 1 обнаружения объектов может обнаруживать другое транспортное средство 52, которое еще не вошло в область R слепой зоны. Слева спереди от другого транспортного средства 52 имеется доступная примыкающая дорога 70. Есть два возможных курса на дороге, спрогнозированных для движения другого транспортного средства 52, как показано стрелками, идущими от другого транспортного средства 52. Один из курсов состоит в том, что другое транспортное средство 52 продолжает движение прямо, чтобы следовать за другим транспортным средством 51. Другой вариант - другое транспортное средство 52 поворачивает налево, чтобы выехать на примыкающую дорогу 70.
[0039]
Фиг. 10 иллюстрирует ситуацию движения после того, как прошел период T1 доступности обнаружения, начиная с ситуации движения, показанной на Фиг. 9. Как проиллюстрировано на Фиг. 10, когда другое транспортное средство 52 не может быть обнаружено после того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 продолжает движение прямо.
[0040]
Фиг. 11 иллюстрирует ситуацию движения до того, как прошел период T1 доступности обнаружения, начиная с ситуации движения, показанной на Фиг. 9. Случай, в котором другое транспортное средство 52 входит в область R слепой зоны до того, как истечет период T1 доступности обнаружения, с высокой вероятностью приводит к предположению, что другое транспортное средство 52 делает левый поворот. Таким образом, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 поворачивает налево, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения.
[0041]
Хотя на Фиг. 9-11 показана примыкающая дорога 70 как место, в котором другое транспортное средство 52 может повернуть налево, место, в котором другое транспортное средство 52 может повернуть налево, не ограничивается примыкающей дорогой 70. Примеры мест, в которых другое транспортное средство 52 может повернуть налево, включают место для парковки, автозаправочную станцию и круглосуточный магазин.
[0042]
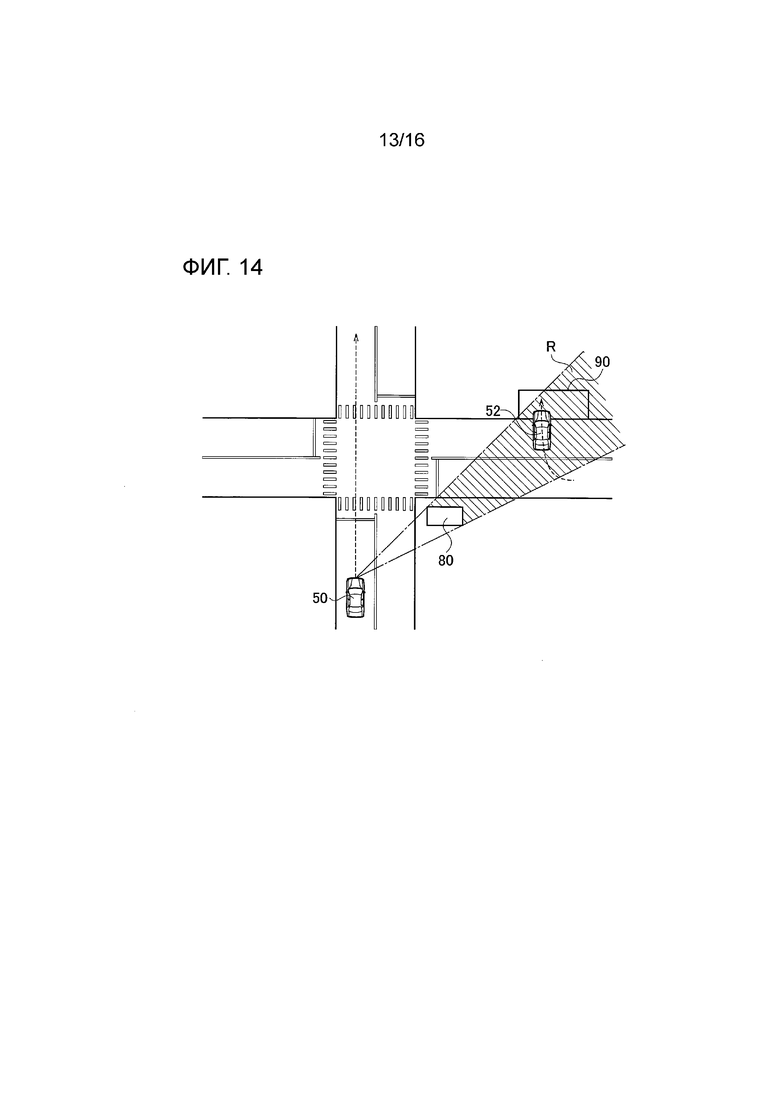
Еще один пример способа прогнозирования курса описан ниже со ссылкой на Фиг. 12-14.
[0043]
Как проиллюстрировано на Фиг. 12, рассматриваемое транспортное средство 50 движется по однополосной дороге и должно продолжать движение прямо на следующем перекрестке. Другое транспортное средство 52 движется по дороге с односторонним движением. Обозначение R, показанное на Фиг. 12, указывает область слепой зоны вокруг рассматриваемого транспортного средства 50, вызванную зданием 80. Другое транспортное средство 52 и здание 80 расположены сбоку (спереди сбоку) от рассматриваемого транспортного средства 50 и обнаруживаются устройством 1 обнаружения объектов.
[0044]
В ситуации движения, показанной на Фиг. 12, устройство 1 обнаружения объектов может обнаруживать другое транспортное средство 52, которое еще не вошло в область R слепой зоны. Имеется доступное место для парковки 90 с правой передней стороны другого транспортного средства 52. Есть два возможных курса на дороге, спрогнозированных для движения другого транспортного средства 52, как показано стрелками, идущими от другого транспортного средства 52. Один из курсов состоит в том, что другое транспортное средство 52 продолжает движение прямо. Другой курс заключается в том, что другое транспортное средство 52 поворачивает направо, чтобы въехать на место для парковки 90.
[0045]
Фиг. 13 иллюстрирует ситуацию движения после того, как прошел период T1 доступности обнаружения, начиная с ситуации движения, проиллюстрированной на Фиг. 12. Как проиллюстрировано на Фиг. 13, когда другое транспортное средство 52 не может быть обнаружено после того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 продолжает движение прямо.
[0046]
Фиг. 14 иллюстрирует ситуацию движения до того, как прошел период T1 доступности обнаружения, начиная с ситуации движения, показанной на Фиг. 12. Случай, в котором другое транспортное средство 52 входит в область R слепой зоны до того, как истечет период T1 доступности обнаружения, с высокой вероятностью приводит к предположению, что другое транспортное средство 52 делает поворот направо. Таким образом, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 поворачивает направо, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения.
[0047]
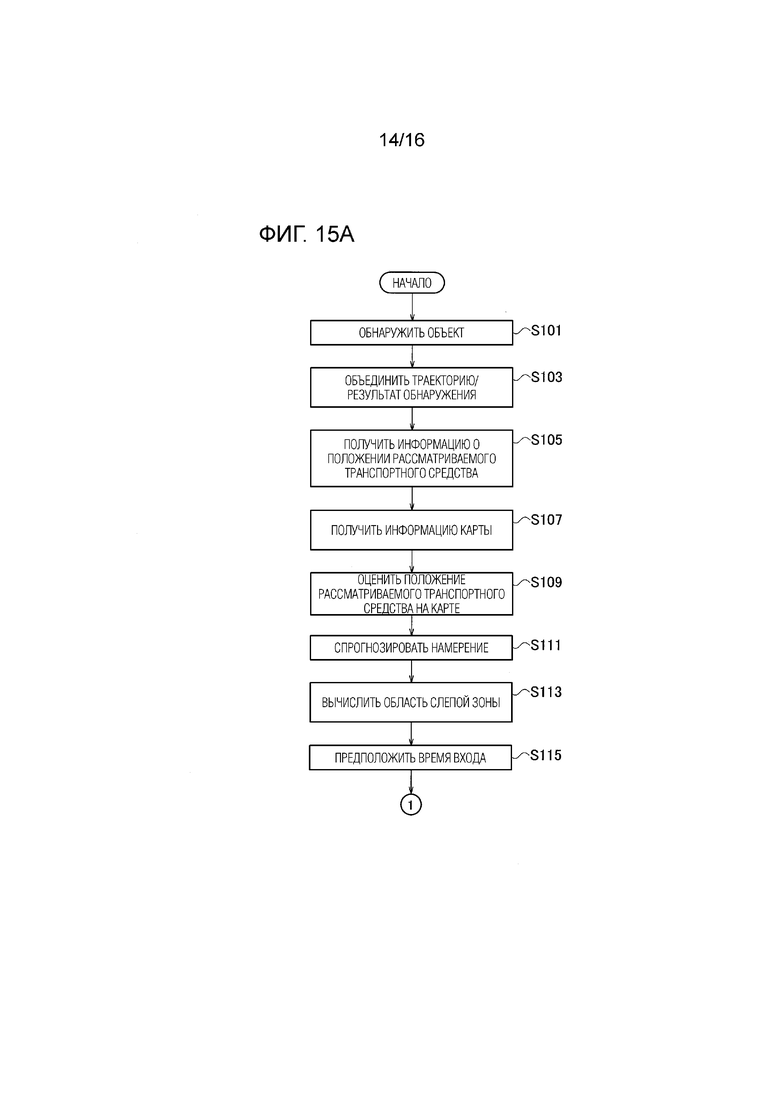
Далее, пример работы устройства прогнозирования поведения транспортного средства описывается ниже со ссылкой на блок-схемы, показанные на Фиг. 15A и Фиг. 15B.
[0048]
На этапе S101 устройство 1 обнаружения объектов обнаруживает объект (другое транспортное средство 51) впереди рассматриваемого транспортного средства 50 с использованием множества датчиков обнаружения объектов. Устройство 1 обнаружения объектов также обнаруживает движущийся объект (другое транспортное средство 52), движущийся дальше, чем другое транспортное средство 51 от рассматриваемого транспортного средства 50. Процесс переходит к этапу S103, и блок 4 интеграции обнаружения объединяет множественные результаты обнаружения, полученные соответствующими датчиками обнаружения объектов, и выводит один результат обнаружения для соответствующих других транспортных средств. Блок 5 отслеживания объекта отслеживает каждое обнаруженное и интегрированное транспортное средство.
[0049]
Процесс переходит к этапу S105, и устройство 2 оценки положения рассматриваемого транспортного средства измеряет абсолютное положение рассматриваемого транспортного средства 50 с использованием датчика обнаружения положения. Процесс переходит к этапу S107, и устройство 3 получения карты получает информацию карты, указывающую структуру дороги, по которой движется рассматриваемое транспортное средство 50. Процесс переходит к этапу S109, и блок 6 вычисления положения на карте оценивает положение рассматриваемого транспортного средства 50 на карте в соответствии с абсолютным положением рассматриваемого транспортного средства 50, измеренным на этапе S105, и данными карты, полученными на этапе S107. .
[0050]
Процесс переходит к этапу S111, и блок 12 прогнозирования намерения прогнозирует поведение (курс) каждого из другого транспортного средства 51 и другого транспортного средства 52. Фиг. 2 иллюстрирует случай, в котором блок 12 прогнозирования намерения прогнозирует, что другое транспортное средство 51 поворачивает направо на следующем перекрестке, в соответствии с положением, направлением, ориентацией и состоянием включения/выключения сигналов поворота другого транспортного средства 51.
[0051]
Процесс переходит к этапу S113, и модуль 13 вычисления области слепой зоны вычисляет область R слепой зоны вокруг рассматриваемого транспортного средства 50, вызванную другим транспортным средством 51, в соответствии с положением другого транспортного средства 51, обнаруженным устройством 1 обнаружения объектов. Процесс переходит к этапу S115, и блок 14 предположения времени входа предполагает период T1 доступности обнаружения от момента, когда другое транспортное средство 52 обнаружено, до момента, когда другое транспортное средство 52 входит в область R слепой зоны, в случае, когде другое транспортное средство 52 движется прямо после обнаружения.
[0052]
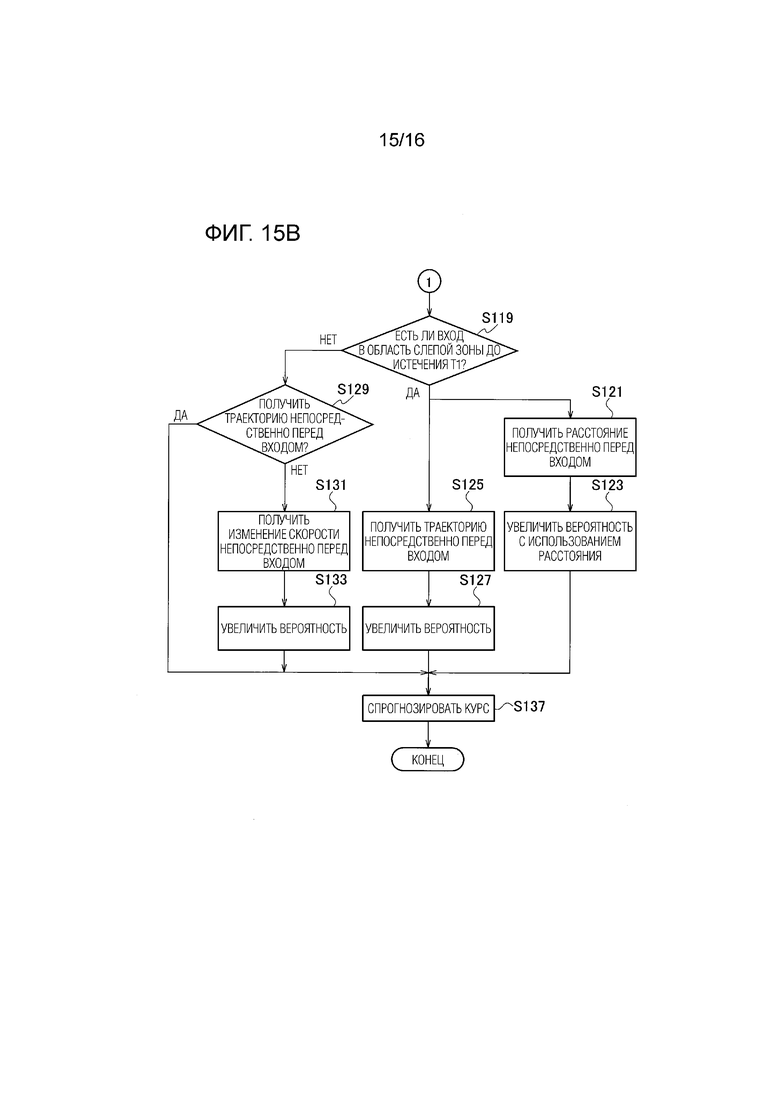
Процесс переходит к этапу S119, и блок 15 определения входа определяет, входит ли другое транспортное средство 52 в область R слепой зоны до того, как пройдет период T1 доступности обнаружения. Процесс переходит к этапу S121 и этапу S125, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения (Да на этапе S119).
[0053]
На этапе S121 устройство 1 обнаружения объектов получает расстояние между другим транспортным средством 52 и рассматриваемым транспортным средством 50 непосредственно перед тем, как другое транспортное средство 52 войдет в область R слепой зоны. Процесс переходит к этапу S123, и модуль 17 прогнозирования курса изменяет вероятность поведения другого транспортного средства 52 в соответствии с расстоянием, полученным на этапе S121. Изменение поведения движущегося объекта согласно настоящему варианту осуществления относится к одному из смены полосы движения, выполнения поворота налево и поворота направо. Например, в примере, показанном на Фиг. 4, модуль 17 прогнозирования курса увеличивает вероятность того, что другое транспортное средство 52 меняет полосу движения, по мере того как расстояние между другим транспортным средством 52 и рассматриваемым транспортным средством 50 (не показано) становится короче. Причина этого заключается в том, что ошибки датчиков тем меньше, чем меньше расстояние от цели до рассматриваемого транспортного средства 50.
[0054]
На этапе S125 блок 16 получения траектории получает траекторию другого транспортного средства 52 (положение другого транспортного средства 52 на полосе движения) в течение периода от момента, когда другое транспортное средство 52 обнаружено, до момента непосредственно перед тем, как другое транспортное средство 52 входит в область R слепой зоны. Процесс переходит к этапу S127, и модуль 17 прогнозирования курса увеличивает вероятность того, что другое транспортное средство 52 изменит поведение, в соответствии с маршрутом, полученным на этапе S125. Например, в примере, показанном на Фиг. 4, блок 17 прогнозирования курса увеличивает вероятность того, что другое транспортное средство 52 меняет полосу движения, когда траектория другого транспортного средства 52 в течение периода от момента, когда другое транспортное средство 52 обнаружено, до момента непосредственно перед тем, как другое транспортное средство 52 войдет в область R слепой зоны, отличается от пути, указывающего прямое движение вперед. В примере, проиллюстрированном на Фиг. 11, модуль 17 прогнозирования курса увеличивает вероятность того, что другое транспортное средство 52 делает левый поворот, когда траектория другого транспортного средства 52 в течение периода от момента, когда другое транспортное средство 52 обнаружено, до момента, когда другое транспортное средство 52 выезжает на примыкающую дорогу 70, отличается от пути, указывающего прямое движение вперед. Модуль 17 прогнозирования курса может прогнозировать курс другого транспортного средства 52 без выполнения процесса на этапах S121, S123, S125 и S127. А именно, модуль 17 прогнозирования курса может спрогнозировать, что другое транспортное средство 52 меняет полосу движения, делает левый поворот или поворот направо, только в соответствии с состоянием, в котором другое транспортное средство 52 входит в область R слепой зоны до того, как период T1 доступности обнаружения прошел. В примере, проиллюстрированном на Фиг. 11, модуль 17 прогнозирования курса может увеличить вероятность поворота налево другого транспортного средства 52, чтобы спрогнозировать, что другое транспортное средство повернуло налево, когда траектория другого транспортного средства 52 в течение периода от момента, когда другое транспортное средство 52 обнаружено, до момента непосредственно перед тем, как другое транспортное средство 52 входит в область R слепой зоны, указывает траекторию движения налево (на прилегающую дорогу) по полосе движения.
[0055]
Когда другое транспортное средство 52 входит в область R слепой зоны после того, как прошел период T1 доступности обнаружения (Нет на этапе S119), процесс переходит к этапу S129. На этапе S129 модуль 17 прогнозирования курса получает траекторию другого транспортного средства 52 в течение периода от момента, когда другое транспортное средство 52 обнаружено, до момента непосредственно перед тем, как другое транспортное средство 52 входит в область R слепой зоны. Другое транспортное средство 52 указывает прямое движение вперед, модуль 17 прогнозирования курса увеличивает вероятность прямого движения другого транспортного средства 52, чтобы спрогнозировать, что другое транспортное средство 52 продолжает движение прямо (на этапе S137). Когда траектория другого транспортного средства 52 не получена (Нет на этапе S129), процесс переходит к этапу S131, и модуль 17 прогнозирования курса получает изменение скорости другого транспортного средства 52 непосредственно перед тем, как другое транспортное средство 52 войдет в область R слепой зоны. Процесс переходит к этапу S133, и модуль 17 прогнозирования курса увеличивает вероятность того, что другое транспортное средство 52 движется прямо в соответствии с изменением скорости, полученным на этапе S131. Модуль 17 прогнозирования курса может прогнозировать курс другого транспортного средства 52 без выполнения процесса на этапах S129, S131 и S133. А именно, модуль 17 прогнозирования курса может прогнозировать, что другое транспортное средство 52 продолжает движение прямо, только в соответствии с состоянием, в котором другое транспортное средство 52 входит в область R слепой зоны после того, как прошел период T1 доступности обнаружения.
[0056]
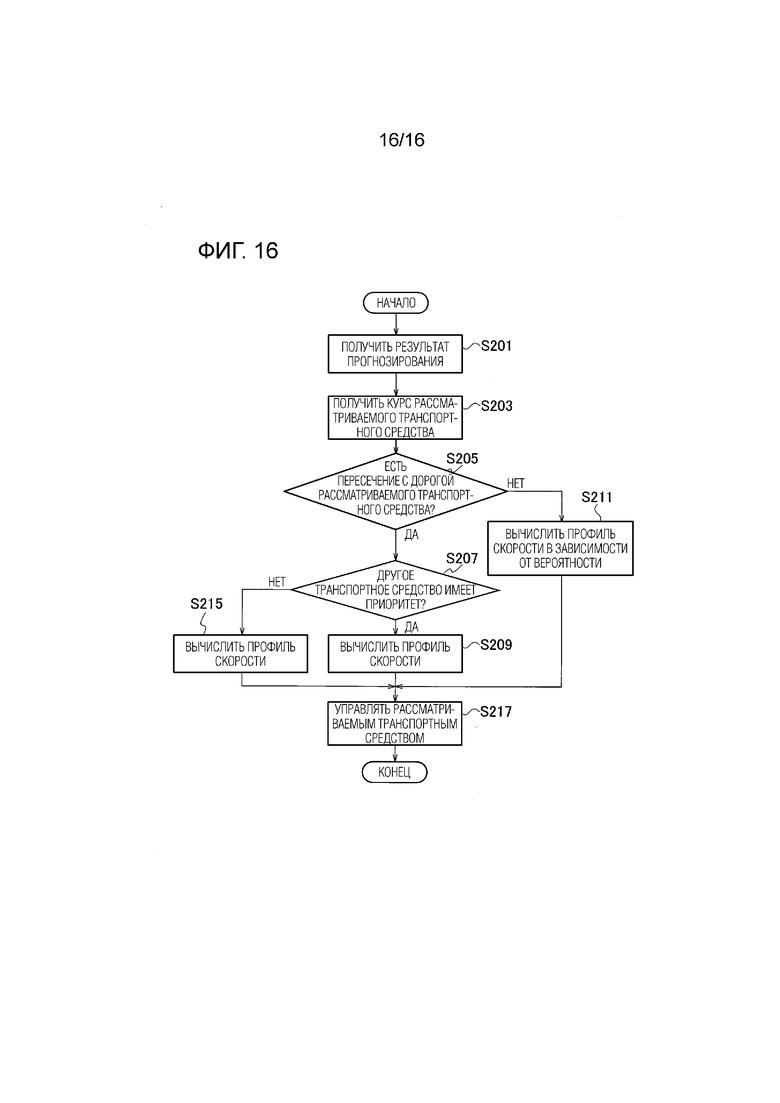
Устройство прогнозирования поведения транспортного средства может управлять рассматриваемым транспортным средством в соответствии с прогнозируемым курсом другого транспортного средства 52. Конкретные пояснения приведены ниже со ссылкой на Фиг. 16.
[0057]
На этапе S201 блок 30 управления транспортным средством получает курс другого транспортного средства 52, спрогнозированный блоком 17 прогнозирования курса. Процесс переходит к этапу S203, и блок 30 управления транспортным средством получает предварительно установленный курс рассматриваемого транспортного средства 50.
[0058]
Процесс переходит к этапу S205, и блок 30 управления транспортным средством определяет, пересекается ли курс другого транспортного средства 52 с курсом рассматриваемого транспортного средства 50. Когда курс другого транспортного средства 52 и курс рассматриваемого транспортного средства 50 пересекаются друг с другом (Да на этапе S205), процесс переходит к этапу S207, и блок 30 управления транспортным средством затем определяет, имеет ли приоритет дорога, по которой движется другое транспортное средство 52. Определение приоритета между дорогами производится в соответствии с дорожной структурой, дорожными знаками и правилами дорожного движения. Когда дорога, по которой движется другое транспортное средство 52, имеет приоритет (Да на этапе S207), процесс переходит к этапу S209, и блок 30 управления транспортным средством вычисляет профиль скорости для замедления или остановки рассматриваемого транспортного средства 50. Профиль скорости, используемый здесь, предназначен для указания скорости рассматриваемого транспортного средства 50 как функции времени. В примере, показанном на Фиг. 4, курс другого транспортного средства 52 пересекается с курсом рассматриваемого транспортного средства 50, и дорога, по которой движется другое транспортное средство 52, имеет приоритет. В этом случае блок 30 управления транспортным средством вычисляет профиль скорости для замедления или остановки рассматриваемого транспортного средства 50, чтобы дождаться прохождения другого транспортного средства 52. Процесс переходит к этапу S217, и блок 30 управления транспортным средством управляет тормозным приводом и т.п. в соответствии с профилем скорости, чтобы выполнить управление автономным движением. Это может предотвратить внезапное замедление.
[0059]
Когда курс другого транспортного средства 52 не пересекается с курсом рассматриваемого транспортного средства 50 (Нет на этапе S205), процесс переходит к этапу S211, и блок 30 управления транспортным средством вычисляет профиль скорости в зависимости от степени вероятности курса другой машины 52. Как проиллюстрировано на Фиг. 3, когда вероятность того, что другое транспортное средство 52 продолжает движение прямо, высока, блок 30 управления транспортным средством вычисляет профиль скорости, указывающий постоянную скорость. Процесс переходит к этапу S217, и блок 30 управления транспортным средством выполняет управление автономным вождением на основе профиля скорости. Это соответственно обеспечивает плавное автономное вождение.
[0060]
Когда дорога, по которой движется другое транспортное средство 52, не имеет приоритета (Нет на этапе S207), а именно когда дорога, по которой движется рассматриваемое транспортное средство 50, имеет приоритет, процесс переходит к этапу S215. На этапе S215 блок 30 управления транспортным средством вычисляет профиль скорости, указывающий постоянную скорость. Процесс переходит к этапу S217, и блок 30 управления транспортным средством выполняет управление автономным вождением на основе профиля скорости. Это соответственно обеспечивает плавное автономное вождение.
[0061]
Как описано выше, устройство прогнозирования поведения транспортного средства согласно настоящему варианту осуществления может обеспечивать следующие функциональные эффекты.
[0062]
Устройство 1 обнаружения объектов обнаруживает объект (другое транспортное средство 51 или здание 80) впереди или сбоку от рассматриваемого транспортного средства 50. Устройство 1 обнаружения объектов также определяет положение объекта по отношению к рассматриваемому транспортному средству 50 впереди или сбоку от рассматриваемого транспортного средства 50. Устройство 1 обнаружения объектов дополнительно обнаруживает движущийся объект (другое транспортное средство 52), который осуществляет движение дальше, чем упомянутый объект, от рассматриваемого транспортного средства 50. Блок 13 вычисления области слепой зоны вычисляет область R слепой зоны вокруг рассматриваемого транспортного средства 50, вызванного объектом, в соответствии с положением объекта, обнаруженного устройством 1 обнаружения объектов. Блок 14 предположения времени входа предполагает период T1 доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект входит в область R слепой зоны, в случае, когда движущийся объект движется прямо после обнаружения. Блок 15 определения входа определяет, входит ли движущийся объект в область R слепой зоны до того, как пройдет период T1 доступности обнаружения. Блок 30 управления транспортным средством прогнозирует курс движущегося объекта в соответствии с результатом определения. В примере, проиллюстрированном на Фиг. 4, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 (движущийся объект) сменило полосу движения, когда другое транспортное средство 52 входит в область R слепой зоны до того, как пройдет период T1 доступности обнаружения. Таким образом, устройство прогнозирования поведения транспортного средства согласно настоящему варианту осуществления может прогнозировать курс движущегося объекта на ранней стадии. Как описано выше, объект впереди или сбоку от рассматриваемого транспортного средства 50 может быть либо движущимся объектом (другое транспортное средство 51), либо неподвижным объектом (здание 80). Другое транспортное средство 51 представляет собой встречное транспортное средство, движущееся по той же дороге, что и рассматриваемое транспортное средство 50, в направлении, противоположном направлению, в котором движется рассматриваемое транспортное средство 50. Стационарный объект не ограничивается домом 80. Примеры стационарных объектов включают припаркованные транспортные средства. Период T1 доступности обнаружения может быть периодом от момента, когда другое транспортное средство 52 обнаружено, до периода, когда другое транспортное средство 52 входит в область R слепой зоны в случае, когда другое транспортное средство 52 движется по предварительно определенному курсу после обнаружения. Предварительно определенный курс включает прямое движение вперед и смену полосы движения. Устройство 1 обнаружения объектов может сравнивать предполагаемый период T1 доступности обнаружения с фактическим периодом доступности обнаружения от момента, когда другое транспортное средство 52 обнаружено, до периода, когда другое транспортное средство 52 фактически входит в область R слепой зоны, чтобы прогнозировать курс другого транспортного средства 52 в соответствии с результатом сравнения.
[0063]
В случае, когда дорога, по которой движется движущийся объект, включает в себя множество полос, и движущийся объект движется по одной из множества полос, отличной от полосы, наиболее удаленной от транспортного средства 50, при обнаружении движущегося объекта, и когда блок 15 определения входа определяет, что движущийся объект входит в область R слепой зоны до того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что движущийся объект сменил полосу движения. В примере, показанном на Фиг. 2, дорога, по которой движется другое транспортное средство 52 (движущийся объект), включает в себя множество полос (две полосы движения), а другое транспортное средство 52 движется по полосе из нескольких полос движения, отличной от полосы, наиболее удаленной от рассматриваемого транспортного средства 50 полоса движения при обнаружении другого транспортного средства 52. На Фиг. 2 полоса, наиболее удаленная от рассматриваемого транспортного средства 50 на полосе, по которой движется другое транспортное средство 52, является левой полосой движения. Как показано на Фиг. 2, другое транспортное средство 52 движется по правой полосе. Как проиллюстрировано на Фиг. 4, когда другое транспортное средство 52 входит в область R слепой зоны до того, как истечет период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 сменило полосу движения. Таким образом, устройство прогнозирования поведения транспортного средства согласно настоящему варианту осуществления может прогнозировать курс движущегося объекта на ранней стадии.
[0064]
В случае, когда имеется доступное для въезда место с левой стороны дороги, по которой движется движущийся объект, и в котором блок 15 определения въезда определяет, что движущийся объект входит в область R слепой зоны до истечения периода T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что движущийся объект повернул налево. В примере, показанном на Фиг. 9, доступное для въезда место (примыкающая дорога 70) присутствует с левой стороны дороги, по которой движется другое транспортное средство 52 (движущийся объект). Как проиллюстрировано на Фиг. 11, когда другое транспортное средство 52 входит в область R слепой зоны до того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 совершило левый поворот. Таким образом, устройство прогнозирования поведения транспортного средства согласно настоящему варианту осуществления может прогнозировать курс движущегося объекта на ранней стадии.
[0065]
В случае, когда есть доступное для въезда место на правой стороне дороги, по которой движется движущийся объект, и когда блок 15 определения въезда определяет, что движущийся объект входит в область R слепой зоны до истечения периода T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что движущийся объект повернул направо. В примере, показанном на Фиг. 12, доступное для въезда место (место для парковки 90) присутствует с правой стороны дороги, по которой движется другое транспортное средство 52 (движущийся объект). Как проиллюстрировано на Фиг. 14, когда другое транспортное средство 52 входит в область R слепой зоны до того, как истечет период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что другое транспортное средство 52 повернуло направо. Таким образом, устройство прогнозирования поведения транспортного средства согласно настоящему варианту осуществления может прогнозировать курс движущегося объекта на ранней стадии.
[0066]
Когда блок 15 определения входа определяет, что движущийся объект входит в область R слепой зоны до того, как прошел период T1 доступности обнаружения, блок 17 прогнозирования курса увеличивает вероятность изменения поведения движущегося объекта, по мере того как расстояние между движущимся объектом и рассматриваемым транспортным средством 50 становится короче. Согласно настоящему варианту осуществления изменение поведения движущегося объекта относится к одному из смены полосы движения, выполнения поворота налево и поворота направо. Блок 17 прогнозирования курса увеличивает вероятность того, что движущийся объект сменил полосу движения, повернул налево или повернул направо, по мере того как расстояние между движущимся объектом и рассматриваемым транспортным средством 50 становится короче. Поскольку ошибки датчиков тем меньше, чем меньше расстояние от цели до рассматриваемого транспортного средства 50, модуль 17 прогнозирования курса увеличивает вероятность, как описано выше, чтобы прогнозировать курс движущегося объекта с высокой точностью.
[0067]
Когда блок 15 определения входа определяет, что движущийся объект входит в область R слепой зоны до того, как прошел период T1 доступности обнаружения, блок 17 прогнозирования курса увеличивает вероятность изменения поведения движущегося объекта в соответствии с траекторией движущегося объекта от точки, когда движущийся объект обнаружен, до точки непосредственно перед тем, как движущийся объект войдет в область R слепой зоны. В примере, показанном на Фиг. 4, когда отслеживание другого транспортного средства 52 (движущийся объект) в течение периода от момента, когда другое транспортное средство 52 обнаружено, до момента непосредственно перед тем, как другое транспортное средство 52 войдет в область R слепой зоны, отличается от траектории, указывающей прямое движение вперед, модуль 17 прогнозирования курса увеличивает вероятность того, что другое транспортное средство 52 сменило полосу движения. Таким образом, модуль 17 прогнозирования курса увеличивает вероятность изменения поведения в соответствии с траекторией движущегося объекта, чтобы прогнозировать курс движущегося объекта с высокой точностью.
[0068]
Когда модуль 15 определения входа определяет, что движущийся объект входит в область R слепой зоны после того, как прошел период T1 доступности обнаружения, модуль 17 прогнозирования курса прогнозирует, что движущийся объект продолжает двигаться прямо. Таким образом, рассматриваемое транспортное средство 50 может проезжать перекресток, не дожидаясь другого транспортного средства 52 (движущегося объекта), как показано на Фиг. 3. Это соответственно способствует плавному движению рассматриваемого транспортного средства 50.
[0069]
Когда блок 15 определения входа определяет, что движущийся объект входит в область R слепой зоны после того, как прошел период T1 доступности обнаружения, блок 17 прогнозирования курса может увеличить вероятность того, что движущийся объект будет продолжать движение прямо, по мере того как расстояние между движущимися объектом и рассматриваемым транспортным средством 50 становится короче. Когда траектория движущегося объекта от точки, когда движущийся объект обнаружен, до точки непосредственно перед тем, как движущийся объект входит в область R слепой зоны, указывает прямое движение вперед, модуль 17 прогнозирования курса может увеличить вероятность того, что движущийся объект продолжает ехать прямо. Блок 17 прогнозирования курса увеличивает вероятность, как описано выше, чтобы прогнозировать курс движущегося объекта с высокой точностью.
[0070]
Блок 30 управления транспортным средством вычисляет профиль скорости для рассматриваемого транспортного средства 50 на основе курса другого транспортного средства 52, спрогнозированного блоком 17 прогнозирования курса. Затем блок 30 управления транспортным средством управляет рассматриваемым транспортным средством 50 в соответствии с рассчитанным профилем скорости. Это предотвращает резкое замедление и обеспечивает плавное автономное вождение. Например, как показано на Фиг. 4, когда курс другого транспортного средства 52 пересекается с курсом рассматриваемого транспортного средства 50 и когда дорога, по которой движется другое транспортное средство 52, имеет приоритет, блок 30 управления транспортным средством вычисляет профиль скорости для замедления или остановки рассматриваемого транспортного средства 50, чтобы дождаться прохождения другого транспортного средства 52. Блок 30 управления транспортным средством управляет тормозным приводом и т.п. в соответствии с профилем скорости, чтобы выполнять управление автономным движением. Это может предотвратить внезапное замедление.
[0071]
Когда курс движущегося объекта пересекается с курсом рассматриваемого транспортного средства 50, и когда дорога, по которой движется рассматриваемое транспортное средство 50, имеет приоритет, блок 30 управления транспортным средством может вычислить профиль скорости, указывающий постоянную скорость для выполнения автономного управления движением на основе профиля скорости. Когда курс движущегося объекта не пересекается с курсом рассматриваемого транспортного средства 50, блок 30 управления транспортным средством может вычислить профиль скорости, указывающий постоянную скорость, для выполнения управления автономным движением на основе профиля скорости. Это соответственно обеспечивает плавное автономное вождение.
[0072]
Соответствующие функции, описанные в приведенном выше варианте осуществления, могут быть реализованы в одной или нескольких схемах обработки. Соответствующие схемы обработки включают в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Соответствующие схемы обработки также включают в себя специализированную интегральную схему (ASIC), сконфигурированную для выполнения функций, описанных выше, или другие устройства, такие как компоненты схемы. Устройство прогнозирования поведения транспортного средства может улучшить функции компьютера.
[0073]
Хотя настоящее изобретение было описано выше со ссылкой на определенный вариант осуществления, следует понимать, что настоящее изобретение не следует ограничивать приведенным описанием и чертежами, составляющими часть данного раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники согласно данному раскрытию.
Список позиционных обозначений
[0074]
1 УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ
2 УСТРОЙСТВО ОЦЕНКИ ПОЛОЖЕНИЯ РАССМАТРИВАЕМОГО ТРАНСПОРТНОГО СРЕДСТВА
3 УСТРОЙСТВО ПОЛУЧЕНИЯ КАРТЫ
4 БЛОК ИНТЕГРАЦИИ ОБНАРУЖЕНИЯ
5 БЛОК ОТСЛЕЖИВАНИЯ ОБЪЕКТА
6 БЛОК ВЫЧИСЛЕНИЯ ПОЛОЖЕНИЯ НА КАРТЕ
10 БЛОК ПРОГНОЗИРОВАНИЯ ПОВЕДЕНИЯ
11 БЛОК ОПРЕДЕЛЕНИЯ ПОЛОСЫ
12 БЛОК ПРОГНОЗИРОВАНИЯ НАМЕРЕНИЯ
13 БЛОК ВЫЧИСЛЕНИЯ ОБЛАСТИ СЛЕПОЙ ЗОНЫ
14 БЛОК ПРЕДПОЛОЖЕНИЯ ВРЕМЕНИ ВХОДА
15 БЛОК ОПРЕДЕЛЕНИЯ ВХОДА
16 БЛОК ПОЛУЧЕНИЯ ТРАЕКТОРИИ
17 БЛОК ПРОГНОЗИРОВАНИЯ КУРСА
30 БЛОК УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
Изобретение относится к способу прогнозирования поведения транспортного средства. Способ прогнозирования поведения транспортного средства содержит обнаружение положения объекта, по отношению к рассматриваемому транспортному средству, расположенного впереди или сбоку от рассматриваемого транспортного средства, посредством использования датчика, обнаружение движущегося объекта, который осуществляет движение дальше, чем упомянутый объект, от рассматриваемого транспортного средства, посредством использования датчика. Способ также содержит вычисление области слепой зоны вокруг рассматриваемого транспортного средства, вызванной упомянутым объектом, в которой упомянутый датчик не может осуществлять обнаружение, предположение периода доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект входит в область слепой зоны, в случае, когда движущийся объект движется по предварительно определенному курсу после обнаружения. Сравнение предполагаемого периода доступности обнаружения с фактическим периодом доступности обнаружения и прогнозирование курса движущегося объекта в соответствии с результатом сравнения. Достигается своевременное прогнозирование курса движущегося объекта. 5 н. и 12 з.п. ф-лы, 17 ил.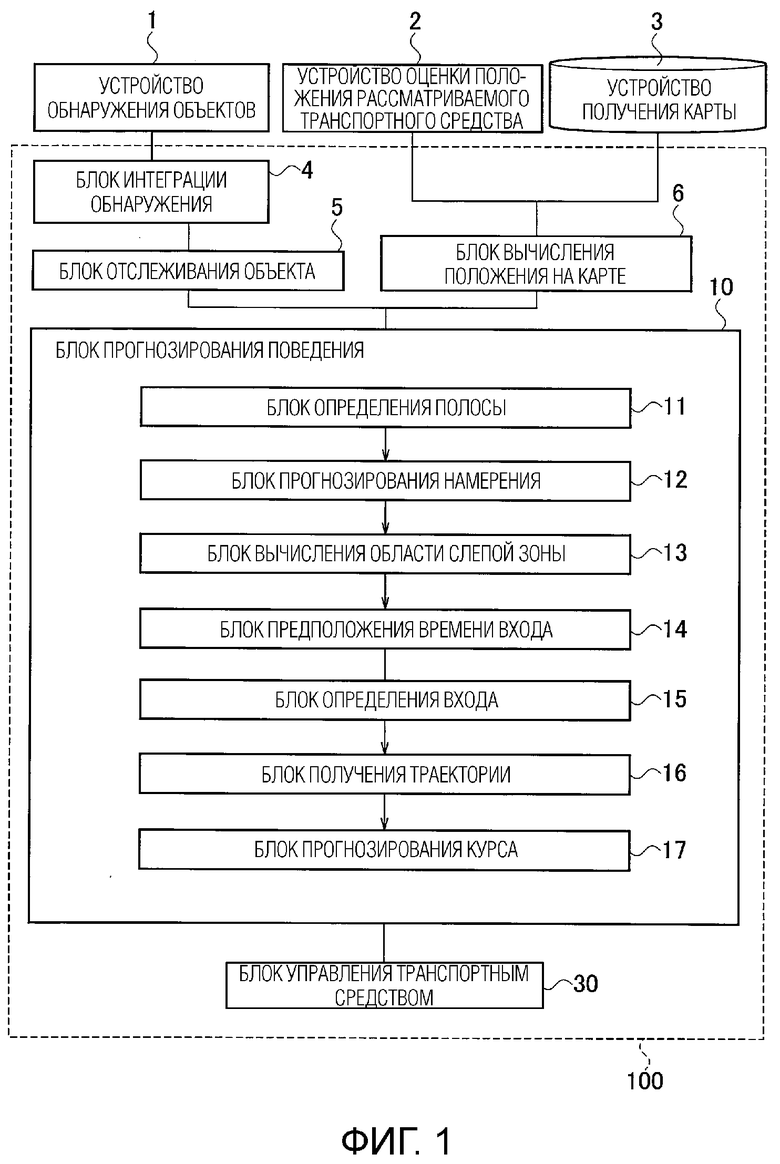
1. Способ прогнозирования поведения транспортного средства, содержащий:
обнаружение положения объекта, по отношению к рассматриваемому транспортному средству, расположенного впереди или сбоку от рассматриваемого транспортного средства, посредством использования датчика, установленного на рассматриваемом транспортном средстве;
обнаружение движущегося объекта, который осуществляет движение дальше, чем упомянутый объект, от рассматриваемого транспортного средства, посредством использования датчика;
вычисление, на основе упомянутого положения, области слепой зоны вокруг рассматриваемого транспортного средства, вызванной упомянутым объектом, в которой упомянутый датчик не может осуществлять обнаружение;
предположение периода доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект входит в область слепой зоны, в случае, когда движущийся объект движется по предварительно определенному курсу после обнаружения;
сравнение предполагаемого периода доступности обнаружения с фактическим периодом доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект фактически входит в область слепой зоны; и
прогнозирование курса движущегося объекта в соответствии с результатом сравнения.
2. Способ прогнозирования поведения транспортного средства по п. 1, в котором:
предварительно определенным курсом является прямое движение вперед; и
курс движущегося объекта прогнозируется в соответствии с результатом сравнения того, короче ли фактический период доступности обнаружения, чем предполагаемый период доступности обнаружения.
3. Способ прогнозирования поведения транспортного средства по п. 1 или 2, в котором объектом является встречное транспортное средство, движущееся в направлении, противоположном рассматриваемому транспортному средству, по дороге, по которой рассматриваемое транспортное средство также движется.
4. Способ прогнозирования поведения транспортного средства по п. 1 или 2, в котором объектом является неподвижный объект.
5. Способ прогнозирования поведения транспортного средства по любому из пп. 1-4, дополнительно содержащий прогнозирование того, что движущийся объект меняет полосу движения, когда фактический период доступности обнаружения короче, чем предполагаемый период доступности обнаружения, в случае, когда предварительно определенным курсом является прямое движение вперед, дорога, по которой движется движущийся объект, включает в себя множество полос, и движущийся объект движется по одной из множества полос, отличной от полосы, наиболее удаленной от рассматриваемого транспортного средства, при обнаружении движущегося объекта.
6. Способ прогнозирования поведения транспортного средства по любому из пп. 1-5, дополнительно содержащий прогнозирование того, что движущийся объект совершает поворот налево, когда фактический период доступности обнаружения короче, чем предполагаемый период доступности обнаружения, в случае, когда предварительно определенным курсом является прямое движение вперед, и на левой стороне дороги есть доступное место для въезда, по которому движущийся объект движется.
7. Способ прогнозирования поведения транспортного средства по любому из пп. 1-6, дополнительно содержащий прогнозирование того, что движущийся объект совершает поворот направо, когда фактический период доступности обнаружения короче, чем предполагаемый период доступности обнаружения, в случае, когда предварительно определенным курсом является прямое движение вперед, и на правой стороне дороги есть доступное место для въезда, по которому движется движущийся объект.
8. Способ прогнозирования поведения транспортного средства по любому из пп. 1-7, дополнительно содержащий:
увеличение вероятности того, что поведение движущегося объекта изменяется по мере того, как расстояние между движущимся объектом и рассматриваемым транспортным средством становится короче, в случае, когда предварительно определенный курс является прямым движением, а фактический период доступности обнаружения короче, чем предполагаемый период доступности обнаружения; и
прогнозирование курса движущегося объекта в соответствии с вероятностью и результатом сравнения.
9. Способ прогнозирования поведения транспортного средства по любому из пп. 1-7, дополнительно содержащий:
увеличение вероятности того, что поведение движущегося объекта изменяется в соответствии с отслеживанием движущегося объекта от момента, когда движущийся объект обнаружен, до момента непосредственно перед тем, как движущийся объект входит в область слепой зоны, в случае, когда предварительно определенный курс представляет собой прямое движение вперед, и фактический период доступности обнаружения короче, чем предполагаемый период доступности обнаружения; и
прогнозирование курса движущегося объекта в соответствии с вероятностью и результатом сравнения.
10. Способ прогнозирования поведения транспортного средства по любому из пп. 1-9, дополнительно содержащий прогнозирование того, что движущийся объект движется прямо, в случае, когда предварительно определенным курсом является прямое движение вперед, а фактический период доступности обнаружения больше или равен предполагаемому периоду доступности обнаружения.
11. Способ прогнозирования поведения транспортного средства по п. 10, дополнительно содержащий:
увеличение вероятности того, что движущийся объект движется прямо, по мере того, как расстояние между движущимся объектом и рассматриваемым транспортным средством становится короче, или увеличение вероятности того, что движущийся объект движется прямо, в соответствии с траекторией движущегося объекта от момента, когда движущийся объект обнаружен, до момента непосредственно перед тем, как движущийся объект входит в область слепой зоны; и
прогнозирование, что движущийся объект движется прямо.
12. Способ прогнозирования поведения транспортного средства по любому из пп. 1-11, дополнительно содержащий вычисление профиля скорости, указывающего скорость рассматриваемого транспортного средства как функцию времени, в соответствии с результатом прогнозирования курса движущегося объекта.
13. Способ управления транспортным средством для управления рассматриваемым транспортным средством с использованием способа прогнозирования поведения транспортного средства по п. 12, при этом способ управления транспортным средством содержит:
вычисление профиля скорости для замедления или остановки рассматриваемого транспортного средства, когда курс движущегося объекта пересекается с курсом рассматриваемого транспортного средства, и дорога, по которой движется движущийся объект, имеет приоритет; и
управление рассматриваемым транспортным средством в соответствии с профилем скорости.
14. Способ управления транспортным средством для управления рассматриваемым транспортным средством с использованием способа прогнозирования поведения транспортного средства по п. 12, при этом способ управления транспортным средством содержит:
вычисление профиля скорости, указывающего постоянную скорость, когда курс движущегося объекта пересекается с курсом рассматриваемого транспортного средства, и дорога, по которой движется рассматриваемое транспортное средство, имеет приоритет; и
управление рассматриваемым транспортным средством в соответствии с профилем скорости.
15. Способ управления транспортным средством для управления рассматриваемым транспортным средством с использованием способа прогнозирования поведения транспортного средства по п. 12, при этом способ управления транспортным средством содержит:
вычисление профиля скорости, указывающего постоянную скорость, когда курс движущегося объекта не пересекается с курсом рассматриваемого транспортного средства; и
управление рассматриваемым транспортным средством в соответствии с профилем скорости.
16. Устройство прогнозирования поведения транспортного средства, содержащее:
датчик, сконфигурированный с возможностью обнаружения положения объекта, по отношению к рассматриваемому транспортному средству, расположенного впереди или сбоку от рассматриваемого транспортного средства, и движущегося объекта, осуществляющего движение дальше упомянутого объекта от рассматриваемого транспортного средства; и
блок управления,
причем блок управления сконфигурирован с возможностью:
вычислять на основе упомянутого положения, обнаруженного датчиком, область слепой зоны вокруг рассматриваемого транспортного средства, вызванную упомянутым объектом, в которой упомянутый датчик не может осуществлять обнаружение;
предполагать период доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект входит в область слепой зоны, в случае, когда движущийся объект движется по предварительно определенному курсу после обнаружения датчиком;
сравнивать предполагаемый период доступности обнаружения с фактическим периодом доступности обнаружения от момента, когда движущийся объект обнаружен, до момента, когда движущийся объект фактически входит в область слепой зоны; и
прогнозировать курс движущегося объекта в соответствии с результатом сравнения.
17. Устройство прогнозирования поведения транспортного средства по п. 16, в котором:
предварительно определенным курсом является прямое движение вперед; и
блок управления прогнозирует курс движущегося объекта в соответствии с результатом сравнения того, короче ли фактический период доступности обнаружения, чем предполагаемый период доступности обнаружения.
| JP 5573418 B2, 20.08.2014 | |||
| WO 2015152304 A1, 08.10.2015 | |||
| JP 5766924 B2, 19.08.2015 | |||
| RU 2015105174 A, 10.09.2016. |

