Пространственный интегрирующий волновой твердотельный гироскоп, использующий полую сферическую оболочку в качестве резонатора, относится к новому трехмерному гироскопическому датчику и может быть использован для определения параметров ориентации, в том числе угловых скоростей подвижных объектов.
В основе функционирования волнового твердотельного гироскопа (ВТГ) лежит физические явление, основанное на свойствах инерции упругих стоячих волн в твердом осесимметричном упругом теле, проявляющее себя в виде отставания угла поворота стоячей волны от поворота основания.
Известен волновой твердотельный гироскоп (патент РФ №2207510, МПК G01C 19/56, опубл. 27.06.2003 г.), содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, один электрод резонатора, закрепленный на поверхности резонатора, корпус, на котором закреплены резонатор и множество электродов корпуса, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний, вычисления угла, входной блок, соединенный с электродом резонатора, задающий блок, соединенный с электродами корпуса и электродом резонатора, электродами корпуса и электродом резонатора образованы емкостные преобразователи перемещений. Задающий блок предназначен для подачи на электрод резонатора опорного напряжения, включающего составляющие высокой частоты, и на электроды корпуса сигналов управления, включающих нулевой потенциал для работы емкостных преобразователей перемещений. Входной блок содержит усилитель, перемножитель-демодулятор, на который подается опорное напряжение, фильтр низких частот, устройства хранения данных, сигнал на которые записывается синхронно с подачей нулевого потенциала на электроды по соответствующим осям резонатора, дифференциальные усилители для суммирования выходных сигналов и устройства формирования выходных сигналов по собственным осям колебаний резонатора.
Также известен волновой твердотельный гироскоп (патент РФ №2182312, МПК G01C 19/56, опубл. 10.05.2002 г), содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на внешней или внутренней поверхности резонатора, корпус, на котором закреплены резонатор, множество электродов датчиков и электродов управления, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, соединенный с электродами резонатора, электродами датчиков, электродами управления и содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний и вычисления угла, отличающийся тем, что электрод резонатора, закрепленный напротив электродов датчиков, присоединен к нулевому потенциалу, а электроды датчиков - к источникам опорных переменных токов высокой частоты, электродами датчиков и электродом резонатора образованы емкостные преобразователи перемещений. Электронный блок управления дополнительно содержит источники опорных переменных токов высокой частоты, дифференциальные усилители-сумматоры сигналов с емкостных преобразователей перемещений, устройства детектирования и фильтрации низких частот для выделения сигналов колебаний резонатора. Электроды управления и электроды датчиков закреплены на одной поверхности корпуса.
Недостатком указанных гироскопов является большое время вхождения в рабочий режим, обусловленное высокой добротностью резонатора.
Известен волновой твердотельный гироскоп (патент РФ №2168702, МПК G01C 19/56, опубл. 10.06.2001 г.), содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации по меньшей мере на одной из множества мод стоячих волн, по меньшей мере один электрод резонатора, закрепленный на внешней или внутренней поверхности резонатора, корпус, на котором закреплены резонатор, множество электродов датчиков, электродов управления, находящихся в непосредственной близости к одному или более электродам резонатора, электронный блок управления, соединенный с электродами резонатора, электродами датчиков, электродами управления и содержащий устройства стабилизации амплитуды колебаний, подавления квадратурных колебаний, вычисления угла, отличающийся тем, что дополнительно закреплен по меньшей мере один электрод на торцевой поверхности резонатора, а электроды датчиков закреплены на поверхности корпуса, параллельной торцевой поверхности резонатора, напротив электродов, закрепленных на торцевой поверхности резонатора. Электроды, закрепленные на торцевой поверхности резонатора, присоединены к нулевому потенциалу, а электроды датчиков - к источникам опорных переменных токов высокой частоты, электродами датчиков и электродами, закрепленными на торцевой поверхности резонатора, образованы емкостные преобразователи перемещений. Электронный блок управления дополнительно содержит источники опорных переменных токов высокой частоты, дифференциальные усилители-сумматоры сигналов с емкостных преобразователей перемещений, устройства детектирования и фильтрации низких частот для выделения сигналов колебаний резонатора. Электроды на торцевой поверхности резонатора электрически соединены с электродом резонатора, а электроды управления закреплены на поверхности корпуса напротив электрода резонатора.
Недостатком приведенной конструкции является низкая точность и стабильность гироскопа, обусловленная погрешностью определения положения колебательной картины из-за наличия раздельного выделения сигналов колебаний резонатора по собственным осям.
Известен волновой гироскоп твердотельный (патент РФ №2708907, МПК G01C 19/56, опубл. 12.12.2019 г.), принимаемый за прототип, который содержит резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления, в котором электронный блок управления содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер, при этом выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний, причем выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором.
Недостатком приведенной конструкции ВТГ, принятой за прототип, является невозможность определения трех компонент вращательного движения подвижного объекта, характеризующих его пространственное угловое положение, то есть, параметры ориентации подвижного объекта.
Задачей изобретения является расширение функциональных возможностей ВТГ - обеспечение возможности ВТГ определения трех компонент вращательного движения подвижного объекта, характеризующих его пространственное угловое положение - параметры ориентации подвижного объекта.
Техническим результатом является возможность определения трех компонент вращательного движения подвижного объекта, характеризующих его ориентацию в пространстве.
Поставленная задача достигается тем, что волновой твердотельный гироскоп, содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления, в котором электронный блок управления содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер, при этом выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний, причем выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором, отличающийся тем, что резонатор выполнен в виде пространственного вакуумированного модуля, состоящего из концентрически размещенных одна внутри другой наружной и внутренней полых сфер из магнитного материала с взаимно-противоположным направлением намагничивания, причем в внутренней сфере размещен источник питания, обмотки электромагнитного центрирования и блок управления, а на наружной стороне внутренней сферы размещены электроды управления и вспомогательный электрод; на внутренней стороне наружной сферы размещены датчики измерения положения стоячей волны и на наружной стороне наружной сферы размещены обмотки электромагнитного центрирования, а пространственная стоячая волна возбуждается в тонкостенной сфере, выполненной из материала с малыми параметрами внутреннего трения, охватывающей снаружи внутреннюю сферу через немагнитные втулки.
Выполнение конструкции резонатора в виде пространственного вакуумированного модуля, состоящего из концентрически размещенных одна внутри другой наружной и внутренней полых сфер из магнитного материала с взаимно-противоположным направлением намагничивания и обмотками электромагнитного центрирования позволяет реализовать комбинированный бесконтактный подвес тонкостенной сферы, выполненной из материала с малыми параметрами внутреннего трения и охватывающей снаружи внутреннюю полую сферу через немагнитные втулки. Тем самым обеспечивается возможность параметрического возбуждения на ее внешней поверхности пространственной механической стоячей волны, позволяющей в итоге определять три компоненты вращательного движения подвижного объекта, характеризующих его ориентацию в пространстве, решая поставленную задачу изобретения.
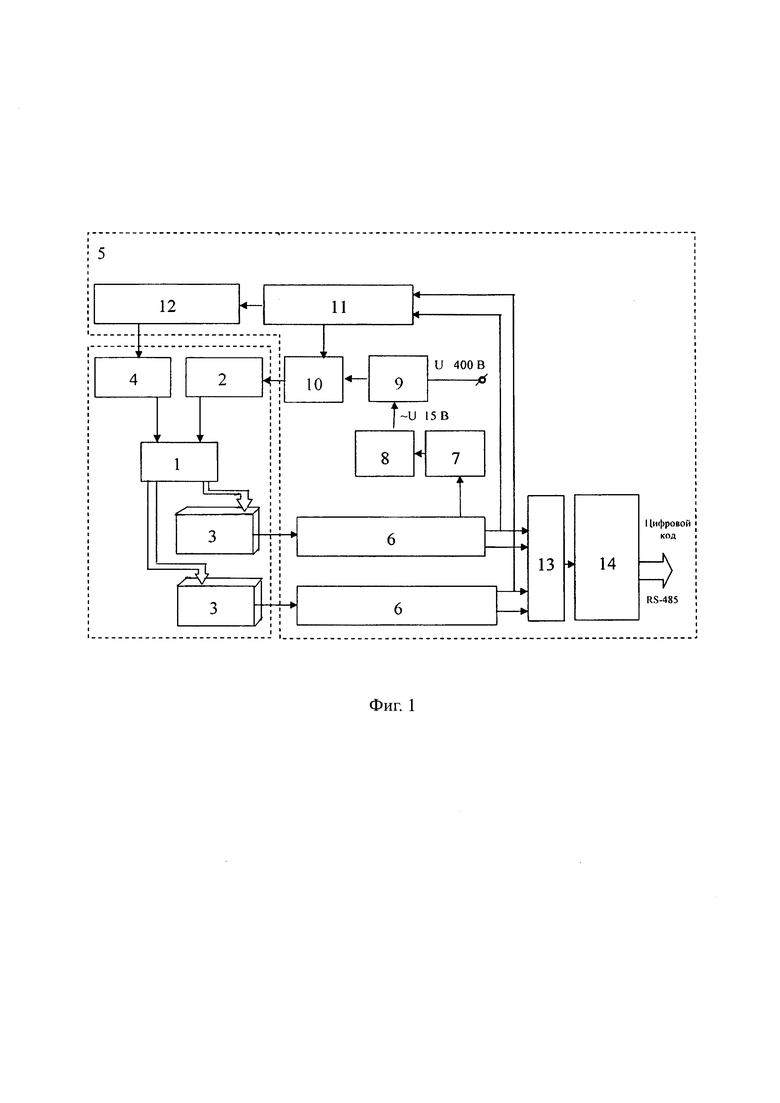
На фиг. 1 представлена структурная схема пространственного интегрирующего волнового твердотельного гироскопа, на фиг. 2 схематично представлена конструкция резонатора в виде пространственного вакуумированного модуля.
Пространственный интегрирующий волновой твердотельный гироскоп содержит резонатор 1 в виде пространственного вакуумированного модуля, один вспомогательный электрод резонатора 2, восемь электродов датчиков 3, объединенных в две группы по четыре штуки в каждой, шестнадцать электродов управления 4 и электронный блок управления 5. Электронный блок управления 5 содержит два устройства вычисления угла 6, компаратор с гистерезисом 7, устройство фазовой автоподстройки частоты 8, модулятор 9, сумматор 10, устройство подавления квадратурных колебаний 11, устройство стабилизации амплитуды колебаний 12, аналого-цифровой преобразователь 13 и микроконтроллер 14. Электронный блок управления 5 соединен с резонатором 1 через электрод резонатора 2, электроды датчиков 3 и электроды управления 4. Выходы электродов датчиков 3 соединены с устройствами вычисления углов 6, при этом выход одной группы из четырех электродов датчиков 3 соединены с устройством вычисления синфазной составляющей углов 6, а выход другой группы из четырех электродов датчиков 3-е устройством вычисления квадратурной составляющей углов 6. Один выход устройства вычисления синфазной составляющей углов 6 соединен последовательно с компаратором с гистерезисом 7, устройством фазовой автоподстройки частоты 8, модулятором 9 и сумматором 10. Четыре выхода устройств вычисления синфазной и квадратурной составляющих угла 6 соединены через аналого-цифровой преобразователь 13 с входом микроконтроллера 14. При этом один выход устройства вычисления синфазной составляющей углов 6 и один выход устройства вычисления квадратурной составляющей углов 6 соединены через устройство подавления квадратурных колебаний 11 с входом устройства стабилизации амплитуды колебаний 12.
Резонатор 1 в виде пространственного вакуумированного модуля состоит из наружной 15 и внутренней 16 полых сфер из магнитного материала с взаимно-противоположным направлением намагничивания, концентрически размещенных одна внутри другой. В внутренней сфере 16 размещен источник питания 19 с преобразователем DC-AC для питания обмоток электромагнитного центрирования 17, установленных в внутренней сфере 16, а также блок управления 5. На наружной стороне внутренней сферы 16 размещены электроды управления 4 и вспомогательный электрод 2, а на внутренней стороне наружной сферы 15 размещены датчики 3 измерения положения стоячей волны - съема информации. (*На фиг. 2 условно не показаны). На наружной стороне наружной сферы 15 размещены обмотки электромагнитного центрирования 18. Пространственная стоячая волна возбуждается в тонкостенной сфере 21, выполненной из материала с малыми параметрами внутреннего трения (то есть, высокой добротностью), охватывающей снаружи через немагнитные втулки 20 внутреннюю сферу 16.
Пространственный интегрирующий волновой твердотельный гироскоп работает следующим образом.
При включении гироскопа - при подаче напряжения питания на обмотки электромагнитного центрирования (17, 18) активируется пространственный вакуумированный модуль резонатора 1, обеспечивая бесконтактный подвес внутренней полой сферы 16 и тонкостенной сферы 21, выполненной из материала с малыми параметрами внутреннего трения, например, из аморфного или нанокристаллического металла/сплава, охватывающей снаружи внутреннюю полую сферу 16 через немагнитные втулки 20.
Для параметрического возбуждения пространственной механической стоячей волны к тонкостенной сфере 21 прикладываются две диаметрально противоположные силы, создаваемые электродами управления 4, подключенными к схеме возбуждения электронного блока управления 5. Под действием приложенных сил тонкостенная сфера 21 примет эллипсоидальную форму. Приложенные силы в заданные моменты времени становятся равными нулю, а тонкостенная сфера 21, обладающая определенной жесткостью, проходя через недеформированное состояние, под действием сил инерции будет деформироваться в ортогональном направлении. Возбуждение пространственной стоячей волны в тонкостенной сфере 21 происходит в режиме автогенератора на собственной частоте колебаний.
Отметим, что в научных работах авторов [V. Zhuravlev, S. Perelyaev, D. Borodulin “Strapdown inertial navigation system of minimum dimension (3D oscillator as a complete inertial sensor”. 2018 DGON Inertial Sensors and System (ISS), September 11-12, 2018. Braunschweig, Germany; V. Zhuravlev, S. Perelyaev, D. Borodulin “The Generalized Foucault Pendulum is a 3D Integrating Gyroscopes Using the Three-Dimensional Precession of Standing Waves in a Rotating Spherically Symmetric Elastic Solid”. 2019 DGON Inertial Sensors and System (ISS), September 10-11, 2019. Braunschweig, Germany; Zhuravlev V. Ph., Perelyaev S.E. "3-D Micromashined Spherical Shell Resonators: Implementation Vision". Inertial Sensors and Systems. International Scientific - Practical Conference «iNFORMATION INNOVATIVE TECHNOLOGIES», 2019] показано, что для полной 3-D сферической оболочки коэффициент Брайана равен примерно 0,25 и он носит пространственный характер. Коэффициент Брайана определяет пропорциональность друг другу векторов угловых скоростей. Поэтому стоячая волна в виде, к примеру, эллипсоида, прецессирует относительно тела (в данном случае подвижного объекта) с вектором угловой скорости, пропорциональным вектору угловой скорости самого тела относительно абсолютного пространства.
По достижении заданной амплитуды колебаний тонкостенной сферы 21 электроды управления 4 отключаются, и включается вспомогательный электрод резонатора 2, поддерживающий постоянство амплитуды колебаний в тонкостенной сфере 21 для любого положения стоячей волны относительно основания. При колебаниях тонкостенной сферы 21 изменяется площадь перекрытия электродов датчиков 3, выполняющих функцию измерения положения стоячей волны. Выходные сигналы электродов датчиков 3, соответствующие трем компонентам вектора входной угловой скорости подвижного объекта, подаются на устройства вычисления углов 6, в которых измеряются синфазные и квадратурные составляющие выходных сигналов электродов датчиков 3. Синфазные и квадратурные составляющие сигналов, последовательно поступающие на аналого-цифровой преобразователь 13 и микроконтроллер 14, преобразуются в цифровой код. Синфазные составляющие выходных сигналов с устройств вычисления угла 6 подаются через устройство подавления квадратурных колебаний 11 на устройство стабилизации амплитуд колебаний 12. Выходной сигнал с устройства вычисления угла 6 последовательно подается на компаратор с гистерезисом 7, устройство фазовой автоподстройки частоты 8, модулятор 9 и сумматор 10. При этом на сумматор 10 одновременно подаются выходной сигнал модулятора 9 и выходной сигнал устройства подавления квадратурных колебаний 11. Выходной сигнал сумматора 10 подается на вспомогательный электрод резонатора 2 и обеспечивает поддержание постоянной амплитуды колебаний на поверхности полой сферы 21 (в тонкостенной сфере 21).
Укажем, что величина осевой "жесткости" пространственного вакуумированного модуля резонатора обеспечивается конструктивно на этапе проектирования, исходя из заданных параметров линейного и углового движения подвижного объекта, а также выбором параметров обмоток электромагнитного центрирования (17, 18) - то есть, формой и количеством витков, напряжением питания и др.; а также геометрическими размерами - (в том числе толщиной) внутренней 16 и наружной 15 сфер из магнитного материала с взаимно-противоположным направлением намагничивания, определяющими величину магнитной энергии, характеризующей силы взаимного отталкивания. Внутренняя 16 и наружная 15 сферы из магнитного материала с взаимно-противоположным направлением намагничивания могут быть изготовлены из магнитотвердых материалов, обладающих большими значениями величин магнитной индукции и коэрцитивной силы на основе редкоземельных элементов, например, NdFeB.
Тонкостенная сфера 21, на поверхности которой создается пространственная механическая стоячая волна, выполнена из материала с малыми параметрами внутреннего трения, например, из аморфного или нанокристаллического металла/сплава.
Отметим, что аморфные сплавы представляют собой новый особый класс прецизионных сплавов, отличающийся от кристаллических сплавов структурой, способом изготовления, областью существования на температурно-временной диаграмме и свойствами.
В 60-х годах прошлого века эксперименты по быстрому охлаждению металлических расплавов, которые проводились с целью получения субмикроскопической структуры металла, обнаружили, что в некоторых случаях кристаллическая решетка в металле вообще отсутствует, а расположение атомов характерно для бесструктурного, аморфного тела.
Структура аморфных сплавов подобна структуре замороженной жидкости и характеризуется отсутствием дальнего порядка в расположении атомов. Оказалось, что у аморфного металла совсем другие, не сходные свойства с кристаллическим металлом. Он становится в несколько раз прочнее, повышается его стойкость к коррозии, меняются электромагнитные характеристики и даже одна из самых устойчивых констант - модуль упругости. В отличие от сплавов с кристаллической структурой, технология получения которых имеет серьезные проблемы, связанные с антагонизмом свойств компонентов на этапе кристаллизации, в аморфных сплавах прекрасно соединяются все необходимые компоненты. При сверхбыстром охлаждении сплав затвердевает, прежде чем компоненты-антагонисты успевают проявить свой антагонизм. Это открывает широчайшие возможности поиска оптимальных комбинаций компонентов для получения конкретных свойств.
Аморфные сплавы получили название металлических стекол. Аморфное состояние сплавов достигается подбором химического состава и использованием специальной технологии охлаждения из расплава со скоростью выше критической, определенной для каждого состава. Отсутствие дислокаций приводит к тому, что металлические стекла по прочности превосходят самые лучшие легированные стали. Высокая твердость влечет за собой их великолепную износостойкость. Другим важнейшим преимуществом аморфных металлических сплавов является их исключительно высокая коррозионная стойкость. Во многих весьма агрессивных средах (морской воде, кислотах) металлические стекла вообще не коррозируют. Например, скорость коррозии аморфного сплава, содержащего железо, никель и хром, в растворе соляной кислоты практически равна нулю. Одна из основных причин такой высокой коррозионной стойкости аморфных сплавов состоит в том, что, не имея кристаллической решетки, они лишены и характерных "дефектов" кристаллов - дислокаций и, главное, границ между зернами. Высокая плотность упаковки атомов в кристалле вблизи этих "дефектов" уменьшается столь резко, что вдоль них легко проникают в металл "вражеские агенты". Важно, что бездефектная структура аморфного сплава придается той тонкой окисной пленке, которая образуется на его поверхности на начальных стадиях коррозионного процесса и в дальнейшем защищает металл от прямого контакта с "агрессором". Причем термообработка, деформирование и тому подобное влияет на внутреннюю структуру аморфных металлов. Сплавы, получаемые путем сверхбыстрого охлаждения из жидкого состояния или конденсацией пара на охлажденных подложках, не являются термодинамически стабильными и последующий отжиг, не приводящий к кристаллизации, сопровождается изменениями в структуре, в результате которых происходит уплотнение, увеличение модуля Юнга, охрупчивание, подавление диффузионных процессов, уменьшение внутреннего трения, изменение магнитных свойств и так далее. Поэтому в аморфных металлах отсутствуют в значительном количестве локализованные вакансионно-подобные эффекты - дислокации, вакансии, границы зерен и прочее [Золотухин И.В. Физические свойства аморфных металлических материалов. - М.: Металлургия, 1986 г. - 176 с].
Вторым представителем нового класса метастабильных быстроохлажденных сплавов и активным соперником аморфных сплавов являются нанокристаллические сплавы. Их особенность сверхмелкокристаллическая структура. Размер кристаллов (наночастицы) в этих сплавах составляет от 1 до 10 (нм). Нанокристаллические и аморфные сплавы - ближайшие родственники. Их "родство" основано на двух обстоятельствах. Во-первых, это структурное сходство. Как известно, структура аморфных сплавов имеет ближний порядок, то есть состоит из упорядоченных микрогруппировок атомов, размеры которых близки к размерам нанозерен нанокристаллических сплавов. Во-вторых, это технология получения. В настоящее время наиболее распространенным методом получения наноструктуры является регулируемая кристаллизация из исходного аморфного состояния. Таким образом, "материнской" основой нанокристаллического сплава является аморфный сплав. Структура нанокристаллического сплава представляет собой двухфазную систему, одной из фаз которой являются нанокристаллы, а другой - остаточная аморфная матрица. Свойства наносплава зависят от состава, размера и количества нанокристаллов, а также их соотношения с аморфной фазой.
Укажем, что из-за таких особенностей строения внутренней структуры параметр - ζ - интенсивность внутреннего трения у аморфных сплавов, например, на основе циркония (Zr), составляет величину примерно ζ≈0,0002-0,0003 [S. Bossuyt,  J. Schroers. Resonant vibration
J. Schroers. Resonant vibration
analysis for temperature dependence of elastic properties of bulk metallic glass. // J. Mater. Res., Vol. 22, No. 2, Feb. 2007, p.p. 533-537], что позволяет получить добротность Q тонкостенной сферы 21, в которой создается пространственная стоячая волна, величиной Q≈500000…700000 и более.
Тонкостенная сфера 21, в которой создается пространственная стоячая волна для пространственного интегрирующего твердотельного волнового гироскопа может быть изготовлена, например, - способом охлаждения, при котором струя жидкого металла с определенной скоростью направляется на поверхность быстро вращающегося цилиндра, изготовленного из материала с высокой теплопроводностью, - из тонкого листа аморфного сплава, из которого после этого в режиме сверхпластической формовки в состоянии переохлажденной жидкости выдувается требуемая полусферическая форма с последующей требуемой механической обработкой [J. Schroers, Т. Hodges, G. Kumar, Н. Raman, А. Barnes, Q. Pham, Т. Waniuk // Thermoplastic blow molding of metals // Materials Today, Jan-Feb 2011, Volume 14, No. 1-2, p.p. 14-19].
Технический результат заключается в обеспечение возможности предложенной конструкции пространственного интегрирующего твердотельного волнового гироскопа определять три компоненты вращательного движения подвижного объекта, характеризующих его пространственное угловое положение - параметры ориентации подвижного объекта. Кроме того, при неравномерном движении подвижного объекта по величине тока в цепи обратной связи элементов системы электромагнитного центрирования (17, 18) дополнительно можно дать оценку и определить величины ускорений подвижного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Твердотельный волновой гироскоп | 2019 |
|
RU2708907C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2018 |
|
RU2670245C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2182312C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2000 |
|
RU2168702C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНЫМ ВОЛНОВЫМ ГИРОСКОПОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194249C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2207510C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2001 |
|
RU2185601C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА | 2001 |
|
RU2186340C1 |

Изобретение относится к гироскопическому приборостроению и может быть использовано для измерения угловых скоростей подвижных объектов. Пространственный интегрирующий волновой твердотельный гироскоп содержит резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления, в котором электронный блок управления содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер, при этом выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний. Причем выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором. Резонатор выполнен в виде пространственного вакуумированного модуля, состоящего из концентрически размещенных одна внутри другой наружной и внутренней сфер из магнитного материала с взаимно противоположным направлением намагничивания, причем во внутренней сфере размещен источник питания, обмотки электромагнитного центрирования и блок управления, а на наружной стороне внутренней сферы размещены электроды управления и вспомогательный электрод. На внутренней стороне наружной сферы размещены датчики измерения положения стоячей волны и на наружной стороне наружной сферы размещены обмотки электромагнитного центрирования, а пространственная стоячая волна возбуждается в тонкостенной сфере, выполненной из материала с малыми параметрами внутреннего трения, охватывающей снаружи внутреннюю сферу через немагнитные втулки. Технический результат – расширение функциональных возможностей твердотельного волнового гироскопа за счет обеспечения возможности предложенной конструкции пространственного интегрирующего твердотельного волнового гироскопа определять три компоненты вращательного движения подвижного объекта, характеризующие его пространственное угловое положение - параметры ориентации подвижного объекта. 2 ил.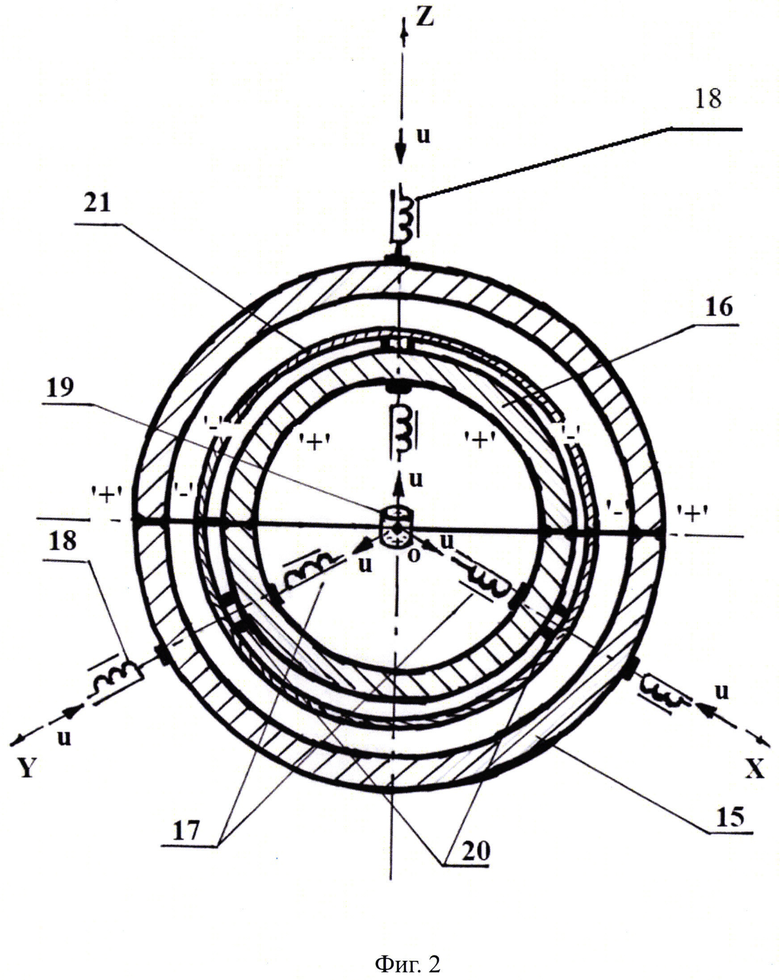
Пространственный интегрирующий волновой твердотельный гироскоп, содержащий резонатор в виде осесимметричного тонкостенного элемента, способного к вибрации, один электрод резонатора, множество электродов датчиков, электродов управления, электронный блок управления, содержащий устройства вычисления угла, стабилизации амплитуды колебаний, подавления квадратурных колебаний и соединенный с электродами резонатора, электродами датчиков, электродами управления, в котором электронный блок управления содержит компаратор с гистерезисом, устройство фазовой автоподстройки частоты, модулятор, сумматор, аналого-цифровой преобразователь, микроконтроллер, при этом выходы устройств вычисления угла соединены через аналого-цифровой преобразователь с микроконтроллером, а также через устройство подавления квадратурных колебаний с устройством стабилизации амплитуды колебаний, причем выход устройства подавления квадратурных колебаний соединен с входом сумматора, выход одного из устройств вычисления угла последовательно соединен с компаратором с гистерезисом и устройством фазовой автоподстройки частоты, выход которого через модулятор соединен с сумматором, отличающийся тем, что резонатор выполнен в виде пространственного вакуумированного модуля, состоящего из концентрически размещенных одна внутри другой наружной и внутренней полых сфер из магнитного материала с взаимно противоположным направлением намагничивания, причем во внутренней сфере размещен источник питания, обмотки электромагнитного центрирования и блок управления, а на наружной стороне внутренней сферы размещены электроды управления и вспомогательный электрод; на внутренней стороне наружной сферы размещены датчики измерения положения стоячей волны и на наружной стороне наружной сферы размещены обмотки электромагнитного центрирования, а пространственная стоячая волна возбуждается в тонкостенной сфере, выполненной из материала с малыми параметрами внутреннего трения, охватывающей снаружи внутреннюю сферу через немагнитные втулки.
| Твердотельный волновой гироскоп | 2019 |
|
RU2708907C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ПРЕЦИЗИОННЫЙ ТВЕРДОТЕЛЬНЫЙ КВАНТОВЫЙ ГИРОСКОП НЕПРЕРЫВНОГО ДЕЙСТВИЯ НА БАЗЕ СПИНОВОГО АНСАМБЛЯ В АЛМАЗЕ | 2017 |
|
RU2684669C1 |
| 0 |
|
SU187102A1 | |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2001 |
|
RU2218554C2 |
| CN 106482721 B, 12.04.2019. | |||

