Настоящее изобретение относится к способу определения геометрии дефекта материала, а также к способу определения предела нагрузочной способности объекта, нагружаемого, по меньшей мере в эксплуатации, давлением.
Одной из важных задач при инспекции магистральных трубопроводов, решаемой, в частности, при помощи так называемых интеллектуальных внутритрубных инспекционных приборов (снарядов), является прогнозирование безопасных условий эксплуатации, определяемых состоянием трубопровода. Оператора магистрального трубопровода интересует, в частности, состояние возможно имеющихся сварных швов, а также количество и размер дефектов материала. Такими дефектами являются, например, участки с потерями металла вследствие коррозии, трещины или иные ослабления стенки объекта, предназначенного, в частности, для хранения или транспортировки жидких либо газообразных сред. К таким объектам относятся, например, трубы, трубопроводы или резервуары.
Знание действующего для трубопровода максимального давления ("максимальное разрывное давление"), после которого происходит разрушение трубопровода, имеет значение для создаваемых в трубопроводе рабочих давлений. Соответственно, важно точно прогнозировать, т.е. теоретически определять, это давление. В настоящее время для вычисления этого предельного значения дефект приближенно считают имеющим лишь длину, ширину и глубину и таким образом рассматривают как кубоид. Однако именно в случае коррозионных потерь металла с наружной или внутренней стороны трубопровода такой традиционный консервативный подход неблагоприятен, поскольку упрощенные геометрические фигуры обязательно переоценивают фактическую структуру дефекта. Это приводит к недооценке максимальных разрывающих давлений объекта, а значит, и к занижению разрешенных рабочих давлений. Эксплуатация же такого объекта, как магистральный трубопровод или газовый резервуар, при более высоком давлении может быть значительно более экономичной.
Как известно из уровня техники, для измерения коррозии объекта специально обученный персонал оценивает сканы данных магнитного потока рассеяния (МПР-данных, англ. MFL - сокр. от Magnetic Flux Leakage), полученные путем выполнения измерений методом магнитных потоков рассеяния, также известным как метод магнитных полей рассеяния (МПР-измерения), для определения размера (коррозионных) дефектов. Отображаемые на этих сканах сигналы параметризируют по кубоидам и оценивают. С одной стороны, допущения, требуемые для этой оценки результатов измерения, также называемой классификацией по размерам (sizing), индивидуальны для соответствующей организации. С другой стороны, на интерпретацию результатов измерения сильно влияют показатели опыта специалистов, проводящих оценку. В конечном итоге качество прогнозов можно обеспечить лишь на основании исследований трубопровода, проведенных на месте. Это, в свою очередь, влечет для операторов высокие издержки. Наиболее распространенный промышленный стандарт API 1163 описывает неблагоприятные эффекты этого упрощенного подхода. Четко задокументировано, что качество этого подхода сильно зависит от знаний проводящего наблюдения персонала. Применяемые на практике подходы всегда предполагают подверженность интерпретации данных, полученных в результате цикла МПР-измерений, влиянию субъективных факторов.
Кроме того, из научных, т.е. теоретических, исследований, известны подходы, при осуществлении которых при помощи последовательного изменения и итерационных методов приближения предполагаемой геометрии дефекта достигается максимально точная имитация (имитационное моделирование) измеренных сигналов посредством моделей решения прямых задач. При этом используются, например, нейронные сети. Теоретически эти подходы способны дать определенные решения в смысле получения геометрии дефекта, однако такие решения не обязательно реалистичны. Это справедливо, в частности, для сложных наборов данных, которые в условиях определенных обратных задач приводят к неожиданным, экзотическим и неверным решениям. Если в точно заданных и отграниченных экспериментальных сценариях такие научные модели и дают решение описанных проблем в виде геометрий дефектов, то для реальных измерительных данных, содержащих множество мешающих факторов, они до сих пор не принесли успеха.
Поэтому задача настоящего изобретения заключается в том, чтобы предложить надежный метод точной реконструкции реального дефекта по его набору измерительных данных, полученных методом магнитных потоков рассеяния (МПР), и обеспечить как можно более точное вычисление предела нагрузочной способности объекта с коррозионным поражением.
Поставленная задача решается в способе по пункту 1 формулы изобретения, а в отношении определения предела нагрузочной способности - в способе по пункту 15 формулы изобретения. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения, ссылающихся на вышеуказанные независимые пункты, а также в нижеследующем описании.
В соответствии с изобретением определение геометрии одного или нескольких дефектов осуществляют посредством множества экспертных подпрограмм, которые выполняются в устройстве электронной обработки данных (ЭОД) в конкуренции, в частности параллельно, друг с другом и каждая из которых имеет по меньшей мере одну собственную (специализированную) поисковую стратегию или по меньшей мере один собственный (специализированный) алгоритм.
Такой предлагаемый в изобретении способ определения геометрии одного или нескольких реальных исследованных дефектов намагничиваемого объекта, в частности трубы или резервуара, при помощи эталонного набора данных объекта, созданного на основании одного или нескольких измерений методом магнитных потоков рассеяния (МПР-измерений), предпочтительно включает по меньшей мере частичное представление объекта посредством устройства ЭОД, в частности на по меньшей мере трехмерной сетке объекта или посредством нее, а также включает определение, в частности создание, начальной геометрии дефекта в качестве его исходной геометрии, в частности на сетке объекта или на по меньшей мере двумерной сетке дефектов,
определение, в частности создание, первого МПР-прогнозного набора данных в качестве исходного прогнозного набора данных на основании исходной геометрии дефекта, в частности путем имитации МПР-измерения или предоставления МПР-набора данных,
и итерационное согласование исходной геометрии дефекта с геометрией реального дефекта или дефектов посредством устройства ЭОД, причем это согласование осуществляют посредством нескольких экспертных подпрограмм, выполняемых в конкуренции и предпочтительно параллельно друг с другом, причем в соответствующих экспертных подпрограммах посредством по меньшей мере одного собственного алгоритма или собственной поисковой стратегии и на основании исходной геометрии дефекта создается соответствующая экспертная геометрия дефекта.
Экспертная подпрограмма имеет собственный алгоритм в том случае, если по меньшей мере один из алгоритмов, имеющихся в распоряжении этой экспертной подпрограммы для согласования геометрии дефекта, по меньшей мере частично отличается от алгоритмов другой экспертной подпрограммы. Для дифференциации алгоритмов различных экспертных подпрограмм предпочтительно могут использоваться стохастические процессы. Каждая экспертная подпрограмма имеет по меньшей мере один алгоритм для согласования геометрии дефекта, причем в распоряжении по меньшей мере одной экспертной подпрограммы предпочтительно имеется несколько алгоритмов. Выбор того или иного алгоритма в пределах одной экспертной подпрограммы также может осуществляться или задаваться на основании стохастических процессов.
В соответствии с изобретением также предусматривается, что на основании соответствующей экспертной геометрии дефекта определяют, в частности путем имитации МПР-измерения или предоставления МПР-набора данных, соответствующий экспертный прогнозный набор данных, причем экспертную геометрию дефекта, лежащую в основе соответствующего экспертного прогнозного набора данных, предоставляют по меньшей мере одной из экспертных подпрограмм, предпочтительно нескольким, в частности всем экспертным подпрограммам, в качестве новой исходной геометрии дефекта для дальнейшего согласования с геометрией реального дефекта или реальных дефектов в том случае, если этот экспертный прогнозный набор данных более подобен эталонному набору данных, чем исходный прогнозный набор данных. После этого, т.е. для следующих сравнений соответствующих экспертных геометрий дефекта с новой исходной геометрией дефекта, экспертный прогнозный набор данных, относящийся к новой исходной геометрии дефекта, используют в качестве нового исходного прогнозного набора данных. Меру вышеупомянутого подобия может представлять функция приспособленности (фитнесс-функция). Итерационное согласование посредством экспертных подпрограмм происходит до тех пор, пока не будет выполнен критерий останова. Экспертный прогнозный набор данных и первый МПР-прогнозный набор данных показывают обе МПР-многопараметровые характеристики, относящиеся к соответствующей принятой геометрии дефекта. Они могут вычисляться или имитироваться.
Определение экспертного прогнозного набора данных может осуществляться в рамках рабочего процесса экспертной подпрограммы и/или посредством программного модуля, отдельно управляемого контролирующей подпрограммой.
Определение экспертного прогнозного набора данных на основании соответствующей экспертной геометрии дефекта осуществляется, в частности, когда в распоряжении еще нет достаточно больших баз данных с вычисленными или измеренными МПР-данными, относящимися к соответствующим геометриям дефектов, путем имитации МПР-измерения, которая описывается ниже. В качестве альтернативы этому подходу, для экспертной геометрии дефекта также может привлекаться МПР-набор данных из достаточно объемной базы данных. Возможен и комбинированный подход, при котором сначала ищут в базе данных уже имеющиеся МПР-данные и только затем, при отрицательном исходе поиска, выполняют имитацию. В целом это может обеспечивать быстрое определение соответствующего экспертного прогнозного набора данных.
Предлагаемый в изобретении способ выполняется полностью, в частности в автоматизированном режиме, в устройстве ЭОД, которое при необходимости может состоять из нескольких компьютеров. Соответствующая вычислительная программа может представлять собой одну программу, или же речь может идти о программном пакете, содержащем множество программных модулей, выполняемых распределенно, например, в зависимости от ресурсов, в различных системах или субблоках электронной обработки данных, где они могут храниться в соответствующих носителях данных. Компьютер содержит, в частности, типичные технические средства устройства обработки данных, такие как один или несколько процессоров, по меньшей мере оперативную память (RAM), средства передачи данных, устройства индикации и/или ввода. Если выбор эталонного набора данных может осуществляться в предпочтительном случае под управлением пользователя, то определение геометрии дефекта в процессе итераций происходит автоматически. Перед собственно итерацией еще предпочтительно могут устанавливаться параметры программы для выбора алгоритмов, доступных экспертным подпрограммам, определения начальной геометрии дефекта, определения первого прогнозного набора данных и/или экспертного прогнозного набора данных, показывающих соответствующие МПР-многопараметровые характеристики (МПР-поля). Например, таким образом можно устанавливать, должен ли исходный прогнозный набор данных определяться посредством имитации МПР-измерения на основании сетки, представляющей объект с дефектом, или загружаться посредством регрессии из базы данных. В частности, в случае имитации МПР-многопараметровой характеристики могут устанавливаться, или назначаться, параметры, необходимые для сравнения с эталонным набором данных, такие, например, как направление намагничивания, интенсивность намагничивания, расстояние от датчика до поверхности объекта и/или скорость перемещения измерительного устройства.
Благодаря экспертным подпрограммам, которые конкурируют друг с другом за ресурсы устройства ЭОД и при помощи собственных поисковых стратегий ищут собственные решения для определения геометрии реального дефекта, удается, в частности, обойти проблему, свойственную теоретическим подходам из уровня техники и заключающуюся в нахождении изолированных решений. По сравнению с ручной оценкой наборов данных найденное решение не только является значительно лучшим, но и легче поддается пониманию и документированию. Таким образом удается избежать сингулярных решений, при которых алгоритм, не важно какого типа, застревает (не может продвигаться дальше), а геометрия дефекта не воспроизводится реалистично.
Для имитации данных потока рассеяния, относящихся к определенной геометрии, как правило, потребуется представление объекта на трехмерной сетке или посредством нее. Представление на такой сетке является по меньшей мере частичным в том смысле, что посредством сетки объекта или на сетке объекта представляется по меньшей мере та часть объекта, что имеет дефект или дефекты, а предпочтительно - и примыкающие к ней области. В качестве альтернативы, определение данных потока рассеяния также может осуществляться посредством опроса базы данных, например, посредством функции регрессии.
Хотя предлагаемый в изобретении способ может осуществляться в рамках эталонного набора данных одновременно для определения одного или нескольких дефектов, ниже для простоты рассматривается преимущественно определение только одного дефекта.
Геометрия дефекта для МПР-имитации при умелом выборе представления объекта, в частности представления посредством по меньшей мере трехмерной сетки объекта или на такой сетке, может назначаться в виде значения элементам или точкам сетки. В зависимости от геометрии соответствующих сеток для этого могут быть необходимы интерполяции или адаптации сеток.
В частности, геометрии дефектов, представляющие собой основу для определения соответствующих (МПР- или экспертных) прогнозных наборов данных, естественным образом определяются в узлах двумерной сетки дефектов глубинами дефектов, представляющих, например, глубину коррозии на поверхности объекта. При таком двумерном представлении дефектов экспертные подпрограммы могут работать заметно быстрее, чем в случае, если согласование геометрии дефекта проводится на трехмерной сетке.
Для имитации МПР-измерения новой геометрии дефекта сетка дефектов, в частности двумерная, предпочтительно интерполируется на точки сетки объекта, причем поверхность представляемого объекта согласовывается с глубинами дефекта, характеризующими геометрию последнего. Тогда модель вычисляется на сетке объекта, в частности трехмерной сетке объекта. В качестве альтернативы имитация потока рассеяния также может проводиться на двумерной сетке или посредством регрессионной модели, которая строится на базе данных с МПР-наборами данных на основании имитаций методом конечных элементов и/или МПР-измерений.
На основании начальной геометрии дефекта, которую получают или задают, например, посредством справочной таблицы, сравнения баз данных или выполнения, в частности однократного выполнения, экспертной подпрограммы, определяют первый МПР-прогнозный набор данных в качестве исходного прогнозного набора данных, в частности путем имитации МПР-измерения. Имитацию МПР-измерения выполняют, например, посредством модели конечных элементов как прямого вычисления. При имитации измерения потока рассеяния необходимые для этого параметры устанавливают соответственно реальному измерению. Это касается, в частности, направления намагничивания, интенсивности магнитного поля и/или расстояния, на котором датчики находятся над поверхностью объекта. Тогда на основании начальной геометрии дефекта получают исходный прогнозный набор данных в виде имитированного измерения потока рассеяния. Этот набор данных уже можно было бы сравнить с эталонным набором данных объекта, но в начале итерации такое сравнение обычно не дает содержательных решений.
Отдельная подпрограмма для определения начальной геометрии дефекта в качестве его исходной геометрии не является абсолютно необходимой, но уменьшает вычислительное время, требующееся на последующих циклах выполнения программы. В качестве альтернативы, начальной геометрией дефекта может быть уже результат прогона экспертной подпрограммы. В качестве еще одной альтернативы, начальная геометрия дефекта может быть задана, например, как полностью гладкая, так сказать бездефектная, геометрия.
Начальную геометрию дефекта включают в итерационный процесс последовательных приближений, осуществляемый конкурирующими друг с другом экспертными подпрограммами, в качестве исходной геометрии дефекта. Сами экспертные подпрограммы, будучи, например, специализированными программными модулями, являются независимыми друг от друга, не взаимодействуя непосредственно друг с другом, и в зависимости от контролирующей подпрограммы или главного модуля им могут предоставляться ресурсы, в частности вычислительное время.
Исходя из разработанной в соответствующем экспертном модуле экспертной геометрии дефекта, для, в частности, каждой из этих геометрий определяют, в свою очередь, экспертный прогнозный набор данных, в частности путем имитации МПР-измерения. Таким образом, для каждой экспертной геометрии дефекта, имеющий, в частности, вид двумерного набора данных значений глубины дефекта, создается экспертный прогнозный набор данных в виде имитированного МПР-измерения. Имитация таких многопараметровых характеристик (полей), полученных МПР-методом, на основании соответствующих экспертных геометрий дефекта происходит соответственно описанному выше вычислению исходного прогнозного набора данных. В частности, вычисления на основании соответствующих экспертных геометрий дефекта выполняются параллельно. Это может сопровождаться построением базы данных, в которой сохраняются относящиеся к соответствующим дефектам многопараметровые характеристики потоков рассеяния, с той целью, чтобы позже и для других похожих данных можно было экономить вычислительное время.
Перед созданием экспертного прогнозного набора данных может быть целесообразной для вычисления экспертной геометрии дефекта адаптация, в частности частичное измельчение, взятой за основу сетки, в частности сетки дефектов, а при необходимости - и сетки объекта. Для этого можно использовать, в частности, методы морфинга сетки, позволяющие измельчать сетку объекта или сетку дефектов путем смещения и/или деления точек сетки, в частности в областях сильных градиентов, чтобы сделать возможным более точное определение геометрии или впоследствии более точное моделирование. В других областях, с более слабыми градиентами, сетка может становиться более крупной для экономии вычислительного времени. Так, используемую сетку автоматически адаптируют для оптимального оценивания геометрии дефекта. Одновременно этим достигается значительное уменьшение числа неизвестных, вследствие чего опять же экономится вычислительное время.
Если в результате сравнения эталонного набора данных с экспертным прогнозным набором данных на выходе экспертной подпрограммы установлено, что последний находится ближе к эталонному набору данных, чем предыдущий исходный прогнозный набор данных, то соответствующую экспертную геометрию дефекта предоставляют в качестве исходной геометрии дефекта другим экспертным подпрограммам, а также соответствующей экспертной подпрограмме. Тогда, исходя из этого решения, другие экспертные подпрограммы на следующем итерационном шаге могут начинать с этой геометрии, если только они не нашли, например, в своем еще текущем процессе определения геометрии дефекта, еще лучшее решение, которое в этом случае предоставляется другим или всем экспертным подпрограммам.
Среди конкурирующих друг с другом экспертных подпрограмм предпочтение в отношении располагаемых ресурсов устройства ЭОД отдают преимущественно тем, которые, как описывается ниже, являются более успешными в приближении к реальным измерительным данным, чем другие конкурирующие экспертные подпрограммы. Ресурсами устройства ЭОД являются, в частности, время центрального или графического процессора и/или приоритизация в распределении памяти.
Экспертные подпрограммы предпочтительно выполняются (в устройстве ЭОД) в конкуренции друг с другом таким образом, что выделение соответствующей экспертной подпрограмме ресурсов устройства ЭОД, в частности в виде вычислительного времени, происходит в зависимости от показателя успешности, учитывающего, в частности, число исходных геометрий дефекта, вычисленных этой экспертной подпрограммой и предоставленных одной или нескольким другим экспертным подпрограммам, и/или в зависимости от уменьшения функции приспособленности, учитывающего, в частности, число созданных для этого уменьшения экспертных прогнозных наборов данных. Состязание экспертных подпрограмм проявляется, в частности, в том, что часть программы, выполненная в виде контролирующей подпрограммы, выделяет соответствующим экспертным подпрограммам больше ресурсов, в частности в виде вычислительного времени, предпочтительно - времени центрального или графического процессора, в том случае, если они оказываются успешнее других экспертных подпрограмм. Экспертная подпрограмма успешна в том случае, если она нашла геометрию дефекта, снабженную результатом измерения поля рассеяния, например, имитированным результатом, которая более подходит к эталонному набору данных и поэтому предоставляется другим экспертным подпрограммам.
Отсюда может следовать, например, то, что особенно успешные экспертные подпрограммы получают более 50% всего располагаемого вычислительного времени, что заметно сокращает общую продолжительность выполнения предлагаемого в изобретении способа. Одновременно с этим можно задать программными средствами условие, что ни одна из экспертных подпрограмм или отдельные экспертные подпрограммы не может/могут оказаться ниже определенного уровня по выделяемой ей/им процентной доле вычислительного времени, чтобы избежать проблемы получения от отдельных программ сингулярных и экзотических геометрий дефектов или результатов их определения. Так можно найти выход из встречающейся в уровне техники ситуации блокады в случае, когда успешная до сих пор экспертная подпрограмма находит лишь локальное, а не глобальное решение.
Согласование посредством экспертных подпрограмм происходит до тех пор, пока не будет выполнен критерий останова. При этом речь идет, например, об остаточном различии в отношении измеренных и имитированных измерительных данных. Речь также может идти о внешнем критерии останова, например, основанном на располагаемом вычислительном времени, или о числе итераций, в частности, задаваемом числе итераций, или о вычислительном времени, в частности задаваемом или заданном, или определяемом по располагаемому вычислительному времени.
Было установлено, что предлагаемый в изобретении способ качественно улучшает точность определения дефектов. Соответствующие результаты вычисления максимальной нагрузочной способности показывают, например, возможность заметно более длительной эксплуатации трубопроводов. Заметно повышается точность определения дефектов. Максимальные рабочие давления, получаемые на основании имитированной геометрии дефекта в соответствии с рассмотренным выше и далее описываемым ниже способом, могут оцениваться как более высокие на величину до 50%, что значительно снижает стоимость эксплуатации трубопроводов и затраты их операторов на их техническое обслуживание и содержание. Впервые адекватное определение подхода согласно ASME B31G-2012, уровень 2 ("профиль речного дна") для "алгоритма определения остаточной прочности" теперь можно реализовать и в отношении МПР-наборов данных.
Выделение соответствующей экспертной подпрограмме ресурсов устройства ЭОД, в частности в виде времени центрального процессора, предпочтительно осуществлять в зависимости от числа исходных геометрий дефекта, предоставленных этой экспертной подпрограммой всем экспертным подпрограммам. При этом речь может идти, например, о числе временных интервалов (слотов) для вычисления экспертных прогнозных наборов данных в виде имитированных МПР-наборов данных, о числе процессорных ядер, параллельно обрабатывающих вычислительную задачу, и т.п.Кроме того, в контексте компьютерного программного продукта, реализующего предлагаемый в изобретении способ, может быть предусмотрена возможность адаптации этого компьютерного программного продукта к имеющимся в устройствах ЭОД ресурсам в виде процессорных ядер, объема памяти, архитектуры памяти, графических карт и т.д. Благодаря приоритизации особенно предпочитаемых экспертных подпрограмм и их алгоритмов определение реальной геометрии дефекта становится заметно более быстрым.
Для дальнейшей минимизации проблемы сингулярных, локальных решений предусматривается, в частности, что для определения геометрии дефекта или дефектов также используют дополнительный эталонный набор данных, линейно независимый от первого эталонного набора данных. Наборы данных являются линейно независимыми в случае, если они были созданы путем МПР-измерений с проведением намагничиваний объекта в направлениях, проходящих под углом друг к другу. Намагничивания проходят под углом друг к другу, когда средние напряженности соответствующих магнитных полей, наводимых в исследуемой области, ориентированы непараллельно или неконгруэнтно. В частности, вышеупомянутый угол составляет от 40° до 140°, предпочтительно - от 80° до 100°, а особенно предпочтительно - около 90°. На основании исходной геометрии дефекта определяют дополнительный исходный прогнозный набор данных, в частности создают его посредством дополнительной МПР-имитации, учитывающего эту линейную независимость, т.е. различные намагничивания, причем экспертную геометрию дефекта используют в качестве исходной геометрии дефекта только в том случае, если относящиеся к ней экспертные прогнозные наборы данных, определенные для обоих независимых намагничиваний, более подобны соответствующим эталонным наборам данных, чем определенные для обоих намагничиваний исходные прогнозные наборы данных, и/или когда улучшена функция приспособленности, учитывающая оба экспертных прогнозных набора данных. Благодаря параллельной или сопровождающей друг друга обработке обоих линейно независимых наборов данных и применению исходной геометрии дефекта, имитированные измерительные данные которой в целом должны быть лучше в отношении подобия или функции приспособленности, еще больше уменьшается опасность сингулярностей. Одновременно улучшается качество исходных прогнозных наборов данных, доступных для всех экспертных подпрограмм, т.е. имеющихся в их распоряжении. Таким образом можно еще больше уменьшить число итераций.
В частности, первый эталонный набор данных создают посредством МПР-измерения при осевом намагничивании, а второй эталонный набор данных создают посредством МПР-измерения при намагничивании в окружном направлении трубы. При этом соответствующие намагничивания трубы, или же объекта, производят под прямым углом друг к другу, что позволяет получить из результатов измерений магнитных потоков рассеяния максимальный объем информации, который благодаря одновременному рассмотрению соответствующих эталонных наборов данных и имитированных экспертных прогнозных наборов данных во время вычисления доступен в полном объеме. Описываемые ниже шаги способа осуществляются с учетом вышеизложенного аналогично при использовании двух эталонных наборов данных, полученных на основании линейно независимых намагничиваний.
Применение исходных и/или экспертных прогнозных наборов данных на основе прямой модели для имитации МПР-измерений, в частности посредством модели конечных элементов, обеспечивает быстрое проведение имитаций МПР-измерений. Имитация измерений потоков рассеяния на основании экспертных геометрий дефекта может быть реализована посредством специализированного программного модуля, вызываемого по отдельности отдельными экспертными подпрограммами, в частности под управлением и/или контролем контролирующей подпрограммы. Речь также может идти о нескольких модулях, предоставляемых в распоряжение соответствующей экспертной подпрограммы с распределением по отдельным вычислительным узлам.
Начальную геометрию дефекта предпочтительно создают посредством справочной таблицы, посредством одной из экспертных подпрограмм и/или посредством алгоритма машинного обучения, что, как описано выше, улучшает общее вычислительное время, в частности когда дополнительно уже осуществляется адаптация сетки.
В частности, измельчение сетки объекта и/или сетки дефектов может происходить в областях, в которых глубина имитированного дефекта или дефектов превышает пороговое значение, причем это пороговое значение может быть задаваемым так, чтобы к изменению сетки приводили только градиенты, находящиеся выше определенной величины. При таком измельчении может учитываться, в частности, общее число градиентов новой экспертной геометрии дефекта для достижения баланса между адаптацией соответствующей сетки, в частности сетки объекта, и последующими вычислительными операциями.
Измельчение сетки с целью уменьшения вычислительного времени может выполняться как уже на основании начального эталонного набора данных, так и перед вычислением экспертного прогнозного набора данных. Для этого также может быть предусмотрен отдельный программный модуль или отдельные субмодули соответствующих экспертных подпрограмм.
В частности, измельчение сетки объекта и/или сетки дефектов особенно эффективно уменьшает потребное время центрального процессора путем смещения и/или деления точек сетки за счет значительного уменьшения числа независимых переменных, которые должны использоваться в прямом алгоритме для имитации МПР-измерения. Смещение точек сетки также может использоваться для адаптации сетки объекта или сетки дефектов.
В качестве меры подобия экспертных прогнозных наборов данных и эталонных наборов данных предпочтительно используют функцию приспособленности, чтобы сравнение имитированных и измеренных наборов данных выполнять на основании стандартных подпрограмм, а соответственно - быстро, т.е. с экономией вычислительного времени.
В частности, исходную геометрию дефекта в виде двумерного набора данных или ссылающийся на нее указатель сохраняют в области памяти устройства ЭОД, доступной для всех экспертных подпрограмм. Эта область памяти, в частности, находится, в свою очередь, под контролем контролирующей подпрограммы, что позволяет осуществлять приоритизацию отдельных экспертных подпрограмм и в этом отношении.
Вместо того, чтобы каждый раз в начале новой итерации использовать исходную геометрию дефекта, хранящуюся, например, в центральной области памяти, доступной для всех экспертных подпрограмм, по меньшей мере одна экспертная подпрограмма в начале новой итерации может, отказавшись от заимствования исходной геометрии дефекта, адаптировать свою собственную экспертную геометрию дефекта. Для этого экспертная подпрограмма может содержать функциональную спецификацию, в которой, например, в зависимости от поисковых стратегий, используемых в других экспертных подпрограммах, целенаправленно выбирается противоположная стратегия. В подобном случае экспертные подпрограммы могут косвенно влиять друг на друга. Такой образ действий может быть выгоден, в частности, при установлении того, что до сих пор всегда успешная программа предпочитает нереалистичное решение. Такое решение можно распознать, например, по недопустимым значениям, касающимся глубины дефекта. Если экспертная подпрограмма, не предпринимающая заимствования исходной геометрии дефекта, не дает улучшенных решений, ей автоматически назначается более низкий приоритет, вследствие чего ей предоставляется все меньше вычислительного времени.
В качестве критерия останова или же сходимости предпочтительно можно принимать ненаступление после множества итераций изменения исходной геометрии дефекта или, в более общем случае, геометрии сетки дефектов и/или сетки объекта, которое можно охарактеризовать как существенное. Тогда лучшим является решение, найденное до сих пор. Критерий останова предпочтительно выбирают так, чтобы наблюдаемые вариации в имитации потока рассеяния, которые приводили бы к измельчению сетки объекта или сетки дефектов, были существенно ниже, например на коэффициент, меньший 10, в частности равный 2, вариаций, следующих из дисперсии индивидуального измерения, в частности из погрешности измерения, и отдельно описанных, например, на основе так называемых "Существенных переменных" стандарта API 1163. Этим достигается то, что точность окончательной модели находится в районе точности, заданной самим измерением. Соответственно в качестве критерия останова предпочтительно используют сравнение вариации экспертного прогнозного набора данных с дисперсией измерения реального набора данных. Критерий останова, вызывающий останов выполнения программы, в частности выдачу или сохранение вычисленной к данному моменту исходной геометрии дефекта, предпочтительно может описываться предварительно настраиваемыми параметрами программы.
В частности, в распоряжении экспертной подпрограммы имеется несколько алгоритмов для согласования экспертной геометрии дефекта. При этом речь может идти о подходах из области машинного обучения, стохастической оптимизации, функций эмпирических и/или численных моделей. В частности, в экспертных подпрограммах также могут использоваться показатели опыта проводящих оценку специалистов. В экспертной подпрограмме предпочтительно выбирают различные алгоритмы либо на основании генерации случайных чисел, либо посредством функции выделения. Так обеспечивается достаточно разноплановый подход, позволяющий целенаправленно и в конкурентных условиях учитывать все решения.
Поставленная в начале описания задача решается также в способе определения предела нагрузочной способности объекта, нагружаемого, по меньшей мере в эксплуатации, давлением и выполненного, в частности, в виде нефтяного, газового или водяного трубопровода, причем при осуществлении способа набор данных, описывающий один или несколько дефектов, используют в качестве входного набора данных при вычислении предела нагрузочной способности, реализованного, в частности, в виде построения прямой модели, причем входной набор данных вначале создают рассмотренным выше или описываемым ниже способом определения геометрии дефекта. Выгодное представление геометрии дефекта, в частности в виде истинной непараметризованной трехмерной геометрии или в виде двумерной поверхности с соответствующими значениями глубины, делает излишними упрощения, до сих пор считавшиеся в отрасли необходимыми, вследствие чего и по этой причине недостижимым ранее образом обеспечивается повышение точности определения дефектов в целом.
Если раньше точность была ограничена указанием точки максимальной глубины дефекта, теперь с высокой точностью определяют весь профиль. Как правило, точность максимальной глубины сводится к мере, достижимой в зависимости от точности измерения, т.е. примерно ±5% толщины стенки, по сравнению с примерно ±10% толщины стенки, до сих пор применявшимися при классификации по размерам согласно уровню техники, описанному в начале. Точность же прогноза предела нагрузочной способности как раз для критических случаев повышается в зависимости от геометрии дефекта со значений, составляющих, например, ±50% до достижимых теперь ±5%. Таким образом, достигаемое изобретением преимущество заключается, в частности, в достигнутом впервые адекватном представлении геометрии дефекта, которое и обеспечивает это повышение прогноза предела нагрузочной способности.
Другие преимущества изобретения и подробности его осуществления рассматриваются ниже со ссылками на чертежи, на которых схематически показано:
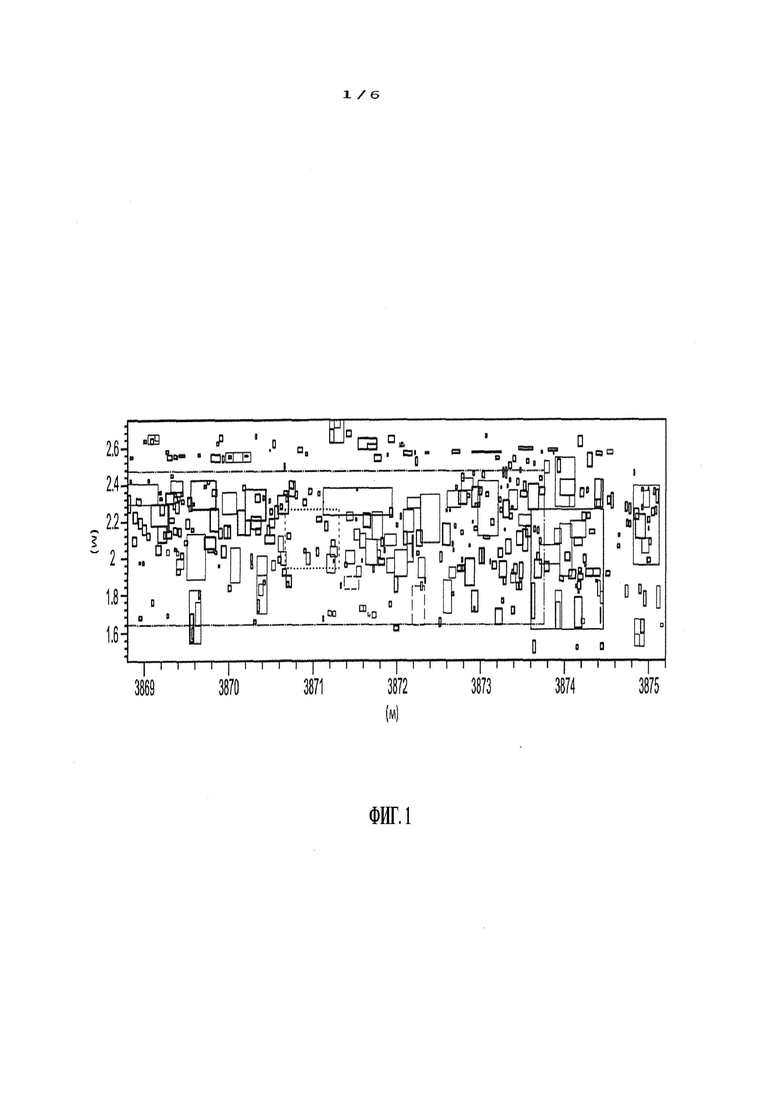
фиг. 1 - определение дефектов согласно уровню техники,
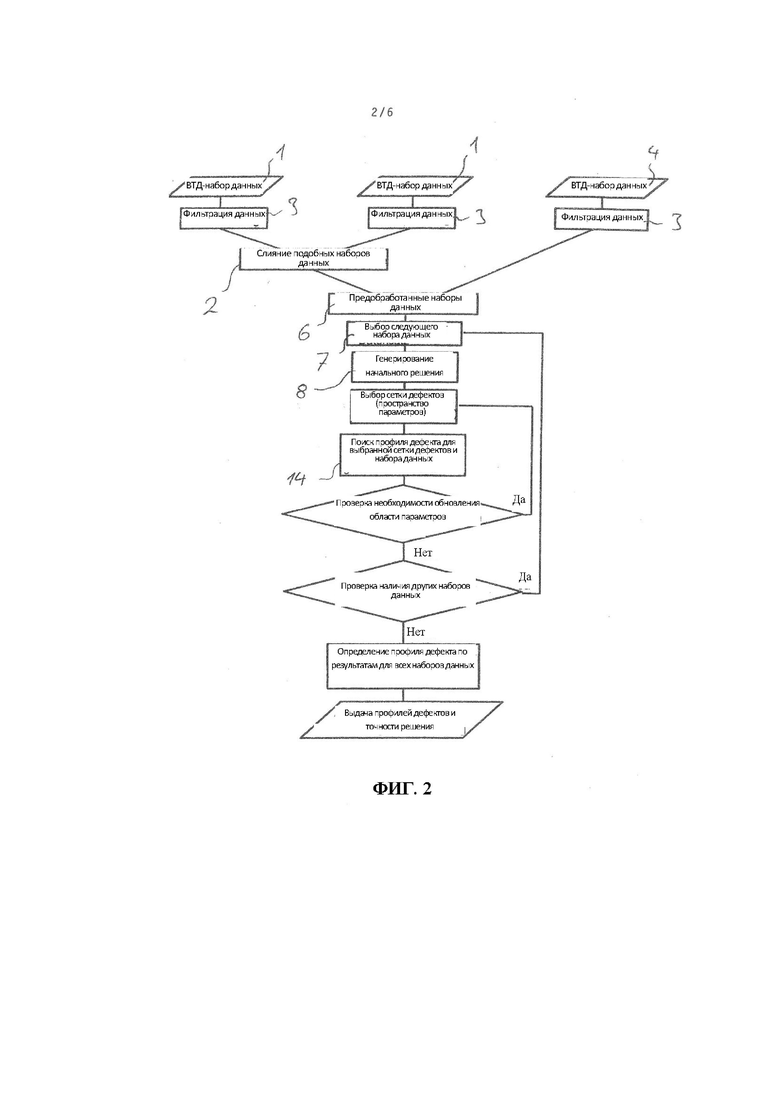
фиг. 2 - схематическое представление предлагаемого в изобретении способа,
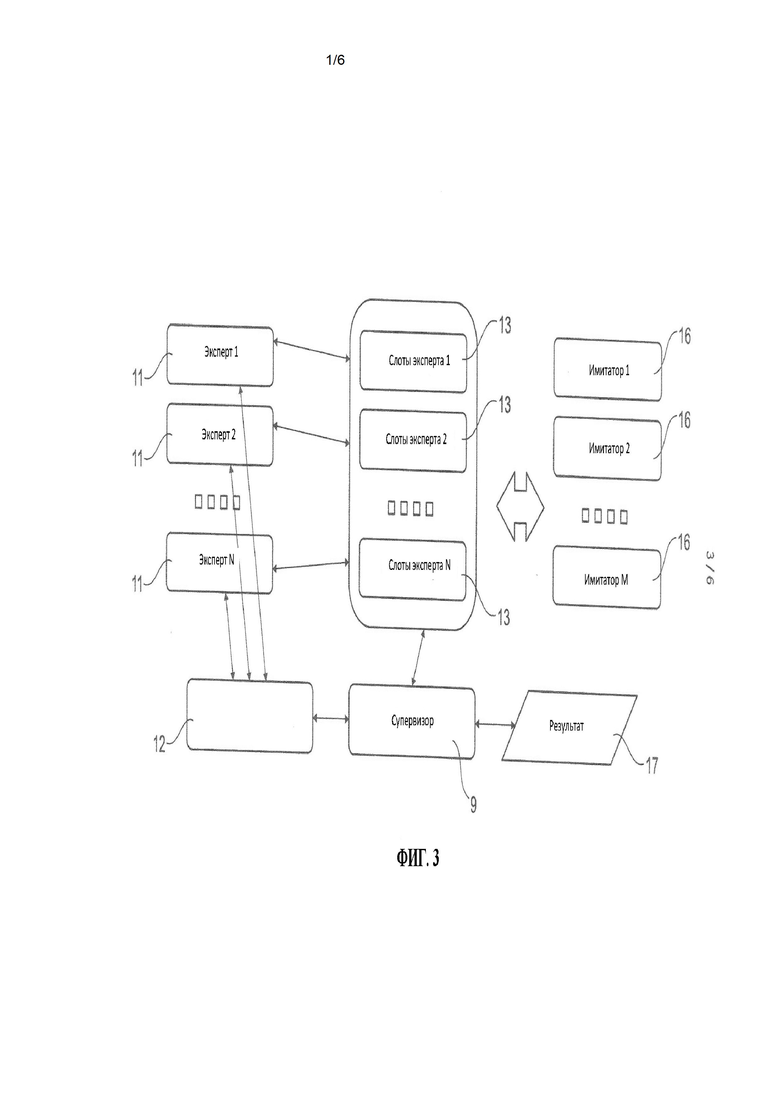
фиг. 3 - более подробное пояснение фрагмента схема на фиг. 2,
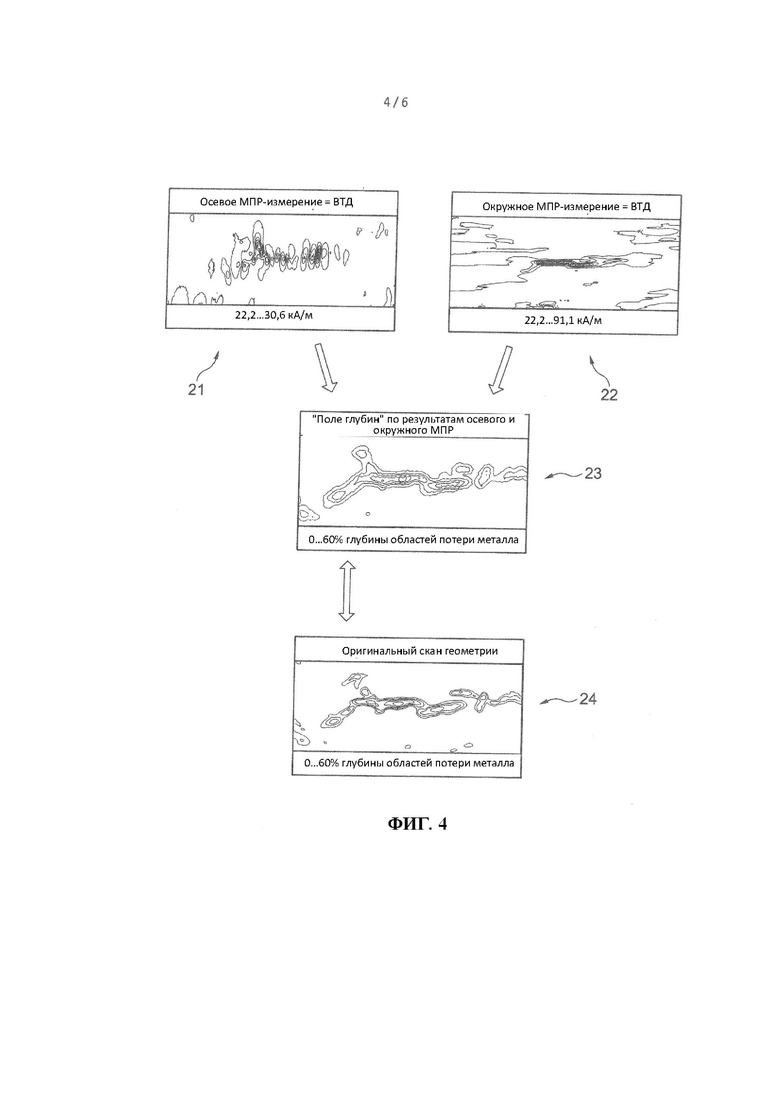
фиг. 4 - сравнение результата осуществления предлагаемого в изобретении способа с измерительными данными,
фиг. 5 схематическое представление измельчения сетки как части предлагаемого в изобретении способа,
фиг. 6 - результат осуществления предлагаемого в изобретении способа.
Отдельные признаки описываемых ниже примеров осуществления изобретения, используемые в сочетании с признаками независимых пунктов формулы изобретения, могут составлять частные варианты осуществления изобретения.
Согласно уровню техники оценку МПР-данных трубы выполняют в соответствии с фиг. 1 посредством определения кубоидов (коробок), в частности также на эмпирической основе. Показанные на чертеже кубоиды имеют соответствующие измерения по длине, ширине и глубине. Расстояния, отложенные по осям х и у, выражены в метрах ([м]). Проверка фактической геометрии дефектов, положенной в основу этой оценки, посредством лазерного сканирования поверхности, т.е. посредством прямого измерения, показала, что максимальное разрывное давление, определяемое на основании геометрии дефектов, принятой путем анализа МПР-данных, как 4744,69 кПа, составляет лишь 55,2% максимального разрывного давления, вычисленного на основании фактической геометрии. Согласно уровню техники рабочее давление, которое должно соблюдаться для безопасной эксплуатации трубопровода и которое, по эмпирической оценке, составляет 3621,29 кПа, заметно ниже возможного безопасного рабочего давления.
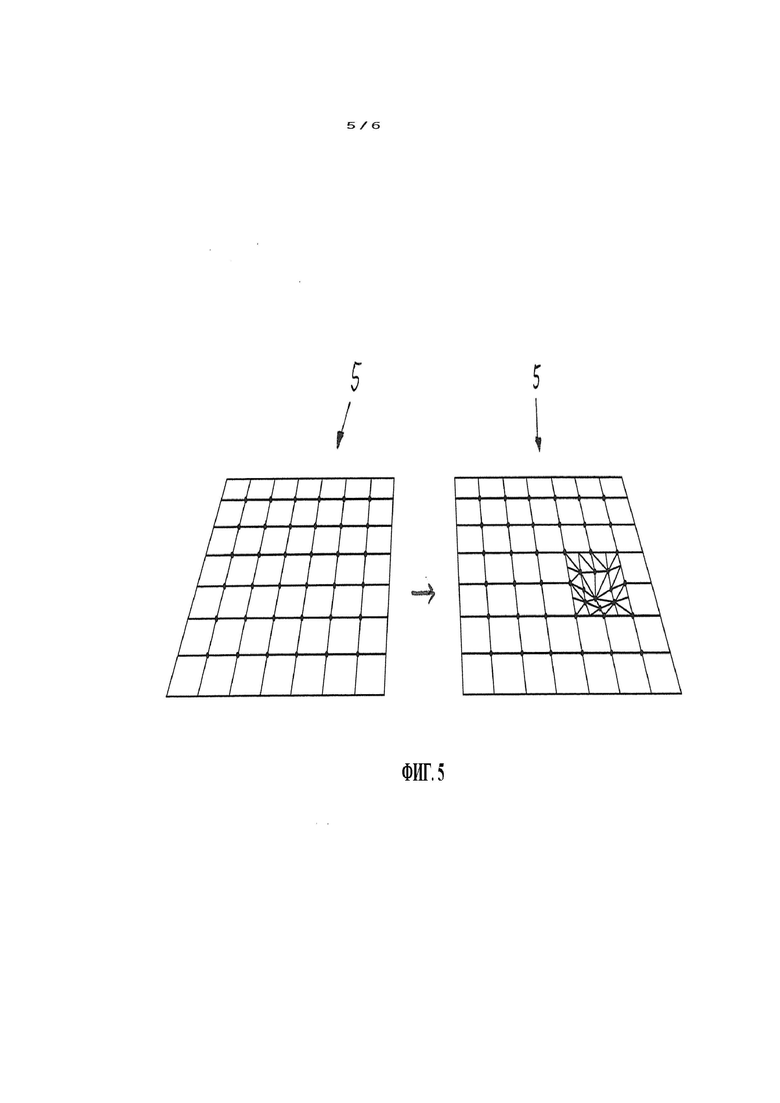
В соответствии с предлагаемым в изобретении способом в одном примере его осуществления поверхность трубы представляют двумерной поверхностью сетки. Геометрию дефекта можно описать как вектор значений D глубины, находящихся на сетке 5 дефектов (фиг. 5). Эту геометрию дефекта сравнивают на основании результата функции приспособленности F(D), учитывающей МПР-многопараметровые характеристики, относящиеся к соответствующим геометриям, с исходной геометрией дефекта. При этом исходят из того, что чем меньше значение функции приспособленности, тем ближе принятая экспертная геометрия дефекта к реальной геометрии:
В этом выражении М - число одновременно обрабатываемых наборов данных (реальные МПР-наборы данных), Hcal - результат имитации МПР-измерения, Hm - измеренные данные как результат МПР-измерения (эталонный набор данных) и R(D) - регуляризирующий член, который можно представить следующим образом:
R(D)=α|∇D|,
где α - масштабирующий член.
Процесс осуществления предлагаемого в изобретении способа описывается ниже, по меньшей мере на отдельных этапах, со ссылкой на фиг. 2, где множество экспертных подпрограмм 11, выполняемых параллельно и в конкуренции друг с другом, представлено одним блоком 14.
В качестве входных наборов данных можно, например, объединить результаты МПР-измерений при нескольких прогонах одного и того же внутритрубного инспекционного прибора согласно блоку 2. Оба набора данных 1, представляющих результаты внутритрубной диагностики (ВТД), для их лучшего объединения, или слияния, можно предварительно отфильтровать и привести в соответствие друг другу (шаг 3 способа), например, для уменьшения возможных артефактов или фоновых шумов. Кроме того, можно использовать еще один (дополнительный) набор данных 4, созданный на основании дополнительного, линейно независимого намагничивания и также отфильтрованный для приведения в соответствие идентичным структурам сетки, в результате чего на шаге 6 способа имеется два приведенных в соответствие друг другу эталонных набора данных, созданных на основании измерительных прогонов с применением линейно независимых намагничиваний.
Точно согласованные друг с другом наборы данных можно обрабатывать совместно, причем предлагаемый в изобретении способ реализует одновременную обработку наборов данных путем применения функции приспособленности, учитывающей объединенные наборы данных.
На шаге 7 для дальнейшей обработки выбирают первый из эталонных наборов данных, полученных на шаге 6. Для этого на шаге 8 сначала принимают, в частности, а именно в рассматриваемом случае генерируют, начальную геометрию дефекта в качестве исходной геометрии дефекта, которая, например, основывается на нормализованном измерительном сигнале S(x,y)/(max S). Например, геометрия дефекта может быть выведена из функции порогового значения, учитывающей амплитуду в точках сетки, в которых сигнал превышает определенное граничное значение / (например 0,2):
Вышеописанное приближение приводит к числу N значений глубины дефекта в соответствующих точках сетки:
Di=i wt/N*G,
где wt - толщина стенки трубы, а i - индекс, используемый также как значение для определения значения глубины дефекта. Для такой геометрии дефекта вычисляют функцию приспособленности, и в качестве входного решения используют профиль с наименьшим значением функции:
Dinit=arg min F(Di)
Это входное решение затем предоставляют отдельным экспертным модулям в качестве исходной геометрии дефекта. Прежде всего, с целью уменьшения вычислительного времени число значений параметров (элементы вектора D), описывающих геометрию дефекта, может поддерживаться как можно меньшим. Это достигается, в частности, посредством динамической адаптации сетки. Поскольку число значений глубины соответствует числу узловых точек в сетке 5 дефектов, число узлов одновременно является также числом параметров дефекта. Начиная со сравнительно крупной сетки, ее постепенно измельчают в значимых областях.
В качестве примера, для заданного интервала между узловыми точками, составляющего, например, 14 мм, вытекающего отсюда размера ячеек сетки 14 мм × 14 мм и граничных значений глубины дефектов, составляющих 30%, 50% и 80% толщины стенки, можно получить представленное на фиг. 5 измельчение сетки в ее значимой области, причем последовательно делят те ячейки, в которых превышаются приведенные выше значения глубины. Тогда деформация сетки коррелирует с принятой геометрией дефекта, т.е. в областях больших градиентов находится большее число точек сетки.
В устройстве ЭОД в соответствии с предлагаемым в изобретении способом имитируется протекание рабочего процесса группы экспертных подпрограмм 11, находящихся в состязании друг с другом. Для этого программа может иметь различные модули, которые независимо друг от друга и, в частности, несинхронно друг с другом могут вводить данные в определенные области устройства ЭОД, чтобы обеспечить возможность дальнейшей обработки данных в этом устройстве. Это происходит, в частности, под надзором контролирующей подпрограммы (супервизора) 9 (фиг. 3). Таким образом, множество экспертных подпрограмм 11 в зависимости от определенного выше успеха, т.е., например, числа исходных геометрий дефекта, записанных в общую область памяти 12, сохраняет за собой определенное число вычислительных временных интервалов (слотов) 13, чтобы иметь возможность создавать соответствующие экспертные геометрии дефекта и/или выполнять относящиеся к ним МПР-имитации или в случае независимого модуля МПР-имитации обеспечивать выполнение МПР-имитации этим модулем. Это соответствует на фиг. 2 блоку 14, причем этот блок в качестве примера означает работу нескольких экспертных подпрограмм 11 (фиг. 3). Исходя из отдельных вычислительных временных интервалов 13, в рассматриваемом примере осуществления изобретения МПР-имитации отдельных экспертных геометрий дефекта с целью составления экспертных прогнозных наборов данных также выполняются в имитационных модулях (имитаторах) 16 под надзором контролирующей подпрограммы 9. Чем больше временных интервалов 13 имеется в распоряжении экспертной подпрограммы, тем больше доля ресурсов ЭОД, выделяемая этой экспертной подпрограмме. Число программных модулей, предусмотренных для выполнения МПР-имитаций, предпочтительно равно числу временных интервалов. Контролирующая подпрограмма 9 контролирует число итераций и вытекающие отсюда изменения исходной геометрии дефекта, а также контролирует достижение соответствующего критерия останова. Затем результат выводится в соответствии с блоком 17.
Число вычислительных временных интервалов (слотов) 13, имеющихся в распоряжении экспертной подпрограммы 11, и предоставляемые затем имитационные подпрограммы могут варьироваться таким образом, что первая экспертная подпрограмма, например, может использовать до 50% общего вычислительного времени, располагаемого для вычислительных временных интервалов и имитационных подпрограмм.
В области памяти 12 сохраняются, как показано, исходные геометрии дефекта. При этом речь может идти об области памяти, доступной экспертным подпрограммам 11. В этой области памяти также могут сохраняться файлы журналов экспертных подпрограмм 11 и контролирующей подпрограммы 9, а также инструкции экспертным подпрограммам 11, которые в этом случае реализуются экспертными подпрограммами независимо. Например, такой инструкцией может быть команда прерывания, применяемая при достижении критерия останова.
Экспертные подпрограммы 11 предпочтительно представляют собой независимые программные модули, создающие новые экспертные геометрии дефекта и вводящие их в имитационные подпрограммы 16. Кроме того, в экспертных подпрограммах 11 может создаваться на основании экспертного прогнозного набора данных рассмотренная выше функция приспособленности, и эта функция приспособленности может сравниваться с сохраненным в области памяти 12 исходным прогнозным набором данных. Если экспертный прогнозный набор данных в целом более подобен эталонному набору данных, а при наличии линейно независимых измерительных наборов данных - соответственно обоим эталонным наборам данных, чем сохраненный в области памяти 12 набор данных, этот экспертный прогнозный набор данных используется в качестве нового исходного прогнозного набора данных.
Например, в экспертных подпрограммах 11 новая геометрия дефекта создается на основании генерации случайных чисел. Для этого могут использоваться алгоритмы машинного обучения или эмпирические правила. Однако для обеспечения еще более улучшенной сходимости решений целесообразно предусмотреть реализацию по меньшей мере двух базовых экспертных подпрограмм, как это описывается ниже.
Эти поисковые стратегии, реализуемые предпочтительно всегда при осуществлении предлагаемого в изобретении способа, основываются на принятом вероятностном распределении р(х, у) точек сетки, значения глубины которых дают максимальное уменьшение функции приспособленности. Вероятностная функция используется для идентификации N точки сетки (xn, yn). В каждой из наблюдаемых точек функция глубины, описывающая, например, глубину коррозии в этом месте сетки, изменяется на ΔD, причем знак этого изменения распределяется на основании генерации случайных чисел. Число выбранных точек N также может выбираться на основании генерации случайных чисел:

Выбором вероятностной функции р(х, у) можно реализовать различные экспертные стратегии, например:
Этот алгоритм реализует вариацию глубин дефекта, в которой предпочтение отдается точкам сетки с наибольшей глубиной. Другая стратегия может выглядеть следующим образом:

Такой алгоритм варьирует геометрию дефекта в положениях, в которых имитированный измерительный сигнал для наилучшего известного решения Ннаилучш. имеет наибольшее отличие от измеренного сигнала.
На этой основе путем вариаций числа наблюдаемых точек сетки и ΔD можно строить различные экспертные подпрограммы или их алгоритмы. В качестве примера, можно использовать шесть следующих экспертных подпрограмм:
 N=1 и ΔD=1% толщины стенки
N=1 и ΔD=1% толщины стенки
 N=2 и ΔD=5% толщины стенки
N=2 и ΔD=5% толщины стенки
 N=3 и ΔD=5% толщины стенки
N=3 и ΔD=5% толщины стенки
 N=1 и ΔD=1% толщины стенки
N=1 и ΔD=1% толщины стенки
 N=2 и ΔD=5% толщины стенки
N=2 и ΔD=5% толщины стенки
 N=3 и ΔD=5% толщины стенки
N=3 и ΔD=5% толщины стенки
Представленная на фиг. 3 контролирующая подпрограмма 9 имеет, в частности, как описано выше, две функции: Во-первых, проверяется достижение критерия останова, а во-вторых, ресурсы устройства ЭОД распределяются между отдельными экспертами на основании их успехов. Мера такого успеха описывается выражением:
где ΔF - уменьшение функции приспособленности F результатом соответствующей экспертной подпрограммы, a N - число необходимых для этого имитаций. Рейтинг n экспертных подпрограмм можно принять как:
Тогда число вычислительных временных интервалов NS для экспертной подпрограммы на одной итерации описывается выражением:
NS=int(Rn Nвсе),
где Nвсе - число всех располагаемых временных интервалов.
В имитационных подпрограммах 16 имитируется МПР-измерение для экспертной геометрии дефекта. Экспертная подпрограмма может итерироваться до тех пор, пока она не найдет решение с экспертным прогнозным набором данных, лучшим, чем сохраненный в области памяти 12 исходный прогнозный набор данных. Если такое решение найдено, экспертная подпрограмма 11 может обрабатывать еще один линейно независимый набор данных или пытаться достичь дальнейших лучших решений, исходя из уже улучшенного решения.
Если экспертными подпрограммами было выработано несколько наборов данных из различных итераций, которые невозможно привести в соответствие друг к другу до степени совпадения, в рамках осуществления предлагаемого в изобретении способа возможно также автоматизированное наложение полученных геометрий, причем в отдельных точках сетки в качестве консервативной оценки берется максимальная глубина:

для n=1…N, где N - число наборов данных, которые должны обрабатываться друг за другом. Исходя из профиля глубин, полученного таким наложением геометрий дефекта, можно, в свою очередь, имитировать МПР-сигнал. Результирующая ошибка может быть получена из ошибок соответствующих наборов данных в отдельных вычислениях:
Е=||Hcal(D)-Hm||
Для демонстрации эффективности предлагаемого способа было отработано множество экспериментальных сценариев, причем согласно фиг. 4 используются данные двух инспекционных прогонов МПР-методом с выполнением линейно независимых друг от друга намагничиваний.
На фиг. 4 номером 21 обозначено изображение, отражающее результат реального МПР-измерения с намагничиванием в осевом направлении, а изображение под номером 22 отражает результат измерения в окружном направлении. Результат вычисления геометрии дефекта, полученный предлагаемым в изобретении и описанным выше способом, обозначен номером 23. Контурные линии равномерно делят (на подобласти) область с потерями металла от 0 до 60%, как и на изображении под номером 24. На изображении 24 показана фактически отсканированная, т.е. подвергнутая прямому измерению, наружная поверхность участка трубопровода, соответствующего изображениям 21 и 22. Сравнение изображений показывает очень высокую степень совпадения результата измерения, выполненного путем лазерного сканирования, с решением, достигаемым при осуществлении предлагаемого в изобретении способа. Это решение заметно лучше решения, соответствующего известной из уровня техники оценке. При этом можно исходить из того, что расхождения между результатом осуществления предлагаемого в изобретении способа и результатом измерения, выполненного путем лазерного сканирования, обусловлены преимущественно техническими допусками.
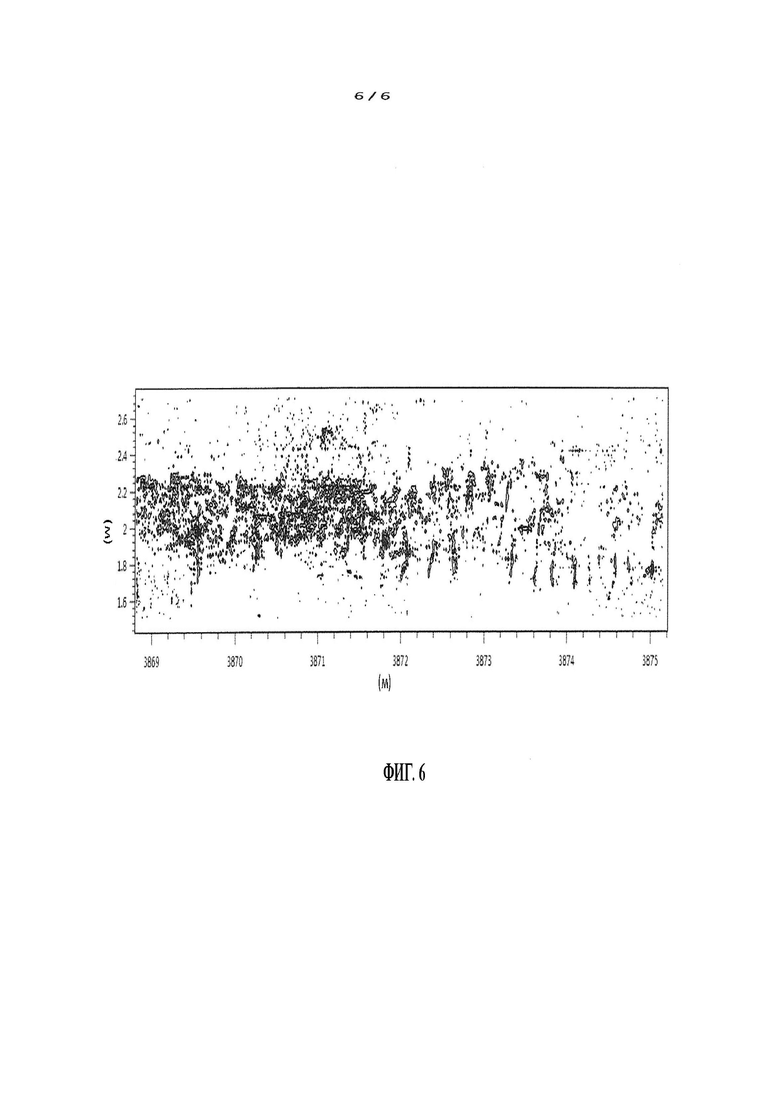
Применение традиционного подхода к определению геометрии дефектов, распространенного в уровне техники и отраженного на фиг. 1, дает в результате вышеупомянутое максимальное разрывное давление 4744,69 кПа. Осуществление предлагаемого в изобретении способа дает для того же МПР-набора данных, что положен в основу геометрии дефектов на фиг. 1, геометрию дефектов, показанную на фиг. 6 (контурные линии очерчивают области глубиной около 2 мм), исходя из которой максимальное разрывное давление составляет 8543,46 кПа. Это значение достигает 99,4% максимального разрывного давления, определенного по фактической геометрии дефектов, полученной лазерным сканированием. Соответственно трубопровод, исследованный предлагаемым в изобретении способом, может эксплуатироваться при безопасном рабочем давлении 6520,53 кПа. По сравнению с безопасным рабочим давлением 3621,29 кПа, полученным путем оценки в соответствии с уровнем техники (фиг. 1), это дает значительные преимущества для операторов трубопроводов. Применение предлагаемого в изобретении способа позволяет заметно реалистичнее оценивать состояние трубы, а значит, и определять давление, диктуемое условиями надежной эксплуатации трубопровода, при поддержании надлежащего уровня эксплуатационной безопасности. При помощи предлагаемого в изобретении способа, предусматривающего конкуренцию экспертных подпрограмм за ресурсы устройства ЭОД, такой результат может предоставляться операторам трубопроводов быстрее или, по меньшей мере, с теми же затратами времени на интерпретацию, что и в уровне техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ долгосрочного прогнозирования индивидуального ресурса гидроагрегата в условиях часто меняющихся режимных факторов | 2020 |
|
RU2756781C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОЙ ПРЕДИКТИВНОЙ ДИАГНОСТИКИ ОБЪЕКТОВ | 2023 |
|
RU2822087C1 |
| АДАПТИВНОЕ УПРАВЛЕНИЕ ПРОЦЕССАМИ АДДИТИВНОГО ПРОИЗВОДСТВА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ МАШИННОГО ОБУЧЕНИЯ | 2018 |
|
RU2722525C1 |
| ОПРЕДЕЛЕНИЕ РАДИУСА ПОГРЕШНОСТИ МЕСТОПОЛОЖЕНИЯ | 2015 |
|
RU2680093C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ИДЕНТИФИКАЦИИ БИОЛОГИЧЕСКИХ МИКРООБЪЕКТОВ И ИХ НАНОКОМПОНЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406078C2 |
| СЕГМЕНТАЦИЯ И ПРОГНОЗИРОВАНИЕ ВРЕМЕННЫХ ПАТТЕРНОВ ШЛЕЙФОВ НИЗКОГО УРОВНЯ | 2020 |
|
RU2783420C1 |
| Способ определения аномалии в киберфизической системе | 2022 |
|
RU2790331C1 |
| Способ мониторинга технического состояния строительных объектов с обработкой результатов, характеризующих состояние объекта мониторинга, с использованием мягких вычислений | 2016 |
|
RU2649075C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ ВЕЛИЧИН ДЕФЕКТОВ ПОСРЕДСТВОМ SAFT (СПОСОБА ФОКУСИРОВКИ СИНТЕЗИРОВАННОЙ АПЕРТУРЫ) | 2014 |
|
RU2615208C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ЭЛЕКТРОТЕХНИЧЕСКИХ УСТРОЙСТВ | 1994 |
|
RU2107303C1 |
Использование: для передающей или приемной антенны летательного аппарата в дециметровом диапазоне длин волн. Сущность изобретения заключается в том, что осуществляют определение начальной геометрии дефекта в качестве его исходной геометрии на основании одного или нескольких измерений методом магнитных потоков рассеяния (МПР-измерений), определение первого МПР-прогнозного набора данных в качестве исходного прогнозного набора данных на основании исходной геометрии дефекта и итерационное согласование исходной геометрии дефекта с геометрией реального(-ых) дефекта(-ов) посредством устройства электронной обработки данных (ЭОД) и посредством нескольких экспертных подпрограмм, выполняемых в конкуренции и предпочтительно параллельно друг с другом. Технический результат: обеспечение возможности точной реконструкции реального дефекта по его набору измерительных данных, полученных методом магнитных потоков рассеяния (МПР), а также обеспечение возможности как можно более точного определения предела нагрузочной способности объекта с коррозионным поражением. 2 н. и 13 з.п. ф-лы, 6 ил.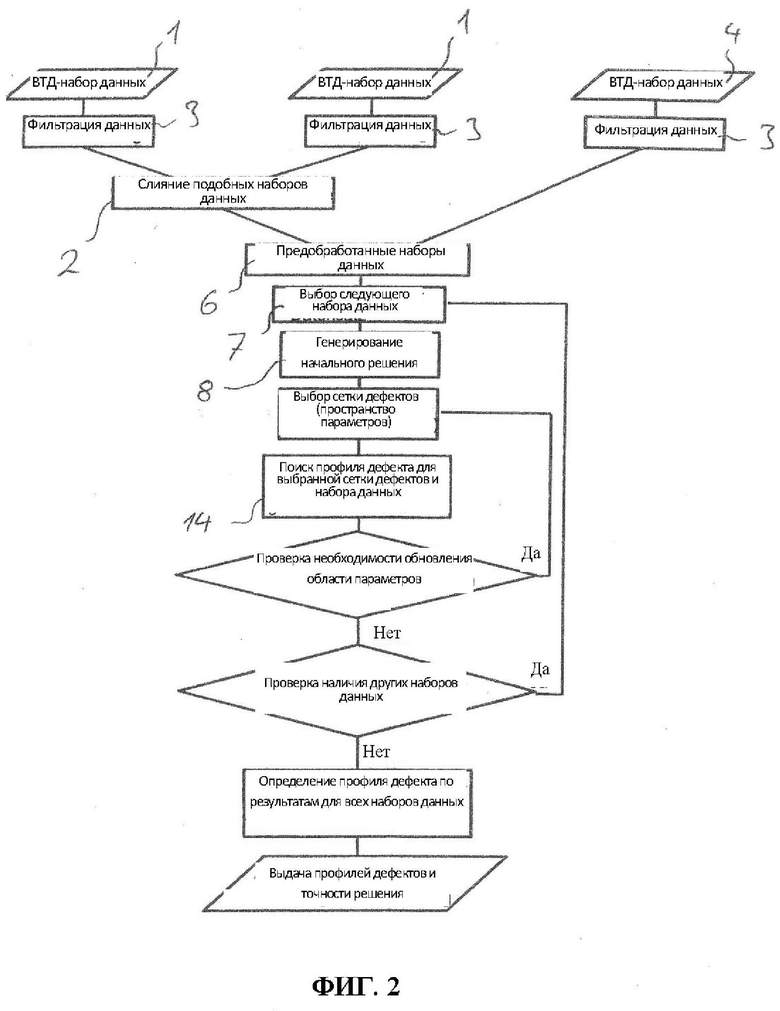
1. Способ определения геометрии одного или нескольких реальных исследованных дефектов намагничиваемого объекта, в частности трубы или резервуара, при помощи эталонного набора данных объекта, созданного на основании одного или нескольких измерений методом магнитных потоков рассеяния (МПР-измерений),
предпочтительно включающий по меньшей мере частичное представление объекта посредством устройства электронной обработки данных (ЭОД), в частности на по меньшей мере трехмерной сетке объекта или посредством нее,
а также включающий определение начальной геометрии дефекта в качестве его исходной геометрии, в частности на сетке объекта или на по меньшей мере двумерной сетке (5) дефектов,
определение первого МПР-прогнозного набора данных в качестве исходного прогнозного набора данных на основании исходной геометрии дефекта, в частности путем имитации МПР-измерения или предоставления МПР-набора данных,
и итерационное согласование исходной геометрии дефекта с геометрией реального(-ых) дефекта(-ов) посредством устройства ЭОД и посредством нескольких экспертных подпрограмм (11), выполняемых в конкуренции и предпочтительно параллельно друг с другом,
причем в соответствующих экспертных подпрограммах (11) посредством по меньшей мере одного собственного алгоритма и на основании исходной геометрии дефекта создается соответствующая экспертная геометрия дефекта,
на основании соответствующей экспертной геометрии дефекта определяют, в частности путем имитации МПР-измерения или предоставления МПР-набора данных, соответствующий экспертный прогнозный набор данных,
экспертную геометрию дефекта, лежащую в основе соответствующего экспертного прогнозного набора данных, предоставляют по меньшей мере одной из экспертных подпрограмм (11), предпочтительно нескольким, в частности всем экспертным подпрограммам, в качестве новой исходной геометрии дефекта для дальнейшего согласования с геометрией реального(-ых) дефекта(-ов) в том случае, если этот экспертный прогнозный набор данных более подобен эталонному набору данных, чем исходный прогнозный набор данных, после чего экспертный прогнозный набор данных, относящийся к новой исходной геометрии дефекта, используют в качестве нового исходного прогнозного набора данных,
причем итерационное согласование посредством экспертных подпрограмм происходит до тех пор, пока не будет выполнен критерий останова.
2. Способ по п. 1, отличающийся тем, что экспертные подпрограммы (11) выполняются в конкуренции друг с другом таким образом, что выделение соответствующей экспертной подпрограмме ресурсов устройства ЭОД, в частности в виде вычислительного времени, предпочтительно времени центрального и/или графического процессора, происходит в зависимости от показателя успешности, учитывающего, в частности, число исходных геометрий дефекта, вычисленных этой экспертной подпрограммой и предоставленных одной или нескольким другим экспертным подпрограммам (11), и/или в зависимости от уменьшения функции приспособленности, учитывающего, в частности, число созданных для этого уменьшения экспертных прогнозных наборов данных.
3. Способ по одному из предыдущих пунктов, отличающийся тем, что функцию приспособленности используют в качестве меры подобия экспертных прогнозных наборов данных и эталонных наборов данных.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что для определения геометрии дефекта(-ов) также используют дополнительный эталонный набор данных, линейно независимый по намагничиванию от первого эталонного набора данных, и на основании исходной геометрии дефекта определяют дополнительный исходный прогнозный набор данных, в частности посредством учитывающей эту линейную независимость дополнительной МПР-имитации, причем экспертную геометрию дефекта используют в качестве исходной геометрии дефекта только в том случае, если относящиеся к ней экспертные прогнозные наборы данных, определенные для обоих независимых намагничиваний, более подобны соответствующим эталонным наборам данных, чем определенные для обоих намагничиваний исходные прогнозные наборы данных, и/или когда улучшена функция приспособленности, учитывающая оба экспертных прогнозных набора данных.
5. Способ по п. 4, отличающийся тем, что первый эталонный набор данных создан посредством МПР-измерения при осевом намагничивании, а второй эталонный набор данных создан посредством МПР-измерения при намагничивании в окружном направлении трубы.
6. Способ по одному из предыдущих пунктов, отличающийся тем, что исходные и/или экспертные прогнозные наборы данных создают на основании прямой модели для имитации МПР-измерения, в частности посредством модели конечных элементов.
7. Способ по одному из предыдущих пунктов, отличающийся тем, что начальную геометрию дефекта создают посредством справочной таблицы, посредством одной из экспертных подпрограмм (11) и/или посредством алгоритма машинного обучения.
8. Способ по одному из предыдущих пунктов, отличающийся тем, что сетку (5) дефектов измельчают в областях, в которых глубина имитированного(-ых) дефекта(-ов) превышает пороговое значение.
9. Способ по одному из предыдущих пунктов, отличающийся тем, что перед вычислением соответствующего экспертного прогнозного набора данных сетку объекта и/или сетку (5) дефектов измельчают.
10. Способ по одному из предыдущих пунктов, отличающийся тем, что исходную геометрию дефекта или ссылающийся на нее указатель сохраняют в области памяти (12) устройства ЭОД, доступной для всех экспертных подпрограмм (11).
11. Способ по одному из предыдущих пунктов, отличающийся тем, что в качестве критерия останова принимают ненаступление после множества итераций существенного изменения исходной геометрии дефекта, и/или геометрии сетки объекта, и/или сетки (5) дефектов, и/или исходного прогнозного набора данных, и/или по меньшей мере одного из экспертных прогнозных наборов данных.
12. Способ по п. 11, отличающийся тем, что в качестве критерия останова используют сравнение вариации экспертного прогнозного набора данных с дисперсией измерения реального набора данных.
13. Способ по одному из предыдущих пунктов, отличающийся тем, что с экспертной подпрограммой (11) связывают несколько алгоритмов для согласования экспертной геометрии дефекта, включающих машинное обучение, стохастическую оптимизацию, функции эмпирических и/или численных моделей.
14. Способ по п. 13, отличающийся тем, что в экспертной подпрограмме (11) выбирают и/или изменяют алгоритм на основании генерации случайных чисел или посредством функции выделения.
15. Способ определения предела нагрузочной способности объекта, нагружаемого, по меньшей мере в эксплуатации, давлением и выполненного, в частности, в виде нефтяного, газового или водяного трубопровода, при осуществлении которого набор данных, описывающий один или несколько дефектов, используют в качестве входного набора данных при вычислении предела нагрузочной способности, отличающийся тем, что входной набор данных вначале определяют способом по одному из предыдущих пунктов.
| US 2016187523 A1, 30.06.2016 | |||
| US 2013057269 A1, 07.03.2013 | |||
| CN 101688851 A, 31.03.2010 | |||
| US 4694247 A, 15.09.1987 | |||
| Способ определения параметров поверхностного дефекта типа трещины на ферромагнитном объекте | 1989 |
|
SU1777067A1 |
| УСТРОЙСТВО МАГНИТНОГО ДЕФЕКТОСКОПА И СПОСОБ УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕФЕКТОВ ТРУБОПРОВОДА МАГНИТНЫМИ ДЕФЕКТОСКОПАМИ | 2014 |
|
RU2586261C2 |

