Изобретение относится к системам управления летательными аппаратами.
Известна система, в которой электродистанционный канал обеспечивает не только передачу команд летчику, но и выполняет функции загружающего устройства и компенсатора трения резервной механической проводки.
Недостатком системы является низкая устойчивость при малых градиентах загрузки рычага управления, обеспечиваемых электродистанционным каналом. Повышение устойчивости традиционными методами (установкой фильтров в цепи прохождения электрических сигналов, уменьшением добротности сервопривода и т. п.) приводит к увеличению фазового запаздывания, что в ряде случаев может оказаться неприемлемым.
Целью изобретения является повышение устойчивости системы при малых градиентах загрузки рычага управления.
Цель достигается тем, что в системе управления летательным аппаратом, содержащей рычаг управления, электродистанционный канал управления, включающий вычислитель, сервопривод и датчик усилий, установленный между рычагом и проводкой управления, и механический канал управления, включающий проводку управления и резервную загрузочную пружину и привод руля, параллельно рычагу управления к датчику усилий подсоединено пружинное устройство отрицательной жесткости, а градиент загрузки, обеспечиваемый электродистанционным каналом, равен сумме градиента загрузки рычага управления и градиента пружинного устройства отрицательной жесткости, выполненного в виде шарнирно соединенных между собой пружины и качалки, оси которых совпадают при нейтральном положении рычага, а усилие на пружине в нейтральном положении максимальное.
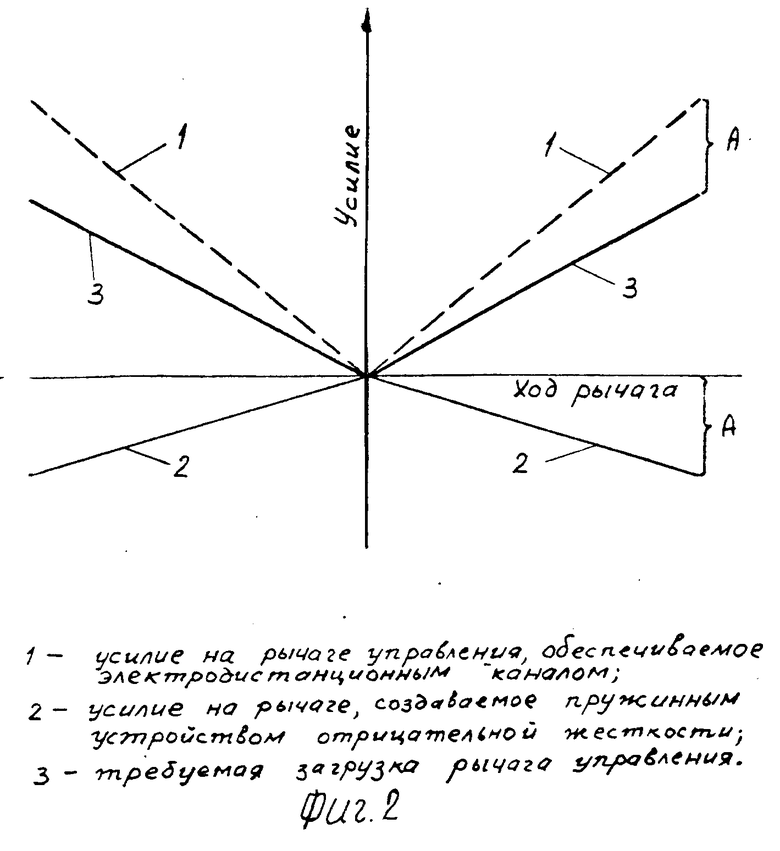
На фиг. 1 показана предлагаемая система; на фиг. 2 зависимость усилия на рычаге от хода рычага.
Система управления содержит рычаг 1 управления, связанный механической проводкой 2 с золотниковой тягой рулевого привода 3, вычислитель 4, сервопривод 5, параллельно подключенный к золотниковой тяге и электрический связанный с датчиком 6 усилий, встроенным в проводку управления, резервную загрузочную пружину 7 и пружинное устройство 8 отрицательной жесткости, состоящее из предварительно сжатой пружины 9 и качалки 10, ось которой совпадает с осью пружины при нейтральном положении рычага управления.
Система работает следующим образом.
В нейтральном положении рычага 1 управления усилие пружины 9 замкнуто на качалку 10, ось которой совпадает с осью пружины в нейтральном положении, и не передается на датчик 6 усилий.
При приложении летчиком усилия к рычагу управления и смещении его от нейтрали на пружинном устройстве возникает усилие, направленное на отклонение рычага от нейтрали (совпадающее по направлению с усилием летчика).
Усилия летчика и пружинного устройства, складываясь, деформируют упругий элемент датчика 6 усилий. Датчик вырабатывает сигнал, пропорциональный суммарному усилию, который через вычислитель 4 поступает на сервопривод 5.
Сервопривод перемещает механическую проводку 2 и связанные с ней рычаг 1 управления и золотник рулевого привода 3.
Градиент загрузки рычага управления (отношение усилия к ходу), обеспечиваемый электродистанционным каналом, выбирается из условия устойчивой работы системы (1 на фиг. 2).
Градиент пружинного устройства отрицательной жесткости (2 на фиг. 2) выбирается таким, чтобы градиент, обеспечиваемый электродистанционным каналом, был равен сумме требуемого градиента усилий (3 на фиг. 2) и градиента пружинного устройства отрицательной жесткости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ГИДРОДИСТАНЦИОННОЙ СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1992 |
|
RU2063366C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1372816A1 |
| МЕХАНИЗМ ВКЛЮЧЕНИЯ В ПРОВОДКУ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ФУНКЦИОНАЛЬНОГО УСТРОЙСТВА | 2005 |
|
RU2288134C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С СЕКЦИОНИРОВАННЫМ РУЛЕМ | 1988 |
|
SU1596623A1 |
| УСТРОЙСТВО ДЛЯ НОЖНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2177896C2 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ ТРОСОВ СИСТЕМЫ УПРАВЛЕНИЯ | 2000 |
|
RU2180640C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАКРЫЛКАМИ САМОЛЕТА | 1992 |
|
RU2065377C1 |
| РУКОЯТКА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1994 |
|
RU2100255C1 |
| РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2018459C1 |
Изобретение относится к авиационной технике, а именно к системам управления летательными аппаратами. Цель изобретения обеспечение устойчивости системы при малых градиентах загрузки рычага управления. Цель достигается тем, что параллельно рычагу 1 управления к датчику 6 усилий подсоединено пружинное устройство 8 отрицательной жесткости, а градиент загрузки, обеспечиваемый электродистанционным каналом, равен сумме градиента загрузки рычага управления и градиента пружинного устройства отрицательной жесткости, причем пружинное устройство 8 выполнено в виде шарнирно соединенных между собой пружины 9 и качалки 10, оси которых совпадают при нейтральном положении рычага, причем усилие на пружине в нейтральном положении максимальное. 1 з. п. ф-лы, 2 ил.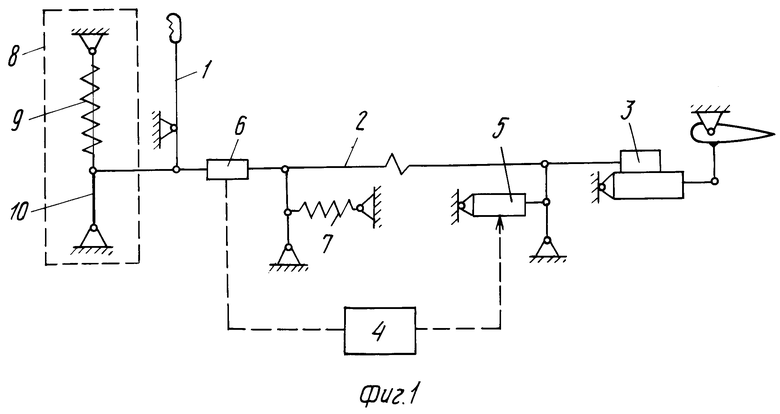
| Склянский Ф.И | |||
| Управление сверхзвукового самолета | |||
| М.: Машиностроение, 1964, с.317. |
