Изобретение относится к измерительной технике для настройки бесконтактных датчиков в опрыскивателях сельскохозяйственного назначения.
Известен стенд для исследования крутильных колебаний ротора машины с имитацией их путем углового колебательного воздействия на бесконтактный датчик (RU 154365) (прототип). Недостатком данного стенда, применительно к исследованию процесса опрыскивания, является невозможность срабатывания датчика при различной высоте растительного покрова.
Кроме того известен индикатор (RU 117001), который содержит неподвижный отсчетный индекс визуального съема информации, подвижную ленту-шкалу, на лицевой стороне которой нанесена оцифровка и риски, а на обратной стороне - дорожки кодовой информации, устройство считывания кодовой информации, вычислитель, двигатель, кинематически связанный с лентой-шкалой.
Недостатком индикатора является невозможность срабатывания датчика в зависимости от высоты его положения.
Изобретение имитирует естественные условия работы датчиков в опрыскивателях сельскохозяйственного назначения, определяющих наличие на поле зеленых растений и настройка датчиков по высоте относительно растительного покрова (имитаторов зеленых пучков).
Технический результат достигается за счет изменения высоты расположения датчика относительно платформы и изменения скорости движения платформы с имитаторами зеленного пучка.
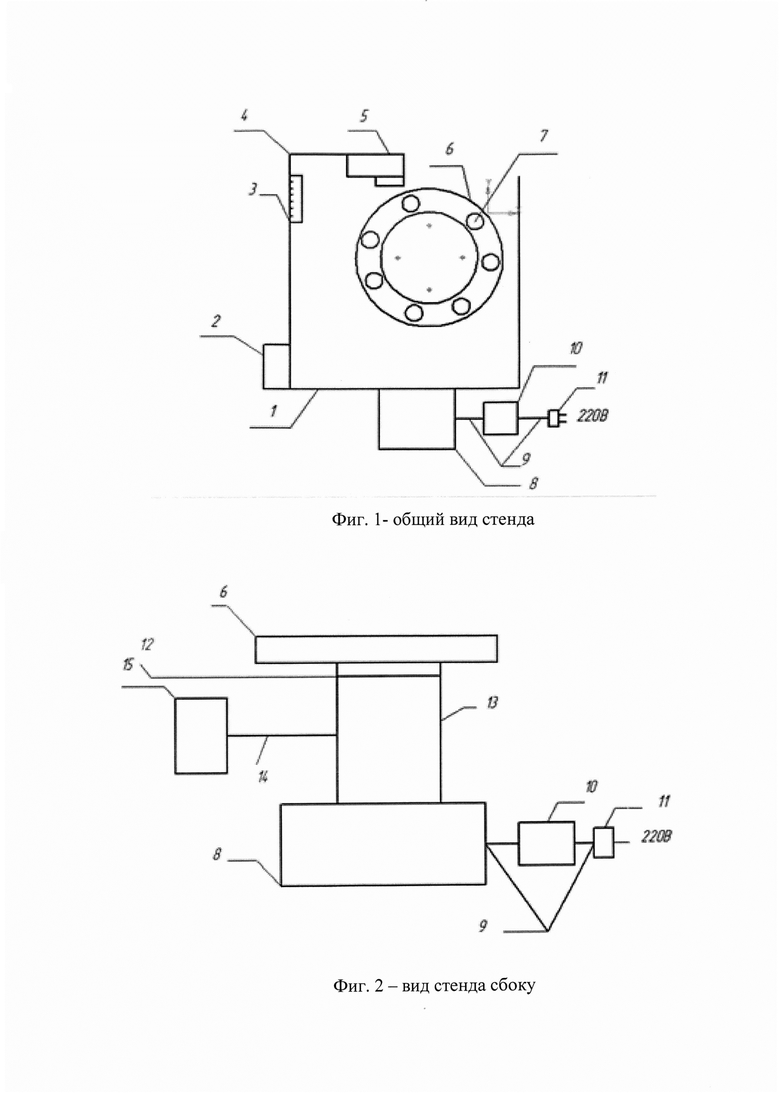
На фиг. 1 представлен общий вид стенда, на фиг. 2 - вид стенда сбоку.
Изобретение включает в себя корпус 1, к которому крепится блок питания 2, и на котором установлена шкала 3. С помощью крепления 4 на шкале 3 устанавливается датчик WeedSeeker 5. На корпусе располагается платформа 6 с имитаторами зеленых пучков 7. Платформу 6 приводит в движение электродвигатель 8, к которому с помощью кабеля 9 подключен частотный преобразователь 10. Частотный преобразователь 10 питается от сети через розетку 11. Платформа 6 крепится с помощью муфты 12 к валу электродвигателя 13. К валу электродвигателя 13 кабелем 14крепится тахометр 15.
Изобретение работает следующим образом.
Датчик WeedSeeker 5, установленный на шкале 3, с помощью крепления 4 излучает луч света направленный на имитацию зеленого пучка 7,закрепленную на платформе 6. При движении платформы 6, встроенные в датчик WeedSeeker 5, светодиоды сканируют поверхность поля в красном и инфракрасном диапазоне. Ширина сканирования одного сенсора, в зависимости от модели, составляет от 30 до 38 см отраженный от поверхности свет улавливается детектором, который находится на центральной части сенсора датчика WeedSeeker5. Электронная часть сенсора анализирует характеристики отраженного света. Если зеленое растение определено, то подается сигнал на форсунку. Определив, что под сенсором находится зеленое растение, в зависимости от настройки скорости, сенсор ожидает, пока форсунка не окажется над растительностью, после чего происходит моментальное опрыскивание. Для настройки высоты расположения датчика WeedSeeker 5 относительно платформы 6, имеется шкала 3.Датчик WeedSeeker 5 перемещается по шкале 3, изменяя высоту относительно платформы 6.
Вид стенда сбоку на фигуре 2.
Платформа 6 посредством муфты 12 крепится к валу электродвигателя 13. Частотный преобразователь 10, необходим для управления моментом на валу электродвигателя 13, питается от сети через розетку 11, регулирует обороты электродвигателя 8, подсоединенного с помощью кабеля 9.
Угловая скорость на валу электродвигателя 13 измеряется, подсоединенным к нему кабелем 14, тахометром 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитационный стенд для настройки бесконтактных датчиков | 2020 |
|
RU2749576C1 |
| СИСТЕМА РАСПОЗНАВАНИЯ ЖИВЫХ РАСТЕНИЙ | 2023 |
|
RU2826165C1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| Система калибровки и тестирования звездного датчика ориентирования | 2023 |
|
RU2811666C1 |
| Устройство для имитации нагрузки приводов раскрытия трансформируемых конструкций космических аппаратов | 2023 |
|
RU2801954C1 |
| Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО | 2022 |
|
RU2799747C1 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| СТЕНД ДЛЯ ТЕПЛОВЫХ ИСПЫТАНИЙ КОСМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2172709C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МЕХАНИЧЕСКОЙ ПРОЧНОСТИ ИЗОЛЯЦИИ ПРОВОДОВ ИЛИ КАБЕЛЕЙ НА ИСТИРАНИЕ | 2010 |
|
RU2422799C1 |
Изобретение относится к метрологии. Стенд для настройки бесконтактных датчиков состоит из корпуса с подвижной платформой, которую приводит в движение электрический двигатель. На платформе установлены имитаторы зеленого пучка и шкала, с помощью которой изменяется высота расположения установленного на ней датчика Weed Seeker. При движении платформы встроенные в датчик Weed Seeker светодиоды сканируют поверхность поля в красном и инфракрасном диапазоне. Ширина сканирования одного сенсора зависит от модели. Отраженный от поверхности свет улавливается детектором, который находится на центральной части сенсора датчика Weed Seeker. Электронная часть сенсора анализирует характеристики отраженного света. Если зеленое растение определено, то подается сигнал на форсунку. Определив, что под сенсором находится зеленое растение. в зависимости от настройки скорости с помощью частотного преобразователя сенсор ожидает, пока форсунка не окажется над растительностью, после чего происходит моментальное опрыскивание. Технический результат - имитация естественных условий работы датчиков. 2 ил.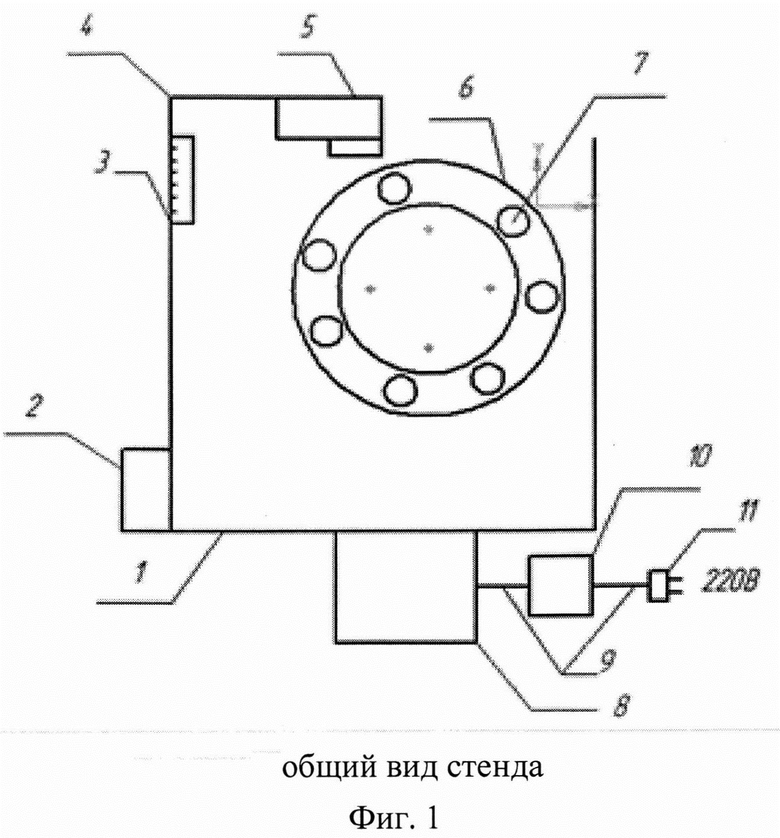
Стенд для настройки бесконтактных датчиков, состоящий из корпуса с движущейся платформой, блоком питания, через который осуществляется подача электроэнергии, в том числе на электродвигатель, приводящий в движение платформу, и закрепленным на шкале датчиком WeedSeeker, который сканирует поверхность поля в красном и инфракрасном диапазоне, ширина сканирования одного сенсора в зависимости от модели составляет от 30 до 38 см, отраженный от поверхности свет улавливается датчиком WeedSeeker, отличающийся тем, что датчик WeedSeeker перемещается по шкале, изменяя высоту относительно платформы с имитаторами зеленых пучков, а электродвигатель с частотным преобразователем позволяет изменять скорость движения платформы.
| CN 0106482694 A, 08.03.2017 | |||
| US 8179533 B2, 15.05.2012 | |||
| WO 2017219072 A1, 28.12.2017 | |||
| US 6021959 A1, 08.02.2000 | |||
| WO 2017178666 A1 A1, 19.10.2017 | |||
| Использование оптических датчиков в борьбе с сорными растениями, 19.06.2017 | |||
| // URL: |

