Область техники
[0001] Настоящее изобретение относится к способам прогнозирования поведения транспортного средства и устройствам прогнозирования поведения транспортного средства.
Уровень техники
[0002] Известны общепринятые способы определения, в зависимости от условий движения, порядка приоритетов транспортных средств, когда они проезжают по узкой дороге, по которой транспортным средствам трудно проезжать мимо друг друга (см. Патентный Документ 1). В изобретении, раскрытом в Патентном Документе 1, основное транспортное средство и соответствующее транспортное средство обмениваются информацией о времени, которое требуется, чтобы добраться до места прохождения, и количестве следующих за ними транспортных средств, и порядок приоритетов определяется на основе обмениваемой информации.
Патентный документ
[0003] Патентный Документ 1: публикация заявки на патент Японии № 2016-143137.
Техническая проблема
[0004] К сожалению, изобретение, раскрытое в Патентном Документе 1, основано на предположении того, что основное транспортное средство и соответствующее транспортное средство имеют функцию обмена информацией. Следовательно, в случае, когда основное транспортное средство и соответствующее транспортное средство не могут обмениваться информацией, трудно определить порядок приоритетов, и, таким образом, эти транспортные средства могут не предпринять действия по уклонению движения на узкой дороге быстрым способом.
[0005] Настоящее изобретение было выполнено в свете вышеупомянутой проблемы, и его целью является создание способа прогнозирования поведения транспортного средства и устройства прогнозирования поведения транспортного средства, которые позволяют основному транспортному средству и соответствующему транспортному средству своевременно предпринимать действия по уклонению, даже если эти транспортные средства не могут обмениваться информацией.
Решение проблемы
[0006] Способ прогнозирования поведения транспортного средства согласно аспекту настоящего изобретения включает: определение приоритета основного транспортного средства и соответствующего транспортного средства, когда основное транспортное средство и соответствующее транспортное средство проходят по участку дороги; и установку периода времени от момента остановки соответствующего транспортного средства до момента начала действия основного транспортного средства по уклонению от соответствующего транспортного средства, чтобы он был короче в случае, когда приоритет основного транспортного средства является низким, чем в случае, когда приоритет основного транспортного средства является высоким.
Преимущественные эффекты изобретения
[0007] Настоящее изобретение позволяет оперативно предпринимать действие по уклонению, даже если основное транспортное средство и соответствующее транспортное средство не могут обмениваться информацией.
Краткое описание чертежей
[0008] Фиг. 1 - схематическая диаграмма конфигурации устройства прогнозирования поведения транспортного средства в соответствии с вариантом осуществления настоящего изобретения;
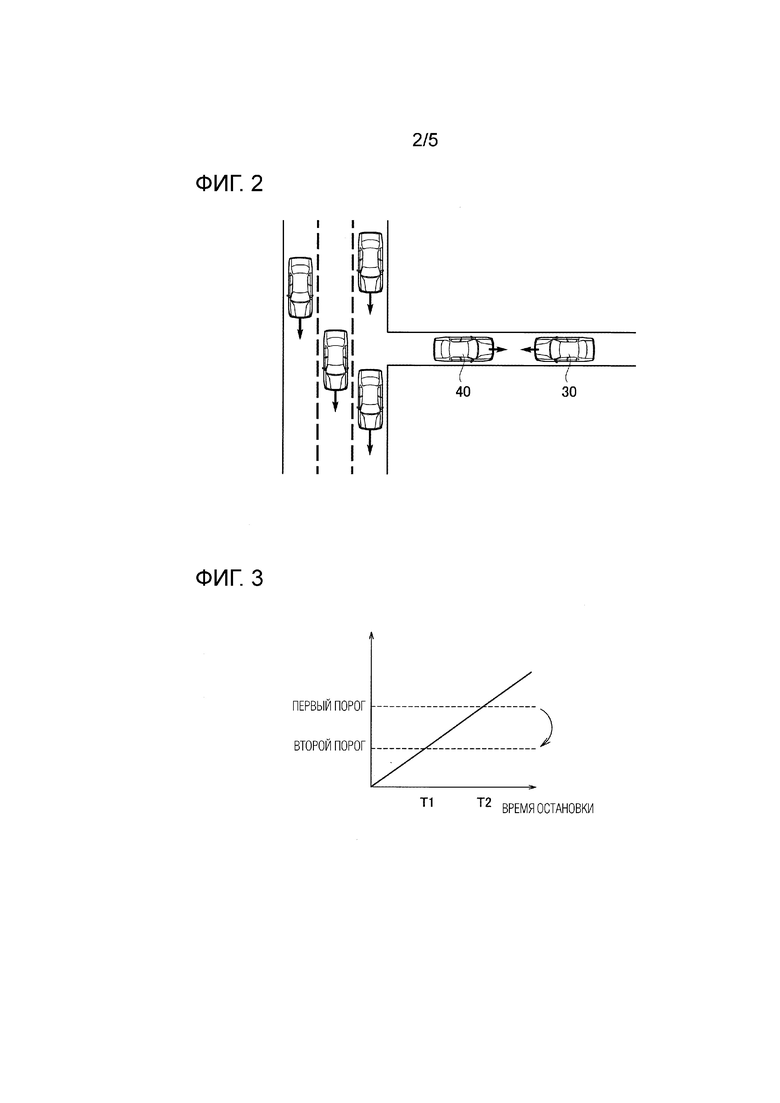
Фиг. 2 - схема, поясняющая основное транспортное средство и соответствующее транспортное средство, движущиеся навстречу друг другу на узкой дороге;
Фиг. 3 - график, иллюстрирующий взаимосвязь между временем остановки соответствующего транспортного средства и пороговым значением;
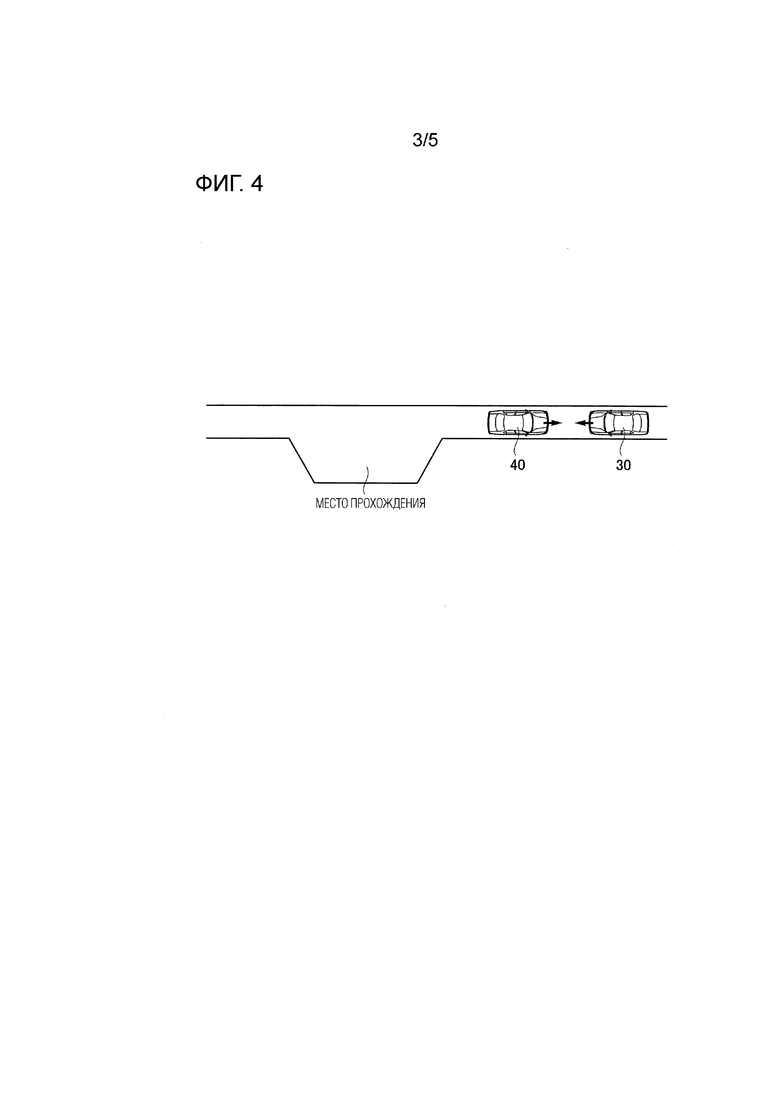
Фиг. 4 - схема, поясняющая основное транспортное средство и соответствующее транспортное средство, движущиеся навстречу друг другу на узкой дороге;
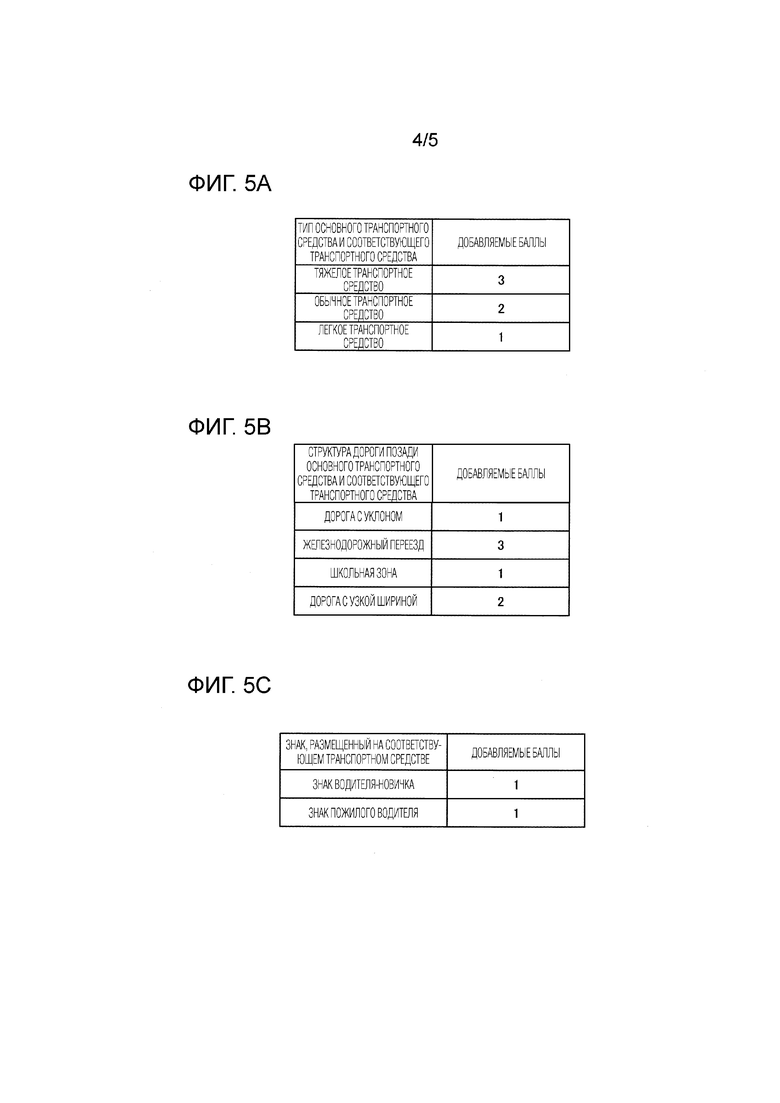
Фиг. 5A - таблица, иллюстрирующая взаимосвязь между типом транспортного средства и точкой, которую необходимо добавить;
Фиг. 5B - таблица, иллюстрирующая взаимосвязь между структурой дороги и точкой, которую необходимо добавить;
Фиг. 5C - таблица, иллюстрирующая взаимосвязь между знаком и точкой, которую необходимо добавить; и
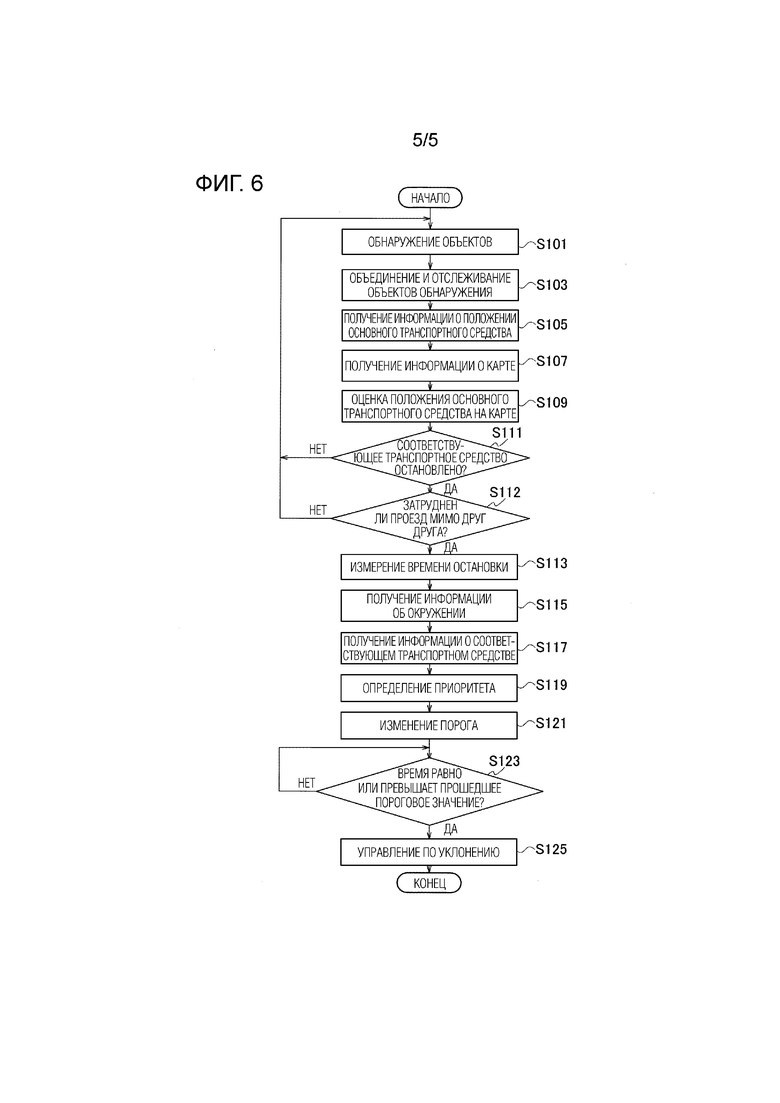
Фиг.6 - блок-схема, поясняющая пример работы устройства прогнозирования поведения транспортного средства согласно варианту осуществления настоящего изобретения.
Описание вариантов осуществления изобретения
[0009] Далее будет описан вариант осуществления настоящего изобретения со ссылкой на чертежи. На иллюстрации чертежей одинаковые компоненты обозначены одинаковыми ссылочными позициями, и их повторное описание будет опущено.
[0010] Конфигурация устройства прогнозирования поведения транспортного средства
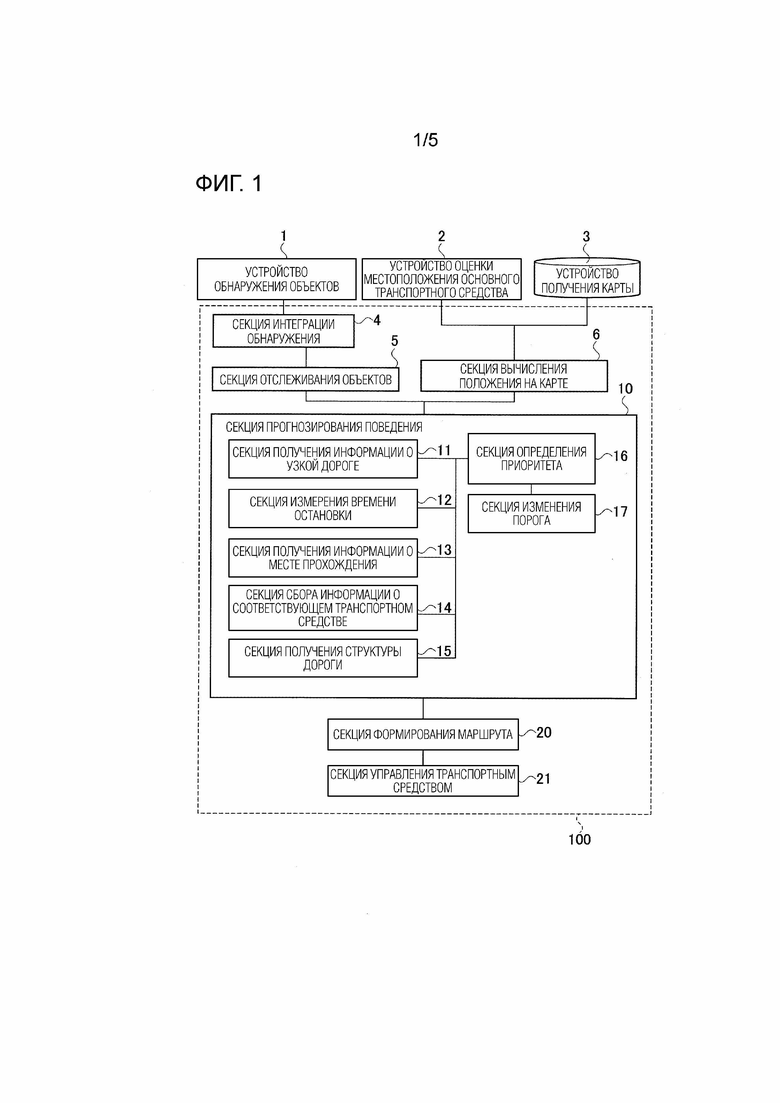
Конфигурация устройства прогнозирования поведения транспортного средства согласно настоящему варианту осуществления будет описана со ссылкой на фиг. 1. Устройство прогнозирования поведения транспортного средства включает в себя устройство 1 обнаружения объектов, устройство 2 оценки местоположения основного транспортного средства, устройство 3 получения карты и контроллер 100. Устройство прогнозирования поведения транспортного средства в основном используется для автоматического вождения транспортного средства, имеющего функцию автоматического вождения, но использование устройства прогнозирования поведения транспортного средства не ограничивается этим видом транспортного средства. Устройство прогнозирования поведения транспортного средства может использоваться для транспортного средства без функции автоматического вождения.
[0011] Устройство 1 обнаружения объектов включает в себя множество датчиков обнаружения объектов различных типов, установленных на основном транспортном средстве для обнаружения объектов вокруг основного транспортного средства, таких как лазерные радары, радары миллиметрового диапазона и камеры. Устройство 1 обнаружения объектов обнаруживает объекты вокруг основного транспортного средства с помощью множества датчиков обнаружения объектов. Устройство 1 обнаружения объектов обнаруживает движущиеся объекты, включая другие соответствующие транспортные средства, мотоциклы, велосипеды, а также пешеходы и стационарные объекты, включая припаркованные транспортные средства. Устройство 1 обнаружения объектов обнаруживает, например, положения, ориентации (углы рыскания), размеры, скорости, ускорения, рывки, замедления и скорости рыскания движущихся объектов и неподвижных объектов относительно основного транспортного средства.
[0012] Устройство 2 оценки положения основного транспортного средства включает в себя датчик определения положения, установленный на основном транспортном средстве для измерения абсолютного положения основного транспортного средства, такой как система глобального позиционирования (GPS) или одометрия. Устройство 2 оценки местоположения основного транспортного средства измеряет, используя датчик определения положения, абсолютное положение основного транспортного средства, в частности, положение, ориентацию и скорость основного транспортного средства относительно установленной контрольной точки.
[0013] Устройство 3 получения карты получает картографическую информацию, указывающую структуры дороги, по которой движется основное транспортное средство. Информация о карте, которую получает устройство 3 получения карты, включает в себя информацию о структуре дороги, такую как абсолютные положения полос движения и отношения между полосами движения и отношения относительного положения между полосами движения. Устройство 3 получения карты может иметь базу данных карты, хранящую информацию карты, или может получать информацию карты с внешнего сервера данных карты с помощью облачных вычислений. Устройство 3 получения карты может использовать связь между транспортными средствами или связь между дорожными транспортными средствами для получения информации о карте.
[0014] Контроллер 100 управляет работой основного транспортного средства на основе результата обнаружения устройства 1 обнаружения объектов и устройства 2 оценки местоположения основного транспортного средства и информации, полученной устройством 3 получения карты. Контроллер 100 является микрокомпьютером общего назначения, включающим в себя центральный процессор (CPU), память и блок ввода-вывода. Микрокомпьютер имеет компьютерную программу, установленную для обеспечения функционирования микрокомпьютера в качестве устройства прогнозирования окружающей обстановки. Микрокомпьютер, выполняя компьютерную программу, функционирует как множество схем обработки информации, включенных в устройство прогнозирования поведения транспортного средства. Следует отметить, что хотя в показанном здесь примере множество схем обработки информации, включенных в устройство прогнозирования поведения транспортного средства, реализованы с использованием программного обеспечения, схемы обработки информации могут быть сконфигурированы, как само собой разумеющееся, с использованием выделенного аппаратного обеспечения для выполнения информационных процессов, как будет описано далее. Множество схем обработки информации могут быть сконфигурированы с использованием отдельных частей оборудования.
[0015] Контроллер 100 включает в себя секцию 4 интеграции обнаружения, секцию 5 отслеживания объектов, секцию 6 вычисления положения на карте, секцию 10 прогнозирования поведения, секцию 20 формирования маршрута и секцию 21 управления транспортным средством в качестве множества схем обработки информации. Секция 10 прогнозирования поведения включает в себя секцию 11 получения информации о узкой дороге, секцию 12 измерения времени остановки, секцию 13 получения информации о месте прохождения, секцию 14 сбора информации о соответствующем транспортном средстве, секцию 15 получения структуры дороги, секцию 16 определения приоритета и секцию 17 изменения порога.
[0016] Секция 4 интеграции обнаружения объединяет множество частей результата обнаружения, полученных от множества датчиков обнаружения объектов, включенных в устройство 1 обнаружения объектов, для вывода одной части результата обнаружения для каждого объекта. В частности, секция 4 интеграции обнаружения вычисляет наиболее разумное поведение каждого объекта, имеющего наименьшую ошибку, из поведения объекта, полученного от каждого из датчиков обнаружения объектов, с учетом характеристик ошибок или тому подобного для каждого датчика обнаружения объектов. В частности, используя известную методику объединения датчиков, секция 4 интеграции обнаружения всесторонне оценивает результат обнаружения, полученный датчиками нескольких типов, для получения более точного результата обнаружения.
[0017] Секция 5 отслеживания объектов отслеживает объекты, обнаруженные секцией 4 интеграции обнаружения. В частности, секция 5 отслеживания объектов проверяет поведение объекта, выведенного в разное время, чтобы определить, являются ли объекты, обнаруженные в разное время, одинаковыми (устанавливает ассоциации) и отслеживает объект на основе результатов ассоциации. Следует отметить, что поведение объекта, выведенное в разное время, сохраняется в памяти внутри контроллера 100.
[0018] Секция 6 вычисления положения на карте оценивает, исходя из абсолютного положения основного транспортного средства, полученного с помощью устройства 2 оценки местоположения основного транспортного средства, и картографических данных, полученных с помощью устройства 3 получения карты, положение и ориентацию основного транспортного средства на карта.
[0019] Секция 11 получения информации о узкой дороге получает информацию об узких дорогах от устройства 3 получения карты. Узкая дорога относится к участку дороги, по которому транспортному средству и встречному транспортному средству трудно проехать мимо друг друга. Следует отметить, что даже участок дороги, который позволяет транспортному средству и встречному транспортному средству проезжать мимо друг друга, может быть узкой дорогой в зависимости от состояния. Например, предположим, что есть участок дороги, на котором транспортное средство и встречное транспортное средство могут проезжать мимо друг друга, если оба транспортных средства являются легкими транспортными средствами, ширина которых мала. На этом участке дороги в случае, когда одно из транспортных средств, движущихся навстречу друг другу, представляет собой грузовик с большой шириной транспортного средства, даже если другое транспортное средство представляет собой легкое транспортное средство, ширина транспортного средства которого мала, для этих транспортных средств может быть затруднено проехать мимо друг друга. Следовательно, такой участок дороги может быть узкой дорогой. Здесь предположим, что имеется участок дороги, который позволяет транспортному средству и встречному транспортному средству проезжать мимо друг друга, если оба транспортных средства движутся вблизи соответствующих обочин. На этом участке дороги, когда один или оба из водителей транспортных средств, движущихся навстречу друг другу, являются начинающими, для этих транспортных средств может быть затруднительно проезжать мимо друг друга, потому что вождение для проезда около обочины может быть сложным. Следовательно, такой участок дороги может быть узкой дорогой.
[0020] Секция 12 измерения времени остановки измеряет время с момента остановки соответствующего транспортного средства на основе информации, полученной из секции 5 отслеживания объекта.
[0021] Секция 13 получения места прохождения получает информацию о местах прохождения от устройства 3 получения карты. Проходное место представляет собой пространство, предназначенное для узкой дороги, главным образом для предоставления права проезда, когда транспортные средства движутся навстречу друг другу. Секция 13 получения места прохождения может получать объем трафика в местах прохождения. Секция 13 получения места прохождения может определять расстояние от текущего местоположения основного транспортного средства или соответствующего транспортного средства до места прохождения.
[0022] Секция 14 получения информации о соответствующем транспортном средстве получает информацию об соответствующем транспортном средстве (его атрибутах) от устройства 1 обнаружения объектов. Атрибуты соответствующего транспортного средства представляют собой, например, тип транспортного средства соответствующего транспортного средства и знак, размещенный на соответствующем транспортном средстве.
[0023] Секция 15 получения структуры дороги получает дорожные структуры вокруг основного транспортного средства и соответствующего транспортного средства от устройства 3 получения карты. Примеры дорожных сооружений включают в себя наклоны дороги, железнодорожные переезды, школьные зоны, ширину дороги и перекрестки.
[0024] Секция 16 определения приоритета (схема определения приоритета) определяет приоритет транспортного средства, когда транспортное средство движется через участок дороги, по которому транспортным средствам трудно проезжать друг с другом, на основе информации, полученной из секции 11 получения информации о узкой дороге, секции 12 измерения времени остановки, секции 13 получения места прохождения, секции 14 сбора информации о соответствующем транспортном средстве и секции 15 получения структуры дороги. В настоящем варианте осуществления приоритет является объективным индикатором, и низкий приоритет не обязательно означает, что транспортное средство сначала предпринимает действия по уклонению из-за его низкого приоритета. Высокий приоритет не обязательно означает, что транспортное средство не избегает каких-либо действия ввиду его более высокого приоритета. Транспортное средство может сначала предпринять действия по уклонению, даже если оно имеет высокий приоритет. Следует отметить, что действие избегания означает операцию вождения для предоставления права проезда другому транспортному средству, примеры которого включают в себя на узкой дороге движение назад или движение к обочине. Приоритет также является индикатором, используемым для изменения порога, описанного ниже.
[0025] Секция 17 изменения порога изменяет порог на основе приоритета, полученного из секции 16 определения приоритета. Порог в настоящем варианте осуществления является индикатором, используемым для начала действия по уклонению, что будет более подробно описано далее.
[0026] Секция 20 формирования маршрута формирует маршрут для выполнения действия по обходу. Секция 21 управления транспортным средством (схема управления транспортным средством) предпринимает действия по уклонению, управляя различными исполнительными механизмами (такими как привод рулевого управления, привод педали акселератора и привод тормоза) основного транспортного средства, используя информацию от различных датчиков для прохождения по сформированному маршруту секцией 20 формирования маршрута. Как будет описано далее, в случае, когда приоритет основного транспортного средства является низким, секция 21 управления транспортным средством устанавливает время с момента, когда соответствующее транспортное средство останавливается, до того, когда основное транспортное средство начинает действие по уклонению от соответствующего транспортного средства, более коротким, чем в случае, когда приоритет основного транспортного средства является высоким.
[0027] Далее будет описан пример работы устройства прогнозирования поведения транспортного средства со ссылкой на фиг. 2-5.
[0028] В примере, показанном на фиг.2, основное транспортное средство 30 и соответствующее транспортное средство 40 движутся навстречу друг другу на узкой дороге. В этом случае одно из основного транспортного средства 30 и соответствующего транспортного средства 40 должно уступить дорогу другому. Здесь предположим, что соответствующее транспортное средство 40 остановилось. В случае, когда основное транспортное средство 30 и соответствующее транспортное средство 40 не могут обмениваться информацией друг с другом, трудно определить, указывает ли остановка соответствующего транспортного средства 40 на намерение уступить право проезда или намерение не уступать право проезда. В случае, когда основное транспортное средство 30 не может определить намерение соответствующего транспортного средства 40 в течение определенного времени после того, как соответствующее транспортное средство 40 остановилось, поскольку соответствующее транспортное средство 40 не показывает никаких явных действий, основное транспортное средство 30 не может продолжить движение. Следовательно, основному транспортному средству 30 необходимо предпринять некоторые действия. В качестве примера действия, которое может предпринять основное транспортное средство 30, возможно, что основное транспортное средство 30 начинает действие, чтобы избегать соответствующего транспортного средства 40, когда время остановки, то есть время, с которого соответствующее транспортное средство 40 остановилось, становится или превышает указанное время. В частности, как показано на фиг.3, возможно, что основное транспортное средство 30 предпринимает действия по уклонению, когда время остановки соответствующего транспортного средства 40 стало равным или превысило время T2. Например, если основное транспортное средство 30 предпринимает действия, такие как движение назад, и основное транспортное средство 30 и соответствующее транспортное средство 40 могут проезжать мимо друг друга, то основное транспортное средство 30 может продолжить движение.
[0029] Следует отметить, что указанное выше установленное время определяется в соответствии с заранее установленным порогом, и время T2 определяется в соответствии с первым порогом, как показано на фиг.3. Этот порог является индикатором для начала действия избегания и может быть определен экспериментом или моделированием. Следует отметить, что время T2 не ограничено конкретным значением. Например, оно может составлять 5 секунд.
[0030] Между тем, хотя было описано, что основное транспортное средство 30 предпринимает действие по уклонению, когда время остановки соответствующего транспортного средства 40 становится или превышает время T2, если основное транспортное средство 30 может предпринять действие по уклонению после более короткого времени остановки, основное транспортное средство 30 может принять меры по уклонению в кратчайшие сроки. В частности, если основное транспортное средство 30 может предпринять действие избегания, когда время остановки соответствующего транспортного средства 40 становится или превышает, например, время T1, которое проиллюстрировано на фиг.3, и меньше, чем время T2, основное транспортное средство 30 может принять действия по уклонению в кратчайшие сроки. Другими словами, для устройства прогнозирования поведения транспортного средства согласно настоящему варианту осуществления время от момента, когда соответствующее транспортное средство 40 останавливается, до того, когда основное транспортное средство 30 начинает действие, чтобы избежать соответствующего транспортного средства 40, является коротким, так что основное транспортное средство 30 может принять меры по уклонению в кратчайшие сроки.
[0031] Следовательно, в настоящем варианте осуществления, в случае, когда приоритет основного транспортного средства 30 ниже, чем приоритет соответствующего транспортного средства 40, секция 17 изменения порога изменяет порог с первого порога на второй порог. Поскольку второе пороговое значение меньше первого порогового значения, основное транспортное средство 30 может предпринимать действия по уклонению после более короткого времени остановки.
[0032] Далее будет подробно описан приоритет. Секция 16 определения приоритета определяет приоритет на основе информации, полученной из секции 14 получения информации о соответствующем транспортном средстве, секции 15 получения структуры дороги и т.п. Например, секция 16 определения приоритета может определять приоритет на основе типа транспортного средства соответствующего транспортного средства 40 как атрибута соответствующего транспортного средства 40. Например, в случае, когда соответствующее транспортное средство 40 представляет собой тяжелое транспортное средство, автобус, грузовой автомобиль или тому подобное, секция 16 определения приоритета может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это связано с тем, что чем больше соответствующее транспортное средство относительно ширины дороги, тем больше времени требуется для выполнения действий по предотвращению движения, например, движения назад. В случае, когда соответствующее транспортное средство 40 является транспортным средством скорой помощи, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Секция 16 определения приоритета может определять приоритет с использованием разницы в ширине транспортного средства между основным транспортным средством 30 и соответствующим транспортным средством 40 или соотношением транспортных средств. В случае, когда основное транспортное средство 30 является обычным легковым автомобилем, и когда соответствующее транспортное средство 40 является тяжелым транспортным средством, автобусом, грузовиком и т.п., секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30.
[0033] Секция 16 определения приоритета может определять приоритет на основе знака, размещенного на соответствующем транспортном средстве 40, в качестве атрибута соответствующего транспортного средства 40. Примеры знака, размещенного на транспортном средстве, включают в себя знак начинающего водителя и знак пожилого водителя. Следует отметить, что знаки, размещенные на транспортном средстве, могут включать в себя знак для инвалидов и знак для слабослышащих. В случае, когда на соответствующем транспортном средстве 40 имеется знак начинающего водителя или знак пожилого водителя, размещенный на нем, секция 16 определения приоритета может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это объясняется тем, что в случае, когда на транспортном средстве размещается знак, такой как знак начинающего водителя или знак пожилого водителя, водитель этого транспортного средства стремится занять определенное время, чтобы предпринять действия по предотвращению движения, такие как движение назад.
[0034] Секция 16 определения приоритета может определять приоритет на основе информации об окружающей среде основного транспортного средства 30 или соответствующего транспортного средства 40. Примеры информации об окружающей среде основного транспортного средства 30 и соответствующего транспортного средства 40 включают дорожные структуры вокруг основного транспортного средства 30 или соответствующего транспортного средства 40. Например, в случае, когда дорожная структура позади соответствующего транспортного средства 40 представляет собой дорогу с уклоном в качестве дорожной структуры вокруг соответствующего транспортного средства 40, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше приоритета основного транспортного средства 30. Это происходит потому, что в случае, когда дорожная структура позади соответствующего транспортного средства 40 представляет собой уклонную дорогу, соответствующему транспортному средству 40 трудно проверять области позади него. В случае, когда и основное транспортное средство 30, и соответствующее транспортное средство 40 находятся на дороге с уклоном, и когда основное транспортное средство 30 расположено на склоне с более высокой стороны уклона, а соответствующее транспортное средство 40 расположено на подъеме на нижней на стороне градиента секция 16 определения приоритета может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это связано с тем, что соответствующему транспортному средству 40 необходимо начать движение в гору, и двигаться вперед труднее.
[0035] В случае, когда дорожная структура позади соответствующего транспортного средства 40 является железнодорожным переездом, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это происходит потому, что в случае, когда дорожная структура позади является железнодорожным переездом, соответствующему транспортному средству 40 трудно двигаться назад. В случае, когда позади соответствующего транспортного средства 40 имеется структура, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. В случае, когда дорожная структура позади соответствующего транспортного средства 40 является школьной зоной, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это происходит потому, что в случае, когда дорожная структура позади является школьной зоной, для соответствующего транспортного средства 40 трудно двигаться назад. Школьные зоны означают школьные дороги, предназначенные для детских садов и начальных школ, в которые запрещен въезд транспортных средств в часы работы. В случае, когда ширина дороги позади соответствующего транспортного средства 40 меньше ширины дороги позади основного транспортного средства 30, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это происходит потому, что в случае, когда ширина дороги позади соответствующего транспортного средства 40 меньше ширины дороги позади основного транспортного средства 30, соответствующему транспортному средству 40 трудно двигаться назад.
[0036] В случае, когда дорожная структура позади соответствующего транспортного средства 40 является местом прохождения, как показано на фиг.4, секция 16 определения приоритета может определять приоритет на основе интенсивности движения в этом месте прохождения. Например, в случае, когда интенсивность движения в месте прохождения позади соответствующего транспортного средства 40 превышает определенную величину, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Дорожная структура позади основного транспортного средства 30 является местом прохождения, и секция 16 определения приоритета может определять приоритет на основе интенсивности движения в этом месте прохождения. Например, в случае, когда объем трафика в месте прохождения позади основного транспортного средства 30 меньше или равен определенной величине, секция 16 определения приоритета может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30.
[0037] Секция 16 определения приоритета может присваивать оценку баллов информации, полученной из секции 14 получения информации о соответствующем транспортном средстве, секции 15 получения структуры дороги и т.п., и может определять, что тот, кто имеет более высокую оценку, имеет более высокий приоритет. Например, в случае, когда основное транспортное средство 30 является обычным транспортным средством, а соответствующее транспортное средство 40 является тяжелым транспортным средством, 2 балла добавляются к основному транспортному средству 30 и 3 балла добавляются к соответствующему транспортному средству 40, как показано на фиг. 5А. В случае, когда дорожная структура позади основного транспортного средства 30 представляет собой дорогу с уклоном, а дорожная структура позади соответствующего транспортного средства 40 представляет собой железнодорожный переезд, 1 балл добавляется к основному транспортному средству 30 и 3 балла добавляется к соответствующему транспортному средству 40, как показано на фиг. 5B. В случае, когда на соответствующем транспортном средстве 40 размещен знак начинающего водителя, к соответствующему транспортному средству 40 добавляется 1 балл, как показано на фиг. 5C. Общее количество баллов, добавленных к основному транспортному средству 30, равно 3, а общее количество баллов, добавленных к соответствующему транспортному средству 40, равно 7. Таким образом, секция 16 определения приоритета определяет, что приоритет соответствующего транспортного средства 40 выше приоритета основного транспортного средства 30. Как описано выше, секция 16 определения приоритета может определять приоритет путем взвешивания атрибутов соответствующего транспортного средства 40 и основного транспортного средства 30 и информации об окружающей среде соответствующего транспортного средства 40 и основного транспортного средства 30. Секция 16 определения приоритета может определять приоритет путем взвешивания атрибутов соответствующего транспортного средства 40 и информации об окружающей среде соответствующего транспортного средства 40 или основного транспортного средства 30.
[0038] Как было описано выше, секция 16 определения приоритета может определять приоритет, используя одну часть информации, полученный из секции 14 получения информации о соответствующем транспортном средстве, секции 15 получения структуры дороги или тому подобное, или путем объединения частей информация.
[0039] На основании приоритета, определенного секцией 16 определения приоритета, секция 17 изменения порога изменяет порог. В случае, когда приоритет основного транспортного средства 30 ниже, чем приоритет соответствующего транспортного средства 40, секция 17 изменения порога изменяет порог с первого порога, показанного на фиг.3, на второй порог. Следует отметить, что второй порог может быть определен, например, посредством взвешивания информации, полученной из секции 14 получения информации о соответствующем транспортном средстве, секции 15 получения структуры дороги или тому подобного, и добавления каждой порции взвешенной информации. Второй порог выражается уравнением 1:
[0040] второй порог = a1 × b1 + a2 × b2 + a3 × b3 + a4 × b4 + a5 × b5 + a6 × b6 + a7 × b7 … (1)
где a1-a7 - коэффициенты. Символ b1 представляет количество движения позади соответствующего транспортного средства 40. Символ b2 представляет объем трафика позади основного транспортного средства 30. Символ b3 представляет структуру дороги позади соответствующего транспортного средства 40. Символ b4 представляет дорожную структуру позади основного транспортного средства 30. Символ b5 представляет тип транспортного средства основного транспортного средства 30. Символ b6 представляет тип транспортного средства соответствующего транспортного средства 40. Символ b7 представляет знак, размещенный на соответствующем транспортном средстве 40. Символы с b3 по b7 определяются на основании фиг. 5А-5С.
[0041] Пример работы устройства прогнозирования поведения транспортного средства
Далее будет описан пример работы устройства прогнозирования поведения транспортного средства со ссылкой на блок-схему последовательности операций с фиг.6. Эта блок-схема запускается, например, при включении зажигания.
[0042] На этапе S101 устройство 1 обнаружения объектов обнаруживает объекты (например, другие соответствующие транспортные средства) вокруг основного транспортного средства с помощью множества датчиков обнаружения объектов. Затем процесс переходит к этапу S103, на котором секция 4 интеграции обнаружения объединяет множество частей результата обнаружения, полученных из множества датчиков обнаружения объектов, и выводит одну часть результата обнаружения для каждого соответствующего транспортного средства. Затем секция 5 отслеживания объектов отслеживает каждое соответствующее транспортное средство, обнаруженное и интегрированное.
[0043] Далее процесс переходит к этапу S105, на котором устройство 2 оценки положения основного транспортного средства измеряет абсолютное положение основного транспортного средства с помощью датчика определения положения. Процесс переходит к этапу S107, на котором устройство 3 получения карты получает информацию о карте, указывающую структуры дороги, по которой движется основное транспортное средство. Процесс переходит к этапу S109, на котором секция 6 вычисления положения на карте оценивает положение и ориентацию основного транспортного средства на карте из абсолютного положения основного транспортного средства, измеренного на этапе S105, и данных карты, полученных на этапе S107.
[0044] Далее процесс переходит к этапу S111, на котором, если соответствующее транспортное средство останавливается (Да на этапе S111), процесс переходит к этапу S112. С другой стороны, если соответствующее транспортное средство не остановлено (Нет на этапе S111), процесс возвращается к этапу S101.
[0045] На этапе S112 контроллер 100 определяет, является ли дорога, по которой движется основное транспортное средство, узкой дорогой, по которой основному транспортному средству и соответствующему транспортному средству трудно проехать мимо друг друга. Если дорога, по которой движется основное транспортное средство 30, является узкой дорогой, по которой основному транспортному средству 30 и соответствующему остановленному транспортному средству 40 трудно проехать мимо друг друга, как показано на фиг. 2 (Да на этапе S112), процесс переходит к этапу S113. С другой стороны, если дорога, по которой движется основное транспортное средство 30, не является узкой дорогой, по которой основному транспортному средству 30 и остановленному соответствующему транспортному средству 40 трудно проехать мимо (Нет на этапе S112), процесс возвращается к этапу S101.
[0046] На этапе S113 секция 12 измерения времени остановки измеряет время, в течение которого соответствующее транспортное средство 40 остановилось. Процесс переходит к этапу S115, на котором секция 15 получения структуры дороги получает дорожные структуры вокруг основного транспортного средства 30 и соответствующего транспортного средства 40. Процесс переходит к этапу S117, на котором секция 14 получения информации о соответствующем транспортном средстве получает информацию о соответствующем транспортном средстве 40. Процесс переходит к этапу S119, на котором секция 16 определения приоритета определяет приоритет на основе информации, полученной из секции 14 получения информации о соответствующем транспортном средстве, секции 15 получения структуры дороги или тому подобного.
[0047] Процесс переходит к этапу S121, на котором, если приоритет основного транспортного средства 30 ниже, чем приоритет соответствующего транспортного средства 40, секция 17 изменения порога изменяет порог с первого порога на второй порог, как проиллюстрировано на фиг.3. Далее, процесс переходит к этапу S123, на котором, если время остановки соответствующего транспортного средства 40 короче первого порогового значения (Нет на этапе S123), процесс ожидает. С другой стороны, если время остановки соответствующего транспортного средства 40 становится или превышает первое пороговое значение (Да на этапе S123), процесс переходит к этапу S125, и секция 21 управления транспортным средством предпринимает действие по уклонению.
[0048] Эксплуатационное преимущество
Как было описано выше, устройство прогнозирования поведения транспортного средства в соответствии с настоящим вариантом осуществления обеспечивает следующие эксплуатационные преимущества.
[0049] В случае, когда приоритет основного транспортного средства 30 ниже, чем приоритет соответствующего транспортного средства 40, устройство прогнозирования поведения транспортного средства изменяет порог с первого порога на второй порог (см. Фиг.3). В частности, в случае, когда приоритет основного транспортного средства 30 является низким, устройство прогнозирования поведения транспортного средства устанавливает время с момента, когда соответствующее транспортное средство 40 останавливается, до того, когда основное транспортное средство 30 начинает действие по уклонению от соответствующего транспортного средства 40, более коротким, чем в случае, когда приоритет основного транспортного средства 30 является высоким. На участке дороги, на котором транспортным средствам трудно проезжать мимо друг друга, в случае, когда основное транспортное средство 30 и соответствующее транспортное средство 40 не могут обмениваться информацией, трудно узнать намерение соответствующего транспортного средства 40 на основе того факта, что соответствующее транспортное средство 40 остановилось. Следовательно, в случае, когда приоритет основного транспортного средства 30 является низким, устройство прогнозирования поведения транспортного средства устанавливает время от того, когда соответствующее транспортное средство 40 останавливается, до того, когда основное транспортное средство 30 начинает действие по уклонению от соответствующего транспортного средства 40, более коротким, чем в случае, когда приоритет основного транспортного средства 30 является высоким. Это позволяет устройству прогнозирования поведения транспортного средства своевременно предпринимать действия по уклонению.
[0050] Устройство прогнозирования поведения транспортного средства может определять приоритет на основе атрибутов соответствующего транспортного средства 40. В зависимости от характеристик соответствующего транспортного средства 40 соответствующему транспортному средству 40 может быть трудно предпринять действия по уклонению. Устройство прогнозирования поведения транспортного средства определяет приоритет на основе атрибутов соответствующего транспортного средства 40, чтобы оно могло быстро предпринять действия по уклонению.
[0051] Устройство прогнозирования поведения транспортного средства может определять приоритет на основе информации об окружающей среде соответствующего транспортного средства 40 или основного транспортного средства 30. В зависимости от информации об окружающей среде соответствующего транспортного средства 40 или основного транспортного средства 30 соответствующему транспортному средству 40 может быть трудно предпринять действия по уклонению. Устройство прогнозирования поведения транспортного средства определяет приоритет на основе информации об окружающей среде соответствующего транспортного средства 40 или основного транспортного средства 30, чтобы оно могло быстро предпринять действия по уклонению.
[0052] Устройство прогнозирования поведения транспортного средства может определять приоритет путем взвешивания атрибутов соответствующего транспортного средства 40 и информации об окружающей среде соответствующего транспортного средства 40 или основного транспортного средства 30. Взвешивая каждую часть информации, как показано на фиг. 5A-5C, устройство прогнозирования поведения транспортного средства может определять приоритет с учетом различных ситуаций. Следует отметить, что устройство прогнозирования поведения транспортного средства может определять приоритет путем взвешивания атрибутов соответствующего транспортного средства 40 и основного транспортного средства 30 и информации об окружающей среде соответствующего транспортного средства 40 и основного транспортного средства 30.
[0053] Устройство прогнозирования поведения транспортного средства может определять приоритет на основе дорожных структур вокруг соответствующего транспортного средства 40. В зависимости от структуры дороги вокруг соответствующего транспортного средства 40 соответствующему транспортному средству 40 может быть трудно предпринять действия по предотвращению движения. Следовательно, устройство прогнозирования поведения транспортного средства определяет приоритет на основе дорожных структур вокруг соответствующего транспортного средства 40. В случае, когда приоритет основного транспортного средства 30 является низким, устройство прогнозирования поведения транспортного средства устанавливает время от момента, когда соответствующее транспортное средство 40 останавливается, до того, когда основное транспортное средство 30 начинает действие по уклонению от соответствующего транспортного средства 40, более коротким, чем в случай, когда приоритет основного транспортного средства 30 является высоким. Это позволяет устройству прогнозирования поведения транспортного средства своевременно предпринимать действия по уклонению.
[0054] В случае, когда позади соответствующего транспортного средства 40 имеется уклон дороги, устройство прогнозирования поведения транспортного средства может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. В случае, когда позади соответствующего транспортного средства 40 имеется уклон дороги, соответствующему транспортному средству 40 может быть трудно предпринять действия по предотвращению движения, поскольку соответствующему транспортному средству 40 трудно проверить области позади него. В случае, когда позади соответствующего транспортного средства 40 имеется уклон дороги, устройство прогнозирования поведения транспортного средства определяет, что приоритет соответствующего транспортного средства 40 является высоким, так что оно может быстро предпринять действия по предотвращению движения.
[0055] В случае, когда за соответствующим транспортным средством 40 имеется железнодорожный переезд, устройство прогнозирования поведения транспортного средства может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. В случае, когда за соответствующим транспортным средством 40 имеется железнодорожный переезд, соответствующему транспортному средству 40 может быть трудно предпринять действия по предотвращению движения. В случае, когда за основным транспортным средством 40 находится железнодорожный переезд, устройство прогнозирования поведения транспортного средства определяет, что приоритет соответствующего транспортного средства 40 является высоким, так что оно может быстро предпринять действия по уклонению.
[0056] В случае, когда позади соответствующего транспортного средства 40 имеется школьная зона, устройство прогнозирования поведения транспортного средства может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. В случае, когда позади соответствующего транспортного средства 40 имеется школьная зона, соответствующему транспортному средству 40 может быть трудно предпринять действия по предотвращению движения. В случае, когда позади соответствующего транспортного средства 40 имеется школьная зона, устройство прогнозирования поведения транспортного средства определяет, что приоритет соответствующего транспортного средства 40 является высоким, так что оно может быстро предпринять действия по уклонению.
[0057] В случае, когда ширина дороги в точке, в которой находится соответствующее транспортное средство 40, меньше ширины дороги в точке, в которой находится основное транспортное средство 30, устройство прогнозирования поведения транспортного средства может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. В случае, когда ширина дороги в точке, в которой расположено соответствующее транспортное средство 40, меньше ширины дороги в точке, в которой находится основное транспортное средство 30, соответствующему транспортному средству 40 может быть трудно предпринять действия по уклонению движения. В случае, когда ширина дороги в точке, в которой расположено соответствующее транспортное средство 40, меньше ширины дороги в точке, где расположено основное транспортное средство 30, устройство прогнозирования поведения транспортного средства определяет, что приоритет соответствующего транспортного средства 40 является высоким, так что он может предпринять действия по уклонению в кратчайшие сроки.
[0058] В случае, когда интенсивность движения в месте прохождения вокруг соответствующего транспортного средства 40 больше или равна определенной величине, устройство прогнозирования поведения транспортного средства может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это позволяет устройству прогнозирования поведения транспортного средства своевременно предпринимать действия по уклонению. В случае, когда объем движения в месте прохождения вокруг основного транспортного средства 30 меньше или равен заданному количеству, устройство прогнозирования поведения транспортного средства может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Это позволяет устройству прогнозирования поведения транспортного средства своевременно предпринимать действия по уклонению.
[0059] Устройство прогнозирования поведения транспортного средства может определять приоритет на основе типа транспортного средства соответствующего транспортного средства 40. В зависимости от типа транспортного средства соответствующего транспортного средства 40 соответствующему транспортному средству 40 может быть трудно предпринять действия по уклонению. Следовательно, устройство прогнозирования поведения транспортного средства определяет приоритет на основе типа транспортного средства соответствующего транспортного средства 40. Затем, в случае, когда приоритет основного транспортного средства 30 является низким, устройство прогнозирования поведения транспортного средства устанавливает время с момента, когда соответствующее транспортное средство 40 останавливается, до того, когда основное транспортное средство 30 начинает действие, чтобы соответствующее транспортное средство 40 было короче, чем в случае, когда приоритет основного транспортного средства 30 является высоким. Это позволяет устройству прогнозирования поведения транспортного средства своевременно предпринимать действия по уклонению.
[0060] Устройство прогнозирования поведения транспортного средства может определять приоритет на основе знака, размещенного на соответствующем транспортном средстве 40. В зависимости от знака, размещенного на соответствующем транспортном средстве 40, соответствующему транспортному средству 40 может быть трудно предпринять действия по уклонению. Следовательно, устройство прогнозирования поведения транспортного средства определяет приоритет на основе знака, размещенного на соответствующем транспортном средстве 40. Затем, в случае, когда приоритет основного транспортного средства 30 является низким, устройство прогнозирования поведения транспортного средства устанавливает время с момента, когда соответствующее транспортное средство 40 останавливается, до того, когда основное транспортное средство 30 начинает действие по уклонению от соответствующего транспортного средства 40, более коротким, чем в случае, когда приоритет основного транспортного средства 30 является высоким. Это позволяет устройству прогнозирования поведения транспортного средства своевременно предпринимать действия по уклонению.
[0061] Каждая функция, описанная в вышеприведенном варианте осуществления, может быть реализована с использованием одной или нескольких схем обработки. Примеры схем обработки включают в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Примеры схем обработки включают в себя специализированную интегральную схему (ASIC) и устройство, такое как часть схемы, которые выполнены с возможностью реализации описанных функций. Устройство прогнозирования поведения транспортного средства может улучшать функции компьютера.
[0062] Хотя вариант осуществления настоящего изобретения был описан выше, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия, ограничивают данное изобретение. Из этого раскрытия для специалистов в данной области техники будут очевидны различные альтернативные варианты осуществления, примеры и способы работы.
[0063] Например, устройство прогнозирования поведения транспортного средства может определять приоритет на основе позиции остановки соответствующего транспортного средства 40. Можно оценить, что соответствующее транспортное средство 40 не намерено уступать дорогу в том случае, когда соответствующее транспортное средство 40 остановилось в центре ширины дороги. С другой стороны, можно оценить, что соответствующее транспортное средство 40 намеревается предоставить право проезда в случае, когда соответствующее транспортное средство 40 остановилось на краю ширины дороги. Следовательно, устройство прогнозирования поведения транспортного средства получает расстояние от центрального положения ширины дороги до центрального положения соответствующего транспортного средства 40 в направлении ширины транспортного средства. Затем в случае, когда это расстояние меньше или равно заданному значению, устройство прогнозирования поведения транспортного средства может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30.
[0064] В состоянии, когда соответствующее транспортное средство 40 остановлено, устройство прогнозирования поведения транспортного средства может двигаться вперед и определять приоритет на основе реакции соответствующего транспортного средства 40 на это движение вперед. В случае, когда соответствующее транспортное средство 40 продолжает останавливаться после того, как основное транспортное средство 30 движется вперед, устройство прогнозирования поведения транспортного средства может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30.
[0065] Следует отметить, что хотя на фиг.3 была описана взаимосвязь между временем остановки соответствующего транспортного средства 40 и пороговым значением, предполагая, что взаимосвязь является линейной (прямая линия), такая взаимосвязь не ограничивается линейными. Соотношение между временем остановки соответствующего транспортного средства 40 и пороговым значением может быть нелинейным.
[0066] Устройство прогнозирования поведения транспортного средства может прогнозировать маршрут, по которому будет следовать остановленное соответствующее транспортное средство 40, и основное транспортное средство 30 может предпринять действия, чтобы избежать прогнозируемого маршрута.
[0067] В случае, когда соответствующее транспортное средство 40 выехало на узкую дорогу раньше, чем основное транспортное средство 30, устройство прогнозирования поведения транспортного средства может определить, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. В случае, когда соответствующее транспортное средство 40 выехало на узкую дорогу раньше, чем основное транспортное средство 30, расстояние, на которое транспортное средство 40 прошло, может быть больше, чем расстояние, на которое транспортное средство 30 проехало на узкой дороге. В этом случае действия по уклонению, предпринимаемые основным транспортным средством 30 в более ранние сроки, могут минимизировать влияние, накладываемое на поток трафика.
[0068] В случае, когда позади основного транспортного средства 30 имеется перекресток, и когда соответствующее транспортное средство 40 настроено на сигнал поворота, устройство прогнозирования поведения транспортного средства может определять, что приоритет соответствующего транспортного средства 40 выше, чем приоритет основного транспортного средства 30. Действия по уклонению, предпринимаемые основным транспортным средством 30 в более ранние сроки, позволят соответствующему транспортному средству 40 быстро поворачивать, что, в свою очередь, позволяет основному транспортному средству 30 плавно двигаться вперед.
Перечень ссылочных позиций
[0069] 1 - устройство обнаружения объектов
2 - устройство оценки местоположения основного транспортного средства
3 - устройство получения карты
4 - секция интеграции обнаружения
5 - секция отслеживания объектов
6 - секция вычисления положения на карте
10 - секция прогнозирования поведения
11 - секция получения информации о узкой дороге
12 - секция измерения времени остановки
13 – секция получения информации о месте прохождения
14 - секция сбора информации о соответствующем транспортном средстве
15 - секция получения структуры дороги
16 - секция определения приоритета
17 - секция изменения порога
20 - секция формирования маршрута
21 - секция управления транспортным средством
100 - контроллер
Изобретение относится к способу и устройству прогнозирования поведения транспортного средства. Способ прогнозирования поведения транспортного средства, при котором для участка дороги, на котором основному транспортному средству и соответствующему транспортному средству трудно проехать мимо друг друга, определяют приоритет основного транспортного средства и соответствующего транспортного средства, когда основное транспортное средство и соответствующее транспортное средство проходят по участку дороги и устанавливают период времени от момента остановки соответствующего транспортного средства до момента начала действия основного транспортного средства по уклонению от соответствующего транспортного средства. Период устанавливают так, чтобы он был короче в случае, когда приоритет основного транспортного средства является низким, чем в случае, когда приоритет основного транспортного средства является высоким. Достигается повышение безопасности управления транспортным средством. 2 н. и 13 з.п. ф-лы, 8 ил.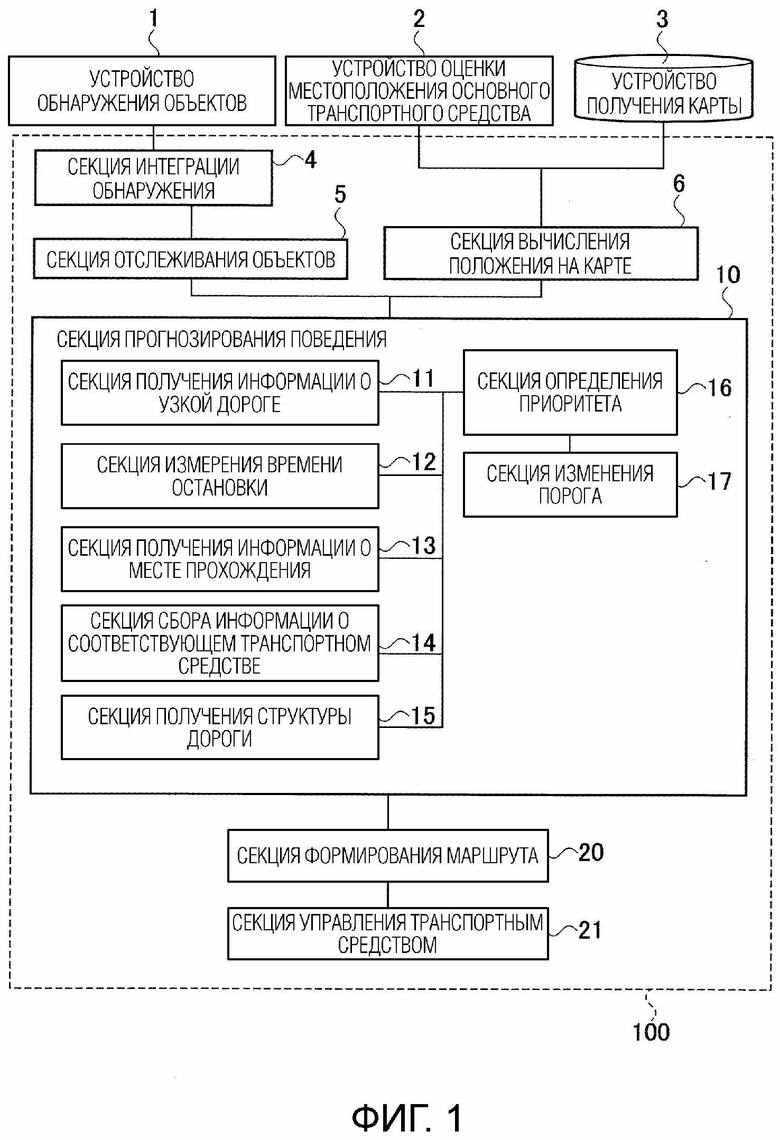
1. Способ прогнозирования поведения транспортного средства, при котором:
для участка дороги, на котором основному транспортному средству и соответствующему транспортному средству трудно проехать мимо друг друга,
определяют приоритет основного транспортного средства и соответствующего транспортного средства, когда основное транспортное средство и соответствующее транспортное средство проходят по участку дороги; и
устанавливают период времени от момента остановки соответствующего транспортного средства до момента начала действия основного транспортного средства по уклонению от соответствующего транспортного средства, чтобы он был короче в случае, когда приоритет основного транспортного средства является низким, чем в случае, когда приоритет основного транспортного средства является высоким.
2. Способ прогнозирования поведения транспортного средства по п.1, при котором приоритет определяют на основе атрибута соответствующего транспортного средства.
3. Способ прогнозирования поведения транспортного средства по п.1 или 2, при котором приоритет определяют на основе информации об окружающей среде соответствующего транспортного средства или основного транспортного средства.
4. Способ прогнозирования поведения транспортного средства по п.3, при котором приоритет определяют путем взвешивания атрибута соответствующего транспортного средства и информации об окружающей среде соответствующего транспортного средства или основного транспортного средства.
5. Способ прогнозирования поведения транспортного средства по п.3 или 4, при котором информация об окружающей среде соответствующего транспортного средства представляет собой дорожную структуру вокруг соответствующего транспортного средства.
6. Способ прогнозирования поведения транспортного средства по п.5, при котором в случае, когда дорожная структура позади соответствующего транспортного средства представляет собой дорогу с уклоном, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
7. Способ прогнозирования поведения транспортного средства по п.5 или 6, при котором в случае, когда дорожная структура позади соответствующего транспортного средства является железнодорожным переездом, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
8. Способ прогнозирования поведения транспортного средства по любому из пп.5-7, при котором в случае, когда дорожная структура позади соответствующего транспортного средства является школьной зоной, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
9. Способ прогнозирования поведения транспортного средства по любому из пп.5-8, при котором в случае, когда в дорожной структуре ширина дороги в положении соответствующего транспортного средства меньше ширины дороги в положении основного транспортного средства, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
10. Способ прогнозирования поведения транспортного средства по любому из пп.5-9, при котором в случае, когда дорожная структура представляет собой место прохождения и когда объем движения в месте прохождения вокруг соответствующего транспортного средства больше или равен установленной величине, или объем движения в месте прохождения вокруг основного транспортного средства меньше или равен установленной величине, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
11. Способ прогнозирования поведения транспортного средства по любому из пп.2-10, при котором атрибут соответствующего транспортного средства является типом транспортного средства соответствующего транспортного средства.
12. Способ прогнозирования поведения транспортного средства по любому из пп.2-11, при котором атрибутом соответствующего транспортного средства является знак, размещенный на соответствующем транспортном средстве.
13. Способ прогнозирования поведения транспортного средства по любому из пп.1-12, при котором в случае, когда соответствующее транспортное средство выехало на участок дороги раньше, чем основное транспортное средство, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
14. Способ прогнозирования поведения транспортного средства по любому из пп.1-13, при котором в случае, когда позади основного транспортного средства имеется перекресток и когда соответствующее транспортное средство включило сигнал поворота, определяют то, что приоритет соответствующего транспортного средства выше приоритета основного транспортного средства.
15. Устройство прогнозирования поведения транспортного средства, содержащее:
схему определения приоритета, которая для участка дороги, на котором основному транспортному средству и соответствующему транспортному средству трудно проехать мимо друг друга, определяет приоритет основного транспортного средства и соответствующего транспортного средства, когда основное транспортное средство и соответствующее транспортное средство проходят по указанному участку дороги; и
схему управления транспортным средством, которая устанавливает период времени от момента остановки соответствующего транспортного средства до момента начала действия основного транспортного средства по уклонению от соответствующего транспортного средства, чтобы он был короче в случае, когда приоритет основного транспортного средства является низким, чем в случае, когда приоритет основного транспортного средства является высоким.
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2624373C1 |

