Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации объектов, обнаруживаемых РЛС.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации воздушных объектов (см., например, патент на изобретение №2568677 от 20 ноября 2015 г.), основанный на обнаружении с помощью РЛС I объектов и формировании оценок их пространственных координат  , формировании текущих навигационно-связных оценок (ТНСО) идентификационных признаков (ИП) обнаруженных объектов
, формировании текущих навигационно-связных оценок (ТНСО) идентификационных признаков (ИП) обнаруженных объектов  (под ТНСО ИП обнаруженных объектов q* понимаются оценки ИП обнаруженных объектов, сформированные путем попарного отождествления оценок их координат
(под ТНСО ИП обнаруженных объектов q* понимаются оценки ИП обнаруженных объектов, сформированные путем попарного отождествления оценок их координат  с оценками координат абонентов системы обмена данными (СОД)
с оценками координат абонентов системы обмена данными (СОД)  в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.)), где
в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.)), где  , q∈[0,1] - ИП объекта, q=0 - объект не является абонентом СОД, q=1 - объект является абонентом СОД, определении значений функции правдоподобия (ФП) ИП к их ТНСО
, q∈[0,1] - ИП объекта, q=0 - объект не является абонентом СОД, q=1 - объект является абонентом СОД, определении значений функции правдоподобия (ФП) ИП к их ТНСО  , где
, где  - вектор ИП,
- вектор ИП,  , J - число возможных состояний (комбинаций) вектора ИП q, формировании вектора уточненных оценок ИП обнаруженных объектов
, J - число возможных состояний (комбинаций) вектора ИП q, формировании вектора уточненных оценок ИП обнаруженных объектов  по критерию максимума ФП .
по критерию максимума ФП .
К основным недостаткам прототипа относится снижение вероятности правильной идентификации обнаруженных объектов при условии наличия нескольких максимумов ФП . В этой ситуации отсутствует возможность однозначного формирования решения о векторе уточненных оценок ИП q** по критерию максимума ФП . Причиной достаточно высокой вероятности наличия нескольких максимумов ФП в прототипе является то, что данная функция имеет дискретную, существенно ограниченную, область значений:  . То есть ФП может принимать только одно из двух значений «0» или «1» и соответственно вероятность принятия максимального значения «1» для нескольких qj достаточно высока.
. То есть ФП может принимать только одно из двух значений «0» или «1» и соответственно вероятность принятия максимального значения «1» для нескольких qj достаточно высока.
Техническим результатом изобретения является повышение вероятности правильной идентификации обнаруженных объектов в условиях наличия нескольких максимумов ФП .
Указанный результат достигается тем, что в прототипе, в течение цикла обзора пространства РЛС дополнительно формируют с помощью РСАО, устанавливаемой на абонентах СОД, прямые оценки (ПО) ИП обнаруженных объектов  (под ПО ИП обнаруженных объектов понимаются оценки ИП обнаруженных объектов, сформированные РСАО в соответствии с известным способом идентификации воздушных целей (см., например, патент на изобретение №2567243 от 10 ноября 2015 г.)), по окончании цикла обзора пространства РЛС, после этапа определения значений ФП , определяют число ее максимумов М и совокупность соответствующих им векторов ИП
(под ПО ИП обнаруженных объектов понимаются оценки ИП обнаруженных объектов, сформированные РСАО в соответствии с известным способом идентификации воздушных целей (см., например, патент на изобретение №2567243 от 10 ноября 2015 г.)), по окончании цикла обзора пространства РЛС, после этапа определения значений ФП , определяют число ее максимумов М и совокупность соответствующих им векторов ИП  , где
, где  , если М=1, то формируют решение о векторе итоговых оценок (ИО) ИП обнаруженных объектов q*** по критерию максимума ФП в соответствии с прототипом, иначе оценивают для каждого i объем неопределенности РСАО δVQi, оценивают для каждых i и m пространственную плотность ρim абонентов СОД, оборудованных РСАО, определяют для каждых i и m вероятности формирования РСАО правильных ПО ИП обнаруженных объектов, определяют для каждого m значения ФП ИП к их ПО
, если М=1, то формируют решение о векторе итоговых оценок (ИО) ИП обнаруженных объектов q*** по критерию максимума ФП в соответствии с прототипом, иначе оценивают для каждого i объем неопределенности РСАО δVQi, оценивают для каждых i и m пространственную плотность ρim абонентов СОД, оборудованных РСАО, определяют для каждых i и m вероятности формирования РСАО правильных ПО ИП обнаруженных объектов, определяют для каждого m значения ФП ИП к их ПО  , формируют решение о векторе ИО ИП q*** по критерию максимума ФП
, формируют решение о векторе ИО ИП q*** по критерию максимума ФП  .
.
Сущность изобретения заключается в том, что в условиях наличия нескольких максимумов функции правдоподобия идентификационных признаков к их текущим навигационно-связным оценкам, из совокупности векторов, соответствующих данным максимумам, с учетом пространственной плотности абонентов СОД, оборудованных РСАО, выделяется вектор, соответствующий максимуму функции правдоподобия идентификационных признаков к их прямым оценкам, сформированным РСАО, и принимается в качестве вектора итоговых оценок идентификационных признаков обнаруженных объектов. Таким образом, вероятность формирования неоднозначного решения о векторе итоговых оценок идентификационных признаков практически исключается, так как область значений функции правдоподобия идентификационных признаков к их прямым оценкам является непрерывной в пределах от 0 до 1, и за счет этого повышается вероятность правильной идентификации обнаруженных объектов.
Данный способ включает в себя следующие этапы:
1. В течение цикла обзора пространства РЛС:
1.1. Обнаружение с помощью РЛС I объектов, оценка их пространственных координат  , где
, где  - оценка дальности до i-го объекта,
- оценка дальности до i-го объекта,  ,
,  - оценки горизонтального и вертикального пеленгов i-го объекта, формирование ТНСО ИП обнаруженных объектов
- оценки горизонтального и вертикального пеленгов i-го объекта, формирование ТНСО ИП обнаруженных объектов  путем попарного отождествления оценок их координат
путем попарного отождествления оценок их координат  с оценками координат абонентов СОД
с оценками координат абонентов СОД  в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.)
в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.)
1.2. Формирование с помощью РСАО, устанавливаемой на абонентах СОД, ПО ИП обнаруженных объектов  в соответствии с известным способом идентификации воздушных целей (см., например, патент на изобретение №2567243 от 06 октября 2015 г.);
в соответствии с известным способом идентификации воздушных целей (см., например, патент на изобретение №2567243 от 06 октября 2015 г.);
2. По окончании цикла обзора пространства РЛС:
2.1. Определение для каждого j значений ФП ИП к их ТНСО в соответствии с прототипом;
2.2. Определение числа максимумов ФП M и совокупности соответствующих им векторов ИП в соответствии с выражениями:


где  .
.
2.3. Если М=1, то
2.3.1. Формирование решения о векторе ИО ИП обнаруженных объектов q*** по критерию максимума ФП согласно выражению

иначе
2.3.2. Оценка для каждого i объема неопределенности РСАО δVQi в соответствии с выражением

где δDQ и δϕQ - разрешающие способности РСАО по дальности и угловым координатам соответственно;
2.3.3. Оценка для каждых i и m пространственной плотности ρim абонентов СОД, оборудованных РСАО, в соответствии с выражением

где N1im - число ИП q=1, содержащихся в m-м векторе qm, ограниченных объемом δVQi:
 ,
,
где
здесь  ;
;
2.3.4. Определение для каждых i и m вероятностей формирования РСАО правильных ПО ИП обнаруженных объектов в соответствии с выражениями:


где Р0 - вероятность формирования РСАО правильной ПО ИП q=0, Р1 - вероятность формирования РСАО правильной ПО ИП q=1;
2.3.5. Определение для каждого m значений ФП ИП к их ПО  в соответствии с выражением
в соответствии с выражением

где
2.3.6. Формирование решения о векторе ИО ИП обнаруженных объектов q*** по критерию максимума ФП  в соответствии с выражением
в соответствии с выражением

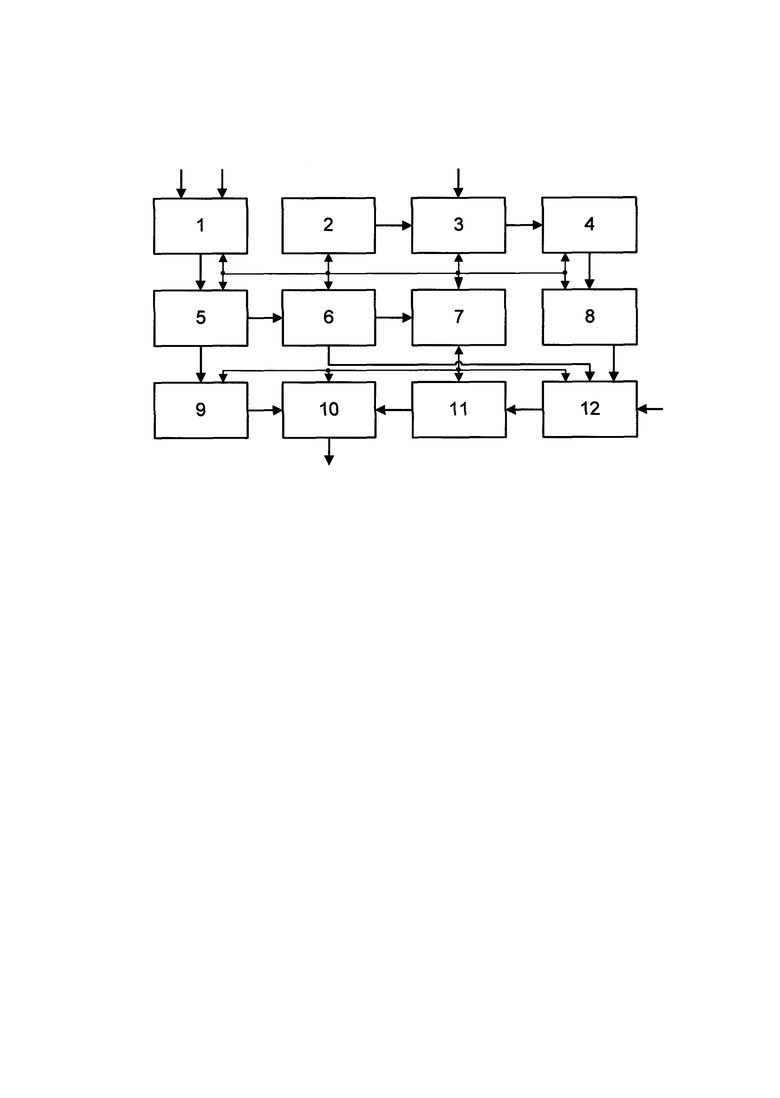
Данный способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре 1, где обозначено: 1 - блок формирования ТНСО (БФТНСО); 2 - постоянное запоминающее устройство (ПЗУ); 3 - блок оценки объема неопределенности (БООН); 4 -блок оценки пространственной плотности (БООП); 5 - блок оценки значений функции правдоподобия (БОЗФП); 6 - блок оценки числа максимумов и соответствующих векторов (БОЧМСВ); 7 - блок управления (БУ); 8 - блок оценки вероятностей (БОВ); 9 - блок формирования вектора итоговых оценок (БФВИО); 10 - согласующий блок (СБ); 11 - БФВИО; 12 - БОЗФП.
БФТО 1 предназначен для формирования ТНСО ИП обнаруженных объектов q* в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.). ПЗУ 2 предназначено для хранения значений разрешающих способностей РСАО по дальности δDQ и угловым координатам δϕQ. БООН 3 предназначен для оценки значений объема неопределенности РСАО δVQi в соответствии с выражением (4). БОПП 4 предназначен оценки значений пространственной плотности ρim абонентов СОД, оборудованных ответчиками РСАО, в соответствии с выражением (5). БОЗФП 5 предназначен для определения значений ФП в соответствии с прототипом. БОЧМСВ 6 предназначен для определения числа максимумов ФП М и соответствующих им векторов ИП qm согласно выражениям (1) и (2). БУ 7 предназначен для управления работой элементов устройства. БОВ 8 предназначен для определения вероятностей формирования РСАО правильных ПО ИП обнаруженных объектов P0im и P1im в соответствии с выражениями (6) и (7). БФВИО 9 предназначен для формирования решения о векторе ИО ИП обнаруженных объектов q*** по критерию максимума ФП в соответствии с прототипом, согласно выражению (3). СБ 10 предназначен для своевременной выдачи вектора ИО ИП обнаруженных объектов q*** потребителю. БФВИО 11 предназначен для формирование решения о векторе ИО ИП обнаруженных объектов q*** по критерию максимума ФП  в соответствии с выражением (10). БОЗФП 12 предназначен для определения значений ФП ИП
в соответствии с выражением (10). БОЗФП 12 предназначен для определения значений ФП ИП  в соответствии с выражением (8).
в соответствии с выражением (8).
Устройство работает следующим образом. БУ 7 управляет работой элементов устройства. Работа устройства разбивается на два этапа: 1) в течение цикла обзора пространства РЛС и 2) по окончании цикла обзора пространства РЛС.
1. В течение цикла обзора пространства РЛС осуществляются следующие операции. От РЛС на вход БФТО 1 поступают оценки пространственных координат обнаруженных объектов  , а на вход БООН 3 - оценки дальностей до обнаруженных объектов
, а на вход БООН 3 - оценки дальностей до обнаруженных объектов  . От СОД на вход БФТО 1 поступают оценки пространственных координат абонентов СОД
. От СОД на вход БФТО 1 поступают оценки пространственных координат абонентов СОД  . От РСАО на вход БОЗФП 12 поступают ПО ИП обнаруженных объектов
. От РСАО на вход БОЗФП 12 поступают ПО ИП обнаруженных объектов  , сформированные РСАО в соответствии с известным способом (см., например, патент на изобретение №2567243 от 06 октября 2015 г.). БФТО 1 формирует ТНСО ИП обнаруженных объектов q* в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.). С выхода БФТО 1 ТНСО ИП q* поступают на вход БОЗФП 5.
, сформированные РСАО в соответствии с известным способом (см., например, патент на изобретение №2567243 от 06 октября 2015 г.). БФТО 1 формирует ТНСО ИП обнаруженных объектов q* в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.). С выхода БФТО 1 ТНСО ИП q* поступают на вход БОЗФП 5.
2. По окончании цикла обзора пространства РЛС осуществляются следующие операции. БОЗФП 5 определяет для каждого j значения ФП соответствии с прототипом. С выхода БОЗФП 5 значения ФП поступают на вход БОЧМСВ 6 и вход БФВИО 9. БОЧМСВ 6 определяет число максимумов ФП М и совокупность соответствующих им векторов в соответствии с выражениями (1) и (2). С выхода БОЧ-МСВ 6 значение М поступает на БУ 7, а совокупность векторов на БОЗФП 12. Если М=1, то БУ 7 формирует управляющий сигнал S1, иначе БУ 7 формирует управляющий сигнал S2. С выхода БУ 7 сигнал S1 поступает на БФВИО 9, а сигнал S2 на БООН 3.
Под воздействием сигнала S1 БФВИО 9 формирует решение о векторе ИО ИП q*** по критерию максимума ФП в соответствии с прототипом, согласно выражению (3). С выхода БФВИО 9 вектор ИО ИП q*** поступает на СБ 10.
Под воздействием сигнала S2 БООН 3 оценивает для каждого i значения объема неопределенности РСАО δVQi в соответствии с выражением (4). С выхода БООН 3 совокупность значений объема неопределенности РСАО  поступает на вход БОНН 4. БОПП 4 оценивает для каждых i и m значения пространственной плотности ρim абонентов СОД, оборудованных ответчиками РСАО, в соответствии с выражением (5). С выхода БООП 4 совокупность значений пространственных плотностей
поступает на вход БОНН 4. БОПП 4 оценивает для каждых i и m значения пространственной плотности ρim абонентов СОД, оборудованных ответчиками РСАО, в соответствии с выражением (5). С выхода БООП 4 совокупность значений пространственных плотностей  поступает на БОВ 8. БОВ 8 определяет для каждых i и m вероятности формирования РСАО правильных ПО ИП P0im и P1im в соответствии с выражениями (6) и (7). С выхода БОВ 8 совокупность значений
поступает на БОВ 8. БОВ 8 определяет для каждых i и m вероятности формирования РСАО правильных ПО ИП P0im и P1im в соответствии с выражениями (6) и (7). С выхода БОВ 8 совокупность значений  и
и  поступает на вход БОЗФП 12. БОЗФП 12 определяет для каждого m значения ФП
поступает на вход БОЗФП 12. БОЗФП 12 определяет для каждого m значения ФП  в соответствии с выражением (8). С выхода БОЗФП 12 значения ФП
в соответствии с выражением (8). С выхода БОЗФП 12 значения ФП  поступают на БФВИО 11. БФВИО 11 формирует решение о векторе ИО ИП q*** по критерию максимума ФП
поступают на БФВИО 11. БФВИО 11 формирует решение о векторе ИО ИП q*** по критерию максимума ФП  в соответствии с выражением (10). С выхода БФВИО 11 вектор ИО ИП q*** поступает на СБ 10.
в соответствии с выражением (10). С выхода БФВИО 11 вектор ИО ИП q*** поступает на СБ 10.
СБ 10 выдает вектор ИО ИП q*** потребителю.
Для определения эффективности предлагаемого способа оценивались следующие показатели:
- вероятность правильной идентификации обнаруживаемых РЛС объектов в комплексной системе идентификации, функционирующей в соответствии с предлагаемым способом P1;
- вероятность правильной идентификации обнаруженных объектов в подсистеме навигационно-связной идентификации, функционирующей в соответствии с известным способом идентификации воздушных объектов Р0 (см., например, патент на изобретение №2568677 от 20 ноября 2015 г.).
Показатели Р1, Р0 оценивались путем проведения статистических испытаний на соответствующих имитационных моделях подсистем комплексной и навигационно-связной идентификации при одинаковых начальных условиях.
Для характеристики эффективности предлагаемого способа определялся прирост вероятности правильной идентификации объектов в подсистеме комплексной идентификации ΔР за счет применения предлагаемого способа по отношению к аналогичному показателю прототипа:  . В зависимости от условий проводимых испытаний прирост вероятности правильной идентификации ΔР составил до 15%.
. В зависимости от условий проводимых испытаний прирост вероятности правильной идентификации ΔР составил до 15%.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ комплексной идентификации объектов, обнаруживаемых РЛС, сущность которого заключается в том, что в условиях наличия нескольких максимумов ФП ИП к их ТНСО, решение о векторе ИО ИП обнаруженных объектов формируется по критерию максимума ФП ИП к их ПО, с учетом пространственной плотности абонентов СОД, оборудованных РСАО. При этом область выбора вектора ИО ИП обнаруженных объектов ограничивается векторами, соответствующими максимумам ФП ИП к их ТНСО.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что процедура формирования решения о векторе ИО ИП обнаруженных объектов по критерию максимума ФП ИП к их ПО, с учетом пространственной плотности абонентов СОД, оборудованных РСАО, приводит к повышению вероятности правильной идентификации обнаруженных объектов в условиях наличия нескольких максимумов ФП ИП к их ТНСО.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2792021C1 |
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2740385C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791599C1 |
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2020 |
|
RU2744335C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации объектов, обнаруживаемых РЛС. Технический результат - повышение вероятности правильной идентификации обнаруженных объектов в условиях наличия нескольких максимумов функции правдоподобия идентификационных признаков к их текущим навигационно-связным оценкам. Сущность изобретения заключается в том, что в условиях наличия нескольких максимумов функции правдоподобия идентификационных признаков к их текущим навигационно-связным оценкам из совокупности векторов, соответствующих данным максимумам, с учетом пространственной плотности абонентов системы обмена данными, оборудованных радиолокационной системой с активным ответом, выделяется вектор, соответствующий максимуму функции правдоподобия идентификационных признаков к их прямым оценкам, сформированным радиолокационной системой с активным ответом, и принимается в качестве вектора итоговых оценок идентификационных признаков обнаруженных объектов. 1 ил.
Способ комплексной идентификации объектов, обнаруживаемых РЛС, основанный на обнаружении с помощью РЛС I объектов и формировании оценок их пространственных координат, формировании текущих навигационно-связных оценок идентификационных признаков обнаруженных объектов путем попарного отождествления оценок их координат с координатами абонентов системы обмена данными (СОД), определении значений функции правдоподобия идентификационных признаков к их текущим навигационно-связным оценкам, отличающийся тем, что в течение цикла обзора пространства РЛС дополнительно формируют с помощью радиолокационной системы с активным ответом (РСАО), устанавливаемой на абонентах СОД, прямые оценки идентификационных признаков обнаруженных объектов, по окончании цикла обзора пространства РЛС, после этапа определения значений функции правдоподобия идентификационных признаков обнаруженных объектов к их текущим навигационно-связным оценкам, определяют число ее максимумов М и совокупность соответствующих им векторов идентификационных признаков, если М=1, то формируют решение о векторе итоговых оценок идентификационных признаков обнаруженных объектов по критерию максимума функции правдоподобия идентификационных признаков обнаруженных объектов к их текущим навигационно-связным оценкам, иначе оценивают для каждого  объем неопределенности РСАО, оценивают для каждых i и
объем неопределенности РСАО, оценивают для каждых i и  пространственную плотность абонентов СОД, оборудованных РСАО, определяют для каждых i и m вероятности формирования РСАО правильных прямых оценок идентификационных признаков обнаруженных объектов, определяют для каждого m значения функции правдоподобия идентификационных признаков к их прямым оценкам, формируют решение о векторе итоговых оценок идентификационных признаков обнаруженных объектов по критерию максимума данной функции правдоподобия.
пространственную плотность абонентов СОД, оборудованных РСАО, определяют для каждых i и m вероятности формирования РСАО правильных прямых оценок идентификационных признаков обнаруженных объектов, определяют для каждого m значения функции правдоподобия идентификационных признаков к их прямым оценкам, формируют решение о векторе итоговых оценок идентификационных признаков обнаруженных объектов по критерию максимума данной функции правдоподобия.
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА | 1997 |
|
RU2126980C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ДЕЙСТВИЯ И УВЕЛИЧЕНИЯ ТОЧНОСТИ ИЗМЕРЕНИЯ РАССТОЯНИЯ СИСТЕМЫ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2594345C1 |
| US 7692573 B1, 06.04.2010 | |||
| Раздвижная форма | 1978 |
|
SU747723A1 |
| JP 4772341 B2, 14.09.2011. | |||

