Предлагаемое изобретение относится к механизмам для управления летательных аппаратов аэродинамическими поверхностями и также затрагивает устройства, предотвращающие повреждение механизмов.
В настоящее время для приведения в действие аэродинамических поверхностей управления используются привода с преобразованием вращательного действия в поступательное движение с помощью шарико-винтовой передачи (ШВП). Известно, что подобные передачи критичны к ударам от механизма раскладки аэродинамических поверхностей. Особенно сильные удары возникают в случае, когда аэродинамические поверхности до применения изделия сложены с целью уменьшения его габаритных размеров, а перед применением раскладываются за ограниченное время. В момент установки таких поверхностей на упор, моменты инерции поверхностей передаются на ШВП и эти моменты в несколько раз могут превышать шарнирные моменты, оказываемые на поверхность воздушными потоками. Аналог такого устройства описан в журнале «Точно в цель» №4 2020 г., стр. 61-73. Прототип содержит горизонтальную ось с которой жестко закреплена аэродинамическая поверхность, которая устанавливается в рабочее состояние приводом одного действия. Эта ось через подшипник закреплена на вертикальной оси, которая жестко через плечо связана с ШВП. Вал ШВП соединен с валом электропривода, который выполняет поворот аэродинамической поверхности. Его недостатком является низкая защищенность ШВП от ударов. С целью уменьшения ударов на электропривод применяется механическое демпфирование. Примером является устройство по патенту №2775318 «Амортизатор в механизме раскладки аэродинамических поверхностей». Известны также способы демпфирования ударов, использующие электродинамические демпферы. Электродинамический способ демпфирования удара на электропривод предполагает установку электропривода на дополнительный электродинамический демпфер, например, на электромагнит. Этот способ и выбран в качестве прототипа.
Недостатком данного способа демпфирования является увеличение габаритов электропривода.
С целью уменьшения габаритов привода предлагается способ электродинамического демпфирования, в котором в качестве электродинамического демпфера может выступать тот же электродвигатель привода аэродинамической поверхности. При этом используется регулирование электрического тока, питающего электродвигатель. Как известно, полоса пропускания регуляторов положения аэродинамической поверхности лежит в диапазоне частот от единиц герц до нескольких десятков герц, а полоса пропускания регуляторов тока может составлять десятки килогерц. Разница собственных частот этих регуляторов позволяет в качестве электродинамического демпфера использовать электрический привод аэродинамической поверхности. При этом контур управления летательным аппаратом выполнит функцию фильтрации колебаний электрического тока в электродвигателе. Фактически при этом способе энергия удара будет преобразована в тепловую энергию электродвигателя. Причем, частота колебаний тока может быть больше эквивалентной частоты удара, определяемой фронтом нарастания ударной нагрузки. В большинстве случаев этот фронт длится не менее 5 миллисекунд, а частота пропускания контура управления током двигателя может составлять десятки килогерц.
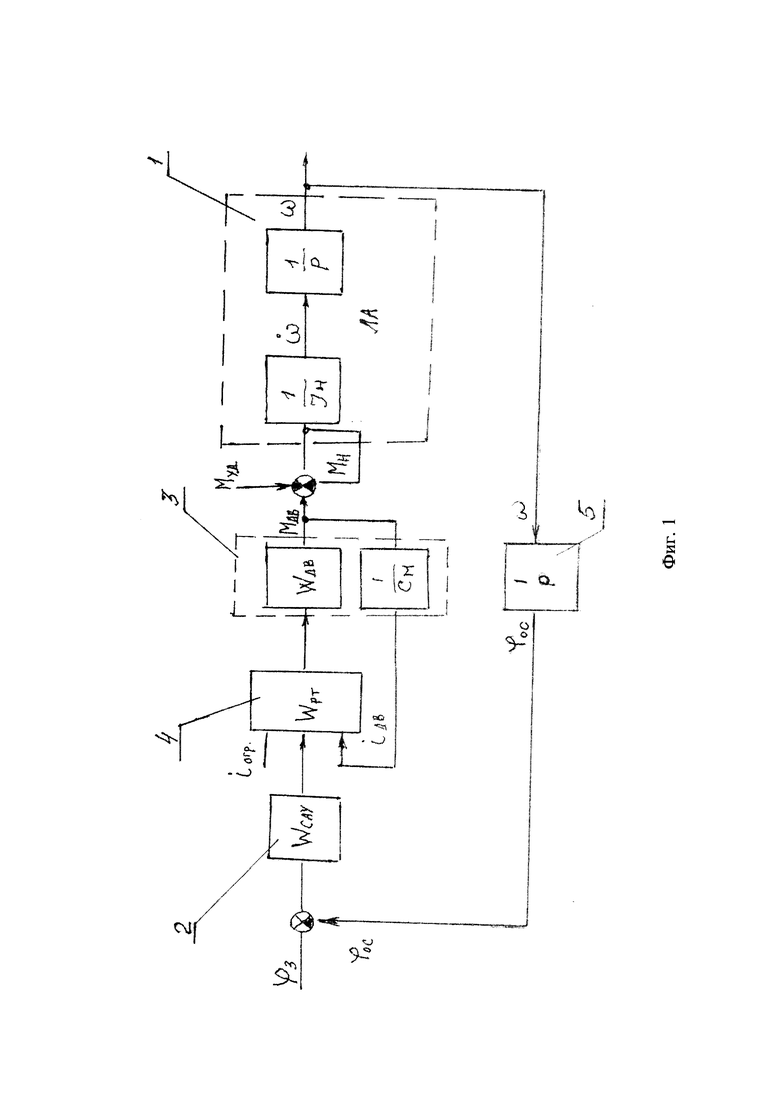
Изобретение поясняется фиг. 1.
На фиг. 1 представлена структурная схема летательного аппарата (ЛА) 1, включающая суммарный момент инерции ЛА и управляющей аэродинамической поверхности Jn и два интегратора 1/p, которые преобразуют угловое ускорение в угловую скорость и в угол поворота ЛА. Угловая скорость ЛА измеряется датчиком угловой скорости, интегрируется по цепи отрицательной связи поступает на один из входов системы управления 2 ЛА (передаточной функцией WС АА), которая обеспечивает регулирование тока электродвигателя в штатном режиме. В режиме демпфирования удара эта система выполняет функцию удержания аэродинамической поверхности около начального положения. При этом аэродинамическая поверхность, благодаря регулированию тока в двигателе 3 (с передаточной функцией WДВ) дополнительным регулятором 4 (с передаточной функцией WPT), может совершать колебательные движения с предельно малой амплитудой и частотой на порядок большие собственной частоты упругих колебаний ЛА. На фиг. 1 приведены параметры электродвигателя: см - коэффициент передачи между моментом и током, а также R - сопротивление обмотки двигателя. Тем самым показано, что здесь обеспечивается обратная связь по току. Частота колебаний тока двигателя в этом режиме может составлять десятки килогерц. Регулирование тока при этом обеспечивается за счет удержания его в диапазоне, не превышающем по амплитуде предельное для данного двигателя iогр. При ударе, если двигатель лишен дополнительного контура регулирования тока, будучи замкнутым по цепи обратной отрицательной связи, в двигателе возникнет запредельное значение тока, которое приведет к запредельному моменту на его валу, что и приведет к жесткому удару. Контур регулирования тока выполнит функцию «токовой отсечки», которая обеспечит уменьшение тормозящего момента двигателя и тем самым обеспечит уменьшение удара. Длительность удара определит длительность работы дополнительного контура управления током. При этом, на вход дополнительного регулятора тока подается сигнал iогр. Причем дополнительный контур регулирования тока должен обеспечить отрицательную обратную связь по отношению к сигналу регулятора 2.
Уменьшение тормозящего момента на валу управляющего двигателя, который противоположен моменту от удара, в течение длительности удара, позволяет уменьшить ударную нагрузку на шток привода, за счет преобразования энергии удара в энергию электрическую в якоре двигателя, которая переходит в энергию тепловую. При этом колебания тока в двигателе с высокой частотой поддерживаются в течение длительности удара, а затем этот контур отключается.
В предложенном способе отсутствует дополнительное устройство, а электродинамическое демпфирование обеспечивается дополнительным контуром регулирования тока в управляющем двигателе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для приведения в действие поверхностей управления | 2021 |
|
RU2763094C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| Электропривод | 1991 |
|
SU1835588A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СЛАБОДЕМПФИРОВАННОГО НЕУСТОЙЧИВОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581787C2 |
| Регулятор амплитуды колебаний в контуре управления направлением движения летательного аппарата | 2022 |
|
RU2788621C1 |
| Электропривод | 1978 |
|
SU790090A1 |
| Аэроэлектроподъемный летательный аппарат | 2018 |
|
RU2696051C1 |
| Устройство для регулирования аэродинамического сопротивления транспортного средства | 1990 |
|
SU1731674A1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| ЖИДКОСТНОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ И ДЕМПФИРОВАНИЯ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2015 |
|
RU2595183C1 |
Изобретение относится к области машиностроения, а более конкретно к демпфированию удара в механизмах. Способ демпфирования удара на электропривод использует электродинамическое демпфирование удара от механизма раскладки аэродинамических поверхностей летательного аппарата. В качестве демпфера используют дополнительное регулирование тока в управляющем электродвигателе. Обеспечивается ограничение тока в течение длительности удара. После чего этот контур отключают, тем самым на время длительности удара управляющий двигатель переводится в режим электромагнита, выполняющего функцию электромагнитного демпфера. Достигается уменьшение габаритов привода. 1 ил.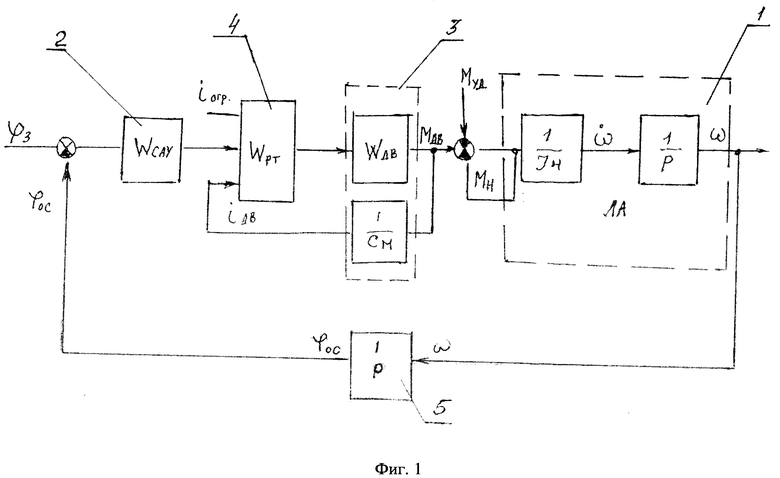
Способ демпфирования удара на электропривод, использующий электродинамическое демпфирование удара от механизма раскладки аэродинамических поверхностей летательного аппарата, отличающийся тем, что в качестве демпфера используют дополнительное регулирование тока в управляющем электродвигателе такое, которое обеспечивает ограничение тока в течение длительности удара, и, как следствие, ограничение тормозящего момента, противодействующего моменту удара, после чего этот контур отключают, тем самым на время длительности удара управляющий двигатель переводится в режим электромагнита, выполняющего функцию электромагнитного демпфера.
| US 2022009616 A1, 13.01.2022 | |||
| Амортизатор | 1984 |
|
SU1272029A1 |
| US 4361410 A1, 30.11.1982 | |||
| DE 60302861 D1, 26.01.2006 | |||
| Электродинамический упругий элемент | 1975 |
|
SU579477A2 |
| Амортизатор на основе линейного электродвигателя | 2021 |
|
RU2763617C1 |
| РЕКУПЕРАТИВНЫЙ АМОРТИЗАТОР НА ОСНОВЕ ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2023 |
|
RU2799872C1 |

