Область техники
[0001]
Настоящее изобретение относится к способу прогнозирования поведения и устройству прогнозирования поведения для мобильного субъекта и транспортному средству.
Предпосылки изобретения
[0002]
В PTL 1 описывается устройство помощи при перемещении для транспортного средства, которое выполняет управление помощью при перемещении для обнаружения слепой зоны, вычисления, в предположении, что некоторый объект присутствует в слепой зоне, диапазона движения, когда объект выходит из нее, и выполнение операции уклонения во избежание столкновения транспортного средства с этим объектом.
СПИСОК ЦИТАТ
Патентная литература
[0003]
PTL 1: JP 2006-260217 А
Сущность изобретения
Техническая проблема
[0004]
Однако постоянное выполнение управления помощью при перемещении в предположении, что объект выходит из мертвой зоны, вызывает выполнение несущественной операции уклонения.
Целью настоящего изобретения является повышение точности прогнозирования вероятности того, что другой мобильный субъект войдет на полосу движения (для) перемещения, по которой перемещается главное транспортное средство.
РЕШЕНИЕ ПРОБЛЕМЫ
[0005]
Согласно одному аспекту настоящего изобретения предоставляется способ прогнозирования поведения мобильного субъекта, включающий в себя: определение позиции главного транспортного средства; определение позиции другого транспортного средства на второй полосе движения перемещения, причем вторая полоса движения перемещения является полосой, противоположной первой полосе движения перемещения, по которой перемещается главное транспортное средство; обнаружение пересекающего проезда, пересекающего вторую полосу движения перемещения, в позиции впереди главного транспортного средства; определение того, находится ли другое транспортное средство в пределах предопределенного диапазона от позиции пересечения пересекающего проезда и второй полосы движения перемещения до точки, удаленной от позиции пересечения на предопределенное расстояние в направлении, противоположном направлению перемещения транспортного средства во второй полосе движения перемещения, и другое транспортное средство находится либо в состоянии остановки, либо в состоянии замедления; и когда другое транспортное средство находится в пределах предопределенного диапазона, а другое транспортное средство находится в любом состоянии из состояния остановки и состояния замедления, прогнозирование наличия вероятности того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0006]
Согласно аспекту настоящего изобретения повышается точность прогнозирования вероятности того, что другой мобильный субъект войдет на полосу движения (для) перемещения, по которой перемещается главное транспортное средство.
Цель и преимущества изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007]
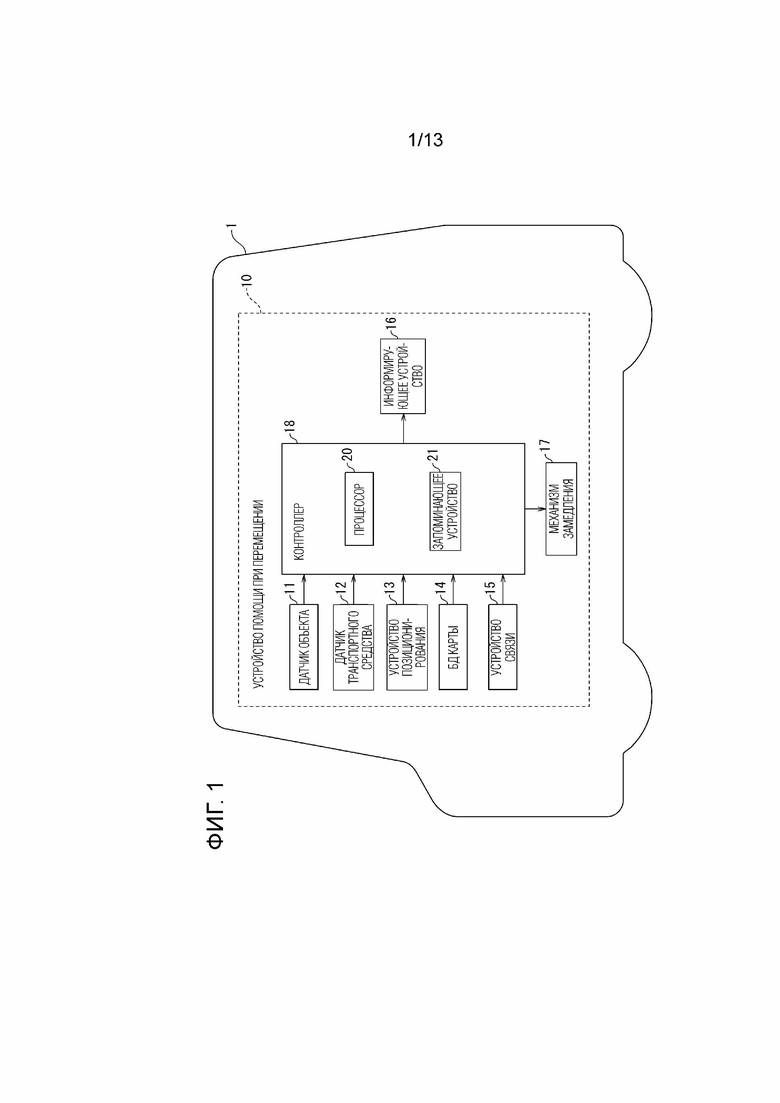
ФИГ. 1 - схематическая схема конфигурации транспортного средства согласно вариантам осуществления;
ФИГ. 2 - пояснительная схема способа прогнозирования поведения в первом варианте осуществления;
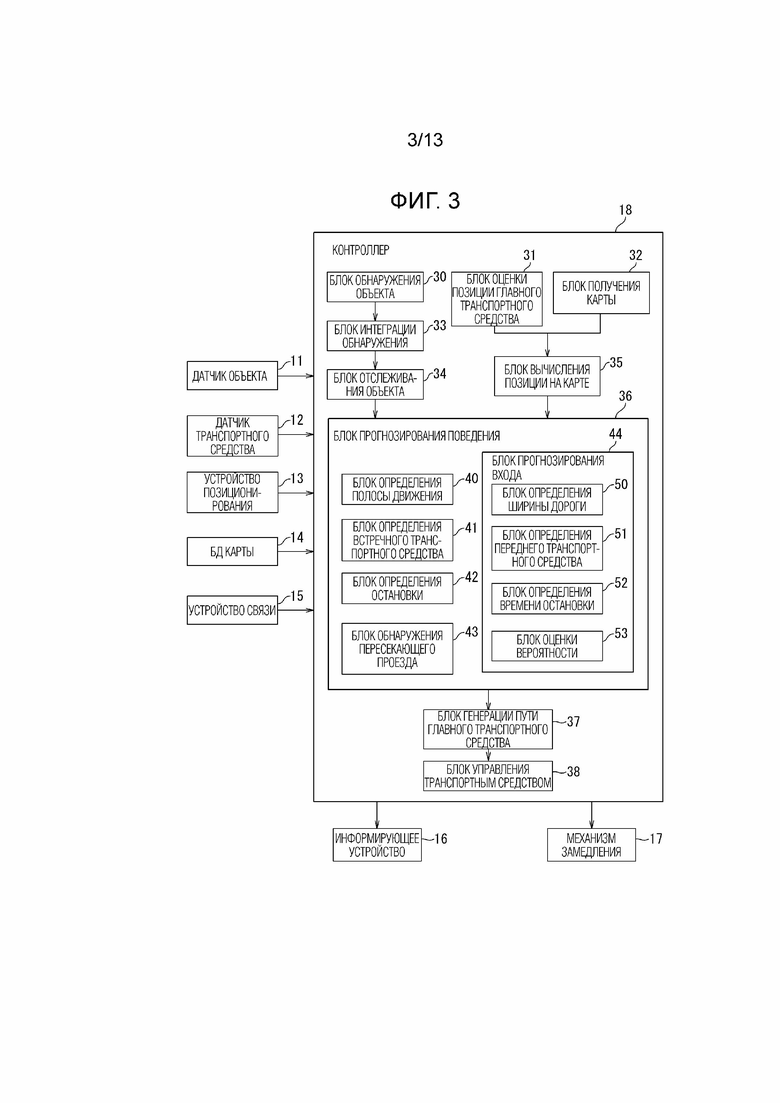
ФИГ. 3 - блок-схема, иллюстрирующая пример функциональной конфигурации устройства помощи при перемещении в первом варианте осуществления;
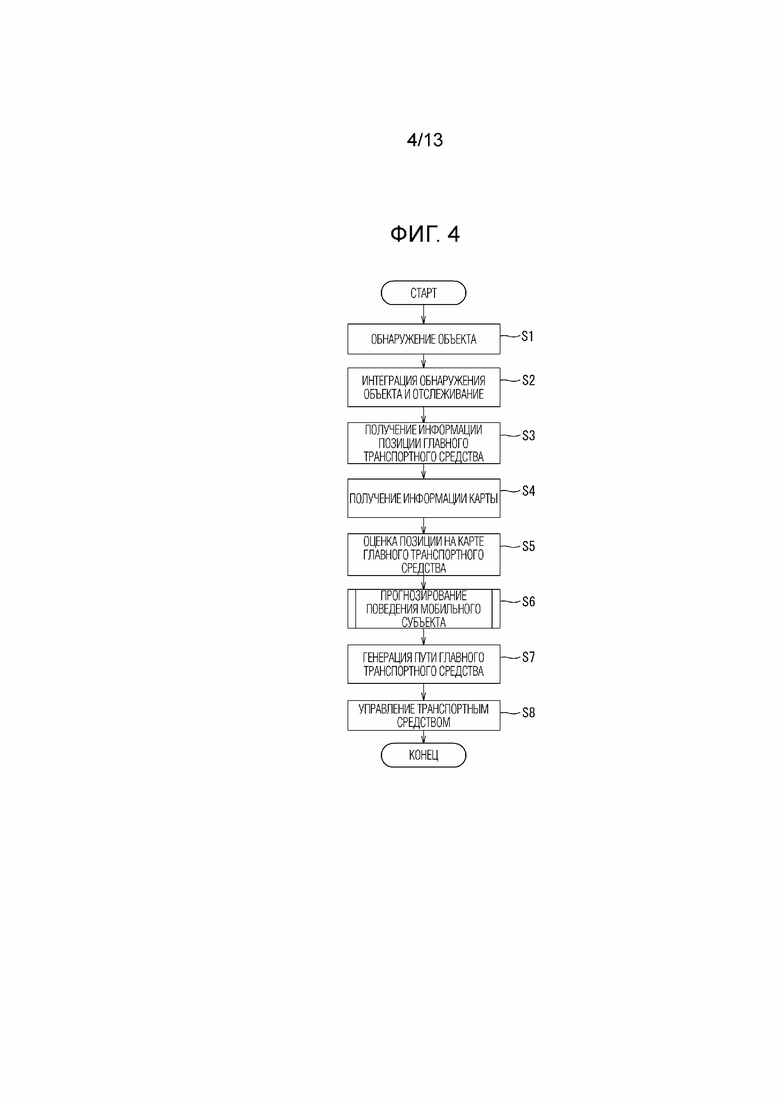
ФИГ. 4 - блок-схема примера способа помощи при перемещении согласно вариантам осуществления;
ФИГ. 5 - блок-схема процедуры прогнозирования поведения мобильного субъекта в первом варианте осуществления;
ФИГ. 6 - блок-схема процедуры прогнозирования входа мобильного субъекта в вариантах осуществления;
ФИГ. 7 - пояснительная схема способа прогнозирования поведения во втором варианте осуществления;
ФИГ. 8 - блок-схема, иллюстрирующая пример функциональной конфигурации устройства помощи при перемещении во втором варианте осуществления;
ФИГ. 9 - блок-схема процедуры прогнозирования поведения мобильного субъекта во втором варианте осуществления;
ФИГ. 10 - пояснительная схема способа прогнозирования поведения в третьем варианте осуществления;
ФИГ. 11 - пояснительная схема другого примера пересекающего проезда;
ФИГ. 12 - блок-схема, иллюстрирующая пример функциональной конфигурации устройства помощи при перемещении в третьем варианте осуществления; а также
ФИГ. 13 - блок-схема процедуры прогнозирования поведения мобильного субъекта в третьем варианте осуществления.
Описание вариантов осуществления
[0008]
Варианты осуществления настоящего изобретения теперь будут описаны со ссылкой на чертежи.
(Первый вариант осуществления)
(Конфигурация)
Со ссылкой на ФИГ. 1. Главное транспортное средство 1 включает в себя устройство 10 помощи при перемещении, сконфигурированное для выполнения помощи при перемещении для главного транспортного средства 1. Помощь при перемещении, выполняемая устройством 10 помощи при перемещении, может включать в себя управление автономным вождением для обеспечения автономного вождения главного транспортного средства 1 без участия водителя и управление помощью при вождении для помощи водителю в вождении главного транспортного средства 1 на основе среды перемещения вокруг главного транспортного средства 1.
Управление помощью при вождении может включать в себя не только управление перемещением, такое как автоматическое рулевое управление, автоматическое торможение, управление перемещением с постоянной скоростью, управление удержанием полосы движения и управление помощью при слиянии дорог, но также вывод сообщения, подсказывающего водителю выполнить операцию рулевого управления или операцию замедления.
[0009]
Устройство 10 помощи при перемещении включает в себя датчики 11 объекта, датчики 12 транспортного средства, устройство 13 позиционирования, базу данных 14 карт, устройство 15 связи, устройство 16 информирования, механизм 17 замедления и контроллер 18. База данных карт обозначена на чертежах как «БД карт».
Датчики 11 объектов включают в себя множество датчиков обнаружения объектов различных типов, таких как лазерный радар, радар миллиметрового диапазона и камера, которые установлены на главном транспортном средстве 1 и сконфигурированы для обнаружения объектов вокруг главного транспортного средства 1.
[0010]
Датчики 12 транспортного средства установлены на главном транспортном средстве 1 и обнаруживают различную информацию (сигналы транспортного средства), относящуюся к состоянию главного транспортного средства 1. Датчики 12 транспортного средства включают в себя, например, датчик скорости транспортного средства, сконфигурированный для обнаружения скорости перемещения (скорости транспортного средства) главного транспортного средства 1, датчики скорости вращения колес, сконфигурированные для обнаружения скорости вращения соответствующих шин, которые имеет главное транспортное средство 1, трехосный датчик ускорения (Датчик G), сконфигурированный для обнаружения ускорения (в том числе замедления) в трех осевых направлениях главного транспортного средства 1, датчик угла поворота рулевого колеса, сконфигурированный для обнаружения угла поворота рулевого колеса (в том числе угла поворота), гироскопический датчик, сконфигурированный для обнаружения угловой скорости, генерируемой в главном транспортном средстве 1, и датчик скорости рыскания, сконфигурированный для обнаружения скорости рыскания.
[0011]
Устройство 13 позиционирования включает в себя приемник глобальной навигационной спутниковой системы (GNSS) и принимает радиоволны от множества навигационных спутников и, таким образом, измеряет текущую позицию главного транспортного средства 1. Приемник GNSS может быть, например, приемником глобальной системы позиционирования (GPS). Устройство 13 позиционирования может быть, например, инерциальным навигационным устройством.
База данных 14 карт хранит данные карты высокой четкости (в дальнейшем называемые просто «карта высокой четкости»), которые подходят в качестве карты для автономного вождения. Карта высокой четкости - это картографические данные более высокого разрешения, чем картографические данные для навигации (в дальнейшем называемые просто «навигационная карта»), и включает в себя информацию о полосах движения, которая является более подробной, чем информация о дороге.
[0012]
Например, карта высокой четкости включает в себя в качестве информации о полосах движения информацию об узлах полос, которые указывают опорные точки на опорной линии полосы движения (например, центральную линию на полосе движения), и информацию о проезжих частях полос движения, которые указывают формы секций полос движения между узлами полосы движения.
Информация о каждом узле полосы движения включает в себя идентификационный номер и координаты позиции узла полосы движения, количество соединенных проезжих частей полос движения и идентификационные номера соединенных проезжих частей полос движения. Информация о каждой проезжей части полос движения включает в себя идентификационный номер проезжей части полос движения, тип полосы движения, ширину полосы движения, типы линий границ полосы движения, форму полосы движения, форму разметки полосы движения и форму опорной линии полосы движения. Карта высокой четкости дополнительно включает в себя типы и координаты позиции наземных объектов, таких как светофор, стоп-линия, дорожный знак, здание, столб, бордюр и пешеходный переход, которые существуют на полосе движения или в близи полосы движения, и информацию о наземных объектах, такую как идентификационные номера узлов полосы движения и идентификационные номера проезжих частей полос движения, которые соответствуют координатам позиции наземных объектов.
[0013]
Поскольку карта высокой четкости включает в себя информацию об узлах полосы движения и проезжих частях, можно указать полосу движения, по которой главное транспортное средство 1 перемещается по маршруту перемещения. Карта высокого разрешения имеет систему координат, которая может представлять позиции в направлении удлинения и направлении ширины каждой полосы движения. Карта высокого разрешения имеет координаты (например, долготу, широту и высоту над уровнем моря), которые могут представлять позиции в трехмерном пространстве, а полосы движения и вышеописанные наземные объекты могут быть описаны как формы в трехмерном пространстве.
[0014]
Устройство 15 связи выполняет беспроводную связь с устройством связи, внешним по отношению к главному транспортному средству 1. Способ связи, используемый устройством 15 связи, может представлять собой, например, беспроводную связь через сеть мобильной телефонной связи общего пользования, связь транспортное средство - транспортное средство, связь дорога - транспортное средство или спутниковую связь.
Устройство 16 информирования является устройством вывода информации, сконфигурированным для вывода информации, которую устройство 10 помощи при перемещении представляет водителю для помощи при перемещении (например, сообщение, подсказывающее водителю выполнить операцию рулевого управления или операцию замедления). Устройство 16 информирования может включать в себя, например, устройство отображения, лампу или измеритель, выводящий визуальную информацию, или динамик, выводящий звуковую информацию.
Механизм 17 замедления, использующий механический тормоз, моторный тормоз и рекуперативный тормоз, придает тормозное усилие вращению колес и тем самым снижает скорость перемещения главного транспортного средства 1.
[0015]
Контроллер 18 представляет собой электронный блок управления (ЭБУ), который выполняет управление вспомогательным перемещением главного транспортного средства 1. Контроллер 18 включает в себя процессор 20 и периферийные компоненты, такие как запоминающее устройство 21. Процессор 20 может быть, например, центральным процессором (CPU) или микропроцессором (MPU).
Запоминающее устройство 21 включает в себя полупроводниковое запоминающее устройство, магнитное запоминающее устройство, оптическое запоминающее устройство и т.п. Запоминающее устройство 21 может включать в себя регистры, кэш-память и память, такую как постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), которое используется в качестве основного запоминающего устройства.
[0016]
Функции контроллера 18, которые будут описаны ниже, могут быть реализованы, например, процессором 20, выполняющим компьютерные программы, хранящиеся в запоминающем устройстве 21.
Обратите внимание, что контроллер 18 может быть сформирован с использованием специального оборудования для выполнения обработки информации, которая будет описана ниже.
Например, контроллер 18 может включать в себя функциональную логическую схему, которая реализована в полупроводниковой интегральной схеме общего назначения. Например, контроллер 18 может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA) и т.п.
[0017]
Когда выполняется управление помощью при перемещении, контроллер 18 прогнозирует поведение другого мобильного субъекта, который входит (въезжает) в полосу движения, по которой перемещается главное транспортное средство 1, чтобы избежать столкновения с этим другим мобильным субъектом. Контроллер 18 является примером устройства прогнозирования поведения, описанного в формуле изобретения.
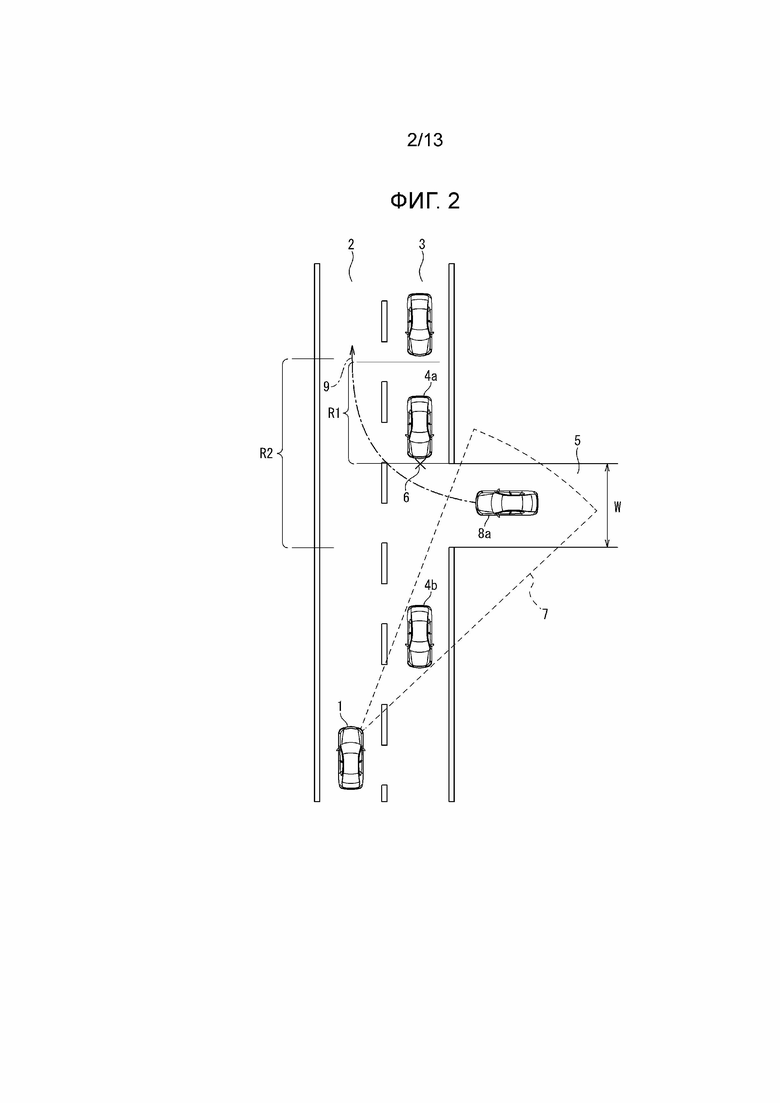
ФИГ. 2 иллюстрирует ситуацию, в которой главное транспортное средство 1 перемещается по первой полосе 2 движения перемещения, а другие транспортные средства 4а, 4b и так далее присутствуют на второй полосе 3 движения перемещения, которая является полосой движения, противоположной первой полосе 2 движения перемещения. Обратите внимание, что в примере, показанном на фиг. 2, транспортные средства перемещаются по левой стороне дороги. Другими словами, направление перемещения главного транспортного средства 1 (то есть направление перемещения транспортных средств на первой полосе 2 движения) - это направление, направленное от нижней стороны к верхней стороне на плоскости бумаги, а направление перемещения других транспортных средств 4а, 4b и так далее (то есть направление перемещения транспортных средств на второй полосе 3 движения) является направлением, направленным от верхней стороны к нижней стороне на плоскости бумаги. В следующих вариантах осуществления описание будет выполнено на примере случая, когда транспортные средства перемещаются по левой стороне дороги.
Пересекающий проезд 5, который пересекает вторую полосу 3 движения перемещения, существует перед главным транспортным средством 1. Пересекающий проезд 5 может быть, например, второстепенной дорогой или выездом из частной собственности. Например, второстепенная дорога может быть узкой дорогой стыковки, в точке стыковки которой со второй полосой 3 движения перемещения светофор не установлен.
[0018]
Когда другое транспортное средство 4а на второй полосе 3 движения находится в пределах предопределенного диапазона R1, расположенного перед позицией 6 пересечения, в котором пересекающий проезд 5 и вторая полоса 3 движения перемещения пересекаются друг с другом (то есть в предопределенном диапазоне от позиции 6 пересечения до точки, удаленной от точки 6 пересечения на предопределенное расстояние в направлении, противоположном направлению перемещения транспортных средств, перемещающихся по второй полосе 3 движения перемещения), и другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления, считается, что существует вероятность того, что другое транспортное средство 4а уступит путь другому мобильному субъекту (например, транспортному средству, мотоциклу, велосипеду или пешеходу), выходящему из пересекающего проезда 5. Отметим, что в дальнейшем расположение перед позицией в каждой из первой полосы 2 движения перемещения и второй полосы 3 движения перемещения означает расположение на передней стороне позиции в направлении, противоположном направлению перемещения транспортного средства, перемещающегося по полосе движения. Напротив, когда другое транспортное средство 4а находится в пределах предопределенного диапазона R1 перед позицией 6 пересечения, а другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления, считается, что не присутствует никакой другой мобильный субъект, выходящий из пересекающего проезда 5.
[0019]
Следовательно, когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1 перед позицией 6 пересечения, контроллер 18 прогнозирует, что существует вероятность того, что, как показано стрелкой 9, транспортное средство 8а (которое является другим мобильным субъектом) входит (въезжает) на первую полосу 2 движения перемещения из пересекающего проезда 5. И наоборот, когда другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления в предопределенном диапазоне R1, контроллер 18 прогнозирует, что нет вероятности того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Эта конфигурация позволяет контроллеру 18 прогнозировать присутствие или отсутствие другого мобильного субъекта, выходящего (выезжающего) из пересекающего проезда 5, на основе поведения другого транспортного средства 4а, даже если пересекающий проезд 5 скрыт в слепой зоне 7 еще одного транспортного средства 4b на второй полосе 3 движения перемещения.
Обратите внимание, что предполагается, что позиция 6 пересечения является ближайшей позицией к предопределенному диапазону R1 в пределах входа пересекающего проезда 5 на вторую полосу 3 движения перемещения, и состояние, в котором другое транспортное средство 4а находится в предопределенном диапазоне R1, является состоянием, в котором любая часть кузова другого транспортного средства 4а не выходит за пределы предопределенного диапазона R1. Другими словами, когда часть кузова другого транспортного средства 4а занимает часть входа пересекающего проезда 5 на вторую полосу 3 движения перемещения на стороне входа позиции 6 пересечения, контроллер 18 определяет, что другое транспортное средство 4а блокирует путь другого мобильного субъекта (транспортного средства 8а), который должен войти на вторую полосу 3 движения перемещения из пересекающего проезда 5, и другое транспортное средство 4а не уступает путь другому мобильному субъекту, выходящему из пересекающего проезда 5. Однако позиция 6 пересечения является позицией, служащей ориентиром для определения того, блокирует ли кузов другого транспортного средства 4а путь мобильного субъекта (транспортного средства 8а), который должен войти на вторую полосу 3 движения перемещения из пересекающего проезда 5 как описано выше, и, когда ширина дороги пересекающего проезда 5 достаточно широка, существует случай, когда кузов другого транспортного средства 4а не блокирует путь мобильного субъекта (транспортного средства 8а), даже если кузов другого транспортного средства 4а до некоторой степени занимает часть входа пересекающего проезда 5 на вторую полосу 3 движения перемещения на стороне входа в позицию 6 пересечения. Следовательно, позиция 6 пересечения не обязательно должна быть точно позицией, наиболее близкой к предопределенному диапазону в пределах входа пересекающего проезда 5 на вторую полосу 3 движения перемещения, и может быть установлена в позиции, расположенной на предопределенном расстоянии внутрь входа от пересекающего проезда 5 от позиции, ближайшей к предопределенному диапазону в пределах входа пересекающего проезда 5 на вторую полосу 3 движения до такой степени, чтобы не блокировать путь мобильного субъекта, который должен войти на вторую полосу 3 движения перемещения из пересекающего проезда 5.
[0020]
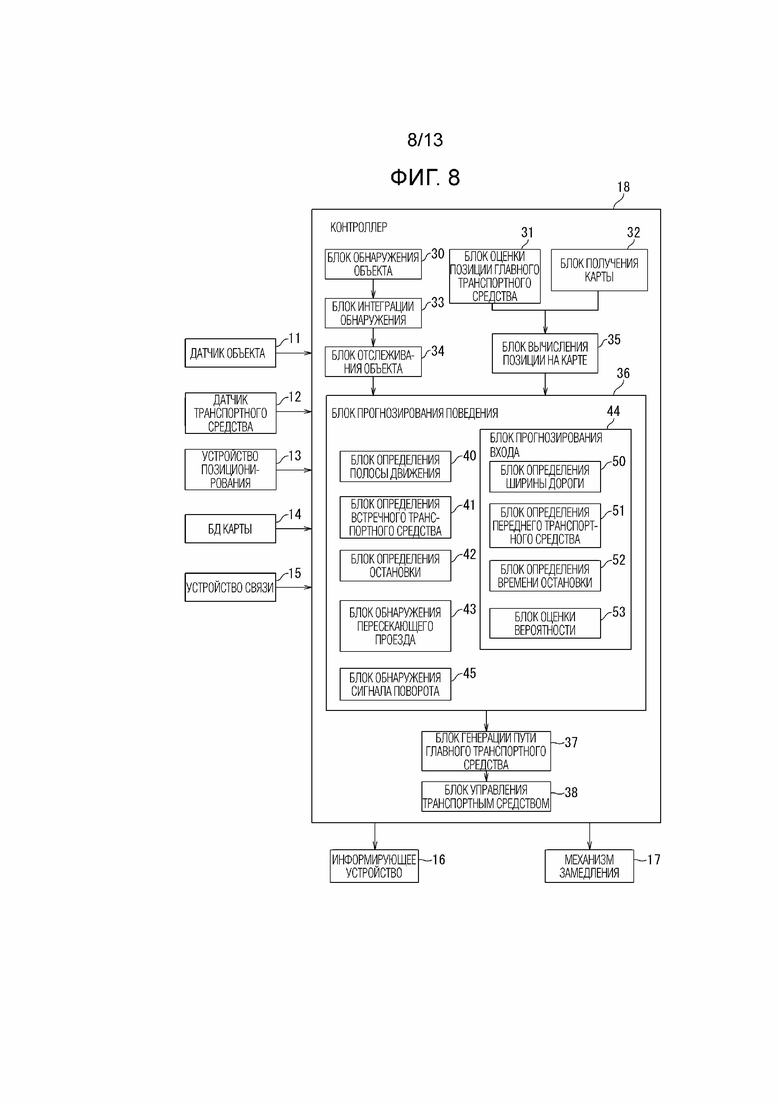
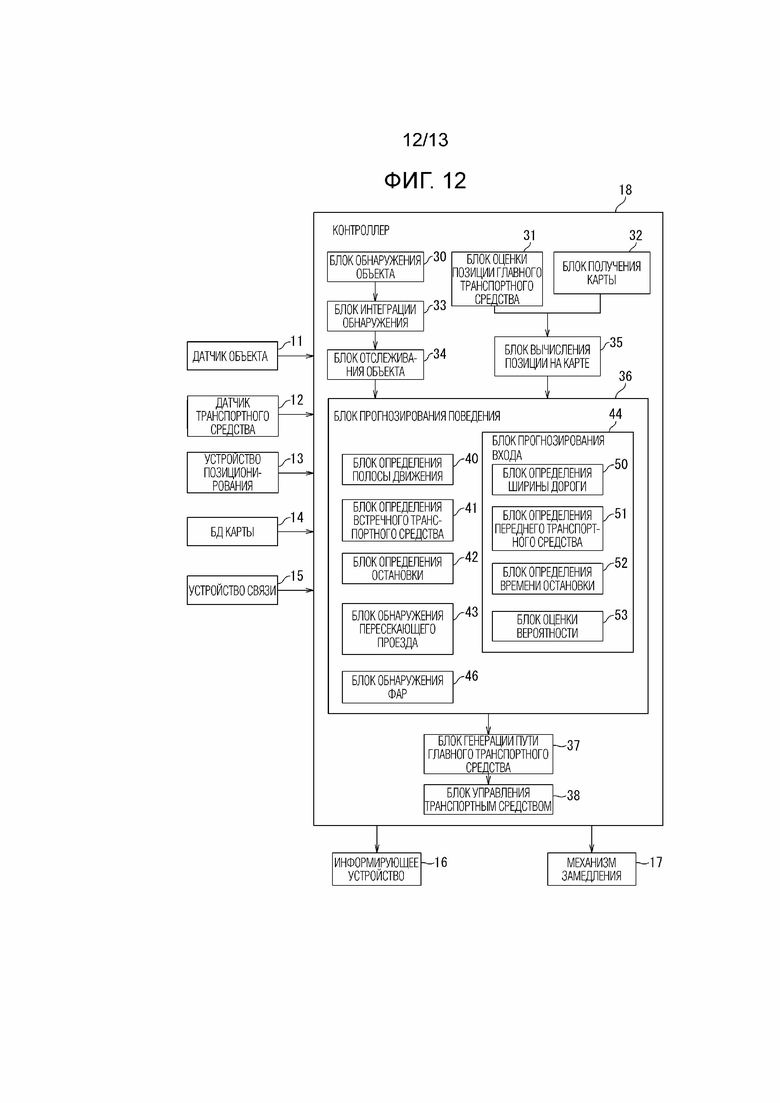
Со ссылкой на фиг. 3 будут подробно описаны функции контроллера 18. Контроллер 18 включает в себя блок 30 обнаружения объекта, блок 31 оценки позиции главного транспортного средства, блок 32 получения карты, блок 33 интеграции обнаружения, блок 34 отслеживания объекта, блок 35 вычисления позиции на карте, блок 36 прогнозирования поведения, блок 37 генерации пути главного транспортного средства и блок 38 управления транспортным средством.
Блок 30 обнаружения объекта обнаруживает позицию, угловое положение, размер, скорость и т.п. объекта, такого как транспортное средство, мотоцикл, пешеход и препятствие, вокруг главного транспортного средства 1, с главным транспортным средством 1 в качестве опорного, на основе сигналов обнаружения от датчиков объекта 11. Блок 30 обнаружения объекта выводит результат обнаружения двумерной позиции, углового положения, размера, скорости и т.п. объекта, представленного, например, в зенитном виде (также называемом видом сверху), который представляет собой вид главного транспортного средства 1 с воздуха.
[0021]
Блок 31 оценки позиции главного транспортного средства измеряет абсолютную позицию главного транспортного средства 1, то есть позицию, угловое положение и скорость главного транспортного средства 1 относительно предопределенной опорной точки, на основе результата измерения, полученного с помощью устройства 13 позиционирования и одометрии с использованием результатов обнаружения от датчиков 12 транспортного средства.
Блок 32 получения карты получает информацию карты, которая указывает структуру дороги, по которой перемещается главное транспортное средство 1, из базы данных 14 карт. Блок 32 получения карты может получать информацию карты от внешнего сервера картографических данных через устройство 15 связи.
[0022]
Блок 33 интеграции обнаружения интегрирует множество результатов обнаружения, которые блок 30 обнаружения объекта получил, соответственно, от множества датчиков обнаружения объекта, и выводит один результат обнаружения в отношении каждого объекта.
В частности, блок 33 интеграции обнаружения вычисляет, исходя из поведения объекта, полученного от соответствующих датчиков обнаружения объекта, наиболее разумное поведение объекта, которое минимизирует ошибку с учетом характеристик ошибок и т.п. соответствующих датчиков обнаружения объекта.
В частности, блок 33 интеграции обнаружения всесторонне оценивает результаты обнаружения, полученные от множества типов датчиков, с использованием известной технологии объединения датчиков и, таким образом, получает более точный результат обнаружения.
[0023]
Блок 34 отслеживания объекта отслеживает объект, обнаруженный блоком 30 обнаружения объекта. В частности, блок 34 отслеживания объекта выполняет проверку идентичности (ассоциации) среди объектов, обнаруженных в разные моменты времени, исходя из поведения объекта, выводимого в разные моменты времени, на основе результатов обнаружения, интегрированных блоком 33 интеграции обнаружения, и, на основе ассоциации, прогнозирует поведение объекта, например, скорость объекта.
[0024]
Блок 35 вычисления позиции на карте оценивает позицию и угловое положение (ориентацию) главного транспортного средства 1 на карте из абсолютной позиции главного транспортного средства 1, которая получена блоком 31 оценки позиции главного транспортного средства, и информации карты, которая получена блоком 32 получения карты. Кроме того, блок 35 вычисления позиции на карте идентифицирует дорогу, по которой перемещается главное транспортное средство 1, а также полосу движения, по которой главное транспортное средство 1 перемещается в пределах идентифицированной дороги.
[0025]
Блок 36 прогнозирования поведения прогнозирует поведение другого объекта вокруг главного транспортного средства 1 на основе результатов обнаружения, полученных блоком 33 интеграции обнаружения и блоком 34 отслеживания объекта, и позиции главного транспортного средства 1, идентифицированного посредством блока 35 вычисления позиции на карте.
Дополнительно, блок 36 прогнозирования поведения прогнозирует, существует ли вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения, которая является полосой движения, по которой перемещается главное транспортное средство, из пересекающего проезда 5, пересекающего вторую полосу 3 движения перемещения, которая является полосой движения, противоположной полосе движения перемещения главного транспортного средства 1, в позиции впереди главного транспортного средства 1.
[0026]
Блок 36 прогнозирования поведения включает в себя блок 40 определения полосы движения, блок 41 определения встречного транспортного средства, блок 42 определения остановки, блок 43 определения пересекающего проезда и блок 44 прогнозирования входа.
Блок 40 определения полосы движения прогнозирует позицию на карте и угловое положение другого транспортного средства вокруг главного транспортного средства 1 на основе результатов обнаружения, полученных блоком 33 интеграции обнаружения и блоком 34 отслеживания объекта, и позиции главного транспортного средства 1, идентифицированной блоком 35 вычисления позиции на карте 35. Блок 40 определения полосы движения определяет, какой полосе движения на карте принадлежит другое транспортное средство.
Блок 41 определения встречного транспортного средства определяет, является ли другое транспортное средство вокруг главного транспортного средства 1 встречным транспортным средством, присутствующим на второй полосе 3 движения перемещения, которая является полосой движения, противоположной первой полосе движения перемещения, по которой перемещается главное транспортное средство 1. На основе этого определения блок 41 определения встречного транспортного средства определяет, является ли другое транспортное средство 4а вокруг главного транспортного средства 1 встречным транспортным средством, присутствующим на второй полосе 3 движения перемещения.
[0027]
Блок 42 определения остановки определяет, находится ли другое транспортное средство 4а в состоянии остановки или в состоянии замедления, когда другое транспортное средство 4а является встречным транспортным средством. В описании настоящего изобретения «состояние остановки» включает в себя, в дополнение к случаю, когда скорость транспортного средства равна 0, состояние, в котором скорость транспортного средства равна или меньше предопределенной скорости транспортного средства, которая по существу равна 0.
Блок 43 обнаружения пересекающего проезда обнаруживает пересекающий проезд 5, который пересекает вторую полосу 3 движения перемещения в позиции перед главным транспортным средством 1, на основе информации карты.
[0028]
Дополнительно, блок 43 обнаружения пересекающего проезда определяет, находится ли позиция другого транспортного средства 4а, которое находится в состоянии остановки или состоянии замедления, в пределах предопределенного диапазона R1, расположенного перед позицией 6 пересечения, в котором пересекающий проезд 5 и вторая полоса 3 движения перемещения пересекаются друг с другом (то есть в предопределенном диапазоне от позиции 6 пересечения до точки, удаленной от позиции 6 пересечения на предопределенное расстояние в направлении, противоположном направлению движения второй полосы 3 движения перемещения).
[0029]
Блок 44 прогнозирования входа определяет, существует ли вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Когда другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления в предопределенном диапазоне R1, блок 44 прогнозирования входа прогнозирует, что нет вероятности того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
С другой стороны, когда позиция другого транспортного средства 4а, которое находится в состоянии остановки или в состоянии замедления, находится в пределах предопределенного диапазона R1, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
[0030]
Например, когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления перед пересекающим проездом 5, считается, что другое транспортное средство 4а уступает путь транспортному средству 8а, которое должно выйти из пересекающего проезда 5.
Например, когда другое транспортное средство 4а повернуло приблизительно на 90 градусов и изменило свое угловое положение при въезде в пересекающий проезд 5, считается, что высока вероятность того, что пешеход пересекает пересекающий проезд 5 или другое транспортное средство 4а не может войти в пересекающий проезд 5, поскольку пересекающий проезд 5 перегружен. Однако, когда другое транспортное средство 4а, не совершая большого поворота, останавливается, оставляя вход в пересекающий проезд 5 открытым у входа в пересекающий проезд 5, считается, что существует вероятность того, что транспортное средство 8а должно выехать из пересекающего проезда 5 и другое транспортное средство 4а уступает путь транспортному средству 8а.
[0031]
В такой ситуации водитель транспортного средства 8а, которому другое транспортное средство 4а уступает путь, иногда с учетом того, что предпочтительнее немедленно выехать из пересекающего проезда 5 и тем самым позволить другому транспортному средству 4а вскоре быть вновь заведенным, заставляет транспортное средство 8а выезжать из пересекающего проезда 5 быстрым движением. Когда транспортное средство 8а перемещается по полосе 2 движения перемещения, по которой главное транспортное средство 1 перемещается с таким быстрым движением, существует вероятность того, что главное транспортное средство 1 и транспортное средство 8а приближаются друг к другу больше, чем предполагалось, и, в этом случае, главное транспортное средство 1 и транспортное средство 8а должны быстро замедляться.
Блок 44 прогнозирования входа, заранее прогнозирующий такую ситуацию, позволяет главному транспортному средству 1 замедляться и двигаться медленнее перед пересекающим проездом 5 и избегать быстрого замедления.
[0032]
Обратите внимание, что, когда определено, что пересекающий проезд 5 является второстепенной дорогой или выездом из частной собственности, блок 44 прогнозирования входа может определить, существует ли вероятность того, что транспортное средство 8а войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 как мобильный субъект.
Дополнительно, когда определено, что пересекающий проезд 5 является пешеходным переходом, блок 44 прогнозирования входа может определить, существует ли вероятность того, что пешеход войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 в качестве мобильного субъекта. Когда пересекающий проезд 5 не является второстепенной дорогой, выездом из частной собственности или пешеходным переходом, блок 44 прогнозирования входа может определить, что нет вероятности того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
[0033]
Кроме того, блок 44 прогнозирования входа может определить, скрыт ли пересекающий проезд 5 в слепой зоне 7 при просмотре с главного транспортного средства 1, и прогнозировать, существует ли вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 только тогда, когда блок 44 прогнозирования входа определяет, что пересекающий проезд 5 скрыт в слепой зоне 7. Обратите внимание, что, как используется здесь, слепая зона 7 означает слепую зону, если смотреть со стороны водителя главного транспортного средства 1, или слепую зону для датчиков 11 объекта, которые обнаруживают объект вокруг главного транспортного средства 1.
[0034]
Блок 44 прогнозирования входа включает в себя блок 50 определения ширины дороги, блок 51 определения переднего транспортного средства, блок 52 определения времени остановки и блок 53 оценки вероятности.
Блок 50 определения ширины дороги определяет, меньше ли ширина W дороги пересекающего проезда 5 (см. Фиг. 2), чем предопределенное значение. Блок 50 определения ширины дороги может получать информацию о ширине W дороги из блока 32 получения карты. Предопределенное значение устанавливается, например, на ширину, при которой два транспортного средства могут проезжать друг друга без конкретного внимания.
[0035]
Блок 53 оценки вероятности оценивает, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, высока, когда ширина W дороги пересекающего проезда 5 меньше предопределенного значения.
Это связано с тем, что, когда ширина W дороги пересекающего проезда 5 меньше, чем описанное выше предопределенное значение, водитель другого транспортного средства 4а, проезжающего мимо транспортного средства 8а, несет психологическую и техническую нагрузку. Следовательно, считается, что водитель другого транспортного средства 4а предпочитает сначала позволить транспортному средству 8а выехать из пересекающего проезда 5, а не проехать транспортное средство 8а в пересекающем проезде 5, и вероятность того, что другое транспортное средство 4а уступит путь транспортному средству 8а увеличивается.
[0036]
Блок 51 определения переднего транспортного средства определяет, присутствует ли другое транспортное средство в диапазоне R2 предопределенного расстояния впереди главного транспортного средства 1 в первой полосе 2 движения перемещения (см. Фиг. 2). Диапазон R2 может быть диапазоном, расположенным впереди и вдали от главного транспортного средства 1, как показано на фиг. 2, или диапазоном от точки, расположенной впереди от позиции главного транспортного средства 1 на предопределенном расстоянии до позиции главного транспортного средства 1.
Блок 53 оценки вероятности оценивает, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, высока, когда определено, что нет другого транспортного средства в диапазоне R2 предопределенного расстояния впереди главного транспортного средства 1.
Это связано с тем, что, когда другое транспортное средство находится впереди главного транспортного средства 1 на первой полосе 2 движения перемещения, вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, уменьшается, и, наоборот, когда никакое другое транспортное средство не находится впереди главного транспортного средства 1, мобильный субъект может легко выезжать на первую полосу 2 движения перемещения из пересекающего проезда 5.
[0037]
Блок 52 определения времени остановки определяет время, прошедшее с момента времени, в который другое транспортное средство 4а остановилось, или момента времени, в который наблюдалась остановка другого транспортного средства 4а, как время остановки другого транспортного средства 4а. Блок 52 определения времени остановки определяет, действительно ли время остановки другого транспортного средства 4а равно или больше предопределенного времени.
Когда блок 52 определения времени остановки определяет, что время остановки другого транспортного средства 4а равно или больше предопределенного времени, блок 53 оценки вероятности прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда, является низкой. Это потому, что считается, что, когда время остановки велико, другое транспортное средство 4а останавливается по какой-либо причине, отличной от причины мобильного субъекта, которое должно выйти из пересекающего проезда 5.
[0038]
Как описано выше, блок 53 оценки вероятности оценивает величину вероятности того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда, на основе результатов определения, выполненного блоком 50 определения ширины дороги, блоком 51 определения переднего транспортного средства и блоком 52 определения времени остановки.
Например, блок 53 оценки вероятности может оценивать вероятность Ра того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда, на основе следующей формулы (1).
[0039]

В этой формуле Pr - базовая вероятность (константа), Aw, Af и As - положительные коэффициенты, a Xw, Xf и Xs - переменные, представляющие результаты определения блоком 50 определения ширины дороги, блоком 51 определения переднего транспортного средства и блоком 52 определения времени остановки соответственно.
Например, значение Xw равно «1», когда ширина W дороги пересекающего проезда 5 меньше, чем предопределенное значение, и «0», когда ширина дороги W пересекающего проезда 5 равна или больше предопределенного значения. Значение Xf равно «1», когда в диапазоне R2 на предопределенном расстоянии впереди главного транспортного средства 1 нет другого транспортного средства, и «0», когда другое транспортное средство присутствует в диапазоне R2. Значение Xs равно «1», когда время остановки другого транспортного средства 4а равно или больше предопределенного времени, и «0», когда время остановки другого транспортного средства 4а меньше предопределенного времени.
[0040]
Блок 37 генерации пути главного транспортного средства генерирует плавную целевую траекторию перемещения и профиль скорости, в соответствии с которыми главное транспортное средство 1 может перемещаться, не сталкиваясь с другим объектом, и выполнять быстрое замедление или быстрое рулевое управление, вызванное поведением другого объекта при соблюдении правил дорожного движения (например, главное транспортное средство 1 должно двигаться по первой полосе 2 движения перемещения) на основе результата прогнозирования поведения других объектов вокруг главного транспортного средства 1, предсказанного блоком 3 6 прогнозирования поведения.
[0041]
Когда блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, блок 37 генерации пути главного транспортного средства заранее генерирует профиль скорости, который замедляет или останавливает главное транспортное средство 1, и целевую траекторию движения, которая удерживает позицию главного транспортного средства 1 на удалении от противоположной полосы движения.
Например, когда вероятность Ра того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, равна или превышает пороговое значение, блок 37 генерации пути главного транспортного средства генерирует профиль скорости, который замедляет или останавливает главное транспортное средство 1 заранее, и целевую траекторию движения, которая удерживает латеральное положение главного транспортного средства 1 на удалении от второй полосы 3 движения перемещения.
[0042]
Блок 38 управления транспортным средством выполняет управление перемещением главного транспортного средства 1 посредством приведения в действие механизма 17 замедления, устройства ускорения и устройства рулевого управления на основе целевой траектории перемещения и профиля скорости, сгенерированного блоком 37 генерации пути главного транспортного средства.
Эта конфигурация позволяет блоку 38 управления транспортным средством оперировать механизмом 17 замедления и тем самым замедлять главное транспортное средство 1, когда блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 (или когда вероятность Ра равна или превышает пороговое значение).
[0043]
Отметим, что управление перемещением, выполняемое блоком 38 управления транспортным средством, не обязательно требует целевой траектории движения и профиля скорости. Например, можно выполнять управление торможением, управление ускорением и управление рулевым управлением на основе относительного расстояния между главным транспортным средством 1 и объектом (например, препятствием) вокруг главного транспортного средства 1.
[0044]
Когда блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 (или когда вероятность Ра равна или превышает пороговое значение), блок 36 прогнозирования поведения может оперировать устройством 16 информирования и тем самым информировать пассажира главного транспортного средства 1 о тревоге.
В этом случае устройство 16 информирования может выводить, например, звуковое сообщение или визуальное сообщение, предоставляющее информацию, указывающую, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
[0045]
(Оперирование)
Далее будет описан пример оперирования устройства 10 помощи при перемещении в настоящем варианте осуществления со ссылкой на фиг. 4.
На этапе S1 блок 30 обнаружения объекта определяет позицию, угловое положение, размер, скорость и т.п. объекта вокруг главного транспортного средства 1, используя множество датчиков обнаружения объекта.
На этапе S2 блок 33 интеграции обнаружения интегрирует множество результатов обнаружения, соответственно полученных от множества датчиков обнаружения объектов, и выводит один результат обнаружения в отношении каждого объекта. Блок 34 отслеживания объектов отслеживает соответствующие объекты, которые были обнаружены и результаты обнаружения которых были интегрированы, и прогнозирует позицию и поведение по отношению к главному транспортному средству 1 каждого объекта вокруг главного транспортного средства 1.
[0046]
На этапе S3 блок 31 оценки позиции главного транспортного средства измеряет позицию, угловое положение и скорость главного транспортного средства 1 относительно предопределенной опорной точки на основе результата измерения устройством 13 позиционирования и одометрии с использованием результатов обнаружения от датчиков 12 транспортного средства.
На этапе S4 блок 32 получения карты получает информацию карты, которая указывает структуру дороги, по которой перемещается главное транспортное средство 1.
На этапе S5 блок 35 вычисления позиции на карте оценивает позицию и угловое положение главного транспортного средства 1 на карте из позиции главного транспортного средства 1, измеренной на этапе S3, и данных карты, полученных на этапе S4.
[0047]
На этапе S6 блок 36 прогнозирования поведения прогнозирует позицию на карте и поведение другого транспортного средства вокруг главного транспортного средства 1 на основе результата обнаружения, полученного на этапе S2 (поведение объектов вокруг главного транспортного средства 1), и позиции главного транспортного средства 1, идентифицированной на этапе S5.
Блок 36 прогнозирования поведения прогнозирует, существует ли вероятность того, что мобильный субъект войдет на первую полосу 2 движения перемещения из пересекающего проезда 5. Процедура прогнозирования поведения мобильного субъекта для прогнозирования вероятности того, что мобильный субъект войдет на первую полосу 2 движения перемещения из пересекающего проезда 5, будет описана позже со ссылкой на фиг. 5 и 6.
[0048]
На этапе S7 блок 37 генерации пути главного транспортного средства генерирует целевую траекторию движения и профиль скорости главного транспортного средства 1 на основе поведения другого транспортного средства, прогнозированного на этапе S6.
Когда прогнозируется, что существует вероятность того, что другой мобильный субъект войдет на первую полосу 2 движения перемещения из пересекающего проезда 5 (или когда вероятность Ра равна или превышает пороговое значение), блок 37 генерации пути главного транспортного средства генерирует профиль скорости, который заранее замедляет или останавливает главное транспортное средство 1, и целевую траекторию перемещения, которая удерживает позицию главного транспортного средства 1 на удалении от противоположной полосы движения.
На этапе S8 блок 38 управления транспортным средством управляет главным транспортным средством 1 таким образом, что главное транспортное средство 1 перемещается в соответствии с целевой траекторией перемещения и профилем скорости, сгенерированным на этапе S7.
[0049]
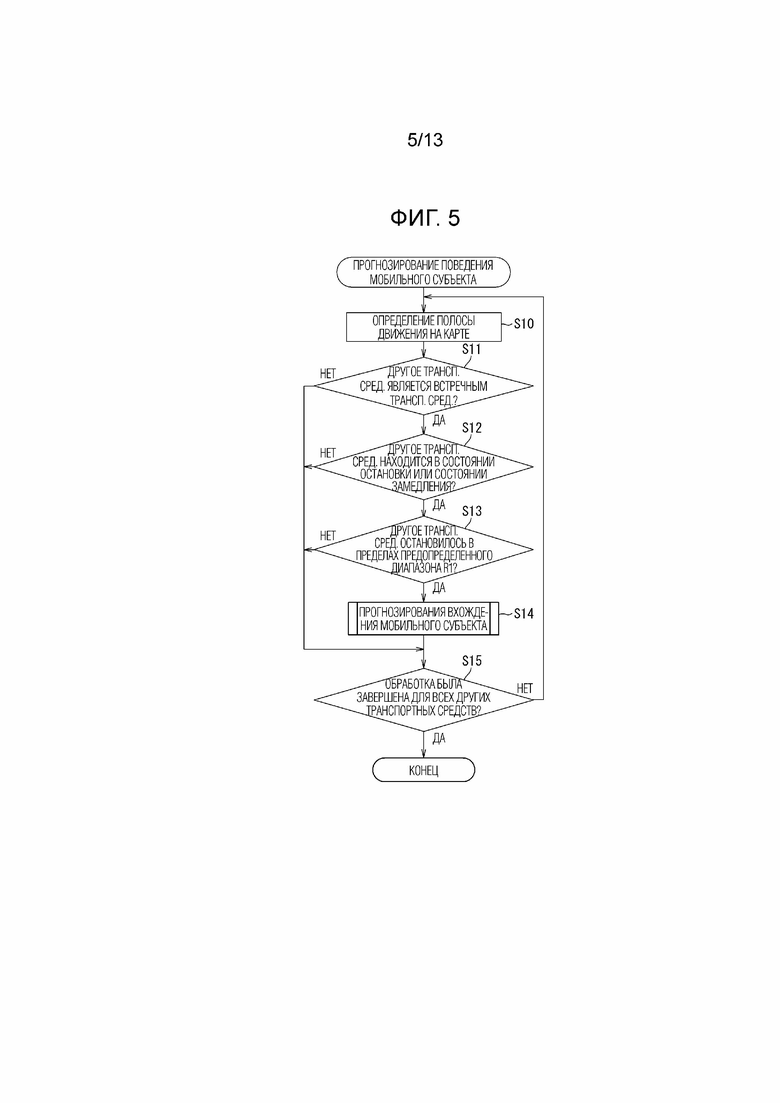
Процедура прогнозирования поведения мобильного субъекта на фиг. 4 будет описана со ссылкой на фиг. 5.
На этапе S10 блок 40 определения полосы движения определяет позицию на карте другого транспортного средства 4а вокруг главного транспортного средства 1 на основе результатов обнаружения, полученных блоком 33 интеграции обнаружения и блоком 34 отслеживания объекта, и позиции главного транспортного средства 1, идентифицированной блоком 35 вычисления позиции на карте, и определяет, к какой полосе движения на карте принадлежит другое транспортное средство 4а.
[0050]
На этапе S11 блок 41 определения встречного транспортного средства определяет, является или нет другое транспортное средство 4а вокруг главного транспортного средства 1 встречным транспортным средством на второй полосе 3 движения перемещения. Когда другое транспортное средство 4а является встречным транспортным средством (S11: Y) процесс переходит к этапу S12. Когда другое транспортное средство 4а не является встречным транспортным средством (S11: N), процесс переходит к этапу S15.
На этапе S12 блок 42 определения остановки определяет, находится ли другое транспортное средство 4а в состоянии остановки или в состоянии замедления. Когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления (S12: Y), процесс переходит к этапу S13. Когда другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления (S12: N), процесс переходит к этапу S15.
[0051]
На этапе S13 блок 43 обнаружения пересекающего проезда обнаруживает пересекающий проезд 5, который пересекает вторую полосу 3 движения перемещения в позиции перед главным транспортным средством 1. Блок 43 обнаружения пересекающего проезда обнаруживает, находится ли позиция другого транспортного средства 4а в пределах предопределенного диапазона R1, расположенного перед позицией 6 пересечения, в которой пересекающий проезд 5 и вторая полоса движения 3 перемещения пересекаются друг с другом. Когда позиция другого транспортного средства 4а находится в пределах предопределенного диапазона R1 (S13: Y), процесс переходит к этапу S14. Когда позиция другого транспортного средства 4а выходит за пределы предопределенного диапазона R1 (S13: N), процесс переходит к этапу S15.
[0052]
На этапе S14 блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5. Процедура прогнозирования входа мобильного субъекта, выполняемая блоком 44 прогнозирования входа, будет описана позже со ссылкой на фиг. 6.
На этапе S15 блок 36 прогнозирования поведения определяет, была ли выполнена обработка на этапах S10-S14 в отношении всех других транспортных средств вокруг главного транспортного средства 1. Когда обработка на этапах с S10 по S14 была выполнена в отношении всех других транспортных средств (S15: Y), процедура прогнозирования поведения мобильного субъекта завершается, и процесс переходит к этапу S7 на фиг. 4. Когда обработка на этапах с S10 по S14 не была выполнена в отношении одного из других транспортных средств (S15: N), другое транспортное средство, в отношении которого не выполнялась обработка, выбирается в качестве объекта обработки, и процесс возвращается к этапу S10.
[0053]
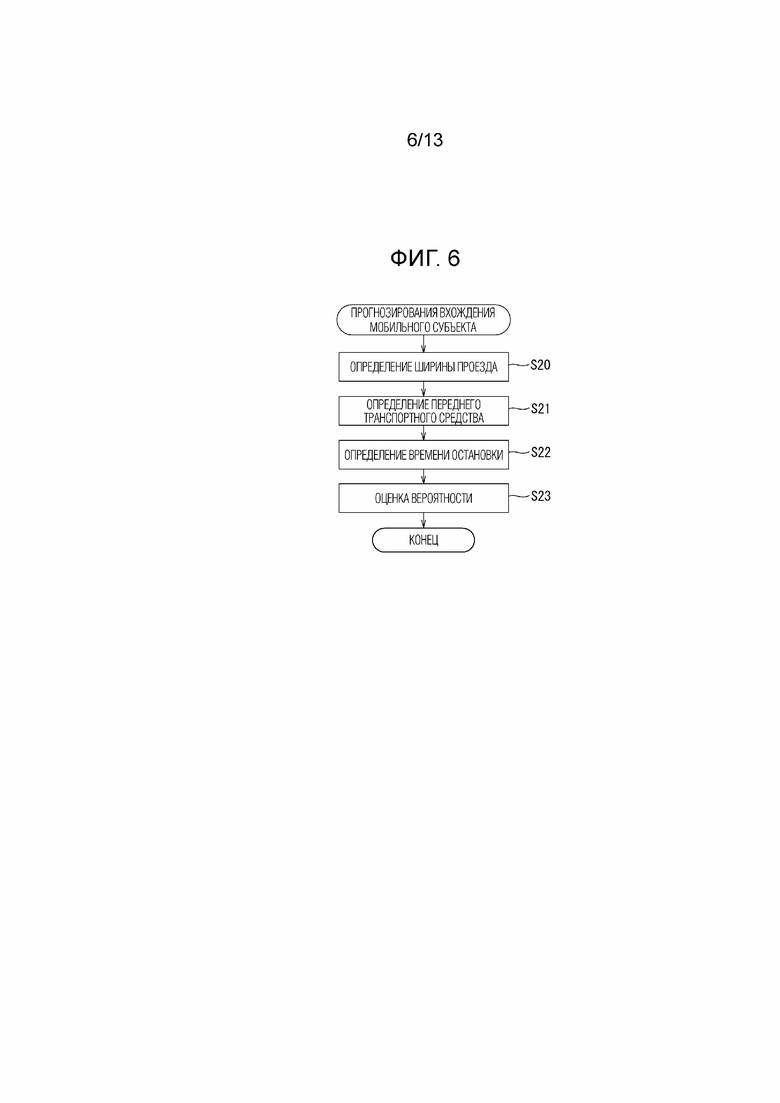
Процесс прогнозирования входа мобильного субъекта на фиг. 5 будет описан со ссылкой на фиг. 6.
На этапе S20 блок 50 определения ширины дороги определяет, меньше ли ширина W дороги пересекающего проезда 5 (см. Фиг. 2), чем предопределенное значение.
На этапе S21 блок 51 определения переднего транспортного средства определяет, присутствует ли другое транспортное средство в диапазоне R2 предопределенного расстояния впереди главного транспортного средства 1 на первой полосе 2 движения перемещения (см. Фиг. 2).
На этапе S22 блок 52 определения времени остановки определяет, действительно ли время остановки другого транспортного средства 4а равно или больше предопределенного времени.
[0054]
На этапе S23, когда ширина W дороги пересекающего проезда 5 меньше, чем предопределенное значение, блок 53 оценки вероятности оценивает, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, высока.
Когда блок 51 определения переднего транспортного средства определяет, что в диапазоне R2 предопределенного расстояния впереди главного транспортного средства 1 нет другого транспортного средства, блок 53 оценки вероятности оценивает, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 высокая.
Когда блок 52 определения времени остановки определяет, что время остановки другого транспортного средства 4а равно или больше предопределенного времени, блок 53 оценки вероятности прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу движения из пересекающего проезда, низкая.
Затем процесс возвращается к этапу S15 на фиг. 5.
[0055]
(Благоприятные эффекты первого варианта осуществления) (1) Блок 35 вычисления позиции на карте определяет позицию главного транспортного средства 1. Блок 40 определения полосы движения и блок 41 определения встречного транспортного средства определяют позицию другого транспортного средства 4а на второй полосе 3 движения перемещения, которая является полосой движения, противоположной первой полосе 2 движения перемещения, по которой перемещается главное транспортное средство 1. Блок 43 обнаружения пересекающего проезда обнаруживает пересекающий проезд 5, который пересекает вторую полосу 3 движения перемещения в позиции перед главным транспортным средством 1.
[0056]
Блок 43 обнаружения пересекающего проезда определяет, находится ли другое транспортное средство 4а в пределах предопределенного диапазона R1 от позиции 6 пересечения пересекающего проезда 5 и второй полосы 3 движения перемещения до точки, удаленной от позиции 6 пересечения на предопределенное расстояние, в направлении, противоположном направлению перемещения транспортных средств по второй полосе 3 движения перемещения. Блок 42 определения остановки определяет, находится ли другое транспортное средство 4а в состоянии остановки или в состоянии замедления.
Когда другое транспортное средство 4а находится в пределах предопределенного диапазона R1, а другое транспортное средство 4а находится либо в состоянии остановки, либо в состоянии замедления, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
[0057]
Прогнозирование того, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, как описано выше, позволяет заранее определить поведение уклонения и избежать ситуации, в которой мобильный субъект, входящий в первую полосу 2 движения перемещения из пересекающего проезда 5, и главное транспортное средство 1 приближаются друг к другу больше, чем необходимо, и мобильный субъект и главное транспортное средство 1 быстро замедляются.
Поскольку, когда другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления в предопределенном диапазоне R1 перед позицией 6 пересечения, можно прогнозировать, что не присутствует никакой другой мобильный субъект, выходящий (въезжающий) из пересекающего проезда 5, можно повысить точность прогнозирования вероятности того, что другой мобильный субъект войдет в полосу движения перемещения, по которой перемещается главное транспортное средство. Поскольку в результате можно уменьшить ненужное замедление, остановку и т.п., становится возможным, например, сгенерировать целевую траекторию перемещения и профиль скорости, позволяющие достичь высокой энергоэффективности при управлении автономным вождением.
[0058]
(2) Когда блок 44 прогнозирования входа определяет, что пересекающий проезд 5 скрыт в слепой зоне 7 при просмотре с главного транспортного средства, блок 44 прогнозирования входа прогнозирует, существует ли вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Эта конфигурация позволяет спрогнозировать, существует ли вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, на основе поведения другого транспортного средства 4а, даже если пересекающий проезд 5 скрыт в слепой зоне 7.
[0059]
(3) Когда блок 44 прогнозирования входа определяет, что пересекающий проезд 5 является пешеходным переходом, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Когда пересекающий проезд 5 представляет собой пешеходный переход, а мобильный субъект является пешеходом или велосипедом, пешеход или велосипед иногда пересекает первую полосу 2 движения перемещения несколько поспешно, когда другое транспортное средство 4а уступает путь пешеходу или велосипеду. Прогнозирование заранее вероятности входа пешехода или велосипеда на первую полосу 2 движения перемещения позволяет избежать ситуации, в которой главное транспортное средство 1 и пешеход или велосипед приближаются друг к другу больше, чем необходимо, и главное транспортное средство 1 и пешеход или велосипед быстро замедляются.
[0060]
(4) Когда блок 44 прогнозирования входа определяет, что пересекающий проезд 5 является второстепенной дорогой или выездом из частной собственности, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что транспортное средство 8а войдет в первую полосу 2 движения перемещения из пересекающего проезда 5 как мобильный субъект.
Когда пересекающий проезд 5 является второстепенной дорогой или выездом из частной собственности, а мобильный субъект является транспортным средством 8а, транспортное средство 8а иногда несколько поспешно входит в первую полосу 2 движения перемещения, когда другое транспортное средство 4а уступает путь транспортному средству 8а. Прогнозирование заранее вероятности того, что транспортное средство 8а выйдет на первую полосу 2 движения перемещения, позволяет избежать ситуации, в которой главное транспортное средство 1 и транспортное средство 8а приближаются друг к другу больше, чем необходимо, и главное транспортное средство 1 и транспортное средство 8а быстро замедляются.
[0061]
(5) Когда ширина W пересекающего проезда 5 меньше предопределенного значения, блок 53 оценки вероятности прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, высокая.
Когда ширина W пересекающего проезда 5 меньше предопределенного значения, вероятность того, что другое транспортное средство 4а уступит путь мобильному субъекту, чтобы избежать прохождения мобильного субъекта в пересекающемся проходе 5, увеличивается. Таким образом, можно более точно спрогнозировать, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения, высока, и главное транспортное средство 1 и мобильный субъект могут избежать приближения друг к другу больше, чем необходимо, и главное транспортное средство и мобильный субъект могут избежать быстрого замедления.
[0062]
(6) Когда определено, что в диапазоне R2 предопределенного расстояния перед основным транспортным средством 1 на первой полосе 2 движения перемещения нет другого транспортного средства, блок 53 оценки вероятности оценивает вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, высокая.
Это связано с тем, что, поскольку, когда нет транспортного средства и есть пространство впереди главного транспортного средства 1 на первой полосе 2 движения перемещения, мобильный субъект может легко выехать на первую полосу 2 движения перемещения, вероятность того, что другое транспортное средство 4а уступит путь мобильному субъекту увеличивается. Таким образом, можно более точно спрогнозировать, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения, высокая, и главное транспортное средство 1 и мобильный субъект могут избежать приближения друг к другу больше, чем необходимо, и главное транспортное средство и мобильный субъект могут избежать быстрого замедления.
[0063]
(7) Когда определено, что время остановки другого транспортного средства 4а равно или больше предопределенного времени, блок 53 оценки вероятности прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, низкая.
Считается, что, когда время остановки велико, другое транспортное средство 4а останавливается по какой-либо причине, отличной от причины мобильного субъекта, которое должна выйти из пересекающего проезда 5. В таком случае прогнозирование того, что вероятность того, что мобильный субъект входит в первую полосу 2 движения перемещения из пересекающего проезда 5, является низкой, позволяет повысить точность прогнозирования вероятности того, что другой мобильный субъект войдет в полосу движения перемещения, по которой перемещается главное транспортное средство. В результате можно уменьшить ненужное замедление, остановку и т.п.
[0064]
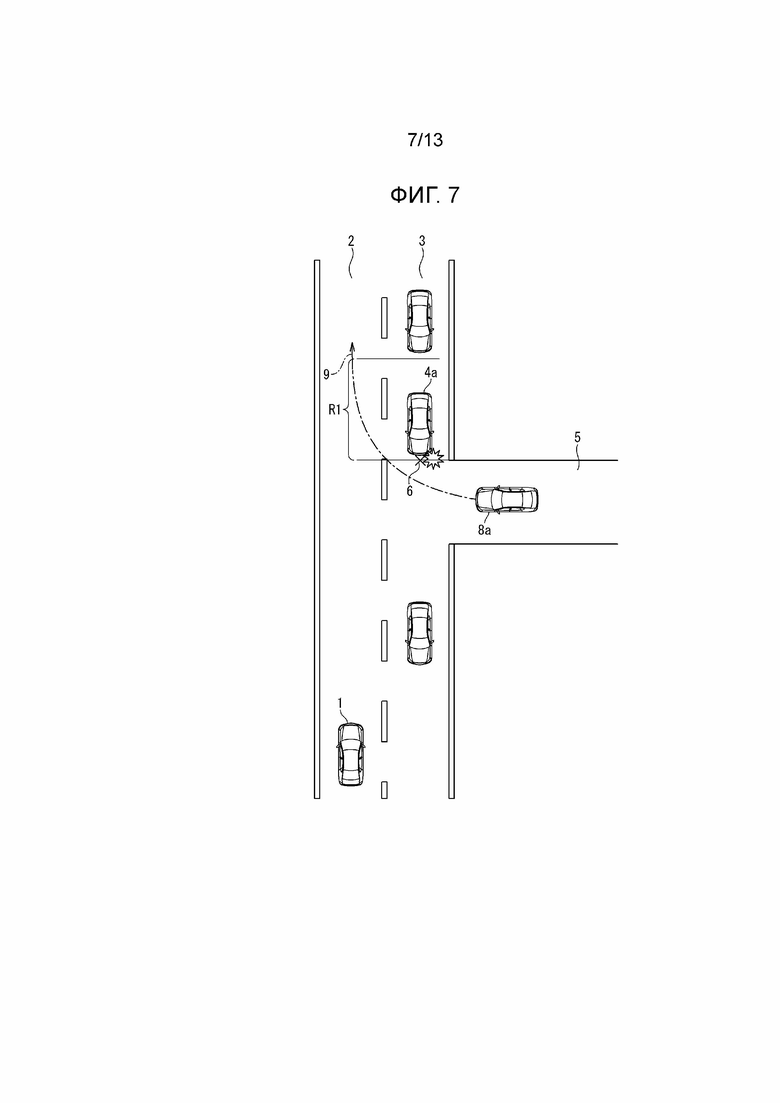
(Второй вариант осуществления)
ФИГ. 7 иллюстрирует ситуацию, в которой другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включило сигнал поворота, указывающий на намерение повернуть в пересекающий проезд 5. В таком случае считается, что другое транспортное средство 4а с намерением въехать в пересекающий проезд 5, находящееся в состоянии остановки или состоянии замедления перед пересекающим проездом 5, означает, что существует вероятность того, что объект, блокирующий въезд, присутствует в пересекающемся проходе 5, или другое транспортное средство 4а уступает путь другому мобильному субъекту, который должен выйти из пересекающего проезда 5.
[0065]
Таким образом, когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включило сигнал поворота, указывающий на намерение повернуть в пересекающий проезд 5 (то есть, когда сигнал поворота другого транспортного средства 4а указывает на намерение перейти к пересекающему проезду), блок 36 прогнозирования поведения прогнозирует, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Со ссылкой на ФИГ. 8. Контроллер 18 второго варианта осуществления имеет функциональную конфигурацию, такую же как функциональная конфигурация контроллера 18 первого варианта осуществления, и одинаковые ссылочные позиции присвоены одним и тем же составляющим элементам.
Блок 36 прогнозирования поведения включает в себя блок 45 обнаружения сигнала поворота.
[0066]
Блок 45 обнаружения сигнала поворота обнаруживает включение сигнала поворота, который указывает на намерение повернуть на пересекающий проезд 5, среди сигналов поворота другого транспортного средства 4а на второй полосе 3 движения перемещения. Обратите внимание, что блок 45 обнаружения сигнала поворота, например, включает в себя камеру для захвата изображения окружающей среды транспортного средства в качестве датчика 11 объекта и способен обнаруживать включение сигнала поворота, обнаруживая, что область, в которой мигает желтый свет (мигает сигнал поворота) присутствует на изображении, захваченном камерой. В качестве альтернативы, блок 45 обнаружения сигнала поворота может принимать сигнал, указывающий включение сигнала поворота от другого транспортного средства 4а посредством связи транспортное средство - транспортное средство или подобным образом, и, таким образом, обнаруживать включение сигнала поворота. Способ обнаружения включения сигнала поворота другого транспортного средства 4а конкретно не ограничивается.
Когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включило сигнал поворота, указывающий на намерение повернуть к пересекающему проезду 5, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что другой мобильный субъект выйдет на первую полосу 2 движения перемещения из пересекающего проезда 5.
[0067]
Например, когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включило сигнал поворота, указывающий на намерение повернуть в пересекающий проезд 5, считается, что другое транспортное средство 4а, которое должно въехать в пересекающий проезд 5, находится в состоянии остановки или в состоянии замедления перед пересекающим проездом 5 и уступает путь транспортному средству 8а, которое должно выйти из пересекающего проезда 5.
[0068]
Например, когда другое транспортное средство 4а повернулось приблизительно на 90 градусов и изменило свое угловое положение при въезде в пересекающий проезд 5, считается, что вероятность того, что пешеход пересекает пересекающий проезд 5 или другое транспортное средство 4а не может въехать в пересекающий проезд 5, поскольку пересекающий проезд 5 перегружен, является высокой. Однако, когда другое транспортное средство 4а, не совершая большого поворота, останавливается, оставляя вход в пересекающий проезд 5 открытым у входа в пересекающий проезд 5, считается, что существует вероятность того, что транспортное средство 8а должно выехать из пересекающего проезда 5, и другое транспортное средство 4а уступает путь к транспортному средству 8а.
[0069]
В такой ситуации водитель транспортного средства 8а, которому другое транспортное средство 4а уступает путь, иногда с учетом того, что предпочтительнее немедленно выехать из пересекающего проезда 5 и тем самым позволить другому транспортному средству 4а вскоре быть вновь заведенным, заставляет транспортное средство 8а выезжать из пересекающего проезда 5 быстрым перемещением. Когда транспортное средство 8а выезжает на полосу 2 движения перемещения, по которой главное транспортное средство 1 перемещается с таким быстрым движением, существует вероятность того, что главное транспортное средство 1 и транспортное средство 8а приближаются друг к другу больше, чем предполагалось, и в этом случае, главное транспортное средство 1 и транспортное средство 8а должны быстро замедляться.
Блок 44 прогнозирования входа, заранее прогнозирующий такую ситуацию, позволяет главному транспортному средству 1 замедляться и двигаться медленно перед пересекающимся проездом 5 и избегать быстрого замедления.
[0070]
С другой стороны, когда другое транспортное средство 4а не включило сигнал поворота, указывающий на намерение повернуть к пересекающемуся проходу 5, блок 44 прогнозирования входа прогнозирует, что нет вероятности того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Поскольку благодаря этой конфигурации можно прогнозировать, что никакой другой мобильный субъект, выходящий из пересекающего проезда 5, не присутствует, можно повысить точность прогнозирования вероятности того, что другой мобильный субъект войдет в полосу движения перемещения, по которой перемещается главное транспортное средство.
[0071]
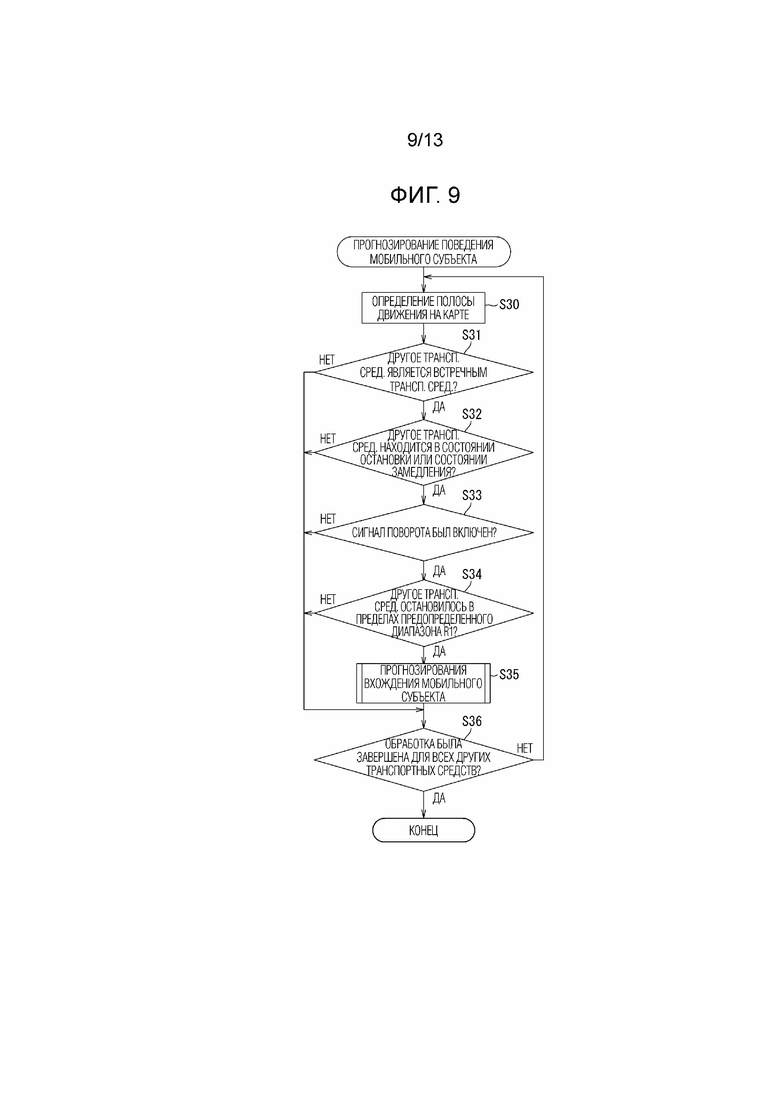
Процедура прогнозирования поведения мобильного субъекта второго варианта осуществления будет описана со ссылкой на фиг. 9. Обработка на этапах S30 и S31 такая же, как обработка на этапах S10 и S11 на фиг. 5.
На этапе S32 блок 42 определения остановки определяет, находится ли другое транспортное средство 4а в состоянии остановки или в состоянии замедления. Когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления (S32: Y), процесс переходит к этапу S33. Когда другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления (S32: N), процесс переходит к этапу S36.
[0072]
На этапе S33 блок 45 обнаружения сигнала поворота определяет, включило ли другое транспортное средство 4а на второй полосе 3 движения перемещения сигнал поворота, указывающий на намерение повернуть в пересекающий проезд 5. Когда другое транспортное средство 4а включило сигнал поворота, указывающий на намерение повернуть в пересекающий проезд 5 (этап S33: Y), процесс переходит к этапу S34. Когда другое транспортное средство 4а не включило сигнал поворота, указывающий на намерение повернуть в пересекающий проезд 5 (этап S33: N), процесс переходит к этапу S36.
Обработка на этапах S34-S36 такая же, как обработка на этапах S13-S15 на фиг. 5.
[0073]
(Благоприятные эффекты второго варианта осуществления) Когда определено, что сигнал поворота другого транспортного средства 4а указывает на намерение повернуть в пересекающий проезд 5, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Прогнозирование того, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, как описано выше, позволяет заранее определить поведение уклонения и избежать ситуации, в которой мобильный субъект, входящий в первую полосу 2 движения перемещения из пересекающего проезда 5, и главное транспортное средство 1 приближаются друг к другу больше, чем необходимо, и мобильный субъект и главное транспортное средство 1 быстро замедляются.
[0074]
Поскольку, когда другое транспортное средство 4а не включило сигнал поворота, указывающий на намерение повернуть к пересекающему проезду 5, можно прогнозировать, что никакой другой мобильный субъект, выходящий из пересекающего проезда 5, не присутствует, можно улучшить точность прогнозирования вероятности того, что другой мобильный субъект выйдет на полосу движения перемещения, по которой перемещается главное транспортное средство. Поскольку в результате можно уменьшить ненужное замедление, остановку и т.п., становится возможным, например, сгенерировать заданную траекторию перемещения и профиль скорости, позволяющие достичь высокой энергоэффективности при управлении автономным вождением..
[0075]
(Третий вариант осуществления)
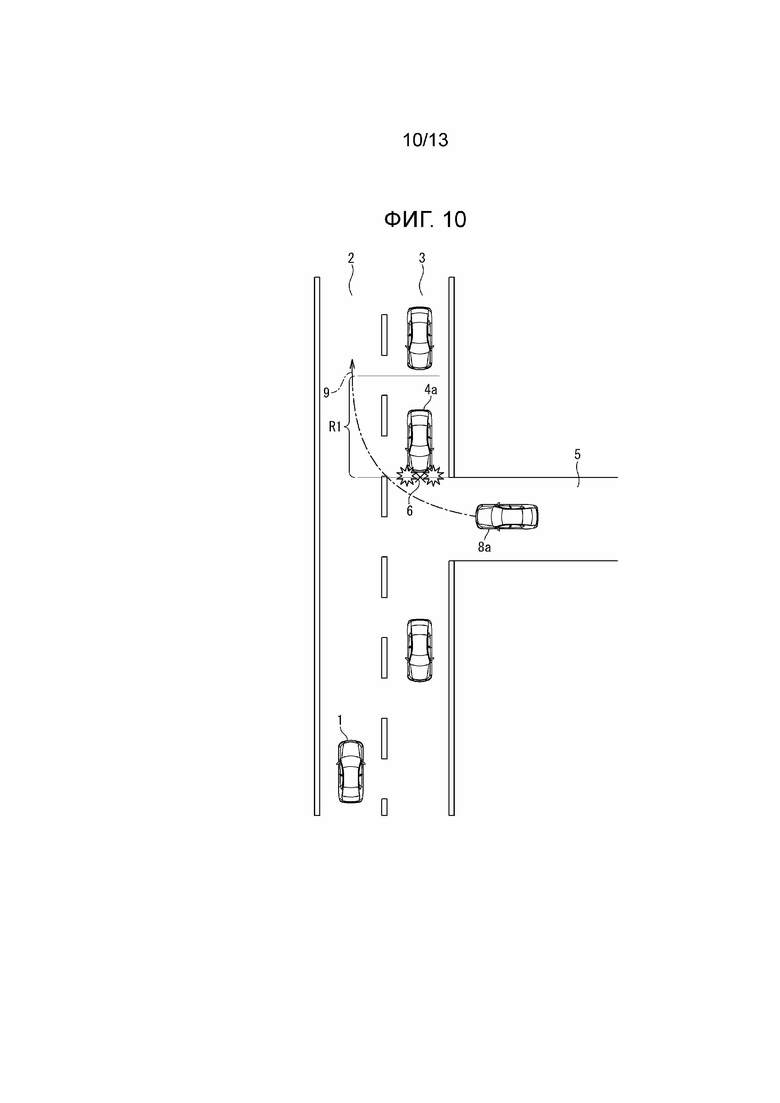
ФИГ. 10 иллюстрирует ситуацию, в которой другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включает и выключает фары или мигает фарами. Такое действие представляет собой намерение другого транспортного средства 4а уступить путь другому мобильному субъекту, и, когда, например, пересекающий проезд 5 является второстепенной дорогой или выездом из частной собственности, считается, что транспортное средство 8а, которое является мобильным субъектом, должно выйти из пересекающего проезда 5 и выйти на первую полосу 2 движения перемещения или вторую полосу 3 движения перемещения.
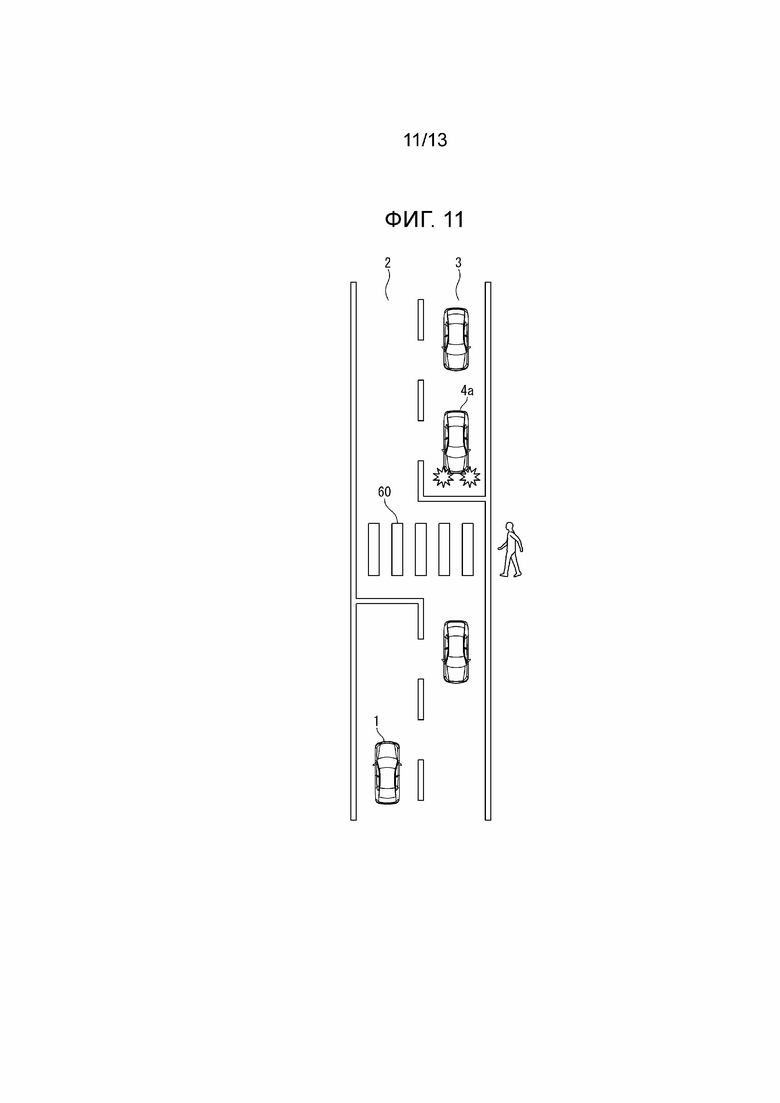
Кроме того, когда, например, пересекающий проезд 5 представляет собой пешеходный переход 60, который пересекает первую полосу 2 движения перемещения и вторую полосу 3 движения перемещения, как показано на фиг. 11, считается, что пешеход или велосипед (в дальнейшем именуемый «пешеход и т.п.»), который является мобильным субъектом, должен переходить пешеходный переход 60.
[0076]
Таким образом, когда блок 36 прогнозирования поведения обнаруживает, что другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включает и выключает фары (или мигает фарами), блок 36 прогнозирования поведения прогнозирует, что существует вероятность того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Со ссылкой на ФИГ. 12. Контроллер 18 третьего варианта осуществления имеет функциональную конфигурацию, такую же как функциональная конфигурация контроллера 18 первого варианта осуществления, и одинаковые ссылочные позиции присвоены одним и тем же составляющим элементам.
Блок 36 прогнозирования поведения включает в себя блок 46 обнаружения фар.
[0077]
Блок 46 обнаружения фар обнаруживает включение и выключение или мигание фар другого транспортного средства 4а. Обратите внимание, что блок 46 обнаружения фар, например, включает в себя камеру для захвата изображения окружающей среды транспортного средства в качестве датчика 11 объекта и способен обнаруживать включение и выключение или мигание фар, обнаруживая, что область, в которой яркость сильно меняется (мигание фар) присутствует на изображении, которое захватила камера. В качестве альтернативы, блок 46 обнаружения фар может принимать сигнал, указывающий включение и выключение или мигание фар от другого транспортного средства 4а посредством связи транспортное средство - транспортное средство или т.п., и, таким образом, обнаруживать включение и выключение или мигание фар. Способ обнаружения включения и выключения или мигания фар другого транспортного средства 4а конкретно не ограничивается.
Когда другое транспортное средство 4а находится в состоянии остановки или состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включает и выключает или мигает фарами, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что другой мобильный субъект выезжает на первую полосу 2 движения перемещения из пересекающего проезда 5.
Например, когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления в предопределенном диапазоне R1, расположенном перед позицией 6 пересечения, и включает и выключает или мигает фарами, считается, что, как описано выше, транспортное средство 8а должно выехать на первую полосу 2 движения перемещения, пешеход и т.п. - пересекать пешеходный переход 60.
[0078]
В такой ситуации водитель транспортного средства 8а, пешеход или тому подобное, которому другое транспортное средство 4а уступает путь, иногда, учитывая, что предпочтительно позволить другому транспортному средству 4а быть вскоре вновь заведенным, выходит из пересекающего проезда 5 или пересекает пешеходный переход 60 быстрым перемещением. Когда транспортное средство 8а, пешеход или т.п. выходит на полосу 2 движения перемещения, по которой главное транспортное средство 1 перемещается с таким быстрым движением, существует вероятность того, что транспортное средство 8а, пешеход или т.п. и главное транспортное средство 1 приблизятся близко друг к другу больше, чем предполагалось, и в этом случае главное транспортное средство 1 и транспортное средство 8а или велосипед должны быстро замедляться.
Блок 44 прогнозирования входа, заранее прогнозирующий такую ситуацию, позволяет главному транспортному средству 1 замедляться и двигаться медленно перед пересекающимся проездом 5 и избегать быстрого замедления.
[0079]
С другой стороны, когда другое транспортное средство 4а не включает, не выключает и не мигает фарами, блок 44 прогнозирования входа прогнозирует, что нет вероятности того, что другой мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Поскольку благодаря этой конфигурации можно прогнозировать, что никакой другой мобильный субъект, выходящий из пересекающего проезда 5, не присутствует, можно повысить точность прогнозирования вероятности того, что другое мобильный субъект войдет в полосу движения перемещения, по которой перемещается главное транспортное средство.
[0080]
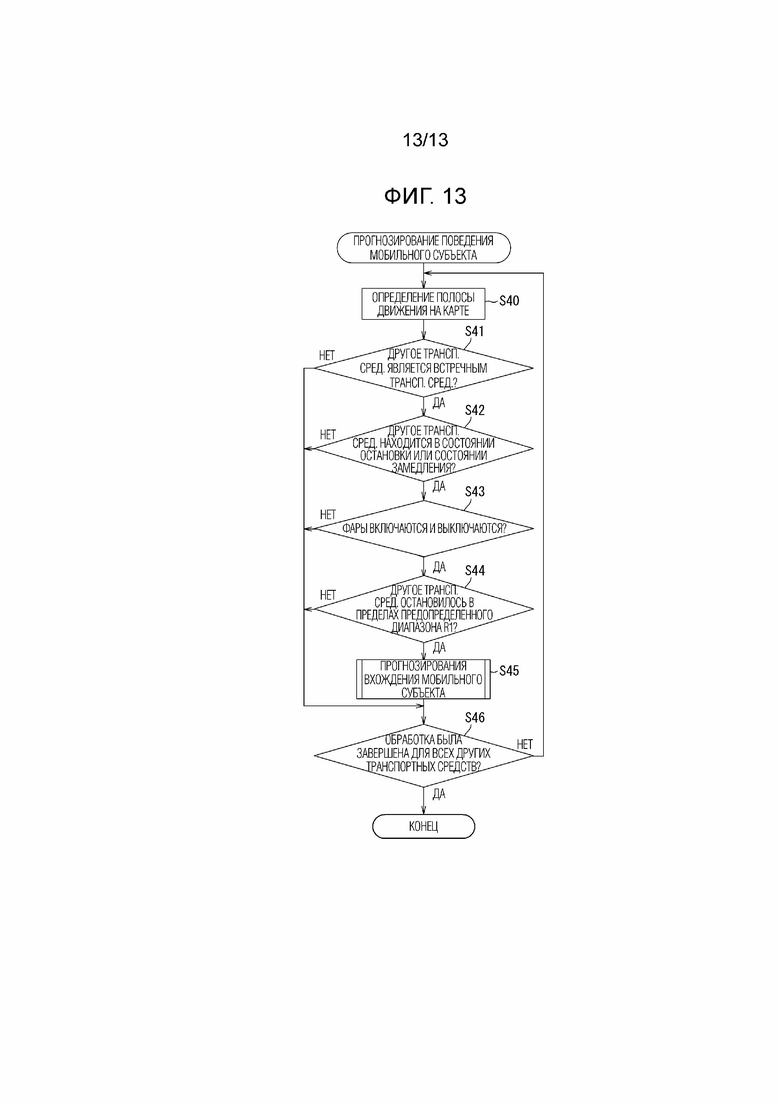
Процедура прогнозирования поведения мобильного субъекта третьего варианта осуществления будет описана со ссылкой на фиг. 13. Обработка на этапах S40 и S41 такая же, как обработка на этапах S10 и S11 на фиг. 5.
На этапе S42 блок 42 определения остановки определяет, находится ли другое транспортное средство 4а в состоянии остановки или в состоянии замедления. Когда другое транспортное средство 4а находится в состоянии остановки или в состоянии замедления (S42: Y), процесс переходит к этапу S43. Когда другое транспортное средство 4а не находится ни в состоянии остановки, ни в состоянии замедления (S42: N), процесс переходит к этапу S46.
[0081]
На этапе S43 блок 46 обнаружения фар определяет, включает ли или выключает другое транспортное средство 4а на второй полосе 3 движения перемещения фары или мигает ими. Когда другое транспортное средство 4а включает и выключает или мигает фарами (этап S43: Y) процесс переходит к этапу S44. Когда другое транспортное средство 4а не включает, не выключает и не мигает фарами (этап S43: N), процесс переходит к этапу S46.
Обработка на этапах S44-S46 такая же, как обработка на этапах S13-S15 на фиг. 5.
[0082]
(Благоприятные эффекты третьего варианта осуществления) Когда обнаруживается, что другое транспортное средство 4а включает и выключает или мигает фарами, блок 44 прогнозирования входа прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5.
Прогнозирование того, что существует вероятность того, что мобильный субъект войдет в первую полосу 2 движения перемещения из пересекающего проезда 5, как описано выше, позволяет заранее определить поведение уклонения и избежать ситуации, в которой мобильный субъект, входящий на первую полосу 2 движения перемещения из пересекающего проезда 5, и главное транспортное средство 1 приближаются друг к другу больше, чем необходимо, и мобильный субъект и главное транспортное средство 1 быстро замедляются.
[0083]
Поскольку, когда другое транспортное средство 4а не включает, не выключает и не мигает фарами, можно прогнозировать, что никакой другой мобильный субъект, выходящий из пересекающего проезда 5, не присутствует, можно повысить точность прогнозирования вероятности того, что другой мобильный субъект выходит на полосу движения перемещения, по которой перемещается главное транспортное средство. Поскольку в результате можно уменьшить ненужное замедление, остановку и т.п., становится возможным, например, сгенерировать целевую траекторию перемещения и профиль скорости, позволяющие достичь высокой энергоэффективности при управлении автономным вождением.
[0084]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или несколько вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0085]
Определяют позицию главного транспортного средства (1). Определяют позицию другого транспортного средства (4а) на второй противоположной полосе движения (3). Обнаруживают пересекающий проезд (5). Определяют, находится ли другое транспортное средство (4а) в пределах предопределенного диапазона (R1) от пересечения пересекающего проезда (5) и второй полосы движения (3). При этом другое транспортное средство (4a) находится либо в состоянии остановки, либо в состоянии замедления. Когда вышеуказанные условия соблюдены, прогнозируют, что существует вероятность того, что мобильный субъект (8a) продвинется и войдет в первую полосу движения (2) из пересекающего проезда (5). Предложены также устройство прогнозирования поведения для мобильного субъекта, транспортное средство. Достигается точность прогнозирования вероятности того, что другой мобильный субъект войдет на полосу движения, по которой перемещается главное транспортное средство. 3 н. и 7 з.п. ф-лы, 13 ил.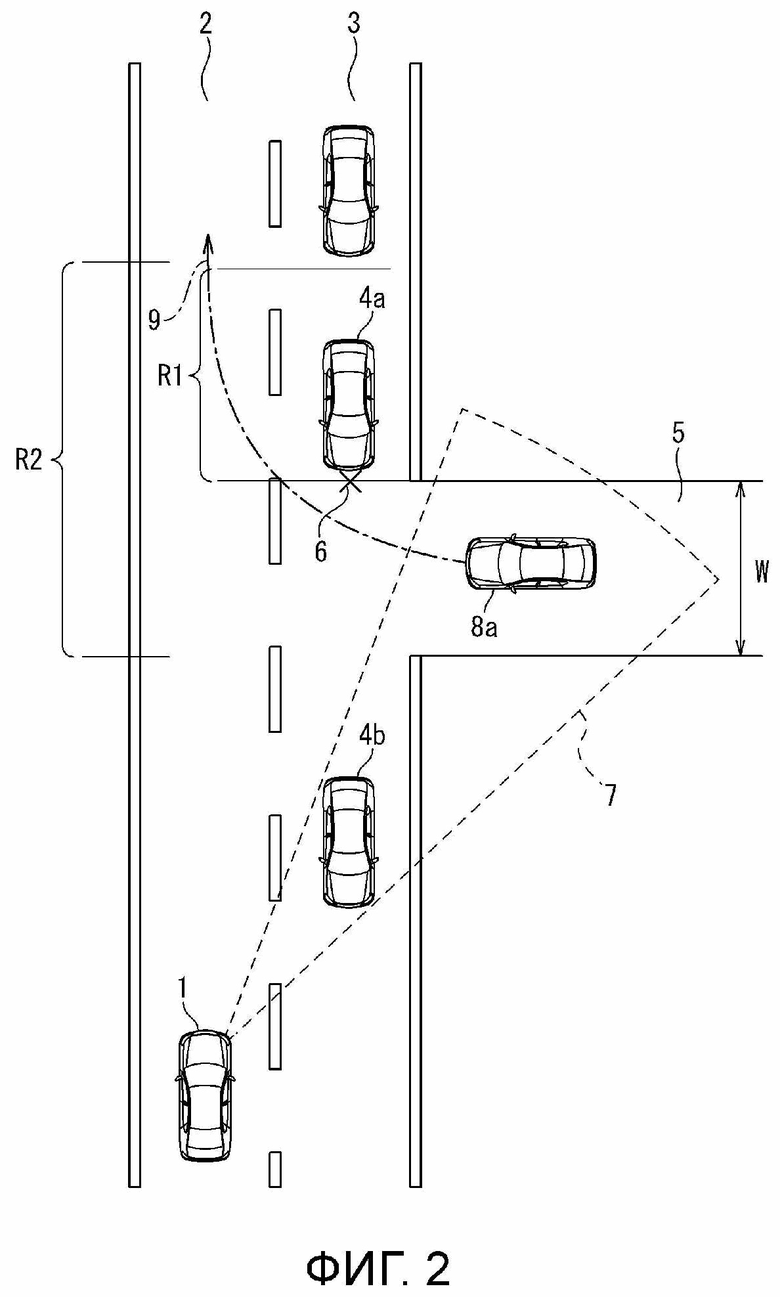
1. Способ прогнозирования поведения для мобильного субъекта, содержащий:
определение позиции главного транспортного средства;
определение позиции другого транспортного средства на второй полосе движения перемещения, причем вторая полоса движения перемещения является полосой движения, противоположной первой полосе движения перемещения, по которой перемещается главное транспортное средство;
обнаружение пересекающего проезда, пересекающего вторую полосу движения перемещения, в позиции впереди главного транспортного средства и имеющего выезд, из которого транспортное средство выезжает с внешней стороны второй полосы движения перемещения, причем выезд обращен ко второй полосе движения перемещения;
определение, находится ли другое транспортное средство в пределах предопределенного диапазона от позиции пересечения пересекающего проезда и второй полосы движения перемещения до некоторой точки, удаленной от позиции пересечения на предопределенное расстояние в направлении, противоположном направлению перемещения транспортного средства на второй полосе движения перемещения, и при этом другое транспортное средство находится либо в состоянии остановки, либо в состоянии замедления; и,
когда другое транспортное средство находится в пределах предопределенного диапазона, и при этом другое транспортное средство находится в любом состоянии из состояния остановки и состояния замедления, прогнозирование, что существует вероятность того, что мобильный субъект продвинется из упомянутого выезда и войдет в первую полосу движения перемещения из пересекающего проезда.
2. Способ прогнозирования поведения по п.1, в котором,
когда определено, что пересекающий проезд скрыт в слепой зоне при просмотре с главного транспортного средства, способ прогнозирования поведения прогнозирует, существует ли вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда.
3. Способ прогнозирования поведения по п.1 или 2, в котором,
когда обнаруживается, что сигнал поворота другого транспортного средства указывает на намерение повернуть в пересекающий проезд, способ прогнозирования поведения прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда.
4. Способ прогнозирования поведения по п.1 или 2, в котором,
когда обнаруживается, что фары другого транспортного средства включаются и выключаются, способ прогнозирования поведения прогнозирует, что существует вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда.
5. Способ прогнозирования поведения по любому из пп. 1-4, в котором,
когда определено, что пересекающий проезд является второстепенной дорогой или выездом из частной собственности, способ прогнозирования поведения прогнозирует, что существует вероятность того, что транспортное средство войдет в первую полосу движения перемещения из пересекающего проезда в качестве мобильного субъекта.
6. Способ прогнозирования поведения по любому из пп. 1-5, в котором,
когда ширина пересекающего проезда меньше предопределенного значения, способ прогнозирования поведения прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда, является высокой.
7. Способ прогнозирования поведения по любому из пп. 1-6, в котором,
когда определено, что никакое другое транспортное средство не присутствует в диапазоне предопределенного расстояния впереди главного транспортного средства на первой полосе движения перемещения, способ прогнозирования поведения прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда, является высокой.
8. Способ прогнозирования поведения по любому из пп. 1-7, в котором,
когда определено, что время остановки другого транспортного средства равно или больше предопределенного времени, способ прогнозирования поведения прогнозирует, что вероятность того, что мобильный субъект войдет в первую полосу движения перемещения из пересекающего проезда, является низкой.
9. Устройство прогнозирования поведения для мобильного субъекта, содержащее контроллер, сконфигурированный для выполнения:
обработки определения позиции главного транспортного средства;
обработки определения позиции другого транспортного средства на второй полосе движения перемещения, причем вторая полоса движения перемещения является полосой движения, противоположной первой полосе движения перемещения, по которой перемещается главное транспортное средство;
обработки обнаружения пересекающего проезда, пересекающего вторую полосу движения перемещения, в позиции впереди главного транспортного средства и имеющего выезд, из которого транспортное средство выходит с внешней стороны второй полосы движения перемещения, причем выезд обращен ко второй полосе движения перемещения;
обработки определения того, находится ли другое транспортное средство в пределах предопределенного диапазона от позиции пересечения пересекающего проезда и второй полосы движения пересечения до некоторой точки, удаленной от позиции пересечения на предопределенное расстояние в направлении, противоположном направлению перемещения транспортного средства на второй полосе движения перемещения, и при этом другое транспортное средство находится в любом состоянии из состояния остановки и состояния замедления; и
обработки, когда другое транспортное средство находится в пределах предопределенного диапазона, и при этом другое транспортное средство находится в любом состоянии из состояния остановки и состояния замедления, прогнозирования, что существует вероятность того, что мобильный субъект продвинется из упомянутого выезда и войдет в первую полосу движения перемещения из пересекающего проезда.
10. Транспортное средство, содержащее:
устройство прогнозирования поведения по п.9;
механизм замедления, сконфигурированный для замедления транспортного средства; и
информирующее устройство, сконфигурированное для информирования пассажира в транспортном средстве об информации, при этом
когда контроллер прогнозирует, что существует вероятность того, что мобильный субъект выедет на первую полосу движения перемещения из пересекающего проезда, контроллер, оперируя информирующим устройством, информирует пассажира о тревоге или, оперируя механизм замедления, замедляет транспортное средство.
| WO 2018198186 A1, 01.11.2018 | |||
| JP 2019008433 A, 17.01.2019 | |||
| JP 2010097480 A, 30.04.2010. |

