Область техники, к которой относится изобретение
Изобретение относится к способам и системам опознавания различных видов целей типа «свой - чужой», а именно к опознаванию малогабаритных робототехнических средств.
Уровень техники
а) Описание аналогов способа
Известен способ опознавания объектов, реализованный в системе опознавания на поле боя BCIS (Политов И. Системы опознавания «свой - чужой» ОБТ «Абрамс» и БМП «Брэдли». - Зарубежное военное обозрение, №7, 2001. - С.24-26 - режим доступа http://militaryarticle.ru/zarubezhnoe-voennoe-obozrenie/2001-zvo/6828-sistemy-opoznavanija-svoj-chuzhoj-obt-abrams-i-bmp). В данном способе:
сигнал запроса, модулированный по частоте специальным кодом, передают по радиолокационному каналу, с помощью которого опознаваемый объект был предварительно обнаружен;
принимают и декодируют сигнал запроса аппаратурой, размещенной на борту опознаваемого объекта, излучают кодированный ответный сигнал;
принимают, декодируют и проверяют на подлинность ответный сигнал на борту идентифицирующего объекта.
Недостатками данного способа являются низкая скрытность работы системы и снижение эффективности опознавания объектов в условиях воздействия преднамеренных помех.
Известен способ опознавания объектов (Пат. RU 2386144 С1, МПК G01S 13/78. Способ опознавания «свой - чужой» / Варин А.П., Григорьев С.И., Калинин Н.В. и др.; заявитель и патентообладатель ОАО «Концерн «Созвездие». - №2008137858/09; заявл. 22.09.2008; опубл. 10.04.2010, бюл. №10). В данном способе:
все «свои» объекты, объединенные в локальную информационно-управляющую систему, получают индивидуальными навигационными средствами информацию о собственных координатах;
перед нанесением удара объект, обнаруживший цель, отправляет в информационно-управляющую систему сигнал запроса, включающий информацию о координатах предполагаемой точки нанесения удара;
при получении сигнала запроса все объекты сравнивают данную информацию с собственными координатами;
те объекты, у которых их собственные координаты совпали с заранее заданной погрешностью с координатами точки нанесения удара, передают в локальную информационно-управляющую систему ответный сигнал, содержащий их собственные координаты в закодированном виде.
Недостатком указанного способа является высокая вероятность атаки «своего» объекта при высокой подвижности объектов и наличия задержек при передаче информации по локальной информационно-управляющей системе.
б) Описание аналогов системы
Известны системы опознавания объектов - см., например, Пат. RU 2189610 С1, МПК G01S 13/52. Система опознавания «свой - чужой» / Сивов В.А., Моисеев В.Ф.; заявитель и патентообладатель Военная академия ракетных войск стратегического назначения им. Петра Великого. - №2000132255/09; заявл. 22.12.2000; опубл. 20.09.2002; Пат. RU 2254596 С2, МПК G01S 13/78. Система опознавания подвижных объектов / Жуков В.М., Жуков М.В.; заявитель и патентообладатель ОАО «Уральское проектно-конструкторское бюро «Деталь». - №2003124994/09; заявл. 11.08.2003; опубл. 10.02.2005, бюл. №4.
Известные аналоги содержат запросчик, размещенный на идентифицирующем объекте, и ответчик, размещенный на опознаваемом объекте, связанные каналом радиосвязи. Общим недостатком аналогов является низкая устойчивость их функционирования в условиях действия преднамеренных радиопомех.
в) Описание ближайшего аналога (прототипа) способа
Наиболее близким по своей технической сущности (прототипом) к заявляемому способу опознавания малогабаритных робототехнических средств (МРТС) является способ координатно-связного опознавания (Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. С. 647-648). В данном способе:
для опознавания МРТС используют канал (подсистему) радиолокационного опознавания и канал (подсистему) координатно-связного опознавания, информация от которых объединяется процессором обработки данных в соответствии с реализованным в нем алгоритмом, с последующей выдачей решения об опознавании МРТС;
при радиолокационном опознавании запросчик идентифицирующего объекта, обнаружив МРТС, формирует и излучает кодированный запросный сигнал, ответчик опознаваемого объекта принимает его, декодирует, проверяет на подлинность, при подтверждении подлинности запросного сигнала ответчик формирует и излучает кодированный ответный сигнал, запросчик принимает кодированный ответный радиосигнал, декодирует его, проверяет на подлинность, при подтверждении подлинности ответного сигнала формируется признак принадлежности объекта к классу - «свой», в противном случае формируется признак принадлежности объекта к классу - «чужой», который подается в процессор обработки данных;
при координатно-связном опознавании идентифицирующий объект посредством имеющихся у него средств определяет пространственные координаты обнаруженного МРТС, все «свои» объекты получают индивидуальными навигационными средствами информацию о собственных пространственных координатах и обмениваются данной информацией по многофункциональной интегрированной системе связи, навигации и опознавания, идентифицирующие объекты отождествляют координаты обнаруженных опознаваемых объектов с координатами, полученными по многофункциональной интегрированной системы связи, навигации и опознавания.
Недостатком данного способа является снижение достоверности опознавания при значительном количестве опознаваемых объектов и, как следствие, высокой нагрузке на многофункциональную интегрированную систему связи, навигации и опознавания.
г) Описание ближайшего аналога (прототипа) системы
Интегрированная система опознавания (прототип) (Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. С. 649-650), в которой реализуется указанный выше способ координатно-связного опознавания, включает канал (подсистему) радиолокационного опознавания и канал (подсистему) координатно-связного опознавания, связанные с процессором обработки данных, причем каждый из каналов (подсистем) выделяет и оценивает соответствующие признаки, а процессор обработки данных в соответствии с реализованным в нем алгоритмом выносит окончательное решение о принадлежности объекта к одному из двух классов - «свой» или «чужой».
Недостатком данной системы является низкая устойчивость ее функционирования в условиях деструктивных воздействий.
Раскрытие изобретения
а) Технический результат, на достижение которого направлено изобретение
Целью изобретения является повышение устойчивости функционирования системы опознавания в условиях деструктивных воздействий, а также повышение достоверности опознавания «своего» МРТС при обнаружении нескольких объектов. Устойчивость функционирования системы опознавания повышается за счет использования высоко надежных технологий облачных вычислений, которые позволяют быстро восстанавливать информационные процессы подсистемы опознавания, как при первоначальном запуске МРТС, так и после различных сбоев, перерывов и т.п. Использование при этом виртуальных каналов и машин для опознавания обеспечивает скрытность работы системы и возможность передачи информации исходя из энергетической эффективности каналов связи. Степень достоверности решения о принадлежности объектов к классу «свой» или «чужой» повышается за счет использования для обработки информации нечетких лингвистических переменных и нечеткой логики.
б) Совокупность существенных признаков заявляемого способа
Сходными признаками заявляемого способа опознавания МРТС с известным способом (прототипом) координатно-связного опознавания являются следующие:
для опознавания МРТС используют подсистему радиолокационного опознавания и подсистему координатно-связного опознавания, данные от которых объединяются процессором обработки данных в соответствии с реализованным в нем алгоритмом, с последующей выдачей решения о принадлежности МРТС к одному из классов - «свой» или «чужой»;
при радиолокационном опознавании запросчик идентифицирующего объекта, обнаружив МРТС, формирует и излучает кодированный запросный сигнал, который ответчик опознаваемого объекта принимает, декодирует и проверяет на подлинность, при подтверждении подлинности которого ответчик формирует и излучает кодированный ответный сигнал, который запросчик принимает, декодирует и проверяет на подлинность, при подтверждении подлинности которого формируется признак принадлежности объекта к классу «свой», в противном случае - признак «чужой», который подается в процессор обработки данных;
при координатно-связном опознавании идентифицирующий объект посредством имеющихся у него средств определяет пространственные координаты обнаруженного МРТС.
Существенными отличительными признаками заявляемого способа опознавания МРТС от известного способа (прототипа) координатно-связного опознавания являются следующие:
на основе анализа условий функционирования подсистем оператор определяет режим радиолокационного, координатно-связного или совместного использования радиолокационного и координатно-связного опознавания;
вместо передачи запросного сигнала в режиме координатно-связного опознавания, либо одновременно с его передачей в режиме совместного использования радиолокационного и координатно-связного опознавания, запросчик формирует и передает по защищенному каналу в доверенную информационную систему, функционирующую с использованием технологий облачных вычислений (ИСОТ), запрос на опознавание, содержащий координаты обнаруженного МРТС, которое передает свои навигационные параметры в доверенную ИСОТ;
при получении запроса на опознавание ИСОТ, осуществляет отождествление координат опознаваемого МРТС, полученных от запросчика, с координатами, поступившими от МРТС;
при совпадении с заданной точностью координат опознаваемого МРТС с координатами «своего» объекта формируется признак принадлежности к классу «свой», в противном случае - признак «чужой», запросчику передается соответствующий ответ, который подается в процессор обработки данных.
Также существенными отличительными признаками заявляемого способа опознавания МРТС от известного способа координатно-связного опознавания являются следующие:
признак принадлежности объекта к классу «свой» в ИСОТ формируют с использованием алгоритмов вероятностного или нечеткого вывода;
объединяют данные, полученные от подсистем радиолокационного и координатно-связного опознавания, принимают решение о принадлежности МРТС к одному из классов - «свой» или «чужой», путем осуществления многомерной оптимизации целевой функции системы опознавания в пространстве нечетких множеств параметров.
в) Причинно-следственная связь между признаками способа и техническим результатом
Новая совокупность существенных признаков позволяет достичь указанного технического результата за счет обеспечения возможности выбора режима работы системы в зависимости от условий ее функционирования (помехоустойчивости, скрытности, энергетической эффективности), использования технологий облачных вычислений и систем нечеткого вывода.
г) Совокупность существенных признаков заявляемой системы
Сходными признаками заявляемой системы опознавания МРТС с известной системой (прототипом) координатно-связного опознавания являются следующие:
система содержит связанные с процессором обработки данных запросчика подсистему радиолокационного опознавания, включающую связанные каналом радиосвязи модуль радиолокационного опознавания запросчика, размещенного на идентифицирующем объекте, и модуль радиолокационного опознавания ответчика, размещенного на опознаваемом МРТС, и подсистему координатно-связного опознавания, включающую модуль координатно-связного опознавания запросчика и навигационный модуль по меньшей мере одного опознаваемого МРТС, причем каждая из подсистем выделяет и оценивает соответствующие признаки принадлежности объекта к одному из классов - «свой» или «чужой».
Существенными отличительными признаками заявляемой системы опознавания МРТС от известной системы (прототипа) координатно-связного опознавания являются следующие:
в подсистему координатно-связного опознавания дополнительно введены ИСОТ и по меньшей мере один пользовательский терминал, причем запросчик идентифицирующего объекта связан по защищенному каналу связи с доверенной ИСОТ, навигационный модуль по меньшей мере одного опознаваемого МРТС также связан по защищенному каналу с доверенной ИСОТ, с которой связан по защищенному каналу по меньшей мере один пользовательский терминал;
ИСОТ обеспечивает вероятностное или нечеткое отождествление координат МРТС, полученных от запросчика, с известными координатами «своего» МРТС;
процессор обработки данных осуществляет принятие нечеткого решения о принадлежности МРТС к одному из классов - «свой» или «чужой»;
пользовательский терминал предназначен для контроля состояния и управления системой.
д) Причинно-следственная связь между признаками системы и техническим результатом
Благодаря новой совокупности существенных признаков в системе реализована возможность опознавания МРТС с использованием технологий облачных вычислений. В условиях сложной помеховой обстановки и массового применения МРТС процесс опознавания объектов, заключающийся в отождествлении объектов к одному из классов - «свой» или «чужой», существенно затрудняется. Применение технологий облачных вычислений в информационной архитектуре системы опознавания МРТС позволит повысить устойчивость ее функционирования.
Доказательства соответствия заявляемого изобретения условиям патентоспособности «новизна» и «изобретательский уровень».
Выполненный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам, заявленных способа и системы опознавания МРТС, отсутствуют. Следовательно, каждое из заявленных изобретений соответствует условию патентоспособности «Новизна».
Результаты поиска известных решений в данной и смежных областях техники, с целью выявления признаков, совпадающих с отличительными от прототипов признаками каждого заявленного изобретения показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками каждого из заявленных изобретений на достижение указанного технического результата. Следовательно, каждое из заявленных изобретений соответствует по условию патентоспособности «Изобретательский уровень».
Краткое описание чертежей
Заявленные объекты изобретения поясняются чертежами, на которых:
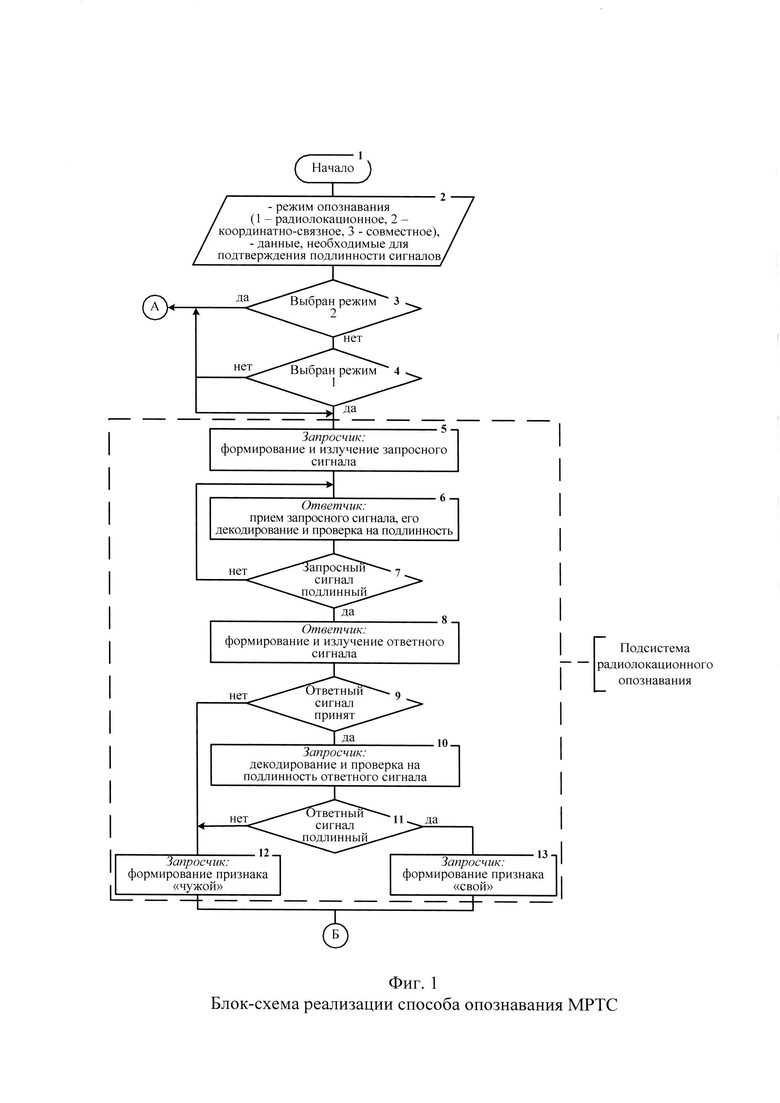
на фиг. 1 - блок-схема реализации способа опознавания малогабаритных робототехнических средств;
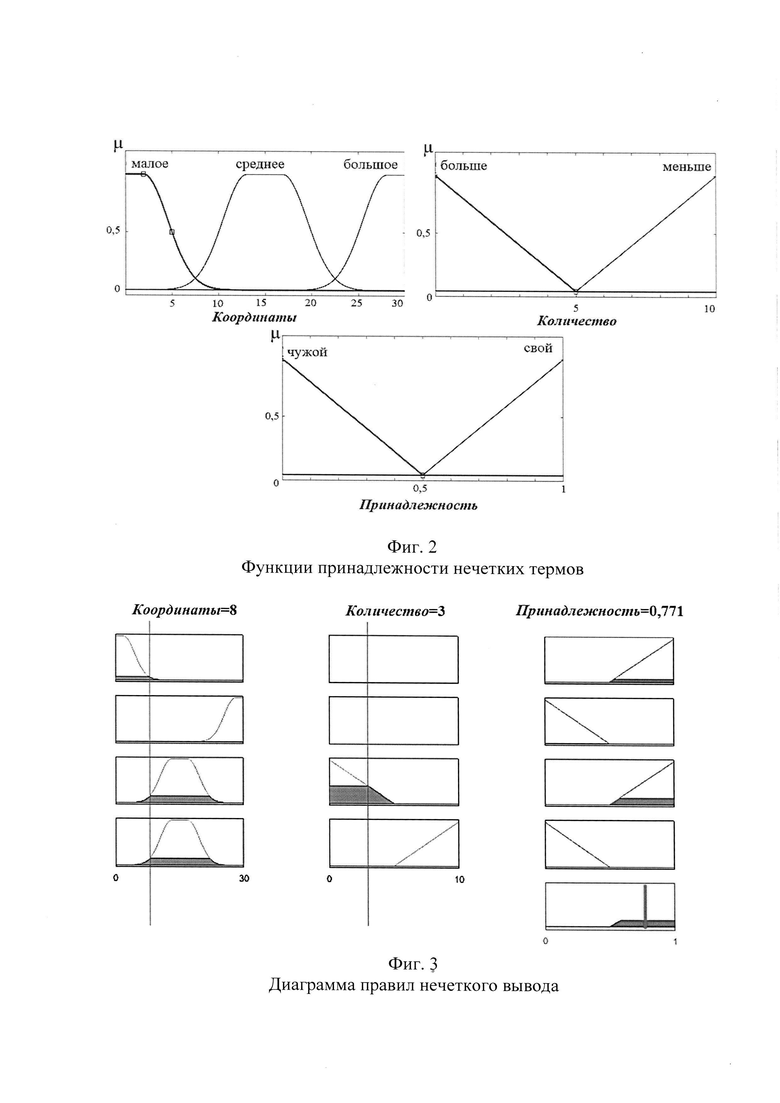
на фиг. 2 - функции принадлежности нечетких термов;
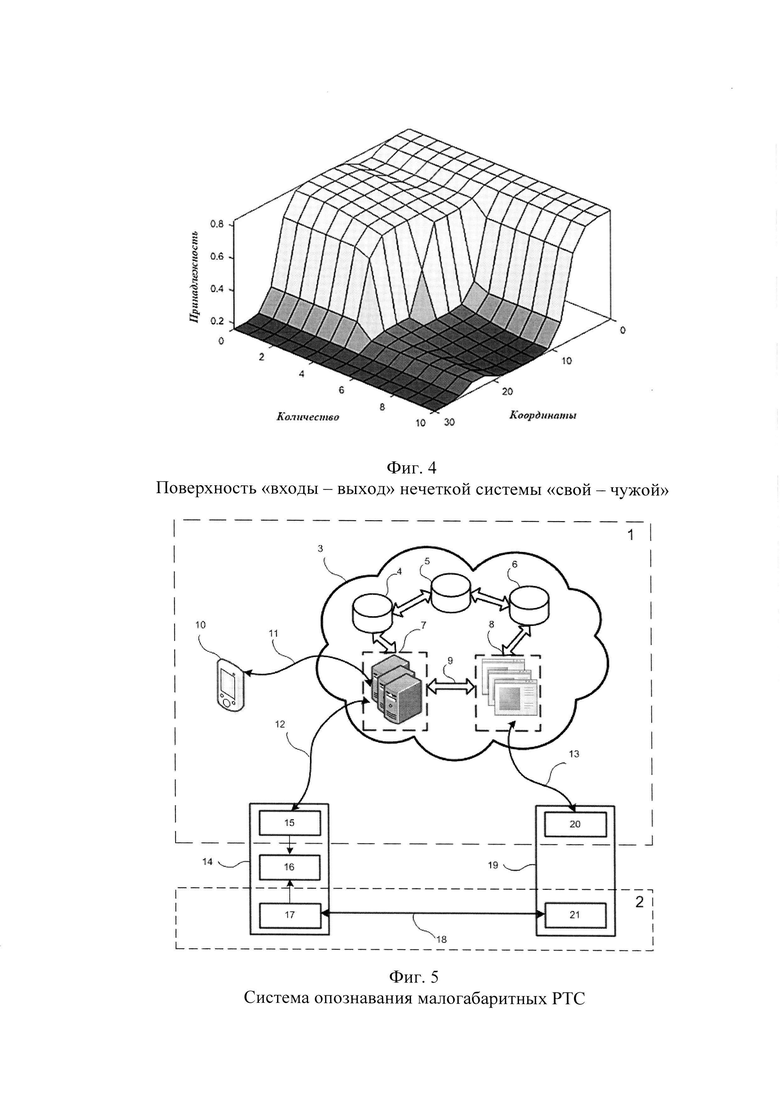
на фиг. 3 - диаграмма правил нечеткого вывода;
на фиг. 4 - поверхность «входы - выход» нечеткой системы «свой - чужой»;
на фиг. 5 - система опознавания малогабаритных робототехнических средств.
Осуществление изобретения
а) Осуществление заявляемого способа
Предлагаемый способ опознавания МРТС характеризуется использованием основной - радиолокационной подсистемы опознавания, и дополнительной - координатно-связной подсистемы опознавания, в функционировании которой задействуется ИСОТ.
На фиг. 1 представлена блок-схема реализации предлагаемого способа опознавания МРТС.
В зависимости от условий функционирования (энергетической эффективности, скрытности и помехоустойчивости каналов связи) выбирается режим работы системы (блоки 2-4 на фиг. 1):
- режим 1 - радиолокационное опознавание, характеризующееся использованием подсистемы радиолокационного опознавания (группа блоков 5-13 на фиг. 1);
- режим 2 - координатно-связное опознавание, характеризующееся использованием подсистемы координатно-связного опознавания (группа блоков 14-19 на фиг. 1);
- режим 3 - совместное использование радиолокационного и координатно-связного опознавания (фиг. 1).
Режим радиолокационного опознавания характеризуется следующей совокупностью действий:
1. Запросчик идентифицирующего объекта, обнаружив МРТС, формирует и излучает кодированный запросный сигнал (блок 5 на фиг. 1)
2. Ответчик МРТС принимает запросный сигнал, декодирует его и проверяет на подлинность (блок 6 на фиг. 1).
3. При установлении подлинности запросного сигнала (блок 7 на фиг. 1) ответчик формирует и излучает кодированный ответный сигнал (блок 8 на фиг. 1).
4. При получении кодированного ответного радиосигнала (блок 9 на фиг. 1) запросчик декодирует его и проверяет на подлинность (блок 10 на фиг. 1). При отсутствии ответного сигнала формируется признак принадлежности объекта к классу «чужой» (блок 12 на фиг. 1).
5. При подтверждении подлинности ответного сигнала (блок 11 на фиг. 1) формируется признак принадлежности объекта к классу «свой» (блок 13 на фиг. 1), в противном случае формируется признак принадлежности объекта к классу «чужой» (блок 12 на фиг. 1).
Режим координатно-связного опознавания характеризуется следующей совокупностью действий:
1. Все «свои» МРТС передают с заданной периодичностью информацию, содержащую их навигационные параметры, в доверенную ИСОТ (блок 14 на фиг. 1).
2. Запросчик посредством имеющихся у идентифицирующего объекта средств определяет пространственные координаты S обнаруженного МРТС (блок 15 на фиг. 1).
3. Запросчик формирует и передает по защищенному каналу в доверенную ИСОТ запрос на опознавание, содержащий координаты S обнаруженного МРТС (блок 16 на фиг. 1).
4. В ИСОТ при получении запроса на опознавание осуществляется отождествление координат S опознаваемого МРТС, полученных от запросчика, с координатами  полученными от «своего» МРТС (блок 17 на фиг. 1). При совпадении с заданной точностью координат S опознаваемого МРТС с координатами
полученными от «своего» МРТС (блок 17 на фиг. 1). При совпадении с заданной точностью координат S опознаваемого МРТС с координатами  «своего» объекта в ИСОТ формируется признак принадлежности объекта к классу «свой» (блок 19 на фиг. 1), в противном случае формируется признак принадлежности объекта к классу «чужой» (блок 18 на фиг. 1), и запросчику передается соответствующий признак принадлежности опознаваемого объекта (блок 20 на фиг. 1).
«своего» объекта в ИСОТ формируется признак принадлежности объекта к классу «свой» (блок 19 на фиг. 1), в противном случае формируется признак принадлежности объекта к классу «чужой» (блок 18 на фиг. 1), и запросчику передается соответствующий признак принадлежности опознаваемого объекта (блок 20 на фиг. 1).
Процессор обработки данных в соответствии с реализованным в нем алгоритмом объединяет информацию от различных подсистем опознавания (блок 21 на фиг. 1) и выдает сведения о принадлежности объекта к одному из классов - «свой» или «чужой» (блок 23 на фиг. 1).
В случае обнаружения нескольких объектов в целях повышения достоверности принимаемого решения отождествление координат МРТС, полученных от запросчика, с известными координатами «своего» МРТС, а также формирование признака принадлежности объекта к классу «свой» в ИСОТ (блоки 17, 18, 19 на фиг. 1) предлагается осуществлять с использованием алгоритмов вероятностного или нечеткого вывода.
Вероятностный вывод предлагается осуществлять с использованием байесовского подхода, который дает возможность проверять и корректировать принимаемое решение о принадлежности МРТС к классу «свой» при поступлении новых результатов отождествления координат (Кремер Н.Ш. Теория вероятностей и математическая статистики: Учебник для вузов. - 2-е изд., перераб. и доп. - М.: ЮНИТИ-ДАНА, 2004. - 573 с.).
Описание алгоритмов нечеткого вывода базируется на разделении процесса вывода на ряд последовательных этапов (Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzyTECH. - СПб.: БХВ Петербург, 2005. - 736 с.):
1. Формирование базы правил системы нечеткого вывода.
2. Фаззификация входных переменных.
3. Агрегирование подусловий в нечетких правилах продукций.
4. Активизация или композиция подзаключений в нечетких правилах продукций.
5. Аккумулирование заключений нечетких правил продукций.
6. Дефаззификация.
В качестве примера рассмотрим процесс формирования признака принадлежности МРТС к классу - «свой» с использованием системы нечеткого вывода Мамдани, реализованной в пакете расширения Fuzzy Logic Toolbox пакета прикладных программ MATLAB.
Рассмотрим ситуацию, в которой средствами обнаружения опознающего объекта обнаруживается не один, а группа МРТС, среди которых могут быть как «свои», так и «чужие» объекты.
В качестве входных параметров системы нечеткого вывода выберем две нечеткие лингвистические переменные: Координаты - «разница между координатами обнаруженного объекта и известными координатами своего объекта», с терм множеством {«малое», «среднее», «большое»}, и Количество - «разница между общим количеством объектов и количеством «своих» объектов в группе», с терм множеством {«больше своих, чем чужих», «больше чужих, чем своих»}, а в качестве выходных параметров - нечеткую лингвистическую переменную Принадлежность -«принадлежность объекта к классу «свой», с терм множеством {«свой», «чужой»}.
Функции принадлежности нечетких термов показаны на фиг. 2.
Информация о принадлежности объекта может быть представлена в форме правил нечетких продукций следующего вида:
ПРАВИЛО_1: ЕСЛИ «разница координат малая», ТО «объект принадлежит к классу «свой»
ПРАВИЛО_2: ЕСЛИ «разница координат большая», ТО «объект принадлежит к классу «чужой»
ПРАВИЛО_3: ЕСЛИ «в группе больше своих, чем чужих» И «разница координат средняя», ТО «объект принадлежит к классу «свой»
ПРАВИЛО_4: ЕСЛИ «в группе больше чужих, чем своих» И «разница координат средняя», ТО «объект принадлежит к классу «чужой»
Диаграмма правил нечеткого вывода представлена на фиг. 3. В качестве примера на фиг. 3.: разница координат, полученных от опознающего объекта, и координат, полученных от ближайшего «своего» объекта, - 8 метров; разница между общим количеством обнаруженных объектов и количеством «своих» объектов в группе - 3; результат дефаззификации - признак принадлежности объекта к классу - «свой» равен 0,771.
На фиг. 4 представлена поверхность «входы - выход» нечеткой системы «Свой - чужой», отображающая влияние изменения значений входных нечетких переменных Координаты и Количество на значение выходной нечеткой переменной Принадлежность.
Объединение информации от подсистем радиолокационного и координатно-связного опознавания и принятие решения о принадлежности МРТС к одному из классов - «свой» или «чужой», процессором обработки данных (блоки 21, 22 на фиг. 1) предлагается осуществлять путем многомерной оптимизации целевой функции системы опознавания в пространстве нечетких множеств параметров.
Преимущества данного подхода заключаются в возможности выражения разнородных параметров от различных подсистем опознавания функциями принадлежности нечетких множеств. Это позволяет абстрагироваться от областей существования конкретных параметров и совершать вычислительные операции именно над их функциями принадлежности (Махов Д.С. Метод оптимизации энергетических параметров системы передачи информации в парциальных радиоканалах малоразмерных подвижных объектов на основе аппарата теории нечетких множеств // Системы управления, связи и безопасности. 2019. №4. С. 27-49. DOI: 10.24411/2410- 9916-2019-10402).
б) Осуществление заявляемой системы
Система опознавания МРТС представлена на фиг. 5.
Предлагаемая система опознавания МРТС содержит подсистему радиолокационного опознавания 1 и подсистему координатно-связного опознавания 2, связанные с процессором обработки данных 16 запросчика 14.
Подсистема радиолокационного опознавания 1 включает модуль радиолокационного опознавания 17 запросчика 14 и модуль радиолокационного опознавания 21 ответчика 19, связанные каналом радиосвязи 18.
Подсистема координатно-связного опознавания 2 включает:
ИСОТ 3;
пользовательский терминал 10;
модуль координатно-связного опознавания 15 запросчика 14;
навигационный модуль 20 ответчика 19.
Пользовательский терминал 10, модуль координатно-связного опознавания 15 запросчика 14, навигационный модуль 20 ответчика 19 связаны с ИСОТ 3 защищенными каналами связи соответственно 11, 12 и 13.
ИСОТ 3 предназначена для отождествления координат МРТС, полученных от запросчика, с известными координатами «своего» МРТС, а также осуществления нечеткого вывода о принадлежности опознаваемого МРТС к классу «свой».
В зависимости от используемой модели облачных вычислений возможны различные варианты реализации интеллектуальных подсистем РТС в ИСОТ. Вариант ИСОТ, представленный на фиг. 5, реализует систему, в которой для каждого МРТС выделяется соответствующая виртуальная машина, и включает базы данных 4, 5, 6, группу виртуальных серверов 7, связанную виртуальным каналом связи 9 с группой виртуальных машин 8. Для обеспечения возможности регистрации в системе новых МРТС количество баз данных и виртуальных машин не ограничивается.
Пользовательский терминал 10 предназначен для контроля состояния и управления системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2015 |
|
RU2587474C1 |
| СПОСОБ ОПОЗНАВАНИЯ ОБЪЕКТОВ | 2014 |
|
RU2574601C1 |
| Интегрированная система опознавания | 2016 |
|
RU2608573C1 |
| СПОСОБ ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2008 |
|
RU2386144C1 |
| СПОСОБ КООРДИНАТНО-СВЯЗНОГО ОПОЗНАВАНИЯ С ПРИМЕНЕНИЕМ СТАТИСТИЧЕСКОЙ ОЦЕНКИ РАЗНОСТИ ПРОСТРАНСТВЕННЫХ КООРДИНАТ | 2011 |
|
RU2461019C1 |
| ИНТЕГРИРОВАННОЕ УСТРОЙСТВО ОПОЗНАВАНИЯ | 2014 |
|
RU2561914C1 |
| ИНТЕГРИРОВАННОЕ УСТРОЙСТВО ОПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 2010 |
|
RU2452975C1 |
| Радиолокационная система метрового и низкочастотной части дециметрового диапазонов волн с системой опознавания | 2016 |
|
RU2650198C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК ПЕРЕНОСНОГО КОМПЛЕКСА | 2009 |
|
RU2420758C1 |
| ИНТЕГРИРОВАННОЕ УСТРОЙСТВО ОПОЗНАВАНИЯ | 2015 |
|
RU2597870C1 |
Изобретение относится к способам и системам опознавания различных видов целей типа «свой - чужой», а именно к опознаванию малогабаритных робототехнических средств. Техническим результатом является повышение достоверности опознавания и устойчивости функционирования системы опознавания в условиях деструктивных воздействий. Способ опознавания малогабаритных робототехнических средств заключается в том, что осуществляют радиолокационное опознавание, одновременно с ним осуществляют координатно-связное опознавание с использованием технологий облачных вычислений и алгоритмов вероятностного или нечеткого вывода, принимают нечеткое решение о принадлежности объекта к одному из классов - «свой» или «чужой», путем многомерной оптимизации целевой функции системы опознавания в пространстве нечетких множеств параметров. Система опознавания малогабаритных робототехнических средств содержит связанные с процессором обработки данных подсистему радиолокационного опознавания и подсистему координатно-связного опознавания, включающую информационную систему, функционирующую с использованием технологий облачных вычислений, и по меньшей мере один пользовательский терминал. 2 н. и 2 з.п. ф-лы, 5 ил.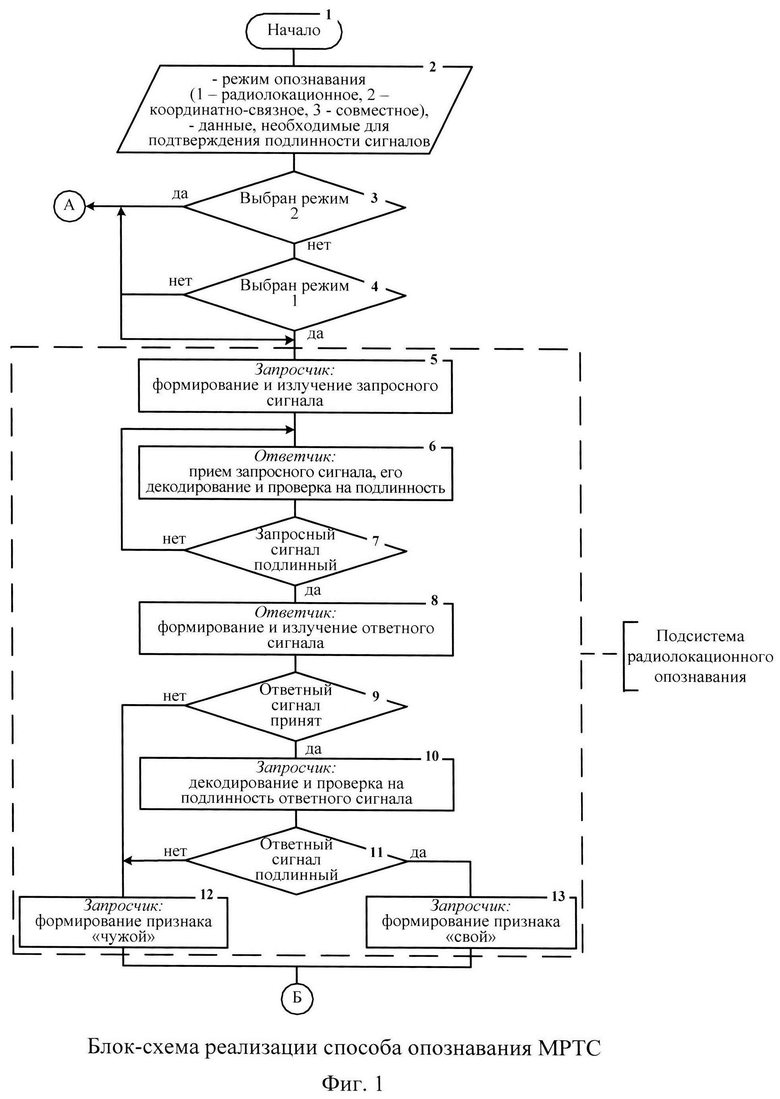
1. Способ опознавания малогабаритных робототехнических средств, заключающийся в том, что для опознавания малогабаритных робототехнических средств используют подсистему радиолокационного опознавания и подсистему координатно-связного опознавания, данные от которых объединяются процессором обработки данных в соответствии с реализованным в нем алгоритмом, с последующей выдачей решения о принадлежности малогабаритного робототехнического средства к одному из классов - «свой» или «чужой», при радиолокационном опознавании запросчик идентифицирующего объекта, обнаружив малогабаритное робототехническое средство, формирует и излучает кодированный запросный сигнал, который ответчик опознаваемого объекта принимает, декодирует и проверяет на подлинность, при подтверждении подлинности которого ответчик формирует и излучает кодированный ответный сигнал, который запросчик принимает, декодирует и проверяет на подлинность, при подтверждении подлинности которого формируется признак принадлежности объекта к классу «свой», в противном случае - признак «чужой», который подается в процессор обработки данных, при координатно-связном опознавании идентифицирующий объект посредством имеющихся у него средств определяет пространственные координаты обнаруженного малогабаритного робототехнического средства, отличающийся тем, что на основе анализа условий функционирования подсистем оператор определяет режим радиолокационного, координатно-связного или совместного использования радиолокационного и координатно-связного опознавания, вместо передачи запросного сигнала в режиме координатно-связного опознавания, либо одновременно с его передачей в режиме совместного использования радиолокационного и координатно-связного опознавания, запросчик формирует и передает по защищенному каналу в доверенную информационную систему, функционирующую с использованием технологий облачных вычислений, запрос на опознавание, содержащий координаты обнаруженного малогабаритного робототехнического средства, которое передает свои навигационные параметры в доверенную информационную систему, функционирующую с использованием технологий облачных вычислений, при получении запроса на опознавание информационная система, функционирующая с использованием технологий облачных вычислений, осуществляет отождествление координат опознаваемого малогабаритного робототехнического средства, полученных от запросчика, с координатами, поступившими от малогабаритного робототехнического средства, при совпадении с заданной точностью координат опознаваемого малогабаритного робототехнического средства с координатами «своего» объекта формируется признак принадлежности к классу «свой», в противном случае - признак «чужой», запросчику передается соответствующий ответ, который подается в процессор обработки данных.
2. Способ по п. 1, отличающийся тем, что признак принадлежности объекта к классу «свой» в информационной системе, функционирующей с использованием технологий облачных вычислений, формируют с использованием алгоритмов вероятностного или нечеткого вывода.
3. Способ по п. 1, отличающийся тем, что объединяют данные, полученные от подсистем радиолокационного и координатно-связного опознавания, принимают решение о принадлежности малогабаритного робототехнического средства к одному из классов - «свой» или «чужой», путем осуществления многомерной оптимизации целевой функции системы опознавания в пространстве нечетких множеств параметров.
4. Система опознавания малогабаритных робототехнических средств, содержащая связанные с процессором обработки данных запросчика подсистему радиолокационного опознавания, включающую связанные каналом радиосвязи модуль радиолокационного опознавания запросчика, размещенного на идентифицирующем объекте, и модуль радиолокационного опознавания ответчика, размещенного на опознаваемом малогабаритном робототехническом средстве, и подсистему координатно-связного опознавания, включающую модуль координатно-связного опознавания запросчика и навигационный модуль по меньшей мере одного опознаваемого малогабаритного робототехнического средства, причем каждая из подсистем выделяет и оценивает соответствующие признаки принадлежности объекта к одному из классов - «свой» или «чужой», отличающаяся тем, что в подсистему координатно-связного опознавания дополнительно введены информационная система, функционирующая с использованием технологий облачных вычислений, и по меньшей мере один пользовательский терминал, причем запросчик идентифицирующего объекта связан по защищенному каналу связи с доверенной информационной системой, функционирующей с использованием облачных вычислений, навигационный модуль по меньшей мере одного опознаваемого малогабаритного робототехнического средства также связан по защищенному каналу с доверенной информационной системой, функционирующей с использованием технологий облачных вычислений, с которой связан по защищенному каналу по меньшей мере один пользовательский терминал, информационная система, функционирующая с использованием технологий облачных вычислений, обеспечивает вероятностное или нечеткое отождествление координат малогабаритного робототехнического средства, полученных от запросчика, с известными координатами «своего» малогабаритного робототехнического средства, процессор обработки данных осуществляет принятие нечеткого решения о принадлежности малогабаритного робототехнического средства к одному из классов - «свой» или «чужой», пользовательский терминал предназначен для контроля состояния и управления системой.
| Способ построения системы опознавания "свой-чужой" на основе протокола с нулевым разглашением, реализованный в модулярном коде | 2018 |
|
RU2713511C1 |
| СПОСОБ ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2008 |
|
RU2386144C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| WO 2019239308 A1, 19.12.2019 | |||
| СПОСОБ ПОЛУЧЕНИЯ ГЛИЦИДОЛА | 0 |
|
SU368746A1 |
| WO 2020194249 A1, 01.10.2020. | |||

