Изобретение относится к медицине, а именно к травматологии и ортопедии, и может быть использовано для разработки компоновок ортопедического гексапода (на примере аппарата Орто-СУВ), применимого для увеличения амплитуды движений в коленном суставе и устранения его порочных положений.
Из патента РФ 2352283, опубл. 20.04.2009, известен аппарат для чрескостного остеосинтеза Орто-СУВ, т.н гексапод, содержащий два кольца и шесть телескопических штанг (страт), последние соединяют между собой упомянутые кольца. Каждая телескопическая штанга (страта) состоит из кардана, резьбового стержня, гайки, втулки и оси, при этом один конец резьбового стержня соединен с карданом. Другой конец резьбового стержня проходит через втулку и соединяется с ней при помощи вращающейся на ней гайки. К каждой опоре крепятся по три телескопические штанги концами, которые имеют кардан, посредством соединения втулки с карданом соседней телескопической штанги попарно соединяются телескопические штанги, идущие от противоположных колец. При этом втулка соединяется с карданом соседней телескопической штанги при помощи оси с образованием двухосевого шарнира. Известен способ разработки оптимальной компоновки аппарата Орто-СУВ для разработки движений в коленном суставе (Л.Н. Соломин, К.Л. Корчагин. Разработка оптимальной компоновки аппарата Орто-СУВ для разработки движений в коленном суставе. - Травматология и ортопедия России, 2009 - 21-26сс, УДК: 616.728.3-089.84). Согласно данному известному способу, в графический редактор помещают изображение модели коленного сустава и помещают на него изображение аппарата Орто-СУВ, после чего имитируют в графическом редакторе перемещение большеберцовой кости относительно бедренной. После того, как четвёртая и пятая страты (телескопические стержни) гексапода становятся параллельными плоскости проксимального кольца, виртуальное сгибание прекращается, так как механика работы аппарата Орто-СУВ под отрицательным углом страт не позволяет дальнейшее перемещение внешних опор. Разработанные в графическом редакторе компоновки, обеспечивающие максимальную амплитуду движений, апробируют на пластиковых моделях бедренной и большеберцовой костей, и затем по собранным механическим моделям методом множества проб определяют оптимальные компоновки аппарата Орто-СУВ для разработки движений в коленном суставе.
Однако известный способ не обеспечивает возможность исследования конфликта страт аппарата Орто-СУВ с мягкими тканями (касание стратами мягких тканей). Апробация на механических моделях пластиковых костей при данном известном способе предполагается без моделирования мягкотканного компонента и в результате реально обеспечиваемая амплитуда может оказаться на порядок ниже заявленной. При этом, как будет понятно специалисту, физиологические параметры пациентов определяются не только параметрами костей, но и параметрами мягких тканей пациента.
Кроме этого, при использовании механического моделирования данным известным способом существует необходимость для каждой исследуемой компоновки многократно перепроводить чрескостные элементы для фиксации чрескостных модулей, что неудобно, трудоемко, а также способствует разрушению механической модели костей.
Задача настоящего изобретения состоит в создании способа и устройства для разработки оптимальных компоновок ортопедического гексапода на примере аппарата Орто-СУВ, лишенного, по меньшей мере, некоторых приведенных выше недостатков.
Технический результат изобретения состоит в обеспечении возможности получения точных сведений о максимально возможной амплитуде движения в коленном суставе и определения наилучшей (оптимальной) компоновки аппарата внешней фиксации для конкретного пациента за счет исключения нежелательно контакта элементов гексапода с мягкими тканями бедра и голени пациента при сгибании в пределах 120° (от 0° до 120°), а также упрощения и облегчения процедуры перемонтажа аппарата для определения оптимальных компоновок ортопедического гексапода, что в целом обеспечивает повышение качества лечения пациентов с использованием аппаратов наружной чрескостной фиксации для устранения порочных положений коленного сустава и контрактур.
Первым объектом настоящего изобретения является устройство для разработки оптимальных компоновок ортопедического гексапода, применяемого для разработки движений при контрактурах коленного сустава. Устройство представляет собой искусственную модель конечности, включающую модели бедренной и большеберцовой костей, шарнирно соединенных между собой с образованием модели коленного сустава, модель конечности дополнительно включает расположенные на соответствующих моделях бедренной и большеберцовой костей модель мягких тканей бедра и модель мягких тканей голени, каждая из которых разделена на восемь уровней, согласно методу унифицированного обозначения чрескостного остеосинтеза (далее МУОЧО) (Метод унифицированного обозначения чрескостного остеосинтеза длинных костей: метод, рекомендации №2002/134/сост.: Л.Н. Соломин [и др.]. - СПб., 2004. - 21 с.).
Возможен вариант осуществления, согласно которому модели бедренной кости и большеберцовой кости выполнены из одного или нескольких материалов, выбранных из: пластик, гипс, металл, резина.
Возможен вариант осуществления, согласно которому модели мягких тканей бедра и мягких тканей голени выполнены из одного или нескольких материалов, выбранных из: пенополиуретан, резина.
Возможен вариант осуществления, согласно которому модель мягких тканей бедра и/или модель мягких тканей голени выполнена составной и разделена на несколько частей, имеющих различные длины окружностей.
Еще одним объектом настоящего изобретения является способ разработки оптимальных компоновок ортопедического гексапода, применяемого для разработки движений при контрактурах коленного сустава, осуществляемый на заявляемом устройстве для разработки оптимальных компоновок ортопедического гексапода, а также посредством гексапода, включающего набор статических модулей, мобильных модулей, телескопических стоек и чрескостных элементов, способ включает следующие этапы:
- определяют индивидуальные параметры конечности пациента, включающие, по меньшей мере, длины бедра и голени, а также длины окружностей бедра и голени по меньшей мере в трех частях для каждой;
- по полученным индивидуальным параметрам конечности пациента изготавливают или подбирают предварительно изготовленную соответствующую по размерам искусственную модель конечности пациента (первый объект изобретения);
- идентифицируют по восемь уровней для сегмента бедра и сегмента голени на искусственной модели конечности пациента согласно методу унифицированного обозначения чрескостного остеосинтеза;
- в проксимальном отделе сегмента бедра, на уровнях I-II, и на дистальном отделе сегмента голени, на уровнях VI-VII, накладывают статические модули и фиксируют их на искусственной модели конечности пациента посредством чрескостных элементов;
- к статическим модулям посредством телескопических стоек фиксируют соответствующие мобильные модули, которые при изменении длин телескопических стоек выполнены с возможностью изменения угла наклона и перемещения вдоль уровней сегмента голени и сегмента бедра соответственно;
- мобильный модуль сегмента бедра и мобильный модуль сегмента голени соединяют между собой шестью телескопическими стойками с образованием гексапода в области коленного сустава на искусственной модели конечности пациента;
- телескопические стойки переводят в режим «быстрых страт», при котором длина каждой из телескопических стоек не фиксирована и мобильные модули выполнены с возможностью свободного линейного перемещения и поворота на заданный угол друг относительно друга;
- задают исходное положение каждого из мобильных модулей посредством свободного перемещения мобильных модулей и изменения длин телескопических стоек, затем выполняют сгибание коленного сустава искусственной модели конечности пациента до касания по меньшей мере одной из телескопических стоек гексапода мягких тканей искусственной модели конечности пациента, после чего регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек до мягких тканей искусственной модели конечности пациента;
- выполняют перемонтаж гексапода посредством введения дополнительных элементов конструкции аппарата, обеспечивающих увеличение расстояния между телескопическими стойками и мягкими тканями искусственной модели конечности пациента, затем повторно регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек до мягких тканей искусственной модели конечности пациента; перемонтаж выполняют до получения оптимальной компоновки ортопедического гексапода, обеспечивающей исключение контакта элементов гексапода с мягкими тканями искусственной модели конечности пациента при сгибании в пределах амплитуды от 0° до 120°;
- регистрируют оптимальную компоновку ортопедического гексапода для индивидуальных параметров конечности пациента.
Фиг. 1: Фотография: Отмоделированная по замерам бедра и голени нижняя конечность с отмеченными VIII уровнями по МУОЧО.
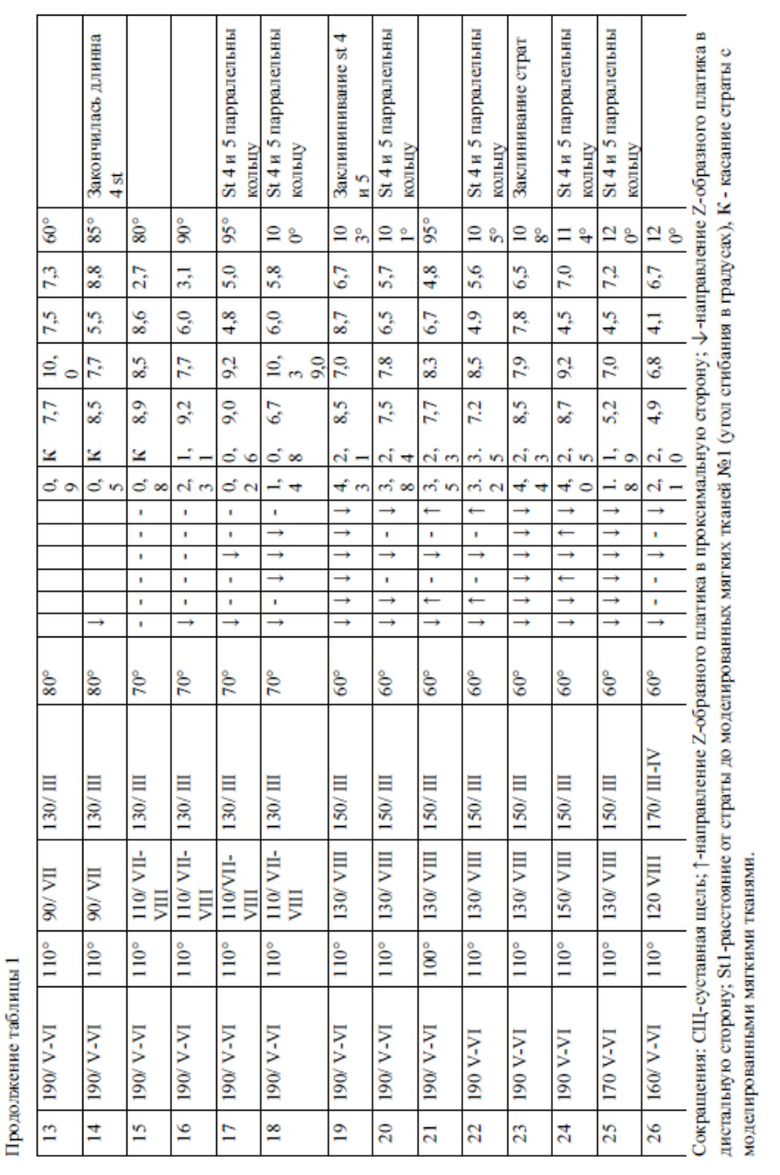
Фиг. 2: Фотография: Установленные на модели статические, мобильные опоры и гексапод Орто-СУВ.
Фиг. 3: Фотография: Изначальная компоновка (нулевое положение).
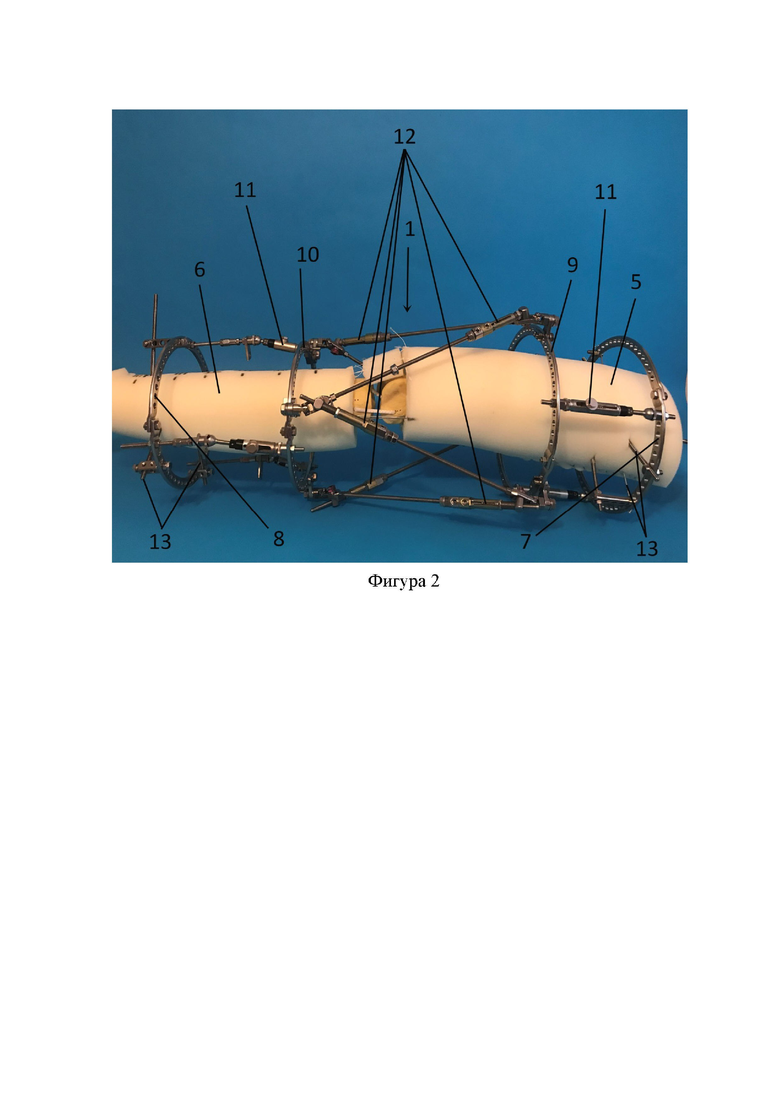
Фиг. 4: Фотография: Изначальная компоновка (максимальная амплитуда).
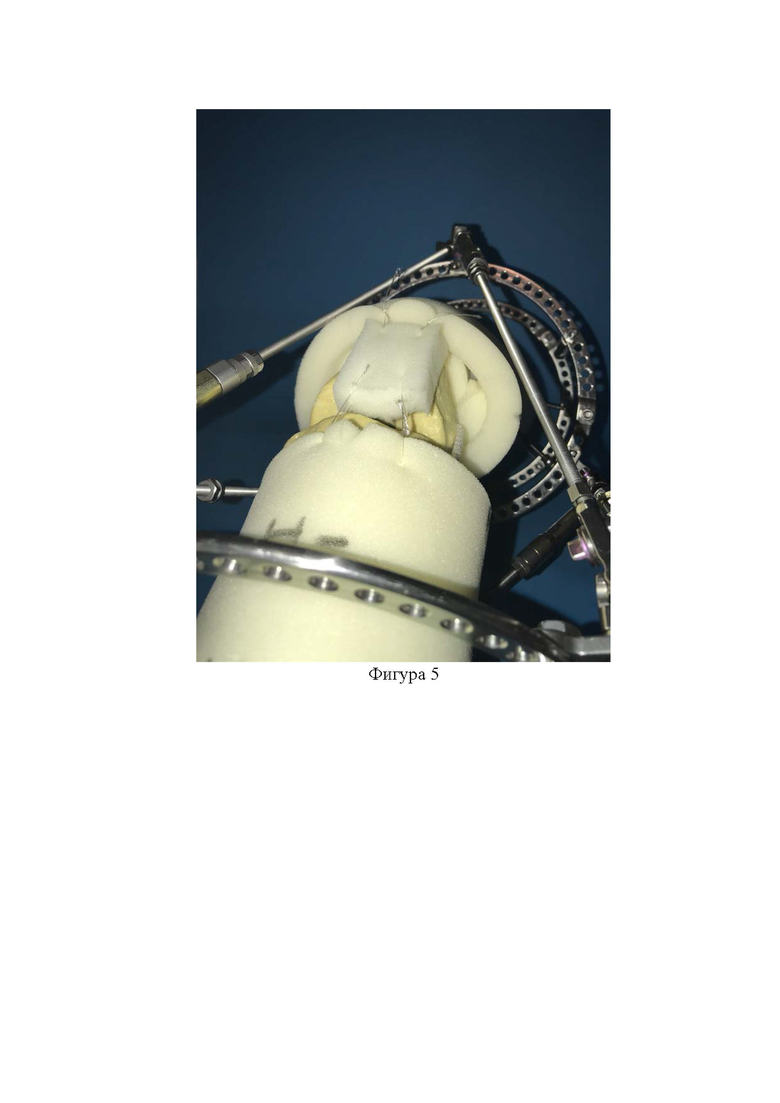
Фиг. 5: Фотография: Изначальная компоновка (касание первой страты с мягкими тканями).
Фиг. 6: Фотография: Пример той же компоновки с применением Z-образного платика (максимальная амплитуда).
Фиг. 7: Фотография: Пример той же компоновки с применением Z-образного платика (касание первой страты с мягкими тканями).
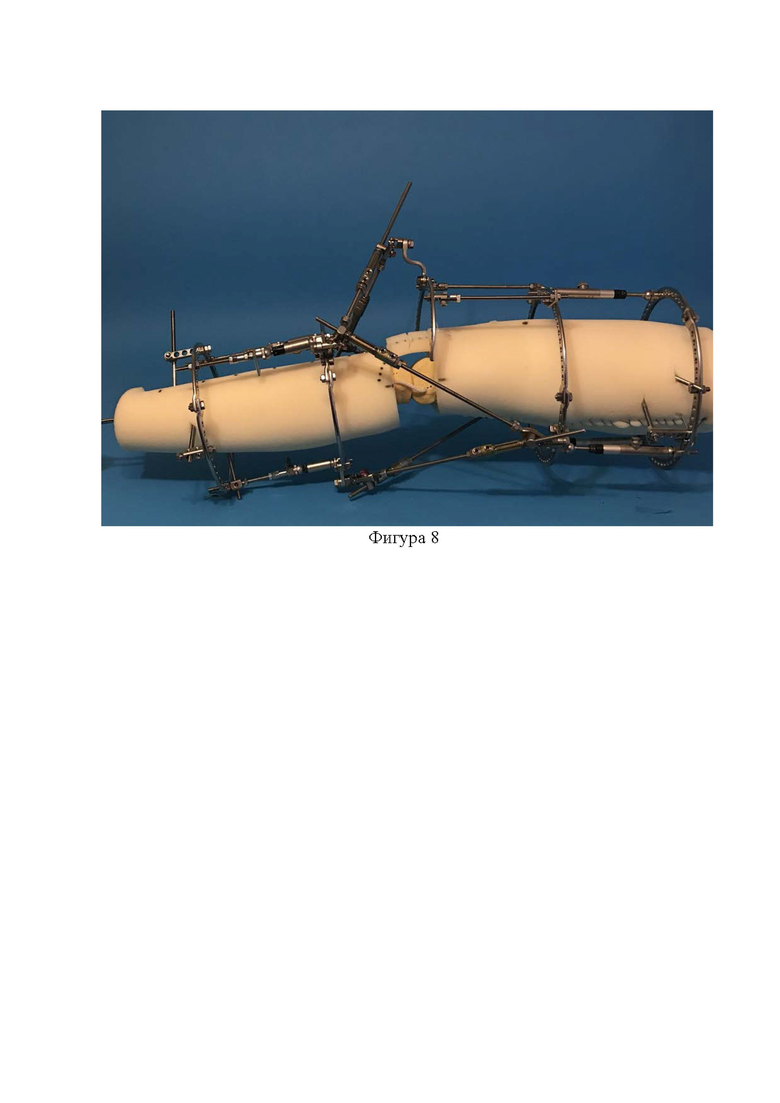
Фиг. 8: Фотография: Пример компоновки с использованием свободной секторной опоры (нулевое положение).
Фиг. 9: Фотография: Пример компоновки с использованием свободной секторной опоры (максимальное сгибание без контакта страт с мягкими тканями).
Фиг. 10: Фотография: Пример компоновки с использованием свободной секторной опоры (конец длинны четвёртой страты).
Фиг. 11: Фотография: Пример компоновки с изменением расстояния свободного сектора и изменением угла наклона опор (нулевое положение)
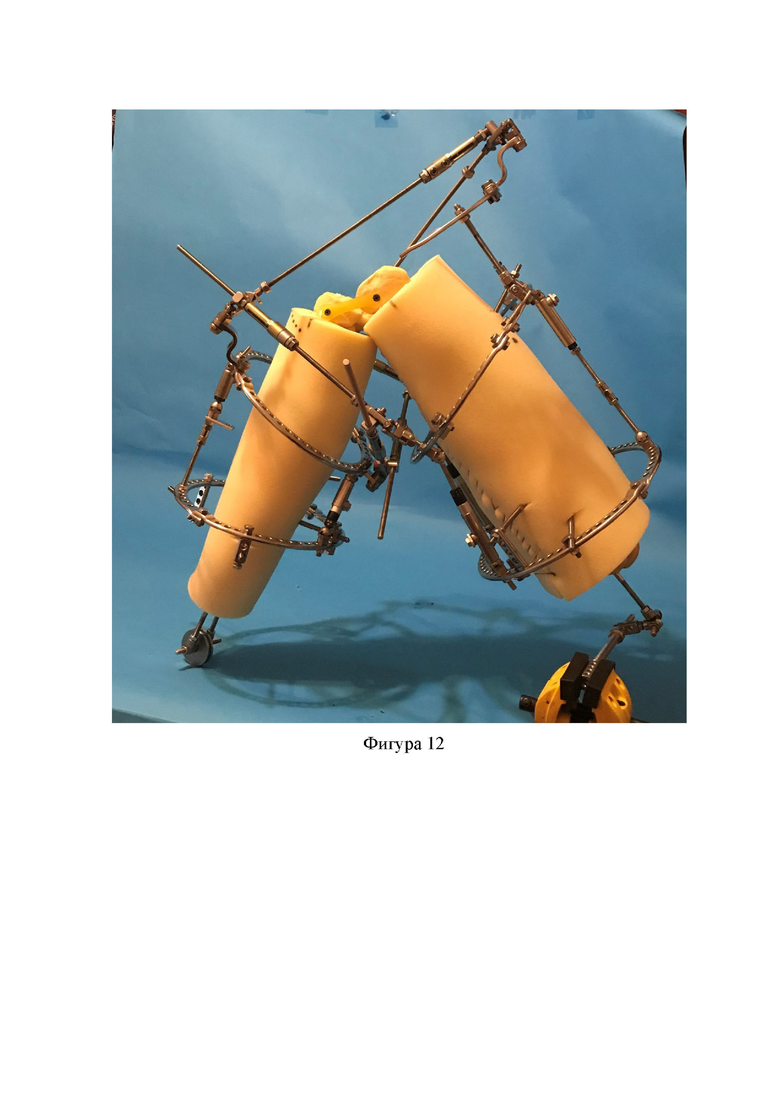
Фиг. 12: Фотография: Пример компоновки с изменением расстояния свободного сектора и угла наклона опор (отсутствие контакта страт с мягкими тканями максимальном сгибании).
Фиг. 13: Фоторентгенограмма коленного сустава пациента после наложения дистракционно-фиксационного аппарата.
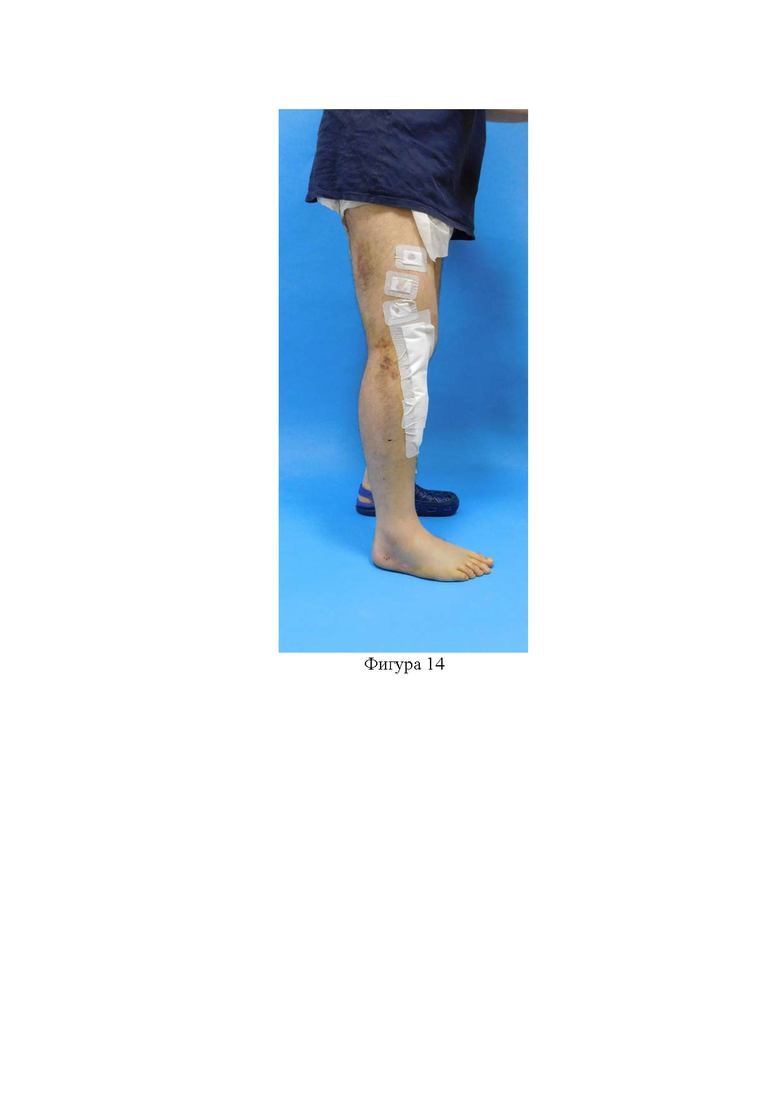
Фиг. 14: Фотография пациента до наложения аппарата внешней фиксации и ортопедического гексапода Орто-СУВ (нулевое положение).
Фиг. 15: Фотография пациента до наложения аппарата внешней фиксации и ортопедического гексапода Орто-СУВ (угол максимального сгибания в коленном суставе 35°).
Фиг. 16: Фоторентгенограмма коленного сустава пациента после наложения гексапода Орто-СУВ: прямая проекция.
Фиг. 17. Фоторентгенограмма коленного сустава пациента после монтажа гексапода Орто-СУВ: боковая проекция.
Фиг. 18. Фотография пациента после монтажа гексапода Орто-СУВ.
Фиг. 19. Фотография пациента в процессе лечения.
Фиг. 20. Фотография пациента после снятия аппарата внешней фиксации (нулевое положение).
Фиг. 21. Фотография пациента после снятия аппарата внешней фиксации (угол сгибания в коленном суставе 120°).
Способ реализуют посредством искусственной модели конечности 1 (Фиг. 1), включающей модели бедренной 2 и большеберцовой 3 костей, шарнирно соединенных между собой с образованием модели коленного сустава 4. Модель конечности 1 дополнительно включает модель мягких тканей бедра 5 и модель мягких тканей голени 6, каждая из которых разделена на восемь уровней, согласно методу унифицированного обозначения чрескостного остеосинтеза (МУОЧО). Разделение на уровни, например, может представлять собой графическую индикацию на поверхности моделей мягких тканей бедра 5 и голени 6 как показано в иллюстративном примере на Фиг. 1. Как будет понятно специалисту, возможны и иные варианты индикации для четкого визуального разделения каждой из моделей мягких тканей бедра 5 и голени 6 на восемь уровней.
Модели бедренной кости 2 и большеберцовой кости 3 могут быть выполнены, например, из пластика, гипса, металла, резины и/или иного твердого материала, имитирующего кости человека. Соединение модели бедренной кости 2 и модели большеберцовой кости 3 с образованием модели коленного сустава 4 может быть выполнено, например посредством протягивания веревки через отверстия, выполненные в концах модели бедренной кости 2 и модели большеберцовой кости 3 как показано на фиг. 1. Альтернативно или дополнительно могут быть использованы и иные средства крепления, обеспечивающие соединение концов модели бедренной кости 2 и модели большеберцовой кости 3 с образованием их шарнирного соединения с образованием модели коленного сустава 4. Модели мягких тканей бедра 5 и мягких тканей голени 6 могут быть выполнены, например, из пенополиуретана, резины или иных мягких и/или пластичных материалов, выполненных с возможностью имитации мягких тканей человека.
Помимо модели конечности, описанной выше, заявляемый способ также реализуется посредством стандартных элементов аппарата (гексапода) Орто-СУВ, включающих базовую 9 и перемещаемую 10 опору, шесть последовательно соединенных между собой телескопических штанг 12 (страт) фиксированных к опорам в трех точках при помощи платиков. Возможен вариант компоновки аппарата из трех или четырех опор, когда имеется одна или две стабилизирующие опоры. При этом принцип работы аппарата остается прежним, два модуля гексапода фиксирующие проксимальный и дистальный фрагмент, соединены между собой шестью стратами. Фиксация страт может осуществляться не только к базовой и перемещаемой опоре, но и к стабилизирующим опорам. При этом имеется два варианта фиксации страт к опорам, с использованием прямых и Z-образных платиков.
На Фиг. 2 показан неограничивающий иллюстративный пример установки элементов известного чрескостного аппарата «Орто-СУВ» на искусственную модель конечности 1 согласно заявляемому изобретению, при этом приведены следующие ссылочные обозначения:
7 - проксимальный статический модуль (опорное бедренное кольцо);
8 - дистальный статический модуль (опорное кольцо голени);
9 - базовая опора аппарата Орто-СУВ (мобильный модуль бедра);
10 - перемещаемая опора аппарата Орто-СУВ (мобильный модуль голени);
11 - телескопические стойки (телескопические штанги или винтовые стойки Илизарова);
12 - шесть телескопических стоек (страт аппарата Орто-СУВ);
13 - чрескостные элементы (спицы, стержни-шурупы).
Далее со ссылками на фиг. 1-21 будут подробнее описаны этапы заявляемого способа.
На первом этапе определяют индивидуальные параметры конечности пациента, включающие, по меньшей мере, длины бедра и голени, а также длины окружностей бедра и голени по меньшей мере на трех уровнях для каждой.
В общем случае производят замеры длин голени и бедра пациента, а также длины окружностей бедра пациента в трех частях: верхняя, средняя и нижняя треть, и длины окружностей голени пациента в трех частях: верхняя, средняя и нижняя треть.
Возможен вариант осуществления, согласно которому длины окружностей бедра и/или голени измеряют в большем количестве частей, например, четырех, пяти, шести, семи, восьми, девяти, десяти и т.д. Это может быть актуально для случаев наличия у пациента, например, отеков, новообразований, а также иных физиологических особенностей, способствующих отклонению форм бедра и/или голени от стандартной формы (обычного строения). Как будет понятно специалисту, определение длин окружностей бедра и/или голени в большем количестве частей обеспечивает возможность повышения точности моделирования.
На втором этапе по полученным индивидуальным параметрам конечности пациента изготавливают или подбирают предварительно изготовленную искусственную модель конечности пациента 1 (Фиг. 1), включающую модели бедренной 2 и большеберцовой 3 костей, шарнирно соединенных между собой с образованием модели коленного сустава 4. Модель конечности 1 дополнительно включает модель мягких тканей бедра 5 и модель мягких тканей голени 6, каждая из которых разделена на восемь уровней, согласно методу унифицированного обозначения чрескостного остеосинтеза (МУОЧО).
Искусственная модель конечности пациента 1 может изготавливаться полностью или частично, отдельные элементы искусственной модели или искусственные модели конечностей целиком под различные возможные параметры конечностей пациентов могут быть изготовлены заранее. Например, могут быть предварительно изготовлены модели бедренной 2 и большеберцовой 3 костей различных размеров, шарнирно соединенные между собой с образованием модели коленного сустава 4. И отдельно могут быть изготовлены модели мягких тканей бедра 5 и модель мягких тканей голени 6 также различных размеров для возможности подбора с учетом индивидуальных параметров пациента, полученных на первом этапе способа. Предварительно изготовленные модели мягких тканей могут представлять собой единое целое или несколько частей, например, по три или больше частей для каждой из частей бедра и/или голени. Таким образом, например, может быть отдельно подобрана модель верхней части мягких тканей, модель средней части мягких тканей и модель нижней части мягких тканей, с учетом полученных на первом этапе длин окружностей соответствующих частей конечности пациента.
Объединение выбранных предварительно изготовленных моделей костей и моделей мягких тканей обеспечивает возможность оперативного создания искусственной модели конечности пациента 1, соответствующей индивидуальным параметрам конечности пациента, полученным на первом этапе заявляемого способа.
Также возможен вариант создания индивидуальной искусственной модели конечности 1, соответствующей индивидуальным параметрам конкретного пациента.
На третьем этапе идентифицируют по восемь уровней (I, II, III, IV, V, VI, VII, VIII) для сегмента бедра (модели мягких тканей бедра 5) и сегмента голени (модели мягких тканей голени 6) на искусственной модели конечности пациента, согласно методу унифицированного обозначения чрескостного остеосинтеза (МУОЧО) (Фиг. 1).
Идентификация уровней может осуществляться как по предварительно нанесенным индикаторам на моделях мягких тканей бедра 5 и голени 6 (сверка и корректировка при необходимости), либо идентификация на третьем этапе может включать в себя нанесение визуальных индикаторов, если ранее они не были нанесены на искусственной модели конечности или отдельных ее элементах.
На четвертом этапе в проксимальном отделе сегмента бедра (уровни I-II) модели накладывают статический проксимальный модуль (опорное бедренное кольцо 7) прочно фиксированный чрескостными элементами (спицами, стержнями-шурупами 13) к искусственной модели конечности пациента (фиг. 2). Аналогичным образом на дистальный отдел (уровни VI-VII) сегмента голени накладывают дистальный статический модуль (опорное кольцо голени 8) прочно фиксированный чрескостными элементами (спицами, стержнями-шурупами 13) к искусственной модели конечности пациента (фиг. 2).
На пятом этапе к статическим модулям (опорные кольца 7, 8), при помощи телескопических стоек 11 фиксируют мобильные модули 9, 10 (базовая и перемещаемая опоры аппарата Орто-СУВ), свободные от чрескостных элементов. Например, как показано на фиг. 2, мобильные модули 9, 10 могут представлять собой подвижные опорные кольца, которые посредством трех телескопических стоек 11 (телескопических шарнирных штанг или резьбовых штанг с шарнирами Илизарова), фиксируют к соответствующим статическим модулям 7, 8 на сегменте бедра и голени соответственно. Причем мобильные модули 9, 10 не фиксированы чрескостными элементами к искусственной модели конечности пациента 1 и выполнены с возможностью перемещения вдоль уровней III-VII сегмента бедра и уровней I-VI сегмента голени, соответственно посредством изменения длин телескопических стоек 9 между статическими модулями 7, 8 и мобильными модулями 9, 10. Кроме того, посредством изменения длин телескопических стоек 11 между статическими модулями 7, 8 и мобильными модулями 9, 10 обеспечивается возможность изменения углов наклона мобильных модулей 9, 10.
Такая фиксация с применением телескопических стоек 11 позволяет регулировать расстояние от уровня коленного сустава на искусственной модели конечности пациента 1 и угол наклона мобильных модулей 9, 10.
На шестом этапе мобильный модуль 9 сегмента бедра и мобильный модуль 10 сегмента голени соединяют между собой шестью телескопическими стойками 12 с образованием гексапода (например, аппарат Орто-СУВ) в области коленного сустава на искусственной модели конечности пациента 1. Модификации и конструкции телескопических стоек между мобильными модулями и телескопических стоек между мобильным модулем и статическим модулем могут, по меньшей мере, частично совпадать или отличаться.
На седьмом этапе для определения оптимальной компоновки ортопедического гексапода, все телескопические стойки переводят в режим «быстрых страт», при котором длина каждой из телескопических стоек не фиксирована и мобильные модули 9, 10 выполнены с возможностью свободного линейного перемещения и поворота на заданный угол относительно оси сегмента. Под термином все телескопические стойки 11, 12 понимаются упомянутые выше шесть телескопических стоек 12 гексапода, соединяющие мобильные модули 9, 10 между собой, а также телескопические стойки 11, соединяющие мобильный модуль 9 сегмента бедра со статическим модулем 7 сегмента бедра, и телескопические стойки 11, соединяющие мобильный модуль 10 сегмента голени со статическим модулем 8 сегмента голени. Таким образом обеспечивается возможность свободного линейного перемещения мобильных модулей 9, 10 на необходимое расстояние и изменение угла наклона каждого из мобильных модулей 9, 10.
На восьмом этапе посредством свободного перемещения мобильных модулей и изменения длин телескопических стоек 11 задают исходное положение каждого из мобильных модулей 9, 10. Исходное положение включает параметры расстояния между мобильными модулями 9, 10 и суставной щелью коленного сустава, а также углы наклона мобильных модулей относительно оси сегмента. Далее выполняют сгибание коленного сустава искусственной модели конечности пациента 1 до касания по меньшей мере одной из телескопических стоек 12 гексапода мягких тканей искусственной модели конечности пациента 1 (Фиг. 5, 7). Амплитуду сгибания, при которой произошло касание и расстояние от мягких тканей до каждой из страт, регистрируют.
На девятом этапе выполняют перемонтаж гексапода посредством введения дополнительных элементов конструкции ортопедического гексапода, обеспечивающих увеличение расстояния между телескопическими стойками 12 гексапода и мягкими тканями искусственной модели конечности пациента 1, затем повторно регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек 12 до мягких тканей искусственной модели конечности пациента 1. Перемонтаж выполняют до получения оптимальной компоновки ортопедического гексапода, обеспечивающей исключение контакта элементов гексапода с мягкими тканями искусственной модели конечности пациента при сгибании в коленном суставе 4 в пределах амплитуды от 0° до 120°.
В качестве дополнительных элементов конструкции ортопедического гексапода, обеспечивающих возможность увеличения амплитуды движений в коленном суставе могут быть использованы Z-образные платики для соединения телескопической стойки 11 с мобильным модулем 8, 9. В случае если произошло касание мягких тканей по меньшей мере одной телескопической стойки 12 или иных элементов (в том числе введенных дополнительных элементов конструкции ортопедического гексапода), а необходимая амплитуда движений не была достигнута, изменяют расстояние мобильных модулей 9, 10 добавляют свободный бедренный сектор, увеличивают угол наклона мобильных модулей 9, 10 и т.д. Процедуру регистрации данных повторяют при каждой новой компоновке. Приведенные выше варианты перемонтажа являются иллюстративными неограничивающими примерами.
Стоит отметить, что при перемонтаже гексапода не требуется перепроведение чрескостных элементов 13, поскольку они фиксируют только статические модули 7 и следовательно никак не ограничивают изменение положений мобильных модулей 9, 10 и телескопических стоек 12 гексапода. Таким образом, облегчается процедура перемонтажа и исключается износ искусственной модели конечности пациента при проверке множества возможных компоновок гексапода до нахождения оптимальной.
На десятом этапе регистрируют оптимальную компоновку ортопедического гексапода для индивидуальных параметров конечности пациента (конкретного пациента), которые были определены на первом этапе способа.
Сравнение вариантов компоновок позволяет получить точные сведения о максимально возможной амплитуде движения в коленном суставе и определить наилучшую (оптимальную) компоновку для конкретного пациента. Эти сведения имеют важное прикладное значение, так как направлены на повышение качества лечения пациентов с использованием аппаратов наружной чрескостной фиксации для устранения порочных положений коленного сустава и контрактур.
В качестве примера клинического использования показано определение оптимальной компоновки для пациента Г., 35 лет с диагнозом: разгибательная контрактура правого коленного сустава, состояние после металлостеосинтеза оскольчатого внутрисуставного перелома проксимального отдела правой большеберцовой кости. Из анамнеза: травма 15 октября 2019 года в результате падения с мопеда получил оскольчатый внутрисуставной перелом проксимального отдела правой большеберцовой кости. При поступлении в приемном отделении наложен дистракционно-фиксационный аппарат внешней фиксации на коленный сустав (Фиг. 13). 22.10.20 г. выполнен металлостеосинтез перелома проксимального отдела правой большеберцовой кости тремя пластинами, демонтаж дистракционно-фиксационного аппарата внешней фиксации. После операции пациент стал отмечать, что не может согнуть правый коленный сустав, сформировалась контрактура правого коленного сустава 35°/0°/0° (Фиг. 14, Фиг. 15). Было принято решение о разработке движений в правом коленном суставе с использованием ортопедического гексапода.
Данному пациенту были произведены замеры длины и окружности бедра и голени. Длина бедра составила 43 см, окружность в/3 - 52 см, с/3 - 46 см, н/3 - 40 см. Длина голени была равной 38,5 см, окружности в/3 - 36 см, с/3 - 39 см, н/3 - 23 см. С целью определения оптимальной компоновки для данного пациента, по замерам длины и окружности бедра и голени, на пластиковых костях были смоделированы мягкие ткани с отмеченными 8 уровнями по МУОЧО (Фиг. 1).
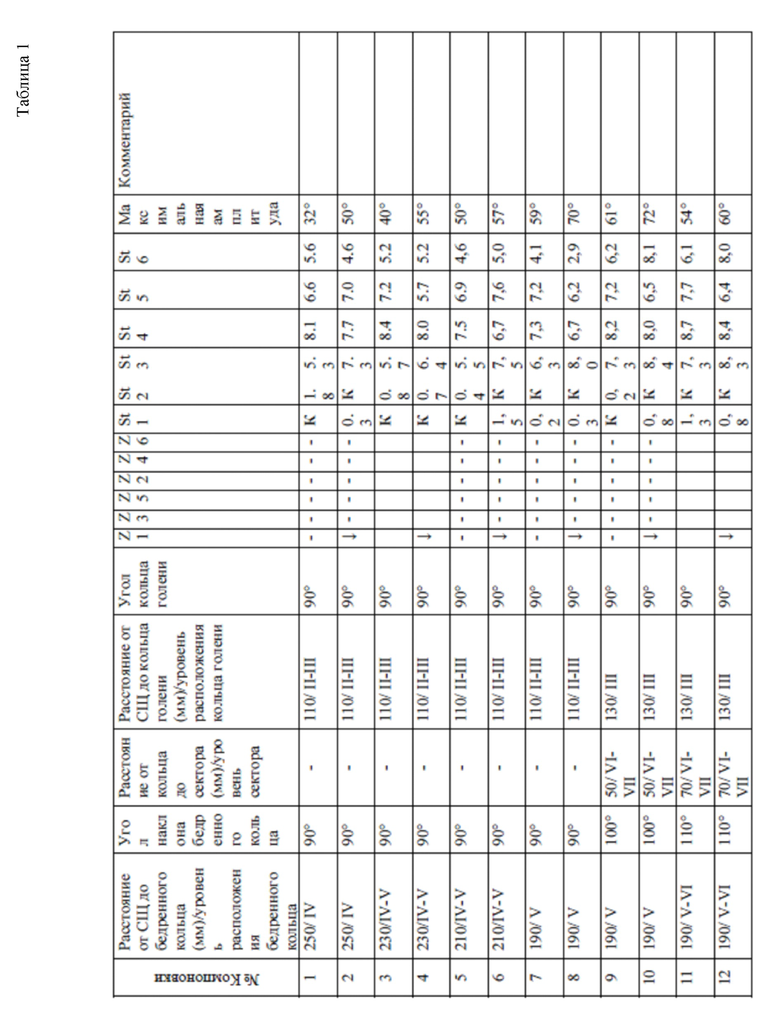
Изначально компоновка аппарата включала (Фиг. 3): расположение базовой опоры аппарата Орто-СУВ (мобильного модуля бедра 9) от суставной щели на расстоянии - 230 мм (уровни IV-V), угол наклона опоры - 90°, расположение перемещаемой опоры (мобильного модуля голени 10) на расстоянии - 110 мм от сустава (уровни II - III), угол наклона кольца 90°, при фиксации телескопических стоек 11 гексапода к базовой 9 и перемещаемой 10 опоре (мобильным модулям 8, 9) использовали прямые платики (Фиг. 4). Выяснено, что при этой компоновке достигнув амплитуды сгибания 40° первая страта (телескопическая стойка 12) касается мягких тканей (Фиг. 5). Замена прямого платика на Z-образный в точке крепления первой страты (Фиг. 6) увеличивает амплитуду сгибания до 55° после чего 1-страта касается мягких тканей (Фиг. 7). Дополнительно прикрепив к базовой опоре аппарата Орто-СУВ 9 «свободную» (без чрескостных элементов) секторную опору (Фиг. 8) на расстоянии 165 мм (уровень VIII) удалось увеличить амплитуду до 90° без касания страт (телескопических стоек 12) с мягкими тканями, однако при данной амплитуде заканчивается длина четвертой страты (Фиг. 10). При расположении базовой опоры (мобильного модуля бедра 9) на расстоянии 160 мм (уровни V-VI) и под углом 110°, перемещаемой опоры (мобильного модуля голени 10) на расстоянии 170 мм (уровень III-IV) под углом 60°, свободного бедренного сектора на расстоянии 120 мм (VIII) и установке Z-образных платиков в точке крепления первой, второй и шестой страт (Фиг. 11) достигнуто сгибание до угла 120° без касания страт (телескопических стоек 12) с мягкими тканями (Фиг. 12).
Данные каждой компоновки были внесены в таблицу для сравнения различных вариантов и определения оптимальной для данного пациента (Таблица 1). Определив оптимальную компоновку (Фиг. 11, 12), 28.10.20 г. выполнена операция наложение аппарата внешней фиксации на правый коленный сустав, монтаж ортопедического гексапода Орто-СУВ (Фиг. 16, 17, 18, 19). На следующий день начата разработка движений в правом коленном суставе. Было проведено пять полных циклов от полного разгибания до угла сгибания 120°. Аппарат внешней фиксации демонтирован 03.11.20 г. Таким образом, была достигнута амплитуда движений в коленном суставе 120°/0°/0° (Фиг. 20, 21).
Ниже представлена Таблица 1. компоновок аппарата Орто-СУВ, полученная по результатам применения заявленного способа для сравнения различных вариантов и определения оптимальной компоновки ортопедического гексапода для рассматриваемого пациента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ Орто-СУВ ДЛЯ ЛЕЧЕНИЯ ПОВРЕЖДЕНИЙ ДИСТАЛЬНОЙ ТРЕТИ БЕДРЕННОЙ КОСТИ | 2010 |
|
RU2448663C1 |
| Способ коррекции многоуровневых деформаций длинных костей | 2016 |
|
RU2640999C2 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ SUV-Frame ПРИ КОНТРАКТУРАХ КОЛЕННОГО СУСТАВА | 2010 |
|
RU2440058C2 |
| СПОСОБ КОРРЕКЦИИ МНОГОВЕРШИННЫХ ДЕФОРМАЦИЙ ДЛИННЫХ КОСТЕЙ | 2024 |
|
RU2839808C1 |
| СПОСОБ КОРРЕКЦИИ ДЕФОРМАЦИИ КОЛЕННОГО СУСТАВА ПРИ ТОТАЛЬНОМ ДЕФЕКТЕ ОДНОГО ИЗ МЫЩЕЛКОВ БЕДРА У ПОДРОСТКОВ | 2003 |
|
RU2288660C2 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ПРИ ДЕФОРМАЦИЯХ СРЕДНЕГО ОТДЕЛА СТОПЫ | 2011 |
|
RU2489106C2 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ Орто-СУВ ПРИ ЛЕЧЕНИИ ПОВРЕЖДЕНИЙ ПРОКСИМАЛЬНОЙ ТРЕТИ БЕДРЕННОЙ КОСТИ | 2011 |
|
RU2471447C1 |
| СПОСОБ УДЛИНЕНИЯ БЕДРЕННОЙ КОСТИ ПОВЕРХ ИНТРАМЕДУЛЛЯРНОГО СТЕРЖНЯ | 2016 |
|
RU2638279C1 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ПРИ ДЕФОРМАЦИЯХ ЗАДНЕГО ОТДЕЛА СТОПЫ | 2015 |
|
RU2578841C1 |
| СПОСОБ ОСТЕОСИНТЕЗА АППАРАТОМ ОРТО-СУВ ДЛЯ УСТРАНЕНИЯ ВЫВИХОВ В ГОЛЕНОСТОПНОМ СУСТАВЕ | 2013 |
|
RU2547798C1 |












Группа изобретений относится к медицине. Искусственная модель конечности включает модели бедренной и большеберцовой костей, шарнирно соединенных между собой с образованием модели коленного сустава. Модель конечности дополнительно включает расположенные на соответствующих моделях бедренной и большеберцовой костей модель мягких тканей бедра и модель мягких тканей голени, каждая из которых разделена на восемь уровней, согласно методу унифицированного обозначения чрескостного остеосинтеза. Модель имеет индивидуальные параметры конечности пациента, включающие, по меньшей мере, длины бедра и голени, а также длины окружностей бедра и голени по меньшей мере в трех частях для каждой. Способ определения оптимальных компоновок ортопедического гексапода, применяемого для разработки движений при контрактурах коленного сустава, осуществляемый на вышеуказанной модели посредством ортопедического гексапода, включающего набор статических модулей, мобильных модулей, телескопических стоек и чрескостных элементов. Способ включает следующие этапы: определяют индивидуальные параметры конечности пациента, включающие, по меньшей мере, длины бедра и голени, а также длины окружностей бедра и голени по меньшей мере в трех частях для каждой; - по полученным индивидуальным параметрам конечности пациента изготавливают или подбирают предварительно изготовленную вышеуказанную соответствующую по размерам искусственную модель конечности пациента; идентифицируют по восемь уровней для сегмента бедра и сегмента голени на искусственной модели конечности пациента согласно методу унифицированного обозначения чрескостного остеосинтеза; в проксимальном отделе сегмента бедра, на уровнях I-II, и на дистальном отделе сегмента голени, на уровнях VI-VII, накладывают статические модули и фиксируют их на искусственной модели конечности пациента посредством чрескостных элементов; к статическим модулям посредством телескопических стоек фиксируют соответствующие мобильные модули, которые при изменении длин телескопических стоек выполнены с возможностью изменения угла наклона и перемещения вдоль уровней сегмента голени и сегмента бедра соответственно; мобильный модуль сегмента бедра и мобильный модуль сегмента голени соединяют между собой шестью телескопическими стойками с образованием гексапода в области коленного сустава на искусственной модели конечности пациента; телескопические стойки переводят в режим, при котором длина каждой из телескопических стоек не фиксирована и мобильные модули выполнены с возможностью свободного линейного перемещения и поворота на заданный угол друг относительно друга; задают исходное положение каждого из мобильных модулей посредством свободного перемещения мобильных модулей и изменения длин телескопических стоек, затем выполняют сгибание коленного сустава искусственной модели конечности пациента до касания по меньшей мере одной из телескопических стоек гексапода мягких тканей искусственной модели конечности пациента, после чего регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек до мягких тканей искусственной модели конечности пациента; выполняют перемонтаж гексапода посредством введения дополнительных элементов конструкции аппарата, обеспечивающих увеличение расстояния между телескопическими стойками и мягкими тканями искусственной модели конечности пациента, затем повторно регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек до мягких тканей искусственной модели конечности пациента; перемонтаж выполняют до получения оптимальной компоновки ортопедического гексапода, обеспечивающей исключение контакта элементов гексапода с мягкими тканями искусственной модели конечности пациента при сгибании в пределах амплитуды от 0° до 120°; регистрируют оптимальную компоновку ортопедического гексапода для индивидуальных параметров конечности пациента. Изобретения обеспечивают исключение нежелательно контакта элементов гексапода с мягкими тканями бедра и голени пациента при сгибании в пределах 120° при упрощении и облегчении процедуры перемонтажа аппарата для определения оптимальных компоновок ортопедического гексапода. 2 н. и 3 з.п. ф-лы, 21 ил.
1. Искусственная модель конечности, включающая модели бедренной и большеберцовой костей, шарнирно соединенных между собой с образованием модели коленного сустава, модель конечности дополнительно включает расположенные на соответствующих моделях бедренной и большеберцовой костей модель мягких тканей бедра и модель мягких тканей голени, каждая из которых разделена на восемь уровней, согласно методу унифицированного обозначения чрескостного остеосинтеза, причем модель имеет индивидуальные параметры конечности пациента, включающие, по меньшей мере, длины бедра и голени, а также длины окружностей бедра и голени по меньшей мере в трех частях для каждой.
2. Модель по п. 1, отличающаяся тем, что модели бедренной кости и большеберцовой кости выполнены из одного материала или материалов, выбранных из пластика, гипса, металла, резины.
3. Модель по п. 1, отличающаяся тем, что модели мягких тканей бедра и мягких тканей голени выполнены из одного материала или материалов, выбранных из пенополиуретана, резины.
4. Модель по п. 1, отличающаяся тем, что модель мягких тканей бедра и/или модель мягких тканей голени выполнена составной и разделена на части, имеющие различные длины окружностей.
5. Способ определения оптимальных компоновок ортопедического гексапода, применяемого для разработки движений при контрактурах коленного сустава, осуществляемый на модели по пп. 1-4 посредством ортопедического гексапода, включающего набор статических модулей, мобильных модулей, телескопических стоек и чрескостных элементов, способ включает следующие этапы:
- определяют индивидуальные параметры конечности пациента, включающие, по меньшей мере, длины бедра и голени, а также длины окружностей бедра и голени по меньшей мере в трех частях для каждой;
- по полученным индивидуальным параметрам конечности пациента изготавливают или подбирают предварительно изготовленную соответствующую по размерам искусственную модель конечности пациента по пп. 1-4;
- идентифицируют по восемь уровней для сегмента бедра и сегмента голени на искусственной модели конечности пациента согласно методу унифицированного обозначения чрескостного остеосинтеза;
- в проксимальном отделе сегмента бедра, на уровнях I-II, и на дистальном отделе сегмента голени, на уровнях VI-VII, накладывают статические модули и фиксируют их на искусственной модели конечности пациента посредством чрескостных элементов;
- к статическим модулям посредством телескопических стоек фиксируют соответствующие мобильные модули, которые при изменении длин телескопических стоек выполнены с возможностью изменения угла наклона и перемещения вдоль уровней сегмента голени и сегмента бедра соответственно;
- мобильный модуль сегмента бедра и мобильный модуль сегмента голени соединяют между собой шестью телескопическими стойками с образованием гексапода в области коленного сустава на искусственной модели конечности пациента;
- телескопические стойки переводят в режим, при котором длина каждой из телескопических стоек не фиксирована и мобильные модули выполнены с возможностью свободного линейного перемещения и поворота на заданный угол друг относительно друга;
- задают исходное положение каждого из мобильных модулей посредством свободного перемещения мобильных модулей и изменения длин телескопических стоек, затем выполняют сгибание коленного сустава искусственной модели конечности пациента до касания по меньшей мере одной из телескопических стоек гексапода мягких тканей искусственной модели конечности пациента, после чего регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек до мягких тканей искусственной модели конечности пациента;
- выполняют перемонтаж гексапода посредством введения дополнительных элементов конструкции аппарата, обеспечивающих увеличение расстояния между телескопическими стойками и мягкими тканями искусственной модели конечности пациента, затем повторно регистрируют амплитуду сгибания и расстояние от каждой из телескопических стоек до мягких тканей искусственной модели конечности пациента; перемонтаж выполняют до получения оптимальной компоновки ортопедического гексапода, обеспечивающей исключение контакта элементов гексапода с мягкими тканями искусственной модели конечности пациента при сгибании в пределах амплитуды от 0° до 120°;
- регистрируют оптимальную компоновку ортопедического гексапода для индивидуальных параметров конечности пациента.
| СПОСОБ ИССЛЕДОВАНИЯ ЖЁСТКОСТИ МОДЕЛЕЙ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2246139C2 |
| 0 |
|
SU160190A1 | |
| СПОСОБ КОРРЕКЦИИ СГИБАТЕЛЬНОЙ КОНТРАКТУРЫ КОЛЕННОГО СУСТАВА | 2019 |
|
RU2729021C1 |
| Модель нижней конечности | 1983 |
|
SU1156116A1 |
| DE 202011002311 U1, 29.03.2012 | |||
| US 4433961 A1, 28.02.1984 | |||
| DE 10130485 C2, 26.06.2003. | |||

