Изобретение относится к контрольно-измерительной технике и может быть использовано, например, при контроле дефектности изоляции обмоточных проводов.
Известен способ контроля дефектности изоляции проводов, описанный в [1]. В соответствии с этим способом целостность изоляции выражается числом точечных повреждений на проводе определенной длины, зафиксированных с помощью электрического испытательного устройства.
Образец провода длиной (30 ± 1) м протягивают со скоростью (275 ± 25) мм/с между двумя фетровыми пластинами, погруженными в электролитический раствор сернокислого натрия Na2SO4 в воде (концентрация 30 г/л). При этом между жилой провода и раствором, соединенными в электрическую цепь, прикладывают испытательное напряжение постоянного тока (50 ± 3) В при разомкнутой цепи. Усилие, прикладываемое к проводу, должно быть не более 0,03 Н. Точечные повреждения фиксируют соответствующим реле со счетчиком. Счетчик должен срабатывать при сопротивлении изоляции провода менее 10 кОм в течение не менее 0,04 с. Счетчик не должен срабатывать при сопротивлении 15 кОм и более. Цепь для определения повреждений должна работать со скоростью срабатывания (5 ± 1) мс, обеспечивая регистрацию с частотой (500 ± 25) повреждений в минуту при протягивании провода без изоляции. Контроль по указанному способу осуществляют на отрезках провода длиной 30 м, отрезанных от конца провода катушек, выбранных выборочно из партии однотипных катушек. Проводят одно испытание. Фиксируют число точечных повреждений на длине провода 30 м. Если количество точечных повреждений превышает некоторую допустимую для данного типа провода величину, то партию катушек, из которых выбраны испытательные отрезки проводов, отбраковывают.
Недостаток указанного способа заключается в том, что его применяют выборочно, для отрезка проводов, отрезанных от произвольно выбранных из партии катушек провода. Это приводит к тому, что основная часть провода в каждой контролируемой катушке остается не проконтролированной, не проконтролированными оказываются и остальные катушки партии, которые не попали под выборочный контроль, что снижает достоверность контроля. Кроме того, для реализации способа необходимо, чтобы контролируемый отрезок провода протягивался под датчиком точечных повреждений с постоянной относительно низкой (275 ± 25) мм/с скоростью провода. Это снижает точность и производительность контроля. Выбранный датчик точечных повреждений обладает низкой чувствительностью, поэтому указанный способ применяют только для проводов жилой номинальным диаметром до 0,050 мм включительно, имеющих тонкую толщину эмальизоляции. Между тем, как показывает практика, дефекты имеются и на проводах с большим диаметром, где указанный способ не применим. Это ограничивает сферу применения способа. Кроме того, способ является весьма затратным, так как уходят в отходы не только 30 метровые отрезки провода, но и все отбракованные катушки партии, которые не вписываются в диапазон допустимых значений количества точечных повреждений в эмальизоляции проводов.
Известен способ контроля дефектности изоляции проводов, по которому провод протягивают через датчик-электрод, на который относительно жилы провода подается высокое напряжение [2]. В момент прохождения дефекта в эмалевой изоляции через датчик-электрод зажигается коронный разряд и с него путем интегрирования импульсов разряда с постоянной времени интегрирования формируется импульс дефекта, который регистрируется в счетчике. Качество изоляции оценивают по количеству зарегистрированных импульсов в счетчике, считая, что их количество равно количеству дефектных участков изоляции провода.
Недостатком этого способа является низкая точность контроля дефектности, обусловленная особенностями коронного разряда в датчике-электроде. Эти особенности заключаются в том, что ток коронного разряда имеет импульсную форму, и под влиянием различных факторов (поперечные колебания провода, изменение окружающей среды, наличие загрязнения на проводе и т.п.) в моменты подхода дефекта к датчику-электроду и выхода из него разряд может погасать на некоторое время.
В упомянутом способе, для нормирования импульса дефекта интегрируются импульсы коронного разряда с постоянной времени интегрирования. Это приводит к тому, что на низких скоростях движения провода при подходе дефекта к датчику - электроду и выходе из него времена погасания коронного разряда могут превысить время интегрирования, в результате чего один дефект может быть зарегистрирован как два, три и более дефектов.
На высоких скоростях провода за время интегрирования через датчик-электрод пройдет значительный отрезок провода. Если на данном отрезке провода имеются дефекты, то они не будут зарегистрированы. Кроме того, если на проводе имеется N дефектов и время на прохождения участков провода между соседними дефектами меньше времени интегрирования, то эти N дефектов будут зарегистрированы как один дефект.
Известен способ контроля дефектности изоляции провода, согласно которому протягивают контролируемый провод через датчик-электрод, подают на него высокое напряжение до возникновения коронного разряда, измеряют частоту импульсов тока коронного разряда [3].
Однако в известном техническом решении имеют место недостатки: не учтено влияние зоны нестабильности коронного разряда, что приводит к тому, что с двух одинаковых дефектов на поверхности контролируемого провода будет зарегистрировано различное число импульсов коронного разряда, а также то, что при изменении скорости движения провода число импульсов коронного разряда с двух идентичных дефектов в эмальизоляции изменяется еще в более широком диапазоне.
Эти причины не позволяют произвести количественную оценку наличия микротрещин (дефектов) на проводе, а дают лишь некоторую ориентировочную качественную оценку состояния провода, что значительно снижает точность и достоверность контроля известно. Для того чтобы повысить достоверность, точность и оптимальность метрологических характеристик измерителей дефектности изоляции обмоточных проводов необходимо производить калибровку и поверку измерителей дефектности.
Наиболее близким к заявляемому является способ контроля дефектности изоляции провода, описанный в [4].
Способ-прототип заключается в подаче высокого напряжения на датчик дефектов, и в формировании импульсов дефектов, длительность Ti которых определяется временем горения разряда между жилой провода и электродами датчика дефектов при прохождении дефектного участка изоляции провода в активной зоне датчика дефектов, в процессе контроля непрерывно генерируют импульсы, частоту следования которых изменяют прямо пропорционально скорости движения провода, при этом воздушное пространство в области датчика дефектов непрерывно облучают ультрафиолетовым излучением, причем датчик дефектов перед контролем предварительно калибруют, для чего на бездефектном участке изоляции провода наносят искусственный точечный дефект в виде прокола до токопроводящей жилы провода, после чего указанный участок провода многократно протягивают через датчик дефектов и при каждом последующем протягивании напряжение на датчике повышают по сравнению с предыдущим протягиванием, эту процедуру осуществляют до тех пор пока при прохождении дефектного участка провода в зоне датчика дефектов не загорится коронный разряд, при зажигании которого формируют импульс дефекта, длительностью tc, и подсчитывают количество импульсов скорости k сгенерированных за время tc, после чего напряжение Up, при котором зажигается упомянутый коронный разряд принимают за рабочее напряжение, и контроль изоляции проводов осуществляют при упомянутой величине напряжения на датчике, причём при прохождении каждого дефектного участка изоляции через датчик дефектов, формируют импульс дефекта длительностью ti и подсчитывают количество ni сгенерированных импульсов скорости за упомянутое время ti, и протяженность li каждого дефекта определяют по формуле li= lэ (ni - k), где lэ - протяженность элементарного отрезка провода прошедшего через датчик дефектов за время одного сгенерированного импульса скорости.
Недостатком способа-прототипа является невозможность осуществления селективного контроля входных дефектов и дефектов, вносимых в изоляцию провода элементами оборудования при изготовлении из него обмоток.
Техническая задача, поставленная в рамках данного изобретения, заключается в создании возможности селективного контроля дефектов.
Решение поставленной технической задачи достигается тем, что в способе контроля дефектности изоляции обмоточных проводов, при котором непрерывно генерируют импульсы скорости, частоту которых изменяют пропорционально скорости провода, формируют импульс дефекта при прохождении каждого дефектного участка изоляции провода через датчик дефектов, длительность которого равняется времени прохождения дефектным участком через упомянутый датчик, подсчитывают количество сформированных после прохождения дефектными участками изоляции провода через датчик дефектов импульсов, по количеству которых определяют число входных дефектов на изоляции провода, подсчитывают количество импульсов скорости за время каждого сформированного импульса дефекта, и по результатам контроля определяют протяженности каждого дефекта, датчик дефектов выполняют в виде контактного электрода, который устанавливают на входе провода в намоточный станок и соединяют с корпусом намоточного станка через резистор Rр, а выход датчика дефектов соединяют с входом в компьютер с обученной нейронной сетью, выход которой подключают к маршрутизатору, подающему сигналы на входы формирователей импульсов входных и технологических дефектов, за единицу измерения протяженности принимают путь 1эк, который проходит любая точка движущегося провода за один импульс скорости, при этом подсоединяют жилу провода на одном из концов катушки намоточного провода к выходу источника стабилизированного тока I0, и в процессе намотки обмоток непрерывно контролируют напряжение на упомянутом резисторе и на выходе стабилизатора тока, причем предварительно перед контролем осуществляют калибровку счетчиков количества и протяженности дефектов, для этого на изоляции провода искусственно наносят один протяженный дефектов, измеряют его протяженность lид, и протягивают провод с нанесенным на него искусственным дефектом через контактный датчик дефектов и элементы намоточного оборудования, при прохождении искусственного дефектного участка изоляции через датчик дефектов регистрируют и передают в компьютер с обученной нейронной сетью момент времени t1ид возникновения падения напряжения на резисторе, и на выходе стабилизатора тока, и момент времени t2ид окончания падения напряжения на резисторе и стабилизаторе тока, где эти величины запоминаются, помимо этого с момента времени t1ид подсчитывают и запоминают в нейронной сети количество m1ид импульсов скорости за время прохождения упомянутого дефекта через датчик дефектов, которое равно времени tид=t2ид-t1ид падения напряжения на резисторе, и количество N импульсов скорости до момента времени t3ид вторичного возникновения импульсного падения напряжения на выходе стабилизатора тока, измеряют продолжительность времени падения напряжения на выходе стабилизатора тока с момента начала падения напряжения t3ид до момента t4ид окончания падения, длительность которого t2ид=t4ид-t3ид равняется времени падения напряжения на выходе стабилизатора тока, и подсчитывают количество m2ид импульсов скорости при прохождении упомянутого, нанесенного на изоляцию провода дефекта через элементы намоточного оборудования, затем после проведения упомянутых действий, осуществляют калибровку счетчиков, для чего в счетчик протяженности входных дефектов, при подсчете импульсов ni скорости во время регистрации протяженности каждого входного дефекта вносят поправку, и величину протяженности li каждого i-го входного дефекта определяют по формуле li = lэ [ni - (m1ид - lид/lэк)], и также вносят поправку в счетчик протяженности дефектов, вносимых оборудованием, и величину протяженности lj каждого j-го, вносимого оборудованием, определяют по формуле lj = lэ [nj - (m2ид - lид/lэк)], после калибровки производят контроль изоляции провода в процессе намотки обмоток электротехнических изделий, и при прохождении любого входного дефекта изоляции через датчик дефектов, измеряют момент времени ti1вх падения напряжения на резисторе и момент времени ti1c падения напряжения на выходе стабилизатора тока, подают эти значения на вход нейронной сети, в которой эти моменты сравнивают между собой, и при равенстве этих значений ti1вх = ti1c нейронная сеть вырабатывает управляющий импульс, который через маршрутизатор нейронной сети передает на вход формирователя импульсов входных дефектов, который формируют импульс дефекта, длительность которого tiвх равняется времени tiвх=ti2вх-ti1вх прохождения дефектного участка через датчик дефектов, причем подают сформированный в формирователе импульс входного дефекта только на вход счетчика количества и на вход счетчика протяженности входных дефектов, в которых подсчитывают количество и протяженность входных дефектов, при этом на выход формирователя импульсов технологических дефектов никакого сигнала из маршрутизатора нейронной сети не поступает, и счетчики количества и протяженности технологических дефектов упомянутый входной дефект не регистрируют, после прохождения любого входного дефекта с момента времени ti1вх начинают подсчет импульсов N1 скорости до момента последующего падения напряжения на выходе источника стабилизированного напряжения, подсчитанное число импульсов N1 скорости поступает в нейронную сеть и сравнивается с количеством импульсов N, подсчитанных при калибровке устройства, при этом если N=N1, нейронная сеть никаких управляющих сигналов не вырабатывает, и счетчики параметров входных и технологических дефектов ни какого счета не производят, если же N1
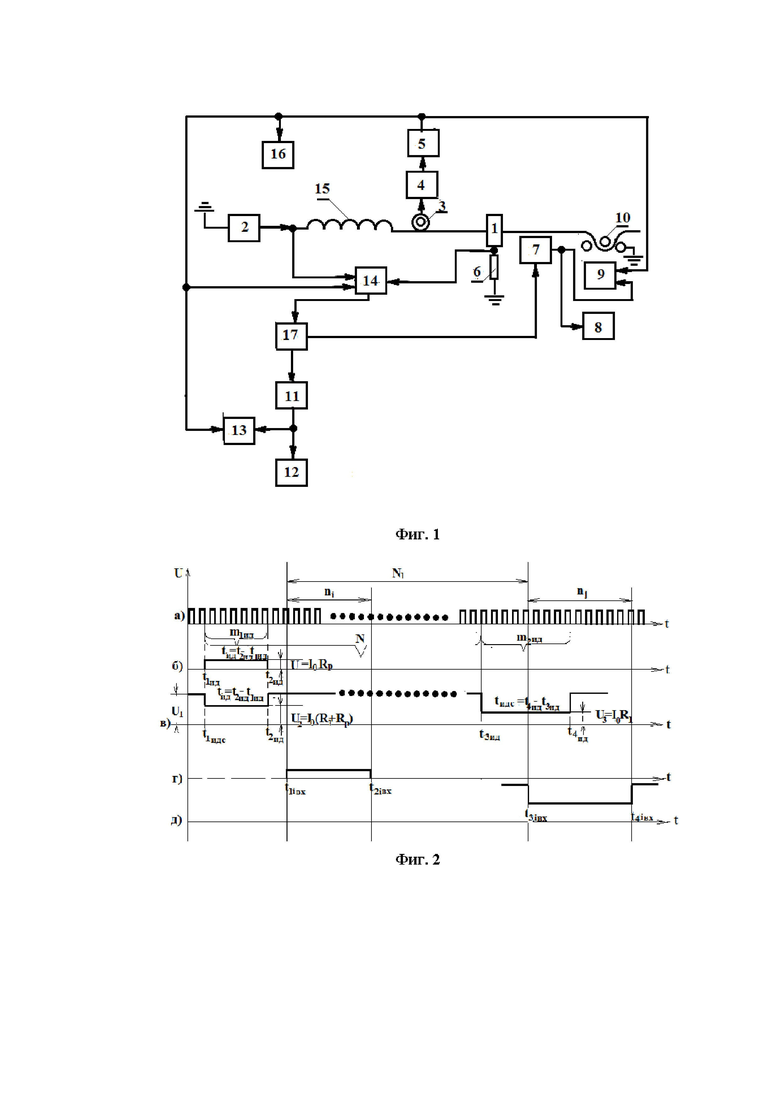
На фиг. 1 приведена структурная схема устройства, реализующего заявляемый способ. На фиг. 2 приведены эпюры сигналов, служащие для пояснения сущности изобретения. На фиг. 3 изображен совместный блок контактного электрода датчика и датчика скорости.
На фиг. 1 введены следующие обозначения: 1 - датчик дефектов; 2 - источник стабилизированного тока; 3 - датчик скорости; 4 - формирователь импульсов скорости; 5 - умножитель частоты; 6 - резистор; 7 - формирователь импульсов входных дефектов; 8 - счетчик количества входных дефектов; 9 - счетчик протяженности входных дефектов; 10 - элементы оборудования; 11 - формирователь импульсов технологических дефектов; 12 - счетчик количества технологических дефектов; 13 - счетчик протяженности технологических дефектов; 14 - обученная нейронная сеть; 15 - катушка провода; 16 - счетчик длины проконтролированного провода; 17 - маршрутизатор.
На фиг. 3 введены следующие обозначения: 18 - дискообразный блок (их два); 19 - шарикоподшипник; 20 - ось блока; 21 - жила контролируемого провода; 22 - эмалевая изоляция провода; 23 - контакт их проводящей резины; 24 - диск датчика скорости; 25 - отверстия; 26 - светодиод; 27 - фотодиод.
Сущность заявляемого способа заключается в следующем. При намотке обмоток в изоляции провода могут иметь место два вида дефектов: входные и технологические дефекты. Под входными дефектами понимают те дефекты, которые уже имеются в изоляции провода при его поставке. Под технологическими дефектами понимается повреждение изоляции провода элементами 10 намоточного оборудования до жилы провода. При движении провода в процессе намотки обмоток датчик 3 скорости (фиг. 1) вырабатывает импульсы скорости, частота которых пропорциональна скорости V движения провода. Эти импульсы поступают на вход формирователя 4 импульсов скорости, где происходит формирование их по напряжению и крутизне фронтов. Сформированные импульсы скорости поступают на вход умножителя частоты 5. Импульсы с выхода умножителя 5 частоты поступают на вход обученной нейронной сети 14 и на вход счетчика 16 длины проконтролированного провода. На счетный вход счетчика 16 длины проконтролированного провода непрерывно поступают импульсы скорости с умножителя частоты 5 с периодом следования, равным прохождению под датчиком скорости, фиксированной определенной длины lэ провода, например, lэ= 0,025 мм (фиг. 3 эпюра а).
Так как длительность одного импульса скорости соответствует прохождению через датчик дефектов строго фиксированной элементарной длины провода lэ, величина которой остается неизменной при изменении скорости, то проконтролированная длина провода, определяется величиной lпр = lэ×mпр, где mпр - количество импульсов скорости, прошедших в счетчик 16 за время контроля (фиг.3 эпюра а).
При протягивании контролируемого провода через датчик 3 скорости, последний выдает сигнал, частота которого пропорциональна скорости протягивания провода под датчиком. Этот сигнал поступает в формирователь 4 (фиг. 1) импульсов, с выхода которого сформированные импульсы скорости поступают на вход умножителя частоты 5. Обозначим период следования импульсов с умножителя частоты через Т1. При скорости движения провода V1 на выходе умножителя частоты 5 появляются импульсы, частотой f1=
lэ=V1×T1 (1)
При измерении скоростей протягивания провода в g раз пропорционально ей в g раз изменяется и частота импульсов эквивалентных точечных повреждений, что приводит к неизменности величины, определяемой по выражению (1).
Действительно, частота импульсов скорости изменяется пропорционально скорости провода Vпр
f= К1
где К1 - коэффициент пропорциональности, зависящий от конструкции датчика скорости.
За время одного периода индуцированного в датчике скорости напряжения, через датчик-электрод проходит участок провода длиной lэ, равный
lэ = Vпр × Тэ
где Tэ=l/f - период импульсов в датчике скорости.
Как следует из выражения (3), величина lэ, не зависит от скорости движения провода. Приняв lэ за единицу измерения, можно определить какая длина провода li прошла через датчик повреждений, если посчитать количество импульсов скорости n, в счетчике (рис. 1) за время контроля Ткон указанного отрезка провода.
li=n×lэ, (4)
где li - длина отрезка провода, прошедшего через датчик; n - количество импульсов скорости за время Ткон прохождения провода через датчик скорости 3.
Перед контролем предварительно обучают нейронную сеть 16, и калибруют счетчики устройства (фиг. 1), реализующего заявляемый способ. Для этой цели наносят в изоляции провода искусственный дефект (ИД), протяженность которого lид измеряют, и протягивают провод, с нанесенным в его изоляции искусственным дефект через датчик дефектов 1 (фиг. 1) и через элементы намоточного оборудования 10.
При прохождении участков обмоточного провода с бездефектной изоляцией через датчик дефектов 1, если элементы намоточного станка 10 не повреждают изоляцию, никаких изменений в сигналах устройства не происходит. При этом источник 2 стабилизированного постоянного тока находится в режиме стабилизации напряжения и на его выходе присутствует постоянный потенциал U1 (фиг. 3 эпюра в). Пусть в некоторый момент времени t1ид (фиг. 3 эпюра б) через контактный датчик 1 дефектов начинает проходить искусственно нанесенный дефектный участок эмалевой изоляции. В момент прохождения дефектного участка через электрод-датчик 1 происходит замыкание жилы провода через датчик 1 дефектов и резистор 6 на корпус станка и через указанные элементы начинает протекать стабилизированный ток I0. На резисторе 6 возникает импульс напряжения
U=I0Rp, где Rp - сопротивление резистора, длительностью tид=tид1-tид2 (фиг. 3 эпюра б).
Это напряжение будет находиться на резисторе Rp в течение времени tид прохождения дефектным участком через контактный датчик 1 дефектов. Моменты времени tид2 и tид2 регистрируются и вносятся в нейронную сеть 14. Счетчиком 16 подсчитывается и вносится в нейронную сеть количество m1ид импульсов скорости за время tид (фиг. 3 эпюра а и эпюра б). Одновременно с падением напряжения на сопротивлении 6, в момент времени t1идс происходит падение напряжения на выходе источника 2 стабилизированного тока с величины U1 до величины U2=I0(R1+Rp), где R1 сопротивление части провода катушки 10, откороченного на корпус станка через сопротивление 6 (см. фиг. 3 эпюра в). Момент времени t1идс также регистрируется и вносится в память нейронной сети 14. С момента tид1 падения напряжения на датчике 1 дефектов в счетчике 16 начинается подсчет импульсов скорости. Этот подсчет производится до момента tид3 следующего падения напряжения на выходе источника 2 стабилизированного тока при прохождении искусственного дефекта через элементы намоточного станка 10, при закоротке жилы провода в месте искусственного дефекта на корпус намоточного станка (фиг. 3 эпюра а). Момент времени tид3 и количество подсчитанных импульсов N за время tид3-tид1 также вносятся в память нейронной сети 14 (фиг. 3 эпюра а). Одновременно с этим производится подсчет импульсов скорости m2ид в счетчике 16 за время tидс=tид4-tид3 и величина m2ид также вносится в память нейронной сети 14 (фиг. 3 эпюра а).
Величины m1ид и m2ид нужны для того, чтобы исключить ошибки при подсчете протяженности входных и технологических дефектов. Эти ошибки устраняются следующим образом. В идеальном случае, если бы размеры контакта датчика 1 дефектов и размеры контакта элементов 10 оборудования имели бесконечно малую величину, то количество импульсов скорости при прохождении искусственного дефекта протяженностью lд за времена tид и tидс были бы одинаковы и равнялись бы величине mид=lд/lэ. В реальности же время контактирования жилы провода в месте дефекта с датчиком 1 дефектов и элементами намоточного оборудования 10 зависит не только от протяженности дефекта, но и от конструктивных особенностей датчика 1 дефектов и элементов 10 намоточного оборудования. Поэтому в счетчик 9 протяженности входных и в счетчик 13 протяженности технологических дефектов нужно внести корректировку на величины ∆mвх=m1ид-lд/lэ
и ∆mтех= m2ид- lд/lэ. Эти корректировки вносятся в счетчики 9 и 13 нейронной сетью, которая выдает управляющие сигналы через маршрутизатор 17 на формирователи 7 и 11 импульсов входных и технологических дефектов, не сразу по моменту падения напряжения на резисторе 6 или элементах 10 намоточного оборудования, а только после того, как в нейронную сеть пройдут ∆mвх или ∆mтех количества импульсов скорости соответственно. Управляющий сигнал на выходе нейронной сети 14, через маршрутизатор 17 поступает на входы формирователей 7 и 11, и на их выходе формируется импульс дефекта соответствующей длительности, который проходит на разрешающие входы указанных счетчиков 9 и 13.
Рассмотрим, каким образом исключается ложное срабатывание счетчиков 12 и 13 количества и протяженности технологических дефектов при прохождении входного дефекта через элементы 10 намоточного оборудования. Замыкание жилы в дефектном участке на корпус станка через контактный датчик 1 дефектов не вызовет ложного срабатывания счетчиков 12 и 13 количества и протяженности технологических дефектов. Запоминание времени реакции датчика дефектов 1 на входной дефект происходит следующим образом. В момент времени ti1вх жила провода в дефектном участке замыкает через контактный электрод-датчик 1 и резистор 6 на корпус станка. В результате часть провода откорочена через резистор 6 на корпус станка (общий провод) и сопротивление провода, заключенного между точкой подключения выхода источника 2 стабилизированного постоянного тока и дефектным участком изоляции, в месте которого происходит замыкание провода на корпус станка через резистор 6, принимает величину R1. Протекающий через сопротивления R1 и Rр стабильный постоянный ток I0, вызовет падение напряжения в момент времени t1с на выходе стабилизированного источника 2 постоянного тока до величины U2= I0(R1+Rp). Момент времени ti1вх начала падения напряжения на резисторе 6 и момент времени ti1вхс на выходе стабилизатора тока 2 поступает в нейронную сеть и сравниваются между собой. Если ti1вх=ti1вхс, т.е. моменты начала падения напряжения на резисторе 6, и на выходе стабилизатора 2 тока происходят одновременно, и длительность tiвх = ti2вх - ti1вх падения напряжения на указанных обоих элементах схемы одинаковы, то маршрутизатор нейронной сети 14 никакого сигнала на формирователь импульсов технологических дефектов 11 не подает, а выдает сигнал только на формирователь 7 импульсов входных дефектов. Формирователь 7 импульсов входных дефектов формирует импульс дефекта, длительность которого равна Tiвх = Т1[(ni-∆mвх)], где ni - количество импульсов скорости, пришедших в счетчик 16 длины провода за время tiвх. Этот импульс поступает на разрешающий вход счетчика 8 и подсчитывается как один дефект. Одновременно этот же импульс поступает на разрешающий вход счетчика 9 протяженности входных дефектов. Счетчик и открывается и подсчитывает протяженность входного дефекта по формуле li = lэ [ni - (m1ид - lид/lэк)]. Счетчики 12 и 13 в режим счета не входят и их ложного срабатывания в момент прохождения входного дефектного участка через датчик 1 дефектов не происходит.
По мере продвижения входного дефекта от датчика 1 дефектов через элементы 10 намоточного оборудования жила провода в месте этого входного дефекта изоляции может вызвать очередное замыкание через указанные элементы 10 на корпус намоточного станка, что также может привести к ложному срабатыванию счетчиков 12 и 13.
Чтобы этого не происходило с момента времени ti1вх начала падения напряжения на резисторе 6 (фиг. 3 эпюра г) в счетчике 16 длины проконтролированного провода начинается отсчет импульсов скорости. Этот подсчет происходит до тех пор, пока жила входного дефект не вызовет следующее падения напряжения на выходе стабилизатора тока 2 в момент времени t3iвх (фиг. 3 эпюра д). Допустим за указанный интервал времени t3iвх-ti1вх было подсчитано N1 импульсов скорости (фиг. 3 эпюра а). Покажем, как используется полученная информация при контроле изоляции провода в реальном процессе. Количество подсчитанных импульсов скорости N1 поступает в нейронную сеть 14 и сравнивается с количеством импульсов N внесенных в память нейронной сети при её обучении и калибровке устройства. Если N1=N, то маршрутизатор нейронной сети в течение времени tiвх4-tiвх3 никаких сигналов на формирователь импульсов 11 не выдает, и на разрешающие входы счетчиков 12 и 13 никаких импульсов не поступает. Количество и параметры входных дефектов счетчиками 12 и 13 не регистрируются. Если же N1
Пример конкретного выполнения. Был проведен контроль по заявляемому способу при помощи измерителя дефектности обмоточных проводов, реализующему заявляемый способ, блок-схема которого приведена на фиг. 1. Электрод - датчик дефектов и датчик скорости были объединены в единый блок (фиг. 3)
Контактный датчик - электрод дефектов представлял собой два соприкасающихся по образующей цилиндрических ролика-электрода 18 (фиг. 3). Электроды через подшипники 19 размещались на осях 20, которые закреплены на подвижных, поджатых друг к другу пластинчатыми пружинами рычагах (коромыслах) (на фиг. 3 не показаны), позволяющих электродам-роликам совершать вертикальные перемещения синхронно с колебаниями провода. На фиг. 3 стрелками показано, что электроды 18 поджимаются друг к другу при помощи пружин, размещенных на коромыслах. Напряжение от стабилизированного источника тока к электродам 18 подводилось через скользящие контакты, поджатые к осям 20. По образующей роликов - электродов была выполнена полукруглая проточка в которую размещался эластичный контакт 23, выполненный из проводящей резины. При контроле эмаль 22 контролируемого провода 21 (на фиг. 3 закрашена темным цветом) плотно обжималась эластичными проводящими контактами 23. Под действием трения поверхности провода с поверхностями эластичных контактов 23 размещенных проточках в электродов 18, последние начинают вращаться на подшипниках 19 вокруг осей 20. При вращении ролика 18 приходит во вращение прикрепленный к нему соосно диск 24 (см. фиг. 3) с равномерно выполненными в нем сквозными радиальными прорезями 25. Светодиод 26 излучает свет, который через прорези 25 поступает к фотодиоду 27. Поскольку радиальные сквозные прорези 25 размещены равномерно по поверхности диска, то свет, проходя через упомянутые прорези, инициирует в фотодиоде, играющем роль приемника, импульсный ток. Количество импульсов тока в фотодиоде за один оборот ролика 18 будет равно количеству n - прорезей, а длина провода l, прошедшего через датчик за один оборот будет равна
где D - диаметр ролика 18, в мм; d - диаметр проточки под провод по образующей ролика 18, в мм.
За время, равное длительности одного импульса фототока на выходе фотодиода 27 через датчик пройдет элементарный отрезок провода, равный
При этом независимо от того, с какой скоростью будет протягиваться провод через датчик, величина элементарного отрезка провода lэ, определяемая формулой 6 всегда будет оставаться неизменной, так как все величины входящие в формулу 6 постоянны.
При этом, чем больше количество прорезей n тем меньше величина lэ, принятая за единицу измерения протяженности, и тем выше точность определения указанной протяженности. По количеству К импульсов фототока с выхода фотодиода 27, прошедших в электронную схему измерителя дефектности можно определить длину L проконтролированного провода по формуле
Кроме длины проконтролированного провода L, (счетчик 16 фиг. 1) можно определить также и протяженность каждого дефектного участка провода счетчиками 9 и 13 (фиг. 1).
Заявляемым способом осуществлялся контроль дефектности изоляции обмоточного провода марки ПЭТВ диаметром 0,8 мм. В качестве датчика скорости 3 (фиг. 1) и контактного электрода - датчика дефектов 1 (фиг. 1), был использован функциональный блок, схематически приведенный на фиг. 3, включающий в себя эти элементы. Упомянутый блок, приведенный фиг. 4, включал в себя фотоэлектрический преобразователь перемещений.
Рабочим элементом блока служили ролики 18 с эластическим контактом 23. Диаметры роликов были равны 12 мм. По образующей поверхности роликов были проточены канавки радиусом равным 2 мм. В проточки укладывалась манжета из проводящей резины 23 Образующие поверхности роликов 18 прижимали друг к другу пружины, выполненные из стальной упругой пластины толщиной 1 мм. К боковой поверхности одного из роликов 18 были механически (сваркой) прикреплен стакан с диском 24 (фиг. 3) с равномерно выполненными в нем сквозными радиальными прорезями 25. При диаметре 19,1 мм диска 25 нам удалось выполнить фотолитографией растр с 240 прорезями.
В качестве светодиода 26 использовалась лампа vfhrb UV-Inspector 2000 [3]. Срок работы от одной зарядки - около 4-х часов. Интенсивность УФ-излучения при 400 мм: 2000 μW/см2. Длина волны: 365 нм.
В качестве фотодиода 27 был взят ультрафиолетовый фотодиод компании SGLUX выполненный на основе карбида кремния (SiC).
В качестве формирователя импульсов скорости 5 (фиг. 1) был использован умножитель частоты с коэффициентом умножения равном 10. С использованием функционального блока, приведенного на фиг. 3 и введения в устройство умножителя частоты удалось обеспечить величину 
Перед контролем предварительно обучали нейронную сеть 16, и калибровали счетчики устройства (фиг. 1), реализующего заявляемый способ. Для этой цели наносили в изоляции провода искусственный дефект (ИД), протяженность которого lид измерялась штангенциркулем и была равной lид=5мм. После нанесения в изоляции провода искусственного дефекта протягивали провод, через датчик дефектов 1 (фиг. 1) и через элементы намоточного оборудования 10.
При прохождении участков обмоточного провода с бездефектной изоляцией через датчик дефектов 1, если элементы намоточного станка 10 не повреждают изоляцию, никаких изменений, в сигналах устройства не происходит. При этом источник 2 стабилизированного постоянного тока находится в режиме стабилизации напряжения и на его выходе присутствует постоянный потенциал U1 (фиг. 3 эпюра в). В момент времени t1ид=1с после начала протягивания провода (фиг. 3 эпюра б) через контактный датчик 1 дефектов начал проходить искусственно нанесенный дефектный участок эмалевой изоляции. В момент прохождения дефектного участка через электрод-датчик 1 происходило замыкание жилы провода через датчик 1 дефектов и резистор 6 на корпус станка и через указанные элементы начинает протекать стабилизированный ток I0. На резисторе 6 возник импульс напряжения U=I0Rp, где Rp - сопротивление резистора, длительностью tид=tид1-tид2=0,032 сек (фиг. 3 эпюра б).
Это напряжение находилось на резисторе Rp в течение времени tид прохождения дефектным участком через контактный датчик 1 дефектов. Моменты времени tид1=1с и tид2=1,032 с регистрировались при помощи двухлучевого осциллографа, подключенного к сопротивлению 6 и к выходу источника 2 стабилизатора тока. Измеренные значения вносились в нейронную сеть 14. Счетчиком 16 подсчитывался и вносится в нейронную сеть количество m1ид=400 импульсов скорости за время tид (фиг. 3 эпюра а и эпюра б). Одновременно с падением напряжения на сопротивлении 6, в момент времени t1идс=1с происходило падение напряжения на выходе источника 2 стабилизированного тока с величины U1 до величины U2=I0(R1+Rp), где R1 сопротивление части провода катушки 10, откороченного на корпус станка через сопротивление 6 (см. фиг. 3 эпюра в). Момент времени t1идс=1с также регистрировался и вносится в память нейронной сети 14. С момента tид1=1с падения напряжения на датчике 1 дефектов в счетчике 16 начинался подсчет импульсов скорости. Этот подсчет производится до момента tид3=5с следующего падения напряжения на выходе источника 2 стабилизированного тока при прохождении искусственного дефекта через элементы намоточного станка 10, при закоротке жилы провода в месте искусственного дефекта на корпус намоточного станка (фиг. 3 эпюра а). Момент времени tид3=6 сек и количество подсчитанных импульсов N=60000 за время tид3-tид1=5 сек также вносились в память нейронной сети 14 (фиг. 3 эпюра а). Падение напряжения на выходе стабилизатора тока закончилось в момент времени tид4=6, 064 сек. Одновременно с этим производился подсчет импульсов скорости m2ид в счетчике 16 за время tидс=tид4-tид3=0,064 сек и величина m2ид=800 импульсов скорости также вносится в память нейронной сети 14 (фиг. 3 эпюра а).
Величины m1ид и m2ид нужны для того, чтобы исключить ошибки при подсчете протяженности входных и технологических дефектов. Эти ошибки устраняются следующим образом. В идеальном случае, если бы размеры контакта датчика 1 дефектов и размеры контакта элементов 10 оборудования имели бесконечно малую величину, то количество импульсов скорости при прохождении искусственного дефекта протяженностью lд за времена tид и tидс были бы одинаковы и равнялись бы величине mид=lд/lэ=200. В реальности же время контактирования жилы провода в месте дефекта с датчиком 1 дефектов и элементами намоточного оборудования 10 зависит не только от протяженности дефекта, но и от конструктивных особенностей датчика 1 дефектов и элементов 10 намоточного оборудования. Поэтому в счетчик 9 протяженности входных и в счетчик 13 протяженности технологических дефектов нужно внести корректировку на величины ∆mвх=m1ид-lд/lэ=400-200=200 и Δmтех=m2ид-lд/lэ=800-200=600. Эти корректировки вносятся в счетчики 9 и 13 нейронной сетью, которая выдает управляющие сигналы через маршрутизатор 17 на формирователи 7 и 11 импульсов входных и технологических дефектов, не сразу по моменту падения напряжения на резисторе 6 или элементах 10 намоточного оборудования, а только после того, как в нейронную сеть пройдут ∆mвх или ∆mтех количества импульсов скорости соответственно. Управляющий сигнал на выходе нейронной сети 14, через маршрутизатор 17 поступает на входы формирователей 7 и 11, и на их выходе формируется импульс дефекта соответствующей длительности, который проходит на разрешающие входы указанных счетчиков 9 и 13.
Рассмотрим, каким образом исключается ложное срабатывание счетчиков 12 и 13 количества и протяженности технологических дефектов при прохождении входного дефекта через элементы 10 намоточного оборудования. Замыкание жилы в дефектном участке на корпус станка через контактный датчик 1 дефектов не вызовет ложного срабатывания счетчиков 12 и 13 количества и протяженности технологических дефектов. Запоминание времени реакции датчика дефектов 1 на входной дефект происходит следующим образом. В момент времени ti1вх жила провода в дефектном участке замыкает через контактный электрод-датчик 1 и резистор 6 на корпус станка. В результате часть провода откорочена через резистор 6 на корпус станка (общий провод) и сопротивление провода, заключенного между точкой подключения выхода источника 2 стабилизированного постоянного тока и дефектным участком изоляции, в месте которого происходит замыкание провода на корпус станка через резистор 6, принимает величину R1. Протекающий через сопротивления R1 и Rр стабильный постоянный ток I0, вызовет падение напряжения в момент времени t1с на выходе стабилизированного источника 2 постоянного тока до величины U2=I0(R1+Rp). Момент времени ti1вх начала падения напряжения на резисторе 6 и момент времени ti1вхс на выходе стабилизатора тока 2 поступает в нейронную сеть и сравниваются между собой. Если ti1вх=ti1вхс, т.е. моменты начала падения напряжения на резисторе 6, и на выходе стабилизатора 2 тока происходят одновременно, и длительность tiвх=ti2вх-ti1вх падения напряжения на указанных обоих элементах схемы одинаковы, то маршрутизатор нейронной сети 14 никакого сигнала на формирователь импульсов технологических дефектов 11 не подает, а выдает сигнал только на формирователь 7 импульсов входных дефектов. Формирователь 7 импульсов входных дефектов формирует импульс дефекта, длительность которого равна Tiвх=Т1[(ni-∆mвх)], где ni - количество импульсов скорости, пришедших в счетчик 16 длины провода за время tiвх. Этот импульс поступает на разрешающий вход счетчика 8 и подсчитывается как один дефект. Одновременно этот же импульс поступает на разрешающий вход счетчика 9 протяженности входных дефектов. Счетчик и открывается и подсчитывает протяженность входного дефекта по формуле li = lэ [ni - (m1ид - lид/lэк)]. Счетчики 12 и 13 в режим счета не входят и их ложного срабатывания в момент прохождения входного дефектного участка через датчик 1 дефектов не происходит.
По мере продвижения входного дефекта от датчика 1 дефектов через элементы 10 намоточного оборудования жила провода в месте этого входного дефекта изоляции может вызвать очередное замыкание через указанные элементы 10 на корпус намоточного станка, что также может привести к ложному срабатыванию счетчиков 12 и 13.
Чтобы этого не происходило с момента времени ti1вх начала падения напряжения на резисторе 6 (фиг. 3 эпюра г) в счетчике 16 длины проконтролированного провода начинается отсчет импульсов скорости. Этот подсчет происходит до тех пор, пока жила входного дефект не вызовет следующее падения напряжения на выходе стабилизатора тока 2 в момент времени t3iвх (фиг. 3 эпюра д). Допустим за указанный интервал времени t3iвх-ti1вх было подсчитано N1 импульсов скорости (фиг. 3 эпюра а). Покажем, как используется полученная информация при контроле изоляции провода в реальном процессе. Количество подсчитанных импульсов скорости N1 поступает в нейронную сеть 14 и сравнивается с количеством импульсов N внесенных в память нейронной сети при её обучении и калибровке устройства. Если N1=N, то маршрутизатор нейронной сети в течение времени tiвх4-tiвх3 никаких сигналов на формирователь импульсов 11 не выдает, и на разрешающие входы счетчиков 12 и 13 никаких импульсов не поступает. Количество и параметры входных дефектов счетчиками 12 и 13 не регистрируются. Если же N1
После обучения нейронной сети и калибровки счетчиков устройства реализующего заявляемый способ проверяли работоспособность заявляемого способа.
Для проверки работоспособности и точности контроля дефектности изоляции провода станок останавливали и на бездефектном участке изоляции отрезка провода наносили 2 дефекта, протяженностью 2 мм и 4 мм перед датчиком 1 дефектов (фиг. 1) и 2 таких же дефекта по протяженности дефекта после него. После этого запускали станок и проверяли показатели прибора. Счетчик 8 количества входных дефектов, зарегистрировал n=2 дефекта. Счетчик 9 зарегистрировал 400 импульсов скорости. Так как за длительность одного импульса проходит отрезок провода lэ=0,025 мм, то суммарная протяженность входных дефектов, зарегистрированная в счетчике 9 была равна lвх=0,025×240=6 мм. Средняя протяженность каждого входного дефекта будет равна lср=lвх/n=6/2=3 мм. Счетчик 12, показал, что технологическое оборудование (элементы намоточного станка 10), создали в изоляции провода k=2 дефекта. Счетчик 13 протяженности технологических дефектов количества дефектов зарегистрировал величину 240 импульсов скорости и определенная этим счетчиком суммарная протяженность всех дефектов оказалась равной L=0,025×240=6 мм.
Способ-прототип смог бы зарегистрировать только 2 входных дефекта с протяженностью 6 мм, а дефекты вносимые элементами оборудования указанным способом зарегистрировать невозможно.
Таким образом, по сравнению с прототипом заявляемый способ позволяет регистрировать не только входные дефекты и их протяженность, но и дефекты, и их протяженность, вносимые в изоляцию обмоточного провода элементами намоточного оборудования. Иными словами заявляемый способ позволяет осуществлять селективный контроль входных и технологических дефектов, чего невозможно было выполнить способом - прототипом.
Источники информации
1. ГОСТ Р МЭК 60851-5-2008. Провода обмоточные. Методы испытаний. Часть 5. Электрические свойства.
2. Смирнов Г.В. Прибор контроля качества эмалевой изоляции обмоточных проводов. Ж. Надежность и контроль качества, 1987, № 10, с. 51.
3. Авторское свидетельство СССР № 364885, кл. G01N 27/68.
4. Патент РФ 2737515 (по заявке 2020107811 от 21.02.20). Способ контроля дефектности изоляции обмоточных проводов / Смирнов Г.В. Опубл. 01.12.2020. Бюл. № 34, 15 стр. (Прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ОБМОТОЧНЫХ ПРОВОДОВ | 2021 |
|
RU2762126C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ПРОВОДОВ | 2021 |
|
RU2771743C1 |
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ПРОВОДА | 2021 |
|
RU2771480C1 |
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ОБМОТОЧНЫХ ПРОВОДОВ | 2021 |
|
RU2767959C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ПРОВОДА | 2021 |
|
RU2764385C1 |
| УСТРОЙСТВО СЕЛЕКТИВНОГО КОНТРОЛЯ КАЧЕСТВА ИЗОЛЯЦИИ ОБМОТОЧНЫХ ПРОВОДОВ | 2021 |
|
RU2757980C1 |
| СПОСОБ КОНТРОЛЯ И РЕМОНТА ИЗОЛЯЦИИ ПРОВОДОВ | 2012 |
|
RU2506601C1 |
| СПОСОБ КОНТРОЛЯ И РЕМОНТА ИЗОЛЯЦИИ ПРОВОДОВ | 2012 |
|
RU2506602C1 |
| СПОСОБ КОНТРОЛЯ ЭМАЛЕВОЙ ИЗОЛЯЦИИ ПРОВОДОВ | 2012 |
|
RU2511229C2 |
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ОБМОТОЧНЫХ ПРОВОДОВ | 2020 |
|
RU2737515C1 |

Изобретение относится к технике электрических испытаний и может быть использовано для контроля качества изоляции проводов в процессе изготовления из них обмоток электротехнических изделий. Сущность: непрерывно генерируют импульсы скорости, формируют импульс дефекта при прохождении дефектного участка изоляции провода через датчик дефектов, подсчитывают количество импульсов, по количеству которых определяют число входных дефектов на изоляции, подсчитывают количество импульсов скорости за время каждого сформированного импульса дефекта и определяют протяженности каждого дефекта. Датчик дефектов выполняют в виде контактного электрода, который устанавливают на входе провода в намоточный станок и соединяют с корпусом намоточного станка через резистор Rр. Выход датчика дефектов соединяют с входом в компьютер с обученной нейронной сетью, выход которой подключают к маршрутизатору, подающему сигналы на входы формирователей импульсов входных и технологических дефектов. Подсоединяют жилу провода на одном из концов катушки намоточного провода к выходу источника стабилизированного тока I0. В процессе намотки обмоток непрерывно контролируют напряжение на резисторе и на выходе стабилизатора тока. Перед контролем осуществляют калибровку счетчиков количества и протяженности дефектов с помощью искусственно нанесенного дефекта и нейронной сети. Далее производят контроль изоляции провода в процессе намотки обмоток с использованием обученной нейронной сети. Нейронная сеть вырабатывает управляющий импульс, который через маршрутизатор передается на вход формирователя импульсов входных дефектов или формирователь импульсов технологических дефектов. Технический результат: возможность осуществлять селективный контроль входных и технологических дефектов. 3 ил.
Способ контроля дефектности изоляции провода, при котором непрерывно генерируют импульсы скорости, частоту которых изменяют пропорционально скорости провода, формируют импульс дефекта при прохождении каждого дефектного участка изоляции провода через датчик дефектов, длительность которого равняется времени прохождения дефектным участком через упомянутый датчик, подсчитывают количество сформированных после прохождения дефектными участками изоляции провода через датчик дефектов импульсов, по количеству которых определяют число входных дефектов на изоляции провода, подсчитывают количество импульсов скорости за время каждого сформированного импульса дефекта, и по результатам контроля определяют протяженности каждого дефекта, отличающийся тем, что датчик дефектов выполняют в виде контактного электрода, который устанавливают на входе провода в намоточный станок и соединяют с корпусом намоточного станка через резистор Rр, а выход датчика дефектов соединяют с входом в компьютер с обученной нейронной сетью, выход которой подключают к маршрутизатору, подающему сигналы на входы формирователей импульсов входных и технологических дефектов, за единицу измерения протяженности принимают путь 1эк, который проходит любая точка движущегося провода за один импульс скорости, при этом подсоединяют жилу провода на одном из концов катушки намоточного провода к выходу источника стабилизированного тока I0, и в процессе намотки обмоток непрерывно контролируют напряжение на упомянутом резисторе и на выходе стабилизатора тока, причем предварительно перед контролем осуществляют калибровку счетчиков количества и протяженности дефектов, для этого на изоляции провода искусственно наносят один протяженный дефект, измеряют его протяженность lид и протягивают провод с нанесенным на него искусственным дефектом через контактный датчик дефектов и элементы намоточного оборудования, при прохождении искусственного дефектного участка изоляции через датчик дефектов регистрируют и передают в компьютер с нейронной сетью момент времени t1ид возникновения падения напряжения на резисторе и на выходе стабилизатора тока и момент времени t2ид окончания падения напряжения на резисторе и стабилизаторе тока, где эти величины запоминаются, помимо этого с момента времени t1ид подсчитывают и запоминают в нейронной сети количество m1ид импульсов скорости за время прохождения упомянутого дефекта через датчик дефектов, которое равно времени tид= t2ид- t1ид падения напряжения на резисторе, и количество N импульсов скорости до момента времени t3ид вторичного возникновения импульсного падения напряжения на выходе стабилизатора тока, измеряют продолжительность времени падения напряжения на выходе стабилизатора тока с момента начала падения напряжения t3ид до момента t4ид окончания падения, длительность которого t2ид=t4ид-t3ид равняется времени падения напряжения на выходе стабилизатора тока, и подсчитывают количество m2ид импульсов скорости при прохождении упомянутого нанесенного на изоляцию провода дефекта через элементы намоточного оборудования, затем после проведения упомянутых действий осуществляют калибровку счетчиков, для чего в счетчик протяженности входных дефектов при подсчете импульсов ni скорости во время регистрации протяженности каждого входного дефекта вносят поправку и величину протяженности li каждого i-го входного дефекта определяют по формуле li = lэ [ni – (m1ид - lид/lэк)], и также вносят поправку в счетчик протяженности дефектов, вносимых оборудованием, и величину протяженности lj каждого j-го вносимого оборудованием дефекта определяют по формуле lj = lэ [nj - (m2ид - lид/lэк)], после калибровки производят контроль изоляции провода в процессе намотки обмоток электротехнических изделий и при прохождении любого входного дефекта изоляции через датчик дефектов измеряют момент времени ti1вх падения напряжения на резисторе и момент времени ti1c падения напряжения на выходе стабилизатора тока, подают эти значения на вход нейронной сети, в которой эти моменты сравнивают между собой, и при равенстве этих значений ti1вх = ti1c нейронная сеть вырабатывает управляющий импульс, который через маршрутизатор нейронной сети передает на вход формирователя импульсов входных дефектов, который формирует импульс дефекта, длительность которого tiвх равняется времени tiвх= ti2вх- ti1вх прохождения дефектного участка через датчик дефектов, причем подают сформированный в формирователе импульс входного дефекта только на вход счетчика количества и на вход счетчика протяженности входных дефектов, в которых подсчитывают количество и протяженность входных дефектов, при этом на выход формирователя импульсов технологических дефектов никакого сигнала из маршрутизатора нейронной сети не поступает и счетчики количества и протяженности технологических дефектов упомянутый входной дефект не регистрируют, после прохождения любого входного дефекта с момента времени ti1вх начинают подсчет импульсов N1 скорости до момента последующего падения напряжения на выходе источника стабилизированного напряжения, подсчитанное число импульсов N1 скорости поступает в нейронную сеть и сравнивается с количеством импульсов N, подсчитанных при калибровке устройства, при этом, если N= N1 , нейронная сеть никаких управляющих сигналов не вырабатывает, и счетчики параметров входных и технологических дефектов никакого счета не производят, если же N1
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗОЛЯЦИИ ОБМОТОЧНЫХ ПРОВОДОВ | 2020 |
|
RU2737515C1 |
| Способ контроля качества изоляционного покрытия провода | 1983 |
|
SU1100642A1 |
| СПОСОБ КОНТРОЛЯ МИКРОПРОВОЛОКИ | 0 |
|
SU364885A1 |
| Способ контроля дефектности изоляции провода и устройство для его осуществления | 1989 |
|
SU1786414A1 |
| О П и С~Ж~Н^Г Е ИЗОБРЕТЕНИЯ | 0 |
|
SU394525A1 |

