Предлагаемое изобретение относится к механизмам для управления летательных аппаратов аэродинамическими поверхностями и также затрагивает устройства, предотвращающие повреждение механизмов.
В настоящее время, для приведения в действие аэродинамических поверхностей управления, используются привода с преобразованием вращательного действия в поступательное движение с помощью шарико-винтовой передачи (ШВП). Известно, что подобные передачи критичны к ударам. Особенно сильные удары возникают в случае, когда аэродинамические поверхности до применения изделия сложены с целью уменьшения его габаритных размеров, а перед применением раскладываются за ограниченное время. В момент установки таких поверхностей на упор, моменты инерции поверхностей передаются на ШВП и эти моменты в несколько раз могут превышать шарнирные моменты, оказываемые на поверхность воздушными потоками.
Прототипом такого устройства является устройство, описанное в журнале «Точно в цель» №4 (24) 2020 г, стр. 61-73. Прототип содержит горизонтальную ось с которой жестко закреплена аэродинамическая поверхность, которая устанавливается в рабочее состояние электроприводом одного действия. Эта ось через подшипник закреплена на вертикальной оси, которая жестко через плечо связана с осью ШВП. Ось ШВП соединена с осью электропривода, которая выполняет поворот аэродинамической поверхности зависимой от управляющего воздействия. Его недостатком является низкая защищенность ШВП от ударов.
Известными элементами предлагаемого механизма являются: электропривод поворота поверхности из сложенного в рабочее состояние, электропривод управления с ШВП.
Новизна заключается в дополнительном оснащении механизма пружинным тормозом с вилкой и замком, которая удерживает вертикальную ось от вращения при выключенном электродвигателе.
Благодаря наличию отличительных признаков в совокупности с известными, обеспечивается возможность предотвращение повреждения ШВП ударными нагрузками. С этой целью предложен механизм соединения ШВП с аэродинамической поверхностью в момент постановки поверхности на упор. При нахождении поверхности в сложенном состоянии и при ее движении на упор, ШВП с поверхностью не связаны и вступают в жесткое соединение только при постановке поверхности на упор. Изобретение поясняется фиг. 1 и фиг. 2.
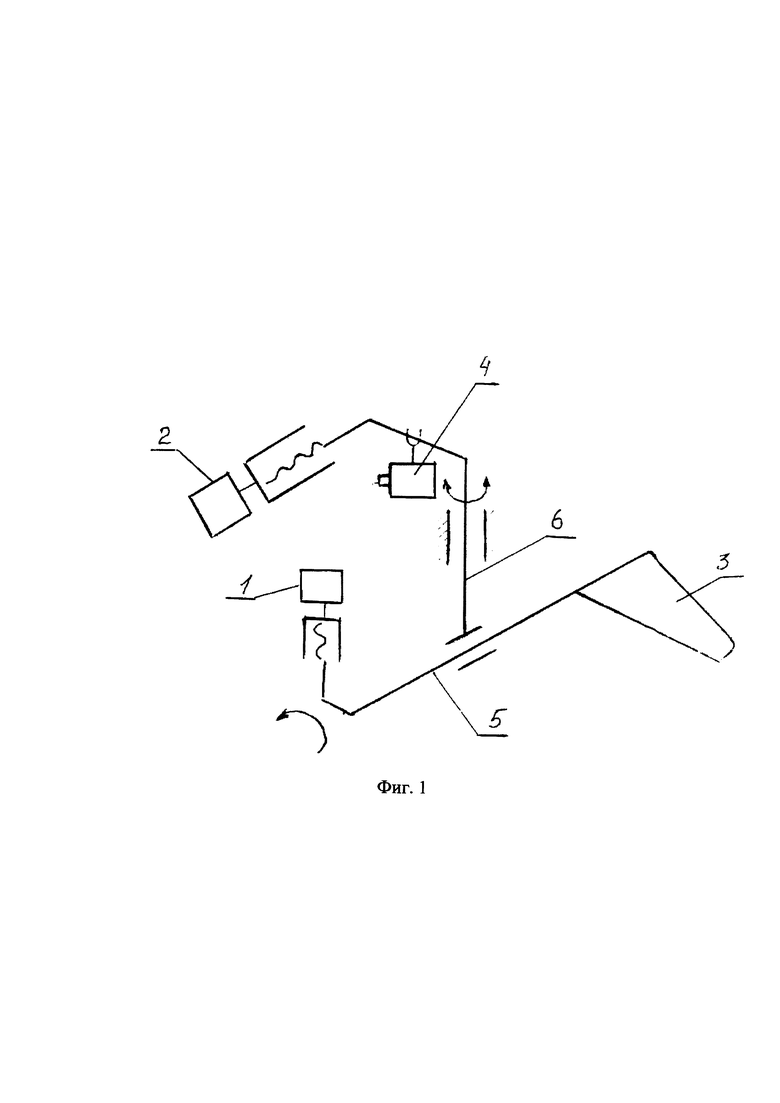
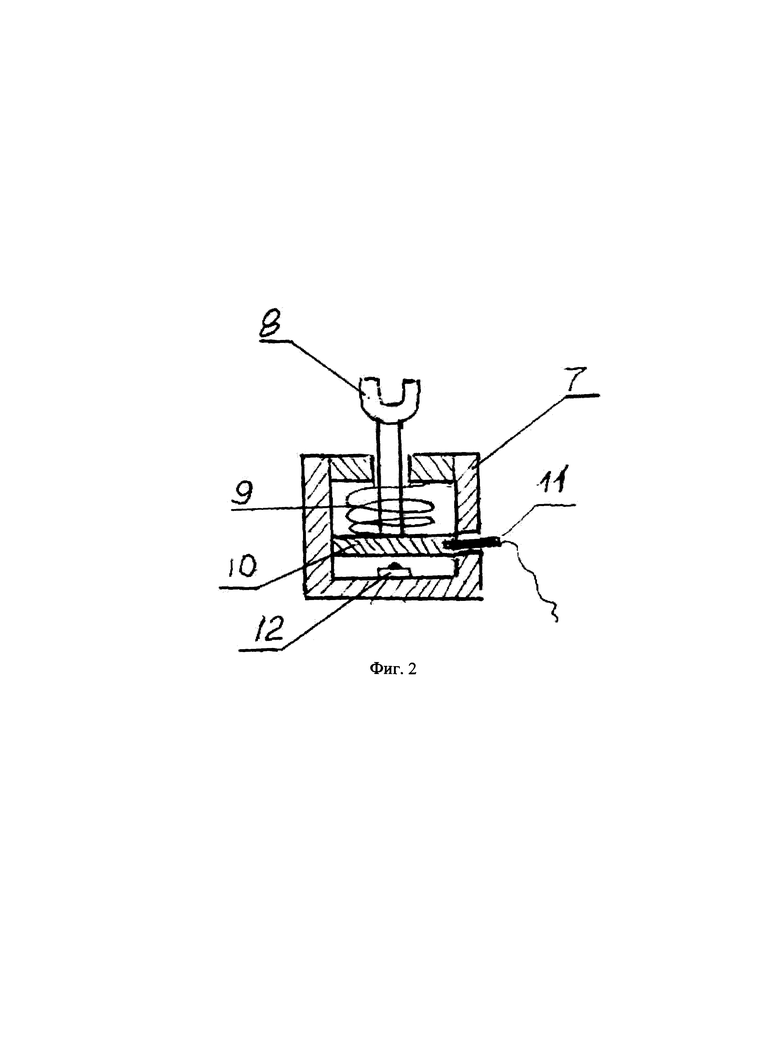
Кинематическая схема механизма для приведения в действие поверхностей управления приведена на фигуре 1. На фигуре 2 приведена схема тормоза механизма для приведения в действие поверхностей управления.
Механизм для приведения в действие поверхностей управления включает в себя: электропривод 1 (фиг. 1) поворота аэродинамической поверхности из сложенного состояния в рабочее состояние, электропривод управления 2 (фиг. 1), аэродинамическую поверхность 3 (фиг. 1), тормоз 4 (фиг. 1), горизонтальную ось 5 (фиг. 1), вертикальную ось 6 (фиг. 1), корпус тормоза 7 (фиг. 2), вилку 8 (фиг. 2), пружину 9 (фиг. 2), поршень 10 (фиг. 2), замок 11 (фиг. 2), концевой выключатель 12 (фиг. 2).
В качестве электропривода 1 может использоваться предварительно напряженная пружина с замком. В качестве электропривода управления 2 используется электропривод с шарнирно-винтовой передачей. В качестве тормоза 4 также используется предварительно напряженная пружина с замком.
В исходном состоянии пружина 9 электропривода 1 удерживает аэродинамическую поверхность 3 в сложенном состоянии. При этом вилка 8 тормоза 4 прижатая пружиной 9 удерживает вертикальную ось 6 от вращения. Электропривод 1 при этом находится в выключенном состояние и вертикальная ось 6 не воспринимает нагрузок со стороны механизма. Всю нагрузку воспринимает тормоз 4. По срабатыванию замка 11 электропривода 1, энергия сжатой пружины 9 затрачивается на поворот аэродинамической поверхности 3 в рабочее состояние. Этот процесс длится несколько сотых секунды, большое угловое ускорение аэродинамической поверхности 3 является причиной жесткого удара при установке поверхности 3, имеющей инерционную массу, в конечное положение. Энергию удара гасится тормозом 4, замок 11 пружины 9 которого, при установке на упор аэродинамической поверхности 3, срабатывает, подпружиненный поршень 10 с вилкой 8 перемещается и вертикальная ось 6 выходит из зацепления с тормозом 4. При этом поршень 10 задействует концевой выключатель 12 и происходит включение электропривода 1 ШВП. Тем самым обеспечивается уменьшенное воздействие на вертикальную ось 6. Тормоз 4 удерживает от вращения вертикальной осью 6 управления в вилке 8. Вилка 8 прижата пружиной 9 к плечу жестко связанному с вертикальную ось 6. Замок 11, удерживающий пружину 9 в сжатом состоянии, представляет собой чеку, которая соединяет поршень тормоза 4 с корпусом тормоза 7. Чека с горизонтальным осью 5 соединена через трос, который при повороте горизонтальной оси 5 наматывается на него укорачиваясь и при этом вытаскивает чеку из поршня тормоза 4. Поршень тормоза 4, связанный с вилкой 8 под действием пружины 9 разъединяет вертикальный ось 6 от связи с вилкой 8 и приводит в действие концевой выключатель 12, который управляет подачей напряжения на электропривод 1 ШВП.
За счет гашения нагрузки, действующей на ШВП через плечо вертикальной оси 6, существенно снижается ударная нагрузка на горизонтальную ось 5 ШВП и тем самым повышается надежность шарнирно-винтовой передачи. Применение пружинного тормоза с замком увеличивает габариты механизма не значительно. При этом появляется возможность выполнения вилки с демпфером в виде обрезиненной вилки, что снижает также нагрузки, действующие на поверхность. Установка демпфера на горизонтальную ось 5 ШВП не допустима, поскольку при этом в контур управления вводится дополнительно звено, снижающее запас по фазе системы управления изделием.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| Способ демпфирования удара на электропривод | 2023 |
|
RU2821603C1 |
| АВТОМОБИЛЬНАЯ ПРИЦЕПНАЯ СИСТЕМА КУЩЕНКО В.А. | 2009 |
|
RU2427497C2 |
| ДИСКОВЫЙ ТОРМОЗ С ЗАМКОМ, ФИКСИРУЮЩИМ ПРЕОБРАЗУЮЩИЙ ДВИЖЕНИЕ ПАТРОН | 2011 |
|
RU2539436C2 |
| СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД ШПАЛЬНОГО ИСПОЛНЕНИЯ | 2023 |
|
RU2816416C1 |
| Замок дверной с электроприводом | 2022 |
|
RU2796446C1 |
| СКЛАДНОЙ ТРЕХКОЛЕСНЫЙ ВЕЛОСИПЕД ДЛЯ РАЗНЫХ УРОВНЕЙ ПОДГОТОВКИ С МЕХАНИЗМОМ РАЗЪЕДИНЕНИЯ ОДНИМ ДВИЖЕНИЕМ, ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ СВОБОДНОГО ПОВОРОТА РУЛЯ И СВОБОДНОГО ВРАЩЕНИЯ ВЕДУЩЕГО КОЛЕСА | 2012 |
|
RU2605133C2 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| УСТРОЙСТВО АТТРАКЦИОНА | 2005 |
|
RU2281801C1 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2011 |
|
RU2479467C2 |
Предлагаемое изобретение относится к механизмам для управления летательных аппаратов аэродинамическими поверхностями и также затрагивает устройства, предотвращающие повреждение механизмов. Предложен механизм для приведения в действие поверхностей управления, содержащий привод поворота аэродинамической поверхности из сложенного состояния в состояние рабочее относительно горизонтальной оси и электропривод управления с шарико-винтовой передачей, осуществляющий вращение аэродинамической поверхности относительно вертикальной оси, отличающийся тем, что дополнительно механизм оснащен пружинным тормозом. Пружинный тормоз выполняет функцию снижения ударных нагрузок на ШВП и представляет собой подпружиненный поршень с вилкой, удерживающей вертикальную ось от вращения и замок. Замок представляет собой чеку, которая через трос связана с горизонтальной осью и при его повороте тросом выдергивается из поршня, освобождая его от корпуса тормоза. При этом вилка поршня выходит из зацепления с вертикальной осью, а поршень, двигаясь под действием сжатой пружины, вводит в действие концевой выключатель, который включает электропривод шарико-винтовой передачи. Благодаря наличию отличительных признаков в совокупности с известными, обеспечивается возможность предотвращения повреждения шарико-винтовой передачи ударными нагрузками. 2 ил.
Механизм для приведения в действие поверхностей управления, содержащий привод поворота аэродинамической поверхности из сложенного состояния в состояние рабочее относительно горизонтальной оси и электропривод управления с шарико-винтовой передачей (ШВП), осуществляющий вращение аэродинамической поверхности относительно вертикальной оси, отличающийся тем, что дополнительно механизм оснащен пружинным тормозом с замком, который срабатывает при установке аэродинамической поверхности в рабочее положение, причем замок представляет собой чеку, которая удерживает подпружиненный поршень с вилкой, удерживающей вертикальную ось от вращения, горизонтальная ось при этом соединена с чекой через трос, который при повороте горизонтальной оси укорачивается, наматываясь на него, и тем самым выдергивает чеку, в результате чего поршень с вилкой освобождаются от вертикальной оси и, перемещаясь, вводят в действие концевой выключатель, сигналом с которого включается электропривод ШВП.
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1991 |
|
RU2042574C1 |
| CN 112977804 A, 18.06.2021 | |||
| Покрытие здания | 1982 |
|
SU1086090A1 |
| Падающий молот | 1936 |
|
SU50514A1 |
| Дождевальная машина кругового действия | 1977 |
|
SU679187A1 |

