Область техники
[0001]
Настоящее изобретение относится к способу прогнозирования поведения, аппаратуре прогнозирования поведения и аппаратуре управления транспортным средством.
Предпосылки изобретения
[0002]
Традиционно была известна методика прогнозирования поведения объекта вокруг транспортного средства и управления транспортным средством на основе прогнозируемого поведения объектов. Например, патентный документ 1 раскрывает устройство управления перемещением для управления перемещением главного транспортного средства на основе состояния перемещения впереди идущего транспортного средства, которое перемещается впереди главного транспортного средства. Устройство управления перемещением определяет характеристику вождения впереди идущего транспортного средства на основе информации о операции вождения впереди идущего транспортного средства, которое перемещается впереди главного транспортного средства, и прогнозирует состояние перемещения впереди идущего транспортного средства на основе определенной характеристики вождения. Затем устройство управления перемещением управляет перемещением главного транспортного средства на основе прогнозируемого состояния перемещения впереди идущего транспортного средства.
СПИСОК ЦИТАТ
Патентная литература
[0003]
Патентная литература 1 Публикация заявки на патент Японии №.2008-87545
Сущность изобретения
Техническая проблема
[0004]
Однако согласно методике, раскрытой в Патентной литературе 1, поведение впереди идущего транспортного средства прогнозируется на основе характеристик вождения впереди идущего транспортного средства, и, таким образом, возникает неудобство, заключающееся в том, что ситуацию можно спрогнозировать только в краткосрочной перспективе.
[0005]
Настоящее изобретение создано с учетом вышеописанных проблем, и цель настоящего изобретения состоит в том, чтобы предоставить способ прогнозирования поведения, аппаратуру прогнозирования поведения и аппаратуру управления транспортным средством, которые могут прогнозировать ситуацию вокруг транспортного средства в долгосрочной перспективе.
Техническое решение
[0006]
В способе прогнозирования поведения согласно аспекту настоящего изобретения первый объект, который влияет на поведение транспортного средства, указывается среди объектов, присутствующих вокруг транспортного средства. Кроме того, в способе прогнозирования поведения выполняется процесс прогнозирования для извлечения второго объекта, который влияет на поведение первого объекта среди множества объектов, присутствующих вокруг первого объекта, и прогнозирования поведения. В способе прогнозирования поведения извлеченный второй объект задается как новый первый объект, и выполняется процесс прогнозирования для извлечения нового второго объекта, который влияет на поведение нового первого объекта, и прогнозирования поведения. В способе прогнозирования поведения процесс прогнозирования повторяется предопределенное количество раз. В способе прогнозирования поведения поведение первого объекта прогнозируется на основе поведения каждого из вторых объектов, подвергнутых процессу прогнозирования.
Преимущественные эффекты
[0007]
Согласно настоящему изобретению можно прогнозировать ситуацию вокруг транспортного средства в долгосрочной перспективе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[ФИГ. 1] Фиг. 1 - блок-схема, иллюстрирующая структуру аппаратуры прогнозирования поведения согласно настоящему варианту осуществления.
[ФИГ. 2] Фиг. 2 - блок-схема, иллюстрирующая процедуры процессов прогнозирования поведений согласно настоящему варианту осуществления.
[ФИГ. 3] Фиг. 3 представляет собой блок-схему, иллюстрирующую процедуру процессов задания количества раз извлечения.
[ФИГ. 4] Фиг. 4 - блок-схема, иллюстрирующая процедуры процессов задания первой области.
[ФИГ. 5A] Фиг. 5A - пояснительная диаграмма, иллюстрирующая пример диапазона влево-вправо первой области, заданной вокруг главного транспортного средства на прямой дороге.
[ФИГ. 5B] Фиг. 5B - пояснительная диаграмма, иллюстрирующая пример диапазона влево-вправо первой области, заданной вокруг главного транспортного средства на скоростной автомагистрали.
[ФИГ. 5C] Фиг. 5C - пояснительная диаграмма, иллюстрирующая пример диапазона влево-вправо первой области, заданной вокруг главного транспортного средства на скоростной автомагистрали.
[ФИГ. 6] Фиг. 6 - пояснительная диаграмма, иллюстрирующая пример диапазона вперед-назад первой области, заданной вокруг главного транспортного средства на скоростной автомагистрали.
[ФИГ. 7A] Фиг. 7A - пояснительная диаграмма, иллюстрирующая пример диапазона первой области, заданной вокруг главного транспортного средства в точке пересечения без светофора.
[ФИГ. 7B] Фиг. 7B - пояснительная диаграмма, иллюстрирующая пример диапазона первой области, заданной вокруг главного транспортного средства в точке пересечения без светофора.
[ФИГ. 8A] Фиг. 8A - пояснительная диаграмма, иллюстрирующая пример диапазона первой области, заданной вокруг главного транспортного средства на прямой дороге обычной дороги.
[ФИГ. 8B] Фиг. 8B - пояснительная диаграмма, иллюстрирующая пример диапазона первой области, заданной вокруг главного транспортного средства на прямой дороге обычной дороги.
[ФИГ. 8C] Фиг. 8C - пояснительная диаграмма, иллюстрирующая пример диапазона первой области, заданной вокруг главного транспортного средства на прямой дороге обычной дороги.
[ФИГ. 8D] Фиг. 8D - пояснительная диаграмма, иллюстрирующая пример диапазона первой области, заданной вокруг главного транспортного средства на прямой дороге обычной дороги.
[ФИГ. 9] Фиг. 9 - пояснительная диаграмма, иллюстрирующая концепцию извлечения первого объекта в точке пересечения.
[ФИГ. 10A] Фиг. 10A - пояснительная схема, иллюстрирующая концепцию извлечения первого объекта на прямой дороге.
[ФИГ. 10B] Фиг. 10B - пояснительная диаграмма, иллюстрирующая концепцию извлечения первого объекта на прямой дороге.
[ФИГ. 11] Фиг. 11 - пояснительная схема, иллюстрирующая концепцию извлечения первого объекта на прямой дороге.
[ФИГ. 12A] Фиг. 12A - пояснительная схема, иллюстрирующая концепцию извлечения второго объекта на прямой дороге.
[ФИГ. 12B] Фиг. 12B - пояснительная диаграмма, иллюстрирующая концепцию извлечения второго объекта на прямой дороге.
[ФИГ. 12C] Фиг. 12C - пояснительная схема, иллюстрирующая концепцию извлечения второго объекта на прямой дороге.
[ФИГ. 13A] Фиг. 13A - пояснительная схема, иллюстрирующая концепцию извлечения второго объекта на прямой дороге.
[ФИГ. 13B] Фиг. 13B - пояснительная диаграмма, иллюстрирующая концепцию извлечения второго объекта на прямой дороге.
[ФИГ. 13C] Фиг. 13C - пояснительная диаграмма, иллюстрирующая концепцию извлечения второго объекта на прямой дороге.
[ФИГ. 14A] Фиг. 14A - пояснительная диаграмма, иллюстрирующая объект, поведение которого должно быть спрогнозировано.
[ФИГ. 14B] Фиг. 14B - пояснительная диаграмма, иллюстрирующая объект, поведение которого должно быть спрогнозировано.
[ФИГ. 15A] Фиг. 15A - пояснительная диаграмма, иллюстрирующая пример исключения объекта из извлечения.
[ФИГ. 15B] Фиг. 15B - пояснительная диаграмма, иллюстрирующая пример исключения объекта из извлечения.
[ФИГ. 15C] Фиг. 15C - пояснительная диаграмма, иллюстрирующая пример исключения объекта из извлечения.
Описание вариантов осуществления
[0009]
Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи. На иллюстрациях чертежей одинаковые части обозначены одинаковыми ссылочными позициями, и их описание опущено.
[0010]
Со ссылкой на фиг. 1 будет описана структура аппаратуры прогнозирования поведения согласно настоящему варианту осуществления. Аппаратура прогнозирования поведения включает в себя устройство 1 обнаружения объекта, устройство 4 оценки позиции главного транспортного средства, устройство 5 получения карты, устройство 6 получения правил дорожного движения и микрокомпьютер 50.
[0011]
Аппаратура прогнозирования поведения может применяться к транспортному средству с функцией автоматического вождения или, альтернативно, может применяться к транспортному средству без функции автоматического вождения. Дополнительно, аппаратура прогнозирования поведения может применяться к транспортному средству, способному переключаться между автоматическим и ручным вождением. В дальнейшем транспортное средство, применяемое с аппаратурой прогнозирования поведения, упоминается как главное транспортное средство.
[0012]
Автоматическое вождение указывает на состояние, в котором, например, по меньшей мере, любой из исполнительных механизмов, таких как тормоз, акселератор и рулевое управление, управляется без оперирования пассажиром. Следовательно, никаких проблем не возникает, даже если другие исполнительные механизмы приводятся в действие в результате операции пассажиром. Кроме того, автоматическое вождение может быть состоянием, в котором выполняется любое управление, такое как управление ускорением/замедлением и управление поперечной позицией. Кроме того, ручное вождение согласно настоящему варианту осуществления указывает, например, состояние, в котором тормоз, акселератор и рулевое управление управляются пассажиром.
[0013]
Устройство 1 обнаружения объектов имеет множество датчиков обнаружения объектов, таких как лазерный радар, радар миллиметрового диапазона и камеру, установленную на его главном транспортном средстве. Устройство 1 обнаружения объектов обнаруживает объекты вокруг главного транспортного средства с помощью множества датчиков обнаружения объектов. Устройство 1 обнаружения объектов обнаруживает движущиеся объекты, в том числе другие транспортные средства, мотоциклы, велосипеды и пешеходы, а также стационарные объекты, в том числе припаркованные транспортные средства и здания. Например, устройство 1 обнаружения объектов обнаруживает позиции, ориентации (углы рыскания), размеры, скорости, ускорения, замедления и скорости рыскания движущихся объектов и стационарных объектов относительно главного транспортного средства.
[0014]
Устройство 4 оценки позиции главного транспортного средства измеряет абсолютную позицию главного транспортного средства с использованием метода оценки позиции, такого как GPS (глобальная система позиционирования) и одометрия. Устройство 4 оценки позиции главного транспортного средства измеряет абсолютную позицию транспортного средства, то есть позицию главного транспортного средства относительно предопределенной опорной точки, скорость транспортного средства, ускорение, угол поворота рулевого колеса и ориентация (угловое положение) главного транспортного средства с помощью датчика обнаружения позиции. Устройство 4 оценки позиции главного транспортного средства включает в себя датчик для получения поведения главного транспортного средства, такой как приемник GPS, инерциальное навигационное оборудование, датчики, подсоединенные к педали тормоза и педали акселератора, и датчик скорости колеса и датчик скорости рыскания, лазерный радар, камера и тому подобное.
[0015]
Устройство 5 получения карты получает информацию карты, указывающую структуру дороги, по которой перемещается главное транспортное средство. Информация карты, полученная устройством 5 получения карты, включает в себя дорожные структуры, такие как окружающая среда дороги (дорожные условия), абсолютная позиция каждой полосы движения, взаимосвязь в отношении того, как полосы движения соединяются, и взаимосвязь в отношении относительных позиций, правила дорожного движения, дорожные знаки и т.п. Информация о карте, полученная устройством 5 получения карты, также включает в себя фрагменты информации об объектах на автостоянках, заправочных станциях и т.п. Устройство 5 получения карты может иметь базу данных карт, хранящуюся с информацией карты, или, альтернативно, может получать информацию карты с внешнего сервера картографических данных с использованием облачных вычислений. Устройство 5 получения карты может получать информацию карты посредством связи между транспортными средствами и связи дорожного транспортного средства.
[0016]
Устройство 6 получения правил дорожного движения получает правила дорожного движения, наложенные на главное транспортное средство, на основе окружающей среды, знаков и т.п. дороги, по которой перемещается главное транспортное средство. Устройство 6 получения правил дорожного движения включает в себя устройство связи, камеру и т.п., и получает данные окружающей среды, знаки и т.п. этой дороги, используя фрагменты информации, полученные посредством связи между транспортными средствами или связи дорожного транспортного средства, или фрагментов информации, полученной с камеры, и тому подобное. Устройство 6 получения правил дорожного движения получает правила дорожного движения, которые должны применяться к главному транспортному средству, на основе полученных данных окружающей среды, полученных знаков и тому подобного этой дороге. Если устройство 5 получения карты может получать правила дорожного движения как одну из фрагментов информации карты, устройство 6 получения правил дорожного движения может быть заменено устройством 5 получения карты.
[0017]
Микрокомпьютер 50 прогнозирует поведения объектов (обычно движущихся объектов), присутствующих вокруг главного транспортного средства, на основе результатов обнаружения устройством 1 обнаружения объектов, результатов оценки устройством 4 оценки позиции главного транспортного средства, результатов получения устройством 5 получения карты и результатов получения устройством 6 получения правил дорожного движения. Микрокомпьютер 50 управляет состоянием перемещения главного транспортного средства на основе прогнозируемых поведений объектов.
[0018]
Прогнозирование поведения согласно настоящему варианту осуществления - это прогнозирование поведений объекта, который влияет на поведения главного транспортного средства (в дальнейшем именуемого «первым объектом»). Кроме того, прогнозирование поведения согласно настоящему варианту осуществления - это прогнозирование поведений второго объекта, который влияет на поведения первого объекта, и прогнозирование поведений первого объекта на основе поведений второго объекта.
[0019]
Микрокомпьютер 50 представляет собой микрокомпьютер общего назначения, включающий в себя ЦП (центральный процессор), память и блок ввода/вывода. В микрокомпьютер установлена компьютерная программа (программа прогнозирования поведения), которая заставляет микрокомпьютер функционировать в качестве аппаратуры прогнозирования поведения. Выполняя компьютерную программу, микрокомпьютер функционирует как множество схем обработки информации аппаратуры прогнозирования поведения. Настоящий вариант осуществления показывает пример, в котором множество схем обработки информации аппаратуры прогнозирования поведения реализованы с помощью программного обеспечения. Однако также возможно сконфигурировать каждую схему обработки информации, подготовив каждое выделенное оборудование для выполнения каждого информационного процесса, описанного ниже. Кроме того, множество схем обработки информации может быть сконфигурировано отдельными частями аппаратного обеспечения.
[0020]
Микрокомпьютер 50 включает в себя в качестве множества схем обработки информации блок 2 интеграции обнаружения, блок 3 отслеживания объекта, блок 7 оценки позиции на карте, блок 10 прогнозирования поведения и блок 20 управления транспортным средством.
[0021]
Блок 2 интеграции обнаружения интегрирует множество результатов обнаружения, полученных от соответствующего множества датчиков обнаружения объектов устройства 1 обнаружения объектов, и выводит результат обнаружения для каждого объекта. В частности, принимая во внимание характеристику ошибки и т.п. каждого датчика обнаружения объекта, блок 2 интеграции обнаружения вычисляет разумное поведение объекта, в котором ошибка становится наименьшей, на основе поведений объектов, полученных от соответствующих датчиков обнаружения объектов. В частности, с использованием известного метода объединения датчиков блок 2 интеграции обнаружения всесторонне оценивает результаты обнаружения, полученные от множества датчиков обнаружения объектов, а затем получает точные результаты обнаружения.
[0022]
Блок 3 отслеживания объекта отслеживает объект, обнаруженный блоком 2 интеграции обнаружения. В частности, блок 3 отслеживания объектов проверяет (ассоциирует) на основе поведений объектов, выводимых в разное время, идентичны ли объекты, выводимые в разное время, и отслеживает выведенные объекты на основе ассоциации.
[0023]
Блок 7 оценки позиции на карте оценивает позицию и направление главного транспортного средства на карте из абсолютной позиции главного транспортного средства, полученной устройством 4 оценки позиции главного транспортного средства, и информации карты, полученной устройством 5 получения карты. Блок 7 оценки позиции на карте оценивает, на какой полосе движения перемещения находится главное транспортное средство.
[0024]
Блок 10 прогнозирования поведения прогнозирует поведения объектов, присутствующих вокруг главного транспортного средства. Блок 10 прогнозирования поведения включает в себя блок 11 получения кандидата курса, блок 12 получения курса, блок 13 получения окружающей среды передвижения, блок 14 извлечения объекта и блок 15 прогнозирования.
[0025]
Блок 11 получения кандидата курса вычисляет кандидата курса для объекта на основе информации карты, результатов обнаружения объектов, присутствующих вокруг главного транспортного средства, информации о позициях главного транспортного средства и правил дорожного движения. Кандидат курса объекта - это кандидат курса, выбираемый этим объектом.
[0026]
Блок 12 получения курса получает курс главного транспортного средства. Например, блок 12 получения курса получает информацию маршрута, заданную в навигационном устройстве (не показано), а затем получает курс главного транспортного средства из информации маршрута. Блок 12 получения курса может вычислить курс главного транспортного средства на основе информации о пункте назначения и информации карты.
[0027]
Блок 13 получения окружающей среды перемещения получает данные окружающей среды дороги, по которой в настоящее время перемещается главное транспортное средство, на основе информации о позиции главного транспортного средства, информации карты и т.п. Окружающая среда дороги указывает типы дорог, такие как скоростные автомагистрали, точки пересечения и участки слияния, а также состояния транспортных заторов, возникающих на дороге.
[0028]
Блок 14 извлечения объектов извлекает целевой объект, поведение которого должно быть спрогнозировано из объектов, присутствующих вокруг главного транспортного средства, на основе кандидата курса объекта, курса и состояния перемещения главного транспортного средства, окружающей среды дороги главного транспортного средства, правил дорожного движения и тому подобного. В частности, блок 14 извлечения объектов указывает (извлекает) первый объект (первый объект в первый раз), который влияет на поведение главного транспортного средства, из объектов, присутствующих вокруг главного транспортного средства. Кроме того, блок 14 извлечения объекта выполняет процесс извлечения второго объекта, который влияет на поведение первого объекта из множества объектов, присутствующих вокруг первого объекта (процесс прогнозирования). Кроме того, блок 14 извлечения объекта задает извлеченный второй объект как новый первый объект, а затем выполняет процесс извлечения второго объекта (нового второго объекта), который влияет на поведение нового первого объекта (процесс прогнозирования). Таким образом, блок 14 извлечения объекта многократно извлекает второй объект, который является целевым объектом, поведение которого должно быть спрогнозировано заранее предопределенное количество раз извлечения, которое определяется заранее.
[0029]
Блок 15 прогнозирования выполняет процесс прогнозирования поведения второго объекта, извлеченного блоком 14 извлечения объекта (процесс прогнозирования), каждый раз, когда извлекается целевой объект, поведение которого должно быть спрогнозировано, чтобы многократно делать прогнозирование предопределенное количество раз извлечения, которое определяется заранее. Кроме того, блок 15 прогнозирования прогнозирует поведение первого объекта, указанного в первый раз (первый объект в первый раз), на основе поведения n (n: натуральные числа, соответствующие количеству раз извлечения) вторых объектов, подвергшихся процессу прогнозирования.
[0030]
Блок 20 управления транспортным средством управляет главным транспортным средством на основе поведения первого объекта, предсказанного блоком 10 прогнозирования поведения. Блок 20 управления транспортным средством управляет различными исполнительными механизмами (исполнительным механизмом рулевого управления, исполнительным механизмом педали акселератора, исполнительным механизмом тормоза и т.п.) главного транспортного средства для выполнения автоматического управления перемещением или управления поддержки вождения (например, управления замедлением).
[0031]
В настоящем варианте осуществления микрокомпьютер 50 имеет функции блока 20 управления транспортным средством, и, таким образом, аппаратура прогнозирования поведения может применяться как аппаратура управления транспортным средством. Однако аппаратура прогнозирования поведения может быть обеспечена только функциями прогнозирования поведений объектов, присутствующих вокруг главного транспортного средства, вместо того, чтобы иметь функции блока 20 управления транспортным средством.
[0032]
Далее со ссылкой на фиг. 2 будут описаны процедуры процессов прогнозирования поведений согласно настоящему варианту осуществления. Процедуры процессов вызываются рассмотрением включения выключателя зажигания (IGN) как триггера и выполняются микрокомпьютером 50. Если главное транспортное средство является электрическим транспортным средством, включение выключателя питания может использоваться в качестве триггера вместо включения выключателя зажигания в качестве триггера.
[0033]
Сначала на этапе S10 блок 2 интеграции обнаружения получает от устройства 1 обнаружения объектов информацию объектов, которая представляет собой информацию об объектах, присутствующих вокруг главного транспортного средства. После получения информации объектов блок 2 интеграции обнаружения вычисляет поведения объектов на основе информации объектов. Блок 3 отслеживания объектов отслеживает объекты, обнаруженные блоком 2 интеграции обнаружения.
[0034]
На этапе S11 блок 7 оценки позиции на карте получает информацию о позициях главного транспортного средства от устройства 4 оценки позиции главного транспортного средства.
[0035]
На этапе S12 блок 7 оценки позиции на карте получает информацию карты. Блок 7 оценки позиции на карте вычисляет информацию о позиции главного транспортного средства на карте, то есть о том, по какой полосе движения перемещается главное транспортное средство, и направление главного транспортного средства на полосе перемещения. Блок 11 получения кандидата курса вычисляет информацию о позициях объектов на карте, то есть о позициях (полос движения, тротуара и т.п.) и направлениях объектов на карте на основе информации о позиции главного транспортного средства и информации об объектах, находящихся вокруг главного транспортного средства. Блок 11 получения кандидата курса получает информацию о полосах движения, в основном об объектах, включенных в некоторый диапазон, и правилах дорожного движения. Блок 11 получения кандидатов курса может вычислять кандидатов курса для объектов на основе фрагментов информации.
[0036]
На этапе S13 блок 12 получения курса получает курс главного транспортного средства на карте. Блок 12 получения курса может получать курс главного транспортного средства из информации маршрута, заранее заданной для навигационного устройства или тому подобного. В качестве альтернативы блок 12 получения курса может вычислить информацию маршрута на основе информации о пункте назначения, чтобы получить курс.
[0037]
На этапе S14 блок 12 получения курса получает состояние перемещения главного транспортного средства. В качестве состояния перемещения получают, по меньшей мере, скорость транспортного средства и угол поворота рулевого колеса.
[0038]
На этапе S15 блок 14 извлечения объектов задает количество раз извлечения на основе окружающей среды дороги. Количество раз извлечения - это количество раз, когда процесс прогнозирования повторяется для второго объекта. Со ссылкой на фиг. 3 будут описаны подробности процесса задания количества раз извлечения.
[0039]
На этапе S30 блок 13 получения окружающей среды перемещения получает тип дороги, по которой перемещается главное транспортное средство, на основе информации о позиции главного транспортного средства и информации карты.
[0040]
На этапе S31 блок 13 получения окружающей среды перемещения определяет, перемещается ли главное транспортное средство по скоростной автомагистрали. Если главное транспортное средство перемещается по скоростной автомагистрали, это определяется как ДА на этапе S31, и процесс переходит к этапу S33. С другой стороны, если главное транспортное средство перемещается по обычной дороге, а не по скоростной автомагистрали, это определяется как НЕТ на этапе S31, и процесс переходит к этапу S32.
[0041]
На этапе S32 блок 13 получения окружающей среды перемещения определяет, присутствует ли точка пересечения впереди главного транспортного средства. Блок 13 получения окружающей среды перемещения определяет, присутствует ли точка пересечения, на основании, например, времени, необходимого для достижения главным транспортным средством центра точки пересечения, или расстояния между главным транспортным средством и центром точки пересечения. Если точка пересечения присутствует впереди главного транспортного средства, это определяется как ДА на этапе S32, и процесс переходит к этапу S35. С другой стороны, если точка пересечения отсутствует перед главным транспортным средством, это определяется как НЕТ на этапе S32, и процесс переходит к этапу S33.
[0042]
На этапе S33 блок 13 получения окружающей среды перемещения определяет, присутствует ли слияние полос движения впереди главного транспортного средства. Если главное транспортное средство перемещается по главной дороге участка слияния, блок 13 получения окружающей среды перемещения получает информацию, указывающую, что место, где сливающиеся полосы движения сливаются, присутствует в предопределенном диапазоне перед главным транспортным средством. В качестве альтернативы, если главное транспортное средство перемещается по сливающейся полосе движения на участке слияния, блок 13 получения окружающей среды перемещения получает информацию, указывающую, что место, где сливающаяся полоса сливается с главной дорогой, присутствует в предопределенном диапазоне впереди главного транспортного средства.
[0043]
На этапе S34 блок 13 получения окружающей среды перемещения получает ситуации транспортных заторов, возникающих вокруг главного транспортного средства.
[0044]
На этапе S35 блок 13 получения окружающей среды перемещения задает количество раз извлечения. Степень сложности из-за пересечения объектов различается в зависимости от окружающей среды дороги. Обычно, когда главное транспортное средство перемещается по обычной дороге, в дополнение к транспортным средствам и мотоциклам пересекаются различные объекты, такие как пешеходы и велосипеды. Следовательно, степень сложности из-за пересечения объектов выше, когда главное транспортное средство перемещается по обычной дороге, чем когда главное транспортное средство перемещается по скоростной автомагистрали, на которой типы проходимых объектов ограничены. Кроме того, если главное транспортное средство перемещается по обычной дороге, а также перемещается в точке пересечения, различные объекты, такие как встречные транспортные средства и пешеходы, идущие по пешеходному переходу, пересекаются, когда главное транспортное средство намеревается повернуть направо или налево, в дополнение к другим транспортным средствам, перемещающимся в том же направлении, и пешеходам, идущим по обочине дороги. Следовательно, степень сложности из-за пересечения объектов выше, когда главное транспортное средство находится в точке пересечения, чем когда главное транспортное средство перемещается по прямым дорогам (общим дорогам, за исключением точек пересечения). Другими словами, степень сложности из-за пересечения объектов означает степень пересечения (количество пересечений) кандидатов курса объектов, которая, согласно прогнозам, может произойти в дорожной среде.
[0045]
Поскольку степень сложности из-за пересечения объектов высока, количество раз извлечения процесса прогнозирования больше увеличивается, и это позволяет прогнозировать ситуацию вокруг главного транспортного средства в долгосрочной перспективе, поскольку можно рассматривать взаимное влияние между большим количеством объектов. Следовательно, блок 13 получения окружающей среды перемещения задает количество раз извлечения на основе степени сложности из-за пересечения объектов, вызванного окружающей средой дороги, по которой перемещается главное транспортное средство. В частности, блок 13 получения окружающей среды перемещения задает количество раз извлечения, которое нужно уменьшить в порядке убывания, точки пересечения, обычной дороги и скоростных автомагистралей. Например, оно задано так, что процесс выполняется 5 раз для точки пересечения, 3 раза для прямой дороги и 2 раза для скоростной автомагистрали. Кроме того, даже если существуют одна и та же среда перемещения, степень сложности из-за пересечения объектов становится ниже в одной из одинаковых окружающих сред перемещения, где главное транспортное средство попадает в транспортный затор, чем в другой из тех же окружающих сред перемещения, в которых главное транспортное средство не попадает в транспортный затор. Поэтому, например, оно задается таким образом, что количество раз извлечения, когда главное транспортное средство попадает в транспортный затор, задается меньшим, чем количество раз извлечения, когда главное транспортное средство не попадает в транспортный затор.
[0046]
Блок 13 получения окружающей среды перемещения хранит данные, определяющие взаимосвязь между окружающей средой дороги, количеством раз извлечений и ситуацией транспортных заторов. Блок 13 получения окружающей среды перемещения задает количество раз извлечений в зависимости от окружающей среды дороги и ситуации транспортных заторов.
[0047]
На этапе S16 блок 14 извлечения объектов задает первую область на основе информации позиции главного транспортного средства и информации карты. Первая область - это область для извлечения первого объекта, который влияет на поведение главного транспортного средства, и задается вокруг главного транспортного средства. Со ссылкой на фиг. 4 будут описаны процедуры процессов для задания первой области.
[0048]
На этапе S40 блок 13 получения окружающей среды перемещения получает количество полос движения дороги, по которым перемещается главное транспортное средство.
[0049]
На этапе S41 блок 13 получения окружающей среды перемещения получает тип дороги, по которой перемещается главное транспортное средство.
[0050]
На этапе S42 блок 13 получения окружающей среды перемещения определяет, перемещается ли главное транспортное средство по скоростной автомагистрали. Если главное транспортное средство перемещается по скоростной автомагистрали, это определяется как ДА на этапе S42, и процесс переходит к этапу S43. С другой стороны, если транспортное средство перемещается по обычной дороге, а не по скоростной автомагистрали, это определяется как НЕТ на этапе S42, и процесс переходит к этапу S44.
[0051]
На этапе S43 блок 13 получения окружающей среды перемещения определяет, присутствует ли разделительная полоса.
[0052]
На этапе S44 блок 13 получения окружающей среды перемещения определяет, присутствует ли точка пересечения впереди главного транспортного средства. Если точка пересечения присутствует впереди главного транспортного средства, это определяется как ДА на этапе S44, и процесс переходит к этапу S45. В качестве альтернативы, если точка пересечения отсутствует впереди главного транспортного средства, это определяется как НЕТ на этапе S44, и процесс переходит к этапу S47.
[0053]
На этапе S45 блок 13 получения окружающей среды перемещения получает типы точек пересечения. Примеры типов точек пересечения включают в себя, например, точку пересечения со светофором, точку пересечения без светофора, круговую развязку, 4-стороняя остановка, точку пересечения со стоп-линией и т.п.
[0054]
На этапе S46 блок 13 получения окружающей среды перемещения получает приоритет в точке пересечения, заданной в правилах дорожного движения, на основе типа точки пересечения и информации о позиции главного транспортного средства. Например, когда сигнал главного транспортного средства является синим в точке пересечения со светофором, блок 14 извлечения объекта определяет, что дорога главного транспортного средства имеет более высокий приоритет, чем пересекающаяся дорога. Кроме того, если стоп-линия присутствует впереди главного транспортного средства в точке пересечения с стоп-линией, блок 14 извлечения объектов определяет, что дорога главного транспортного средства имеет более низкий приоритет, чем пересекающаяся дорога. С другой стороны, если стоп-линия отсутствует перед главным транспортным средством, блок 14 извлечения объектов определяет, что дорога главного транспортного средства имеет более высокий приоритет, чем пересекающаяся дорога. Если курс главного транспортного средства в точке пересечения является поворотом направо, блок 14 извлечения объектов определяет, что полоса движения главного транспортного средства имеет более низкий приоритет, чем встречная прямая полоса.
[0055]
На этапе S47 блок 13 получения окружающей среды перемещения определяет, присутствует ли пешеходный переход впереди главного транспортного средства.
[0056]
На этапе S48 блок 13 получения окружающей среды перемещения определяет, присутствует ли второстепенная дорога впереди главного транспортного средства.
[0057]
На этапе S49 блок 13 получения окружающей среды перемещения получает способ отделения дороги главного транспортного средства и тротуара. Способ отделения включает в себя различные способы, такие как, например, посадка растений, заборы, ограждения и способы отделения.
[0058]
На этапе S50 блок 14 извлечения объектов задает первую область на основе состояния перемещения главного транспортного средства и дорожных условий, полученных на этапах с S40 по S49. В дальнейшем, как задать первую область, будет описано со ссылкой на фиг. 5A - 8D.
[0059]
Со ссылкой на фиг. 5A-6 будет описано, как задать первую область R1, когда главное транспортное средство перемещается по скоростной автомагистрали. На Фиг. 5A-6, полоса движения перемещения обозначена ссылочной позицией L11, встречная полоса движения обозначена ссылочной позицией L21, а главное транспортное средство обозначено ссылочной позицией Va. Когда количество полос движения больше одной, полосы движения обозначены ссылочными позициями L11 и L12, а встречные полосы движения обозначены ссылочными позициями L21 и L22. Также предполагается, что главное транспортное средство Va перемещается по полосе L11 движения со стороны, наиболее близкой к обочине дороги.
[0060]
Сначала будет описан диапазон влево-вправо первой области R1. В основном, блок 14 извлечения объектов задается в качестве первой области R1, диапазон, включающий в себя полосу движения перемещения главного транспортного средства Va, вторую полосу движения, смежную со стороной встречной полосы движения, если смотреть со стороны полосы движения перемещения, и третью полосу движения, смежную со стороной встречной полосы движения, если смотреть со второй полосы движения на основе полосы движения перемещения, по которой перемещается транспортное средство Va. Например, в случае дороги, имеющей 3 полосы движения с каждой стороны, как показано на фиг. 5A, 3 полосы L11, L12 и L13 движения перемещения, образуют первую зону R1.
[0061]
Как показано на фиг. 5B, когда третья полоса движения, наиболее удаленная от главного транспортного средства Va, включает в себя встречную полосу движения, первая область R1 задается как диапазон, включающий в себя встречную полосу L22 движения, ближайшую к главному транспортному средству Va. В качестве альтернативы, как показано на фиг. 5C, если присутствует разделительная полоса L30, первая область R1 задается как диапазон, не включающий в себя встречную полосу движения.
[0062]
Далее будет описан диапазон вперед-назад первой области R1. Блок 14 извлечения объектов задает в качестве первой области R1 диапазон от главного транспортного средства Va до позиции, которая находится впереди главного транспортного средства Va и удалена от главного транспортного средства Va на расстояние, на котором TTC (время до столкновения) равно или меньше предопределенного времени. Например, если TTC установлен на 5 секунд, а главное транспортное средство Va задано перемещаться со скоростью 80 км/ч, первая область R1 имеет расстояние от позиции главного транспортного средства Va до позиции, которая находится впереди главного транспортного средства Va и удалена от главного транспортного средства Va примерно на 100 м. Расстояние назад от главного транспортного средства Va задается в соответствии с курсом главного транспортного средства Va. Например, если главное транспортное средство Va намеревается сменить полосу движения в качестве курса, необходимо рассматривать в качестве первого объекта другое транспортное средство, перемещающееся по полосе движения, на которую главное транспортное средство Va движется после смены полосы движения, и другое транспортное средство, входящее на полосу движения, на которую движется главное транспортное средство Va после смены полосы движения. Следовательно, как показано на фиг. 6, блок 14 извлечения объектов задает в качестве первой области R1 расстояние от позиции главного транспортного средства Va до позиции, которая находится позади главного транспортного средства Va и удалена от главного транспортного средства Va на расстояние, на котором TTC равно или меньше предопределенного времени (например, 3 секунды).
[0063]
Со ссылкой на фиг. 7A и 7B будет описано, как задать первую область R1, когда главное транспортное средство входит в точку пересечения без светофора. Фиг.7A и 7B иллюстрируют дорогу Sa, имеющую полосу движения перемещения, по которой перемещается главное транспортное средство Va, и встречную полосу движения, пересекающуюся дорогу Sb, пересекающую дорогу Sa, и главное транспортное средство Va.
[0064]
Сначала будет описан диапазон вперед-назад первой области R1. Блок 14 извлечения объектов задает диапазон от позиции главного транспортного средства Va до позиции, которая находится впереди главного транспортного средства Va и удалена на предопределенное опорное расстояние от главного транспортного средства Va, в качестве первой области R1. Опорное расстояние - это расстояние, на котором разница между временем, требуемым для того, чтобы главное транспортное средство Va достигло центра точки пересечения, и временем, требуемым встречным транспортным средством, чтобы достичь центра точки пересечения, равна или меньше, чем определенное время, когда предполагается, что встречное транспортное средство перемещается с той же скоростью, что и главное транспортное средство Va. Например, если расстояние от позиции главного транспортного средства Va до центра точки пересечения составляет 30 м, скорость составляет 10 м/с, а разница во времени составляет 3 секунды, расстояние от центра точки пересечения до встречного транспортного средства - 60 м. Следовательно, блок 14 извлечения объектов задает расстояние от позиции главного транспортного средства Va до позиции, которая находится впереди главного транспортного средства Va и удалена на 90 от главного транспортного средства Va в качестве первой области R1.
[0065]
Далее будет описан диапазон влево-вправо первой области R1. Блок 14 извлечения объектов задает первую область R1 на основе приоритета главного транспортного средства Va в точке пересечения и курса главного транспортного средства Va. Как показано на фиг. 7A, если дорога главного транспортного средства Va имеет более высокий приоритет, блок 14 извлечения объектов задает диапазон, полученный путем добавления предопределенного запаса к пешеходному переходу, пересекающему курс правого поворота главного транспортного средства Va, в качестве первой области R1. Как показано на фиг. 7B, если дорога главного транспортного средства Va имеет более низкий приоритет, блок 14 извлечения объектов задает первую область R1 таким же образом, как и задание диапазона вперед-назад.
[0066]
Со ссылкой на фиг. 8A-8D будет описано, как задать первую область R1, когда главное транспортное средство Va перемещается по прямой дороге или обычной дороге. Сначала будет описан диапазон вперед-назад первой области R1. Блок 14 извлечения объектов задает диапазон от позиции главного транспортного средства Va до позиции, которая находится впереди главного транспортного средства Va и удалена от главного транспортного средства Va на расстояние, на котором TTC равно или меньше, чем предопределенное время, в качестве первой области R1. Например, TTC составляет 3 секунды.
[0067]
Далее будет описан диапазон влево-вправо первой области R1. Длина влево-вправо задается на основе наличия пешеходного перехода, наличия второстепенной дороги и способа отделения от тротуара в дополнение к количеству полос движения, описанному выше. Например, как показано на фиг. 8, блок 14 извлечения объектов задает первую область R1 так, чтобы она включала в себя тротуар L40 вместе с 3 полосами движения, описанными выше. С другой стороны, если диапазон вперед-назад первой области R1 включает в себя пешеходный переход и второстепенную дорогу L50, блок 14 извлечения объектов увеличивает диапазон влево-вправо, чтобы включить пешеходный переход и второстепенную дорогу L50. Как показано на фиг. 8B, если пешеходный переход включен в диапазон вперед-назад, блок 14 извлечения объектов увеличивает ширину влево-вправо области, соответствующей пешеходному переходу. Увеличенная ширина - это ширина, в которой к пешеходному переходу добавляется предопределенный запас (например, 2 метра). Как показано на фиг. 8C, если позиция соединения с второстепенной дорогой L50 включена в диапазон вперед-назад, блок 14 извлечения объектов увеличивает ширину влево-вправо области, соответствующей второстепенной дороге L50. Увеличенная ширина D1 составляет, например, 40 м. Как показано на фиг. 8D, если тротуар L40 и дорога отделены друг от друга, блок 14 извлечения объектов исключает тротуар L40 из первой области R1, чтобы задать первую область R1.
[0068]
Первая область R1 была описана на примере различных окружающих сред дороги. Обратите внимание, что первая область R1, установленная на основе этих способов, иногда становится диапазоном, который превышает диапазон обнаружения устройства 1 обнаружения объекта. В этом случае предпочтительно, чтобы блок 14 извлечения объекта устанавливал первую область R1 с диапазоном обнаружения устройства 1 обнаружения объекта в качестве верхнего предела.
[0069]
На этапе S17 блок 14 извлечения объектов извлекает первый объект, который влияет на поведение главного транспортного средства Va, среди объектов, присутствующих в заданной первой области R1. В частности, блок 12 получения курса получает курс главного транспортного средства. Таким же образом блок 11 получения кандидатов курса вычисляет кандидатов курса для объектов, присутствующих в первой области R1, на основе информации карты, частей информации позиции объектов и правил дорожного движения. Блок 14 извлечения объектов определяет, влияют ли объекты на поведение главного транспортного средства Va, на основании того, пересекает ли курс главного транспортного средства Va кандидаты курса для объектов, присутствующих в первой области R1.
[0070]
Фиг. 9 иллюстрирует сцену перемещения главного транспортного средства Va, входящего в точку пересечения. Два других транспортных средства Vb1 и Vb2, перемещающиеся по встречной полосе движения, и пешеход Pe1 присутствуют вокруг точки пересечения. В первой зоне R1 присутствует другое транспортное средство Vb1, которое является главным транспортным средством, перемещающимся по встречной полосе движения. Курс главного транспортного средства Va - это поворот направо в точке пересечения. В этом случае, если другое транспортное средство Vb1 перемещается прямо, другое транспортное средство Vb1 пересекает курс главного транспортного средства Va, и, таким образом, блок 14 извлечения объектов извлекает другое транспортное средство Vb1 в качестве первого объекта. С другой стороны, пешеход, идущий по пешеходному переходу со стороны поворота налево, не пересекает курс главного транспортного средства Va, и, кроме того, пешеход Pe1 отсутствует в первой зоне R1, и, таким образом, блок извлечения объекта 14 не извлекает пешехода Pe1 в качестве первого объекта.
[0071]
Фиг. 10A и 10B иллюстрируют сцену перемещения главного транспортного средства, перемещающегося по скоростной автомагистрали. На Фиг. 10A и 10B полосы движения перемещения обозначены ссылочными позициями L11-L14, встречные полосы движения обозначены ссылочными позициями L21-L23, разделительная полоса обозначена ссылочной позицией L30, а главное транспортное средство обозначено ссылочной позицией Va. Главное транспортное средство Va перемещается по полосе L11 движения перемещения на стороне, наиболее близкой к обочине дороги, и 6 других транспортных средств с Vb1 по Vb6 присутствуют вокруг главного транспортного средства Va. На Фиг. 10A и 10B, курс главного транспортного средства Va и кандидаты курса других транспортных средств с Vb1 по Vb6 показаны стрелками (кандидаты курса других транспортных средств с Vb1 по Vb6 на фиг. 10B такие же, как и на фиг. 10A, и, таким образом, , показаны только кандидаты курса вперед).
[0072]
Во-первых, предполагается случай, когда главное транспортное средство Va перемещается прямо. Как показано на фиг. 10, блок 14 извлечения объектов задает первую область R1 вокруг главного транспортного средства Va. Блок 14 извлечения объектов извлекает другое транспортное средство Vb4 среди других транспортных средств Vb2, Vb4 и Vb5, присутствующих в первой области R1, в качестве первого объекта. Это связано с тем, что другое транспортное средство Vb4, перемещающееся по полосе L12 движения, имеет кандидат курса для перехода на полосу L11 движения, по которой главное транспортное средство Va перемещается прямо путем смены полосы движения.
[0073]
Далее предполагается случай, когда курс главного транспортного средства Va сдвигается с полосы L11 движения на полосу L12 движения посредством смены полосы движения. Как показано на фиг. 10B, блок 14 извлечения объектов задает первую область R1 вокруг главного транспортного средства Va. Блок 14 извлечения объектов извлекает в качестве первых объектов другие транспортные средства Vb1, Vb2 и Vb4 среди других транспортных средств Vb1, Vb2, Vb4 и Vb5, присутствующих в первой области R1. Это связано с тем, что другие транспортные средства Vb1 и Vb4 будут присутствовать впереди и сзади по отношению к главному транспортному средству Va на полосе L12 движения, на которую главное транспортное средство Va намеревается перейти путем смены полосы движения. Кроме того, причина, по которой другое транспортное средство Vb2 извлекается в качестве первого объекта, заключается в том, что другое транспортное средство Vb2, перемещающееся по полосе L13 движения, имеет кандидат курса для движения на полосу L12 движения, на которую главное транспортное средство Va намеревается перейти путем смены полосы движения.
[0074]
Блок 14 извлечения объектов может извлекать первые объекты, учитывая не только кандидаты курса, но также то, изменяют ли объекты вокруг главного транспортного средства поведение главного транспортного средства Va. Например, как показано на фиг. 11, если другое транспортное средство Vb4 перемещается на полосу L11 движения путем смены полосы движения, другое транспортное средство Vb4 оказывается расположенным впереди главного транспортного средства Va. Блок 14 извлечения объектов прогнозирует позицию въезда, когда другое транспортное средство Vb4 перемещается на полосу L11 движения путем смены полосы движения, и определяет, равно ли относительное расстояние D2 между главным транспортным средством Va и позицией въезда другого транспортного средства Vb4 равным или большим, чем предопределенное значение. Предопределенное значение представляет собой, например, расстояние, на котором TTC составляет 3 секунды. Если относительное расстояние D2 равно или больше предопределенного значения, это означает, что главное транспортное средство Va не замедляется относительно другого транспортного средства Vb4. Следовательно, блок 14 извлечения объектов определяет, что другое транспортное средство Vb4 не влияет на поведение главного транспортного средства Va, и, таким образом, не извлекает другое транспортное средство Vb4 в качестве первого объекта.
[0075]
На этапе S18 блок 14 извлечения объекта задает вторую область R2. Вторая область R2 - это область для извлечения второго объекта, которое влияет на поведение извлеченного первого объекта. Вторая область R2 задается вокруг первого объекта для каждого извлеченного первого объекта. Задание второй области R2 может быть таким же, как задание первой области R1, или, альтернативно, вторая область R2 может быть задана в пределах предопределенного диапазона вокруг первого объекта.
[0076]
На этапе S19 блок 14 извлечения объекта определяет, присутствует ли объект в заданной второй области R2. Если объект присутствует во второй области R2, это определяется как ДА на этапе S19, и процесс переходит к этапу S20. С другой стороны, если объект отсутствует во второй области R2, он определяется как НЕТ на этапе S19, и процесс переходит к этапу S24.
[0077]
В процессах на этапах с S20 по S22 блок 14 извлечения объектов и блок 15 прогнозирования выполняют процесс прогнозирования для извлечения второго объекта среди множества объектов, присутствующих во второй области R2, и прогнозирования поведения извлеченного второго объекта (процесс прогнозирования в первый раз). После извлечения второго объекта и прогнозирования поведения второго объекта блок 14 извлечения объекта задает второй объект, поведение которого было спрогнозировано в предыдущем процессе, как новый первый объект, задает вторую область R2 для нового первого объекта, и прогнозирует поведение второго объекта (нового второго объекта), присутствующего во второй области R2 (новый процесс прогнозирования). Блок 14 извлечения объекта и блок 15 прогнозирования выполняют процесс прогнозирования для извлечения второго объекта и прогнозирования поведения второго объекта, и процесс прогнозирования повторяется предопределенное количество раз (количество раз извлечения). Подробности будут описаны ниже.
[0078]
На этапе S20 блок 14 извлечения объекта извлекает второй объект. Блок 14 извлечения объектов не определяет вторые объекты во всех кандидатах курса первого объекта, но извлекает вторые объекты, ограничивая кандидатов курса кандидатами курса, которые влияют на поведение главного транспортного средства Va.
[0079]
На этапе S21 блок 14 извлечения объекта прогнозирует поведение второго объекта.
[0080]
На этапе S22 блок 14 извлечения объектов определяет, достигает ли количество раз для выполнения процесса прогнозирования извлечения вторых объектов и прогнозирования поведений вторых объектов количество раз извлечения. Если количество раз для выполнения процесса прогнозирования достигает количества раз извлечения, это определяется как ДА на этапе S22, и процесс переходит к этапу S23. С другой стороны, если количество раз для выполнения процесса прогнозирования не достигает количества раз извлечения, это определяется как НЕТ на этапе S22, и процесс возвращается к этапу S20. Затем, на этапе S20, блок 14 извлечения объекта задает второй объект, поведение которого было спрогнозировано в первом процессе прогнозирования (этап S21 в предыдущем процессе), как новый первый объект, и задает вторую область R2 для нового первого объекта на основе того же способа, что и на этапе S18. Блок 14 извлечения объекта извлекает новый второй объект (то есть объект, который влияет на поведение объекта как новый первый объект), присутствующий в заданной второй области R2. Блок 15 прогнозирования прогнозирует поведение нового второго объекта, извлеченного блоком 14 извлечения объекта. Таким образом, процесс задания второй области R2 и процесс прогнозирования поведения второго объекта повторяются.
[0081]
Фиг. 12A-12C иллюстрируют сцену движения главного транспортного средства Va, перемещающегося по скоростной автомагистрали, как на фиг. 10А и 10Б. Как показано на фиг. 12A, блок 14 извлечения объектов извлекает другое транспортное средство Vb4 в качестве первого объекта в первой области R1.
[0082]
Как показано на фиг. 12B, блок 14 извлечения объекта задает вторую область R2 вокруг первого объекта (другого транспортного средства Vb4). В этом примере вторая область R2 задается так, чтобы включать в себя предопределенный диапазон вперед-назад и предопределенный диапазон влево-вправо, и задается таким образом, что другое транспортное средство Vb4 позиционируется в нижнем центре. На фиг. 12B, в качестве кандидата курса для другого транспортного средства Vb4, имеется кандидат курса (показан сплошной линией), в котором другое транспортное средство Vb4 перемещается с полосы L12 движения для перемещения на полосу L11 движения путем смены полосы движения. Блок 14 извлечения объектов извлекает в качестве второго объекта другое транспортное средство, имеющее кандидат курса, по которому другое транспортное средство Vb4 может взять курс, от объектов, присутствующих во второй области R2. В примере, показанном на фиг. 12B, другое транспортное средство Vb5 имеет кандидат курса для движения с полосы L13 движения для перемещения на полосу L12 движения путем смены полосы движения. Под воздействием другого транспортного средства Vb5, движущегося на полосу L12 движения при смене полосы движения, возможно, что другое транспортное средство Vb4 переместится на полосу L11 движения при смене полосы движения. Следовательно, блок 14 извлечения объектов извлекает другое транспортное средство Vb5 в качестве второго объекта.
[0083]
Как показано на фиг. 12C, блок 14 извлечения объекта дополнительно задает второй объект (другое транспортное средство Vb5) как новый первый объект и задает вторую область R2 вокруг этого объекта. В этом примере вторая область R2 установлена так, чтобы включать в себя предопределенный диапазон вперед-назад и предопределенный диапазон влево-вправо, и установлена так, что другое транспортное средство Vb5 расположено в центре. Затем блок 14 извлечения объектов указывает кандидата курса, по которому другое транспортное средство Vb5 в качестве нового первого объекта может взять курс. На фиг. 12C, есть кандидат курса (показан сплошной линией) транспортного средства, движущегося с полосы L13 движения на полосу L12 движения путем смены полосы движения. Блок 14 извлечения объектов извлекает в качестве нового второго объекта другое транспортное средство, у которого есть кандидат курса, по которому другое транспортное средство Vb5 может следовать по курсу, то есть другое транспортное средство, влияющее на поведение другого транспортного средства Vb5, из объектов, присутствующих во второй области R2. В примере, показанном на фиг. 12C, другое транспортное средство Vb6 имеет кандидат курса для перемещения с полосы движения L14 на полосу L13 движения путем смены полосы движения. С другой стороны, другое транспортное средство Vb4 имеет кандидат курса для перемещения прямо по полосе L12 движения перемещения. Под воздействием другого транспортного средства Vb6, движущегося на полосу L13 движения перемещения при смене полосы движения, возможно, что другое транспортное средство Vb5 движется на полосу L12 движения при смене полосы движения. Кроме того, под воздействием расстояния с другим транспортным средством Vb4 возможно, что другое транспортное средство Vb5 движется на полосу L12 движения перемещения путем смены полосы движения. Следовательно, блок 14 извлечения объектов также извлекает другие транспортные средства Vb4 и Vb6 в качестве вторых объектов.
[0084]
Таким образом, извлечение второго объекта также выполняется для объекта (другого транспортного средства Vb5), который напрямую влияет на поведение первого объекта (другого транспортного средства Vb4). В этом случае другое транспортное средство Vb4 является первым объектом, на поведение которого влияет другое транспортное средство Vb5, и также соответствует второму объекту, который влияет на поведение другого транспортного средства Vb5.
[0085]
Фиг. 13A-13C иллюстрируют сцену перемещения главного транспортного средства Va по скоростной автомагистрали. Как показано на фиг. 13A, при извлечении другого транспортного средства Vb1 в качестве первого объекта блок 14 извлечения объекта задает вторую область R2 вокруг первого объекта (другого транспортного средства Vb1). Блок 14 извлечения объектов указывает первого влияющего кандидата курса, который влияет на поведение главного транспортного средства Va, среди кандидатов курса другого транспортного средства Vb1, в качестве первого объекта. На фиг. 13A, кандидат курса для транспортного средства, перемещающегося прямо по полосе L12 движения перемещения, соответствует первому влияющему кандидату курса. Блок 14 извлечения объектов извлекает в качестве второго объекта другое транспортное средство, имеющее кандидат курса, который может влиять на курс первого влияющего кандидата курса другого транспортного средства Vb1, из объектов во второй области R2. В примере, показанном на фиг. 13A, другое транспортное средство Vb2 имеет кандидат курса для движения с полосы L11 движения перемещения для движения на полосу L12 движения перемещения путем смены полосы движения. Под воздействием другого транспортного средства Vb2, движущегося на полосу L12 движения перемещения при смене полосы движения, возможно, что другое транспортное средство Vb1 будет вынуждено замедлить движение. Следовательно, блок 14 извлечения объектов извлекает другое транспортное средство Vb2 в качестве второго объекта.
[0086]
Как показано на фиг. 13B, блок 14 извлечения объекта задает другое транспортное средство Vb2, которое является вторым объектом, извлеченным как объект, влияющий на поведение другого транспортного средства Vb1, в качестве нового первого объекта и дополнительно задает вторую область R2 вокруг этого объекта. Блок 14 извлечения объекта извлекает новый второй объект, который является объектом, влияющим на поведение нового первого объекта (другого транспортного средства Vb2), из объектов, присутствующих во второй области R2. Блок 14 извлечения объектов извлекает другие транспортные средства Vb1 и Vb3, которые являются новыми вторыми объектами, как объекты, влияющие на поведение другого транспортного средства Vb2, на основе кандидатов курса другого транспортного средства Vb2, в качестве нового первого объекта. На фиг. 13B, в качестве кандидата курса другого транспортного средства Vb2, которое является новым первым объектом, имеется кандидат курса (показан сплошной линией) транспортного средства, движущегося с полосы L11 движения перемещения на полосу L12 движения перемещения путем смены полосы движения. Блок 14 извлечения объектов извлекает в качестве нового второго объекта другое транспортное средство, имеющее кандидат курса, который может влиять на курс другого транспортного средства Vb2, из объектов, присутствующих во второй области R2. В примере, показанном на фиг. 13B, каждое из других транспортных средств Vb1 и Vb3 имеет кандидат курса для перемещения прямо по полосе L11 движения перемещения. Под влиянием расстояния между другими транспортными средствами Vb1 и Vb4 возможно, что другое транспортное средство Vb2 переместится на полосу L12 движения путем смены полосы движения. Следовательно, блок 14 извлечения объектов также извлекает другие транспортные средства Vb1 и Vb3 как вторые объекты (см. Фиг. 13C).
[0087]
Таким образом, извлечение второго объекта также выполняется для объекта (другого транспортного средства Vb2), который напрямую влияет на поведение первого объекта (другого транспортного средства Vb1). Отметим, что в этом случае другое транспортное средство Vb2 соответствует первому объекту, на поведение которого влияют другие транспортные средства Vb1 и Vb3, а также соответствует второму объекту, который влияет на поведение другого транспортного средства Vb1.
[0088]
На этапе S23 блок 15 прогнозирования прогнозирует поведения объекта, который задан как первый объект в первый раз, на основе поведений n вторых объектов, соответствующих количеству раз извлечения. То есть, блок 15 прогнозирования прогнозирует поведения объекта, который задается как первый объект в первый раз, на основе прогнозируемого поведения второго объекта в каждом из n прогнозов поведения.
[0089]
Фиг. 14A иллюстрирует результаты извлечения первого объекта и второго объекта, извлеченных в примерах на фиг. с 12a по 12c. То есть в примерах на фиг. 12A-12C, первый объект, непосредственно влияющий на поведение главного транспортного средства Va, является другим транспортным средством Vb4, а вторые объекты, косвенно влияющие на поведение главного транспортного средства Va, являются транспортными средствами Vb5 и Vb6. Кроме того, фиг. 14B иллюстрирует результаты извлечения первого объекта и второго объекта, извлеченных в примерах на фиг. с 13a по 13c. То есть в примерах на фиг. 13A-13C, первый объект, прямо или косвенно влияющий на поведение главного транспортного средства Va, является другим транспортным средством Vb1, а вторые объекты, косвенно влияющие на поведение главного транспортного средства Va, являются транспортными средствами Vb2 и Vb3.
[0090]
На этапе S24 блок 20 управления транспортным средством управляет главным транспортным средством на основе прогнозируемого поведения первого объекта.
[0091]
На этапе S25 блок 15 прогнозирования определяет, выключен ли выключатель зажигания. Если выключатель зажигания выключен, на этапе S25 определяется ДА, и последовательность процессов завершается (END). С другой стороны, если переключатель зажигания (IGN) включен, он определяется как НЕТ на этапе S25, и процесс возвращается к этапу S10.
[0092]
Как описано выше, способ прогнозирования поведения и аппаратура прогнозирования поведения согласно настоящему варианту осуществления определяют первый объект, который влияет на поведение главного транспортного средства Va среди объектов вокруг главного транспортного средства Va. Кроме того, способ прогнозирования поведения и аппаратура прогнозирования поведения согласно настоящему варианту осуществления выполняют процесс прогнозирования (первый процесс прогнозирования) извлечения второго объекта, влияющего на поведение первого объекта, среди множества объектов, присутствующих вокруг первого объекта, и прогнозирование поведения объекта. После этого, после задания объекта, извлеченного в качестве второго объекта, в качестве нового первого объекта, процесс прогнозирования (новый процесс прогнозирования) извлечения нового второго объекта влияет на поведение нового первого объекта среди множества объектов, присутствующих вокруг нового первого объекта, и прогнозирование поведения объекта. Затем процесс прогнозирования извлечения второго объекта и прогнозирования поведения второго объекта повторяется предопределенное количество раз извлечения. Соответственно, в способе прогнозирования поведения и аппаратуре прогнозирования поведения согласно настоящему варианту осуществления поведение объекта как первого объекта в первый раз (первого объекта в первом процессе прогнозирования) прогнозируется на основе поведений n (n: натуральные числа, соответствующие количеству извлечений) вторых объектов, подвергнутых процессу прогнозирования.
[0093]
Согласно этому способу поведения первого объекта прогнозируются путем дополнительного учета влияния, принятого первым объектом от объектов вокруг первого объекта. Это позволяет прогнозировать поведение первого объекта с высокой точностью и прогнозировать ситуацию вокруг главного транспортного средства Va в долгосрочной перспективе.
[0094]
Вдобавок, даже если количество объектов, присутствующих вокруг главного транспортного средства Va, велико, количество раз, когда выполняется процесс прогнозирования, ограничивается максимальным количеством раз извлечения. Это может уменьшить рабочую нагрузку и время работы по сравнению со случаем, когда процесс прогнозирования выполняется большее количество раз, чем количество раз извлечения. Таким образом, это может уменьшить рабочую нагрузку и время работы при достижении высокой точности прогнозирования.
[0095]
В способе согласно настоящему варианту осуществления главное транспортное средство Va может управляться на основе прогнозируемого поведения первого объекта.
[0096]
Согласно этому способу можно управлять главным транспортным средством Va, принимая во внимание ситуацию вокруг главного транспортного средства Va в долгосрочной перспективе. Это дает возможность надлежащего управления главным автомобилем Va.
[0097]
В способе согласно настоящему варианту осуществления первая область R1 может быть задана вокруг главного транспортного средства Va на основе состояния движения главного транспортного средства Va или окружающей среды дороги, и первый объект может быть указан из объектов, присутствующих в первой области R1.
[0098]
Согласно этому способу область ограничена первой областью R1 для указания первого объекта, и, таким образом, первый объект может быть указан после выбора этого объекта. Это может снизить рабочую нагрузку и время работы при достижении высокой точности прогнозирования. Кроме того, диапазон первой области R1 задается в соответствии с состоянием движения главного транспортного средства Va и окружающей средой дороги, и, таким образом, можно надлежащим образом охватить диапазон, в котором объект, влияющий на поведение главного транспортного средства Va присутствует. Соответственно, может быть достигнута высокая точность прогнозирования.
[0099]
Кроме того, в способе согласно настоящему варианту осуществления диапазон вперед-назад первой области R1 может быть задан в зависимости от скорости главного транспортного средства Va.
[0100]
Согласно этому способу диапазон движения вперед-назад первой области R1 может быть оптимизирован в зависимости от скорости главного транспортного средства Va. Соответственно, может быть достигнута высокая точность прогнозирования, поскольку можно надлежащим образом охватить диапазон, в котором присутствует объект, влияющий на поведение главного транспортного средства Va.
[0101]
В способе согласно настоящему варианту осуществления окружающая среда дороги главного транспортного средства Va представляет собой окружающую среду, в которой точка пересечения присутствует перед главным транспортным средством Va. В этом случае в способе согласно настоящему варианту осуществления диапазон влево-вправо первой области R1 может быть установлен на основе приоритета в точке пересечения, заданной в правилах дорожного движения.
[0102]
Согласно этому способу диапазон влево-вправо первой области R1 может быть оптимизирован на основе приоритета в точке пересечения. В результате может быть достигнута высокая точность прогнозирования, поскольку можно надлежащим образом охватить диапазон, в котором присутствует объект, влияющий на поведение главного транспортного средства Va.
[0103]
В способе согласно настоящему варианту осуществления диапазон влево-вправо первой области R1 может быть шире, когда дорога Sa главного транспортного средства Va имеет более низкий приоритет, чем пересекающая дорога Sb, чем когда дорога Sa главного транспортного средства Va имеет более высокий приоритет, чем пересекающая дорога Sb.
[0104]
Когда объект входит на приоритетную дорогу с неприоритетной дороги, объект должен отдать приоритет движению транспорта на приоритетной дороге. Следовательно, если приоритет главного транспортного средства Va низкий, можно соответствующим образом охватить диапазон, в котором присутствует объект, влияющий на поведение главного транспортного средства Va, путем увеличения диапазона влево-вправо в этой области. Соответственно, может быть достигнута высокая точность прогнозирования.
[0105]
Если приоритет дороги главного транспортного средства Va неясен, диапазон влево-вправо первой области R1 может быть шире, когда приоритет дороги главного транспортного средства Va неясен, чем когда дорога Sa главного транспортного средства Va имеет более высокий приоритет, чем пересекающая дорога Sb.
[0106]
Если приоритет дороги главного транспортного средства Va неясен, предположение о том, что приоритет пересекающей дороги выше, будет лучше способствовать безопасности. Следовательно, если приоритет неясен, увеличивая диапазон влево-вправо этой области до относительно большого, можно соответствующим образом охватить диапазон, в котором присутствует объект, влияющий на поведение главного транспортного средства Va. Соответственно, может быть достигнута высокая точность прогнозирования.
[0107]
В способе согласно настоящему варианту осуществления окружающая среда дороги главного транспортного средства Va- представляет собой прямую дорогу. В этом случае в способе согласно настоящему варианту осуществления диапазон влево-вправо первой области R1 может быть задан на основе структуры обочины прямой дороги или того, присутствует ли пешеходный переход для пересечения прямой дороги.
[0108]
Согласно этому способу диапазон влево-вправо первой области R1 может быть оптимизирован в зависимости от структуры прямой дороги. В результате может быть достигнута высокая точность прогнозирования, поскольку можно надлежащим образом охватить диапазон, в котором присутствует объект, влияющий на поведение главного транспортного средства Va.
[0109]
Кроме того, в способе согласно настоящему варианту осуществления диапазон влево-вправо первой области R1 может быть задан на основе количества полос движения дороги, по которой перемещается главное транспортное средство Va.
[0110]
Согласно этому способу диапазон влево-вправо первой области R1 может быть оптимизирован в зависимости от количества полос движения дороги. В результате может быть достигнута высокая точность прогнозирования, поскольку можно надлежащим образом охватить диапазон, в котором присутствует объект, влияющий на поведение главного транспортного средства Va.
[0111]
В способе согласно настоящему варианту осуществления количество раз извлечения может быть задано на основе степени сложности из-за пересечения объектов, вызванного окружающей средой дороги, по которой перемещается главное транспортное средство Va.
[0112]
Взаимные влияния между объектами меняются в зависимости от степени сложности из-за пересечения каждого объекта. Следовательно, принимая во внимание эту степень сложности, процесс прогнозирования может выполняться столько раз, сколько подходит для окружающей среды дороги. Таким образом, при прогнозировании поведения первого объекта влияние второго объекта может быть соответствующим образом отражено в прогнозе поведения. В результате поведение первого объекта может быть спрогнозировано с высокой точностью, а ситуация вокруг главного транспортного средства Va может быть предсказана в долгосрочной перспективе.
[0113]
В способе согласно настоящему варианту осуществления количество раз извлечения может быть меньше, когда главное транспортное средство Va перемещается по скоростной автомагистрали, чем когда главное транспортное средство Va перемещается по обычной дороге.
[0114]
На скоростных автомагистралях с меньшим количеством пересекающихся дорог степень сложности движения обычно ниже, чем на обычных дорогах. Следовательно, даже если количество извлечений для скоростной автомагистрали задано меньшим, чем для обычной дороги, влияние второго объекта может быть соответствующим образом отражено. В результате поведения первого объекта могут быть спрогнозированы с высокой точностью, и ситуация вокруг главного транспортного средства Va может быть предсказана в долгосрочной перспективе.
[0115]
В способе согласно настоящему варианту осуществления количество раз извлечений больше, когда главное транспортное средство Va перемещается в точке пересечения, чем когда главное транспортное средство Va перемещается по прямой дороге.
[0116]
Окружающая среда с точкой пересечения обычно имеет более высокую степень сложности трафика, чем окружающая среда без точки пересечения. Следовательно, влияние второго объекта может быть надлежащим образом отражено путем увеличения числа раз извлечения среды с точкой пересечения, чтобы она была больше, чем для окружающей среды без точки пересечения. В результате поведение первого объекта может быть спрогнозировано с высокой точностью, а ситуация вокруг главного транспортного средства Va может быть предсказана в долгосрочной перспективе.
[0117]
В способе согласно настоящему варианту осуществления указанное количество раз может быть меньше, когда главное транспортное средство Va перемещается по участку без слияния, чем когда главное транспортное средство Va перемещается по участку слияния.
[0118]
Окружающая среда с участком слияния обычно имеет более высокую степень сложности трафика, чем окружающая среда без участка слияния. Следовательно, влияние второго объекта может быть надлежащим образом отражено путем увеличения количества извлечений окружающей среды с участком слияния, чтобы оно было больше, чем для окружающей среды без участка слияния. В результате поведения первого объекта могут быть спрогнозированы с высокой точностью, и ситуация вокруг главного транспортного средства Va может быть предсказана в долгосрочной перспективе.
[0119]
В способе согласно настоящему варианту осуществления указанное количество раз может быть меньше, когда транспортный затор не происходит, чем когда транспортный затор возникает.
[0120]
Степень сложности трафика (движения транспорта), как правило, ниже в окружающей среде, где происходит транспортный затор, чем в окружающей среде, где транспортного затора нет. Следовательно, даже если предопределенное количество раз, когда возникает транспортный затор, задано меньшим, чем количество раз, когда транспортный затор не возникает, влияние второго объекта может быть соответствующим образом отражено. В результате поведение первого объекта может быть спрогнозировано с высокой точностью, а ситуация вокруг главного транспортного средства Va может быть предсказана в долгосрочной перспективе.
[0121]
В настоящем варианте осуществления блок 14 извлечения объекта может исключать из извлечения в качестве второго объекта объект, имеющий относительно низкое влияние на поведение первого объекта, из объектов, присутствующих во второй области R2.
[0122]
Фиг. 15A иллюстрирует сцену перемещения главного транспортного средства Va, перемещающегося в точке пересечения. Вокруг точки пересечения находятся другие транспортные средства с Vb1 по Vb4, перемещающиеся по полосе движения, смежной с полосой движения, по которой перемещается главное транспортное средство Va, другое транспортное средство Vb5, перемещающееся назад к главному транспортному средству Va, встречное транспортное средство Vc1, перемещающееся по встречной полосе движения, и пешеход Pe1. Курс главного транспортного средства Va - поворот направо в точке пересечения.
[0123]
Если встречное транспортное средство Vc1 перемещается прямо, встречное транспортное средство Vc1 приходит, чтобы пересечь курс главного транспортного средства Va, и, таким образом, блок 14 извлечения объектов извлекает встречное транспортное средство Vc1 как первый объект. Пешеход Pe1 и другие транспортные средства с Vb1 по Vb5 пересекают предполагаемый курс правого поворота встречного транспортного средства Vc1. Соответственно, обычно блок 14 извлечения объектов извлекает пешехода Pe1 и другие транспортные средства с Vb1 по Vb5 как вторые объекты.
[0124]
Однако из-за присутствия другого транспортного средства Vb1 транспортные средства, перемещающиеся назад к другому транспортному средству Vb1, не перемещаются вперед к другому транспортному средству Vb1. Кроме того, даже если какое-либо из других транспортных средств с Vb2 по Vb5 передвигает полосу движения путем смены полосы движения, из-за присутствия главного транспортного средства Va, транспортное средство, которое передвинуло полосу движения путем смены полосы движения, не перемещается вперед с главным транспортным средством Va. Следовательно, другие транспортные средства с Vb2 по Vb5 с меньшей вероятностью пересекут встречный автомобиль Vc1. То есть другие транспортные средства с Vb2 по Vb5 среди пешехода Pe1 и других транспортных средств с Vb1 по Vb5 имеют относительно низкое влияние на поведение первого объекта (встречного транспортного средства Vc1). Следовательно, как показано на фиг. 15B, блок 14 извлечения объекта может исключать из извлечения в качестве второго объекта другие транспортные средства с Vb2 по Vb5, имеющие относительно небольшое влияние на поведение первого объекта.
[0125]
В сцене перемещения, показанной на фиг. 15C, среди других транспортных средств Vb2-Vb4, перемещающихся назад к другому транспортному средству Vb1, расстояние между другими транспортными средствами Vb2 и Vb3 является коротким, и, таким образом, смена полосы движения невозможна. С другой стороны, расстояние между другим транспортным средством Vb4, движущимся назад, и другим транспортным средством Vb3 велико, и, таким образом, другое транспортное средство Vb4 может сменить полосу движения. В этом случае, если другое транспортное средство Vb4 меняет полосу движения, возможно, что другое транспортное средство Vb4 подходит для пересечения предполагаемого курса встречного транспортного средства Vc1. В этом случае другое транспортное средство Vb4 имеет относительно большое влияние на поведение первого объекта (встречного транспортного средства Vc1), и, таким образом, блок 14 извлечения объекта извлекает другое транспортное средство Vb4 в качестве второго объекта.
[0126]
Согласно этому способу второй объект, имеющий большое влияние на поведения первого объекта, извлекается как кандидат на обработку, и, таким образом, влияние второго объекта может быть соответствующим образом отражено. В результате поведения первого объекта можно предсказать с высокой точностью, и поведения первого объекта можно предсказать в долгосрочной перспективе.
[0127]
В способе вышеописанного варианта осуществления процесс прогнозирования извлечения второго объекта среди объектов, присутствующих во второй области R2, и прогнозирования поведения второго объекта повторяется несколько раз для извлечения. Однако способ повторения процесса прогнозирования по количеству раз извлечений включает в себя способ повторения только извлечения второго объекта по количеству раз извлечений, а затем прогнозирование поведений n извлеченных вторых объектов в дополнение к способу повторения извлечения второго объекта и прогнозирования поведения второго объекта как серии процессов.
[0128]
В вышеописанном варианте осуществления был описан способ прогнозирования поведений первого объекта, присутствующего вокруг главного транспортного средства Va. Однако способ прогнозирования поведения и аппаратура прогнозирования поведения согласно настоящему варианту осуществления могут применяться для прогнозирования поведения первого объекта, который присутствует вокруг другого транспортного средства в качестве транспортного средства, отличного от главного транспортного средства (другого транспортного средства).
[0129]
Хотя варианты осуществления изобретения были описаны, как описано выше, обсуждение и чертежи, составляющие часть этого раскрытия, не следует истолковывать как ограничение изобретения. Из этого раскрытия для специалистов в данной области техники будут очевидны различные альтернативные варианты осуществления, примеры и методы работы.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0130]
1. Устройство обнаружения объектов
2. Блок интеграции обнаружения
3. Блок отслеживания объектов
4. Устройство оценки позиции главного транспортного средства
5. Устройство получения карт
6. Устройство получения правил дорожного движения
7. Блок оценки позиции на карте
10. Блок прогнозирования поведения
11. Блок получения кандидатов курса
12. Блок получения курса
13. Блок получения окружающей среды перемещения
14. Блок извлечения объектов
15. Блок прогнозирования
20. Блок управления транспортным средством
50. Микрокомпьютер
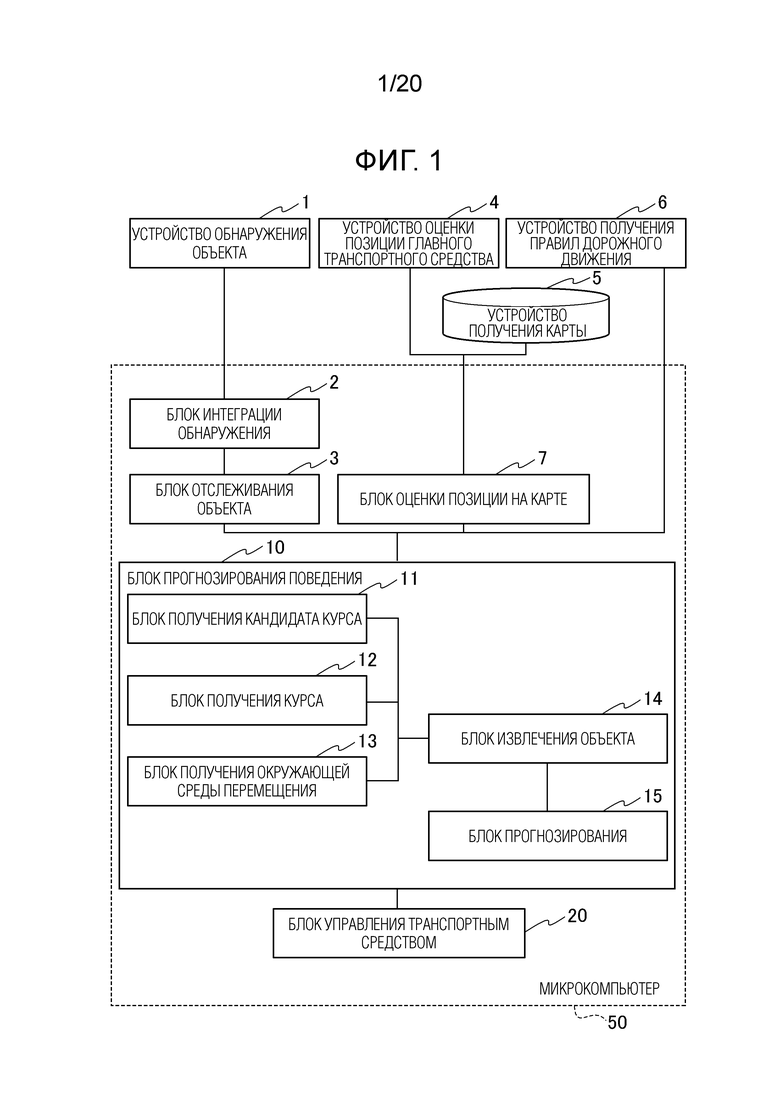
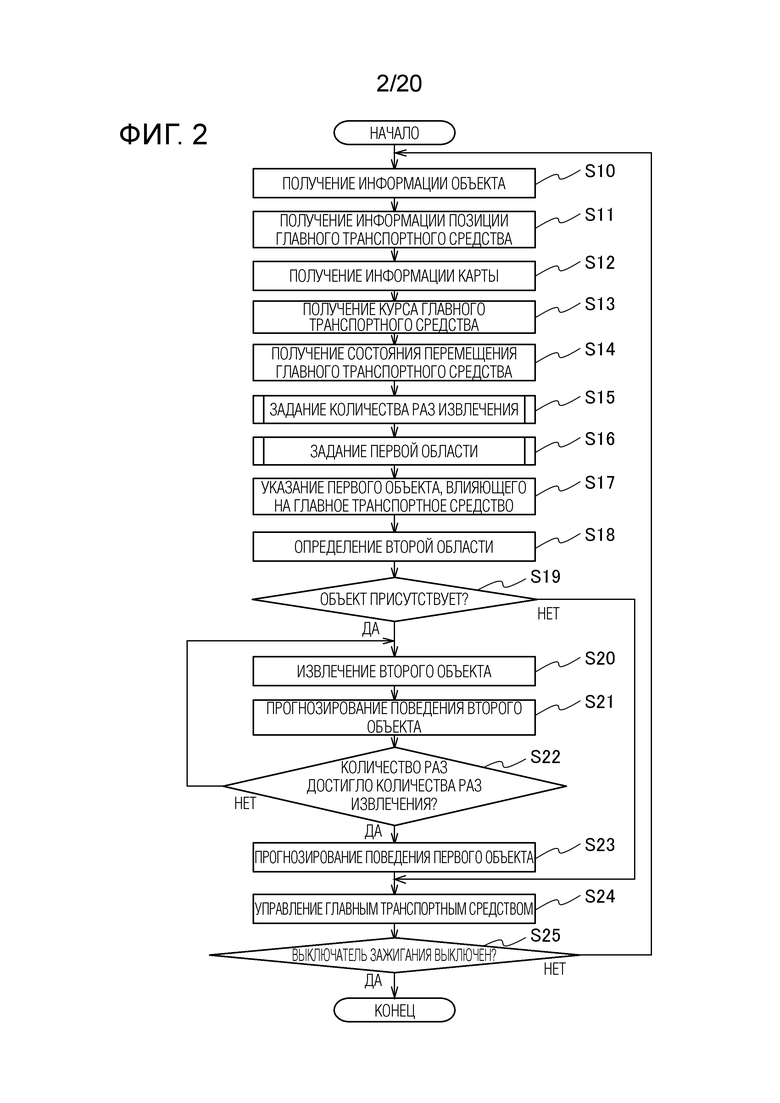
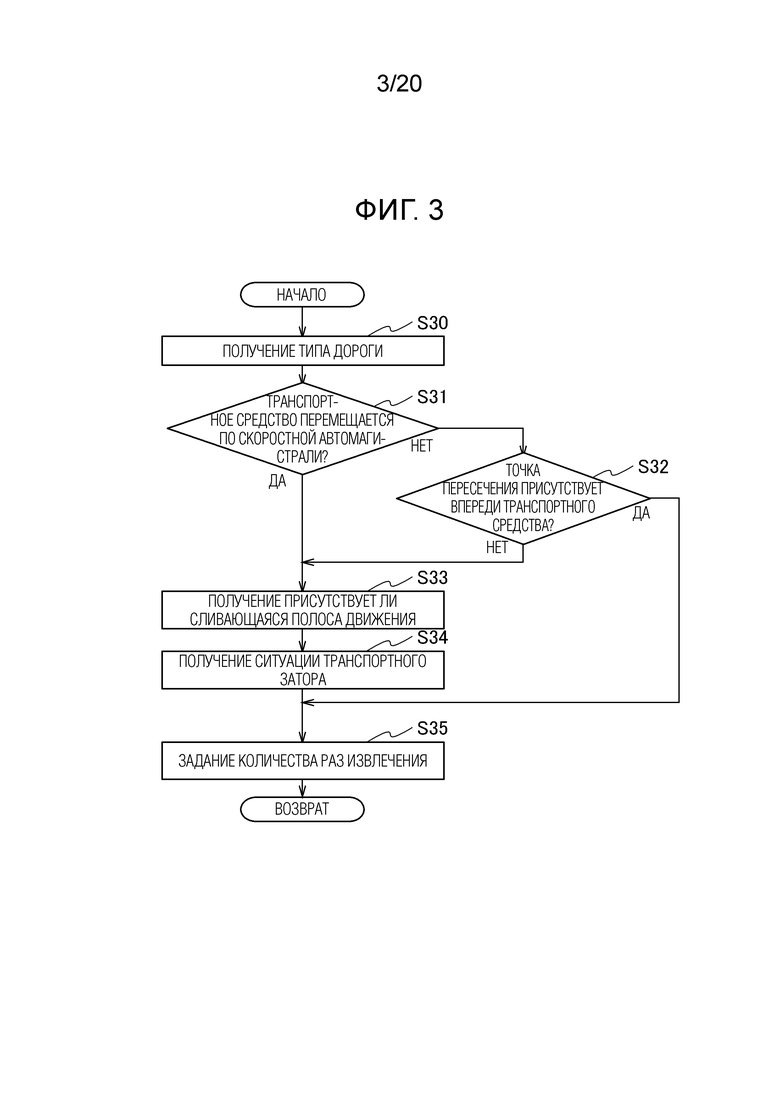
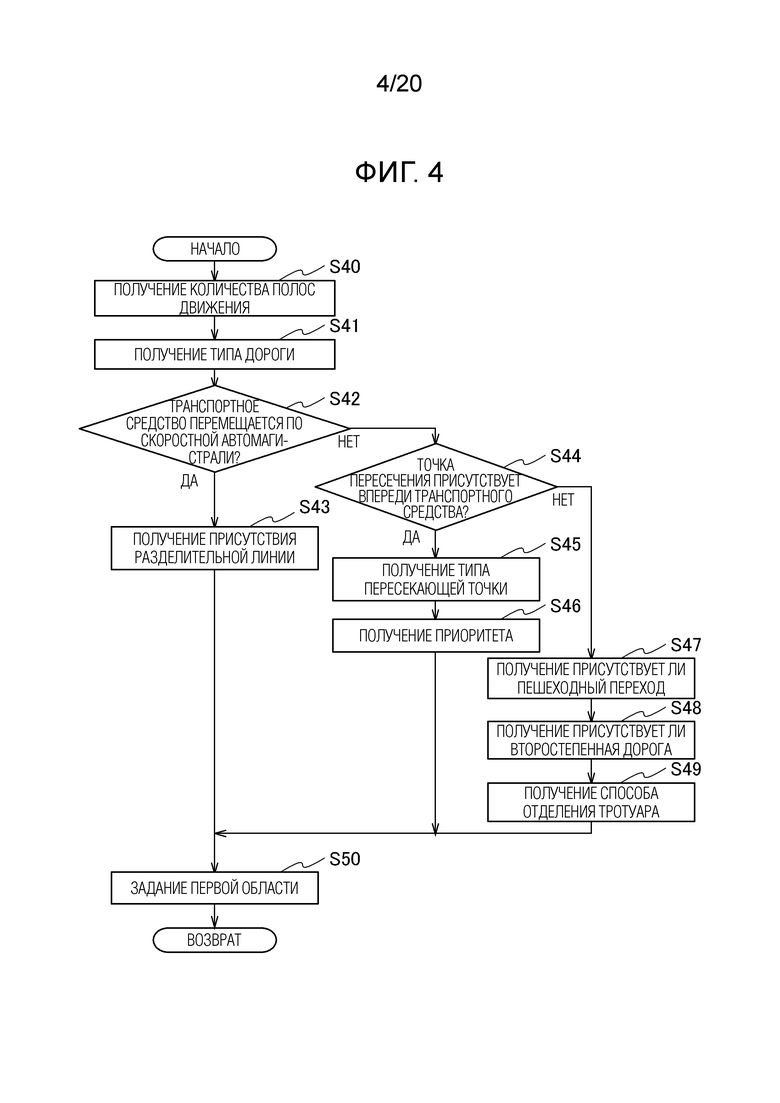
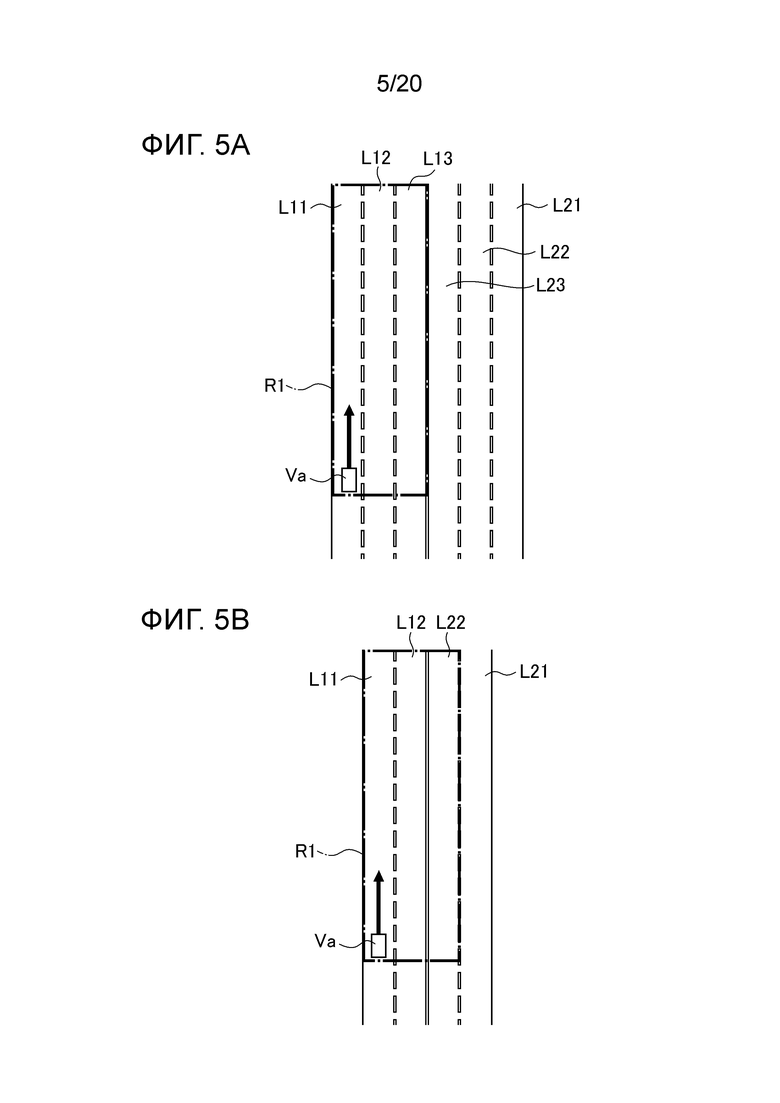
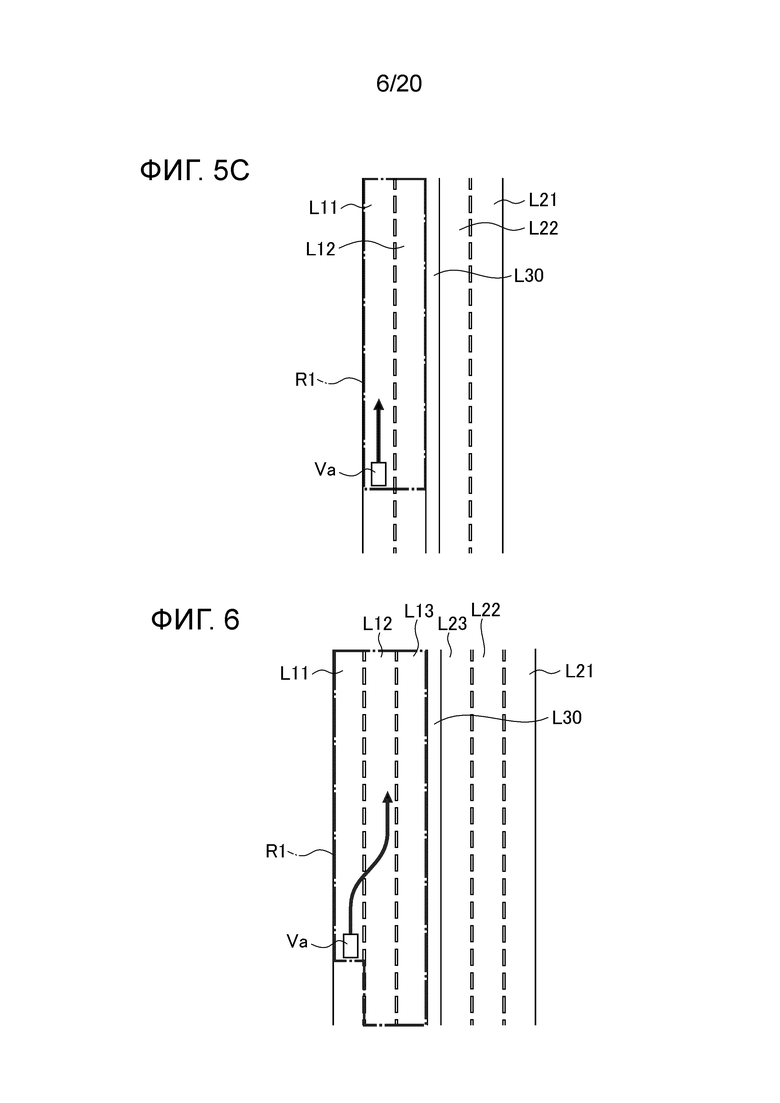
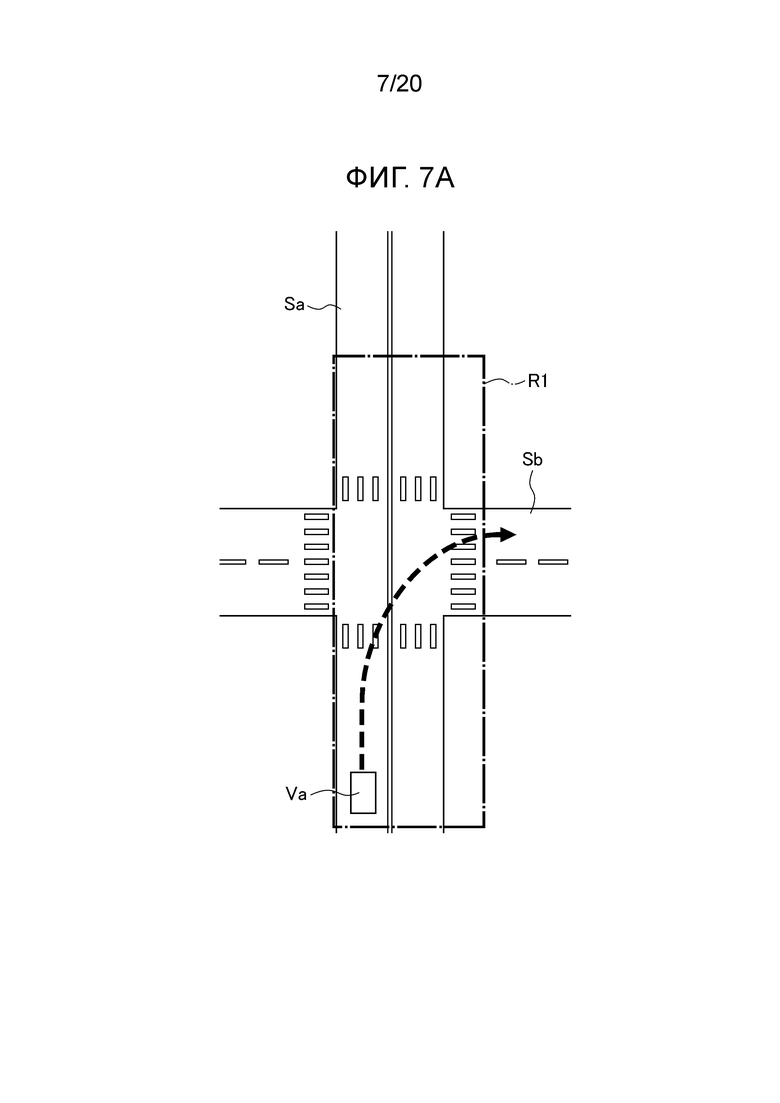
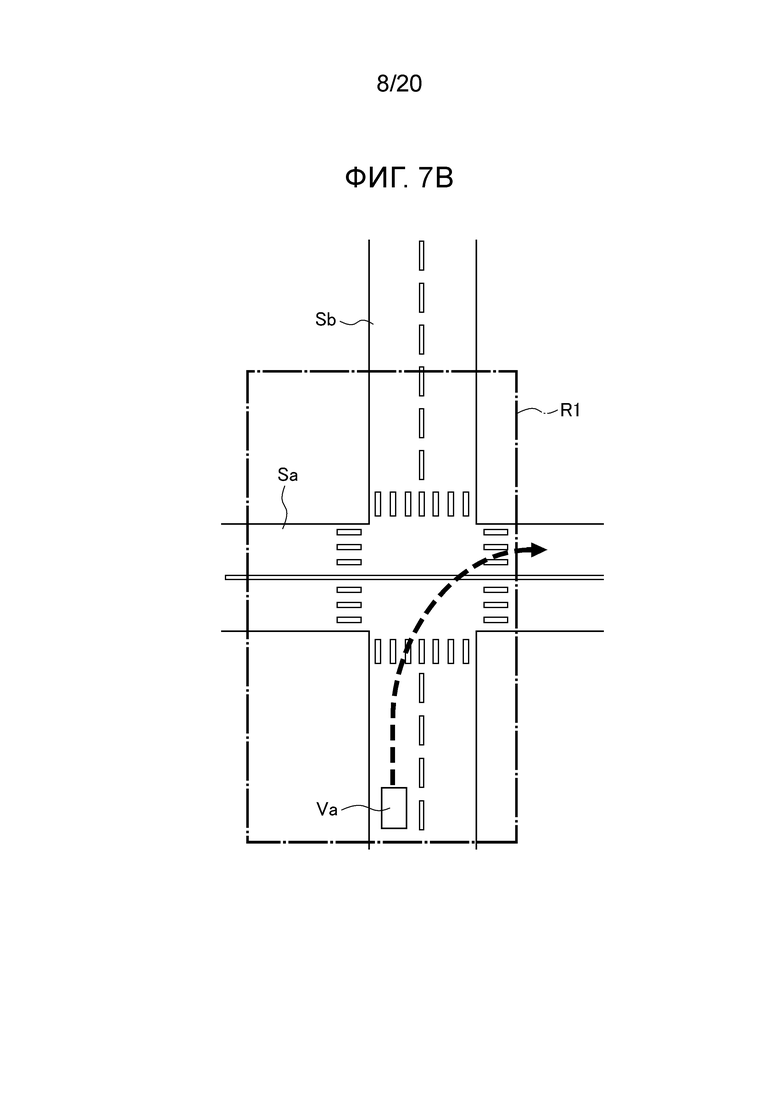
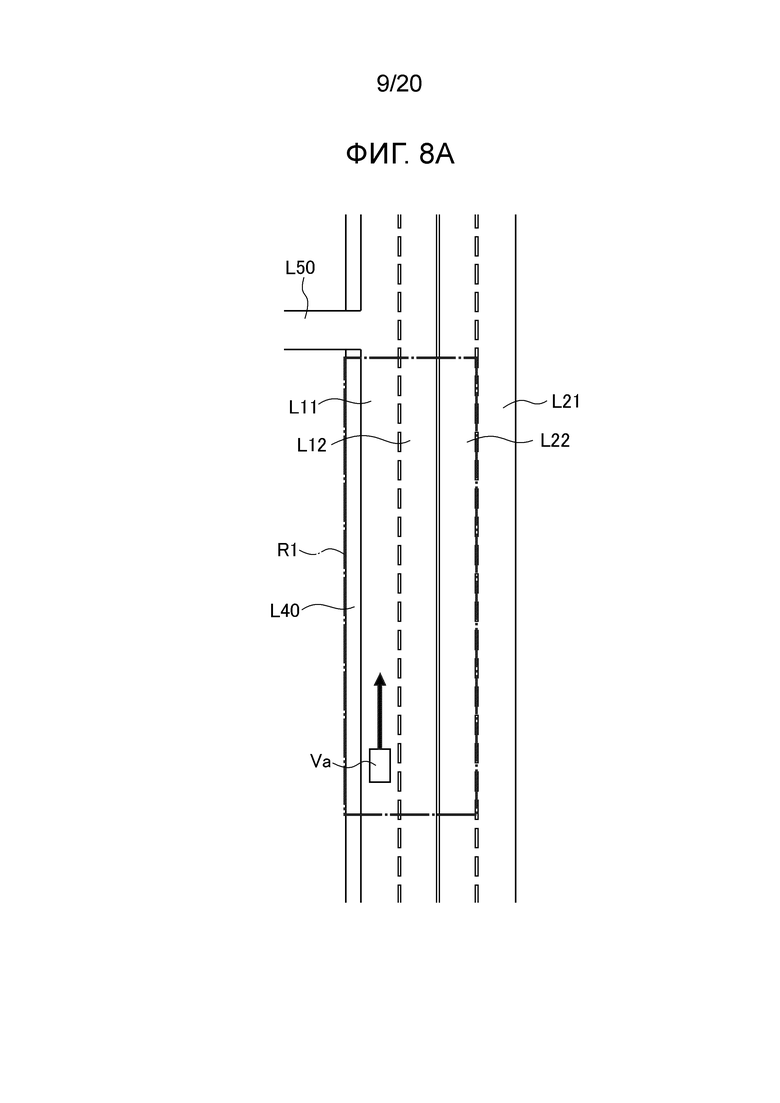
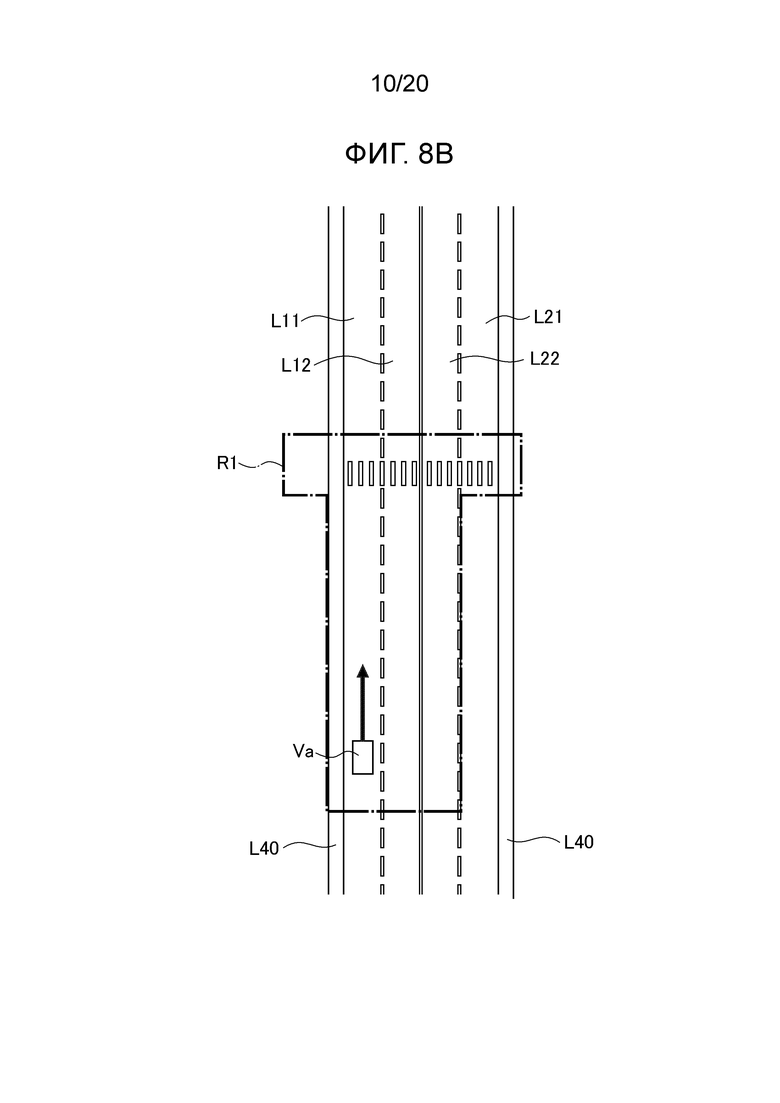
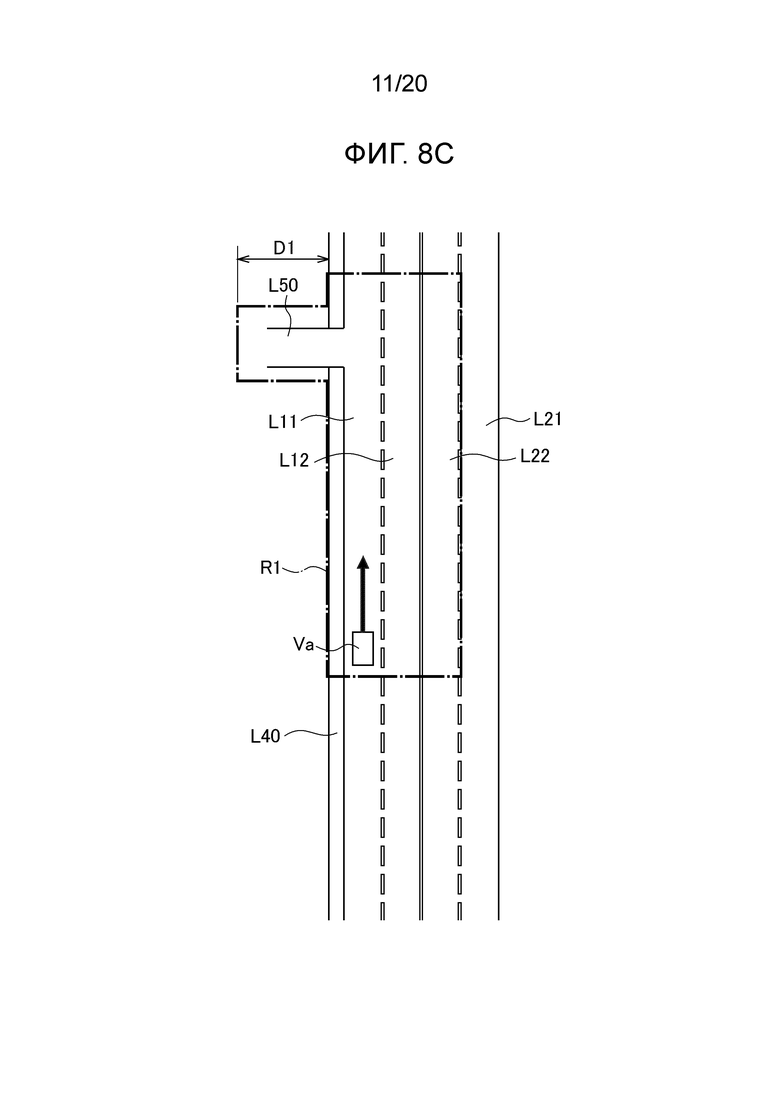
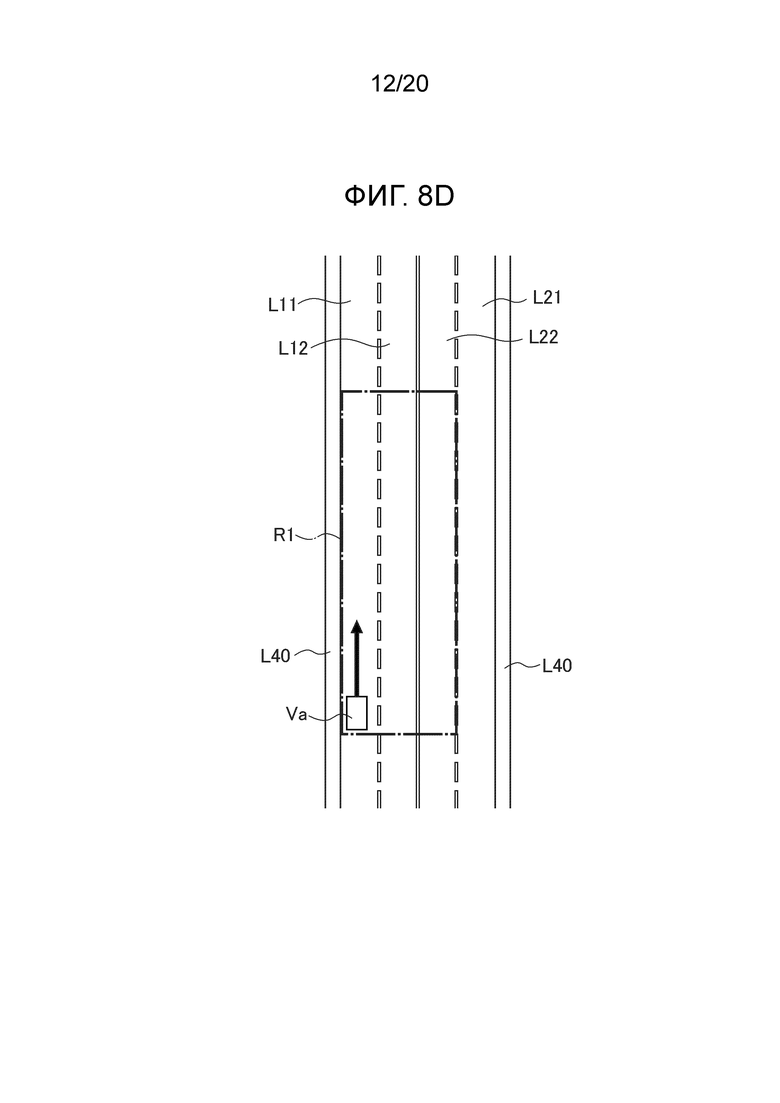
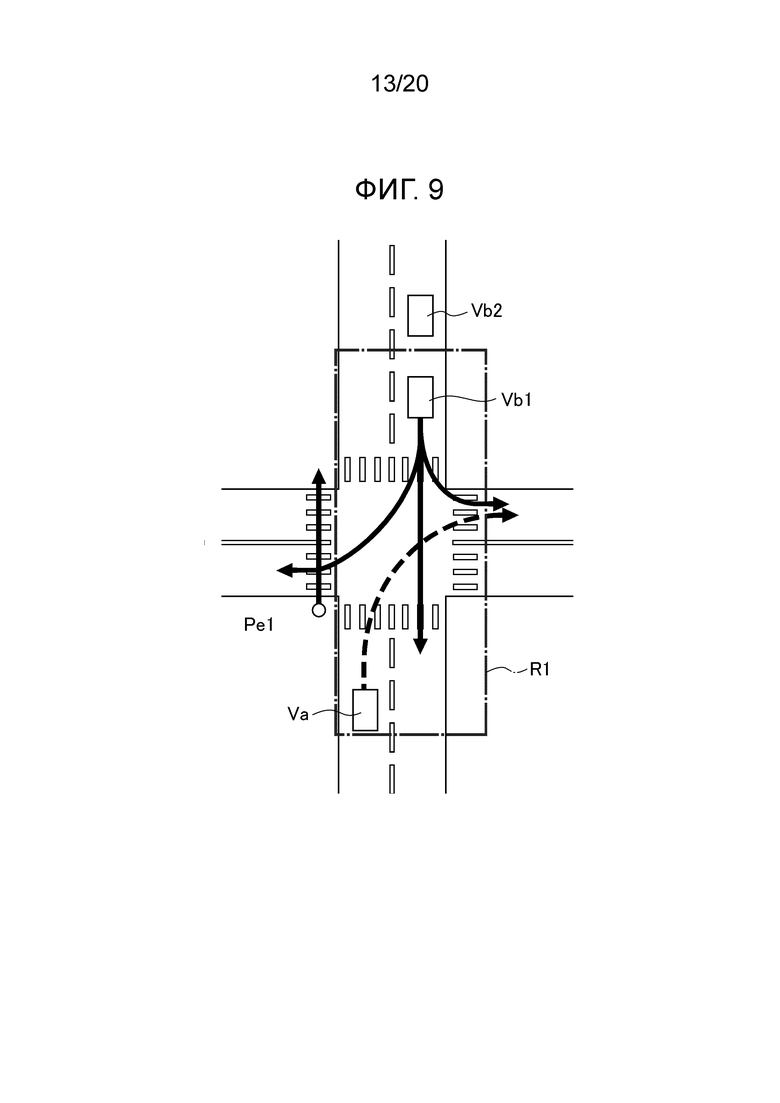
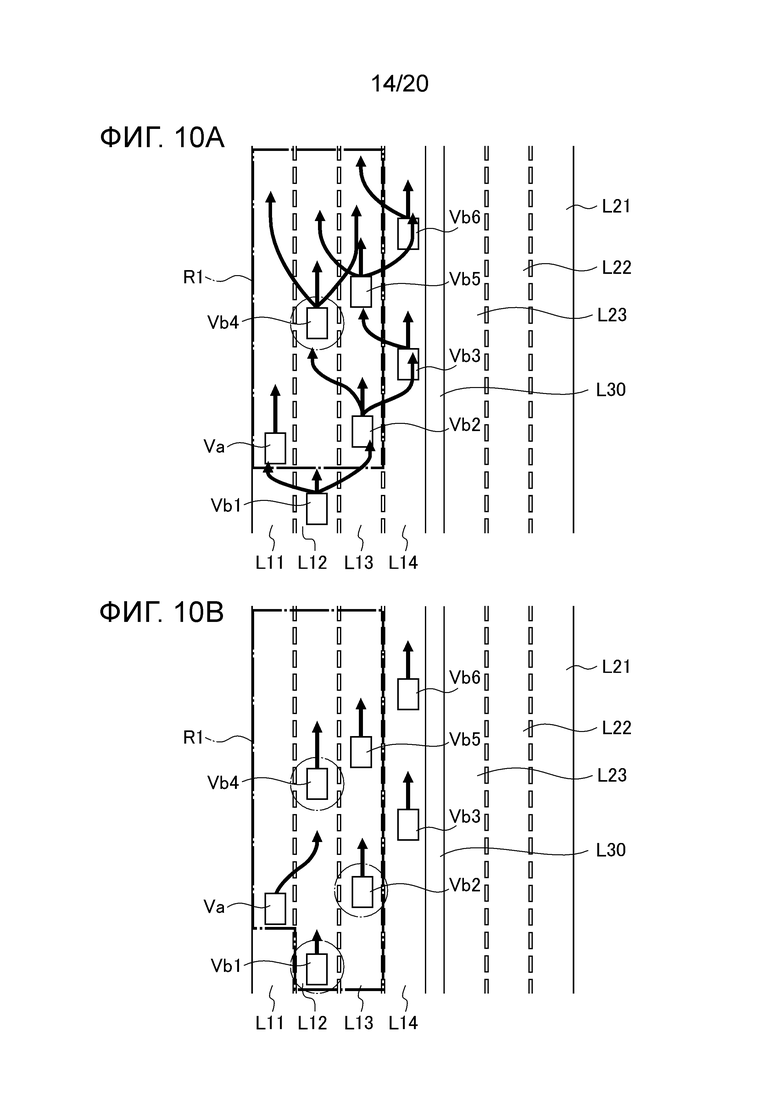
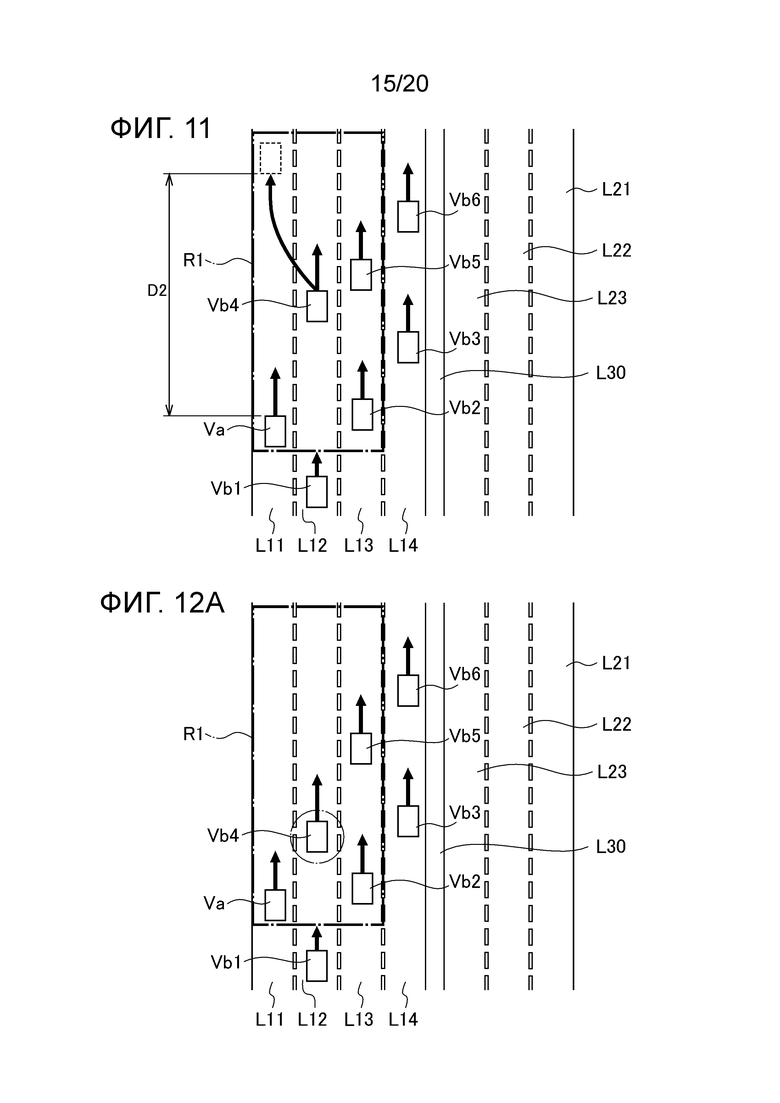
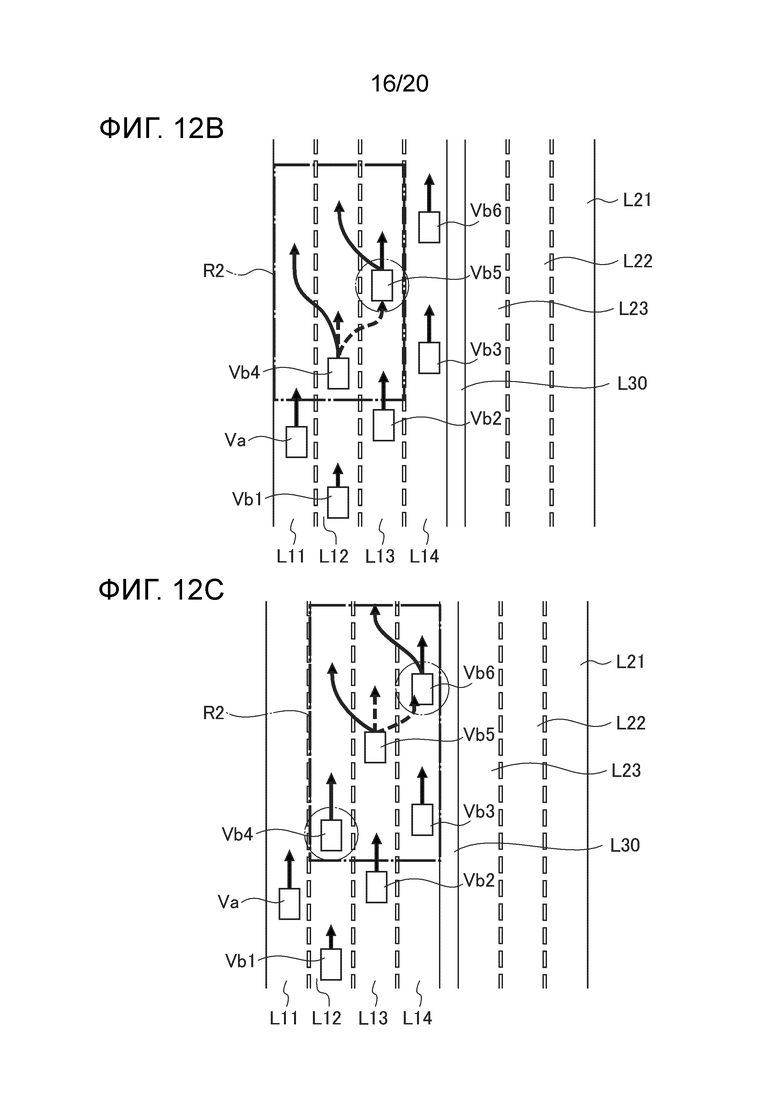
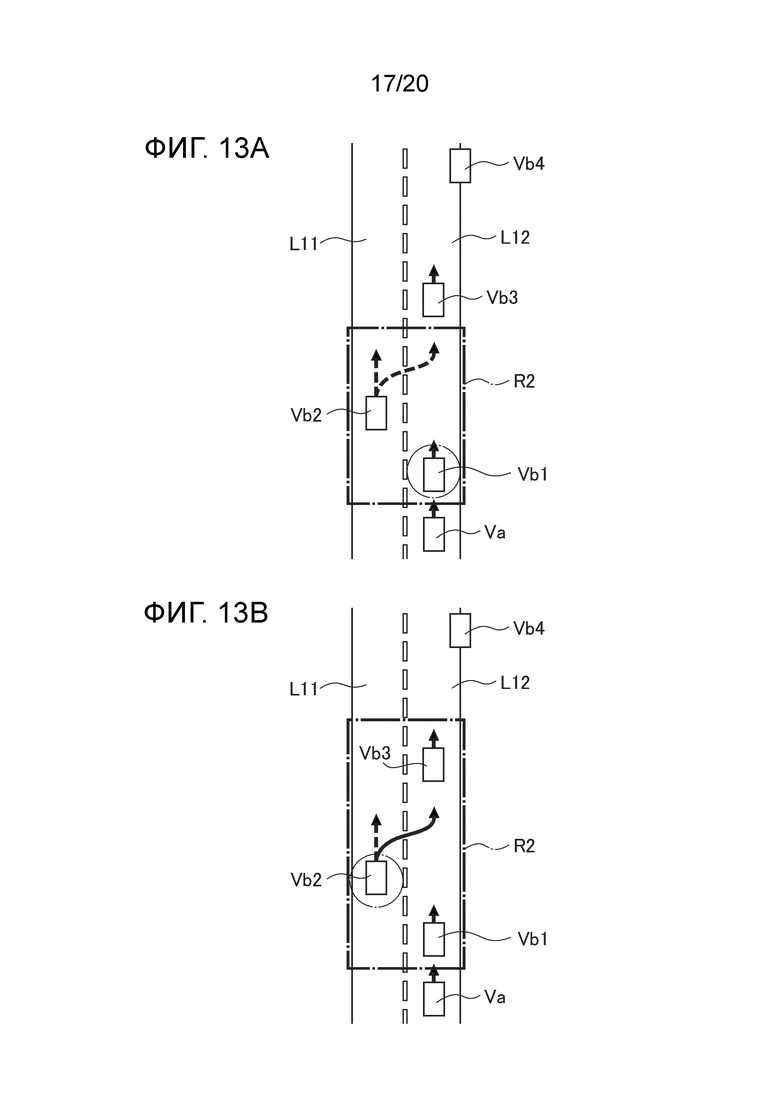
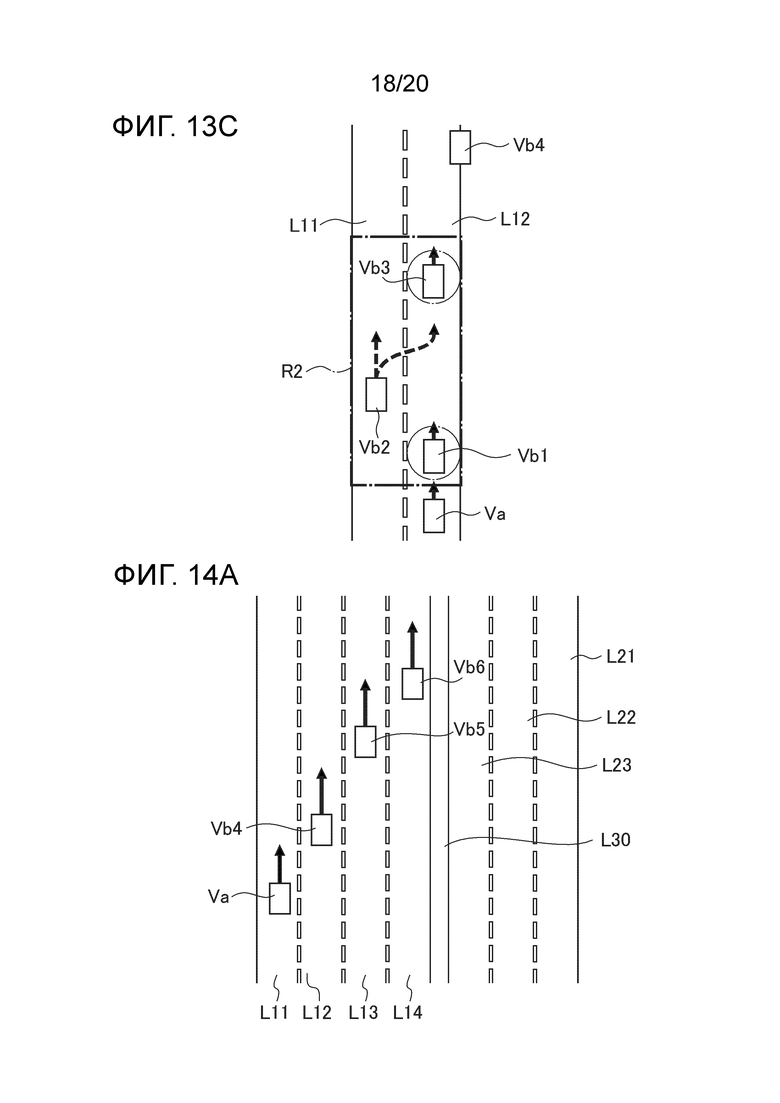
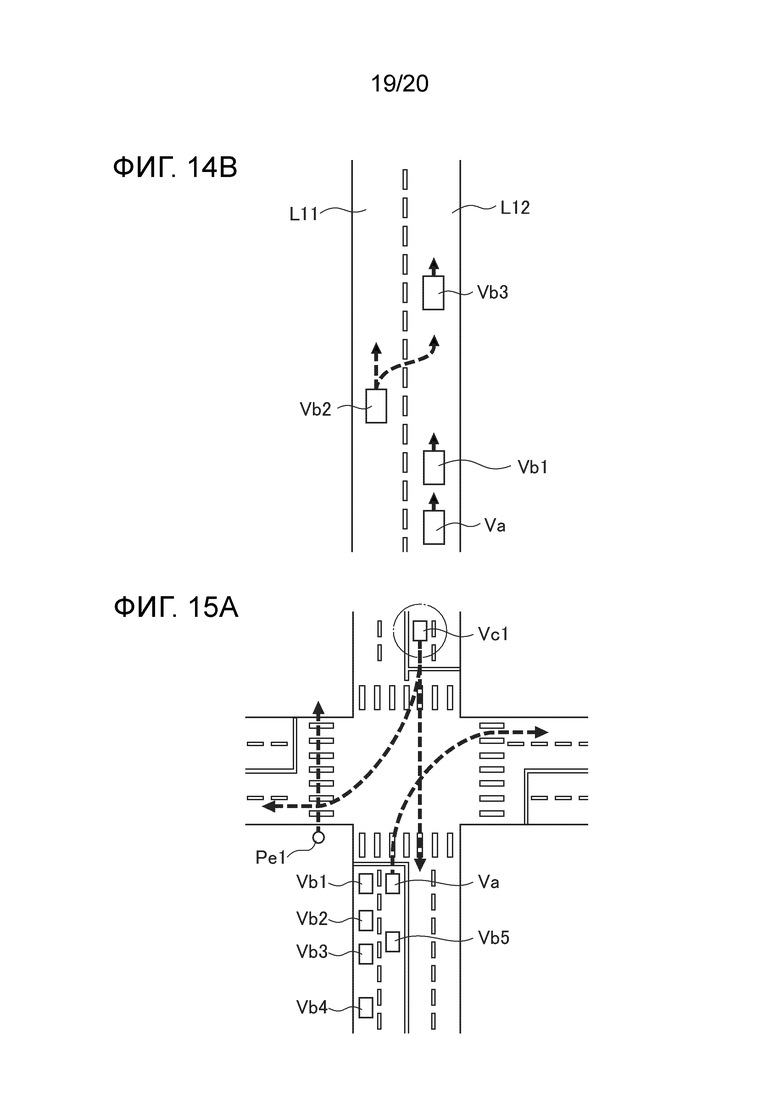
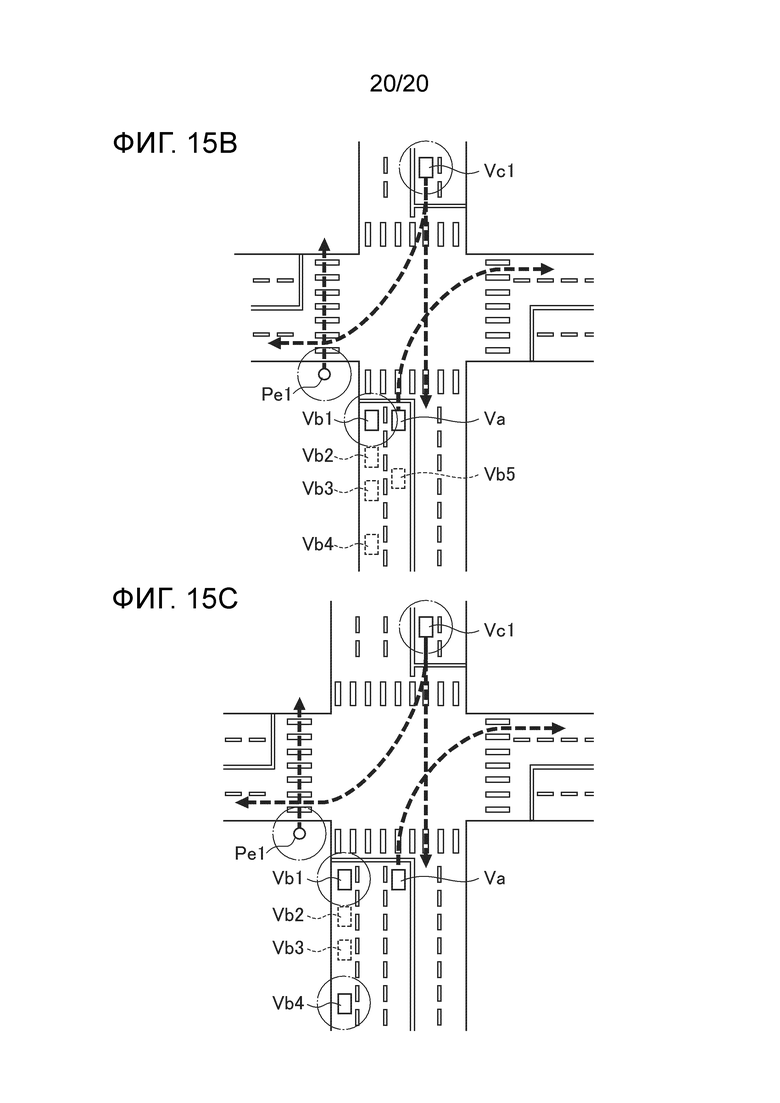
Изобретение относится к способу прогнозирования поведения. Способ прогнозирования поведения для прогнозирования поведения объекта вокруг транспортного средства содержит обнаружение объекта вокруг транспортного средства, указание первого объекта, который влияет на поведение транспортного средства, среди обнаруженных объектов, выполнение процесса прогнозирования для извлечения второго объекта, который влияет на поведение первого объекта среди множества объектов, присутствующих вокруг первого объекта и прогнозирования поведения. Способ также содержит задание извлеченного второго объекта как нового первого объекта и выполнение процесса прогнозирования для извлечения нового второго объекта, который влияет на поведение упомянутого нового первого объекта и прогнозирования поведения, повторение процесса прогнозирования с предопределенным количеством раз извлечения и прогнозирование поведения первого объекта во время первого процесса прогнозирования на основе поведений n вторых объектов, подвергнутых процессу прогнозирования. Достигается прогнозирование ситуации вокруг транспортного средства в долгосрочной перспективе. 3 н. и 13 з.п. ф-лы, 29 ил.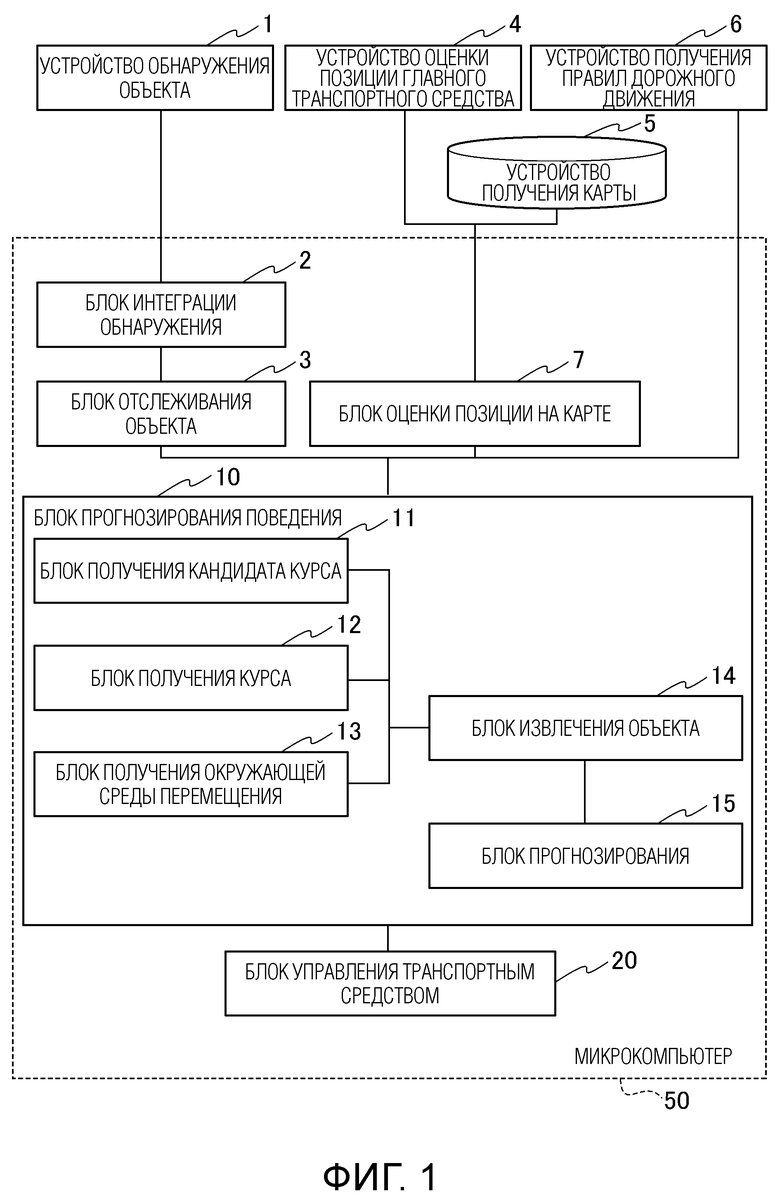
1. Способ прогнозирования поведения для прогнозирования поведения объекта вокруг транспортного средства, содержащий:
обнаружение объекта вокруг транспортного средства;
указание первого объекта, который влияет на поведение транспортного средства, среди обнаруженных объектов;
выполнение процесса прогнозирования для извлечения второго объекта, который влияет на поведение первого объекта среди множества объектов, присутствующих вокруг первого объекта, и прогнозирования поведения;
задание извлеченного второго объекта как нового первого объекта и выполнение процесса прогнозирования для извлечения нового второго объекта, который влияет на поведение упомянутого нового первого объекта и прогнозирования поведения;
повторение процесса прогнозирования с предопределенным количеством раз извлечения; и
прогнозирование поведения первого объекта во время первого процесса прогнозирования на основе поведений n (n: натуральное число, соответствующее предопределенному количеству раз) вторых объектов, подвергнутых процессу прогнозирования.
2. Способ прогнозирования поведения по п. 1, в котором
первая область задается вокруг транспортного средства на основе состояния перемещения транспортного средства или окружающей среды дороги этого транспортного средства, и
первый объект указывается из объекта в первой области.
3. Способ прогнозирования поведения по п. 2, в котором
диапазон вперед-назад для первой области задается в зависимости от скорости транспортного средства.
4. Способ прогнозирования поведения по п. 2 или 3, в котором
окружающая среда дороги транспортного средства - это окружающая среда, в которой точка пересечения находится впереди транспортного средства, и
диапазон влево-вправо первой области задается на основе приоритета в точке пересечения, заданного в правиле дорожного движения.
5. Способ прогнозирования поведения по п. 4, в котором
диапазон влево-вправо первой области шире, когда дорога транспортного средства имеет более низкий приоритет, чем пересекающая дорога, чем когда дорога транспортного средства имеет более высокий приоритет, чем пересекающаяся дорога.
6. Способ прогнозирования поведения по п. 4, в котором
диапазон влево-вправо первой области шире, когда приоритет дороги транспортного средства неясен, чем когда дорога транспортного средства имеет более высокий приоритет, чем пересекающая дорога.
7. Способ прогнозирования поведения по п. 2 или 3, в котором
окружающая среда дороги транспортного средства - прямая дорога, и
диапазон влево-вправо первой области задается на основе структуры обочины дороги упомянутой прямой дороги или того, присутствует ли пешеходный переход для пересечения прямой дороги.
8. Способ прогнозирования поведения по п. 2 или 3, в котором
диапазон влево-вправо первой области задается на основе количества полос движения дороги, по которой перемещается транспортное средство.
9. Способ прогнозирования поведения по любому из пп. 1-8, в котором
предопределенное количество раз задается на основе степени сложности из-за пересечения объекта, вызванного окружающей средой дороги транспортного средства.
10. Способ прогнозирования поведения по п. 9, в котором
предопределенное количество раз меньше, когда транспортное средство перемещается по скоростной автомагистрали, чем когда транспортное средство перемещается по обычной дороге.
11. Способ прогнозирования поведения по п. 9, в котором
предопределенное количество раз больше, когда транспортное средство перемещается в точке пересечения, чем когда транспортное средство перемещается по прямой дороге.
12. Способ прогнозирования поведения по п. 9, в котором
предопределенное количество раз меньше, когда транспортное средство перемещается на участке без слияния, чем когда транспортное средство перемещается на участке слияния.
13. Способ прогнозирования поведения по любому из пп. 9-12, в котором
предопределенное количество раз меньше, когда транспортный затор не возникает, чем когда транспортный затор возникает.
14. Способ прогнозирования поведения по любому из пп. 1-13, в котором
вторая область для извлечения второго объекта задается вокруг первого объекта, и
объект с относительно низким влиянием на поведения первого объекта среди объектов, присутствующих во второй области, исключается из извлечения как второй объект.
15. Аппаратура прогнозирования поведения для прогнозирования поведения объекта вокруг транспортного средства, содержащая:
датчик для обнаружения объекта вокруг транспортного средства; и
блок управления для прогнозирования поведения объекта вокруг транспортного средства, при этом
блок управления:
указывает первый объект, который влияет на поведение транспортного средства, среди обнаруженных объектов,
выполняет процесс прогнозирования для извлечения второго объекта, который влияет на поведение первого объекта, среди множества объектов, присутствующих вокруг первого объекта, и прогнозирования поведения,
задает извлеченный второй объект в качестве нового первого объекта и выполняет процесс прогнозирования для извлечения нового второго объекта, который влияет на поведение нового первого объекта, и прогнозирования поведения,
повторяет процесс прогнозирования предопределенное количество раз и
прогнозирует поведение первого объекта в первом процессе прогнозирования на основе поведения n (n: натуральное число, соответствующее предопределенному количеству раз) вторых объектов, подвергнутых процессу прогнозирования.
16. Аппаратура управления транспортным средством, содержащая:
датчик для обнаружения объекта вокруг транспортного средства; и
блок управления для прогнозирования поведения обнаруженного объекта и управления транспортным средством на основе поведения объекта, при этом
блок управления:
указывает первый объект, который влияет на поведение транспортного средства, среди обнаруженных объектов,
выполняет процесс прогнозирования для извлечения второго объекта, который влияет на поведение первого объекта, среди множества объектов, присутствующих вокруг первого объекта, и прогнозирования поведения,
задает извлеченный второй объект в качестве нового первого объекта и выполняет процесс прогнозирования для извлечения нового второго объекта, который влияет на поведение нового первого объекта, и прогнозирования поведения,
повторяет процесс прогнозирования предопределенное количество раз,
прогнозирует поведение первого объекта в первом процессе прогнозирования на основе поведения n (n: натуральное число, соответствующее предопределенному количеству раз) вторых объектов, подвергнутых процессу прогнозирования, и
управляет главным транспортным средством на основе прогнозируемого поведения первого объекта.
| US 9550496 B2, 24.01.2017 | |||
| JP 4905034 B2, 28.03.2018 | |||
| JP 4600174 B2, 15.12.2010 | |||
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ ДВИЖЕНИЯ В МЕГАПОЛИСЕ ПУТЕМ МНОГОФАКТОРНОГО МОДЕЛИРОВАНИЯ ПЕРЕМЕЩАЕМОГО ТРАНСПОРТНОГО ПОТОКА | 2013 |
|
RU2528501C1 |

