Изобретение относится к области геодезического контроля в дорожно-строительной отрасли.
Известен способ определения поперечной ровности (колейности) поверхности дорожного полотна автомобильной дороги, при котором на контролируемом участке автомобильной дороги измеряют параметры поперечного профиля поверхности дорожного полотна в динамическом режиме, отличающийся тем, что планово-высотное обоснование (ПВО) на контролируемом участке автомобильной дороги создают методом мобильной сканерной съемки, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по обочинам автомобильной дороги через 2-3 километра и в сторону от оси автомобильной дороги не более 300 метров, а также твердые точки по сторонам обочин дорожного полотна в виде оснований столбов дорожных знаков и элементов обустройства автомобильной дороги, динамический режим измерения параметров поперечного профиля поверхности покрытия дорожного полотна осуществляют с помощью мобильного лазерного сканирования контролируемого участка в прямом и обратном направлении, в результате чего определяют координаты по осям X, Y, Z точек отражения лазерного луча от поверхности дорожного полотна и опорных пунктов ПВО, которые идентифицируются на сканах, получают скан, передают результаты сканирования (сканы) в ПЭВМ и с помощью компьютерной программы регистрируют в ней сканы, получают фактическую цифровую векторную трехмерную (3D) модель поверхности дорожного полотна, в этой же программе виртуально моделируют поверхность дорожного полотна в заданном направлении, используя проектные значения соответствующих геометрических параметров, совмещают ее по опорным пунктам ПВО с полученной фактической цифровой векторной трехмерной (3D) моделью поверхности дорожного полотна и формируют с заданной дискретностью поверхность колеи, в автоматическом режиме определяют расхождения между значениями измеряемых параметров поперечного профиля поверхности покрытия дорожного полотна на основе полученных пространственных координат по оси Z точек отражения лазерного луча фактической цифровой векторной трехмерной (3D) модели и соответствующими значениями проектной цифровой векторной трехмерной (3D) модели поверхности покрытия контролируемого участка автомобильной дороги, сравнивая полученные данные с соответствующими требованиями нормативных документов, определяют поперечную ровность (колейность) поверхности дорожного полотна автомобильной дороги. [Патент №2625091 G010C 3/20].
Недостатком данного способа являются недоступность для широкого круга пользователей за счет высокой стоимости оборудования, узкая направленность.
Наиболее близким по технической сущности к заявляемому изобретению является методика выполнения исполнительных съемок дорожного полотна автодорог. Данный комплекс основан на создании растровых 3D-моделей, посредством, проведения стереосъемки. Для реализации аппаратно-программного комплекса используются две цифровые фотокамеры (16Мп) и два комплекта спутникового оборудования, состоящие из приемников и антенн. [Быков В.Л. Разработка методики выполнения исполнительных съемок дорожного полотна автодорог / В.Л. Быков, Л.В. Быков, А.Г. Мадиев, В.Б. Калугин. - Текст: непосредственный // Геодезия, землеустройство и кадастры: проблемы и перспективы развития: сборник материалов II Международной научно-практической конференции, 26 марта 2020 года, ФГБОУ ВО Омский ГАУ. - Омск, 2020. - С. 28-31.].
Недостатками данного способа являются сложность технологий производства работ, низкая вероятность создания непрерывной высокоточной растровой 3D-модели, низкая производительность работ, сравнительно низкая точность создаваемой растровой 3D-модели.
Задачей предлагаемого изобретения является разработка способа мониторинга дорожного полотна автомобильных дорог, свободного от перечисленных недостатков.
Технический результат заявляемого изобретения заключается в упрощении технологии работ, обеспечении гарантированного построения непрерывной высокоточной растровой 3D модели, повышении производительности труда, повышении точности построения растровой 3D-модели.
Технический результат достигается тем, что способ проведения мониторинга дорожного полотна автомобильных дорог, при котором создается высокоточная растровая 3D-модель при помощи стереосъемки цифровыми фотокамерами и спутниковым оборудованием, в специальных компьютерных программах, для стереосъемки используют три цифровые фотокамеры, две фотокамеры монтируют на концах горизонтального базиса, а третью устанавливают между ними и смещают по высоте, стереосъемка производится в динамике, для определения координат центров фотографирования используют три комплекта спутниковых приемников, фотограмметрическую обработку осуществляют путем построения геометрических моделей по каждому триплету снимков без построения общей фототриангуляционной сети в системе координат, заданной координатами центров фотографирования, 3D модели местности строят по каждому триплету в едином координатном пространстве.
Использование при стереосъемке трех цифровых фотокамер и трех комплектов спутникового ГНСС оборудования, расположенных неколлинеарно (вместо двух расположенных на одной прямой), исключает необходимость определения связующих точек смежных моделей, что в свою очередь приводит к независимости построения каждой отдельной модели в заданной геодезической системе координат, совокупность данных факторов упрощает технологию производства работ и обеспечивает гарантированное построение непрерывной высокоточной растровой 3D модели.
Проведение стереосъемки в динамике позволяет сократить сроки выполнения работ, что приводит к повышению производительности работ.
Использование при стереосъемке трех цифровых фотокамер (вместо двух) позволяет строить модель местности трехкратной фотограмметрической засечкой, что в свою очередь приводит к повышению точности создаваемой растровой 3D-модели.
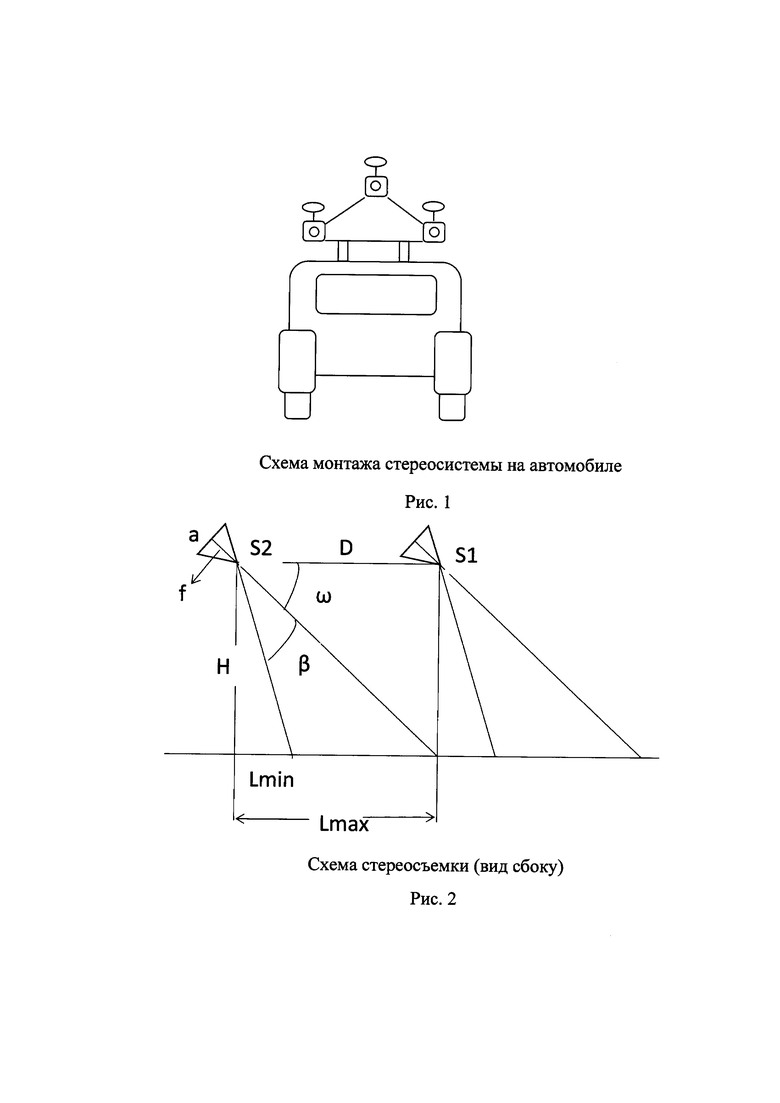
Способ реализуется следующим образом. В трех фотокамерах синхронизируют спуск затворов по внешнему сигналу, исходящему от таймера или бортового компьютера. Две фотокамеры монтируют на концах жесткого базиса, а третью - располагают между ними и смещают по высоте на определенную величину так, чтобы точки фотографирования не лежали на одной прямой (рис. 1).
Стереосистему наклоняют на определенный угол, который рассчитывают в зависимости от параметров фотокамер и требуемой точности построения 3D модели местности согласно схеме стереосъемки (рис. 2).
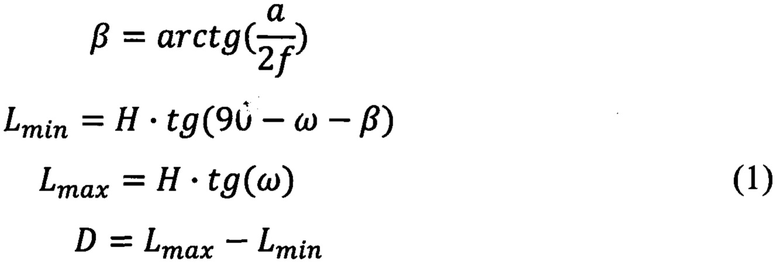
Задаваясь параметрами Н, a, f, ω рассчитывают параметры съемки по формулам (1)
По значению минимального интервала фотографирования tmin для выбранных съемочных камер рассчитывают максимально допустимую скорость движения автомобиля, а в зависимости от размера рабочей площади стереопары определяют точность фотограмметрической засечки и размер пикселя на дальнем плане модели.
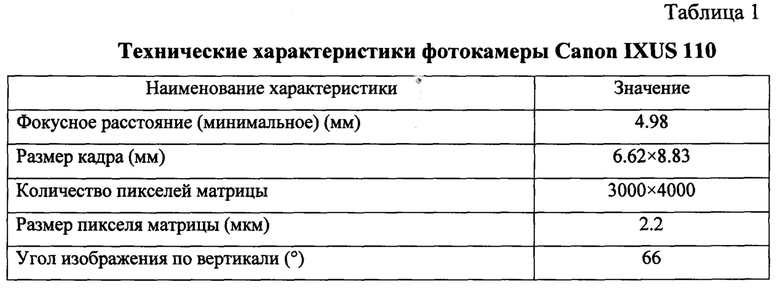
Пример расчета основных параметров стереосъемки выполнен для фотокамер Canon IXUS 110, технические характеристики которых приведены в таблице 1 Технические характеристики фотокамеры Canon IXUS 110.
Параметры стереосъемки при различных углах наклона фотокамер показаны в таблице 2. Расчет параметров стереосъемки тремя фотокамерами. Расчеты выполнены для минимального интервала фотографирования, равного 2 секундам. Оптимальный угол наклона определяют в зависимости от допустимой ошибки определения координат точек модели.
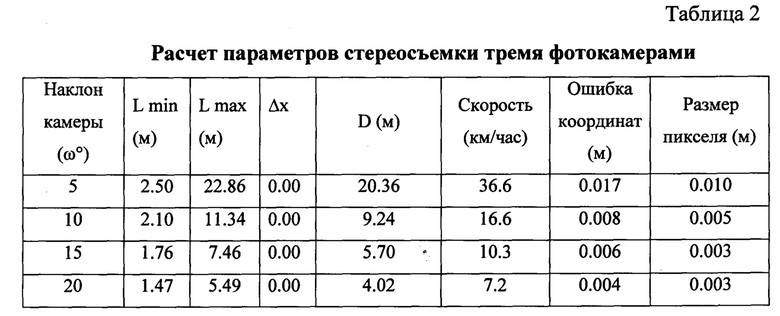
Задаваясь погрешностью координат порядка 0,01 м, находят, что оптимальный угол наклона стереосистемы составляет 10°, рабочая площадь модели ограничивается удалением точек на расстояние около 9 м, допустимая скорость движения автомобиля при минимальном интервале фотографирования составляет 16,6 км/час.
Для определения координат центров фотографирования используют геодезические спутниковые приемники, антенны которых устанавливают над объективами фотокамер. В процессе специальной калибровки стереосистемы определяют параметры редукции фазовых центров антенн относительно центров фотографирования. Приемники настраивают на работу в кинематическом режиме с автоматической записью временных меток, соответствующих моментам спуска затворов фотоаппаратов. Таким образом, обеспечивают фиксацию координат центра проекции каждой фотокамеры в момент фотографирования. На точке с известными координатами устанавливается базовая станция - спутниковый приемник, обеспечивающий дифференциальный способ определения координат.
Съемку выполняют с автомобиля, двигающегося по заданному участку автодороги с определенной скоростью и с требуемым интервалом фотографирования в прямом и обратном направлении.
Фотограмметрическую обработку осуществляют путем построения моделей по трем снимкам (триплетам) ориентированным в заданной системе координат и создания 3D моделей в пределах рабочей площади триплетов. Конечную продукцию экспортируют в систему автоматизированного проектирования для дальнейшей обработки.
Заявленный способ проведения мониторинга дорожного полотна автомобильных дорог обладает повышенной точностью построения 3D-модели поверхности покрытия дорожного полотна за счет использования трех цифровых камер. Заявленный способ позволяет исключить необходимость определения связующих точек смежных моделей за счет неколлинеарного расположения центров фотографирования, что в свою очередь приводит к независимости построения каждой отдельной модели в заданной геодезической системе координат за счет использования при стереосъемки трех цифровых фотокамер и трех комплектов спутникового ГНСС оборудования. Заявленный способ проведения мониторинга дорожного полотна позволяет сократить сроки выполнения работ, что приводит к повышению производительности работ за счет проведения мобильной стереосъемки.
Заявленный способ может быть использован при проведении мониторинга дорожного полотна, при строительстве и реконструкции автомобильных дорог, проведении диагностики и паспортизации, автомобильных дорог.
Заявленный способ проведения мониторинга дорожного полотна автомобильных дорог апробирован в лаборатории кафедры геодезии и дистанционного зондирования землеустроительного факультета ФГБОУ ВО Омский ГАУ в 2020 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМОВ СЫПУЧИХ МАТЕРИАЛОВ НА ОТКРЫТЫХ СКЛАДАХ С ПРИМЕНЕНИЕМ ВОЗДУШНОГО ОПТИЧЕСКОГО СКАНИРОВАНИЯ С БЕСПИЛОТНЫХ АВИАЦИОННЫХ КОМПЛЕКСОВ | 2016 |
|
RU2646538C1 |
| МОДЕРНИЗИРОВАННАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ АЭРОФОТОСЪЕМКОЙ ДЛЯ ПИЛОТИРУЕМЫХ ВОЗДУШНЫХ СУДОВ (МБСУ АФС) | 2016 |
|
RU2646539C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОЙ КАЛИБРОВКИ ФОТОКАМЕР | 2006 |
|
RU2308001C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| Фотограмметрический способ определения объема насыпи в закрытых складах | 2021 |
|
RU2788855C2 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| Способ геодезического мониторинга деформационного состояния земной поверхности на территории разрабатываемых открытым способом крупных рудных месторождений с применением технологии лазерного сканирования | 2018 |
|
RU2698411C1 |
Изобретение относится к области геодезического контроля в дорожно-строительной отрасли. Способ проведения мониторинга дорожного полотна автомобильных дорог характеризуется тем, что создают высокоточную растровую 3D-модель при помощи стереосъемки цифровыми фотокамерами и спутниковым оборудованием. При этом для стереосъемки используют три цифровые фотокамеры, две фотокамеры монтируют на концах горизонтального базиса, а третью устанавливают между ними и смещают по высоте, стереосъемка производится в динамике, для определения координат центров фотографирования используют три комплекта спутниковых приемников. Фотограмметрическую обработку осуществляют путем построения геометрических моделей по каждому триплету снимков без построения общей фототриангуляционной сети в системе координат, заданной координатами центров фотографирования, 3D модели местности строят по каждому триплету в едином координатном пространстве. Технический результат – повышение производительности проведения съемки, а также обеспечение построения непрерывной высокоточной растровой 3D-модели дорожного полотна. 2 табл., 2 ил.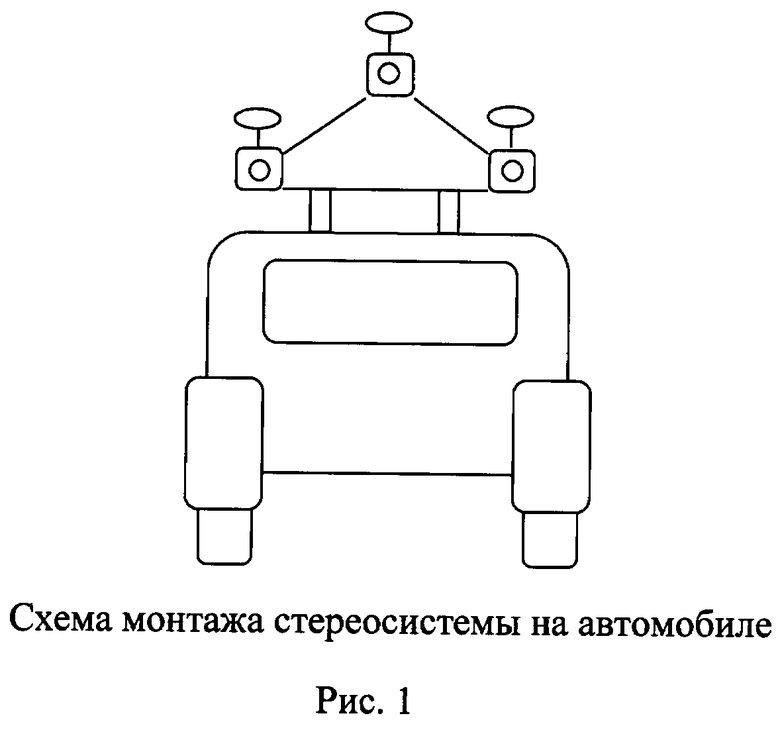
Способ проведения мониторинга дорожного полотна автомобильных дорог, при котором создают высокоточную растровую 3D-модель при помощи стереосъемки цифровыми фотокамерами и спутниковым оборудованием, отличающийся тем, что для стереосъемки используют три цифровые фотокамеры, две фотокамеры монтируют на концах горизонтального базиса, а третью устанавливают между ними и смещают по высоте, стереосъемка производится в динамике, для определения координат центров фотографирования используют три комплекта спутниковых приемников, фотограмметрическую обработку осуществляют путем построения геометрических моделей по каждому триплету снимков без построения общей фототриангуляционной сети в системе координат, заданной координатами центров фотографирования, 3D модели местности строят по каждому триплету в едином координатном пространстве.
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
| Способ расширения забоя шпуров | 1948 |
|
SU79109A1 |
| СПОСОБ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ПОВЕРХНОСТИ ПОКРЫТИЯ ДОРОЖНОЙ ОДЕЖДЫ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400594C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| US 9863928 B1, 09.01.2018 | |||
| JP 2012177675 A, 13.09.2012. | |||

