Изобретение касается устройства для поддерживания по меньшей мере одной руки пользователя, причем это устройство имеет по меньшей мере один опорный элемент для руки, имеющий повязку для руки для надевания на руку, по меньшей мере один пассивный рабочий орган, который предназначен для приложения силы по меньшей мере к одному опорному элементу для руки, и по меньшей мере одну ответную опору для прикладываемой силы, которая имеет по меньшей мере один ответный опорный элемент и по меньшей мере один элемент для передачи силы, предназначенный для передачи силы реакции на ответный опорный элемент.
Такое устройство известно, например, из US 2016/0081871 A1. Оно располагает ответным опорным элементом, который выполнен в виде накладываемого вокруг торса пользователя ремня. На нем находятся две проходящие вдоль спины к надплечью опорные перемычки, которые выше и сбоку рядом с надплечьями пользователя соединены каждая с сочленением, так что рука может подниматься. На соответствующих сочленениях расположены пружинные элементы, с помощью которых на повязки для рук может действовать направленная вверх сила, так что, например, может осуществляться поддержка рук при поднятии тяжелых предметов или при работе с поднятыми над головой руками. Если надо опустить руки, со стороны рук на повязки для рук должно оказываться давление, которое превышает силу, прикладываемую пружинными элементами, так чтобы руки опускались.
Из WO 2014/093408 A2 и US 9,427,865 B2 известно соответствующее устройство, у которого в качестве механического накопителя энергии, который действует как пассивный рабочий орган, предусмотрена в каждом случае пружина, в частности пружина растяжения, которая соединена с тросом Боудена. Трос Боудена проводится через обводной шкив, так что при повороте руки, что означает движение опорного элемента для руки относительно ответного опорного элемента, пружина растягивается, так что механический накопитель энергии заряжается энергией.
В частности, в том случае, когда пользователь устройства, например, спотыкается или падает и, например, должен скатываться, такие устройства могут приводить к опасности для пользователя и к травмам. Это случается, хотя расположенные вне плечевого сустава сочленения устройства, например, по уровню техники, расположены наиболее точным возможным образом так, что их оси сочленений и оси поворота проходят через соответствующие оси плечевого сустава, так что предположительно могут воспроизводиться все движения, которые может выполнять природное надплечье и вместе с тем рука пользователя.
Одно из активных устройств, которое поддерживает руки при работе с поднятыми над головой руками, известно из EP 3 156 193 A1. Повязки для рук соединены друг с другом множеством разных сочленений и соединительных рамных элементов. Благодаря этому как можно большее количество из тех движений, которые может выполнять плечевой сустав, должны быть возможны также вместе с надетым устройством. Однако это устройство из–за множества элементов является большим, конструктивно сложным и поэтому дорогим. Вдобавок к этому, устройство пытается воспроизвести плечевой сустав с помощью двух шарнирных сочленений. Из–за этого возможны не все движения, которые может выполнять природный плечевой сустав. В частности, для поднятия руки в определенном направлении сначала предусмотренное для этого сочленение должно вращаться в правильное положение, чтобы его ось поворота указывала в желаемом направлении. Из–за этого в данном случае должны выполняться дополнительные и неестественные движения, вследствие чего снижается комфорт и вместе с тем приемлемость этого устройства для пользователя.
Другие поддерживающие устройства, которые, в частности, поддерживают при поднятии тяжелых предметов или при работе с поднятыми над головой руками, известны из WO 2014/195373 A1 и US 2016/339583 A1. Однако эти устройства ориентированы только на особые движения, которые надо поддерживать.
Поэтому в основе изобретения лежит задача устранить или по меньшей мере уменьшить эти недостатки.
Изобретение решает поставленную задачу с помощью устройства согласно ограничительной части п.1 формулы изобретения, которое отличается тем, что этим устройством не ограничена свобода движения позвоночника пользователя, при этом, в частности, возможна инклинация, и/или устройством не ограничена свобода движения руки.
Изобретение решает поставленную задачу, кроме того, с помощью устройства согласно ограничительной части п.2 формулы изобретения, которое отличается тем, что указанная по меньшей мере одна повязка для руки может двигаться относительно указанного по меньшей мере одного ответного опорного элемента по меньшей мере в трех поступательных и трех вращательных степенях свободы. Особенно предпочтительно опорный элемент для руки посредством сочленения соединен с элементом для передачи силы с возможностью поворота вокруг по меньшей мере одной оси поворота. Указанный по меньшей мере один элемент для передачи силы расположен на ответном опорном элементе предпочтительно с возможностью движения относительно ответного опорного элемента, в частности с возможностью вращения вокруг по меньшей мере одной оси вращения. Для этого указанный по меньшей мере один элемент для передачи силы может быть закреплен, например, на ответном опорном элементе с помощью шарнира, шарового сочленения или другого сочленения или, например, одним концом элемента для передачи силы быть вставлен или введен в предусмотренный для этого карман или держатель на ответном опорном элементе.
В основе изобретения лежит тот обнаруженный факт, что, несмотря на часто сложное и трудоемкое расположение сочленений, такими ортезами и устройствами в области надплечья обладателя не могут воспроизводиться многие движения. Это относится, в частности, к таким движениям, при которых изменяется ориентация и/или положение указанного по меньшей мере одного опорного элемента для руки относительно ответного опорного элемента, и которые вызываются не или не только движением надплечья, но и, например, движениями торса, позвоночника или плечевого пояса. Эти движения, в частности, очень важны в описанных ситуациях, в которых пользователь спотыкается или падает, для остановки падения и избегания травм.
В частности, в основе лежит тот обнаруженный факт, что у известного из EP 3 156 193 A1 устройства шарнирные сочленения нуждаются в неподвижной исходной точке относительно анатомических суставов, и поэтому точки вращения неподвижно зафиксированы рамой.
Благодаря подвижности указанного по меньшей мере одного элемента для передачи силы относительно ответного опорного элемента в одном из предпочтительных вариантов осуществления устройства достигается, что устройством не ограничивается свобода движения по меньшей мере одной руки.
Если устройством не ограничивается свобода движения руки, под этим в рамках настоящего изобретения, в частности, понимается, что каждое движение, которое может выполнять пользователь устройства без устройства, возможно также вместе с устройством, так что он ограничен, во всяком случае, минимально, то есть незначительно. Эти движения включают в себя, в частности, антеверсию и ретроверсию, то есть поднятие руки вперед и назад, абдукцию и аддукцию, то есть поднятие и приведение руки в боковом направлении, и вращение внутрь и вращение наружу в плечевом суставе. В частности, вместе с предлагаемым изобретением устройством возможна циркумдукция в той же степени, в какой она возможна у соответствующего человека также без устройства. Циркумдукция представляет собой ведение руки вокруг совершаемых основных движений трех осей сустава, в частности при максимальной амплитуде движения, при которой получается неправильный конус, вершина которого лежит в плечевом суставе.
Если устройством не ограничивается свобода движения позвоночника пользователя, под этим, в частности, понимается, что возможны инклинация и реклинация. Эти движения называются также вентральным сгибанием и дорсальным разгибанием. Инклинация представляет собой наклон вперед верхней части туловища и вместе с тем позвоночника и головы, в то время как реклинация представляет собой противоположное движение. Предпочтительно устройством не ограничиваются также другие движения верхней части туловища и вместе с тем позвоночника, например, латеральное сгибание и вращение.
Предпочтительно устройство не затрудняет, не ограничивает или не делает невозможными также движения позвоночника, в частности наклон позвоночника в сторону и/или вперед и назад и/или скручивание позвоночника вокруг его продольной оси. Предпочтительно все эти описанные здесь движения не ограничиваются устройством ни по их максимальной амплитуде движения, ни по последовательности движения.
При этом повязка для руки указанного по меньшей мере одного ответного опорного элемента может двигаться по меньшей мере в трех поступательных и трех вращательных степенях свободы. В то время как устройства из уровня техники во всяком случае допускают вращательные степени свободы, с помощью предлагаемого изобретением устройства достигается также возможность движений повязки для руки относительно ответного опорного элемента, которые, например, касаются только поступательного смещения в одном из направлений пространства. При этом повязка для руки может следовать и совместно совершать движения плеча относительно ответного опорного элемента, которые происходят не только из движений надплечья, но и, например, требуют движения позвоночника или какой–либо другой части туловища.
В одном из предпочтительных вариантов осуществления устройства в соответствии с описанным здесь изобретением элемент для передачи силы имеет элемент для передачи силы давления, в частности штангу или шину, на которой с возможностью поворота вокруг оси поворота расположен опорный элемент для руки. При этом во многих случаях достаточно предусмотреть одно единственное шарнирное сочленение, имеющее ось поворота. Сложные структуры из нескольких сочленений, оси поворота которых встречаются в одной точке, предпочтительно виртуально в центре тяжести шарового сочленения природного предплечья, не нужны. Благодаря этому конструкция сильно упрощается. К тому же может снижаться стоимость изготовления.
Предпочтительно сочленение, с помощью которого опорный элемент для руки расположен на элементе для передачи силы, и ответный опорный элемент размещены над элементом для передачи силы на расстоянии друг от друга. Это расстояние соответствует эффективной длине элемента для передачи силы. При этом сочленение в надетом состоянии устройства находится примерно на высоте плечевого сустава пользователя. Ответный опорный элемент, в частности устройство сочленения ответного опорного элемента, с помощью которого элемент для передачи силы расположен на ответном опорном элементе, в надетом состоянии устройства находится предпочтительно в области таза пользователя, особенно предпочтительно на или под гребнем подвздошной кости и над тазобедренным суставом пользователя. При этом к плечевому поясу относится, в частности, лопатка пользователя. Сочленение находится предпочтительно на высоте вогнутой поверхности плечевого сустава или выше.
Предпочтительно можно реализовать для сочленения область движения, которая может проводиться мимо надплечья пользователя, так чтобы сочленение даже при экстремальных положениях рук не могло упираться в туловище пользователя. Это достигается, в частности, за счет сравнительно большого расстояния от повязки для руки опорного элемента для руки до ответного опорного элемента. Расположение ответного опорного элемента в области бедра пользователя позволяет легко воспринимать и отводить приходящие на ответную опору силы через таз. Благодаря этому предотвращено сдавливание мягких частей или ребер в верхней части туловища пользователя. Для этого ответная опора может, например, иметь тазовый ремень, с которым, в частности с помощью сочленения, соединен элемент для передачи сил.
Предпочтительно опорный элемент для руки располагает манжетой, которая в надетом состоянии устройства может соединяться с рукой пользователя. Эта манжета располагает некоторой продольной протяженностью или длиной в направлении вкладываемой руки. Середина этой продольной протяженности или длина далее называется серединой манжеты. Аналогично также повязка для руки располагает некоторой продольной протяженностью или длиной, середина которой определяет середину повязки для руки. Участок s обозначает расстояние между серединой манжеты или серединой повязки для руки, с одной стороны, и осью вращения сочленения, с помощью которой опорный элемент для руки закреплен на элементе для передачи силы. Участок a обозначает расстояние между осью вращения этого сочленения и положением, в котором элемент для передачи силы расположен на ответном опорном элементе. Кроме того, отношение a/s этих двух участков предпочтительно больше или равно 1,1, предпочтительнее больше или равно 1,3, более предпочтительно больше или равно 1,4 и особенно предпочтительно больше или равно 1,5. Кроме того, отношение a/s этих двух участков предпочтительно меньше или равно 5,0, предпочтительнее меньше или равно 3,0, более предпочтительно меньше или равно 2,5 и особенно предпочтительно меньше или равно 2,0. При наличии нескольких манжет или шин для руки для этого рассматривается самая дальняя дистально расположенная манжета или шина для руки.
Благодаря этим размерам, ввод силы в руку осуществляется с достаточно большим плечом рычага между манжетой или шиной для руки, с одной стороны, и сочленением, с другой стороны, в то время как необходимое для этого восприятие силы ответной опорой осуществляется достаточно далеко от плечевого пояса пользователя, в частности в области бедра пользователя.
Особенно предпочтительно выполненный, в частности, в виде тазового ремня ответный опорный элемент имеет обращенную к туловищу пользователя подушку, причем эта подушка предпочтительно согласована с анатомической конфигурацией тазовой кости. Подушка располагает, например, углублением для по меньшей мере частичного помещения гребня подвздошной кости (os ilium) таза. При этом предотвращается или по меньшей мере ослабляется, возможно, болезненно ощущаемое давление на выступающие части тазовой кости. Так как, благодаря согласованному исполнению контура подушки, для подушки имеется естественное особенно удобное относительное положение относительно таза, устройство может интуитивно правильно надеваться пользователем, благодаря чему облегчено пользование.
Предпочтительно ответный опорный элемент по меньшей мере частично выполнен в виде ремня, продеваемого через шлевки брюк. Благодаря этому ответный опорный элемент может крепиться на брюках пользователя. Тем самым гарантируется возможность надежного размещения ответного опорного элемента в области бедра пользователя. Для этого ответный опорный элемент может, например, выступать из места присоединения элемента для передачи силы к ответному опорному элементу, которое, в частности, образовано соединенным с ответным опорным элементом шаровым сочленением, на длину и ширину, которая позволяет вдевать ответный опорный элемент по меньшей мере в одну из передних шлевок брюк. Для этого ответный опорный элемент может на своем свободном конце иметь ширину, например, 3,0 см±1,0 см, в частности 3,5 см±0,2 см. В одном из особенно предпочтительных вариантов осуществления конец элемента для передачи силы, который соединен с ответным опорным элементом, только вставлен в карман на ответном опорном элементе. В этом случае для надевания устройства элемент для передачи силы может выниматься из кармана, так что ответный опорный элемент просто может вдеваться через шлевки брюк, пока не будет достигнуто окончательное положение. После этого элемент для передачи силы может просто вставляться в карман ответного опорного элемента.
Предпочтительно сочленение выполнено, чтобы отодвигаться от туловища пользователя для обеспечения возможности абдукции и/или аддукции руки. При этом пользователь отводит руку от туловища во фронтальной плоскости. Это приводит к тому, что увеличивается расстояние от сочленения до туловища пользователя, в частности при этом сочленение отодвигается от туловища в горизонтальном направлении, в частности в трансверсальной плоскости. При этом элемент для передачи силы поворачивается относительно ответного опорного элемента вокруг места присоединения, в котором элемент для передачи силы закреплен на ответном опорном элементе. Этот поворот осуществляется, потому что ось поворота сочленения между опорным элементом для руки и элементом для передачи силы не совпадает с осью сочленения надплечья пользователя, вокруг которой осуществляется абдукция и/или аддукция. Одновременно осуществляется предпочтительно вращение опорного элемента для руки вокруг продольной оси элемента для передачи силы.
Особенно предпочтительно расстояние от сочленения до туловища пользователя по существу максимально тогда, когда рука вытянута от туловища в горизонтальном направлении. Когда рука поднимается вверх, сочленение предпочтительно снова движется в направлении туловища. Минимальное расстояние между сочленением и туловищем пользователя предпочтительно достигается в двух конечных положениях абдукции и/или аддукции. Эти конечные положения определены упором руки в голову пользователя и упором руки в бедро пользователя. В этих конечных положениях сочленение находится на достаточном расстоянии от туловища пользователя, чтобы не давить на туловище.
Максимальное расстояние от сочленения до туловища предпочтительно подразумевает ситуацию, в которой рука вытянута в трансверсальной плоскости. При отодвигании сочленения предотвращается упор сочленения в туловище пользователя, благодаря чему улучшен комфорт ношения. Так как положения руки, в которых достигаются максимальное расстояние и минимальное расстояние от сочленения до туловища пользователя, известны, максимальное расстояние и/или минимальное расстояние может настраиваться путем выбора длин промежуточного элемента, с одной стороны, и элемента для передачи силы, с другой стороны. Если настраивается наиболее малое возможное максимальное расстояние, снижается риск непреднамеренного упора сочленения в другой предмет во время деятельности пользователя. При абдукции и/или аддукции руки сочленение может, в частности, полностью или большей частью сдвигаться в трансверсальной плоскости. Но возможно также, чтобы сочленение по меньшей мере частично сдвигалось в сагиттальной плоскости и/или во фронтальной плоскости, например, чтобы обеспечить возможность простой и механически прочной кинематики между повязкой для руки и ответным опорным элементом.
Предпочтительно сочленение, с помощью которого опорный элемент для руки соединен с элементом для передачи силы, в надетом состоянии устройства находится в области лопатки, предпочтительно на лопатке пользователя. Однако это, в частности, не означает, что сочленение в надетом состоянии находится в контакте с туловищем пользователя, а только, что этот контакт имелся бы на лопатке пользователя, если бы сочленение прижималось к туловищу пользователя.
Предпочтительно сочленение выполнено и расположено, чтобы поворачиваться в своей трансверсальной плоскости, когда рука движется в трансверсальной плоскости. Когда рука пользователя в трансверсальной плоскости выступает из туловища в сторону и поворачивается в трансверсальной плоскости вперед туловища, сочленение следует этому движению поворота в трансверсальной плоскости. Предпочтительно при этом сочленение отодвигается от плечевого пояса пользователя и обводится вокруг плечевого сустава. И это предпочтительно достигается благодаря креплению с помощью сочленения элемента для передачи силы к ответному опорному элементу. При этом элемент для передачи силы поворачивается относительно ответного опорного элемента вокруг места присоединения, в котором элемент для передачи силы прикреплен к ответному опорному элементу. Одновременно осуществляется предпочтительно вращение опорного элемента для руки вокруг продольной оси элемента для передачи силы.
Сочленение в этом предпочтительном варианте осуществления ведется по существу вдоль плечевого сустава на сравнительно небольшом расстоянии. Таким образом предотвращается упор сочленения в туловище пользователя, благодаря чему улучшен комфорт ношения. К тому же низок риск непреднамеренного упора сочленения в другой предмет во время деятельности пользователя.
Когда руки максимально далеко скрещиваются перед туловищем пользователя, сочленение находится по существу сбоку рядом с туловищем, в частности на высоте лопатки. Когда рука пользователя выступает из туловища в трансверсальной плоскости в сторону, сочленение размещено на спине туловища, в частности на высоте лопатки. При движении поворота руки в трансверсальной плоскости сочленение, в частности, полностью или большей частью поворачивается в трансверсальной плоскости по некоторой криволинейной траектории. При этом движение в трансверсальной плоскости происходит тогда, когда элемент для передачи силы стоит перпендикулярно трансверсальной плоскости.
Ответный опорный элемент при эксплуатации устройства прикладывается к предмету, на который должны передаваться действующие силы. Так как пассивный рабочий орган должен прикладывать силу к опорному элементу для руки, должна иметься соответствующая ответная опора, на которую он может опираться. Пассивный рабочий орган в смысле настоящего изобретения, в частности, не является двигателем. Необходимая энергия, которая нужна ему для приложения силы, прикладывается пользователем или обладателем устройства. Как правило, сила, которая должна прикладываться к опорному элементу для руки, прикладывается, противодействуя силе тяжести. При поднятии руки и соединенного с ней опорного элемента для руки энергия берется, следовательно, из накопителя энергии пассивного рабочего органа. При противоположном движении, то есть опускании руки, это происходит против приложенной силы. Энергия вводится в накопитель энергии пассивного рабочего органа. Для пассивного рабочего органа в смысле настоящего изобретения это единственный источник энергии, если не считать настраиваемое предварительное напряжение накопителя энергии пассивного рабочего органа.
Предпочтительно пассивный рабочий орган располагает по меньшей мере одним накопителем энергии, предпочтительно по меньшей мере одним механическим накопителем энергии. Он может иметь, например, пружинный элемент, гидроаккумулятор, пневматическую и/или гидравлическую систему и/или гидравлический накопитель энергии. Пружинный элемент может быть расположен, например, непосредственно на сочленении между элементом для передачи силы давления и опорным элементом для руки в виде пружины вращения или пружины постоянного усилия. Возможны также упругие элементы в виде упругих тросов, например, резиновых тросов, один конец которых расположен на части опорного элемента для руки. Когда опорный элемент для руки поворачивается вокруг оси поворота относительно элемента для передачи силы давления, упругий элемент растягивается или сжимается, так что энергия вводится в механический накопитель энергии или отводится из него. Разумеется, возможны и другие элементы, например, газовые пружины сжатия или пружины сжатия, для которых применяется изменение направления, чтобы делать из силы давления, созданной пружиной сжатия, силу растяжения.
Механический накопитель энергии может быть расположен в самых разных положениях устройства. Предпочтительно выбирается положение, в котором имеется необходимое для накопителя энергии конструктивное пространство, и сам накопитель энергии при движениях руки пользователя не мешает. Так, он может быть расположен, например, на плече.
В одном из предпочтительных вариантов осуществления ответный опорный элемент представляет собой накладной элемент, в частности ремень, ремешок, бандаж или элемент повязки для надевания на часть туловища, в частности торс пользователя. Накладной элемент предпочтительно интегрирован в предмет одежды, например, брюки. Альтернативно или дополнительно к этому ответный опорный элемент имеет по меньшей мере один плечевой элемент для надевания на надплечье пользователя. Альтернативно или дополнительно ответный опорный элемент располагает по меньшей мере одним элементом для контакта с полом, так что сила реакции может вводиться в пол. Такие элементы для контакта с полом предпочтительно выполнены в виде экзоскелетов и собственно известны из уровня техники. Он может быть выполнен активным, например, с приводом от двигателя, или пассивным.
Если ответный опорный элемент выполняется в виде накладного элемента для торса пользователя, в частности бедра пользователя, необходимая сила реакции может отводиться особенно удобным и комфортабельным для пользователя образом. Она вводится в туловище пользователя в области бедра и воспринимается ногами. Применение элемента для контакта с полом предпочтительно, в частности, тогда, когда устройство применяется, чтобы оказывать поддержку при поднятии тяжелых грузов. Если бы в этом случае ответный опорный элемент был выполнен в виде накладного элемента для торса, в частности бедра, пользователя, возникающая из–за тяжелого груза сильная дополнительная нагрузка, хотя и отводилась бы от области надплечья пользователя, однако должна была бы также по–прежнему отрабатываться ногами. Устранить это затруднение можно, когда применяется по меньшей мере также один элемент для контакта с полом. При этом можно отводить в пол по меньшей мере некоторую часть нагрузки, однако предпочтительно всю дополнительную нагрузку, так чтобы и ноги и, в частности, колена пользователя не перегружались. Для этого могут применяться ортезы, например, активные или пассивные экзоскелеты, которые принципиально известны из уровня техники, распространяющиеся от бедра через колено и щиколотку до стопы пользователя.
Применение плечевого элемента для надевания на надплечье, который может быть выполнен, например, в виде лямок рюкзака или лямок брюк, позволяет получить особенно малую конструктивную форму устройства. Однако оно имеет тот недостаток, что, отводимые собственно от области надплечья силы вводятся в область надплечья в другом месте, так что по сравнению с применением другого ответного опорного элемента эффект снижается. Разумеется, и здесь ответный опорный элемент может представлять собой гибкий или жесткий элемент, который должен располагаться на надплечье или на другой части человеческого туловища, в частности торса пользователя.
Выяснилось, что предпочтительно, когда ориентация элемента для передачи силы относительно ответного опорного элемента может изменяться движением торса пользователя и/или движением руки. При этом изменении ориентации, например, направления продольной протяженности или углового положения элемента для передачи силы относительно ответного опорного элемента, могут осуществляться множество, предпочтительно даже все движения и степени свободы, которые не могут производиться при расположении с возможностью поворота опорного элемента для руки на элементе для передачи силы давления. Так как изменение ориентации производится просто движением торса и/или руки пользователя, обеспечено интуитивное обслуживание. Предпочтительно элемент для передачи силы давления соединен с накладным элементом посредством сочленения, в частности шарового сочленения или шарнира. Точный вариант осуществления этого сочленения зависит от цели применения и конкретных условий, в частности также индивидуальных предпочтений и вкусов пользователя. Может применяться шаровое сочленение, которое допускает поворот выполненного, например, в виде штанги или стержня элемента для передачи силы давления относительно накладного элемента, выполненного, например, в виде ремешка или ремня. При таком сочленении может быть допустимо также скручивание, то есть вращение элемента для передачи силы давления вокруг своей собственной продольной оси. Однако в данном случае достаточно предусмотреть простое шарнирное сочленение, с помощью которого элемент для передачи силы давления расположен на накладном элементе. Этого достаточно, в частности, тогда, когда гибкость накладного элемента столь велика, что все же возможно движение элемента для передачи силы давления относительно накладного элемента, которое приводит к деформации накладного элемента. Так как сам накладной элемент выполнен в виде гибкого элемента, при соответствующем движении руки и/или торса пользователя эта деформация снова устраняется. Таким образом и в этом месте достигнуто наиболее простое возможное соединение между элементом для передачи силы давления и накладным элементом.
Сочленение, с помощью которого элемент для передачи силы давления расположен на опорном элементе для руки, может быть выполнено различным образом. Оно может быть выполнено в виде сдвижного или цепного сочленения или в виде откидного механизма. В качестве сочленения и одновременно по меньшей мере также в качестве механического накопителя энергии могут также применяться упругие элементы, например, изгибные пружины. Разумеется, может также применяться принцип Боудена, например, в виде вилки сжатия–растяжения.
Опорный элемент для руки располагает повязкой для руки, которая предпочтительно расположена на промежуточном элементе. Этот промежуточный элемент, как часть опорного элемента для руки, предпочтительно соединен с элементом для передачи силы давления или элементом для передачи силы. При этом длины выполненного, например, в виде шины или стержня элемента для передачи силы давления и в данном случае также выполненного в виде стержня или шины промежуточного элемента выбраны предпочтительно так, что покрывается весь угловой диапазон возможного движения плеча обладателя. Повязка для руки предпочтительно расположена на промежуточном элементе с помощью сочленения для достижения наибольшего возможного комфорта ношения.
В одном из предпочтительных вариантов осуществления пассивный рабочий орган предназначен для приложения силы в зависимости от положения и/или ориентации указанного по меньшей мере одного опорного элемента для руки относительно ответного опорного элемента, в частности в зависимости от угла поворота опорного элемента для руки вокруг оси поворота, при этом пассивный рабочий орган прикладывает силу к опорному элементу для руки предпочтительно эксцентрически. Предпочтительно сила прикладывается к промежуточному элементу опорного элемента для руки. Вместо, например, пружины постоянного усилия в качестве пассивного рабочего органа, с помощью которой, независимо от положения и углового положения плеча и вместе с тем также опорного элемента для руки, прикладывается всегда одинаковая сила, могут применяться пассивные рабочие органы, с помощью которых, в зависимости от положения и/или ориентации руки и вместе с тем опорного элемента для руки, могут прикладываться различные силы. Так, например, предпочтительно не прикладывать силу, если рука не превышает определенный угол относительно нормали, то есть направления, следующего силе тяжести. Этот угол может быть, например, 45°, 60° или 90°. Только когда рука поднимается за пределы этого угла, пассивным рабочим органом предпочтительно прикладывается сила, которая направлена противоположно силе тяжести. Эта сила может варьироваться с дальнейшим поднятием, то есть поворотом, плеча и вместе с тем опорного элемента для руки относительно элемента для передачи силы давления. Для этого могут применяться кулачковые диски, передачи или другие функции сила–перемещение, например, кулисы. Максимальная сила прикладывается предпочтительно в угловом диапазоне от 70° до 120°, особенно предпочтительно при 90°.
Предпочтительно прикладываемая пассивным рабочим органом сила может изменяться путем изменяемого предварительного напряжения пассивного рабочего органа и/или настраиваемого эксцентриситета приложения силы к опорному элементу для руки.
В одном из предпочтительных вариантов осуществления элемент для передачи силы установлен в направляющей, которая препятствует удалению части элемента для передачи силы, на которой расположен опорный элемент для руки, от торса пользователя в надетом состоянии устройства. Эта направляющая в одном из конструктивно особенно простых вариантов осуществления представляет собой петлю или втулку, которые предпочтительно изготовлены из текстиля. Направляющая служит предпочтительно приспособлением для размещения. Движение элемента для передачи силы относительно направляющей предпочтительно, но не является необходимым.
Особенно предпочтительно устройство располагает двумя опорными элементами для руки для опирания обеих рук, причем эти два опорных элемента для руки имеют каждый собственную повязку для руки и предпочтительно расположены каждый с возможностью поворота на собственном элементе для передачи силы, и между этими элементами для передачи силы предпочтительно расположен по меньшей мере один соединительный элемент, с помощью которого предпочтительно к обоим элементам для передачи силы может прикладываться сила растяжения. Это также препятствует удалению элементов для передачи силы обращенным от ответного опорного элемента концом слишком далеко от туловища, в частности от торса пользователя.
Если устройство представляет собой устройство для поддерживания двух рук пользователя, устройство имеет два опорных элемента для руки, имеющие по повязке для руки для надевания на каждую руку, по меньшей мере один пассивный рабочий орган, который предназначен для приложения силы по меньшей мере к одному из опорных элементов для руки, и по меньшей мере одну ответную опору для прилагаемой силы, которая имеет по меньшей мере один ответный опорный элемент и по меньшей мере два элемента для передачи силы, предназначенных для того, чтобы передавать силу реакции от каждого из опорных элементов для руки на ответный опорный элемент. Предпочтительно устройство располагает в этом случае двумя пассивными рабочими органами, каждый из которых предназначен для приложения силы к одному из опорных элементов для руки.
Особенно предпочтительно оба элемента для передачи силы независимо друг от друга могут двигаться относительно ответного опорного элемента. Тем самым достигается возможность следовать различным движениям, которые выполняет пользователь своими обеими руками. Жесткая связь между элементами для передачи силы предпочтительно не осуществляется. Поэтому оба сочленения, которые могут соединять два опорных элемента для руки с двумя элементами для передачи силы, могут, в частности, удаляться друг от друга или придвигаться друг к другу, когда этого требуют движения рук.
Предпочтительно область поворота сочленения может ограничиваться упором. Предпочтительно этим упором ограничивается движение опорного элемента для руки относительно элемента для передачи силы вокруг оси поворота. Предпочтительно устройство располагает двумя упорами для ограничения движения каждого опорного элемента для руки вокруг оси поворота относительно каждого элемента для передачи силы. Таким образом предотвращается, например, возникновение переворота различных конструктивных элементов друг относительно друга после перехода за отвесную линию.
Предпочтительно упор может приводиться в активное положение, в котором он ограничивает движение, и в пассивное положение, в которой он не ограничивает положение. В частности, упор может фиксироваться, предпочтительно арретироваться в активном и/или в пассивном положении. Это позволяет предусматривать различную меру свобод движения для хранения устройства, надевания и снятия устройства и/или для использования устройства. Высокая мера свободы движения может облегчать хранение и/или транспортировку устройства при наименьшем возможном объеме упаковки. Низкая мера свободы движения может, например, при надевании и снятии устройства предотвращать неблагоприятные относительные положения, которые, например, могли бы возникать вследствие предварительного напряжения пассивного рабочего органа.
Особенно предпочтительно упор представляет собой выступ на элементе для передачи силы. Соединенная с опорным элементом для руки часть сочленения, например, выступающий уступ, после прохождения предусмотренного максимального диапазона поворота может автоматически упираться в упор элемента для передачи силы. В одном из вариантов осуществления настоящего изобретения элемент для передачи силы вращается вокруг своей продольной оси, чтобы приводить выступ в активное или пассивное положение. Намеренное вращение присоединенного к сочленению конца элемента для передачи силы может включать или выключать функциональность упора.
В частности, элемент для передачи силы имеет соединенную с сочленением верхнюю отдельную часть и соединенную с ответным опорным элементом нижнюю отдельную часть, при этом упор образован верхней отдельной частью, и верхняя отдельная часть выполнена с возможностью фиксации с сочленением в разных относительных угловых положениях. При этом верхняя отдельная часть связана с сочленением таким образом, что она не может вращаться вокруг своей продольной оси. Однако эта жесткая связь может прекращаться для крепления верхней отдельной части в относительном угловом положении, повернутом вокруг ее продольной оси относительно сочленения. Благодаря этому повернутому креплению верхней отдельной части к сочленению осуществляется предпочтительно также относительное движение упора относительно сочленения. Благодаря этому в этом варианте осуществления упор движется между активным положением и пассивным положением. Нижняя отдельная часть предпочтительно связана с ответным опорным элементом с возможностью вращения, при этом верхняя отдельная часть и нижняя отдельная часть при нормальной эксплуатации соединены друг с другом без возможности вращения, чтобы обеспечивать возможность поворота сочленения вокруг месте присоединения элемента для передачи силы к ответному опорному элементу. Чтобы привести упор в активное и/или пассивное положение, верхняя отдельная часть может поворачиваться относительно сочленения и нижней отдельной части. Для этого, например, должно преодолеваться трение, предусмотренное между верхней отдельной частью и нижней отдельной частью, которое может с фрикционным замыканием фиксировать упор в активном положении и/или в пассивном положении. Дополнительно или альтернативно предпочтительно имеется управляемое фиксирующее устройство, например, разъемное стопорное устройство, которое в разъединенном состоянии допускает возможность вращения верхней отдельной части, а в замкнутом состоянии блокирует вращение верхней отдельной части с фрикционным замыканием и/или с геометрическим замыканием.
Предпочтительно верхняя отдельная часть для сдвигания упора в продольном направлении элемента для передачи силы между активным положением и пассивным положением связана с нижней частью подобно винту. Верхняя отдельная часть связана с нижней отдельной частью, например, с помощью винтовой резьбы, так что при относительном движении верхней отдельной части относительно нижней отдельной части элемент для передачи силы может телескопически двигаться настолько, что упор может сдвигаться между своим активным положением и своим пассивным положением по меньшей мере при некоторой доле движения в продольном направлении элемента для передачи силы.
В частности, для случая двух опорных элементов для руки и двух элементов для передачи силы они могут располагаться, например, также плоскостно, например, в виде креста. Также могут применяться несколько опор или пружин, упругих или механических накопителей энергии или прочих элементов для передачи силы или для приложения силы. При плоскостном расположении, с одной стороны, достигается меньшее сковывание устройством в надетом состоянии, так что оно мало мешает при ежедневной работе. С другой стороны, достигается скорейшее следование элементов для передачи силы движениям торса пользователя.
Предпочтительно устройство может приспосабливаться к различным размерам туловища пользователя. Таким образом устройство может применяться разнообразно и гибко, без необходимости наличия различных устройств для пользователей различного размера. При этом, например, длина элемента для передачи силы, в частности в виде элемента для передачи силы давления, может быть приспосабливаемой, например, когда применяются телескопические штанги. Они могут, например, располагать быстродействующими зажимами или арретирами вращения, так что они могут легко отпираться, переставляться по длине и снова запираться. Это происходит предпочтительно бесступенчатым образом. Но возможна и ступенчатая настройка. Так, например, могут иметься стопорные сверления, в которых застопоривается подпружиненный изнутри штырь, когда настроена желаемая длина. Для перестановки длины штырь вдавливается в телескопическую штангу, и несколько элементов телескопической штанги смещаются друг относительно друга.
Разумеется, таким образом может также переставляться по длине промежуточный элемент опорного элемента для руки. И здесь может применяться телескоп или телескопическая штанга. Альтернативно или дополнительно к этому повязка для руки может быт выполнена скользящей по или внутри промежуточного элемента для осуществления компенсации конгруэнтности. При определенных движениях плеча относительно надплечья в этом случае происходит движение повязки для руки относительно промежуточного элемента, так что повязка для руки всегда приходит в контакт с рукой пользователя в одной и той же области.
Альтернативно телескопической штанге на плесе для настройки длины и направления могут также применяться ввернутые друг в друга спирали или опоры вращения.
Сочленение, с помощью которого элемент для передачи силы расположен на накладном элементе, может быть расположено на данном накладном элементе предпочтительно неподвижно. Если он выполнен в виде ремня или ремешка, его длина может просто настраиваться, благодаря чему появляется также возможность настройки положения сочленения. Сочленение, например, выполненное в виде клипса, альтернативно или дополнительно к этому может быть также разъемно соединяемым или соединенным с накладным элементом. Альтернативно или дополнительно к этому оно может быть выполнено с возможностью смещения по шине, кулисе или другому контуру смещения. Другими возможностями является расположение в кармане ремня, связь сочленения через так называемый храповой замок, который известен, например, по лыжным ботинкам, в виде штыревого замка или с помощью иппликаторной застежки.
Особенно просто подходящий размер устройства может находиться, когда устройство интегрировано в предмет одежды, в частности куртку или рубашку. В частности, накладной элемент предпочтительно интегрирован в брюки. Тогда надо только найти подходящий пошивочный размер для пользователя, так чтобы могли выбираться предметы одежды подходящего размера.
Так как для пользователей различного размера и различной комплекции пассивным рабочим органом должны прикладываться различной величины силы, оказалось предпочтительно, когда величина прикладываемой силы может настраиваться. Это может происходить, например, когда может настраиваться предварительное напряжение пружинного элемента, например, винтовой пружины, например, с помощью вращающегося колеса или механизма смещения. Также может настраиваться длина ненапряженной пружины, то есть длина пружины без нагрузки. Альтернативно или дополнительно к этому могут иметься несколько ветвей пружины или пружинных элементов, которые могут активироваться по отдельности или вместе и при необходимости, но не обязательно, имеют различные коэффициенты упругости и жесткости. Длина плеча рычага, на котором прилагаемая пассивным рабочим органом сила воздействует на опорный элемент для руки, в частности на промежуточный элемент опорного элемента для руки, тоже может настраиваться и, например, изменяться с помощью регулировочного винта. То же самое относится к прикреплению троса Боудена. Настройка может производиться механическим или мехатронным способом, например, с помощью двигательного привода. Возможность мехатронной настройки предпочтительна, например, тогда, когда прикладываемая сила должна быть адаптивно приспосабливаемой, например, когда при удерживании предмета, например, инструмента, становится необходима или желательна более высокая поддерживающая сила.
Оказалось, что особенно предпочтительно, когда пружинные элементы и другие механические, гидравлические или пневматические накопители энергии напрягаются только при надевании устройства. Дополнительно они могут возвращаться в ненапряженное состояние при снятии. Это может происходить, например, с помощью рычагов, петель или разъемных зажимных соединений, которые соединены с данными пружинными элементами и позволяют напрягать пружину при необходимости до желаемой степени. Альтернативно или дополнительно к этому могут иметься движки, на которых, например, расположен один конец пружинного элемента. При смещении движка по направляющему элементу пружина или пружинный элемент может напрягаться или возвращаться в ненапряженное состояние. Арретирование и фиксация в определенном положении осуществляется предпочтительным образом путем установки наискосок движка на направляющем элементе.
Особенно предпочтительно повязка для руки представляет собой самозастегивающуюся повязку, которая расстегнута, пока в ней не находится рука. Когда рука вводится в повязку, срабатывает приводной механизм, с помощью которого повязка застегивается. Одновременно с помощью этого механизма могут напрягаться пружинные элементы.
Предпочтительно устройство располагает блокировочным устройством, с помощью которого, предпочтительно полностью, может блокироваться движение опорного элемента для руки относительно элемента для передачи силы по меньшей мере в одном направлении.
Предпочтительно между опорными элементами для руки находится по меньшей мере один элемент растяжения, в частности по меньшей мере одна пружина растяжения. Благодаря этому на каждый из двух опорных элементов для руки действует сила растяжения в направлении соответственно другого опорного элемента для руки. Тем самым неожиданным образом достигается, что элементы для передачи силы даже при сложных и необычных движениях обладателя устройства не удаляются от торса обладателя. Тем самым достигается уменьшение опасности столкновения конструктивных элементов устройства, например, с предметами или дверными рамами, что снизило бы приемлемость устройства. К тому же таким образом может предотвращаться или по меньшей мере уменьшаться слишком сильное смещение опорных элементов для руки вследствие неконгруэнтностей между частями устройства и частями туловища пользователя, которых нельзя избежать полностью.
Предпочтительно по меньшей мере одна из оболочек для руки, а предпочтительно обе повязки для руки, располагают застегивающим элементом, который, в частности, может быть выполнен в виде ремня. С помощью этого застегивающего элемента повязка для руки может застегиваться вокруг руки. Ремень может, например, накладываться вокруг руки и с помощью крепежного элемента, который может быть расположен на свободном конце ремня и, например, выполнен в виде иппликаторной застежки, крепиться к противоположному концу повязки для руки. Разумеется, возможны и другие вилы крепления, например, пряжка, элемент геометрического замыкания, например, в виде нажимной кнопки, или другие застегивающие элементы.
Предпочтительно застегивающий элемент посредством по меньшей мере одного крепежного элемента может крепиться к элементу устройства, отличающемуся от повязки для руки. Причем этот другой элемент предпочтительно представляет собой плечевой ремень или элемент для передачи силы или оболочку одного из этих элементов для передачи силы или ответный опорный элемент. Если в этом случае обладатель устройства должен снять устройство, он должен сначала разъединить застегивающий элемент, чтобы иметь возможность вынуть свою руку из повязки для руки. В этот момент существует обусловленная конструкцией опасность того, что при вынимании руки из повязки для руки прикладываемая рукой к опорному элементу для руки сила уменьшится, в то время как сила, прикладываемая пассивным рабочим органом, остается прежней. В этом случае может произойти очень быстрое, например, рывковое движение опорного элемента для руки вверх, что может привести к травмам или повреждениям окружающих оборудования или предметов. Однако если повязка для руки застегнута застегивающим элементом, должен сначала разъединяться застегивающий элемент, чтобы можно было вынуть руку из повязки для руки. Следовательно, обладатель устройства держит один конец застегивающего элемента в руке и таким образом может продолжать прикладывать действующую вниз силу к повязке для руки и вместе с тем к опорному элементу для руки. Застегивающий элемент в этом случае предпочтительно расположен на другом элементе устройства, например, плечевом ремне. Устройство таким образом контролируется и при необходимости медленно приводится в своего рода «положение парковки» без возникновения рывкового движения.
При надевании такого устройства поступают наоборот. Обладатель устройства, который хочет надеть устройство, сначала отсоединяет застегивающий элемент от другого элемента устройства и может таким образом уже прикладывать силу к опорному элементу для руки, чтобы приводить его в желаемое для надевания положение. При этом он предпочтительно не должен отпускать застегивающий элемент, пока рука находится в повязке для руки. После этого застегивающий элемент застегивается вокруг руки, и устройство надежно надето.
Предпочтительно ответный опорный элемент располагает ремнем, застегиваемым застежкой, который может накладываться вокруг торса обладателя. Такое ремень представляет собой самостоятельное изобретение и применим отдельно или как часть устройства, в частности как часть ортеза или протеза. Так, такой ремень может также накладываться вокруг другой части туловища обладателя устройства или предмета. Такой ремень предпочтителен, например, всегда тогда, когда в застегнутом состоянии на ремень действует напряжение, так что ошибочное расстегивание ремня приводило бы к рывковому и неконтролируемому снятию этого напряжения. При этом речь идет, например, о набедренном или надеваемом на живот ремне. При этом застежка выполнена так, что для расстегивания и застегивания застежки необходимы по меньшей мере два этапа. Если в качестве застежки применяется, например, только защелкивающаяся застежка, которая, например, может разъединяться при задействовании одного или двух элементов управления, существует опасность, что вследствие действующих со стороны рабочих органов сил концы ремня будут двигаться с ускорением друг от друга, чтобы удариться об окружающие предметы или людей. Чтобы предотвратить это, застежка выполнена двухступенчатой.
Предпочтительно один конец ремня должен продеваться через расположенную на другом конце проушину, прежде чем будет создано геометрическое замыкание двух ответно выполненных элементов геометрического замыкания для застегивания застежки. При этом предпочтительно один из двух элементов геометрического замыкания находится на конце, который продевается через проушину. Для расстегивания застежки должно сначала разъединяться геометрическое замыкание, а затем один из концов ремня продеваться через указанную проушину, причем через проушину снова проводится этот один элемент геометрического замыкания.
Предпочтительно пассивный рабочий орган располагает по меньшей мере одним упругим элементом, а устройство по меньшей мере одним накладным элементом, который при предопределенном угле между опорным элементом для руки и элементом для передачи силы прилегает к упругому элементу и таким образом изменяет силу, прикладываемую к опорному элементу для руки. Упругий элемент при движении опорного элемента для руки относительно элемента для передачи силы создает силу, так как он растягивается или сжимается. Предпочтительно опорный элемент установлен с возможностью вращения относительно элемента для передачи силы, и точка воздействия прикладываемой упругим элементом силы расположена эксцентрически относительно оси вращения соответствующего сочленения. Поэтому при повороте опорного элемента для руки относительно элемента для передачи силы изменяется направление силы, прикладываемой упругим элементом. При этом накладной элемент, который предпочтительно расположен на сочленении, расположен, в частности, так, что при предопределенном угле он приходит в контакт с упругим элементом. С этого момента действующая на точку воздействия сила определяется уже не из направления между точкой воздействия и второй точкой опоры упругого элемента, а направлением между точкой воздействия и той точкой, в которой накладной элемент прилегает к упругому элементу. В этой точке как можно ближе к оси вращения, предпочтительно точно на оси вращения, сила, которая прикладывается частью упругого элемента, будет проходить почти или точно по оси, так что на опорную часть для руки больше не действует вращающий момент. Эта сила может настраиваться путем смещения или изменения положения накладного элемента.
Предпочтительно поэтому предопределенный угол и/или изменение прикладываемой силы может настраиваться, когда предпочтительно накладной элемент может смещаться относительно опорного элемента для руки и/или элемента для передачи силы. Это может происходить, например, когда накладной элемент может смещаться в кулисе и, например, может фиксироваться винтом. Альтернативно или дополнительно к этому накладной элемент может быть выполнен также в виде эксцентрика.
Изобретение решает поставленную задачу с помощью устройства согласно ограничительной части п.16 формулы изобретения, которая отличается тем, что опорный элемент для руки соединен с элементом для передачи силы с помощью сочленения. В одном из предпочтительных вариантов осуществления это, наряду с расположением с помощью сочленения элемента для передачи силы на ответном опорном элементе, единственное сочленение, которое необходимо для движения повязки для руки.
Предпочтительно это сочленение устроено и выполнено таким образом, что в надетом состоянии устройства допускается абдукция и/или аддукция руки пользователя. Это движение соответствует подъему в сторону или, соответственно, опусканию руки во фронтальной плоскости. Это движение не ухудшается устройством и, в частности, сочленением.
Предпочтительно сочленение и ответный опорный элемент находятся друг от друга на расстоянии элемента для передачи силы. При этом в надетом состоянии устройства сочленение предпочтительно расположено в области надплечья пользователя, особенно предпочтительно на высоте лопатки или выше. Дополнительно или альтернативно этому ответный опорный элемент предпочтительно расположен в области таза пользователя, предпочтительно на тазе пользователя, более предпочтительно на или под гребнем подвздошной кости и над тазобедренным суставом пользователя. Эти места расположения сочленения и ответного опорного элемента считаются предпочтительными для всех описанных здесь вариантов осуществления.
В одном из предпочтительных вариантов осуществления в надетом состоянии устройства ответный опорный элемент сдвинут в сторону от позвоночника пользователя. Этот сдвиг составляет предпочтительно по меньшей мере пять сантиметров, если смотреть от середины позвоночника.
В одном из предпочтительных вариантов осуществления настоящего изобретения устройство, которое снабжено только одним опорным элементом для руки, выполнено таким образом, что оно может применяться как для поддерживания правой руки, так и для поддерживания левой руки. Для этого элемент для передачи силы и при необходимости также пассивный рабочий орган может отсоединяться. Это возможно особенно просто, когда элемент для передачи силы только вставлен в карман ответного опорного элемента и поэтому моет легко выниматься. На элементе для передачи силы расположены предпочтительно другие конструктивные элементы, которые необходимы для поддерживания этой одной руки. При этом они тоже снимаются с ответного опорного элемента. Тогда элемент для передачи силы вставляется в другой карман ответного опорного элемента или крепится в другом месте ответного опорного элемента и так может применяться для поддерживания другой руки. Для этого элемент для передачи силы и предпочтительно все непосредственно или опосредствованно закрепленные на нем конструктивные элементы выполнены симметрично, чтобы иметь возможность применяться для правой и для левой руки.
Пассивный рабочий орган предпочтительно одним концом расположен на элементе для передачи силы или на ответном опорном элементе, а другим концом воздействует на некоторую часть опорного элемента для руки, например, расположенный на нем рычаг для воздействия силы. Однако, разумеется, и для определенных случаев применения предпочтительно, чтобы пассивный рабочий орган одним концом воздействовал на опорный элемент для руки, а другим концом на рычаг для воздействия силы, который без возможности вращения соединен с элементом для передачи силы. И в этом случае рабочий орган предназначен для приложения поддерживающей силы к опорному элементу для руки.
С помощью прилагаемых чертежей ниже подробнее поясняется один из примеров осуществления настоящего изобретения. Показано:
фиг.1: схематичное изображение устройства по первому примеру осуществления настоящего изобретения в надетом состоянии;
фиг.2–6: изображение надетого устройства в различных положениях на виде сбоку;
фиг.7–9: изображения надетого устройства на виде в плане сверху;
фиг.10: схематичное изображение устройства по другому примеру осуществления настоящего изобретения;
фиг.11: схематичное изображение фрагмента устройства;
фиг.12–15: схематичные изображения устройств по другим примерам осуществления настоящего изобретения;
фиг.16 и 17: примерные изображения характеристик изменения силы;
фиг.18: схематичное изображение надетого устройства;
фиг.19 и 20: схематичные изображения отдельных элементов устройства;
фиг.21: разные этапы разъединения ремня;
фиг.22 и 23: разные виды упоров;
фиг.24–26: разные способы настройки прикладываемой силы и
фиг.27–29: другие варианты осуществления изобретения.
На фиг.1 показан пользователь 2, который носит устройство для поддерживания руки 4. Устройство располагает опорным элементом 6 для руки, который имеет промежуточный элемент 8 и повязку 10 для руки. Своим дистальным концом опорный элемент 6 для руки посредством манжеты 12 расположен на руке 4.
Устройство располагает, кроме того, ответной опорой 14, которая имеет ответный опорный элемент 16 и элемент 18 для передачи силы. Промежуточный элемент 8 опорного элемента 6 для руки посредством сочленения 20 расположен на верхнем на фиг.1 конце элемента 18 для передачи силы. Он выполнен, например, в виде штанги. В показанном примере осуществления элемент 18 для передачи силы представляет собой телескопическую штангу. Элемент 18 для передачи силы своим нижним концом в показанном примере осуществления посредством шарового сочленения 22 расположен на ответном опорном элементе 16. Ответный опорный элемент 16 служит для того, чтобы передавать возникающие силы в устойчивый элемент. Он может прилегать к полу, какому–либо предмету или какой–либо части туловища. В показанном примере осуществления ответный опорный элемент 16 представляет собой набедренный ремень, которые прилегает к пользователю 2 в области бедер. Посредством устройства 24 для настройки может настраиваться длина ответного опорного элемента 16. Это предпочтительно, с одной стороны, для комфорта пользователя 2, а с другой стороны, для как можно более точного размещения шаровых сочленений 22 на туловище пользователя 2.
Показанное на фиг.1 устройство располагает, к тому же, пассивным рабочим органом 26, который в показанном примере осуществления выполнен в виде пружины растяжения. Нижний на фиг.1 конец пассивного рабочего органа 26 расположен на элементе 18 для передачи силы, в то время как противоположный конец воздействует на рычажный элемент 28 промежуточного элемента 8 опорного элемента 6 для руки. Пассивным рабочим органом 26 к рычажному элементу 28 и вместе с тем к промежуточному элементу 8 опорного элемента 6 для руки прикладывается сила, которая противодействует силе тяжести и поддерживает руку 4 пользователя 2.
Показанное на фиг.1 устройство располагает двумя опорными элементами 6 для руки, двумя ответными опорами 14 и двумя пассивными рабочими органами 26, из которых для ясности был описан только один.
На фиг.2–6 показано устройство по одному из примеров осуществления настоящего изобретения в надетом состоянии, при этом пользователь 2 выполнил различные движения. На фиг.2 показан пользователь, стоящий в ненапряженном состоянии, в то время как на фиг.3 можно видеть пользователя 2 с широко разведенными руками. Данная повязка 10 для руки зафиксирована на руке посредством манжеты 12 и образует вместе с промежуточным элементом 8 опорный элемент 6 для руки. Он соединен посредством сочленения 20 с элементом 18 для передачи силы, при этом соответствующие элементы 18 для передачи силы расположены на ответном опорном элементе 16 в виде набедренного ремня. На сочленении 20 находится рычажный элемент 28, на который воздействует пассивный рабочий орган 26.
На фиг.2 у стоящего в ненапряженном состоянии можно отчетливо видеть, что сочленение 20 удаляется от туловища пользователя 2 назад. Если пользователь 2, как изображено, широко разведет руки, данное сочленение 20 сместится к туловищу пользователя 2. Сочленение 20 находится в показанном примере осуществления в области плечевого сустава. Устройство располагает, к тому же, двумя плечевыми ремнями 30, с помощью которых устройство удерживается на туловище. Они не служат для удерживания сочленения 20 на предопределенном расстоянии от туловища.
На фиг.4 показано дальнейшее по сравнению с фиг.3 поднятие рук. К тому же руки на фиг.4 и 5 ведутся дальше вперед от пользователя 2. Видно, что два сочленения 20 удаляются друг от друга и, в частности, не соединены с плечевыми ремнями 30, чтобы удерживаться на предопределенном расстоянии. Сочленения 20, а также элементы 18 для передачи силы и промежуточные элементы 8, которые соединяются друг с другом сочленениями 20, движутся, более того, наружу и обладают возможностью почти совершенно свободного движения. Видно, что устройство обходится без сложных механизмов псевдосочленений или жестких шинных систем. В то время как сочленения 20 на фиг.3 и 4 еще находятся позади туловища пользователя 2 в области лопатки, на фиг.5 за счет одного только движения туловища они перешли в стороны от пользователя 2 и так могут следовать движению. На фиг.6 изображенное на фиг.5 положение показано на виде сбоку. Руки 4 пользователя 2 скрещиваются, а сочленения 20 находятся на показанном изображении на фиг.6 рядом с надплечьем пользователя 2. Одновременно шаровые сочленения 22, с помощью которых элемент 18 для передачи силы расположен на ответном опорном элементе 16, не изменились. Положение этих шаровых опор 22 остается неизменным независимо от движения рук 4 пользователя 2. Такая свобода движения при таких низких конструктивных издержках едва ли возможна с помощью устройств из уровня техники.
На фиг.7–9 показаны разные положения пользователя 2 и его рук 4 на виде в плане. На фиг.9 руки широко разведены и через положения на фиг.7 и 8 ведутся вперед, пока они не скрещиваются на фиг.8. Видно, что сочленения 20 от фиг.9 через фиг.7 к фиг.8 переходят наружу и при этом все ближе прилегают к туловищу пользователя 2.
На фиг.10 показано схематичное изображение устройства по одному из примеров осуществления. Видны промежуточные элементы 8, которые посредством сочленений 20 соединены с элементами 18 для передачи силы. В отличие от примеров осуществления, показанных на фиг.2–9, между двумя элементами для передачи силы теперь находится соединительный элемент 32, который в показанном примере осуществления выполнен в виде упругого ремня. С помощью пряжки 34 может настраиваться длина ремня, так что может настраиваться прикладываемая сила растяжения.
Также изображены два плечевых ремня 30, с помощью которых устройство 1 может располагаться на туловище пользователя 2. Не изображен ответный опорный элемент. Он показан на фиг.11. Он включает в себя другой ремень 36, который на обращенной к туловищу стороне располагает подушкой 38 для достижения наибольшего возможного комфорта ношения. Элемент 18 для передачи силы вставлен в предусмотренный для него карман 40 и может в нем поворачиваться, так что выполняется функция шарового сочленения. Этим конструктивно простым образом можно обойтись без сложных систем сочленений.
На фиг.15 показано схематичное изображение, на котором устройство было интегрировано в предмет одежды, в настоящем случае футболку. Ответный опорный элемент 16 состоит теперь из двух плечевых элементов, которые посредством элементов 18 для передачи силы и соответствующих сочленений 20 соединены с промежуточными элементами 8 и повязками 10 для руки. Благодаря тому, что устройство интегрировано в футболку, оно может особенно легко надеваться и сниматься, так что не нужны никакие сложные приемы. Благодаря этому возрастает приемлемость устройства.
На фиг.13 показан экзоскелет 42, имеющий разные шины и сочленения, с помощью которых сила от набедренного элемента 44 может вводиться в предусмотренные для этого элементы 46 для контакта с полом.
На фиг.14 показано схематичное изображение другого варианта осуществления сочленения 20. Поворотный рычаг 48 соединяет промежуточный элемент 8 и элемент 18 для передачи силы, верхний на фиг.14 конец которого расположен с возможностью смещения в не показанном продолговатом отверстии или кулисе. При этом при повороте точка сочленения элемента 18 для передачи силы с поворотным рычагом 48 смещается в направлении двойной стрелки 50. Поэтому изменяется также длина рычажного элемента 28, так что сила, приложенная пассивным рабочим органом 26, тоже изменяется.
На фиг.15 показан другой вариант осуществления, при котором, в отличие от прежних вариантов осуществления, пассивный рабочий орган 26 расположен не между рычажным элементом 28 и элементом 18 для передачи силы, а между рычажным элементом 28 и промежуточным элементом 8. С помощью ответного натяжителя 52, положение которого на элементе 18 для передачи силы может смещаться по двойной стрелке 50, к пассивному рабочему органу 26 прикладывается предварительное напряжение.
На фиг.16 и 17 показаны различные характеристики изменения сил, которые могут прикладываться к руке устройством по примерам осуществления настоящего изобретения. По оси X нанесен угол антеверсии. Антеверсия представляет собой поднятие руки в сагиттальной плоскости, то есть в настоящем примере вперед. 0° соответствуют расслабленно висящей вниз руке. На фиг.16 видно, что сила вообще прикладывается, только начиная с предопределенного угла. По оси Y нанесено отношение вращающих моментов. Вращающий момент, вызванный собственным весом руки и силой веса, был разделен на вращающий момент, прикладываемый устройством.
Разные характеристики изменения сил могут настраиваться почти индивидуально и в показанном примере осуществления были созданы одним единственным пассивным рабочим органом 26, который предварительно напряжен в различной мере. В то время как пунктирная линия была создана пассивным рабочим органом 26, который почти не имеет предварительного напряжения, предварительное напряжение по штриховой линии и сплошной линии увеличивается.
На фиг.17 тоже показана прикладываемая к руке сила в зависимости от угла антеверсии, причем теперь, однако, предварительное напряжение рабочего органа остается неизменным. Вместо этого смещается точка сочленения, через которую рабочий орган 26 передает сою силу на опорный элемент 6. При этом расстояние от точки сочленения для силы до точки вращения сочленения 20 от пунктирной линии через штриховую линию к сплошной линии увеличивается. Видно, что и таким образом может достигаться повышение силы в широком угловом диапазоне, однако, в частности при больших углах, начиная прибл. с 150°, возникает характеристика изменения, заметно отличающаяся от характеристик изменения, изображенных на фиг.16.
На фиг.18 показано устройство в почти надетом состоянии. Ответный опорный элемент 16 в виде набедренного ремня еще не расстегнут, в то время как повязки 10 для руки уже застегнуты застегивающим элементом 54 вокруг руки 4 пользователя 2. Промежуточные элементы 8 посредством сочленения 20 расположены на каждом элементе 18 для передачи силы, который расположен в оболочке 56. Пассивный рабочий орган 26 выполнен в виде упругого троса или проволоки. На промежуточных элементах 8 расположен элемент 58 растяжения, который соединяет друг с другом два промежуточных элемента 8 и вместе с тем два опорных элемента 6 для руки. Устройство располагает, к тому же, плечевыми ремнями 30, через соединительный элемент которых проведен элемент 58 растяжения. На фиг.18 начерчена, кроме того, середина позвоночника 88. Она соответствует идеализированной оси симметрии позвоночника. Видно, что нижние концы элементов 18 для передачи силы, которые соединены с ответными опорными элементами 16 или расположены на них, удалены от оси 88 позвоночника в сторону. Поэтому это неизбежно относится и к самим ответным опорным элементам 16.
Элементы этого варианта осуществления изображены на фиг.19. На двух элементах 18 для передачи силы с возможностью поворота вокруг соответствующего сочленения 20 расположено по одному промежуточному элементу 8 каждого опорного элемента 6 для руки. Между двумя промежуточными элементами 8 находится элемент 58 растяжения, проходящий через соединительный элемент между плечевыми ремнями, которые не изображены.
На фиг.20 в верхней области показан один из плечевых ремней 30, а также повязка 10 для руки, имеющая расположенный на ней застегивающий элемент 54. Застегивающий элемент 54 располагает крепежным элементом 60 в виде пряжки, которая может взаимодействовать с показанной в нижней части фиг.20 проушиной 62, чтобы застегивать повязку 10 для руки вокруг не изображенной руки. Плечевой ремень 30 располагает аналогично выполненной проушиной 62. В нижней области фиг.20 застегивающий элемент 54 изображен в расстегнутом состоянии. Повязка 10 для руки уже не застегнута полностью вокруг руки. Крепежный элемент 60 теперь вставлен в проушину 62 плечевого ремня 30 и может таким образом надежно опираться. На конце застегивающего элемента 54 находится захватный элемент 64, с помощью которого застегивающий элемент 54 может легко захватываться.
На фиг.21 показаны разные фазы при расстегивании застежки 66 ответного опорного элемента 16, который выполнен, например, в виде набедренного ремня. Такой ремень предпочтителен также для других предметов, и сам по себе или как часть какого–либо устройства, в частности ортеза или протеза, представляет собой самостоятельное изобретение. На самом верхнем изображении показана застежка 66 в застегнутом состоянии. Она располагает пряжкой, стопорный элемент 68 которой с геометрическим замыканием взаимодействует с предусмотренным при этом стопорным гнездом 70. При сжимании двух элементов 72 управления стопорный элемент 68 и стопорное гнездо 70 могут отсоединяться друг от друга, как это изображено на втором изображении сверху. По стрелке 74 действует сила растяжения. На третьем изображении сверху изображено, что этой силой растяжения стопорный элемент 68 наклоняется, пока он не встанет в почти перпендикулярное положение относительно плоскости чертежа, как это показано на четвертом изображении сверху. Дальнейшее удаление двух концов ответного опорного элемента 16 друг от друга невозможно, так как стопорный элемент 68 в этом положении не проходит через проушину 76. Для этого сначала стопорный элемент 68 должен наклоняться, как это показано на втором изображении снизу. Только в этом положении он проходит через проушину 76, и два элемента могут отсоединяться друг от друга, когда действует сила по стрелке 74, как это изображено на самом нижнем изображении. Тем самым в застежку 66 вводится предохранитель, который препятствует полному отсоединению и при этом отскакиванию или отдаче отдельных концов ответного опорного элемента 16, возникающему при одном только задействовании элементов 72 управления.
На фиг.22 на левом изображении снова показан элемент 18 для передачи силы, промежуточный элемент 8, а также рабочий орган 26. В области сочленения 20 имеется, кроме того, накладной элемент 78, который на левом изображении фиг.22 еще не прилегает к упругому элементу, действующему в качестве пассивного рабочего органа. На правом изображении фиг.22 это не так. Видно, что накладной элемент 78 прилегает к действующему в качестве пассивного рабочего органа упругому элементу. Так как накладной элемент 78 предпочтительно находится точно на оси вращения сочленения 20, за счет контакта между упругим элементом и накладным элементом 78 к опорному элементу 6 для руки прикладывается сила, которая вызывает вращающий момент, на опорном элементе 6 для руки. Упругий элемент делится прилегающим накладным элементом 78 на две части, которые, хотя и действуют каждая с некоторой силой, однако не могут создавать вращающий момент, так как эти силы направлены радиально к оси вращения сочленения 20. Угол между опорным элементом 6 для руки и элементом 18 для передачи силы, при котором накладной элемент 78 прилегает к упругому элементу, предпочтительно может настраиваться. Тогда дальнейший поворот опорного элемента 6 для руки в направлении часовой стрелки осуществляется без приложения упругим элементом, то есть пассивным рабочим органом, силы к опорному элементу 6 для руки.
На фиг.23 эта ситуация показана на левом изображении. Упор 80 препятствовал бы дальнейшему повороту промежуточного элемента 8 относительно элемента 18 для передачи силы вокруг сочленения 20. Например, для хранения устройства или приведения выступа 80 в пассивное положение выступ 80, как показано на втором изображении слева, по стрелке 74 выводится из контакта с промежуточным элементом 8. Итак, как изображено на втором изображении справа, по двойной стрелке 50 в двух направлениях промежуточный элемент 8 может совершенно свободно поворачиваться относительно элемента 18 для передачи силы и так приводиться в изображенное крайнее правое положение.
На фиг.24 показана возможность реализации настраиваемой силы, которая прикладывается пассивным рабочим органом 26. Пассивный рабочий орган воздействует на точку 82 воздействия, которая расположена эксцентрически относительно сочленения 20, на промежуточном элементе 8 опорного элемента 6 для руки. С помощью надлежащего инструмента, в показанном примере осуществления отвертки, посредством элемента геометрического замыкания положение точки 82 воздействия относительно оси поворота сочленения 20 может переставляться и так настраиваться эксцентриситет и модифицироваться прикладываемая пассивным рабочим органом 26 сила. Возможность, имеющаяся альтернативно или дополнительно к этому, изображена на фиг.25. На ней на каждом из двух изображений показан элемент 18 для передачи силы, а также расположенный на нем промежуточный элемент 8. Это изображение повернуто относительно изображения, показанного на фиг.24, на 90°. В каждом случае имеются два пассивных рабочих органа 26, которые воздействуют на противолежащую точку 82 воздействия на промежуточном элементе 8. Теперь, если надо настроить силу, альтернативно или дополнительно к показанной на фиг.24 мере один или оба пассивных рабочих органа 26 могут также сниматься и заменяться другим. Тем самым также может настраиваться сила. Если пассивный рабочий орган должен оставаться на месте, чтобы, например, снова применяться в более поздний момент времени, его верхняя крепежная петля может располагаться на выступе 84.
На фиг.26 показано сочленение 20 вместе с промежуточным элементом 8 опорного элемента 6 для руки и элементом 18 для передачи силы. Видно, что точка 82 воздействия выполнена с возможностью смещения. Для этого устройство располагает двигателем 86, с помощью которого может осуществляться привод изображенных в левой области фиг.26 зубчатых колес, вследствие чего точка 82 воздействия движется. С помощью двигателя система может приводиться в состояние минимальной силы и так, по меньшей мере почти, предпочтительно полностью деактивироваться что, в частности, предпочтительно при надевании и снятии устройства, или когда поддерживание не требуется по другим причинам.
Фиг.27 и 28 соответствуют изображению фиг.18 с той разницей, что имеются два других элемента 58 растяжения, которые расположены не между опорами 6 для руки, а между каждой из опор 6 для руки и ответным опорным элементом 16. С их помощью также повязки 10 для руки удерживаются на руке. К тому же элементы для двух рук независимы друг от друга, так что может предотвращаться влияние. На фиг.28, к тому же, удален элемент 58 растяжения, показанный на фиг.18.
На фиг.29 изображен один из вариантов осуществления настоящего изобретения, в котором пассивный рабочий орган 26 не расположен между рычагом для воздействия силы опорного элемента 6 для руки и элементом 18 для передачи силы или ответным опорным элементом 16, как в других изображенных вариантах осуществления, а распространяется между рычагом для воздействия силы элемента 18 для передачи силы и опорным элементом 6 для руки. Благодаря этому также на опорный элемент 6 для руки действует поддерживающая сила.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
2 Пользователь
4 Рука
6 Опорный элемент для руки
8 Промежуточный элемент
10 Повязка для руки
12 Манжета
14 Ответная опора
16 Ответный опорный элемент
17 Накладной элемент
18 Элемент для передачи силы
20 Сочленение
22 Шаровое сочленение
24 Регулировочное устройство
26 Пассивный рабочий орган
28 Рычажный элемент
30 Плечевой ремень
32 Соединительный элемент
34 Пряжка
36 Ремень
38 Подушка
40 Карман
42 Экзоскелет
44 Набедренный элемент
46 Элемент для контакта с полом
48 Поворотный рычаг
50 Двойная стрелка
51 Ответный натяжитель
54 Застегивающий элемент
56 Оболочка
58 Элемент растяжения
60 Крепежный элемент
62 Проушина
64 Захватный элемент
66 Застежка
68 Стопорный элемент
70 Стопорное гнездо
72 Элемент управления
74 Стрелка
76 Проушина
78 Накладной элемент
80 Выступ
82 Точка воздействия
84 Выступ
86 Двигатель
88 Ось позвоночника
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ОБЕИХ РУК ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2749840C1 |
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| СИСТЕМА ПОМОЩИ ОПЕРАТОРУ В ПРИЛОЖЕНИИ УСИЛИЙ | 2018 |
|
RU2747404C1 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2309709C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ БОЛЬНЫХ С ПОСЛЕДСТВИЯМИ ПОРАЖЕНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ И С ПОВРЕЖДЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2165752C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| РАЗГРУЗОЧНЫЙ ЖИЛЕТ | 2023 |
|
RU2824099C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
| Устройство для регистрации движений надплечий | 1990 |
|
SU1777825A1 |
| УСТРОЙСТВО ПОДАЧИ РЕМНЯ БЕЗОПАСНОСТИ | 1995 |
|
RU2137628C1 |
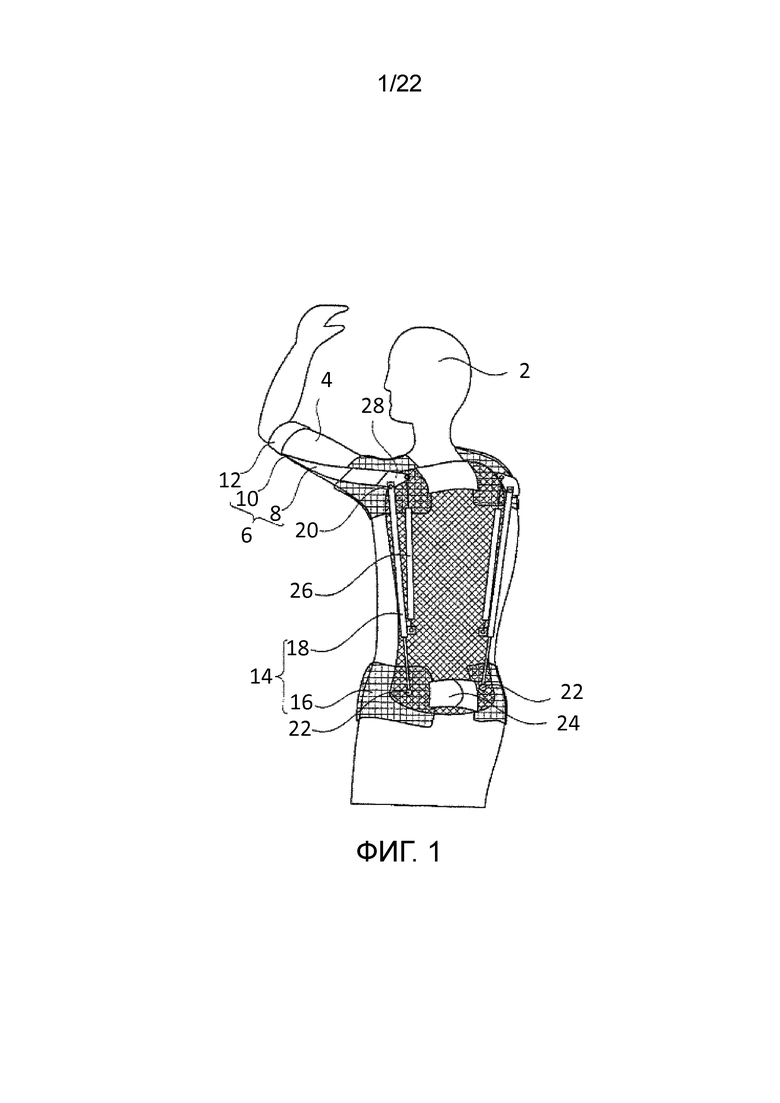
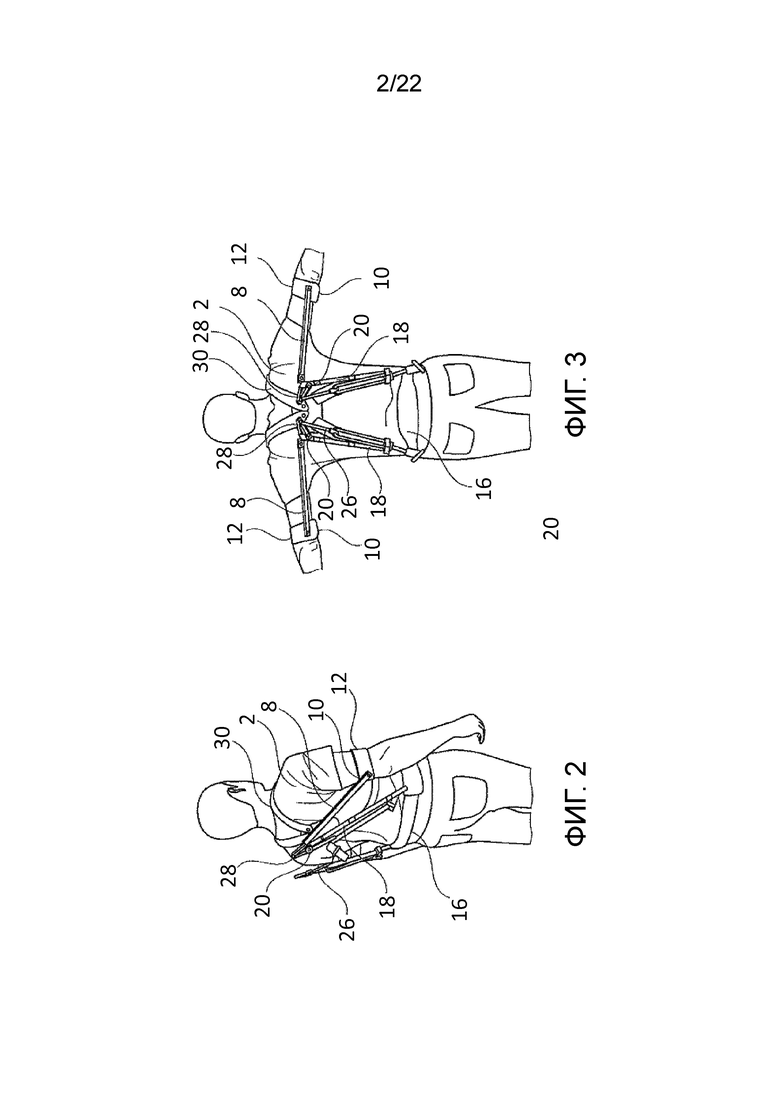
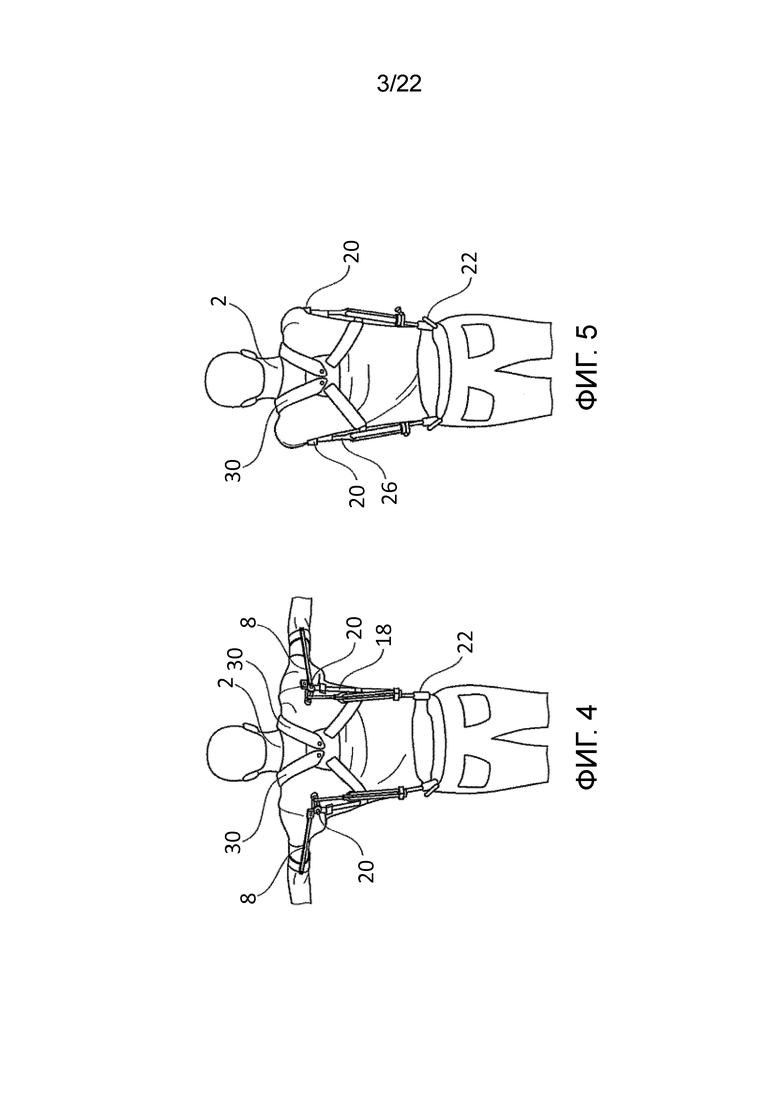
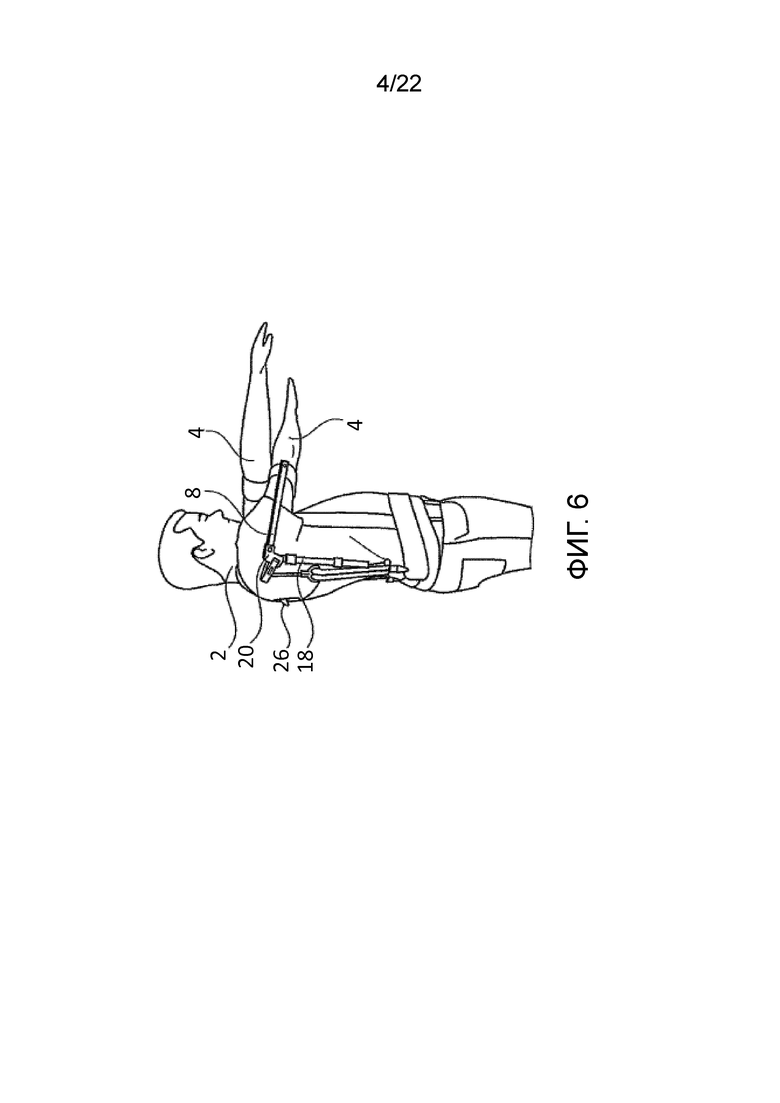
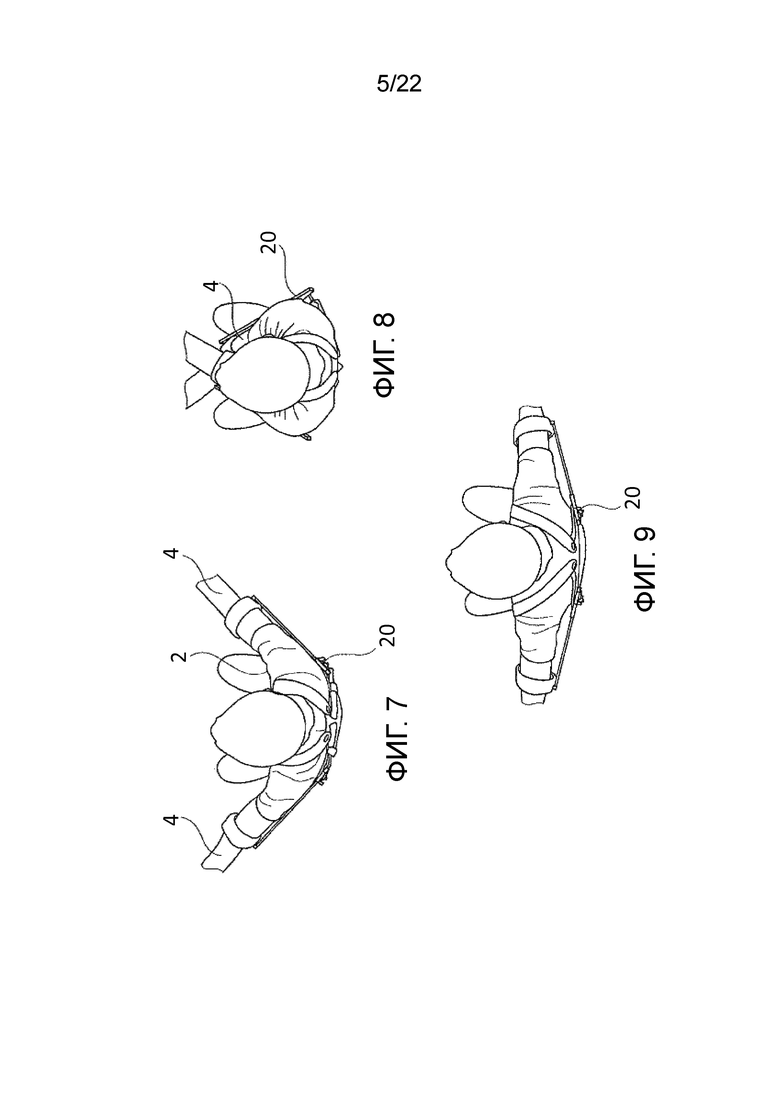
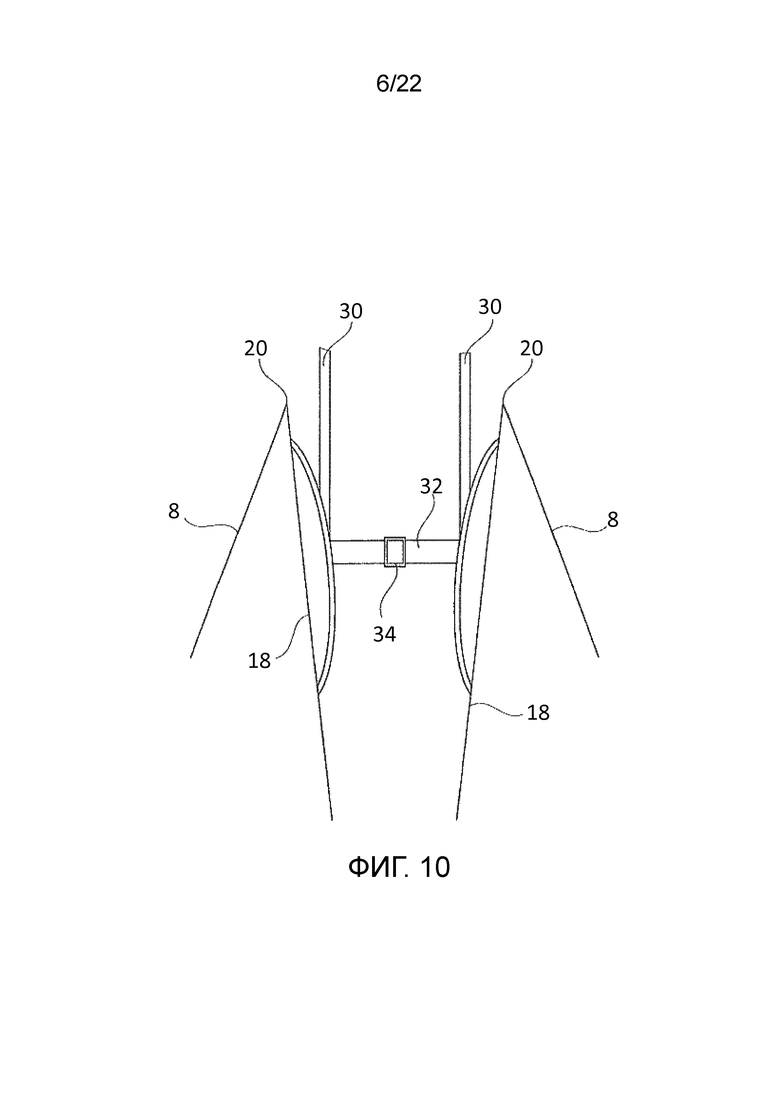
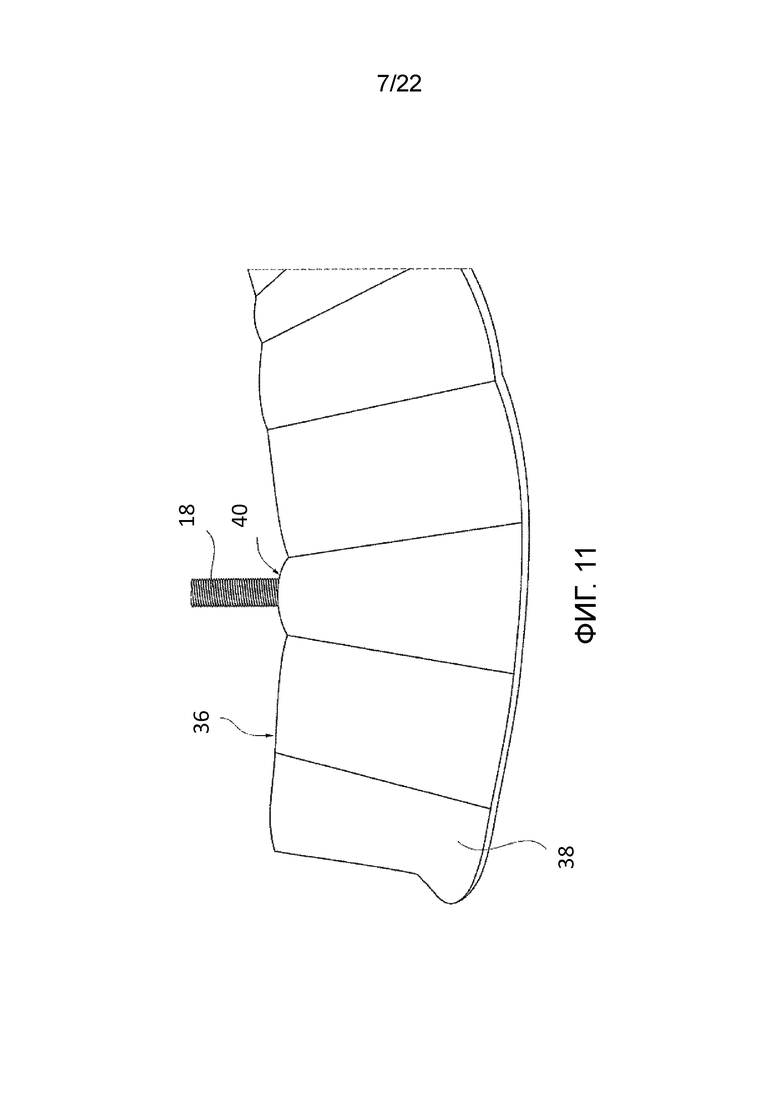
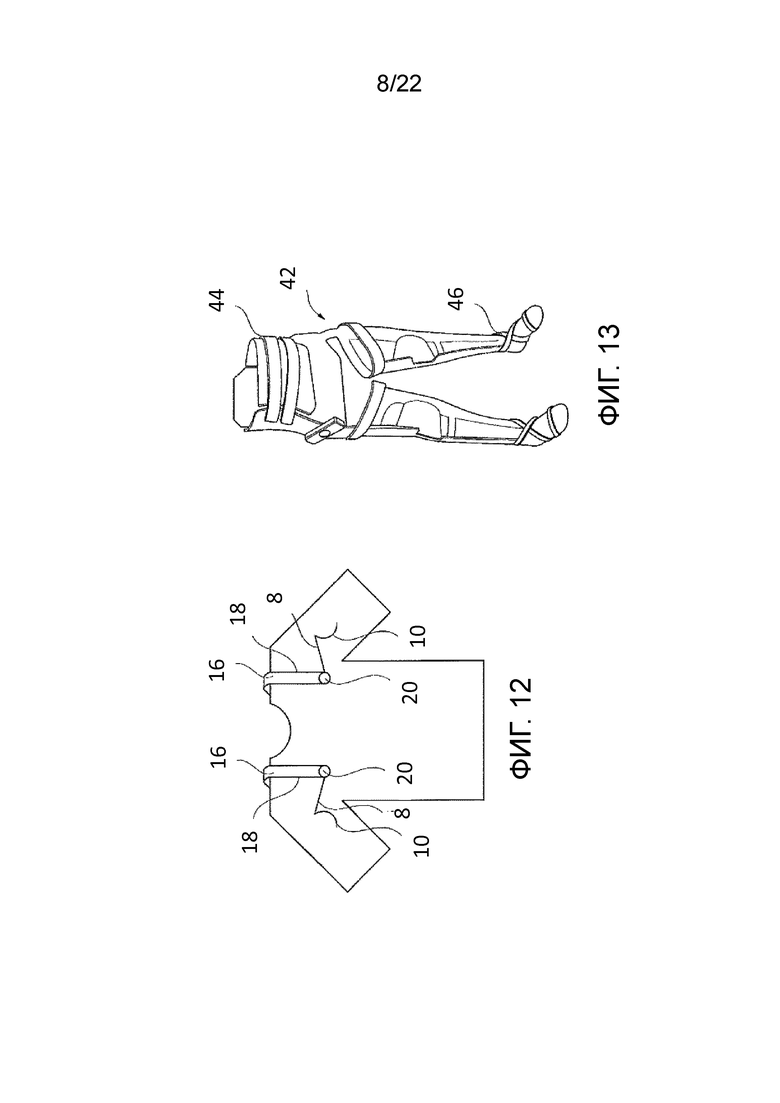
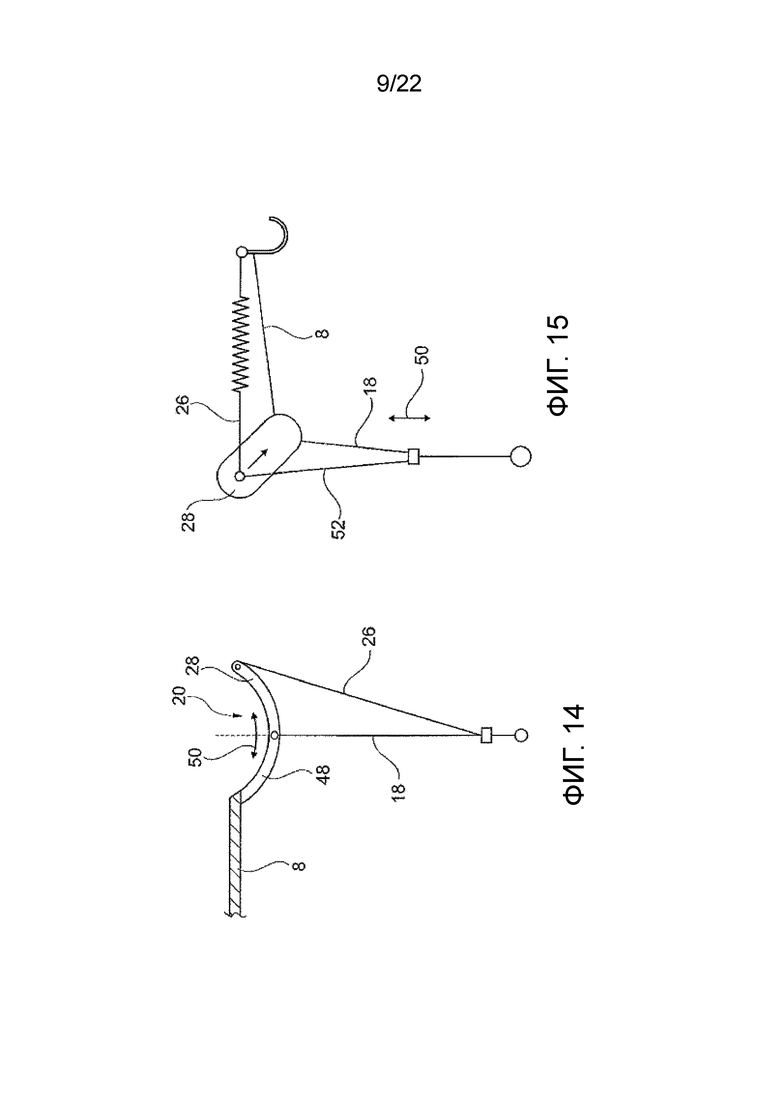
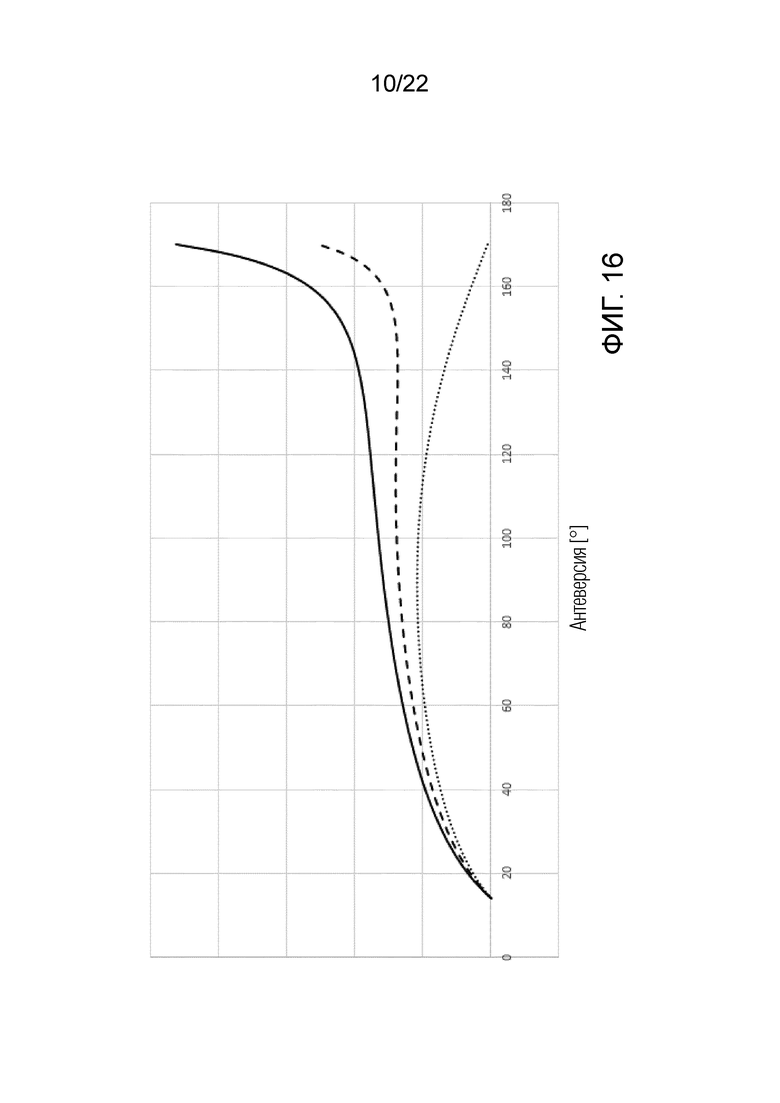
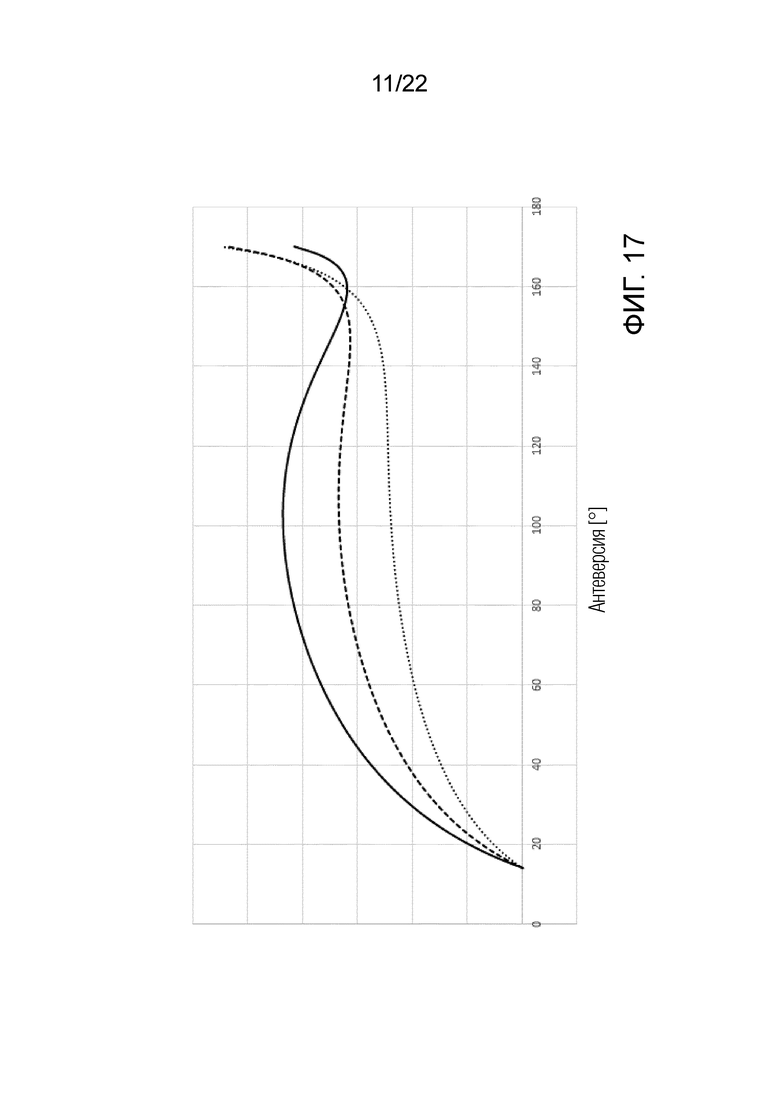
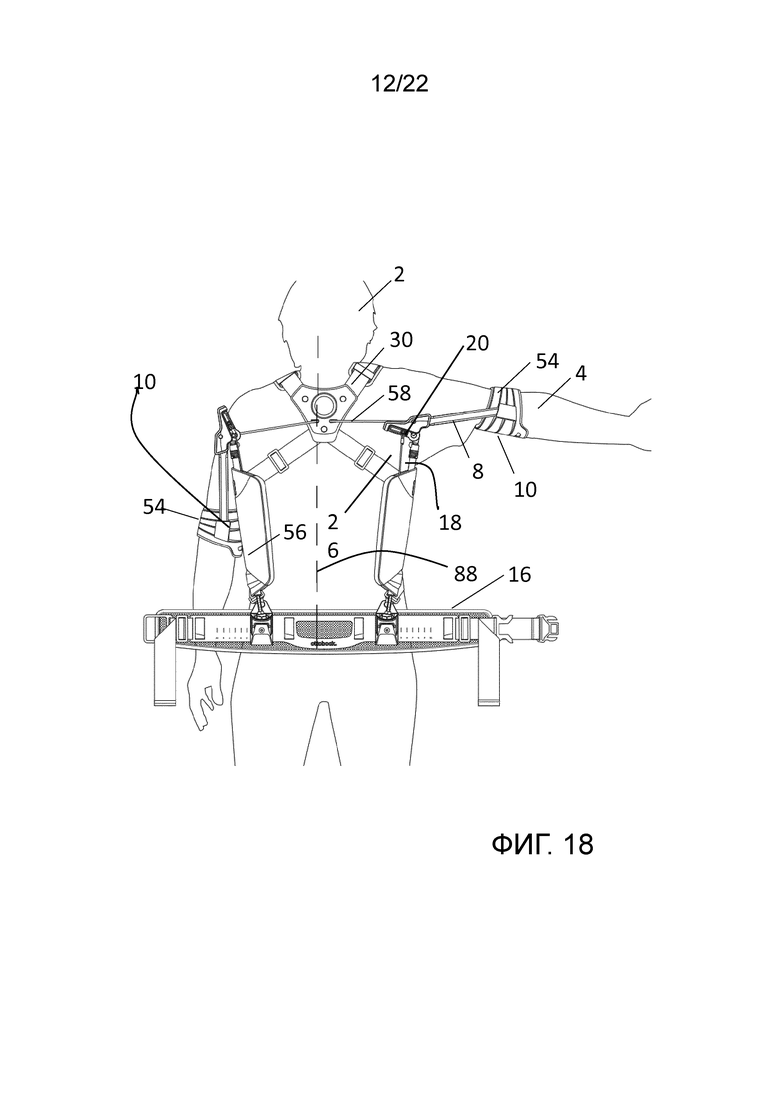
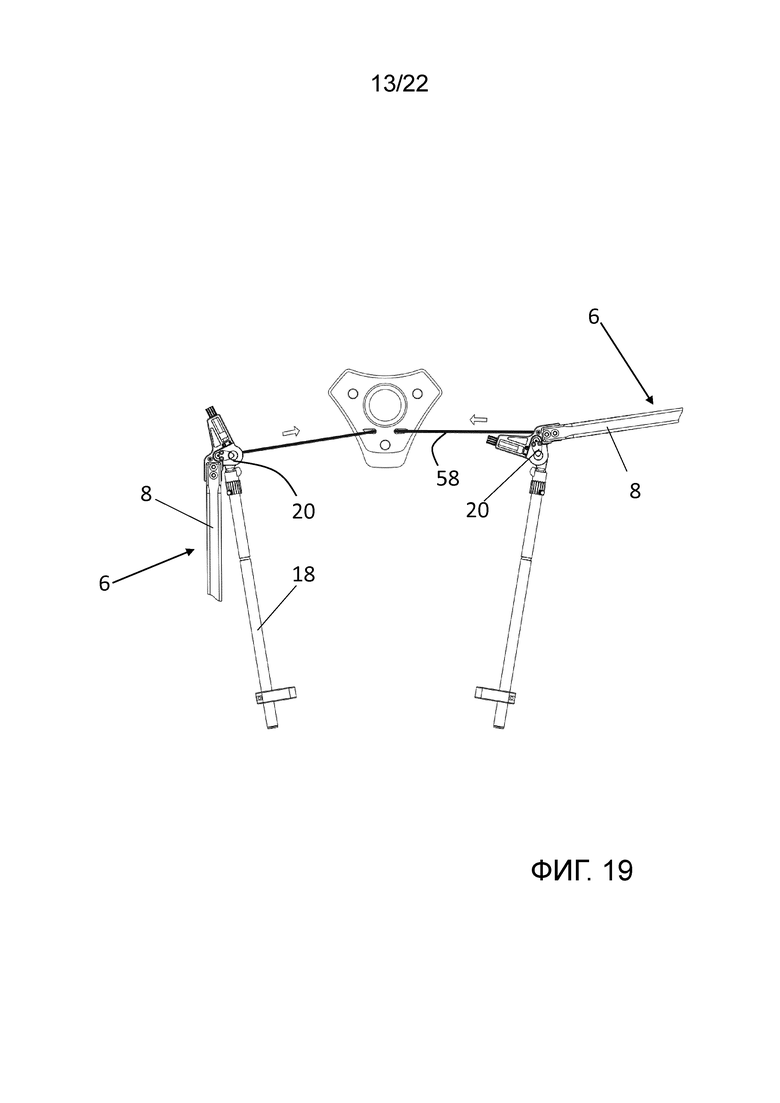
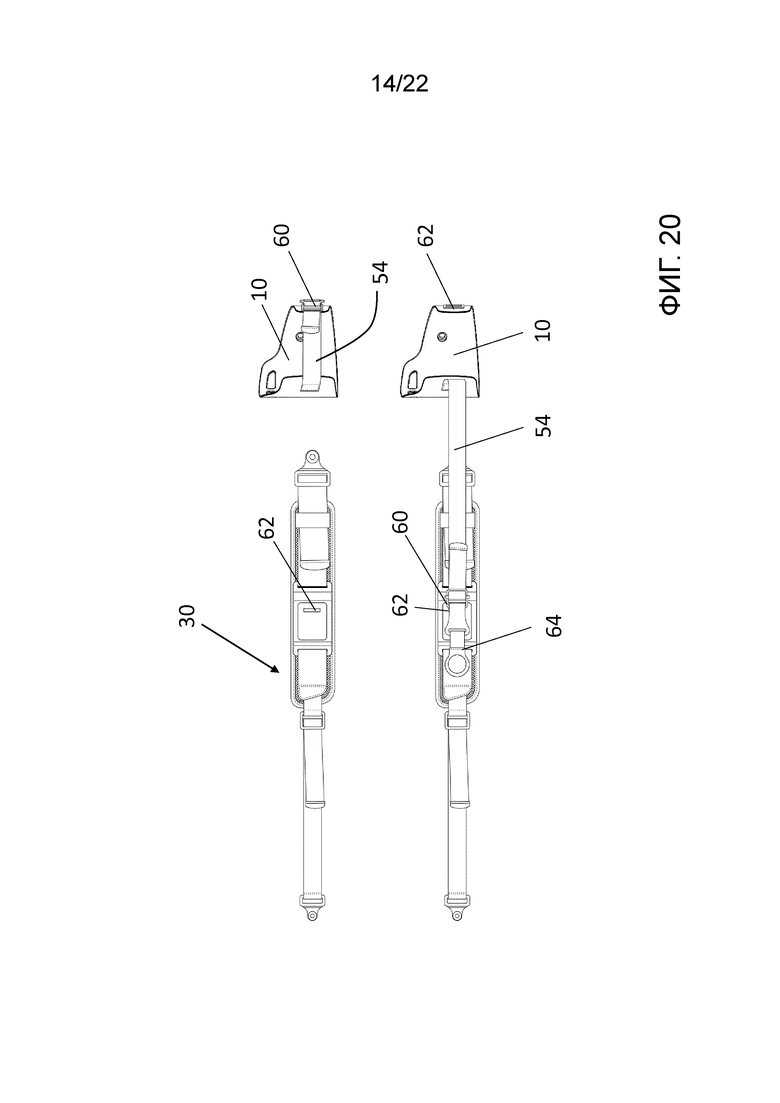
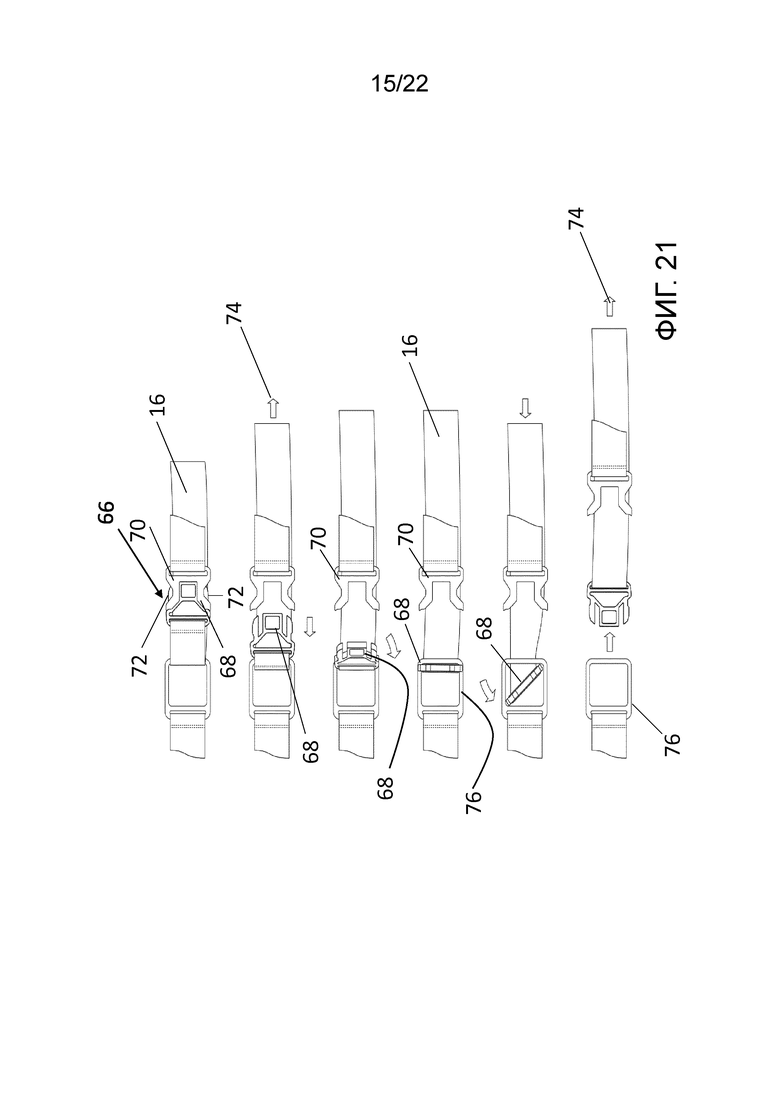
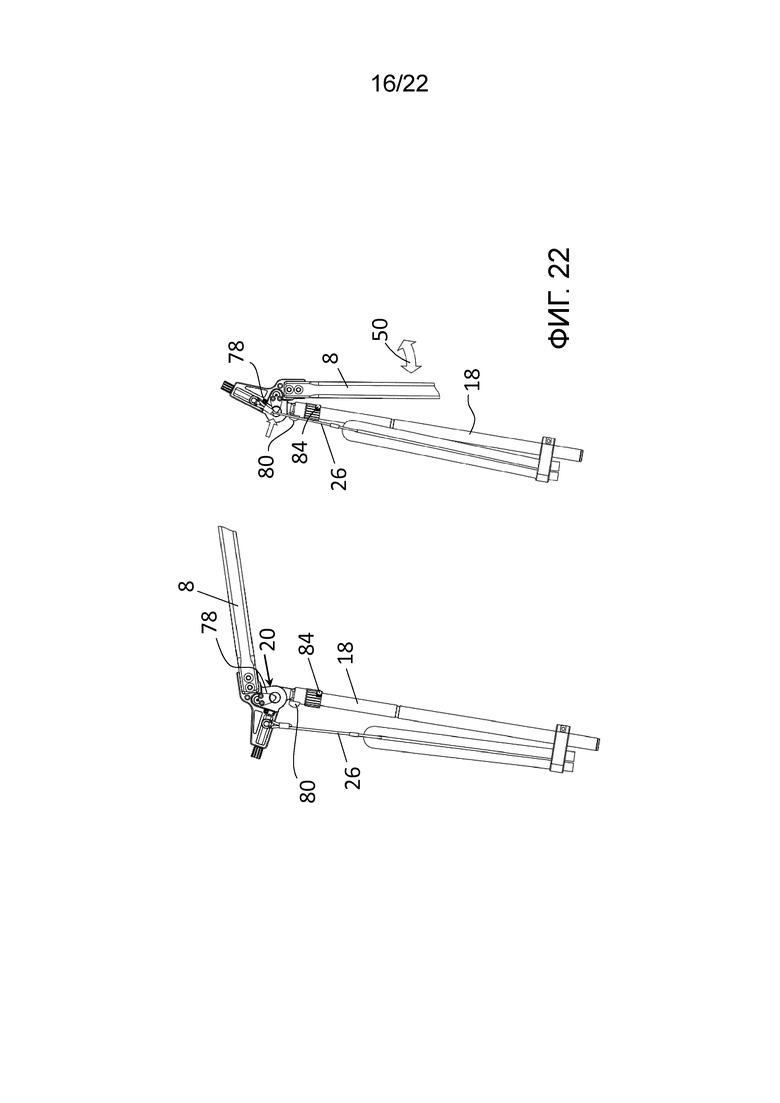
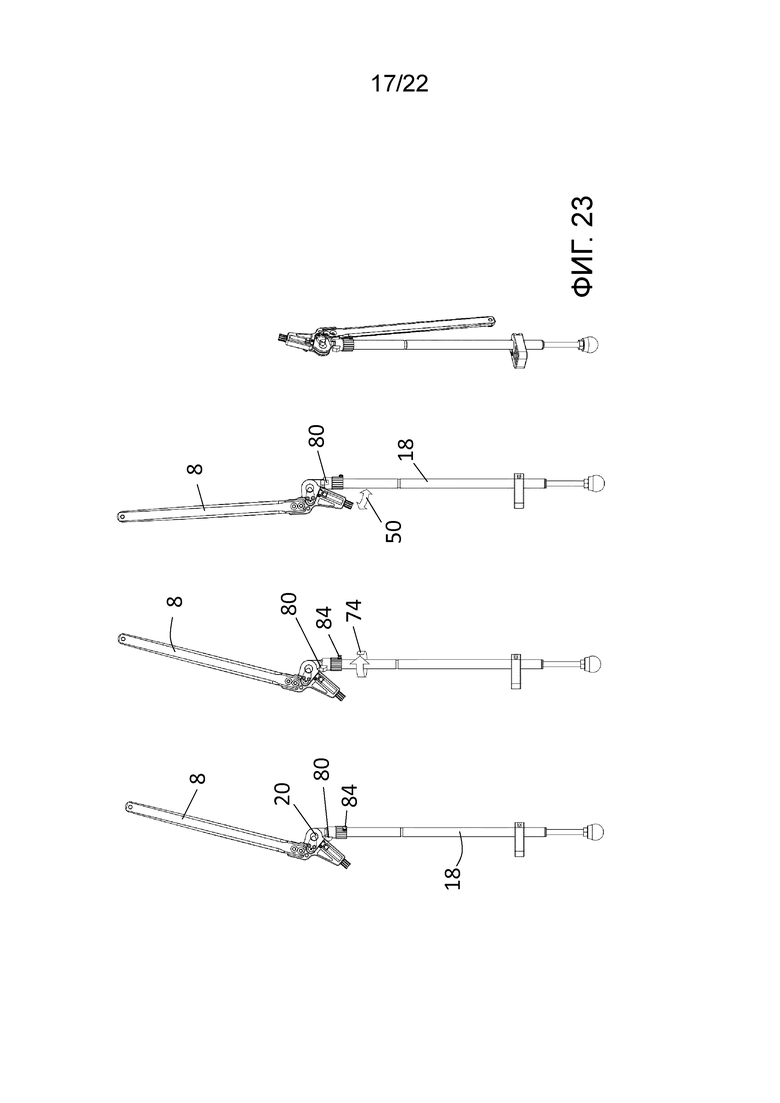
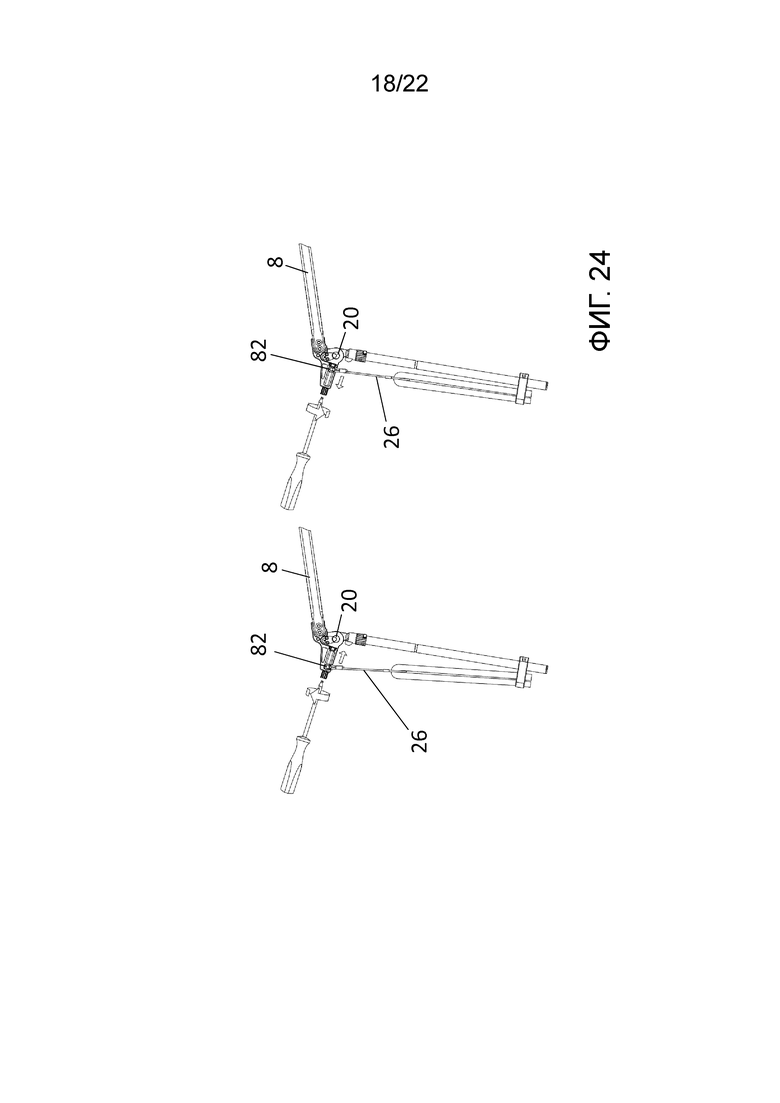
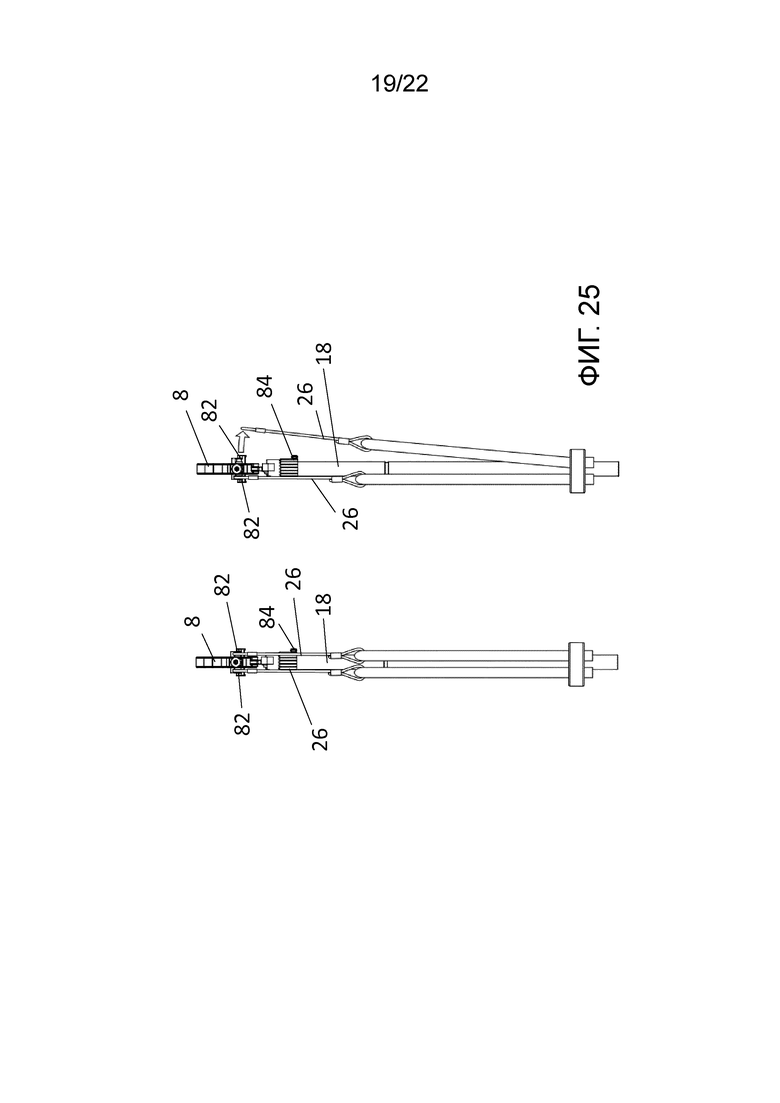
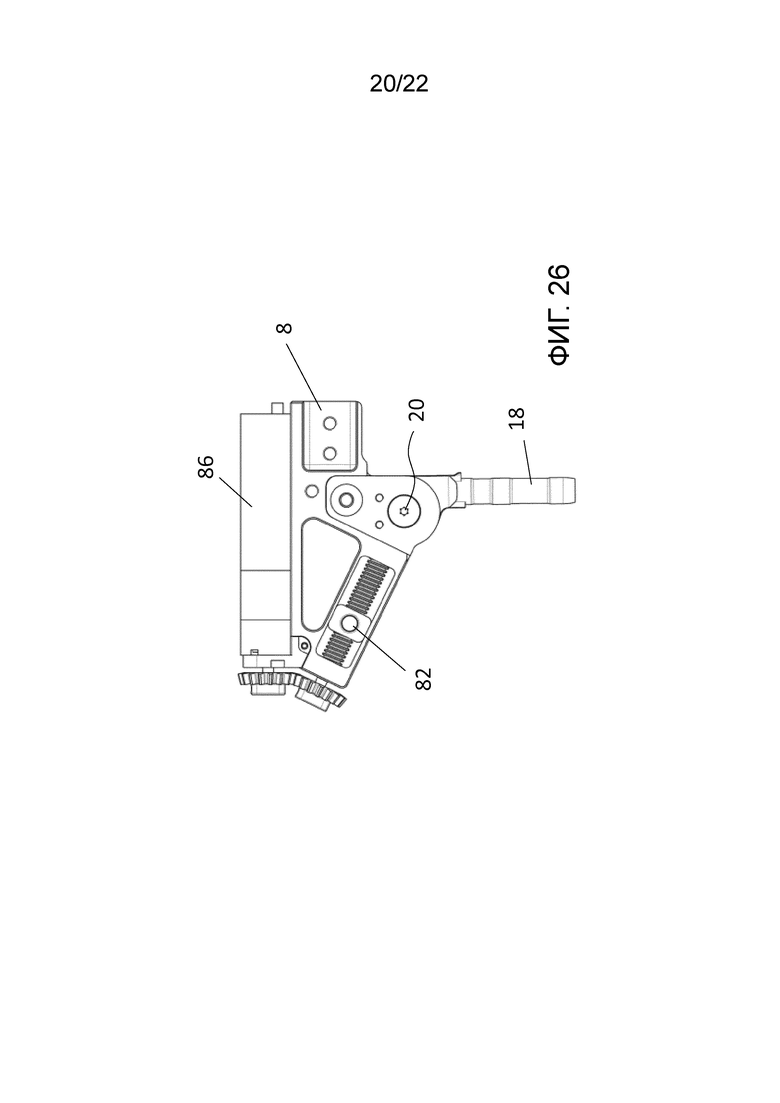
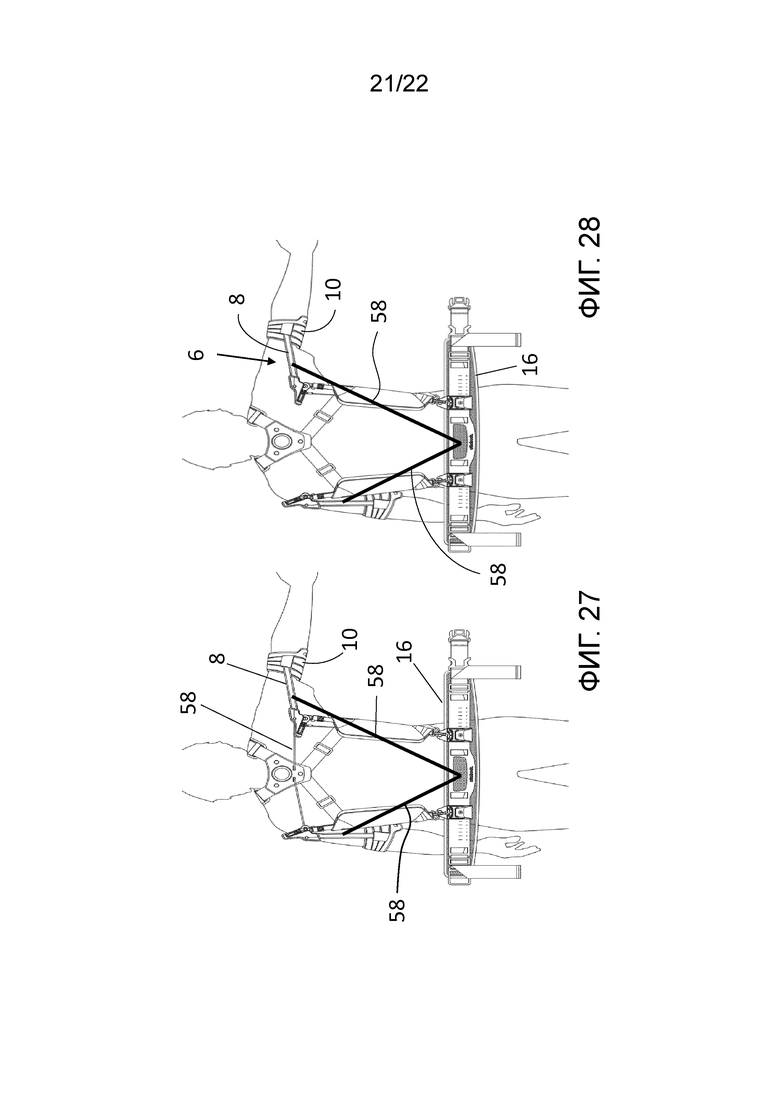
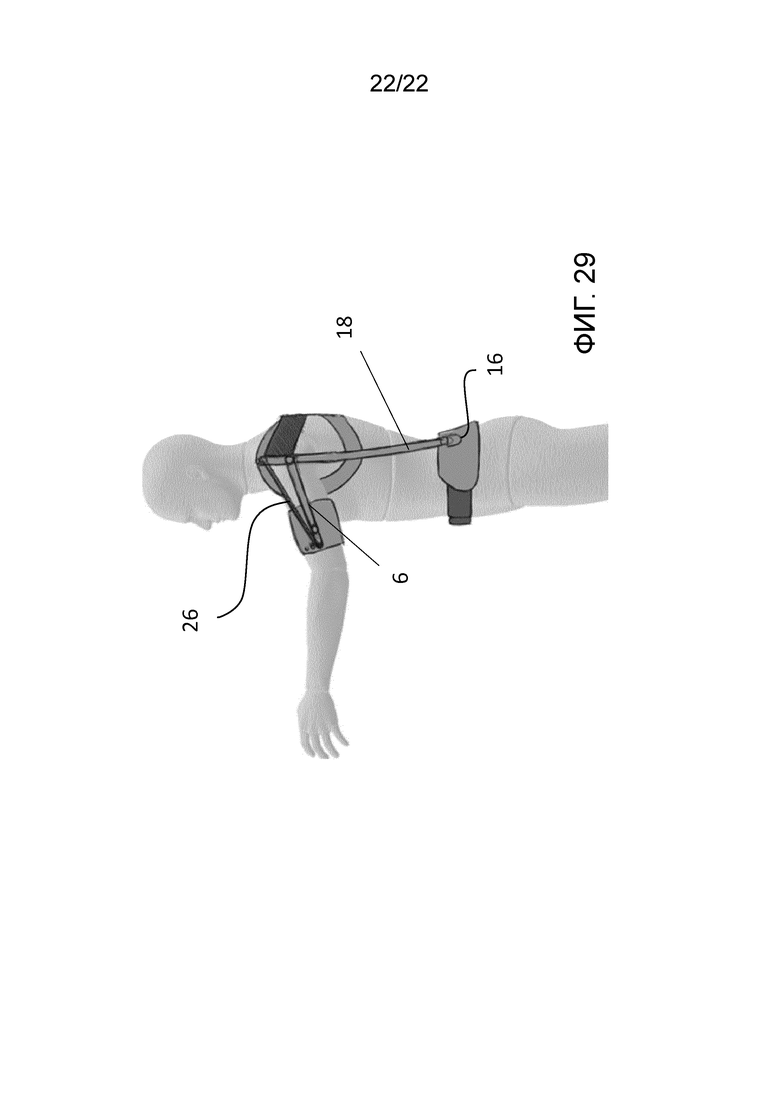
Группа изобретений относится к медицине, а именно к устройствам для поддерживания рук пользователя. Устройство содержит опорный элемент для руки, пассивный рабочий орган и ответную опору для прикладываемой силы к опорному элементу для руки. Опорный элемент для руки имеет повязку для руки для надевания на руку. Пассивный рабочий орган предназначен для приложения силы к опорному элементу для руки. Ответная опора имеет ответный опорный элемент и элемент для передачи силы, предназначенный для передачи силы реакции на ответный опорный элемент. Устройство выполнено так, что устройством не ограничена свобода движения руки. Элемент для передачи силы представляет собой элемент для передачи силы давления, с которым с возможностью поворота вокруг оси поворота соединен опорный элемент для руки посредством сочленения. Пассивный рабочий орган прикладывает силу к опорному элементу для руки эксцентрично относительно оси поворота. Ответный опорный элемент содержит накладной элемент, предназначенный для размещения устройства на части туловища. Элемент для передачи силы давления соединен с накладным элементом посредством сочленения или шарнира. Достигается возможность воспроизведения движений, которые осуществляются в том числе за счет движений туловища, позвоночника или плечевого пояса, что обеспечивает повышение безопасности пользователя при использовании устройства. 2 н. и 19 з.п. ф-лы, 29 ил.
1. Устройство для поддерживания по меньшей мере одной руки (4) пользователя (2), причем это устройство содержит
– по меньшей мере один опорный элемент (6) для руки, имеющий повязку (10) для руки для надевания на руку (4),
– по меньшей мере один пассивный рабочий орган (26), который предназначен для приложения силы по меньшей мере к одному опорному элементу (6) для руки, и
– по меньшей мере одну ответную опору (14) для прикладываемой силы по меньшей мере к одному опорному элементу (6) для руки, которая имеет по меньшей мере один ответный опорный элемент (16) и
– по меньшей мере один элемент (18) для передачи силы, предназначенный для передачи силы реакции на по меньшей мере один ответный опорный элемент (16),
отличающееся тем, что
это устройство выполнено так, что устройством не ограничена свобода движения руки (4), и по меньшей мере один элемент (18) для передачи силы представляет собой элемент для передачи силы давления, с которым с возможностью поворота вокруг оси поворота соединен по меньшей мере один опорный элемент (6) для руки посредством сочленения (20),
по меньшей мере один пассивный рабочий орган (26) прикладывает силу по меньшей мере к одному опорному элементу (6) для руки эксцентрично относительно оси поворота, и
по меньшей мере один ответный опорный элемент (16) содержит накладной элемент, предназначенный для размещения устройства на части туловища, причем элемент для передачи силы давления соединен с накладным элементом посредством сочленения или шарнира.
2. Устройство по п. 1, отличающееся тем, что элемент для передачи силы давления представляет собой штангу или шину.
3. Устройство по п. 1, отличающееся тем, что по меньшей мере один ответный опорный элемент (16) представляет собой накладной элемент (17) для надевания на часть туловища.
4. Устройство по п. 3, отличающееся тем, что накладной элемент представляет собой ремень, ремешок, бандаж или элемент повязки.
5. Устройство по п. 3, отличающееся тем, что часть туловища представляет собой торс пользователя (2).
6. Устройство по п. 1, отличающееся тем, что по меньшей мере один ответный опорный элемент (16) имеет по меньшей мере один плечевой элемент (30) для надевания на надплечье пользователя (2).
7. Устройство по п. 1, отличающееся тем, что по меньшей мере один ответный опорный элемент (16) имеет по меньшей мере один элемент (46) для контакта с полом, так что сила реакции может вводиться в пол.
8. Устройство по п. 1, отличающееся тем, что ориентация по меньшей мере одного элемента (18) для передачи силы относительно по меньшей мере одного ответного опорного элемента (16) может изменяться движением торса пользователя (2) и/или движением руки (4).
9. Устройство по п. 1, отличающееся тем, что элемент для передачи силы давления соединен по меньшей мере с одним ответным опорным элементом (16).
10. Устройство по п. 1, отличающееся тем, что элемент для передачи силы давления соединен с накладным элементом (17) посредством шарового сочленения (22).
11. Устройство по п. 1, отличающееся тем, что по меньшей мере один пассивный рабочий орган (26) имеет упругий элемент.
12. Устройство по п. 11, отличающееся тем, что упругий элемент представляет собой пружинный элемент.
13. Устройство по п. 1, отличающееся тем, что по меньшей мере один пассивный рабочий орган (26) предназначен для прикладывания силы в зависимости от положения и/или ориентации указанного по меньшей мере одного опорного элемента (6) для руки относительно по меньшей мере одного ответного опорного элемента (16).
14. Устройство по п. 13, отличающееся тем, что по меньшей мере один пассивный рабочий орган (26) предназначен для прикладывания силы в зависимости от угла поворота по меньшей мере одного опорного элемента (6) для руки вокруг оси поворота.
15. Устройство по п. 1, отличающееся тем, что прикладываемая по меньшей мере одним пассивным рабочим органом (26) сила может изменяться путем изменяемого предварительного напряжения по меньшей мере одного пассивного рабочего органа (26) и/или настраиваемого эксцентриситета приложения силы по меньшей мере к одному опорному элементу (6) для руки.
16. Устройство по п. 1, отличающееся тем, что по меньшей мере один элемент (18) для передачи силы установлен в направляющей, которая препятствует удалению от торса части по меньшей мере одного элемента (18) для передачи силы, на которой расположен по меньшей мере один опорный элемент (6) для руки, в надетом состоянии устройства.
17. Устройство по п. 1, отличающееся тем, что устройство имеет два опорных элемента (6) для руки для опирания обеих рук (4) пользователя, причем эти два опорных элемента (6) для руки предпочтительно расположены каждый с возможностью поворота по меньшей мере на одном элементе (18) для передачи силы, причем устройство дополнительно содержит расположенный между соответствующими элементами (18) для передачи силы по меньшей мере один соединительный элемент (32), с помощью которого предпочтительно к обоим элементам (18) для передачи силы может прикладываться сила растяжения.
18. Устройство по п. 17, отличающееся тем, что оба элемента (18) для передачи силы соединены по меньшей мере с одним ответным опорным элементом (16) в одном и том же месте.
19. Устройство по п. 1, отличающееся тем, что устройство имеет блокировочное устройство, с помощью которого может блокироваться движение по меньшей мере одного опорного элемента (6) для руки относительно по меньшей мере одного элемента (18) для передачи силы по меньшей мере в одном направлении.
20. Устройство по п. 19, отличающееся тем, что движение может блокироваться полностью.
21. Устройство для поддерживания по меньшей мере одной руки (4) пользователя (2), причем это устройство содержит
– по меньшей мере один опорный элемент (6) для руки, имеющий повязку (10) для руки для надевания на руку (4),
– по меньшей мере один пассивный рабочий орган (26), который предназначен для приложения силы по меньшей мере к одному опорному элементу (6) для руки, и
– по меньшей мере одну ответную опору (14) для прикладываемой силы по меньшей мере к одному опорному элементу (6) для руки, которая имеет по меньшей мере один ответный опорный элемент (16) и
– по меньшей мере один элемент (18) для передачи силы, предназначенный для передачи силы реакции по меньшей мере на один ответный опорный элемент (16),
отличающееся тем, что
повязка (10) для руки подвижна относительно по меньшей мере одного ответного опорного элемента (16) по меньшей мере в трех поступательных и трех вращательных степенях свободы,
по меньшей мере один элемент (18) для передачи силы представляет собой элемент для передачи силы давления, с которым с возможностью поворота вокруг оси поворота соединен по меньшей мере один опорный элемент (6) для руки посредством сочленения (20),
по меньшей мере один пассивный рабочий орган (26) прикладывает силу по меньшей мере к одному опорному элементу (6) для руки эксцентрично, и
по меньшей мере один ответный опорный элемент (16) содержит накладной элемент, предназначенный для размещения устройства на части туловища, причем элемент для передачи силы давления соединен с накладным элементом посредством сочленения или шарнира.
| US 20160339583 A1, 24.11.2016 | |||
| 0 |
|
SU155011A1 | |
| US 20160081871 A1, 24.03.2016 | |||
| US 2014158839 A1, 12.06.2014 | |||
| US 20110164949 A1, 07.07.2011. | |||

